第十章非线性系统
§10.1 与线性系统的差异
线性系统与非线性系统的不同之处在于:
1. 非线性系统的运动是由一个非线性微分方程控制的,但是很多非线性方程都不存在精确解。
2. 一个非线性系统可能不只一个平衡点,而平衡点可能是稳定的,也可能是不稳定的。
3. 非线性系统是否存在稳态运动取决于初始条件。
4.非线性系统的自由振动周期由初始条件决定,这就意味着自由振动的频率依赖于自由振动的振幅。
5. 非线性系统的共振出现在激发频率不同于系统的线性固有频率处,在一个三维非线性系统中,当激发频率为系统线性固有频率的1/3时,产生超频共振;当激发频率为系统线性固有频率近三倍时,就产生亚频共振。
6. 线性叠加原理不能用来分析受多频激励的非线性系统,共振的组合是对应于激发频率的近似组合。
7. 对应于固有频率的近似组合,在多自由度的连续系统中存在内共振。
8. 在非线性系统中,周期激励可能会引起非周期响应,由于一些特定的参数值,这种混沌运动出现在很多非线性系统中。
§10.1 定性分析
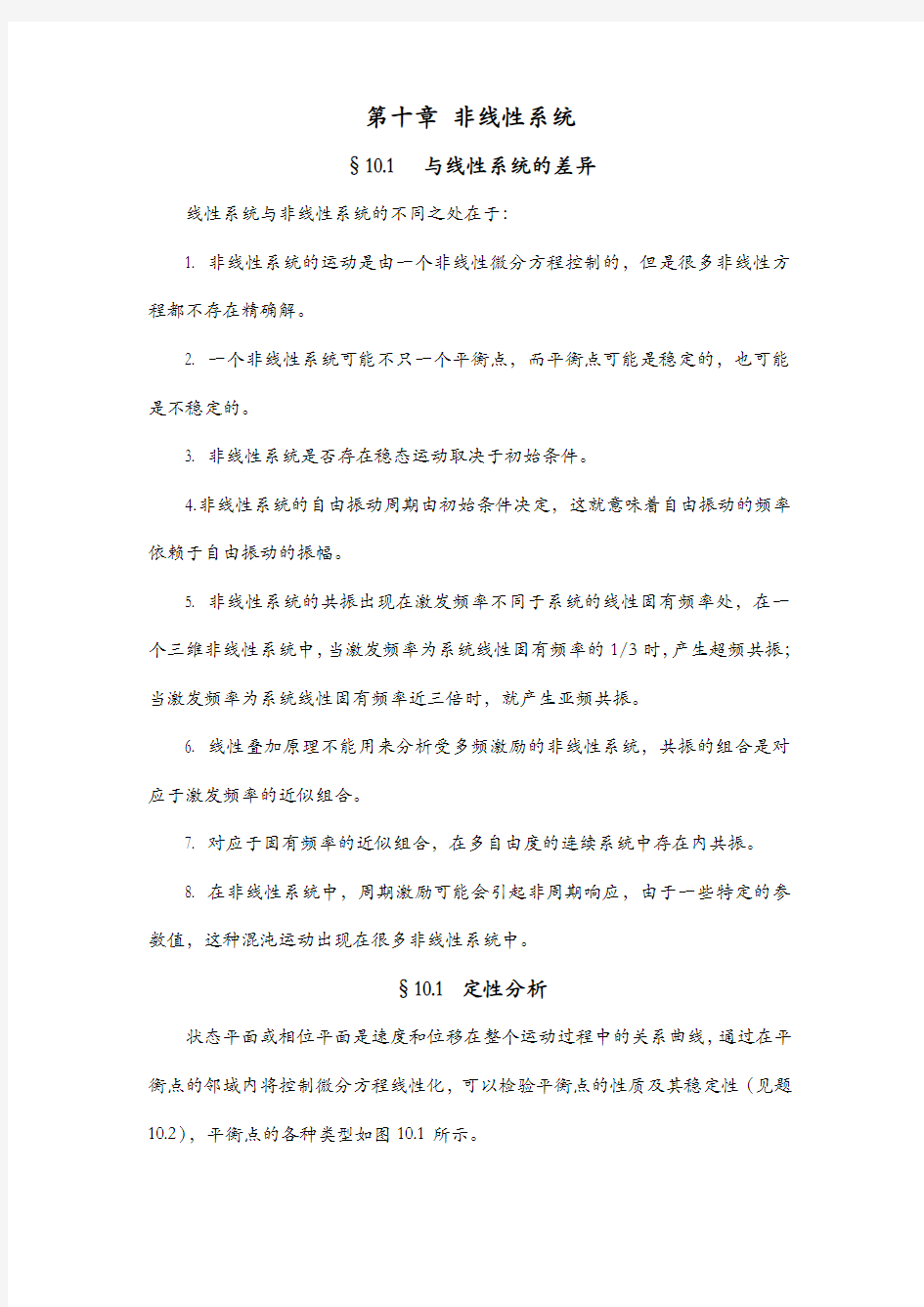
状态平面或相位平面是速度和位移在整个运动过程中的关系曲线,通过在平衡点的邻域内将控制微分方程线性化,可以检验平衡点的性质及其稳定性(见题10.2),平衡点的各种类型如图10.1所示。
§10.3 达芬方程
达芬方程
rt F sin 23=+++εχχχμχ
(10.1) 是一个无量纲方程。它作为一个模型可用于求解三维非线性系统。如果ε为正,则表示一个硬弹簧的响应;如果ε为负,则表示一个软弹簧系统的响应。一个系统自由振动的振幅关系由达芬方程决定,它可以用扰动方法近似表示为:
)(8
3
122εεωO A ++= (10.2)
其中ω是固有频率的无量纲化(对于线性系统ω=1),A 是振幅,分析共振附近达芬方程的受迫响应可以设
εσ+=1r (10.3)
则稳态振幅的定义方程就可近似表示为
22
22
2
]83[4F A A =??? ?
?
-+σμ (10.4)
方程(10.4)在图10.2中的关系曲线表示为0>ε时中枢曲线和跳跃现象,对于给定的σ值,方程(10.4)有三个正实解,因为2A 引起了三种可能的稳态运动,中间解是不稳定的,引起跳跃现象。
§10.4自激振动
自激振动是由系统运动而引起的振动,它是由非线性形式的阻尼引起的,这里的阻尼项在给定的运动范围内是负值,图10.3所示的动力系统表现的就是阻尼,而振幅却变化不大,范德波尔方程就是某些自激系统的一个模型,即:
0)1(2=+-+χχχμχ
(10.5) 图10.4所示的相平面就表示了范德波尔振子自由振动的一个极限环。
例 题
10.1 单摆运动的非线性方程的无量纲化形式为
0sin =+θθ
(i )推导定义运动相平面的广义方程;
(ii )求在1,0==θ
θ 条件下的轨线; (iii )单摆的最大摆角是多少? 解: (i )令2θν=,则
θ
ννθθννθθd d dt d d d dt d dt d ==== 从而微分方程就可以写成
0sin =+θθ
ν
ν
d d 对θ求积分,则得
C =-θνcos 2
12
其中C 是一个积分常数。
(ii )要求当0=θ时,1=ν,则2
1
-=C ,从而解出ν
1cos 2-=θν
(iii )当0=ν时,最大摆角 60=θ
10.2 令0χχ=代表非线性系统的平衡位置,取χχχ?+=0来分析在平衡点邻域内系统的运动。通过在平衡点处线性化微分方程,来确定平衡点的类型及其稳定性。
解:设控制微分方程的形式为:
0),(=+χχχ
f 若0χχ=代表一个平衡点,则0)0,(0=χf 。将χχχ?+=0代入微分方程,得:
0),(0=??++?χχχχ
f 用泰勒级数展开,得:
0)0,()0,()0,(000=++???+???++? χ
χχ
χχχχχ
f
f f 加上平衡条件并略去高阶项线性化得:
0=?+?+?χβχαχ
)0,(0χχα ??=
f ,)0,(0χχ
β??=f
方程的解可记为:
t t e C e C 2121λλχ+=?
