毕业论文
水果品质自动分级的机器视觉系统
摘要
水果和蔬菜,通常以批次的形式提供给消费者消费。而水果的均匀性和外观对消费者的决策有着重大的影响。由于这个原因,农农产品的展现无论是在田地里还是在最后流向消费者的不同阶段,都会被处理,而且通常是朝着同类产品的清洗和分类方面来进行的。该项目的ESPRIT3,参考9230。集处理,检查和包装水果和蔬菜于一体的综合系统(英文简写SHIV A)形成了一种自动、无损检测和处理的水果的机器人系统。本文的目的是报告在Valenciano de Investigaciones Agrarias研究所研究的对桔子,桃子,苹果品质进行实时测评而发展起来的机器视觉技术,并评估该技术在下列质量属性:大小,颜色,茎的位置及外部瑕疵检测中的效率。此种分解研究,在贝叶斯判别分析的基础上,使用并且允许水果因背景不同而精确的进行区分。因此,尺寸的确定性恰当的得到了解决。水果由此系统测出的颜色,和目前被用作标准的色度指标值非常吻合。在茎块的定位和瑕疵的检测中也取得了良好的效果。该系统在用大批量苹果进行在线测试分级后也取得了很不错的表现,并且并在缺陷检测和规模估计中分别取得了86%和93%的重复一致性。此系统的准确性和可重复性和人工分级几乎一样。
1.简介
机器视觉在水果和蔬菜检验中的应用在最近几年有所增加。如今,世界各地的一些制造商生产按水果大小,颜色和重量进行水果前期分级的分拣机。然而,市场不断地要求更高质量的产品,因此,其他功能已经发展来提高机器视觉检测系统(例如茎定位,确定主,副皮肤的颜色,检测污点)。
大小,是第一个与质量有关的参数,已经通过使用机器视觉测量周长或直径其中任一种得到了测量(陶等,1990;Varghese等,1999),周长(萨卡&沃尔夫,1985)或直径(布罗迪等。,1994)。颜色也是一个重要的品质因素,已被广泛研究(Singh等人,1992年,1993年。哈恩,2002年;多布然斯基和Rybczynski,2002)。
有些水果有一种颜色均匀分布在皮肤表面,我们称之为主色。该平均表面颜色对这些水果来说是一个很好的质量指标。然而,一些其他水果(例如桃子,苹果,西红柿)有次要颜色可作为一种成熟的良好指标。在这种情况下,它是不可能完全只把全球面色彩作为质量参数的。
在桔子,桃子,苹果这些水果中,有必要进行长茎检测,以避免损害其他水果,或者是因为没有他们可能意味着质量损失。已经有若干解决方案被提出了来确定茎的位置,如:使用结构的照明检测苹果凹陷(杨,1993);颜色分割技术来区分柑橘类水果的花萼和茎块(鲁依斯等,1996);或研究苹果光的反射(彭曼,2002)。
有时候,茎容易混淆成皮肤上的缺陷或瑕疵。损伤和擦伤检测是质量评价的一个关键因素。众多苹果擦伤检测方法中有一种是基于对干扰过性滤器的使用(Rehkugler&斯鲁普,1986年)。其他研究同时进行瑕疵处理和颜色评定这两项。(米勒和Delwiche,1989年;勒费弗尔等,1994;切鲁托等,1996;莱曼斯等,1999,2002; Blasco及蜕皮澳,2002年)。最近的技术结合红外和可见的信息来检测瑕疵(Aleixos等,2002)或者使用高光谱成像(Peirs等,2002)。
这项工作的目的是报告在项目ESPRIT3(参考9230的集处理,检查和包装水果和蔬菜于一体的综合系统,英文简写SHIV A),该技术在其他地方被描述过(墨尔特等,1997,1998),和Valeenciano Agrarias(IVIA)研究所在1998年三月进行的测试中取得的成果的基础上发展而来的图像分析技术。该视觉系统是为了在线测量与桔子,桃子,苹果质量有关的几个参数,如大小,以及鉴定次要色点(桃和苹果一些种类的水果需要),茎块位置或斑点的存在。水果要在不1秒的时间里于四个不同角度被检测。为了评估视觉系统的效率,自动检验的性能和重复性和专家们的人工检测进行了比较。
2.材料与方法
2.1.硬件
机器视觉系统是由一个三电荷耦合器件(CCD)彩色摄像机(索尼XC003P)和一个图像采集卡(流星的Matrox)组成的,并被连接到了一台可兼容的个人电脑[奔腾200兆赫,48Mb随机存取存储器(RAM)]。该系统提供了768每576像素的图像,以35mm每像素实现。图像采集卡从相机撷取并解码复合视频信号为在红,绿,蓝色坐标(RGB)的三个用户定义的缓冲区。
照明系统是一个环形日光灯管组成的,里面内室涂有白色亚光半球形荧光,并在顶部有一个洞来放置相机。由在于日光灯管和场景之间放置了用于保护的反射面,避免了直射向水果的光。
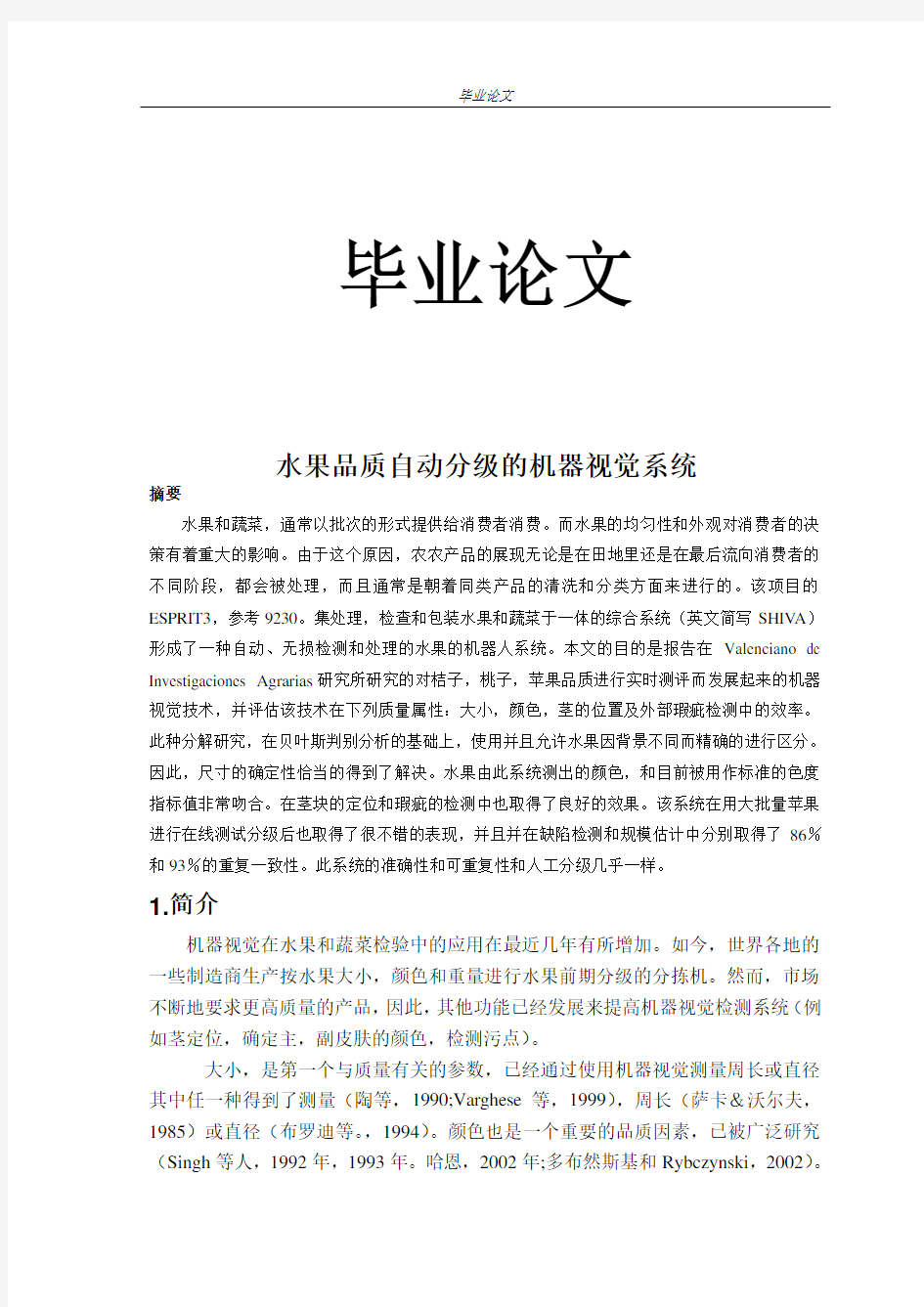
视觉系统是用于自动检测,处理和包装的机器人系统中一部分。进入检查室前的水果都被单个化处理了,然后传递给一系列的移动真空杯,他们有旋转和翻译能力,能使水果在四个不同角度传递给相机,使其不位于重叠的位置,以尽量多的检查水果的表面(图1)。
2.2.图像分析
图像分析是由IVIA用编程语言C研发的一个特定的应用软件来来执行的,在磁盘操作系统下运行(DOS)。该软件分为两模块:一个为培训系统的应用;另一个为命令采集,处理图像,并提供各水果质量估计参数给机械控制系统。
系统需要离线预先训练。利用录制的水果图像,专家选择不同区域的图像和分配所有每一个地区像素于其中一个预先确定的类别:背景,原色,次主色,一般伤害类型1,一般伤害类型2,特定的功能,茎,花萼。由于分类采用这样一种方式,所以他们对所有类型的水果都适用。训练系统分别单一颜色的水果,此主色类没有使用。用两个类颜色方法检测一般的损害是合理的,因为每个种类的水果都有不同的颜色的缺陷,可以区分为明亮的与黑暗的。另一个预先定义的类被用于检测水果的特定特点,如金冠苹果的赤褐色度。
