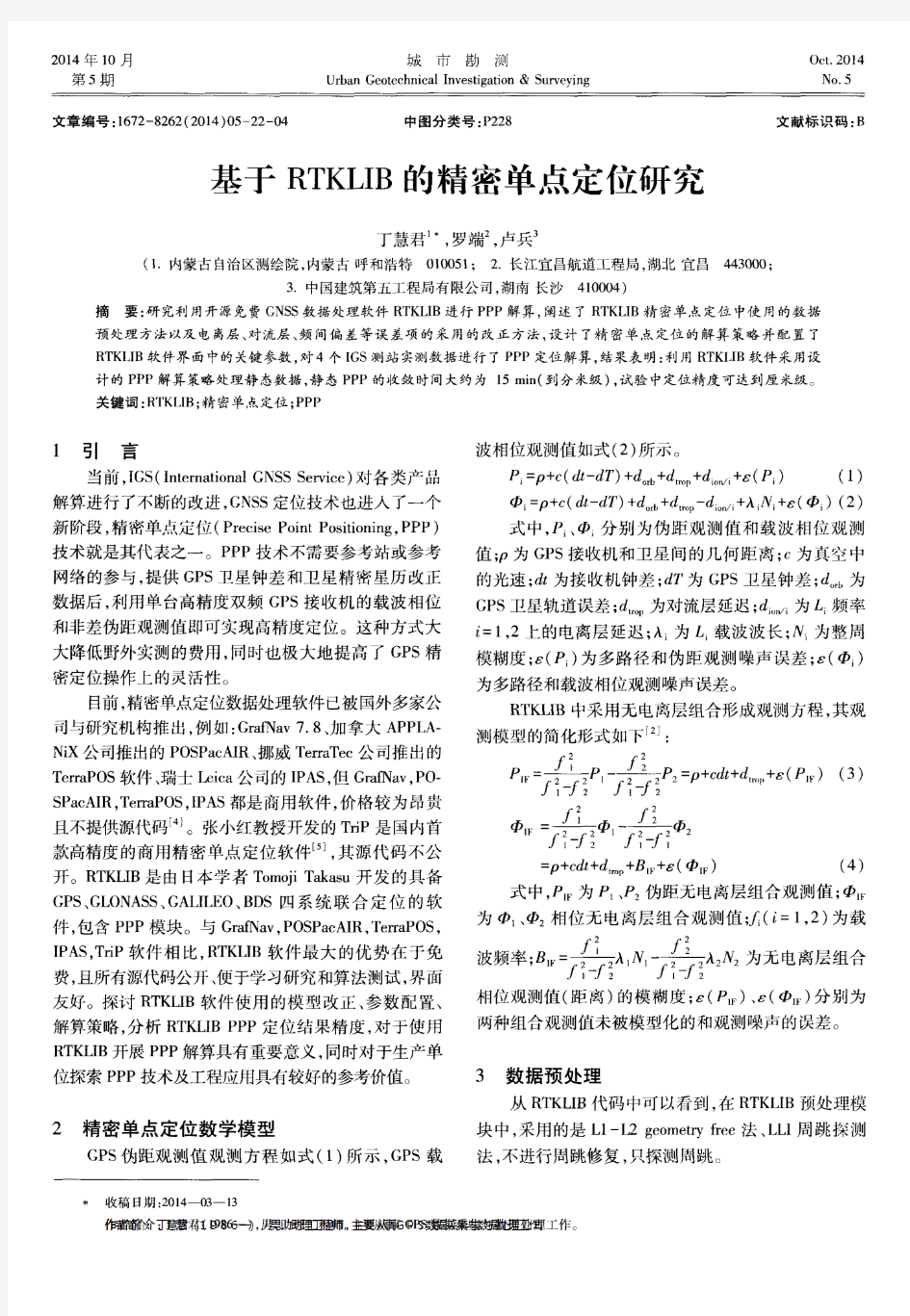
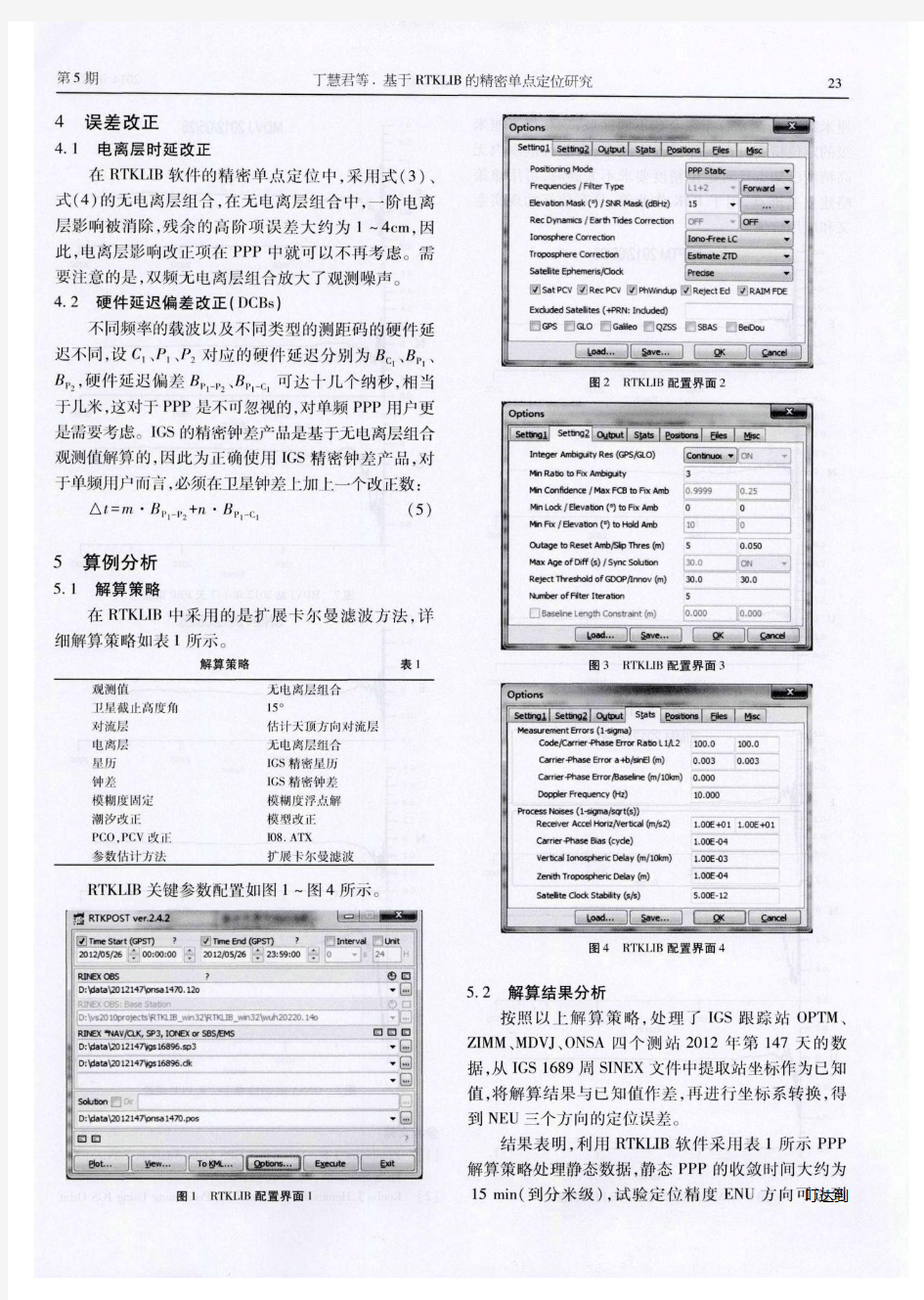
GNSS精密单点定位基本原理及应用 【摘要】文中详细介绍了GN SS精密单点定位技术的基本原理及在各领域中的应用前景,供国土测绘界同行参考。 【关键词】GN SS;精密单点定位;大地测量 1.前言 精密单点定位是指利用全球若干地面跟踪站的GNSS观测数据计算出的精密卫星轨道和卫星钟差,对单台GNSS接收机所采集的相位和伪距观测值进行定位解算,利用这种预报的GNSS卫星的精密星历或事后的精密星历作为已知坐标起算数据;同时利用某种方式得到的精密卫星钟差来替代用户GNSS定位观测值方程中的卫星钟差参数;用户利用单台GNSS双频双码接收机的观测数据在数千万平方公里乃至全球范围内的任意位置都可以2- 4dm级的精度,进行实时动态定位或2- 4cm级的精度进行较快速的静态定位,精密单点定位技术是实现全球精密实时动态定位与导航的关键技术,也是GNSS 定位方面的前沿研究方向。 2.精密单点定位基本原理 单点定位是利用卫星星历和一台接收机确定待定点在地固坐标系中绝对位置的方法,其优点是一台接收机单独定位,观测组织和实施方便,数据处理简单。缺点是精度主要受系统性偏差(卫星轨道、卫星钟差、大气传播延迟等)的影响,定位精度低。应用领域:低精度导航、资源普查、军事等。对于单点定位的几何描述,保持GNSS卫星钟同GNSS接收机钟同步;GNSS卫星和接收机同时产生相同的信号;采用相关技术获得信号传播时间;GNSS卫星钟和GNSS接收机钟难以保持严格同步,用相关技术获得的信号传播时间含有卫星钟和接收机钟同步误差的影响。单点定位虽然是只需要一台接收机即可,但是单点定位的结果受卫星星历误差、卫星钟差以及卫星信号传播过程中的大气延迟误差的影响较为显著,故定位精度一般较差。 精密单点定位为技术针对单点定位中的影响,采用了精密星历和精密卫星钟差、高精度的载波相位观测值以及较严密的数学模型的技术,如用户利用单台GNSS 双频双码接收机的观测数据在数千万平方公里乃至全球范围内,点位平面位置精度可达1- 3cm,高程精度可达2- 4cm,实时定位的精度可达分米级。 利用上述推导的观测模型,即可采用卡尔曼滤波的方法或最小二乘法进行非差精密单点定位计算,在解算时,位置参数在静态情况下可以作为常未知数处理;在未发生周跳或修复周跳的情况下,整周未知数当作常数处理,在发生周跳的情况下,整周未知数当作一个新的常数参数进行处理;由于接收机钟较不稳定,且存在着明显的随机抖动,因此将接收机钟差参数当作白噪声处理;而对流层影响变化较为平缓,可以先利用Saastamonen或其他模型改正,再利用随机游走的方
实时精密单点定位(PPP)是可能通过实时卫星轨道和时钟校正的可用性广播星历,播放的实时校正(BCS)。实时BCS是目前在全球以及区域的参考帧。在这方面的贡献,PPP使用这些全球性和区域性BCS的性能分析1983北美基准(NAD83)。为当前区域NAD83 BC 方法确定的局限性和协调的差异导致了与传统方法相比,显示全球BC。虽然偏差所造成的不同的参考帧的使用被证明是亚厘米级,它也表明,他们可以通过PPP算法或区域BC方法改性降低或消除。分析了三种不同的变体进行PPP,单一频率的电离层的自由变体,双频电离层自由变体,和一个单一频率的电离层修正变异。 精密单点定位(PPP)是一个全球定位系统(GPS)处理非差伪距和载波相位测量从一个独立的GPS接收机的高精度计算分米或厘米在全世界遍地开花的位置定位方法(藏伯格等人。1997;2001 ovstedal库巴和荷鲁克斯;2002)。近年来,服务已经开发了允许高精度星历数据可实时用户(代码2006;库巴泰特里等人2003。2005烘烤2010)。这样的情况了,并将继续创造,PPP应用范围广(荷鲁克斯等人。2004、高2008;比斯纳)。这种服务的重要例子是实时(RT)的GPS卫星的轨道和时钟校正广播星历(Sohne等人。