其中1λ和2λ是方程022=++βλλ的解,平衡点的类型及其稳定性讨论如下: (1)若1λ或2λ其一有正实部,则从平衡点出发的扰动无限大,故解不稳定。 (2)若1λ和2λ都是正实数且同号,则平衡点为节点(稳定或不稳定。 (3)若错是实数且同号,则平衡点为鞍点(不稳定)。
(4)若1λ和2λ为共轭复数,则平衡点为焦点(稳定或不稳定)。 (5)若1λ和2λ都是纯虚数,则平衡点是中点。
10.3 确定摆动方程所有平衡点的类型及其稳定性。 解:单摆运动的非线性微分方程为:
0sin =+θθ
采用题10.2中的符号,得:
θθ
θsin ),(= f 且:,0sin 0)0,(00πθθθn f =→=→= ,2,1,0±±=n 现在,令θπθ?+=n ,并将其代入微分方程,得:
0)sin(=?++?θπθ
n 用泰勒级数展开,且保留线性项得:
0)cos(=?+?θπθ
n 0)1(=?-+?θθ
n 利用题10.2中的符号,则上述方程的广义解为:
t
n t
n e
C e
C 2)
1(2)
1()
1(2)
1(1-----+=?θ
2
)
1(1)
1(--=n λ,2
)
1(2)
1(---=n λ
因此,对于奇数n , 1λ和2λ都是实数且异号,这些平衡点就是鞍点;对于偶数n ,1λ和2λ都是纯虚数,这些平衡点就是中点。 10.4 摆动的相平面示意图。
解:根据题10.3 结论得到的相平面示意图如图10.5 所示。
10.5 质点在图10.6 所示的旋转抛物线上运动的微分方程为:
04)2()41(22222=+-++χχχωχ
χ p gp p 若10=ωrad/s ,求p 为何值是,平衡点0=χ是鞍点?
解:采用题10.2中的符号,得:
2
222222414412),(χ
χχχχωχχ p p p gp f +++-=注意到0=χ的确是一个平衡点,检验在其邻域内平面轨线的运动,令χχ?=,采用题10.2中的符号,得:
0)0,0(=??=
χ
α f
22)0,0(ωχ
β-=??=
gp f
从而相平面轨线在0=χ附近的微分方程为:
0)2(2=?-+?χωχ
gp 当22ω 122 10.5) 81.9(2)10 (-= m s rad p 从题10.6~题1.8,题10.11和10.12 都是指图10.7中的系统而言的。弹簧的立与位移的关系为: 331y k y k F -=,m N k 6 1101?=,m N k 123101?= 其中y 是从弹簧原长时量取的。 10.6 设?=y χ,其中y 是从未伸缩时的位移,且1/k mg =?,用方程(10.1)的形式写出图10.7中所示系统运动的微分方程,并求出ε,μ,F 和r . 解:对质量块应用牛顿定律,其微分方程为: t F y k y k y c y m ωsin 331=-++ (10.6) 线性化系统的固有频率为: s rad kg m N m k n 6.223201016 1 =?== ω 且 m m N s m kg k mg 46 2 1 1096.1101)81.9)(20(-?=?== ? 设t n ωτ=,则有: τ ωττd d dt d d d dt d n == 用无量纲化变量,改写方程(10.6)为: τωωτωτ ωn n n F x k x k d dx c d x d m sin 033312 222 =?-?+?+? τωω τωτ n n k F x k k x d dx m c d x d sin 1032132 2?=?-++ 方程(10.1)形式中的各量如下: 0384.0)1096.1(101101246 312 21 3-=???-=?-=-m m N m N k k ε 0112.0) 6.223)(20(2100 2=?==s rad kg m s N m c n ωμ 510.0) 81.9)(20(1002010===?= s N kg N mg F k F F 671.06.223150 == =s rad s rad r n ωω 10.7 确定图10.7中系统的平衡点的性质及其稳定性。 解:用题10.2中的符号,则: 32),(x x x x x f εμ++= 从而:ε ε1 ,00)0,(3-±=→+==x x x x f 注意到: 231,2x x f x f εμ+=??=?? 首先考虑平衡点0=x ,则: 021,2=?+?+?→==x x x μβμα i 999.00112.0122,1±-=-±-=μμλ 因为λ的值是实部共轭复数,所以平衡点0=x 是一个稳定的焦点。 由于ε是负值,系统还有两个平衡点ε/1-±=x ,在任一情况下: 415 .1,413.120222)1 (31222,1-=+±-==?-?+?-=-+==μμλμε μβμαx x x 因此这两个静平衡点是鞍点,且不稳定。 10.8 令0=μ,试求固有周期的积分表达式。 解:设初始条件为0=t 时,0,0==x x x 。当0=μ时自由振动的达芬方程为: 03=++x x x ε 定义x =ν,则:0=++x x dx d εν ν 对x 积分,得:C x x =++4224 2121ε ν 代入初始条件求得ν为:424 02 02 2x x x x ε ε ν--+±= 由于dt dx /=ν,则:4 24 02 02 2 x x x x dx dt ε ε - -+ ±= 1/4周期就是物块从初始条件返回(平衡位置)0=x 所用的时间。在这期间速度是负值,因此,从0x 到0积分,得: ? - -+ -=0 4 24 02 00 2 2 4x x x x x dx T ε ε 10.9 用线性扰动法求在F =0时达芬方程的二次近似解。 解:设: )()()(210∈++=O t x t x x ε (10.7) 将方程(10.7)代入不受力的达芬方程,得: 0)()(0)(3 3 011003101010=+++++=+++++++++εεεεεεO x x x x x x x x x x x 设系数是ε的方幂都趋于零,则得: )(sin )sin(033113011000φφ+-=+→-=++=→=+t A x x x x x t A x x x 根据三角恒等式,得: ) (3sin 32 )cos(83)] (3sin )sin(3[4 3 313 11φφφφ+-+=+-+-=+t A t t A x t t A x x 因此: )()](332 )cos(83[)sin()(33 3εφφεφO t SIN A t t A t A t x ++-+++= 10.10 由题10.9求得的解不是周期性的,应如何修正?为什么? 解:由题10.8可以知道非线性系统的固有周期是取决于初始条件的。在题10.9中的扰动解中没有给出这种依赖关系,真正的响应可以在相同周期的现行系统中 得到,要修正该解,需要引入依赖于振幅的时间量: )1(221++++= λεελωt 上述表达式可以在现行展开前引入,在这种情况下称之为Linstedt-Poincare 方法;也可以在将非周期的现行展开变成周期性之后引入,后者称之为重整化方法。在任一情况下,都可得到结论: . )(3sin 32 )sin(), 8 3 1(3 2+++-+=++-= φεφεωt A t A x A t 10.11 将图10.7所示系统的物块放置在距平衡点1.0mm 处释放,试求其合成运动的周期。 解:采用题10.6中的无量纲化方法,初始条件为: 0)0(,10.51096.1001.04 0==?= -x m m x 将初始条件代入由题10.10后得到的两项展开函数,并由题10.5 中得到的 0384.0-=ε,得: 28.50012.010.52 3sin 322sin )0(2 23 =→-=- == A A A A A x π εππ φ 无量纲频率为: 599.0)28.5)(0384.0(83 183122=-+=+=A εω 有量纲频率和周期分别为: s T s rad s rad n 074.09.113)6 .223(599.0=→==ω 10.12 用扰动方法来逼近10.7系统的受迫响应。 