由于每个类代表性的区域已选定,贝叶斯判别模型被创建,它利用像素的三个基本色:红色,绿色和蓝色作为独立变量(RGB)。贝叶斯判别分析包括对上述每个类别的RGB值组合的概率的计算。一个阿雷尔(1991)描述的算法被应用,即采用不同的协方差矩阵为每个类,它的结果在二次判别模型。此过程可参考表来进行。该表,存储在计算机内存中并在网上操作时给予咨询,允许每个像素的图像分配到最接近匹配的类.水果的颜色,作为水果成熟的状态标志,即是是在同一种水果里,也可以因为许多因素而略有不同。由于此分割方法极大地依赖于每个水果的像素颜色,它是对这些变化非常敏感。出于这个原因,该系统需要进行测试,并且对每个测试期都要创建一个新的表格。
图1(a)第一图像的采集(b)第二个图像的采集-杯1旋转水果120°(c)第三个图像的采集-杯1将水果再旋转120°(d)第四图像的采集-杯2抓住水果并旋转180°
在线操作最先要获取第一幅图像,并利用上面提到的表格将其按先前定义的类进行分类(图.2(a))。
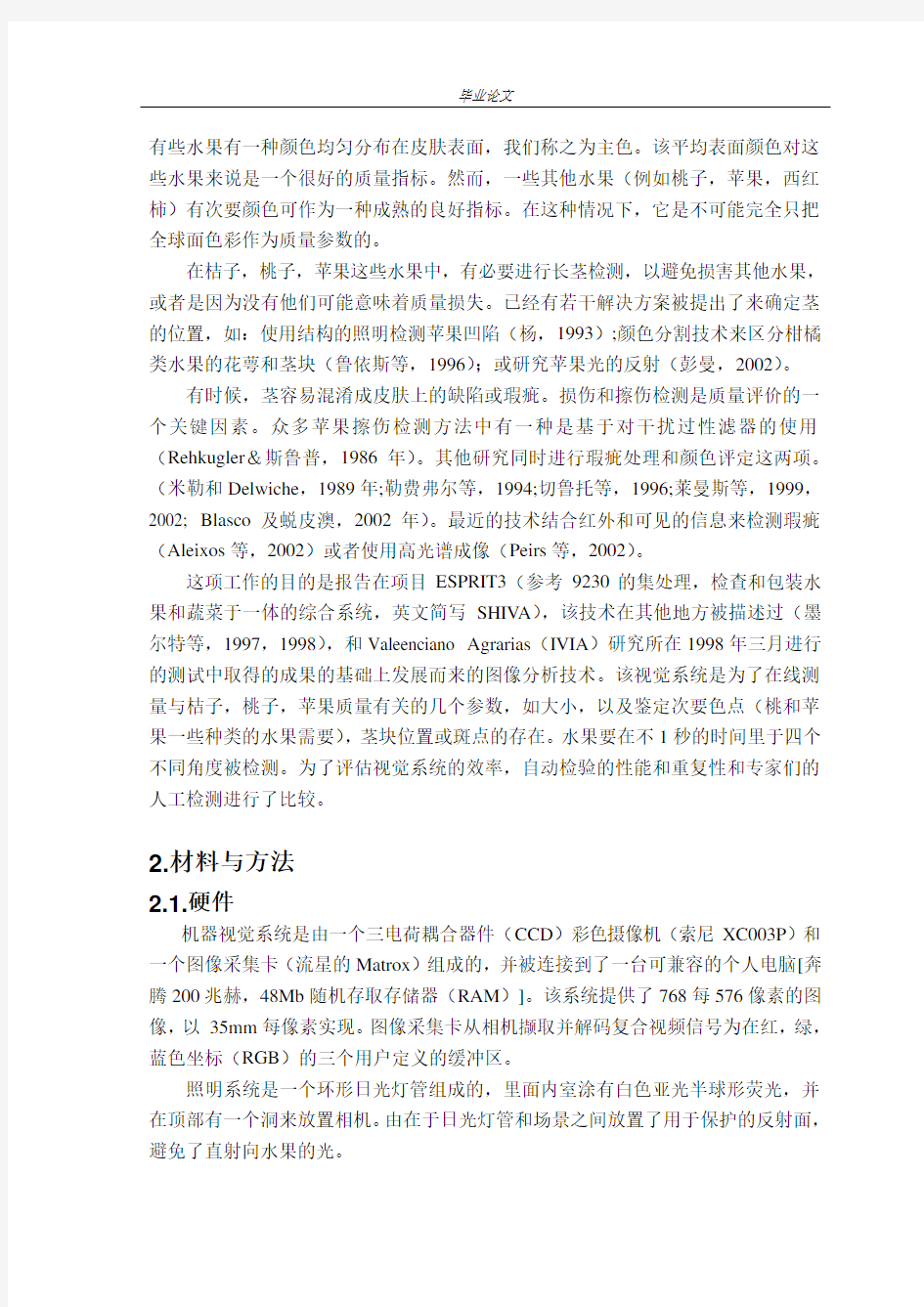
图2 (a) 照相机拍摄的原始图像(b)分割图像显示完好皮肤,褐色化度,茎块和损坏区域(c)除了茎和背景以外的所有区域,用来计算的大小类别(d)展示了大小如何估计的图像
同一种类的八个相连的像素中的每一份被认为是相互独立的区域。然后,为了
加快轮廓提取的进程,基于模滤波器的缓和程序被应用到了分段的图像,以便平缓
图像之间的毗邻地区及消除孤立的不良分类像素[图. 2(b)]
第二步由提取特性来将水果按大小进行分类构成。单值图像中的前景是水果的
图像,认为是各区域形成的,除了那些被视为背景或茎块的区域。然而茎块并不认
为是水果的一部分,因为较长的茎块可能导致错误的测量尺寸(图. 2(c))。然后,
对水果区域边界进行提取并编纂通过用链码为基础的算法(弗里曼,1961年)来
计算量做惯性主轴的长度面积和尺寸(图. 2(d))。
在第三步中,各地区不再视作为单果,每个独立的区域面积却要被测定(图. 3(a))。为了纠正分割过程中产生的错误,表面积少于一定的阈值的区域被认为是无效的分类像素。对于有效的地区,根据他们的像素所处类别不同,不同的参数被计算。例如,在有任何类各地区组成的损害像素区域中,长度和面积分别计算。在被划为茎块的区域的情况中,只有共同的坐标质心进行了测定。在检测到多茎块的情况中,最长的区域被选定为'真正的' 茎块,其他的认为是干扰(图3(b))。在分配到基本和次等的颜色区域,质心及颜色RGB均值要计算。该流程的整个过程如图4所示。该水果四个角度被不断重复。
当最后一个图像被处理时,每个果实下列特征都要测量:
(1)主要损伤的长度——定义为主要区域的长度,归类为损伤,在上面四种视角中都有;
(2)损伤面积——等同于所有受伤区域的总和,在四个独立的视角中;
(3)茎和瑕疵——需要考虑,如果在四种视角中的任一种中发现;
(4)基础色——计算作为基础的颜色,在每个独立的视角中统计
(5)次主色——计算作为次要主色,在每个独立的视角中统计
(6)水果的尺寸——根据现在的标准,尺寸是根据替代物的尺寸测来的。由于水果不具有方向性,水果都是由离茎最近的地方开始定位测量的。如果茎在少于两张图像中看到,该水果的尺寸就被当做其他四幅图像的水果的平均尺寸。
尽管一些用于颜色描述的立体模型,作为HIS或La * b *值,描述的颜色和我们的感觉很接近,但RGB系统被用来描述是由于图像采集卡直接提供本系统中的图像的像素颜色,所以后面的进一步消耗的计算资源的转换是不需要的。
图3 (a)分割图像显示褐色度,茎和损坏的区域(b)图像显示周长,褐色度中心和茎区和最长损害区的长度
2.3该系统的性能评价
2.3.1.分割程序
虽然分割方法的可靠性可由系统通过结果和可重复推导出来,为了在水果的图
像上分析分割程序通常要做个初步试验。在这些测试中,代表团体桔子,桃子,苹果的图像的像素,对应于其背景,皮肤完整度,损伤和茎秆(除了桃子),被人工选定生成基于贝叶斯非线性判别的判别分析函数。这些功能在一个独立设置的像素上进行了测试,属于不同图像,也是人工选定。两个独立设置的像素的使用保证了分类器的估计的性能是没有偏见性的。
2.3.2.色彩估计
为了评估利用开发的传感器估计的演的精度,颜色测量取自22西红柿几个表面。这些部位从一个红绿色颜色变动为红色。机器视觉系统确定果实颜色的能力通过比较常用于不同的水果的几种标准色指数得到了计算。这些指数从猎人实验室获得,和由三色度计圆形区域(8毫米直径)在选定的每一个部门随机提供的值一致。2.3.3.茎定位
为了评估该对茎的位置的算法的性能,每一个,100个桔子随机的角度图片和100苹果的都被使用。在桃子的情况下,76个水果中每个水果都随机取向的取了两个图像,共提出了152图像。该图像分析算法得到了应用同时茎的重心也显示在了电脑屏幕上。然后,操作者决定是否系统正确地在个图像中检测到茎。
2.3.4.专家的重复性
在确定视觉系统在测量大小和检测瑕疵的精度前,为了估计人工操作的精度和重复性要进行一个简单的试验,这是目前商业分级厂房的的参考。由于苹果的形状更加不规则所以被用于这些实验。桃子和柑橘更加类似球形,因而更容易被视觉系统分辨大小。
在第一个实验中,40个周长63和86毫米之间的苹果被随机挑选。每个苹果的大小被专家用卡钳测量了两次。两个测量进行了比较并且通过平均误差来计算精度。
为了估计检测瑕疵时人工操作的重复性,另一个检测是:48个苹果被机器分类后被选定,其中24个列为有缺陷的,其他24个为无缺陷。接着,三位专家人工的将他们归入同样的两类。15分钟后,他们重新归类该苹果。两次分类之间的相似性和异同被记录。