2008。这些RT 广播改正(BCS)用户提供精确的轨道和时钟校正所需的PPP。BCS在全球参考框架不仅可以(GRF)也在一组选定的区域参考框架(RRFS),如北美基准(NAD)1983(NAD83)(BKG 2010;Sohne 2010)。在这方面的贡献,这些NAD83区域BCS使用(微构件系统)的单和双频率PPP是第一时间分析及其与更传统的全球BCS的使用性能(GBC上将)的比较。 在微构件系统的理论基础是认为当处理独立的GPS数据,获得用户的位置的参考框架定义的参考系统,实现了卫星位置。因此,在文献中已GRF RRF卫星轨迹的转换是一个有用的替代GRF RRF的站坐标变换因为它有可能简化访问RRF允许用户在一个全局数据区域专门工作表明(克蕾默等人。2000;库巴2002;克蕾默2006;Schwarz 1989)。 本文的组织如下。能够评估作用的参考帧播放的PPP,NAD83简要描述和国际地球参考框架(ITRF),和他们的椭球坐标的差异,在随后的部分了。然后,GBC和红细胞的方法,单和双频率NAD83 PPP协议的分析和比较。目前的RBC 方法确定的局限性和协调的差异导致他们对GBC的方法示出。其次,它是如何修改PPP算法或红细胞的方法,这两种方法之间的一致性恢复。由于确定的PPP RBC方法的局限性是固有的作为一个结果,不同的参考帧的使用,这方面的贡献的结果是在更换NAD83 2018提供了一个新的几何数据,删除不同意ITRF计划的支持(NOAA 2008)。 对PPP的BCS是理解中的重要作用的正确使用的参考帧播放。因此,本节中的ITRF转换NAD83,其链接,这种改造在位置相关的椭球坐标的两帧之间的差异的影响作了简要的介绍。 北美基准1983 所采用的数据和参考在美国和加拿大的空间定位系统是NAD83。详细的介绍了它的定义,建立,和进化,读者可以参考施瓦茨(1989),斯奈和索勒(2000a,b),索勒和斯奈(2004),克雷默等人。(2000),与克雷默(2006)。NAD83首次实现的,这在很大程度上依赖卫星多普勒观测,由美国国家大地测量1986通过(NGS)。它被称为NAD83(1986)。自那时以来,NAD经历了又一个五实现在美国,最后一个是NAD83(cors96)。此实现,正是联系在一起的NAD83 ITRF框架,它是一个地心坐标系统的最佳实现(鲍彻和altamimi 1996)。为了这
简介 精密单点定位--precise point positioning(PPP) 所谓的精密单点定位指的是利用全球若干地面跟踪站的GPS 观测数据计算出的精密卫星轨道和卫星钟差, 对单台GPS 接收机所采集的相位和伪距观测值进行定位解算。利用这种预报的GPS 卫星的精密星历或事后的精密星历作为已知坐标起算数据; 同时利用某种方式得到的精密卫星钟差来替代用户GPS 定位观测值方程中的卫星钟差参数; 用户利用单台GPS 双频双码接收机的观测数据在数千万平方公里乃至全球范围内的任意位置都可以2- 4dm级的精度, 进行实时动态定位或2- 4cm级的精度进行较快速的静态定位, 精密单点定位技术 是实现全球精密实时动态定位与导航的关键技术,也是GPS 定位方面的前沿研究方向。 编辑本段精密单点定位基本原理 GPS 精密单点定位一般采用单台双频GPS 接收机, 利用IGS 提供的精密星历和卫星钟差,基于载波相位观测值进行的高精度定位。所解算出来的坐标和使用的IGS 精密星历的坐标框架即ITRF 框架系列一致, 而不是常用的WGS- 84 坐标系统下的坐标,因此IGS 精密星历与GPS 广播星历所对应的参考框架不同。 编辑本段密单点定位的主要误差及其改正模型 在精密单点定位中, 影响其定位结果的主要的误差包括:与卫星有关的误差(卫星钟差、卫星轨道误差、相对论效应);与接收机和测站有关的误差(接收机钟差、接收机天线相位误差、地球潮汐、地球自转等);与信号传播有关的误差(对流层延迟误差、电离层延迟误差和多路径效应)。