解:为了避免符号混淆,设εδ-=,由于阻尼是很小的,它经过非线性整理,最后得: 292.00384 .00112 .0=== →=δμξδξμ 则方程变为: t x x x x 671.0sin 510.0584.03=-++δδ 设线性扰动解为:)()()(10t x t x t x δ+= 代入微分方程,并令系数为δ的方幂都趋于零,得:] . 103.2sin 0655.0671.0sin 09.1671.0cos 662.0103.2sin )103.2(1200 .0671.0sin )671.0(1599.0671.0cos )671.0(1364.0)(,103.2sin 200.0671.0sin 599.0671.0cos 364.0671.0sin 799.0671.0cos 364.0584.0,6741.0sin 98.0671.0sin ) 671.0(1510 .0,671.0sin 510.022********* 000t t t t t t t x t t t t t x x x x t t x t x x ++-=---+-- =-+-=+-=+-=+=-= =+ 10.13 讨论采用何种定性工具以确定一个非线性系统的运动是否为混沌运动。 解:(a )对于混沌运动,相平面内的抛物线轨迹时不能被它自己重复的;(b )若在整个运动过程过程的频谱分析中有连续的频谱,则运动是混沌的;(c )若对响 应进行定时采样,则混沌运动的采样响应因为是随机性。 10.14 应用龙格—库塔方法求得各种不同参数值下达芬方程的相平面,如图10.8所示,问这些运动中那些事混沌的? 解: 因为图10.8(a)的运动图形都无法辨认,所以它是混沌运动。图10.8(b)中的运动由于经过一个初始的过渡周期之后趋于稳态,故它不会是混沌的。10.15 用龙格—库塔方法求出达芬方程的Poincare映射,如图10.9所示。 解:Poincare映射是对相平面定时采样的结果,对Poincare映射的运动解释如下:(a)由于Poincare映射是一些明显的无规则点的集合,故运动可能是混沌的;(b) 因为Poincare 映射是一条封闭的曲线,所以是周期性运动,但样本频率与活动频率不相对应;(c )Poincare 映射只含有三个点,且运动是周期性的,因此运动周期是采样周期的三倍。 10.16 用范德波尔方程来定性分析极限环现象。 解: 当x 很小时,范德波尔方程中的放大系数x 是负值,从而能量都是由系统自己运动提供的,它使得响应不断增强。但当x 增加到1时,阻尼系数就变成正值了,能量随之开始耗散,运动开始衰减,由于自激振幅逐渐衰减就形成了极限环,极限环还取决于初始条件。 10.17 如何用平均法或格莱克法则来逼近极限环的振幅。 解:设),(x x F 为系统的非保守力,这些力作用于在运动一周时所做的功为: ???==dt x x x F dx x x F W ),(),( 如果系统产生一个极限环,则非保守力作用于每一周上的总功都为零,设系统无量纲化后的线性周期为π2,则: 0),(20 =?dt x x x F π 用格莱克法解得响应为: t A t x sin )(= 代入积分方程(10.7)中,计算积分,就可以得到极限环振幅A 的近似值。 10. 18 用平均法来逼近系统的极限环,其无量纲化微分方程为 0)1(22=+-++x x x x x α 解:用题10.17 得方法,设t A t x sin )(=,则得: x x x x x F )1(),(22-+=α ?=π 20,0cos )cos ,sin (tdt A t A t A F 0)cos (]1sin cos [2 20 2222=-+?dt t A t A t A π α 0cos )1(20 2 2 2=-?tdt A A π α 1 )1(22==-A A A πα 补充习题 10.19 求系统相平面轨线的广义方程,微分方程为 0cos =++x x x x ε 答:x x x x C x cos 2sin 22---= 10.20 求系统相平面轨线的广义方程,微分方程为 0=-+x x x α 答:323 2 x x C x α+-= 10.21 求题10.20系统的平衡点并确定其类型。 答:0=x 是中心;α=x 是鞍点。 10.22 求系统的平衡点并确定其类型,微分方程为: 22x x x x εξ+++ 答:1,0<=ξx 时,稳定焦点;1>ξ 时,稳定节点;ε/1-=x 是鞍点。 10.23 求系统的平衡点并确定其类型,微分方程为: 023=+-+x x x x εξ 答:0=x 是鞍点;2,3/1<±=ξx 时,稳定焦点;2>ξ 时,稳定节点。 10.24 推导非线性系统运动周期的积分表达式,微分方程为: 0)cos 1sin(=-+θθ 当0=θ时,0=θ 答:? -++-=0 00000 cos 22cos 2 1 cos 22cos 214θθθθθθ d T 10.25 质量为50kg 的物块固连在弹簧上,弹簧的力与位移关系为 360002000x x F += x 的单位为m ,F 的单位为N ,物块被拉至25cm 处释放,求由此引起的振动周期是多少? 答:0.907s 10.26 用扰动的方法求系统的近似响应(保留两项),微分方程为 t F x x x x ωεμεsin 2=+++ 答: ]cos )1()2cos 4111()1(21[sin 12 2222t F t F t F ωωμωωωωεωω------+- 10.27 用格莱克方法来逼近范德波尔方程极限环的振幅。 答:2 10.28 解释图10.2中的跳跃现象。 10.29 讨论如何用傅里叶变换来确定一个响应是否为混沌。 实验八非线性控制系统分析 【实验目的】 1.掌握二阶系统的奇点在不同平衡点的性质。 2.运用Simulink构造非线性系统结构图。 3.利用Matlab绘制负倒描述函数曲线,运用非线性系统稳定判据进行稳定性分析,同 时分析交点处系统的运动状态,确定自振点。 【实验原理】 1.相平面分析法 相平面法是用图解法求解一般二阶非线性系统的精确方法。它不仅能给出系统稳定性信息和时间特性信息,还能给出系统运动轨迹的清晰图像。 设描述二阶系统自由运动的线性微分方程为 分别取和为相平面的横坐标与纵坐标,并将上列方程改写成 上式代表描述二阶系统自由运动的相轨迹各点处的斜率。从式中看出在及,即 坐标原点(0,0)处的斜率。这说明,相轨迹的斜率不能由该点的坐标值单值的确定,相平面上的这类点成为奇点。 无阻尼运动形式()对应的奇点是中心点; 欠阻尼运动形式()对应的奇点是稳定焦点; 过阻尼运动形式()对应的奇点是稳定节点; 负阻尼运动形式()对应的奇点是不稳定焦点; 负阻尼运动形式()对应的奇点是不稳定节点; 描述的二阶系统的奇点(0,0)称为鞍点,代表不稳定的平衡状态。2.描述函数法 设非线性系统经过变换和归化,可表示为非线性部分与线性部分相串联的典型反馈结构如图所示。 从图中可写出非线性系统经谐波线性化处理线性化系统的闭环频率响应为 由上式求得图中所示非线性系统特征方程为 ,还可写成 其中 称为非线性特性的负倒描述函数。若有 使上式成立,便有 或 ,对应着一个正弦周期运动。若系统扰动后,上述周期运 动经过一段时间,振幅仍能恢复为 ,则具有这种性质的周期运动,称为自激振荡。 可见自激振荡就是一种振幅能自动恢复的周期运动。周期运动解 可由特征方程式 求得,亦可通过图解法获得。 由等式在复数平面上分别绘制 曲线和 曲线。两曲线的 交点对应的参数 即为周期运动解。有几个交点就有几个周期运动解。至于该解是 否对应着自激振荡状态,取决于非线性系统稳定性分析。 【实验内容】 1. 相平面分析法 (1)二阶线性系统相平面分析不同奇点的性质 例8-1 设一个二阶对象模型为 2 2 2 ()2n n n G s s s ωξωω= ++ 绘制2,n ωζ=分别为0.5、-0.5、1. 25、0时系统的相平面图及2 4()4 G s s = -的相平面图。 