2.3.5视觉系统的在线重复性
在线测试,为了检查机器在商业条件下工作的重复性,使用了1247个金冠苹果,大小在64和92毫米之间。果实在西班牙标准为基础上被分为三类,根据其尺寸和外部污点。测试包括水果通过传递机,盒装水果,根据相应的类别。各自的箱反复通过该系统,并且对在分类中产生的变化进行观察并计数。(图四.图像分割流程)
图像分割
像素分割
缓冲
3.结果与讨论
3.1.评价分割程序
表一给出了桔子,苹果和桃子的图像像素分割性能,指出一种和剩余其他种类分开的最佳分离背景(100%),使更好的估计质心和水果的大小。
大多数像素分割程序中出现的错误是由于孤立的或小群的像素,这些主要位于相邻区域的边界。这些误差可以检测和纠正,如果每个分割区域的特征得到计算,因为这些群由于面积小常被分割为忽略不顾的区域。
3.2干检测
该系统检测茎的性能被进行了测量,使用了93个橘子,95个苹果和140个桃子的图像,而大多数图像都是在线获取的。实验表明,桔子的图像中有五幅茎未检测出来,而在另外两幅中,瘀伤和茎的检测发生了混淆。对于桃子,73个图像中有一幅茎没有检测出来,尽管其中79图像中有11幅没有茎,所以有误测。在苹果中,87个图像中有两个茎没有检测出来,然而,却被误测为三分之十三。对于剩下的三个水果的图像,茎被正确的检测和定位(见表2)。茎的不同颜色或形状和水果果型,能引起茎检测的结果不同。不过,在茎和瘀伤之间有一点混淆,大多数的混淆错误是由于在没有茎的水果中将瘀伤检测为了茎。
3.3.在线性能和可重复性
专家们在两次独立的实验中测量同一个苹果的尺寸的平均精度为0.6毫米,呈现了约0.8%的相对误差。但是,考虑到水果正确的大小作为六个测量的平均值(每
个专家两个有效测量),平均精度1.4毫米(1.9%的相对误差)。这些数字可能与视觉系统最大期望精度有关,该精度不会超过专家的精度,只是测量的参考。因此,一个1mm的误差课容许,当分析系统在线结果的重复性时。
当专家按分类中所述的尺寸种类进行水果分类时,他们表现出平均94%的可重复性。视觉系统的可重复性由最小尺寸水果的89%变化到极端大的水果的100%,平均为93%(见表3)。考虑到标准允许的10%的误判,其结果可以被视为良好。一个错误的来源是由于大多数苹果为72-74和79-82毫米,而74毫米被选为大小之间的临界尺寸。
专家们估计果皮上的损害程度时的重复性介于85%和90%,平均为88%(见表4)。由于该系统被专家编程和培训,从理论上说,它的性能受到了专家们的重复性的限制。因此,视觉系统重复性的最大期望值约88%。表5显示,该系统在线进行外观缺陷检测时,有86%重复性。这些错误是由于在预测质量时三个因素被考虑了:最长的缺陷,受损面积和褐色化区。如果只有其中一个估计参数变化,品质变化从一个传递到另外,果实将被归类在不同的类别。这一事实特别影响了类型一,那里的重复性被认为是较低的,因为这个类别只包括损坏程度极低的水果,并有因颜色浅而被认为是果皮缺陷。指出这点很重要,即这种类型的实验结果很大程度上依赖于果实大小分布及水果上污点的颜色和大小。
至于该系统使用所述硬件配置检查水果所用的时间,图像采集和分析所需的时间小于300毫秒,比最初的要求1s的时间要低。如果采用更新更快的计算机,并且提高算法来让图像的获取和处理重叠,这个时间可减少至低于50毫秒。
4.结论
分割方法对在线处理来说是快速和恰当的,但是却极大地取决于被检查对象的颜色。出于这个原因,系统需要经常由专门操作人员调试。机器视觉系统表现出良好的结果在定位桔子,桃子,苹果的茎干时和探测它们大多数时,很少和面部污点混淆。损坏的区域在苹果中能正确地检测到,但该算法在橙子和桃子应用时需要更广泛地进行测试。为了检测没有正确被区分出来的缺陷,还需要做进一步的工作,未能检测出来的原因主要是因为它的颜色浅,类似于完整果皮颜色的检验。在线操作的尺寸重复性介于91和95%,有一个93%的平均值。该机器的重复性在在线检测外部缺陷时约为86%,主要受第一类中取得的的那些结果影响。将这些结果和人类估测的大小和皮肤的损伤程度的平均重复性,分别为94和88%,进行比较,并且考虑到决策算法也同样被人工操作者训练和测试,由此我们认为结果可以接受的。实验结果表明将小缺陷或脱色区域认为是缺陷,取决于每位专家的主观标准。出于
这个原因,机器的性能是由每个盒子的整体内容的估计测量,而不是单独考察成果作为机分类结果,被所有的专家认为是正确的。
5.致谢
这项研究由ESPRIT项目的9230(综合处理系统,检验和包装的水果和蔬菜)获得了欧洲委员会一部分赞助资金。
参考文献
Aleixos N; Blasco J; Navarr!on F; Molt!o E (2002). Multispectralinspection of citrus in real-time using machine vision anddigital signal processors. Computers and Electronics in Agriculture, 33(2),
121–137
Blasco J; Molt!o E (2002). Identification of defects in citrus using multispectral imaging. International Conference on Agricultural Engineering, AgEng 02, Budapest, Hungary. EurAgEng Paper No.