由于精密单点定位没有使用双差分观测值, 所有很多的误差没有消除或削弱,所以必须组成各项误差估计方程来消除粗差。有两种方法来解决:a.对于可以精确模型化的误差,采用模型改正。b.对于不可以精确模型化的误差,加入参数估计或者使用组合观测值。如双频观测值组合,消除电离层延迟;不同类型观测值的组合,不但消除电离层延迟,也消除了卫星钟差、接收机钟差;不同类型的单频观测值之间的线性组合消除了伪距测量的噪声,当然观测时间要足够的长,才能保证精度。 什么是PPP(精密单点定位)? (2009-08-02 13:58:03) GPS从投入使用以来,其相对定位的定位方式发展得很快,从最先的码相对定位到现在的RTK,使GPS的定位精度不断升高。而绝对定位即单点定位发展得相对缓慢,传统的GPS 单点定位是利用测码伪距观测值以及由广播星历所提供的卫星轨道参数和卫星钟改正数进行的。其优点是数据采集和数据处理较为方便、自由、简单, 用户在任一时刻只需用一台GPS 接收机就能获得WGS284 坐标系中的三维坐标。但由于伪距观测值的精度一般为数分米至数米;用广播星历所求得的卫星位置的误差可达数米至数十米, 卫星钟改正数的误差为±20
BDS/GNSS实时精密单点定位算法研究与实现随着GNSS定位技术的不断发展,以及多导航定位系统并存时代的到来,多系统融合精密单点定位逐渐成为研究的重要问题。实时精密单点定位技术具有定位精度高、定位方便、不受基准站限制等优点,将成为未来高精度导航定位的重要手段。 多系统提供了更多的可见卫星数量及更优的卫星几何结构,有利于提高实时精密单点定位的定位的精度、可靠性及收敛时间。因此,本文通过对实时多系统精密单点定位的理论和方法进行研究,基于实时的轨道和钟差数据流,以及实时的多系统观测数据流,实现了支持GPS/BDS/GLONASS三系统组合定位的实时单频和双频精密单点定位。 本文的主要研究内容如下:(1)本文对伪距粗差的探测、钟跳的探测与修复方法、以及周跳探测的方法进行了详细的分析。首先对利用不同伪距间的差值进行伪距粗差探测的有效性进行了分析;然后根据不同的钟跳类型,对基于单个历元观测值的钟跳探测和修复方法进行了分析;最后,根据三频组合观测值的理论,优选了GPS和BDS三频无几何距离周跳探测组合,并根据实例,分析了利用优选的两组BDS线性组合系数进行无几何距离周跳探测的有效性。 (2)本文对不同系统和不同测站系统偏差值的特性进行了分析。结果表明:系统偏差收敛后的值在一天内保持相对稳定,且系统偏差值的大小表现出与测站相关的特性。 (3)本文利用德国联邦测绘局提供的实时SSR改正数,分析了三系统实时恢复的轨道和钟差的精度。同时分析了数据龄期和改正数中断对实时精密单点定位的影响,并给出相应的解决方案。
(4)根据实时多系统精密单点定位的理论,基于C++平台,编程实现了支持GPS/BDS/GLONASS三系统组合定位的实时单频和双频精密单点定位。并进行了双频静态模拟动态、单频静态模拟动态、车载动态试验,分析了软件的定位性能。
科 技 天 地45 INTELLIGENCE ··· ·····················浅谈GPS 精密单点定位技术 吉林省基础地理信息中心 刘振宇 摘 要:本文介绍了GPS 精密单点定位技术的概念、产生、主要原理、数学模型 等初步知识,扼要介绍了在应用中应解决的关键技术问题,并展望了该技术的实际应用前景。 关键词:GPS 精密单点定位技术 原理 应用 1 GPS 精密单点定位技术的产生 GPS 空间定位技术以其定位的高度灵活性和常规测量技术无法比拟的高精度成为现阶段常规大地测量的主要技术手段,彻底的改变了传统的野外测量模式,并且在可预见的一个时期内尚无一种技术手段可以代替。 GPS 空间定位技术同所有的新生事物一样,有着发生、发展、成熟的变化过程。随着我们对GPS 空间定位技术本质认识的不断深入,在理论与使用方法上也在不断的进行创新。从第一代的伪距定位、载波相位测量到第二代的实时动态定位、广域差分技术,直至目前第三代的网络实时动态定位、精密单点定位技术,GPS 空间定位技术留下了一条清晰的发展历程。