图8-1 当2,0.5n ωζ==时,系统的单位阶跃响应曲线和相平面图 例1:生产计划问题 某工厂明年根据合同,每个季度末向销售公司提供产品,有关信息如下表。若当季生产的产品过多,季末有积余,则一个季度每积压一吨产品需支付存贮费O.2万元。现该厂考虑明年的最佳生产方案,使该厂在完成合同的情况下,全年的生产费用最低。试建立模型。 解: 法1 设每个季度分别生产x1,x2,x3,x4 则要满足每个季度的需求x4≥26 x1+ x2≥40 x1+ x2+ x3≥70 x1+ x2+ x3+ x4=80 考虑到每个季度的生产能力 0≤x1≤30 0≤x2≤40 0≤x3≤20 0≤x4≤10 每个季度的费用为:此季度生产费用+上季度储存费用 第一季度15.0x1 第二季度14 x2 0.2(x1-20) 第三季度15.3x3+0.2(x1+ x2-40) 第四季度14.8x4+0.2(x1+ x2+ x3-70) 工厂一年的费用即为这四个季度费用之和, 得目标函数;minf=15.6 x1+14.4 x2+15.5 x3+14.8 x4-26 s.t.x1+ x2≥40 x1+ x2+ x3≥70 x1+ x2+ x3+ x4=80 20≤x1≤30 0≤x2≤40 0≤x3≤20 0≤x4≤10。 法2:设第i季度生产而用于第j季度末交货的产品数量为xij吨 根据合同要求有: xll=20 x12+x22=20 x13+x23+x33=30 x14+x24+x34+x44=10 又根据每季度的生产能力有: xll+x12+x13+x14≤30 x22+x23+x24≤40 x33+x34≤20 x44≤10 第i季度生产的用于第j季度交货的每吨产品的费用cij=dj+0.2(j-i),于是,有线性规划模型。 minf=15.Oxll+15.2x12+15.4xl3+15.6xl4+14x22+14.2x23+14.4x24+15.3 x33+15.5x34+14.8x44 s.t. xll=20, x12+x22=20, x13+x23+x13=30, x14+x24+x34+x44=10, x1l+x12+x13+x14≤30, x22+x23+x24≤40, x33+x34≤20, 在线考试系统中题库的设计与实现 摘要:如今,计算机网络以及信息技术的不断发展,社会对教育考试的需求日益增长,对教育考试的质量要求也日益提高。在传统的出题工作中,一份试卷的形成往往需要大量的人力物力,耗费大量的时间做着繁琐的工作。因此为方便在线考试的试卷管理而建立的题库也应运而生。 关键词:在线考试;JDBC技术;B/S模式;题库 网络的普及使得世界变得越来越小,信息的传递共享也变得更加的迅速与便捷;因而人们获取知识的途径也越来越多,传统的卷面考试方式已经不能满足人们的需求,在线考试就逐渐进入人们的网络生活;在进行网络考试的同时,网络在线考试的后台题库管理至关重要。建立一个完备的题库管理部分,需要通过利用数据库以及先进的开发平台,根据现有的数据关系,开发一个具有开放体系结构、便于管理、方便教师在线组卷、对试题进行合理的题库管理系统。 1 系统相关技术 随着计算机技术的发展,运用计算机数据库来进行后台数据整合以及分类处理的大型数据库越来越多,通过JDBC 技术建立与数据库后台的连接,实现Java程序对数据库的访问;JSP技术是编写WEB网页前台页面的主流技术;Tomcat 服务器成为了一个桥梁通过JSP页面将用户与服务器连接起来。而对于题库管理的核心――组卷算法,选取合理有效的组卷算法将有利于整个系统的高效运行。 1.JDBC技术 JDBC(Java Database Connectivity的简写),是Java语言中用来规范客户端程序如何来访问数据库的应用程序接口,提供了相应查询和更新数据库中数据的方法。它是一种用于执行SQL语句的Java API,可以为多种关系数据库提供统一的访问,由一组用Java语言编写的类和接口组成。 2.B/S模式 B/S模式(Browser/Server,浏览器/服务器模式),它是随着Internet技术的兴起,对C/S结构的一种变化或者改进的结构,在这种结构之下,WEB浏览器是最主要的用户工作界面,极少的一部分事务逻辑在前端(Browser)实现,主要的事务逻辑在服务器端(Server)实现,从而形成三层架构。对于B/S结构的软件来讲,由于其数据是集中存放的,客户端发生的每一笔业务单据都直接进入到中央数据库,不会出现数据不一致性的问题。 3.CSS样式 CSS是Cascading Style Sheets(“级联样式表单”或“层叠样式表单”)的英文缩写,这是一种用于表现HTML或XML 等文件样式的计算机语言,用于控制WEB页面的外观。它可 11(2),12,14,18 习题 2-1 判断下列说法是否正确: (1) 任何线性规划问题存在并具有惟一的对偶问题; T (2) 对偶问题的对偶问题一定是原问题;T (3) 根据对偶问题的性质,当原问题为无界解时,其对偶问题无可行解,反之, 当对偶问题无可行解时,其原问题具有无界解;F (4) 若线性规划的原问题有无穷多最优解,则其对偶问题也一定具有无穷多最优 解; (5) 若线性规划问题中的b i ,c j 值同时发生变化,反映到最终单纯形表中,不会出 现原问题与对偶问题均为非可行解的情况; (6) 应用对偶单纯形法计算时,若单纯形表中某一基变量x i <0,又x i 所在行的元素全 部大于或等于零,则可以判断其对偶问题具有无界解。 (7) 若某种资源的影子价格等于k ,在其他条件不变的情况下,当该种资源增加 5个单位时,相应的目标函数值将增大5k ; (8) 已知y i 为线性规划的对偶问题的最优解,若y i >0,说明在最优生产计划中第 i 种资源已经完全耗尽;若y i =0,说明在最优生产计划中的第i 种资源一定有剩余。 2-2将下述线性规划问题化成标准形式。 ????? ? ?≥≥-++-≤+-+-=-+-+-+-=无约束 43 214321432143214321,0,,232142224.5243max )1(x x x x x x x x x x x x x x x x st x x x x z 2-3分别用图解法和单纯形法求解下述线性规划问题,并对照指出单纯形表中的各基 可行解对应图解法中可行()?????≥≤≤-+-=++-+-=无约束 321 3213213 21,0,06 24 .322min 2x x x x x x x x x st x x x z 域的哪一顶点。 ()??? ??≥≤+≤++=0,8259 43.510max 12 1212121x x x x x x st x x z ()??? ??≥≤+≤++=0,242615 53.2max 22 121212 1x x x x x x st x x z 2-4已知线性规划问题,写出其对偶问题: 5 43212520202410max x x x x x z ++++= 3描述函数法一.本质非线性特性的谐波线性化 1.谐波线性化具有本质非线性的非线性元件在正弦输入作用下在其非正弦周期函数的输出响应中假设只有基波分量有意义从而将本质非线性特性在这种假设下视为线性特性的一种近似 3.应用描述函数法分析非线性系统的前提 a 非线性特性具有奇对称心 b非线性系统具有图a所时的典型结构 c非线性部分输出xt中的基波分量最强 d非线性部分Gs的低通滤波效应较好 b非线性特性的描述函数的求取方法二.典型非线性特性的描述函数 1饱和特性的描述函数 2死区特性描述函数 3间隙特性的描述函数 1 引言第七章非线性控制系统分析非线性指元件或环节的静特性不是按线性规律变化非线性系统如果一个控制系统包含一个或一个以上具有非线性静特性的元件或环节则称这类系统为非线性系统其特性不能用线性微分方程来描述一.