02-AE-031
Brodie J R; Hansen A C; Reid J F (1994). Size assessment of stacked logs via the Hough Transform. Transactions of the ASAE, 37(1), 303–310
Cerruto E; Failla S; Schillaci G (1996). Identification of blemishes on oranges. International Conference on Agricultural Engineering, AgEng 96, Madrid, Spain. EurAgEng Paper No. 96-F-017 Dobrzanski B; Rybczynski R (2002). Colour change of apple as a result of storage, shelf-life,and bruising. International Agrophysics, 16, 261–268
Freeman H (1961). On the encoding of arbitrary geometric configurations. IRE Transactions of Electronic Computers. EC-10, pp 260–268
Hahn F (2002). Multispectral prediction of unripe tomatoes.Biosystems Engineering, 81(2), 147–155, doi:10.1006/bioe.2001.0035
Harrel R C (1991). Processing of colour images with Bayesian discriminate analysis. International Seminar on Use of Machine Vision Systems for the Agricultural and Bio-Industries,
Montpellier,France, pp 11–20
Leemans V; Magein H; Destain M F (1999). Defects segmentation on ‘Golden Delicious’ apples using colour vision and Bayesian Method. Computers and Electronics in Agriculture, 23, 43–53
Leemans V; Magein H; Destain M F (2002). On-line fruit grading according to their external quality using machine vision. Biosystems Engineering 83(4), 397–404 doi:10.1006/bioe.2002.0131 Lefebvre M; Zimmerman T; Baur C; Gugerli P; Pun T (1994).Potato operation: automatic detection of potato diseases.Proceedings of SPIE, 2345, 2–9
MAPA (1992). Normas de calidad para frutas y hortalizas.[Quality Standards for Fruits and Vegetables]. Ministerio de Agricultura, Pesca y Alimentaci!on. ISBN: 84-7479-920-1
Miller B K; Delwiche M J (1989). A color vision system for peach grading. Transactions of the ASAE, 34(4), 1484–1490
Molt!o E; Blasco J; Steinmetz V; BourelyA; Navarr!on F;Perotto G (1997). SHIVA: A robotics solution for automatic handling, inspection and packing of fruit and vegetables.Robotics and automated machinery for bio-productions,BIO-ROBOTICS 97, Gand!?a, Valencia, Spain, pp
65–70.ISBN:ISBN: 84-8498-659-4
Molt!o E; Blasco J; Steinmetz V; BourelyA; Navarr!on F;Perotto G (1998). Multi-sensor Inspection and robotic packing of fruit. AgEng 98. Oslo, Denmark. EurAgEng Paper No. 98-F-030
Peirs, A; Scheerlinck N; De Baerdemaeker J; Nicolai B M (2002). Quality determination of apple fruits with a hyperspectral imaging system. AgEng 02. Budapest, Hungary.EurAgEng Paper No.
02-PH -028
Penman DW(2002). Determination of stem and calyx location on apples using automatic visual inspection. Computers and Electronics in Agriculture, 33(2002), 7–18
Rehkugler G E; Throop J A (1986). Apple sorting with machine vision. Transactions of the ASAE,
29(5), 1388–1397
Ruiz L A; Molt!o E; Juste F; Pl!a F; Valiente R (1996). Location and characterization of the
stem–calyx area on oranges by computer vision. Journal of Agricultural Engineering Research, 64, 165–172
Sarkar N; Wolfe R R (1985). Feature extraction techniques for sorting tomatoes by computer vision. Transactions of the ASAE, 28(3), 970–979
Singh N; Delwiche M J; Johnson R S (1993). Image analysis methods for real-time color grading of stonefruit. Computers and Electronics in Agriculture, 9, 71–84
Singh N; Delwiche M J; Johnson R S; Thompson J (1992).Peach maturity grading with color computer vision. ASAE Paper No. 92-3029
Tao Y; Morrow C T; Heinemann P H; Sommer J H (1990).Automated machine vision inspection of potatoes. ASAE Paper No. 90-3531
机器视觉系统设计五大难点 机器视觉系统的组成 机器视觉系统是指用计算机来实现人的视觉功能,也就是用计算机来实现对客观的三维世界的识别。按现在的理解,人类视觉系统的感受部分是视网膜,它是一个三维采样系统。三维物体的可见部分投影到网膜上,人们按照投影到视网膜上的二维的像来对该物体进行三维理解。所谓三维理解是指对被观察对象的形状、尺寸、离开观察点的距离、质地和运动特征(方向和速度)等的理解。 机器视觉系统的输入装置可以是摄像机、转鼓等,它们都把三维的影像作为输入源,即输入计算机的就是三维管观世界的二维投影。如果把三维客观世界到二维投影像看作是一种正变换的话,则机器视觉系统所要做的是从这种二维投影图像到三维客观世界的逆变换,也就是根据这种二维投影图像去重建三维的客观世界。 机器视觉系统主要由三部分组成:图像的获取、图像的处理和分析、输出或显示。 将近80%的工业视觉系统主要用在检测方面,包括用于提高生产效率、控制生产过程中的产品质量、采集产品数据等。产品的分类和选择也集成于检测功能中。下面通过一个用于生产线上的单摄像机视觉系统,说明系统的组成及功能。 视觉系统检测生产线上的产品,决定产品是否符合质量要求,并根据结果,产生相应的信号输入上位机。图像获取设备包括光源、摄像机等;图像处理设备包括相应的软件和硬件系统;输出设备是与制造过程相连的有关系统,包括过程控制器和报警装置等。数据传输到计算机,进行分析和产品控制,若发现不合格品,则报警器告警,并将其排除出生产线。机器视觉的结果是CAQ系统的质量信息来源,也可以和CIMS其它系统集成。 图像的获取 图像的获取实际上是将被测物体的可视化图像和内在特征转换成能被计算机处理的一系列数据,它主要由三部分组成: *照明
摘要 人脸识别技术(FRT)是当今模式识别和人工智能领域的一个重要研究方向。虽然人脸识别的研究已有很长的历史,各种人脸识别的技术也很多,但由于人脸属于复杂模式而且容易受表情、肤色和衣着的影响,目前还没有一种人脸识别技术是公认快速有效的.本文主要讨论了人脸识别技术的一些常用方法,对现有的人脸检测与定位、人脸特征提取、人脸识别的方法进行分析和讨论,最后对人脸识别未来的发展和应用做了展望。 关键字:人脸识别,特征定位,特征提取