第三代的网络实时动态定位、精密单点定位技术业已发展成熟,正处在面向实用推广的过程。 美国喷气推进实验室 (Jet Propulsion Laboratory,JPL)是美国国家航空和宇宙航行局(National Aeronautics and Space Administration,NASA)下属的一家科研机构,主要从事空间科学的研究。1997年以来JPL 的研究人员利用该机构研制的GPS 高精度定轨定位软件——GIPSY 的某些功能模块实现了精密单点定位,并发表了多篇文章。由此宣告了一种全新的GPS 定位模式的诞生。 2 GPS 精密单点定位技术的概念 所谓精密单点定位(Precise Point Positioning,PPP)是指利用GPS 卫星的事后精密星历、事后精密卫星钟差作为已知坐标起算数据,用户利用单台GPS 双频全波长接收机在全球范围内的任意位置进行高精度的空间定位。该技术是实现全球精密实时动态定位与导航的关键技术,也是GPS 定位方面的前沿研究方向。 3 GPS 精密单点定位技术的主要原理 在目前GPS 空间定位技术的各种手段中,除去精密单点定位外,所采用的数学模型均为差分模型。(对应的实现手段是相对定位方法,即要求在作业过程中必须有两台以上的GPS 接收机进行同步观测。)其主要原理是利用差分的方法来消除两个测站公共部分的系统误差,从而达到精确的相对定位。随着我们对GPS 技术本质认识的不断深入,对GPS 测量过程中产生的各种系统性误差有了更细致的了解,因此可以针对各种系统性误差分别建立起相对应的精确的数学模型对系统性误差进行描述、估计和处理,从而可以采用非差分的数学模型来替代差分数学模型来进行数据处理,并利用GPS 卫星的事后精密星历、事后精密卫星钟差作为已知坐标的起算数据,直接获得待定点的三维坐标。简而言之,所谓GPS 精密单点定位技术的实质就是采用经验的公式对GPS 测量过程中产生的系统性误差进行描述,并在数据处理过程中进行误差改正,从而获得精确的测量结果。 在GPS 精密单点定位技术中,利用事后卫星钟差估计值消去卫星钟差项,并且采用双频观测值消除了电离层影响,顾及以上各项则其观测值误差方程如下: p j j trop j j p i P i i t C i i v εδρδρ+?+?+=)()()()()( Φ Φ+Φ???++?+=ελλδρδρ)()()()()()(i i N i i t C i i v j j j trop j j 式中: j 为卫星号,i 为相应的观测历元,C 为真空中光速。 )(i t δ为接收机钟差,)(i j trop δρ为对流层延迟影响。p ε、Φε为多路径、观测噪声等未模型化的误差影响。 )(i P j 、)(i j Φ为相应卫星i 历元的消除了电离层影响 的组合观测值,而)(i v j p 、 )(i v j Φ 为其观测误差,λ为相应的波长。 )(i j ρ为信号发射时刻的卫星位置到信号接收时刻接收机位置之间的几何距离。 )(i N j 为消除了电离层影响的组合观测值的整周未知数。 这样精密单点定位的主要工作量即为将p ε、 Φε多路径、观测噪声等未模型化的误差影响采用精确的数学模型或经验的数学模型进行描述,在此就不具体展开讨论了。 待定参数为:[]T j nsat j zd N t z y x i X ),1()(==δρδ其中x、y、z 为三维位置参数、t δ接收机钟差参数、zd δρ对流层延迟参数、j N 为整周未知数参数。 利用上述观测模型,即可采用序贯最小二乘法或卡尔曼滤波的方法进行非差精密单点定位计算。