控制系统中的典型非线性特性下面介绍的这些特性中一些是组成控制系统的元件所固有的如饱和特性死区特性和滞环特性等这些特性一般来说对控制系统的性能是不利的另一些特性则是为了改善系统的性能而人为加入的如继电器特性变增益特性在控制系统中加入这类特性一般来说能使系统具有比线性系统更为优良的动态特性非线性系统分析饱和特性 2死区特性危害使系统输出信号在相位上产生滞后从而降低系统的相对稳定性使系统产生自持振荡危害使系统输出信号在相位上产生滞后从而降低系统的相对稳定性使系统产生自持振荡 4继电器特性功能改善系统性能的切换元件 4继电器特性特点使系统在大误差信号时具有较大的增益从而使系统响应迅速而在小误差信号时具有较小的增益从而提高系统的相对稳定性同时抑制高频低振幅噪声提高系统响应控制信号的准确度本 在一个草图中,绘制两个没有交集的圆,对其进行拉伸,会出现以下哪种情况?_____。 (A)提示不能生成不连续的实体 (B)生成两个实体 (C)生成一个实体 (D)生成两个曲面 相同的零件如果多次插入装配体,SolidWorks使用_____来记录装配体插入的次数。 (A)数量 (B)编号 (C)标记 (D)实例号 如果选择模型边线,然后单击草图绘制工具,SolidWorks将会:_____。 (A)生成一个垂直于所选边线的参考基准面(其原点在选择边线位置的最近端),然后在新基准面上打开草图 (B)报告一个错误,表示必须先选择一个基准面或模型面才能生成草图 (C)打开一个3D草图 (D)编辑选择的草图 要将SolidWorks的颜色、纹理和装饰螺纹数据延伸给所有阵列实例和镜向特征,在PropertyManager中选取_____属性。 (A)随形变化 (B)延伸视象 (C)源特征 (D)保持形状 在工程图纸中,常常要用到符合标准的图纸格式。用户如何编辑自己的图纸模板呢? _____。 (A)直接在现有的图纸上画边框 (B)进入“编辑图纸格式”中进行编辑 (C)直接利用原来在二维软件中的标准格式 (D)直接选用软件本身自带的图纸格式 怎样将一个直径尺寸修改成半径表示?下列哪种做法不正确_____。 (A)右击尺寸,在属性对话框中将【显示为直径尺寸】选项的勾去掉 (B)右击尺寸,在【显示选项】中选择【显示成半径】 (C)右击尺寸,选择【显示成半径】 (D)删除直径尺寸,然后重新标注成半径尺寸 尺寸标注中,使用那种命令实现?_____ (A)智能尺寸 (B)基准尺寸 (C)尺寸链 (D)共线/径向对齐 使用拉伸特征时,终止条件选择【到离指定面指定的距离】选项。若指定面是圆锥面,拉伸的结束面是_____。 (A)平面 (B)圆柱面 (C)无法成形 (D)圆锥面 简单的线性规划问题 [ 学习目标 ] 1.了解线性规划的意义以及约束条件、目标函数、可行解、可行域、最优解等基本概念 .2. 了解线性规划问题的图解法,并能应用它解决一些简单的实际问题. 知识点一线性规划中的基本概念 知识点二线性规划问题 1.目标函数的最值 线性目标函数 z=ax+by (b≠0)对应的斜截式直线方程是 y=-a x+z,在 y 轴上的 截距是z, b b b 当 z 变化时,方程表示一组互相平行的直线. 当 b>0,截距最大时, z 取得最大值,截距最小时, z 取得最小值; 当 b<0,截距最大时, z 取得最小值,截距最小时, z 取得最大值. 2.解决简单线性规划问题的一般步骤在确定线性约束条件和线性目标函数的前提下,解决简单线性规划问题的步骤可以概括为:“画、移、求、答”四步,即, (1)画:根据线性约束条件,在平面直角坐标系中,把可行域表示的平面图形准确地画出来,可行域可以是封闭的多边形,也可以是一侧开放的无限大的平面区域.(2)移:运用数形结合的思想,把目标函数表示的直线平行移动,最先通过或最后通过的顶点 (或边界 )便是最优解. (3)求:解方程组求最优解,进而求出目标函数的最大值或最小值. (4)答:写出答案. 知识点三简单线性规划问题的实际应用 1.线性规划的实际问题的类型 (1)给定一定数量的人力、物力资源,问怎样运用这些资源,使完成的任务量最大,收到的效益最大; (2)给定一项任务,问怎样统筹安排,使完成这项任务耗费的人力、物力资源量最小.常见问题有: ①物资调动问题例如,已知两煤矿每年的产量,煤需经两个车站运往外地,两个车站的运输能力是有限的,且已知两煤矿运往两个车站的运输价格,煤矿应怎样编制调动方案,才能使总运费最小? ②产品安排问题例如,某工厂生产甲、乙两种产品,每生产一个单位的甲种或乙种产品需要的A、B、C 三种 材料的数量,此厂每月所能提供的三种材料的限额都是已知的,这个工厂在每个月中应如何安排这两种产品的生产,才能使每月获得的总利润最大? ③下料问题例如,要把一批长钢管截成两种规格的钢管,应怎样下料能使损耗最小?2.解答线性规划实际应用题的步骤 (1)模型建立:正确理解题意,将一般文字语言转化为数学语言,进而建立数学模型,这需要在学习有关例题解答时,仔细体会范例给出的模型建立方法. (2)模型求解:画出可行域,并结合所建立的目标函数的特点,选定可行域中的特殊点作为最优解. (3)模型应用:将求解出来的结论反馈到具体的实例中,设计出最佳的方案. 题型一求线性目标函数的最值 y≤2, 例 1 已知变量 x,y 满足约束条件 x+y≥1,则 z=3x+y 的最大值为 ( ) x-y≤1, A . 12 B .11 C .3 D .- 1 答案 B 解析首先画出可行域,建立在可行域的基础上,分析最值点,然后通过解方程组得最值点 的坐标,代入即可.如图中的阴影部分,即为约束条件对应的可行域,当直线y=-3x+z 经 y=2,x= 3, 执法人员考试 总分:100分合格分数线:60分考试时间:90分钟 一、单选题() 1 、行政处罚通常的管辖机关是: A.违法行为发生地的法律、法规授权的组织 B.违法行为发生地的县级以上人民政府 C.违法行为发生地的县级以上地方人民政府具有行政处罚权的行政机关 D.违法行为发生地的受委托的组织 【收藏】 本题得分:1 【正确答案】C 【您的答案】C 【所在章】行政处罚法 【知识点】行政处罚法 【答案解析】 C 2 、行政机关及其执法人员对违法行为人处以罚款的当场处罚,在()情形下,当事人有权拒绝当场缴纳罚款。 A.依法给予20元以下的罚款处罚的 B.不当场收缴事后难以执行的 C.不出具省、自治区、直辖市财政部门统一制发的罚款收据的 D.不适用听证程序作出罚款处罚决定的 【收藏】 本题得分:1 【正确答案】C 【您的答案】C 【所在章】行政处罚法 【知识点】行政处罚法 【答案解析】 C 3 、国家对行政机关及其工作人员的合法行为造成的损失可以给予()。 A、行政赔偿 B、行政补偿 C、民事赔偿 D、司法赔偿 【收藏】 本题得分:0 【正确答案】B 【您的答案】A 【所在章】 【知识点】 【答案解析】 B 4 、在一起离婚诉讼中,人民法院误将传票送达给与黄月琴同名的邻村的黄月琴,后者的丈 夫一直在外地打工,当她接到法院的传票后,承受不住这种打击,引起精神病复发,不能劳动,生活上不能自理。对于此案,人民法院对精神混乱的黄月琴应否负赔偿义务?()A、不应当负赔偿义务,因为黄月琴以前就有精神病,并不是人民法院误发传票的行为才导致其有精神病 B、不应当负赔偿义务,因为人民法院误发传票的行为只是给其精神造成损害,而对于精神赔偿在我们国家赔偿中是不存在的 C、不应当承担赔偿义务,因为黄某所受损害是由人民法院工作人员的个人行为造成的,应当由有关责任人员负赔偿责任 D、人民法院可以根据《民法通则》第121条的规定承担赔偿义务 【收藏】 本题得分:0 【正确答案】D 【您的答案】 【所在章】 【知识点】 【答案解析】 D 5 、国家对()行为,不承担赔偿责任。 A、行政机关违反法律规定征收财物的 B、违法的行政处罚 C、违法的强制执行措施 D、行政机关工作人员与行使职权无关的个人行为 【收藏】 本题得分:1 【正确答案】D 【您的答案】D 【所在章】 【知识点】 【答案解析】 D 6 、行政复议法》的制定主体为: A.全国人民代表大会B.全国人民代表大会常务委员会C.国务院D.中国共产党 【收藏】 本题得分:1 【正确答案】B 【您的答案】B 【所在章】 【知识点】 【答案解析】 7 、王某贩卖盗版光碟被文化局查处,罚款1000元。王某不服申请行政复议,但是复议机关也维持了处罚决定。