ABSTRACT Nowadays the face recognition technology (FRT) is a hot issue in the field of pattern recognition and artificial intelligence.Although this research already has a long history and many different recognition methods are proposed,there is still no effective method with low cost an d high precision.Human face is a complex pattern an d is easily affected by the expression,complexion and clothes.In this paper,some general research are discussed,including methods of face detection and location,features abstraction,and face recognition.Then we analyze and forecast the face recognition’s application and its prospects. Keywords: Face Recognition Technology, Face location,Features abstraction
第一章机器视觉系统构成与关键技术 1、机器视觉系统一般由哪几部分组成?机器视觉系统应用的核心目标是什么?主要的分 成几部分实现? 用机器来延伸或代替人眼对事物做测量、定位和判断的装置。组成:光源、场景、摄像机、图像卡、计算机。用机器来延伸或代替人眼对事物做测量、定位和判断。三部分:图像的获取、图像的处理和分析、输出或显示。 2、图像是什么?有那些方法可以得到图像? 图像是人对视觉感知的物质再现。光学设备获取或人为创作。 3、采样和量化是什么含义? 数字化坐标值称为取样,数字化幅度值称为量化。采样指空间上或时域上连续的图像(模拟图像)变换成离散采样点(像素)集合的操作;量化指把采样后所得的各像素的灰度值从模拟量到离散量的转换。采样和量化实现了图像的数字化。 4、图像的灰度变换是什么含义?请阐述图像反色算法原理? 灰度变换指根据某种目标条件按照一定变换关系逐点改变原图像中每一个像素灰度值,从而改善画质,使图像的显示效果更加清晰的方法。对于彩色图像的R、G、B各彩色分量取反。 第二章数字图像处理技术基础 1、对人类而言,颜色是什么?一幅彩色图像使用RGB色彩空间是如何定义的?24位真彩 色,有多少种颜色? 对人类而言,在人类的可见光范围内,人眼对不同波长或频率的光的主观感知称为颜色。 一幅图像的每个像素点由24位编码的RGB 值表示:使用三个8位无符号整数(0 到255)表示红色、绿色和蓝色的强度。256*256*256=16,777,216种颜色。 2、红、绿、蓝三种颜色为互补色,光照在物体上,物体只反射与本身颜色相同的色光而吸 收互补色的光。一束白光照到绿色物体上,人类看到绿色是因为? 该物体吸收了其他颜色的可见光,而主要反射绿光,所以看到绿色。 3、成像系统的动态范围是什么含义? 动态范围最早是信号系统的概念,一个信号系统的动态范围被定义成最大不失真电平和噪声电平的差。而在实际用途中,多用对数和比值来表示一个信号系统的动态范围,比如在音频工程中,一个放大器的动态范围可以表示为: D = lg(Power_max / Power_min)×20; 对于一个底片扫描仪,动态范围是扫描仪能记录原稿的灰度调范围。即原稿最暗点的密度(Dmax)和最亮处密度值(Dmin)的差值。 我们已经知道对于一个胶片的密度公式为D = lg(Io/I)。那么假设有一张胶片,扫描仪向其投射了1000单位的光,最后在共有96%的光通过胶片的明亮(银盐较薄)部分,而在胶片的较厚的部分只通过了大约4%的光。那么前者的密度为: Dmin=lg(1000/960)= 0.02; 后者的密度为: Dmax=lg(1000/40)= 1.40 那么我们说动态范围为:D=Dmax-Dmin=1.40-0.02=1.38。
机器视觉系统模块的原理分析及设计 一、概述 视觉技术是近几十年来发展的一门新兴技术。机器视觉可以代替人类的视觉从事检验、目标跟踪、机器人导向等方面的工作,特别是在那些需要重复、迅速的从图象中获取精确信息的场合。尽管在目前硬件和软件技术条件下,机器视觉功能还处于初级水平,但其潜在的应用价值引起了世界各国的高度重视,发达国家如美国、日本、德国、法国等都投入了大量的人力物力进行研究,近年来已经在机器视觉的某些方面获得了突破性的进展,机器视觉在车辆安全技术、自动化技术等应用中也越来越显示出其重要价值。本文根据最新的CMOS 图像采集芯片设计了一种通用的视觉系统模块,经过编制不同的图像处理、模式识别算法程序本模块可以应用到足球机器人,无人车辆等各种场合。 二、设计原理 系统原理框图如图1所示。 系统包含5个主要芯片:图像采集芯片OV7620,高速微处理器SH4,大规模可编程阵列FPGA,和串口通讯控制芯片MAX232。FPGA内部编程设立两个双口RAM,产生图像传感器所需的点频,行场同步等信号,以及控制双口RAM的存储时序。SH4负责对OV7620通过I2C进行配置,读取双口RAM的图像数据,进行处理,并通过串口实现图像资料的上传或控制步进电机等其他设备。 三、图像采集模块 系统模块以CMOS图像传感器OV7620为核心,还包括一个聚光镜头和其他一些辅助
元器件比如27MHZ的晶振,电阻电容等。 COMS图像传感器是近几年发展较快的新型图像传感器,由于采用了相同COMS技术,因此可以将像素阵列与外围支持电路集成在同一块芯片上,是一个完整的图像系统(Camera on Chip)。本系统采用的是Ommnvision公司推出的一块CMOS彩色图像传感器OV7620,分辨率为640x480。它能工作在逐行扫描方式下,也能工作在隔行扫描方式下。它不仅能输出彩色图像,也可用作黑白图像传感器。这块芯片支持的图像输出格式有很多种: 1)YCrCb4:2:2 16 bit/8 bit格式;2)ZV端口输出格式;3)RGB原始数据16 bit/8 bit; 4)CCIR601/CCIR656格式。其功能包括有对比度、亮度、饱和度、白平衡及自动曝光、同步信号位置及极性输出,帧速率和输出格式等都可以通过I2C 总线进行编程配置片内寄存器控制。 聚光镜头选用桑来斯公司生产的DSL103镜头。此镜头体积小,适合嵌入式视觉传感器的应用场合。 四、FPGA接口模块 FPGA采用Xilinx公司的XC2S100,这款芯片内部集成了10000个逻辑门。接口程序采用VHDL(Very High Speed Integrated Circuit Hardware Description Language)书写。为了提高数据的传输速率,在XC2S100 内部分配了2个双口RAM缓冲区,其大小为127KB,每个双口RAM存储1行的图像数据。两组双口RAM进行奇偶行计数器进行切换。当一行存储完毕后,立即向SH4传生一个读取该行数据的中断的申请信号。FPGA内部结构如图2所示。 这里主要问题在于FPGA内部的双口RAM读写操作共用同一数据总线和地址总线,当同时进行读写操作的时候就会产生时序问题导致写入或读出的数据错误。在这两个过程中为了防止数据和地址总线冲突,在FPGA内部设计了一个中央总线仲裁器。根据公共数据传输的先后顺序,中央仲裁器先接受图像传感器的总线请求,当图像存储到RAM之中后,中央仲裁器才响应单片机系统的读信号请求。
编号 本科生毕业设计 基于机器视觉的表面缺陷检测系统设计 Surface defect detection system design based on machine vision 学生姓名 专业电子信息工程 学号 指导教师 学院电子信息工程学院 二〇一三年六月
毕业设计(论文)原创承诺书 1.本人承诺:所呈交的毕业设计(论文)《基于机器视觉的表面缺陷检测系统设计》,是认真学习理解学校的《长春理工大学本科毕业设计(论文)工作条例》后,在教师的指导下,保质保量独立地完成了任务书中规定容,不弄虚作假,不抄袭别人的工作内容。 2.本人在毕业设计(论文)中引用他人的观点和研究成果,均在文中加以注释或以参考文献形式列出,对本文的研究工作做出重要贡献的个人和集体均已在文中注明。 3.在毕业设计(论文)中对侵犯任何方面知识产权的行为,由本人承担相应的法律责任。 4.本人完全了解学校关于保存、使用毕业设计(论文)的规定,即:按照学校要求提交论文和相关材料的印刷本和电子版本;同意学校保留毕业设计(论文)的复印件和电子版本,允许被查阅和借阅;学校可以采用影印、缩印或其他复制手段保存毕业设计(论文),可以公布其中的全部或部分内容。 以上承诺的法律结果将完全由本人承担! 作者签名:年月日
中文摘要 为了不断提高产品质量和生产效率,金属工件表面缺陷在线自动检测技术在生产过程中显得日益重要。针对金属工件表面的多种缺陷,本文设计了一套基于机器视觉能够实现对金属工件表面缺陷进行实时在线、无损伤的自动检测系统。该系统采用面阵CCD和多通道图像采集卡作为图像采集部分,提高了检测系统的速度并降低了对CCD的性能要求,使系统在现有的条件下比较容易实现实时在线检测;采用自动选取图像分割阈值,根据实际应用的阈值把工件信息从图像中提取出来并扫描工件图像中的信息,实现了系统的自动测量;根据扫描得到的工件信息去除掉工件边缘的光圈,利用自动选取的阈值对金属工件表面的图像进行二值化分割,从而实现各种缺陷的自动提取及识别。 关键词:机器视觉表面缺陷CCD 图像处理缺陷检测