精密单点定位技术及其应用 摘要:GPS 精密单点定位技术是目前GPS 研究领域的热点之一。文中先简要介绍了精密单点定位的数学模型、数据处理总体思路。探讨了精密单点定位技术的定位原理及误差来源, 并比较了精密单点定位与RTK, 展望了精密单点定位技术在城市建设中的应用。 关键词:精密单点定位;解算过程;误差源;应用 1.前言 精密单点定位是利用全球若干地面跟踪站的GPS观测数据计算出的精密卫星轨道和卫星钟差, 对单台GPS 接收机所采集的相位和伪距观测值进行定位解算。利用这种预报的GPS 卫星的精密星历或事后的精密星历作为已知坐标起算数据;同时利用某种方式得到的精密卫星钟差来替代用户GPS 定位观测值方程中的卫星钟差参数;用户利用单台GPS双频双码接收机的观测数据在数千万平方公里乃至全球范围内的任意位置都可以2- 4dm级的精度, 进行实时动态定位或2- 4cm级的精度进行较快速的静态定位, 精密单点定位技术是实现全球精密实时动态定位与导航的关键技术,也是GPS 定位方面的前沿研究方向。 2 精密单点定位基本原理 GPS 精密单点定位一般采用单台双频GPS 接收机, 利用IGS 提供的精密星历和卫星钟差,基于载波相位观测值进行的高精度定位。所解算出来的坐标和使用的IGS 精密星历的坐标框架即ITRF 框架系列一致, 而不是常用的WGS- 84 坐标系统下的坐标,因此IGS 精密星历与GPS 广播星历所对应的参考框架不同。 2.1 ITRF 参考框架 ITRF 是国际协议地球参考系(ITRS)的具体体现,ITRF 的构成是基于VLBI、LLR、SLR、GPS 和DORIS 等空间大地测量技术和观测数据, 由IERS 中心局IERS CB 分析得到一组全球的站坐标和速度场。IERS 中心局每年将全球跟踪站的观测数据进行综合处理和分析, 得到一个ITRF 框架,并以IERS 年报和IERS 年报和 IERS 技术备忘录的形式发布。ITRF 的定义是通过对框架的定向、原点、尺度和框架时间演变基准的明确定义来实现。不同时期ITRF 框架之间的四个基准分量定义是不同的,存在很小的系统性的差异,当然这些差异可以通过7个参数表示。 2.2 精密单点定位数学模型
精密单点定位技术的相关理论及其应用 陆贤东,齐建伟 中国矿业大学环境与测绘学院,江苏徐州 (221008) E-mail: luxiandong2006@https://www.doczj.com/doc/b93865680.html, 摘要:本文主要从理论上系统阐述了精密单点定位技术的相关理论,对精密单点定位误差处理数学模型作了详细的分析,展望了精密单点定位技术的发展和应用。 关键词:精密单点定位;IGS;数学模型;误差分析 0. 引言 随着我国海洋战略的实施,海洋科研、海洋开发、海洋工程等海上活动日益增加,对定位精度的要求也呈现出多样化,如精密的海洋划界、精密海洋工程测量等,要求能够达到十几或几十厘米的定位精度,而采用伪距差分定位只能提供米级的定位精度,如果使用RTK功能,作 用距离又不能达到;对于这部分定位需求,现有的定位手段无法满足要求,需要寻求新的定位 方式或技术。本位系统的阐述了精密单点定位技术的由来和系统组成,对精密单点定位技术的原理及误差处理数学模型作以下详细分析。 1.精密单点定位技术的原理 精密单点定位技术(PPP-Precise Point Positioning)由美国喷气推进实验室( JPL ) 的Zumberge于1997年提出。20世纪90年代末,由于全球GPS跟踪站的数量急剧上升,全球GPS 数据处理工作量不断增加,计算时间呈指数上升[2]。为了解决这个问题,作为国际GPS服务组织( IGS)的一个数据分析中心, JPL提出了这一方法,用于非核心GPS站的数据处理。该技术的思路非常简单,在GPS定位中,主要的误差来源于三类,即轨道误差、卫星钟差和电离层延时。利用IGS提供的高精度的GPS精密卫星星历和卫星钟差,以及单台双频GPS接收机采集的载波相位观测值,采用非差模型进行精密单点定位。精密单点定位的优点在于在进行精密单点定位时,除能解算出测站坐标,同时解算出接收机钟差、卫星钟差、电离层和对流层延迟改正信息等参数,这些结果可以满足不同层次用户的需要(如研究授时、电离层、接收机钟差、卫星钟差及地球自转等)。 