王某逾期不履行维持原具体行政行为的行政复议决定,应当如何处理? A.由作出原具体行政行为的行政机关依法强制执行,或者申请人民法院强制执行B.由行 一. 问题描述 锅炉气温状态变反馈控制系统 主气温控制对象4221) 8.151(45.2)141(589.1)()()(s s s W s W s W o o O ++== 已知燃烧扰动通道:2) 125(1)(+=s s W d (1)对电站锅炉气温PID 控制系统加入死区模块。 (2)比较非线性参数变化后对系统的影响。 二. 理论方法分析 在实际中,几乎所有的控制系统中都存在非线性元件,或者是部件中含有非线性。在一些系统中,人们甚至还有目的地应用非线性部件来改善 系统性能。 自动控制系统的非线性特性,主要是由受控对象、检测传感元件、执行机构、调节机构和各种放大器等部件的非线性特性所造成的。在一个控制系统中,只有包含有一个非线性元件,就构成了非线性控制系统。在自动控制系统中经常遇到的典型非线性特性有饱和特性、死区(即不灵敏区)特性、间隙特性、摩擦(即阻尼)特性、继电器特性和滞环特性等。这些非线性特性一般都会对控制系统的正常工作带来不利的影响。但是,在有些情况下,也可以利用某些非线性特性(例如继电器特性、变放大系数特性等)来改善控制系统,是指比纯线性系统具有更为优良的动态性能。下面就三种典型非线性特性,及非别对自动控制系统的影响。 饱和特性的特点是当输入信号x 的绝对值超过线性部分的宽度时,其输出信号y 不再随输入的变化而变化,将保持为一个常数值。这相当于通过这一饱和非线性元件或环节的平均放大系数(增益)下降了。这就是放大器的饱和输出特性。试验研究表明,它可能是系统的过程时间家常和稳态误差增加,也可能使系统的振荡性减弱(振幅下降,振荡频率降低)。对于发散振荡的系统,由于饱和特性的影响,可以转化为自激荡的系统。 死区特性的特点是当输入信号x 的绝对值不超过死区宽度时,死区非线性元件或环节将无信号输出,只有当输入信号大于死区宽度后,才会有输出信号,并与输入信号呈线性关系。死区对控制系统的影响,首先是造成系统的稳定误差。一般不会加强过度过程中的振荡性,振荡强度下降,从而增加了系统的稳定性, 2.可行性研究 2.1系统开发的目的和意义 随着网络技术的飞速发展,现在很多国外的大学和社会其他部门都已经开设了远程教育,通过计算机网络实现异地教育和培训。当前,计算机硬件技术的发展已经达到了相当高的水平。但是,远程教育软件的开发目前还处于起步阶段,随着这项技术的不断深入发展,就要求有更好、更完善的软件系统应用到远程教育当中去,这就给软件设计人员提出了更高的设计要求。 在线考试是现阶段研究开发的一个热点。它是建立在国际互联网上的应用系统,客户端的配置可以极为简单,使考试不受地域的局限。一个完备的在线试题库系统可以使用户在网上学习过后及时检验自己的学习效果,并发现自己的不足,使得学习效率得到很大提高。考试系统中题目的生成、试卷的提交、成绩的批阅等都可以在网络上自动完成。只要形成一套成熟的题库就可以实现考试的自动化,这样一来,教师所要做的只是精心设计题目、维护题库,而不是组织考试,从而大大减轻了教师的负担,这表明其经济性是相当可观的。 2.2技术可行性 目前,网络应用软件运行的模式主要有两类:C/S模式,B/S模式。C/S模式简单地讲就是基于企业内部网络的应用系统。它和B/S模式相比最大的好处是不依赖企业外网环境,即无论企业是否能够上网,都不影响应用。但是它也有很多缺点,他必须安装客户端,势必造成维护、升级的麻烦。而B/S模式则解决了这一问题,B/S模式是通过互联网来实现的,它何以随时随地的进行查询和浏览业务,维护简单,只需改变网页,即可实现所有用户的同步更新,开发简单,共享性强。所以大多数软件都采用B/S模式。服务器端采用SQLServer 数据库系统和微软最新的.net平台及https://www.doczj.com/doc/b313453051.html,技术来构成考试的应用服务系统;客户端采 线性规划常见题型及解法 由已知条件写出约束条件,并作出可行域,进而通过平移直线在可行域内求线性目标函数的最优解是最常见的题型,除此之外,还有以下六类常见题型。 一、求线性目标函数的取值范围 例1、 若x 、y 满足约束条件222x y x y ≤?? ≤??+≥? ,则z=x+2y 的取值范围是 ( ) A 、[2,6] B 、[2,5] C 、[3,6] D 、(3,5] 解:如图,作出可行域,作直线l :x+2y =0,将 l 向右上方平移,过点A (2,0)时,有最小值 2,过点B (2,2)时,有最大值6,故选A 二、求可行域的面积 例2、不等式组260302x y x y y +-≥?? +-≤??≤? 表示的平面区域的面积为 ( ) A 、4 B 、1 C 、5 D 、无穷大 解:如图,作出可行域,△ABC 的面积即为所求,由梯形OMBC 的面积减去梯形OMAC 的面积即可,选B 三、求可行域中整点个数 例3、满足|x|+|y|≤2的点(x ,y )中整点(横纵坐标都是整数)有( ) A 、9个 B 、10个 C 、13个 D 、14个 x y O 2 2 x=2 y =2 x + y =2 B A 2x + y – 6= 0 = 5 x +y – 3 = 0 O y x A B C M y =2 解:|x|+|y|≤2等价于2(0,0)2(0,0)2(0,0) 2 (0,0)x y x y x y x y x y x y x y x y +≤≥≥??-≤≥? ? -+≤≥??--≤? 作出可行域如右图,是正方形内部(包括边界),容易得到整 点个数为13个,选D 四、求线性目标函数中参数的取值范围 例4、已知x 、y 满足以下约束条件5503x y x y x +≥?? -+≤??≤? ,使z=x+ay(a>0) 取得最小值的最优解有无数个,则a 的值为 ( ) A 、-3 B 、3 C 、-1 D 、1 解:如图,作出可行域,作直线l :x+ay =0,要使目标函数z=x+ay(a>0)取得最小值的最优解 有无数个,则将l 向右上方平移后与直线x+y =5重合,故a=1,选D 五、求非线性目标函数的最值 例5、已知x 、y 满足以下约束条件220240330x y x y x y +-≥?? -+≥??--≤? ,则z=x 2+y 2的最大值和最小值分别是( ) A 、13,1 B 、13,2 C 、13,4 5 D 、 5 解:如图,作出可行域,x 2+y 2是点(x ,y )到原点的距离的平方,故最大值为点A (2,3)到原点的距离的平方,即|AO|2=13,最小值为原点到直线2x +y -2=0的距离的平方,即为 4 5 ,选C 六、求约束条件中参数的取值范围 例6、已知|2x -y +m|<3表示的平面区域包含点 (0,0)和(- 1,1),则m 的取值范围是 ( ) A 、(-3,6) B 、(0,6) C 、(0,3) D 、(-3,3) 企业题库考试管理系统方案 软件开发部 2015-05-14 目录 1.概述 (4) 1.1项目背景 (4) 1.2设计原则 (4) 2.总体架构 (5) 2.1总体流程 (5) 3.系统功能 (6) 3.1题库管理 (6) 3.1.1知识体系管理 (6) 3.1.2出题权限管理 (6) 3.1.3知识体系类别管理 (6) 3.1.4试题管理 (6) 3.1.5查询统计 (8) 3.2自学自测管理 (8) 3.2.1自学管理 (8) 3.2.2自测管理 (9) 3.2.3错题本管理 (9) 3.3手机自学模块 (9) 3.3.1手机自学管理 (10) 3.3.2手机错题本管理 (10) 3.4在线考试管理 (10) 3.4.1试卷管理 (10) 3.4.2参考人管理 (11) 3.4.3在线考试 (11) 3.4.4查询统计 (12) 3.5系统管理模块 (12) 3.5.1组织机构管理 (12) 3.5.2人员管理 (12) 3.5.3人员权限管理 (12) 4.功能清单 (12) 1.