机器视觉在自动化生产中的应用 如今,自动化技术在我国发展迅猛,人们对于机器视觉的认识更加深刻,对于它的看法也发生了很大的转变。机器视觉系统提高了生产的自动化程度,让不适合人工作业的危险工作环境变成了可能,让大批量、持续生产变成了现实,大大提高了生产效率和产品精度。快速获取信息并自动处理的性能,也同时为工业生产的信息集成提供了方便。随着机器视觉技术成熟与发展,我们不难发现其应用范围越加的广泛,根据这些领域,我们大致可以概括出机器视觉的五大典型应用,这五大典型应用也基本可以概括出机器视觉技术在工业生产中能够起到的作用。 一、图像识别应用 图像识别,是利用机器视觉对图像进行处理、分析和理解,以识别各种不同模式的目标和对象。图像识别在机器视觉工业领域中最典型的应用就是二维码的识别了,二维码就是我们平时常见的条形码中最为普遍的一种。将大量的数据信息存储在这小小的二维码中,通过条码对产品进行跟踪管理。通过机器视觉系统,可以方便的对各种材质表面的条码进行识别读取,大大提高了现代化生产的效率。 二、图像检测应用 检测是机器视觉工业领域最主要的应用之一,几乎所有产品都需要检测,而人工检测存在着较多的弊端,人工检测准确性低,长时间工作的话,准确性更是无法保证,而且检测速度慢,容易影响整个生产过程的效率。因此,机器视觉在图像检测的应用方面也非常的广泛,例如:硬币边缘字符的检测。2000年10月新发行的第五套人民币中,壹圆硬币的侧边增强了防伪功能,鉴于生产过程的严格控制要求,在造币的最后一道工序上安装了视觉检测系统。另外,其还可应用于印刷过程中的套色定位以及较色检查、包装过程中的饮料瓶盖的印刷质量检查,产品包装上的条码和字符识别,玻璃瓶的缺陷检测等。其中,机器视觉系统对玻璃瓶的缺陷检测,也包括了药用玻璃瓶范畴,也就是说机器视觉也涉及到了医药领域,其主要检测包括尺寸检测、瓶身外观缺陷检测、瓶肩部缺陷检测、瓶口检测等。 三、视觉定位应用 视觉定位要求机器视觉系统能够快速准确的找到被测零件并确认其位置。在半导体封装领域,设备需要根据机器视觉取得的芯片位置信息调整拾取头,准确拾取芯片并进行绑定,这就是视觉定位在机器视觉工业领域最基本的应用。 四、物体测量应用 机器视觉工业应用最大的特点就是其非接触测量技术,同样具有高精度和高速度的性能,但非接触无磨损,消除了接触测量可能造成的二次损伤隐患。常见的测量应用包括,齿轮,接插件,汽车零部件,IC元件管脚,麻花钻,罗定螺纹检测等。 五、物体分拣应用 实际上,物体分拣应用是建立在识别、检测之后一个环节,通过机器视觉系统将图像进行处理,实现分拣。在机器视觉工业应用中常用于食品分拣、零件表面瑕疵自动分拣、棉花纤维分拣等。
机器视觉光源的照明方式例举 我们知道,在机器视觉检测系统中,好的打光方式可以让我们更准确地捕捉物体特征,提高物体与背景的对比度。那么本章,维视图像为您分享一下机器视觉光源的照明方式及应用特点。 角度照明 特点及应用:在一定工作距离下,光束集中、亮度高、均匀性好、照射面积相对较小。常用于液晶校正、塑胶容器检查、工件螺孔定位、标签检查、管脚检查、集成电路印字检查等。适用光源:30、45、60、75等角度环光。 垂直照明
特点及应用:照射面积大、光照均匀性好、适用于较大面积照明。可用于基底和线路板定位、晶片部件检查等。 适用光源:0角度环光、条型光源、面光源。 低角度照明 特点及应用:对表面凹凸表现力强。适用于晶片或玻璃基片上的伤痕检查。 适用光源:90度环光。
背光照明 特点及应用:发光面是一个漫射面,均匀性好。可用于镜面反射材料,如晶片或玻璃基底上的伤痕检测;LCD检测;微小电子元件尺寸、形状,靶标测试。 适用光源:背光源、平行背光源。 多角度照明 特点及应用:RGB三种不同颜色不同角度光照,可以实现焊点的三维信息的提取。适用于组装机板的焊锡部份、球形或半圆形物体、其它奇怪形状物体、接脚头。
适用光源:AOI光源。 碗状光照明 特点及应用:360度底部发光,通过碗状内壁发射,形成球形均匀光照。用于检测曲面的金属表面文字和缺陷。 适用光源:球积分光源,通常也叫圆顶光、漫反射光源。 同轴光照明
特点及应用:类似于平行光的应用,光源前面带漫反射板,形成二次光源,光线主要趋于平行。用于半导体、PCB板、以及金属零件的表面成像检测,微小元件的外形、尺寸测量。 适用光源:同轴光源,平行同轴光源。 以上是常用机器视觉光源的照明方式,此外,还有许多其他的照明方式或组合的用法,在此不再一一赘述。如有相关需求和问题,欢迎与维视图像取得联系,我们拥有AFT全系列视觉光源,可为您提供最合适的照明方案。
嵌入式机器视觉系统设计 熊 超 田小芳 陆起涌 (复旦大学电子工程系 上海 200433) 摘要 机器视觉系统是智能机器人的一个重要标志,也是近年来的一个研究热点,现有研究成果在系统复杂度、价格和性能之间很难达到平衡。针对此问题,设计了一个CM O S摄像头为图像采集设备、DM CU为核心处理器的嵌入式机器视觉系统,并实现了实时双目测距。该系统简单、实时性好。 关键词 嵌入式系统 DM CU 机器视觉 双目测距 The Design of Embedded Machine Vision System Xiong Chao Tian Xiaofang Lu Qiyo ng (E.E.D ep ar tment,F udan U niv er sity,Shanghai200433,China) Abstract M achine vision is an act ive research area in recent years,which is an import ant symbol of intelligent robot,but t he present research product ion has not f ound a balance among the system complexit y,cost and per-formance.T o solve the problem,a new embedded machine vision system is proposed,which t akes t he CM OS sense as the image acquisit ion unit and DM CU as cent ral processor,and real-time depth measurement is realized. T he system is simple and st able,and has a good perf ormance in real-time operation. Key words Embedded syst em DM CU M achine vision Binocular dept h measurement 1 引 言 机器视觉系统是智能机器人的一个重要标志,其模拟了人的感知功能,具有探测范围宽、目标信息完整等优势,因此越来越受到人们的关注。其中,机器视觉测量障碍物距离是近年来的研究热点,并取得了一定的效果[1~3]。但这些视觉测距系统往往比较复杂、价格高,或者实时性差。在此设计了一个以CM OS摄像模块为图像采集设备、DM CU为核心处理器的嵌入式机器视觉系统,并实现了双目视觉实时测距。该系统集成度高、功耗低、实时性好,还有丰富的外围接口,可以广泛应用于智能机器人导航、目标定位等领域。 2 嵌入式系统设计 系统采用的摄像模块为台湾原相公司的CM OS 图像传感器PAS109B,工作电压2.4~3.6V,分辨率164×124,像素大小7.25 m×7.25 m,图像帧率最高60fps(frame per second),支持I2C接口。处理器采用台湾俊亿公司提供的DM CU处理器KBD0001B。DM-CU是为了适应现代便携设备发展而出现的一种全新体系结构,整合了DSP高效的运算能力和M CU强大的控制能力。K BD0001B字长16位,内部有RO M 32kW,有两种RA M:XRA M(16kW)和YRA M (8kW),可在一个时钟周期内分别从这两个RA M中得到两个操作数。K BD0001B运算速度最高可达25M IPS,采用了4级流水线结构,每条指令执行时间均为一个时钟周期。K BD0001B提供48个通用I/O接口,支持SPI、I2C、U A RT、PWM,内嵌了LCD控制器。 这里设计的机器视觉系统以K BD0001B为核心处理器,CM OS摄像模块为图像采集设备,大大降低该系统的复杂度。将该系统安装于一个移动小车上,通过双目视觉的方法测量障碍物的距离,实现了小车自主行驶和避障,如图1所示。 嵌入式机器视觉系统框图如图2所示。 为实时地测量障碍物距离,系统利用外极线约束[4]重整图像,这样每次只需分别从两图像传感器中 第26卷第8期增刊 仪 器 仪 表 学 报 2005年8月
毕业设计(论文)课题基于机器视觉的路面裂缝检测 专业年级电子信息工程2009级 学号 0962610107 姓名马卉 指导教师张卓 评阅人 二0一三年六月 物联网工程学院
河海大学 本科毕业设计(论文)任务书 (理工科类) Ⅰ、毕业设计(论文)题目: 基于机器视觉的路面裂缝检测方法研究与实现 Ⅱ、毕业设计(论文)工作内容(从综合运用知识、研究方案的设计、研究方法和手段的运用、应用文献资料、数据分析处理、图纸质量、技术或观点创新等方面详细说明): 裂缝是最常见的路面损坏,在路面裂缝演变成坑槽之前进行修补,可以大大节约路面的维护成本。与传统的人工检测方式相比,视觉检测效率高、自动化程度和安全性更强,本课题拟对基于视觉的路面裂缝检测方法进行研究,工作内容主要包括: 1.了解路面裂缝检测方法研究现状。 2.了解并掌握基于图像的表面破损对象检测方法。 3.了解并掌握matlab仿真工具编程方法。 4.进行路面裂缝图像的预处理、边缘提取和检测仿真设计。 5.给出论文英文摘要、专业英文资料翻译。 6.要求用WORD 排版、打印毕业论文。 Ⅲ、进度安排: (1)2012年11月―2013年1月:查阅资料,英文翻译 (2)2013年2月―2013年3月:熟悉课题背景,进行相关资料收集 (3)2013年3月―2013年4月:熟悉路面裂缝检测的图像处理过程和方法(4)2013年4月―2013年5月:检测方法的仿真与分析 (5)2013年5月―2013年6月:系统完善及准备撰写论文、答辩 Ⅳ、主要参考资料:
1.皱勤,低信噪比路面裂缝增强与提取方法研究【D】,武汉大学,2012年 2冈萨雷斯著,数字图像处理【M】,电子工业出版社,2007年 3.冈萨雷斯著,数字图像处理(MATLAB版)【M】,电子工业出版社,2007年 4.马常霞等,自然环境下路面裂缝的识别【J】工程图学学报,2011年 指导教师:,年月日 学生姓名:,专业年级: 系负责人审核意见(从选题是否符合专业培养目标、是否结合科研或工程实际、综合训练程度、内容难度及工作量等方面加以审核): 系负责人签字:,年月日
河北工业大学 院系:河北工业大学机械工程学院 班级:机研155班 姓名:翟云飞 学号: 201531204037 题目:机器视觉技术及其应用
目录 1.机器视觉的发展现状 2.机器视觉系统组成 2.1机器视觉系统的工作原理 3.机器视觉的应用 3.1基于机器视觉的FPC嵌入式检测系统检测系统 3.2基于机器视觉的柔性制造岛在线零件识别系统 3.3基于机器视觉的PCB光板缺陷检测技术 3.4新兴行业 4.机器视觉发展趋势 5.中国机器视觉产业的发展现状 5.1、随着产业化的发展对机器视觉的需求将呈上升趋势 5.2、统一开放的标准是机器视觉发展的原动力 5.3、基于嵌入式的产品将取代板卡式产品 5.4、标准化、一体化解决方案也将是机器视觉的必经之路 6.参考文献
1.中国机器视觉的发展趋势 近年来,机器视觉已经发展成为光电子的一个应用分支,广泛应用于微电子、PCB生产、自动驾驶、印刷、科学研究和军事等领域。机器视觉在中国的蓬勃发展,使从事机器视觉的公司和人员大量涌现。首先概述了机器视觉技术的基本原理并分析了机器视觉系统的构建;接着论述了机器视觉技术的当前主要应用领域与情况;最后分析了现阶段机器视觉技术存在的问题。 2.机器视觉系统组成及其工作原理 简言之,机器视觉就是用机器代替人眼来做测量和判断。机器视觉系统是指通过机器视觉产品(即图像摄取装置,分CMOS和CCD两种)将被摄取目标转换成图像信号,传送给专用的图像处理系统,根据像素分布和亮度、颜色等信息,转变成数字化信号;图像系统对这些信号进行各种运算来抽取目标的特征,进而根据判别的结果来控制现场的设备动作。 从原理上机器视觉系统主要由三部分组成:图像的采集、图像的处理和分析、输出或显示。—个典型的机器视觉系统应该包括光源、光学系统、图像捕捉系统、图像数字化模块、数字图像处理模块、智能判断决策模块和机械控制执行模块,如图1所示。
机器视觉在医疗器械行业的应用 摘要一次性注射针的外观缺陷是影响产品质量的主要因素。为了实现对注射针的外观缺陷检测自动化,本文研究了用西门子机器视觉[1]技术结合西门子自动化[2]设备在线检测注射针的外观缺陷并自动剔除不合格产品的方法。在实际生产过程的运用中,注射针检测系统得到了多家医疗器械厂商的好评。 关键词一次性注射针缺陷检测西门子机器视觉自动化 Abstract The defect on the appearance of the one-off injector pin is the main influencing factor to it’s quality. To realize defect inspection automatically for the defect on the appearance of the one-off injector pin, some defect inspecting methods for the one-off injector pin by SIMATIC machine vision combine with SIMATIC automatic equipment are studied in this article. In actual project, the equipment of Hang zhou Huafeng automatic company that inspects the appearance of the one-off injector pin obtained good effect from many medical instrument manufacturers. Key Words one-off injector pin, defect inspection, SIMATIC machine vision, automation 1 引言 随着医疗水平和医疗器械的不断提高和更新,一次性注射针以其方便、卫生的特点深受用户的喜爱,其需求量也迅速增大,而针头外观的好坏直接影响到一次性注射针的质量。所以为了减少不合格品的数量,需要增加检测工序。手工外观检验和产品标记昂贵和不可靠。同时又意味着不近人情的单调工作。这里,自动化机器视觉系统提供了解决这些问题的方案。 2 一次性注射针的缺陷 一次性注射针可以分为针座和针头两个部分。针座的缺陷对产品的质量影响可以不计。而针头就存在着两种缺陷情况:首先针头在制作过程中针尖部位可能会产生毛刺;其次针头在自动装配过程中可能会产生倒插现象(针尖部位被插入针座)。影响针头的几个缺陷为:针尖毛刺、倒插。其中倒插不仅会对产品的质量产生直接的影响,而且严重的会危害到人的
机器视觉检测 一、概念 视觉检测是指通过机器视觉产品(即图像摄取装置,分 CMOS 和CCD 两种)将被摄取目标转换成图像信号,传送给专用的图像处理系统,根据像素分布和亮度、颜色等信息,转变成数字化信号;图像系统对这些信号进行各种运算来抽取目标的特征,进而根据判别的结果来控制现场的设备动作。 机器视觉检测的特点是提高生产的柔性和自动化程度。 2、典型结构 五大块:照明、镜头、相机、图像采集卡、软件 1.照明 照明是影响机器视觉系统输入的重要因素,它直接影响输入数据的质量和应用效果。目前没有通用的照明设备,具体应用场景选择相应的照明装置。照射方法可分为: 分类具体说明优点 背向照明被测物放在光源和摄像机之 间能获得高对比度的图像 前向照明光源和摄像机位于被测物的 同侧 便于安装 结构光将光栅或线光源等投射到被 测物上,根据它们产生的畸 变,解调出被测物的三维信 息 频闪光照明将高频率的光脉冲照射到物
体上,摄像机拍摄要求与光 源同步 2.镜头 镜头的选择应注意以下几点:焦距、目标高度、影像高度、放大倍数、影响至目标的距离、中心点/节点、畸变。 3.相机 按照不同标准可分为:标准分辨率数字相机和模拟相机等。 要根据不同的实际应用场合选不同的相机和高分辨率相机:线扫描CCD 和面阵CCD;单色相机和彩色相机。 为优化捕捉到的图像,需要对光圈、对比度和快门速度进行调整。 4.图像采集卡 图像采集卡是图像采集部分和图像处理部分的接口。将图像信号采集到电脑中,以数据文件的形式保存在硬盘上。通过它,可以把摄像机拍摄的视频信号从摄像带上转存到计算机中。 5.软件 视觉检测系统使用软件处理图像。软件采用算法工具帮助分析图像。视觉检测解决方案使用此类工具组合来完成所需要的检测。是视觉检测的核心部分,最终形成缺陷的判断并能向后续执行机构发出指令。常用的包括,搜索工具,边界工具,特征分析工具,过程工具,视觉打印工具等。 3、关键——光源的选择 1.光源选型基本要素: 对比度机器视觉应用的照明的最重要的任务就是使需要被观察的特征与需要被忽略的图像特征之间产生最大的对比度,从而易于特
机器视觉系统设计五大难点 内容来源网络,由“深圳机械展(11万㎡,1100多家展商,超10万观众)”收集整理! 更多cnc加工中心、车铣磨钻床、线切割、数控刀具工具、工业机器人、非标自动化、数字化无人工厂、精密测量、数控系统、3D打印、激光切割、钣金冲压折弯、精密零件加工等展示,就在深圳机械展. 机器视觉系统的组成 机器视觉系统是指用计算机来实现人的视觉功能,也就是用计算机来实现对客观的三维世界的识别。按现在的理解,人类视觉系统的感受部分是视网膜,它是一个三维采样系统。三维物体的可见部分投影到网膜上,人们按照投影到视网膜上的二维的像来对该物体进行三维理解。所谓三维理解是指对被观察对象的形状、尺寸、离开观察点的距离、质地和运动特征(方向和速度)等的理解。 机器视觉系统的输入装置可以是摄像机、转鼓等,它们都把三维的影像作为输入源,即输入计算机的就是三维管观世界的二维投影。如果把三维客观世界到二维投影像看作是一种正变换的话,则机器视觉系统所要做的是从这种二维投影图像到三维客观世界的逆变换,也就是根据这种二维投影图像去重建三维的客观世界。 机器视觉系统主要由三部分组成:图像的获取、图像的处理和分析、输出或显示。 近80%的工业视觉系统主要用在检测方面,包括用于提高生产效率、控制生产过程中的产品质量、采集产品数据等。产品的分类和选择也集成于检测功能中。下面通过一个用于生产线上的单摄像机视觉系统,说明系统的组成及功能。 视觉系统检测生产线上的产品,决定产品是否符合质量要求,并根据结果,产生相应的信号输入上位机。图像获取设备包括光源、摄像机等;图像处理设备包括相应的
软件和硬件系统;输出设备是与制造过程相连的有关系统,包括过程控制器和报警装置等。数据传输到计算机,进行分析和产品控制,若发现不合格品,则报警器告警,并将其排除出生产线。机器视觉的结果是CAQ系统的质量信息来源,也可以和CIMS 其它系统集成。 图像的获取 图像的获取实际上是将被测物体的可视化图像和内在特征转换成能被计算机处理的一系列数据,它主要由三部分组成: *照明 *图像聚焦形成 *图像确定和形成摄像机输出信号 1、照明 照明和影响机器视觉系统输入的重要因素,因为它直接影响输入数据的质量和至少30%的应用效果。由于没有通用的机器视觉照明设备,所以针对每个特定的应用实例,要选择相应的照明装置,以达到最佳效果。 过去,许多工业用的机器视觉系统用可见光作为光源,这主要是因为可见光容易获得,价格低,并且便于操作。常用的几种可见光源是白帜灯、日光灯、水银灯和钠光灯。但是,这些光源的一个最大缺点是光能不能保持稳定。以日光灯为例,在使用的第一个100小时内,光能将下降15%,随着使用时间的增加,光能将不断下降。因此,如何使光能在一定的程度上保持稳定,是实用化过程中急需要解决的问题。 另一个方面,环境光将改变这些光源照射到物体上的总光能,使输出的图像数据存在噪声,一般采用加防护屏的方法,减少环境光的影响。