2.IGS的相关介绍 精密单点定位技术(PPP-Precise Point Positioning)指的是先利用全球若干IGS跟踪站的GPS观测数据计算出精密卫星轨道参数和卫星钟差,然后在此基础上对单台接收机的载波相位或伪距数据进行处理,得到一些相关参数,在相关领域进行应用。IGS由GPS卫星跟踪网、数据中心、分析中心、中央局、工作组。其中工作组包括低轨卫星研究工作组、GLONASS工作组、电离层工作组、对流层工作组和时频传递工作组。低轨卫星研究工作组研究利用IGS全球跟踪网进行低轨卫星(LEO)定轨、掩星技术等方面的研究; GLONASS 工作组综合利用GPS/GLONASS卫星数据,进行大地测量与地球动力学研究;电离层工作组是发展全球性和区域性的电离层延迟图。对流层工作组是发展全球性和区域性的对流层延迟图,为气象学服务;时频传递工作组是利用GPS时间共视技术(GPS Common View)进行高精度时间比对,维护协调世界时(UTC)。
精密单点定位PPP 精密单点定位(precise point positioning ,缩写PPP ),指的是利用全球若干地面跟踪站的GPS 观测数据计算出的精密卫星轨道和卫星钟差, 对单台GPS 接收机所采集的相位和伪距观测值进行定位解算。在卫星导航应用之中,GPS 作为定位的意义越来越重要,不论是军事上还是工程等方面上,导航定位的研究依然是一个不老的研究主题。精密单点定位更是导航定位中的一个很值得研究的问题。 PPP 根本上讲属于单点定位范畴,那么单点定位又是怎样进行测量定位的呢?单点定位是利用卫星星历和一台接收机确定待定点在地固坐标系中绝对位置的方法,其优点:一台接收机单独定位,观测组织和实施方便,数据处理简单;缺点:精度主要受系统性偏差(卫星轨道、卫星钟差、大气传播延迟等)的影响,定位精度低。应用领域:低精度导航、资源普查、军事等。对于单点定位的几何描述,三个站星距离,作三个球面三个球面两两相交于两点,如下图所示: 站星距离的测定:保持GPS 卫星钟同GPS 接收机钟同步;GPS 卫星和接收机同时产生相同的信号;采用相关技术获得信号传播时间;GPS 卫星钟和GPS 接收机钟难以保持严格同步,用相关技术获得的信号传播时间含有卫星钟和接收机钟同步误差的影响。单点定位虽然是只需要一台接收机即可,但是单点定位的结果受卫星星历误差、卫星钟差以及卫星信号传播过程中的大气延迟误差的影响较为显著,故定位精度一般较差。PPP 针对单点定位中的影响,采用了精密星历和精密卫星钟差、高精度的载波相位观测值以及较严密的数学模型的技术,如用户利用单台GPS 双频双码接收机的观测数据在数千万平方公里乃至全球范围内,点位平面位置精度可达1~3cm ,高程精度可达2~4cm ,实时定位的精度可达分米级。 精密单点定位的数学模型,对于伪距: (S R i i ion trop t t x V V c V c V ρ=--+?-?0()()()S R i i i i i t i ion i trop i i t V l dX m dY n dZ c V c V V V ρρ=---+?-?+---误差方程为:
实时精密单点定位研究综述 发表时间:2016-03-24T12:00:43.883Z 来源:《基层建设》2015年24期供稿作者:高乔肖建东胡慧娟[导读] 长安大学 GPS精密单点定位(PPP)是一种利用高精度的GPS卫星星历和卫星钟差以及双频载波相位观测值. 长安大学陕西西安 710054 摘要:GPS精密单点定位(PPP)是一种利用高精度的GPS卫星星历和卫星钟差以及双频载波相位观测值,并采用非差模型进行高精度单点定位的方法。实时精密单点定位技术(RT-PPP)已成为当前GNSS领域的研究热点,也将是目前乃至未来实时高精度动态定位的主要技术手段之一。本文对其从研究背景、国内外研究现状,以及发展前景等方面进行了综述。 关键词:GPS;实时精密单点定位;研究背景;发展现状;前景 1 研究背景 全球定位系统GPS(Global Positioning System)是美国从上世纪70年代开始研制,于1994年全面建成的新一代卫星导航定位系统。