概述 1.1项目背景 考试作为直接体现信息化社会中人们掌握知识水平的一种方式,是目前使用最广泛的形式之一,传统的考试从出题、组卷、印刷、到试卷分发、答题、收卷、再到判卷、公布成绩,整个过程都需要人工参与,周期长,工作量大,容易出错,还要有适当的保密工作,使得整个考试成本比较大。 当前,随着信息技术的飞速发展,特别是互联网技术的广泛使用,使得考试管理信息化、自动化成为可能。考试题库管理系统是取代传统考试的应用型软件,完全实现电脑自动化,为出题、组卷和答题提供了良好的系统架构,从而实现统一管理题库、自动组卷、自动判卷,并提供丰富的报表统计功能,还可按照用户的需求定制化开发个性功能,极大的节省了人力、物力、财力,提高了效率,真正实现无纸网络考试和学习。 1.2设计原则 先进性:系统的软件结构、组网方式和设备配置保证系统的先进性,以确保系统能有提高系统的生产效率和管理水平。同时,系统还能保持中长期的先进性以适应未来系统发展的需要。 稳定性:系统具有良好的稳定性和抗攻击能力,系统的接入不影响原有相关系统的正常运行,系统本身的升级和扩充不影响系统的实时运行。 规范化:系统需求分析、详细设计、系统开发、系统验收、售后服务及维护均遵循规范的流程以保证系统质量。 标准化:系统遵循国家标准和相关的行业标准,并对外提供标准接口以利于系统的向上接入 机电系统非线性控制方法的发展方向 摘要 控制理论的发展经过了经典控制理阶段和现代控制理论阶段。但是两者所针对的主要是线性系统。然而,实际工程问题中所遇到的系统大多是非线性的,采用上述两种理论只能是对实际系统进行近似线性化。在一定范围内采用这种近似现行化的方法可以达到需要的精度。但是在某些情况下,比如本质非线性就无法采用前述方法。这种情况下就必须采用非线性控制理论。 非线性控制的经典方法主要有相平面法,描述函数法,绝对稳定性理论,李亚普诺夫稳定性理论,输入输出稳定性理论。但是这些经典理论存在着局限性,不够完善。 随着非线性科学的发展,一些新的方法随之产生。最新的发展成果主要有:微分几何法,微分代数法,变结构控制理论,非线性控制系统的镇定设计,逆系统方法,神经网络方法,非线性频域控制理论和混沌动力学方法。这些新成果对于解决非线性系统的控制问题,完善非线性系统理论具有重要作用,也是今后非线性系统控制的发展方向。 关键词非线性控制;最新发展成果;发展方向 引言 迄今为止,控制理论的发展经过了经典控制理论和现代控制理论阶段。经典控制阶段主要针对的是单输入单输出(SISO)线性系统,通过在时域和频域内对系统进行建模实现对系统的定量和定性分析,经典控制理论在工程界得到了广泛的应用,而且经典控制方法已经形成了完善的理论体系。然而,随着科学技术的发展,经典控制方法也暴露出了其自身的缺陷,经典控制方法并不关心系统内部的状态变化,而只是局限于将被控对象看作一个整体,并不能准确了解系统内部的状态变化。为了克服经典控制方法的这种缺陷,现代控制方法产生了。现代控制理论只要是在时域内对系统进行建模分析,通过建立系统的状态方程,了解系统内部的状态变化,对系统的了解更加全面透彻。该理论主要针对多输入多输出(MIMO)的线性系统。经典控制理论和现代控制理论的结合使得控制理论在线性问题的控制上达到了完善的地步,在工程界得到了广泛的应用。 然而,经典控制论和现代控制论所针对的是线性系统,实际问题大多是非线性系统,早期的处理方法是将非线性问题线性化,然后再应用上述两种理论。这种方法在一定的范围和精度内可以很好的满足工程需要。随着科学技术的发展,上述两种方法遇到了挑战,例如本质非线性问题,这种问题无法进行局部线性化。因此,要解决这类问题就必须要有一套相应的非线性控制理论。 本文通过阐述控制理论的发展过程中各种理论的应用范围和局限性,特别是针对非线性问题的处理方法,介绍了非线性控制理论要解决的问题,非线性控制的经典方法和最新发展成果,并阐述了非线性控制理论的发展方向。 《运筹学》线性规划部分练习题 一、思考题 1.什么是线性规划模型,在模型中各系数的经济意义是什么? 2 .线性规划问题的一般形式有何特征? 3. 建立一个实际问题的数学模型一般要几步? 4. 两个变量的线性规划问题的图解法的一般步骤是什么? 5. 求解线性规划问题时可能出现几种结果,那种结果反映建模时有错误? 6. 什么是线性规划的标准型,如何把一个非标准形式的线性规划问题转化成标准形式。 7?试述线性规划问题的可行解、基础解、基础可行解、最优解、最优基础解的概念及它们之间的相互关系。 8?试述单纯形法的计算步骤,如何在单纯形表上判别问题具有唯一最优解、有无穷多个最优解、无界解或无可行解。 9. 在什么样的情况下采用人工变量法,人工变量法包括哪两种解法? 10. 大M法中,M的作用是什么?对最小化问题,在目标函数中人工变量的系数取什么?最大化问 题呢? 11 ?什么是单纯形法的两阶段法?两阶段法的第一段是为了解决什么问题?在怎样的情况下,继续 第二阶段? 二、判断下列说法是否正确。 1 .线性规划问题的最优解一定在可行域的顶点达到。 2 .线性规划的可行解集是凸集。 3. 如果一个线性规划问题有两个不同的最优解,则它有无穷多个最优解。 4. 线性规划模型中增加一个约束条件,可行域的范围一般将缩小,减少一个约束条件,可行域的 范围一般将扩大。 5 .线性规划问题的每一个基本解对应可行域的一个顶点。 6. 如果一个线性规划问题有可行解,那么它必有最优解。 7. 用单纯形法求解标准形式(求最小值)的线性规划问题时,与j 0对应的变量都可以被 选作换入变量。 8 .单纯形法计算中,如不按最小非负比值原则选出换出变量,则在下一个解中至少有一 个基变量的值是负的。 9. 单纯形法计算中,选取最大正检验数k对应的变量x k作为换入变量,可使目 标函数值得到最快的减少。 10 . 一旦一个人工变量在迭代中变为非基变量后,该变量及相应列的数字可以从单纯形 表中删除,而不影响计算结果。 三、建立下面问题的数学模型 1 .某公司计划在三年的计划期内,有四个建设项目可以投资:项目I从第一年到 第三年年初都可以投资。预计每年年初投资,年末可收回本利120%,每年又可以重新将所获本利纳入投资计划;项目n需要在第一年初投资,经过两年可收回本利150% , 又可以重新将所获本利纳入投资计划,但用于该项目的最大投资额不得超过20万元;项目川需要在第二年年初投资,经过两年可收回本利160%,但用于该项目的最大投资额 不得超过15万元;项目"需要在第三年年初投资,年末可收回本利140%,但用于该项目的最大投资额不得超过10万元。在这个计划期内,该公司第一年可供投资的资金有 30万元。问怎样的投资方案,才能使该公司在这个计划期获得最大利润? 2 .某饲养场饲养动物,设每头动物每天至少需要700克蛋白质、30克矿物质、 100克维生素。现有五种饲料可供选用,各种饲料每公斤营养成分含量及单 价如下表2—1所示: 线性规划常见题型及解法 由已知条件写出约束条件,并作出可行域,进而通过平移直线在可行域内求线性目标函数的最优解是最常见的题型,除此之外,还有以下六类常见题型。 一、求线性目标函数的取值范围 例1、若x、y满足约束条件 ,则z=x+2y的取值范围是() A、[2,6] B、[2,5] C、[3,6] D、(3,5] 解:如图,作出可行域,作直线l:x+2y=0,将 l向右上方平移,过点A(2,0)时,有最小值 2,过点B(2,2)时,有最大值6,故选A 二、求可行域的面积 例2、不等式组 表示的平面区域的面积为() A、4 B、1 C、5 D、无穷大 解:如图,作出可行域,△ABC的面积即为所求,由梯形OMBC的面积减去梯形OMAC的面积即可,选B 三、求可行域中整点个数 例3、满足|x|+|y|≤2的点(x,y)中整点(横纵坐标都是整数)有() A、9个 B、10个 C、13个 D、14个 解:|x|+|y|≤2等价于 作出可行域如右图,是正方形内部(包括边界),容易得到整点个数为13个,选D 四、求线性目标函数中参数的取值范围 例4、已知x、y满足以下约束条件 ,使z=x+ay(a>0)取得最小值的最优解有无数个,则a的值为() A、-3 B、3 C、-1 D、1 解:如图,作出可行域,作直线l:x+ay=0,要使目标函数z=x+ay(a>0)取得最小值的最优解有无数个,则将l向右上方平移后与直线x+y=5重合,故 a=1,选D 五、求非线性目标函数的最值 例5、已知x、y满足以下约束条件 ,则z=x2+y2的最大值和最小值分别是() A、13,1 B、13,2 C、13, D、 , 解:如图,作出可行域,x2+y2是点(x,y)到原点的距离的平方,故最大值为点A(2,3)到原点的距离的平方,即|AO|2=13,最小值为原点到直线2x+y-2=0的距离的平方,即为 Windows操作 第1套 ●题目 1.