图像处理在智能车路径识别中的应用 摘要 机器视觉技术在智能车中得到了广泛的应用,这项技术在智能车的路径识别、障碍物判断中起着重要作用。基于此,依据飞思卡尔小车的硬件架构,研究机器视觉技术应用于飞思卡尔小车。飞思卡尔智能车处理器采用了MC9S12XS128芯片,路况采集使用的是数字摄像头OV7620。 由于飞思卡尔智能车是是一款竞速小车,因此图像采集和处理要协调准确性和快速性,需要找到其中的最优控制。因此本设计主要需要完成的任务是:怎样用摄像头准确的采集每一场的图像,然后怎样进行二值化处理;以及怎样对图像进行去噪处理;最后也就是本设计的难点也是设计的核心,怎样对小车的轨迹进行补线。 本设计的先进性,在众多的图像处理技术中找到了适合飞思卡尔智能车的图像处理方法。充分发挥了摄像头的有点。经过小车的实际测试以及相关的MATLAB 仿真,最终相关设计内容都基本满足要求。小车的稳定性和快速性得到显著提高。 关键词:OV7620,视频采集,图像处理,二值化
The Application of Image Processing in the Recognition of Intelligent Vehicle Path ABSTRACT CameraMachine vision technology in the smart car in a wide range of applications, the technology identified in the path of the smart car, and plays an important role in the obstacles to judge. Based on this, based on the architecture of the Freescale car, machine vision technology used in the Freescale car. Freescale smart car the processor MC9S12XS128 chip traffic collected using a digital camera OV7620. Freescale's Smart car is a racing car, so the image acquisition and processing to coordinate the accuracy and fast, you need to find the optimal control. This design need to complete the task: how to use the camera to accurately capture every image, and then how to binarization processing; and how to image denoising; last is the difficulty of this design is the design of the core, how to fill line on the trajectory of the car. The advanced nature of the design found in many image processing techniques of image processing methods for Freescale Smart Car. Give full play to the camera a bit. The actual testing of the car and MATLAB simulation, the final design content can basically meet the requirements. The car's stability and fast to get improved significantly. KEY WORDS:OV7620,Video Capture,PictureProcessing,Binarization
为何要使用光源 机器视觉系统的关键是图象的数据采集和处理,图象自身的成像品质对整体视觉系统极其关键。光学光源则是影响机器视觉系统成像品质的关键要素,许多光源和照明效果对视觉辨别影响是非常大的。 按照适当的光源照明设计,使图象的目标信息与背景信息取得最佳的分离处理,能够大幅度降低图象处理算法分割、分辨的难度系数,与此同时提升系统的定位、测量精度,让系统的可靠性和综合型能取得提升。相反,假如光源设计不合理,会造成在图象处理算法设计和成像系统设计中事半功倍。因而,光源及光学系统的设计的成功与失败是决定系统成功与失败的主要是要素。 在机器视觉系统中,光源的作用: 1,照明目标,提升目标亮度; 2,形成最有利于图象处理的成像效果; 3,解决坏境光的影响,确保图象的稳定性能; 4,用以測量的工貝和参照。 光源的归类 在机器视觉里的光源主要指的是人造的光源,是人为的将多种形式的能量(热能、电能、化学能)转换成光辐射的器件。
人工光源通常可分成下面几大类:热辐射光源、气体放 电光源、固体发光光源、激光器。 发光二极管(LED)光源做为一类新式的半导体发光材料,在寿命和稳定性能上有着十分明显的优势。 下面以目前被普遍使用的LED光源重点详细介绍。 #条型光源 条型光源特性: >>LED均成直线或其组合排列,照度高,光源指向性强,照明效果也符合直线型规律或其叠加。 >>采用特殊光学透镜,有效的改变LED照射角度。 >>采用标准模具成型、拼接安裝,结构稳定 >>可选漫射版导光,光线均匀分布。 >>尺寸、颜色能够按照具体要求定制。 应用场合:可用以电子元件分辨与缺陷检测;文字内容、外形分辨等; #环形光源 环形光源分成垂直照射环形光源,角度照射环形光源, 低角度环形光源,无影环形光源。 垂直照射环形光源的特性: >>用高亮度LED高密度安裝,提拱红、绿、蓝、白、红外、紫外等颜色;
毕业设计题目:机器视觉检测台自动控制系统设计 姓名: 学号: 学院:机电学院 专业:机械工程及自动化 指导教师: 协助指导教师: 201 年月日
摘要 为了提高机器视觉检测系统中摄像头的定位精度和实现摄像头的全自动调节,本文结合实际工业生产需求详细叙述了怎样进行机械机构设计、硬件选型与硬件接线以及精度计算设计等工作。其中硬件设计包含怎么选择合适的控制器、控制工艺、驱动设备、上位监控软件及网络通信方式等机器视觉检测台自动控制系统中的重要组成部分;精度计算设计主是指通过计算步进电机步距角与其高速脉冲频率的关系来实现摄像头移动位置的精确定位。 关键词:自动检测系统、PLC、步进电机
Abstract Precision detection technology as the key to promoting industrial development and the efficiency of detection to some extent reflects the development of the manufacturing sector; for machine vision inspection system has the advantage of high precision, on-line, real-time, non-contact, etc., with industrial production field of automation requirements continue to increase, machine vision inspection applications in various fields more widely, such as assembly line parts recognition positioning, size and location of the measurement of mechanical components, parts flaw detection, mechanical parts assembly Appearance inspection and product testing completely. In order to improve the positioning accuracy of the machine vision inspection system in the camera and the camera's automatic adjustment realization, this paper actual industrial production requirements described in detail how mechanical structure design, hardware selection and the hardware wiring and accuracy of the calculation and design work. The hardware design includes how to choose the right controller to control the process, drives, PC and network monitoring software, communications and other machine vision inspection station automatic control system, an important part; precision computing design of the main means by calculating the stepper motor step Relationship angle from its high-speed pulse frequency to achieve precise positioning camera movement position. Keywords: Automatically Detecting System, PLC, Stepper Motor.