目前,GPS以全天候、高精度、自动亿、高效益等显著特点,诸多领域得到了广泛应用。GPS的出现,给测绘领域带来了一场深刻的技术革命。传统的GPS单点定位是指利用单台接收机的测码伪距及广播星历的卫星轨道参数和卫星钟差改正进行定位,因其较低的定位精度已不能满足精密导航、大地测量、变形监测、精密工程测量等的要求。 为了提高精度,出现了GPS相对定位,它是用两台以上接收机同步观测相同的GPS卫星,以确定基线端点的相对位置或基线向量。GPS相对定位通过组成差分观测值来消除接收机钟差、卫星钟差等公共钟差以及减弱对流层延迟、电流层延迟等相关性的影响,因此,它是目前GPS定位中精度最好的一种方法。 PPP技术作为一种最近十几年发展起来的一项GPS定位新技术,在低轨卫星精密定轨、高精度坐标框架维持、区域或全球性科学考察、航空动态测量和海洋测绘等方面具有不可估量的应用前景,目前己经成为GPS导航和定位界的研究热点。经过近十几年国内外学者的研究,精密单点定位的事后处理算法及应用已经比较成熟。与相对定位中的实时定位技术RTK相对应,在实时GPS卫星轨道和钟差产品的支持下,精密单点定位的数据处理可以在实时情况下进行,得到实时定位结果,称之为实时PPP技术。实时PPP定位技术与目前已有两种GPS实时定位服务系统(基于单基准站RTK技术系统和基于多基准站的CORS系统)相比具有以下显著优点: 1.系统服务覆盖区域大; 2.总投资和运营成本低。 2 国内外研究现状与进展 国际GPS服务组织IGS(International GPS Service)是国际大地测量协会IAG(International Association of Geodesy)于1993年创建的一个为GPS提供应用服务的国际组织。由于IGS能够提供精密的卫星星历和卫星钟差,因此,就使得单点定位无需差分而获得高精度成为可能。JPL的Zumberge等人在1997年就提出了利用双频接收机进行非差单点定位。NRCan(Natural Resources Canada)的Kouba和Herous(2000)首先详细地论述了利用双频接收机进行非差单点定位技术。JPL的Muellerschoen(2000)等人提出了全球实时精密单点定位技术。加拿大Calgary大学的Gao Y和Shen X(2001)也对此作了详细的论述,同时提出了一种新的观测模型。除了以上的学术研究机构外,几个大的商业公司对精密单点定位技术也非常关注并且进行了不同程度的研究,如NAVCOM公司的StarFire和Omnistar-HP系统就包含有精密单点定位的内容(Bisnath,2003)。 在国内方面,黄珹等人研究了采用GIPSY软件的精密单点定位方法解算区域基准网问题。武汉大学的时世榕博士对非差相位精密单点定位技术进行了深入研究,并利用自己提出的改进模型及自行研制的定位软件进行了试算。武汉大学的张小红副教授也对PPP作了深入的研究,并首次将PPP技术应用到航空测量和极地科学考查中,并编制了Trip解算软件。 从国内外研究成果的分析来看,目前研究的重点主要集中在PPP定位模型的建立、大气折射的影响分析、软件实现和PPP静态定位精度分析等方面,对于动态精密单点定位的精度研究还不够深入。与GPS相对定位技术不同,PPP技术由于采用非差观测值进行数据处理,破坏了相位模糊度的整周特性,这使得不能进行非差相位模糊度的固定。而相对定位技术由于采用站际星际二次差观测值,UPD在二次差过程中被消去,从而使得双差模糊度具有整数特性。因此,要使PPP能够达到工程上的实时定位要求,就必须开展加快PPP定位收敛速度的研究。 国际上众多学者尝试进行精密单点定位中相位模糊度固定,并取得了可喜的进展。上述各种精密单点定位整周模糊度固定方法大致可以分为两类:一类是估计破坏相位模糊度整数特性的硬件延迟非整周部分的方法,简称为FCB方法;另一类则是不显式估计硬件延迟非整周部分,而采用卫星钟差参数吸收这些硬件延迟,从而在定位计算中恢复了模糊度整数特性的方法,简称为IRC方法。