在答题文件夹下的WORK_DIR文件夹下建立一新的文件夹,名为MYDIR,并在此文件夹中建立一个名为MYBMP.BMP的空白图象文件。 2.将答题文件夹下的WORK_DIR文件夹下的文件夹MYNA移至以上新建的文件夹中,并将移动的文件夹改名为NEWMYNA。 3.改变屏幕保护为"三维飞行物",并改变桌面背景为"Greenstone"、拉伸。 4.在桌面上建立考生文件夹的快捷方式,快捷方式名为"考生目录"。 第2套 ●题目 1.在答题文件夹下的WORK_DIR\MYNA文件夹中建立一新的文件夹,名为"LIBBAK",并在桌面上建立同名的快捷方式。 2.将答题文件夹下的WORK_DIR\MIMOSA文件夹下的所有以MIT作为扩展名的文件拷贝至新建文件夹LIBBAK中。 3.查找到应用程序"FRONTPG.EXE",并在桌面上建立其快捷方式,快捷方式名为"网页制作"。4.将系统的时间样式设置为"tt hh:mm:ss",上午符号为"am",下午符号为"pm"。 第3套 ●题目 1.删除答题文件夹下的WORK_DIR\MYNA\INDITE文件夹。 2.将答题文件夹下的WORK_DIR下的文件夹MIMOSA移至考生文件夹下的WORK_DIR\MYNA文件夹中,并改名为"NEW MIMOSA"。 3.在开始按钮的程序文件夹中建立新的文件夹"我的文件夹",并在新的文件夹中建立程序NOTEPAD.EXE的快捷方式,名为"记事本"。 4.设置Windows的时间样式为"tt h:mm:ss",短日期格式为"yy-MM-dd"。 第4套 ●题目 1.在答题文件夹下的WORK_DIR\MIMOSA文件夹中建立一个新的文件夹,名为DIRECTORY。 2.在DIRECTORY文件夹下建立WORK_DIR\MYNA文件夹中的文件JAR.DAT的快捷方式,快捷方式名为"JAR快捷方式"。" 3.设置Windows桌面背景为的"Greenstone"、拉伸。 4.将系统的时间样式设置为"tt hh:mm:ss",上午符号为"am",下午符号为"pm"。 第5套 ●题目 1.将答题文件夹下的WORK_DIR\MIMOSA文件夹中的文件HEYDAY.TXP和WORK_DIR\MYNA文件夹中的文件JAR.DAT移至WORK_DIR\MYNA\INDITE文件夹。 2.在桌面上建立本机Windows系统文件夹的快捷方式,快捷方式名为"WINSYS"。 3.在答题文件夹下的WORK_DIR文件夹中,用记事本建立一个名为"标题.txt"的文件,内容为"大学生计算机基础文化教程"。 4.设置Windows屏幕保护程序为"字幕",文字内容为"计算机无纸化考试",文字格式:字体为"黑体"、字号为"30"。 第6套 ●题目 1.将答题文件夹下的WORK_DIR\MYNA文件夹下的INDITE文件夹带同名复制到考生文件夹下的WORK_DIR文件夹中。 2.在答题文件夹下的WORK_DIR\MYNA\INDITE文件夹中建立一个新的BMP图象文件,文件名为PICTURE.BMP。 3.设置桌面背景为"soap Bubbles.bmp",平铺显示;并设置屏幕保护程序为"三维管道"。 第八章非线性控制系统分析 教学目的: 经过学习本章, 使学生掌握秒素函数法与相平面法分析非线性系统的理论基础与应用。 教学要求: (1) 认识非线性系统区别于线性系统的运动过程特点. (2) 掌握描述函数法和相平面法的特点及应用范围. (3) 明确函数的定义及相关概念, 熟悉典型非线性的妙描述和负倒描述函数特 性, 掌握用描述函数法分析非线性系统的稳定性和分析自振, 计算自振参数的方法. 教学课时: 12 学时 教学重点: (1) 非线性的相关概念. (2) 典型系统的相平面表示. (3) 典型非线性系统的描述函数形式. 教学难点: 非线性系统的描述函数求法; 利用负倒数法分析系统稳定性. 本章学时: 12 学时 主要内容: 非线性系统的概述 8.1 描述函数法 8.2 相平面法分析线性控制系统 8.3 8.4利用非线性特性改进系统的控制性能 8.1 非线性系统的概述 8.1.1 非线性模型 ㈠组成 -------- x ------ 非线性环节----------- 线性环节---------- 组成: 非线性环节+线性环节 ㈡. 分类 ①从输入输出关系上分: 单值非线性 非单值非线性 1,从形状特性上分: 饱和 死区 回环 继电器 ㈢特点 稳定性与结构, 初始条件有关; 响应 ㈣分析方法 注意: 不能用叠加原理 1. 非线性常微分方程没有同意的求解方法, 只有同意求近似解的方法: a. 稳定性(时域, 频域) : 由李亚普洛夫第二法和波波夫法判断 b. 时域响应: 相平面法(实际限于二阶非线性系统)较精确, 因高阶作用 太复杂 描述函数法:近似性,高阶系统也很方便 研究非线性系统并不需求得其时域响应的精确解,而重要关心其时域响应的性质, 《嵌入式系统》试题库 一、填空题 1、嵌入式系统的基本定义为:以应用中心,以计算机技术为基础,软件硬件可裁剪,适应应用系统对功能、可靠性、成本、体积、功耗严格要求的专用计算机系统。 2、从模块结构来看,嵌入式系统由三大部分组成,分别是:硬件、软件和开发平台。 3、从层次角度来看,嵌入式系统由四大部分组成,分别是:应用软件层、操作系统层、板级支持包(或硬件抽象层)和硬件层。 4、嵌入式产品的主要度量指标包括:上市时间、设计成本和产品质量。 5、嵌入式系统的设计过程包括:需求分析、规格说明、体系结构设计、构件设计、系统集成和系统测试。 6、需求分析包括:功能性需求分析和非功能性需求分析。 7、确定输入信号是数字信号还是模拟信号属于功能性需求。 8、确定系统的物理尺寸和重量属于非功能性需求。 9、在嵌入式系统的设计过程中,其中规格说明解决“做什么”。 10、在嵌入式系统的设计过程中,其中体系结构设计解决“如何做”。 11、在嵌入式系统的设计过程中,软硬件划分应该在体系结构设计阶段完成。 12、在嵌入式系统的设计过程中,处理器的选择应该在体系结构设计阶段完成。 13、在嵌入式系统的设计过程中,嵌入式操作系统的选择应该在体系结构设计阶段完成。 14、在嵌入式系统的设计过程中,完成原理图设计应在构件设计阶段完成。 15、在嵌入式系统的设计过程中,完成版图设计应在构件设计阶段完成。 16、在嵌入式系统的设计过程中,完成软件设计应在构件设计阶段完成。 17、反映嵌入式系统设计人员的水平能力主要在于总体设计(需求分析、规格说明和体系结构设计)和系统调试。 18、设计流程指的是设计过程中所经历的过程步骤。 19、设计重用技术主要分为基于 IP 核的模块级重用和基于平台的系统级重用。 20、软硬件协同设计由系统描述、软硬件划分、软硬件协同综合以及软硬件协同模拟与验证几个阶段组成。 21、嵌入式处理器的分类包括三种,分别是:嵌入式微处理器、微控制器(或单片机)和实验八 非线性控制系统分析
线性规划典型例题
在线考试系统中题库的设计与实现
128499-管理运筹学-第二章线性规划-习题
非线性控制系统分析
solidworks考试试题考试系统题库
(完整版)简单的线性规划问题(附答案)
执法人员在线考试系统题库
非线性控制系统研究2
在线试题库系统的设计与实现
线性规划经典例题
企业题库考试管理系统方案
机电系统非线性控制方法的发展方向
《运筹学》习题线性规划部分练习题及答案.doc
八种经典线性规划例题最全总结(经典)
考试系统题库1考试系统题库Windows操作
非线性控制系统分析样本
嵌入式系统期末考试题库及答案
相关主题
文本预览