Geng等人从理论推导和算例分析两个方面证明了这两种方法是等价的。为与相对定位模式中的实时动态定位RTK区别,GPS界将整周模糊度固定的实时精密单点定位称之为PPP-RTK。显然,整周模糊度固定的FCB方法和IRC方法均可用于PPP-RTK。 综上所述,当前实时精密单点定位技术得到了广泛的重视和飞速的发展,一方面是实时精密单点定位得到了广泛的应用,出现了多个成熟的商业系统;另一方面制约精密单点定位技术实时应用的模糊度固定技术取得了重大进展,发展了多种适用于PPP的整周模糊度固定方法。可以预见,实时精密单点定位技术将取得重大突破,高精度GPS定位模式将恢复到最初GPS系统设计者的单点绝对定位模式。 3 发展前景与趋势 由于其硬件构成简便、定位灵活方便、不受作用距离限制等优点,实时精密单点定位技术已经成为当前GNSS界的研究热点之一。和静态精密单点定位相比,动态精密单点定位在对流层延迟改正、多路径效应等误差改正方面更为复杂,在探测、修复周跳和整周模糊度的确定方面也更为困难。 但与静态定位相比,动态或实时定位的研究不多。由于将来在GIS数据采集、精密导航、科研考察等领域中需要用到精密的动态定位,GPS精密单点定位将会发挥更加重要的作用,动态或实时动态GPS精密单点定位则会更具有实用价质。此外,由于目前单频GPS接收机价格较双频接收机低很多,基于单频GPS精密单点定位也是值得研究的一个课题。
GPS精密单点定位 陈超 (20101001738 115103班) 摘要 GPS测量主要分为相对定位和绝对定位。我们在课堂上已经学习了差分GPS 测量(相对测量),通过双差消除或者削弱了卫星星历误差、电离层延迟、对流层延迟和接收机钟差,观测方程中只剩下了基线向量3个分量和整周模糊度N,这样模型简单了,精度也提高了。这对工程运用是很方便的,但是对我们全面学习GPS是不利的。单点定位就不同了,需要考虑各种模型,需要对各种误差进行改正,才能达到我们需要的精度要求。因此,研究精密单点定位,对我们全面深入的学习GPS是很有必要的。 基于此,我的GPS的结业课程报告题目选择了GPS精密单点定位。但是,这涉及的知识确实很多,每一个误差改正研究透彻都需要花很多精力与时间,在短时间内全面深刻的掌握是不可能的。所以,我有侧重的选择了几个方面的问题。 根据卫星星历以及一台GPS接收机的观测值来独立确定该接收机在地球坐标系中的绝对坐标的方法称为单点定位,也成绝对定位。单点定位的优点是只需要一台接收机即可独立定位,外业观测的组织和实施较为方便自由,数据处理也较为简单。 但是,单点定位的结果受卫星星历误差、卫星钟的钟误差(指进行卫星钟差改正后的残余误差)以及卫星信号的传播过程中大气延迟误差的影响较为显著,故定位精度一般较差。对于测绘类领域需要精确获得点位的空间坐标,传统单点定位的精定不足以达到,限制了在测量领域的广泛运用。 基于上面原因,近年来,出现了以精密星历和精密卫星钟差、高精度的载波相位观测值以及较为严密的数学模型为特征的精密单点定位技术(Precise Point Positioning,PPP)。GPS 非差相位精密单点定位是利用GPS 卫星精密星历及由一定方法确定的精密卫星钟差,以单台双频GPS 接收机采集的非差相位数据作为主要观测值来进行单点定位计算,其精度可达分米级甚至厘米级。由于它可利用单台接收机在全球范围内进行静态或动态独立作业,并且能直接得到高精度的ITRF 框架坐标,因此,它在区域高精度的坐标框架维持,区域或全球性的科学考察,高精度动态导航定位及低轨卫星的定轨等方面都具有不可限量的应用前景,是目前GPS 界研究的热点。 基于此,本文介绍精密单点定位原理与实现,主要内容如下: 1、比较单点定位与高精度GPS双差定位的共异性。 2、全面的介绍了国内外精密单点定位的研究现状。 3、详细的阐述了非差相位精密单点定位的观测模型、随机模型和各种误差改正模型。 关键词:精密单点定位国内外研究现状非差相位观测误差改正模型 1