摘要
车牌识别系统作为智能交通系统的重要组成部分,在交通监视和控制中占有很重要的地位,已成为现代交通工程领域中研究的重点和热点之一。车牌识别技术综合了图形处理、计算机视觉、模式识别的技术以及人工智能等多科学知识,目的在于无需为车辆加装其他特殊装置的情况下对车辆进行自动监控,从而给交通系统的自动化管理提供便捷。
本论文首先阐述了车牌识别系统的发展、现状以及整体构建,然后介绍了Qt平台以及OpenCV 跨平台视觉库的发展状况,并对如何在Win7下配置OpenCV的Qt开发环境做出了介绍。本文重点讨论了图像的定位、字符分割和字符识别的原理与实现,最后对系统进行了整体的测试,并提出进一步开发设想。
关键词
图像定位;字符分割;字符识别;
Abstract
License Plate Recognition System plays an important role in traffic surveillance and contr ol as an important part of the intelligent transportation system, has become the focus and hots pot of research in the field of modern traffic engineering. License Plate Recognition technolo gy combines scientific technologies such as image processing, computer vision, pattern recog nition and artificial intelligence, the aim is to automatically control the vehicle without the ne ed to install other special equipments, and thus to provide automated traffic management syste m convenience.
This thesis describes the development of license plate recognition system, the present situ ation and the overall build in the first, then introduces the development of Qt platform and cr oss-platform visual OpenCV library, and makes a presentation of how to configure the OpenC V under Win7 Qt development environment. This article focuses on the principles and imple mentation of image positioning, character segmentation and character recognition. Finally, thi s thesis tests the whole system, and proposes ideas of further development.
Key words
Image Positioning; Character Segmentation; Character Recognition;
I
前言
随着现在经济的发展和城市进程加快,汽车数量迅速增长,交通拥挤,交通事故等问题已经成为世界各国面临的共同难题,每个国家都毫无例外地承受着不断加剧的交通问题的困扰。全球对交通运输提出了更大更高的要求,智能交通系统是世界各国解决交通拥挤的问题的关键措施,是规范智能交通系统发展的重要手段,其使人、车、路密切地配合,和谐地统一,极大提高交通运输效率、保障交通安全、改善环境质量和提高能源利用率。
汽车车牌识别技术是计算机视觉和模式识别技术在现代智能交通系统中的一项重要研究课题,是实现交通管理智能化的重要环节。车牌识别系统是以数字图像处理、模式识别、计算机视觉等技术为基础的智能识别系统,它利用每一个汽车都有唯一的车牌号码,通过摄像机所拍摄的车辆图像进行车牌号码识别。在不影响汽车运行的状态下,计算机自动完成车牌的识别,可降低交通管理工作的复杂程度。
1 课题概述
1.1 课题研究的意义与背景
近几年来,随着车辆在普通民众生活中的普及,城市交通的压力越来越成为影响人们出行方便的一大障碍,同时越来越重的城市交通压力也使越有的交通管理系统不再满足需求,于是人们利用各种先进的科学技术研制出各种交通道路,车辆的管理系统,逐步发展到如今较为全面的,包括交通管理多个方面的智能交通系统(Intelligent Transportation System,ITS)。而在整个智能交通系统中,车牌识别(License Plate Recognition,LPR)更是其中的一项关键所在。
车牌识别技术是融合了图像处理、计算机视觉、模式识别技术和人工智能等多科学知识在内的在交通领域的重要研究课题之一,是实现交通管理能够智能化的重要环节和手段,其任务是分析、处理汽车图像,自动识别车牌号,并进行相关智能化数据库管理。车牌识别系统可以广泛应用于电子收费、出入控制、公路流量监控、失窃车辆查询和停车场车辆管理等需要车牌认证的场合;特别是在高速公路收费系统中,实现不停车收费提高公路系统的运行效率,车牌识别系统更具有不可替代的作用。因而从事车牌识别技术的研究具有极其重要的现实意义和巨大的经济价值。
在现代社会,随着计算机技术、通信技术和计算机网络技术的发展,自动化的信息处理能力和水平不断提高,并在人们社会活动和生活的各个领域得到广泛的应用,人们正在逐步进入信息时代。在此情况下,作为信息来源的自动检测、图像识别技术越来越受到人们的重视。作为现代社会的主要交通工具之一的汽车,在人们的生产、生活的各个领域得到大量的使用,对它的信息自动采集和管理在交通车辆管理、园区车辆管理、停车场管理等方面有十分重要的意义,成为信息处理技术的一项重要课题。
1.2 国内车牌特征与规格
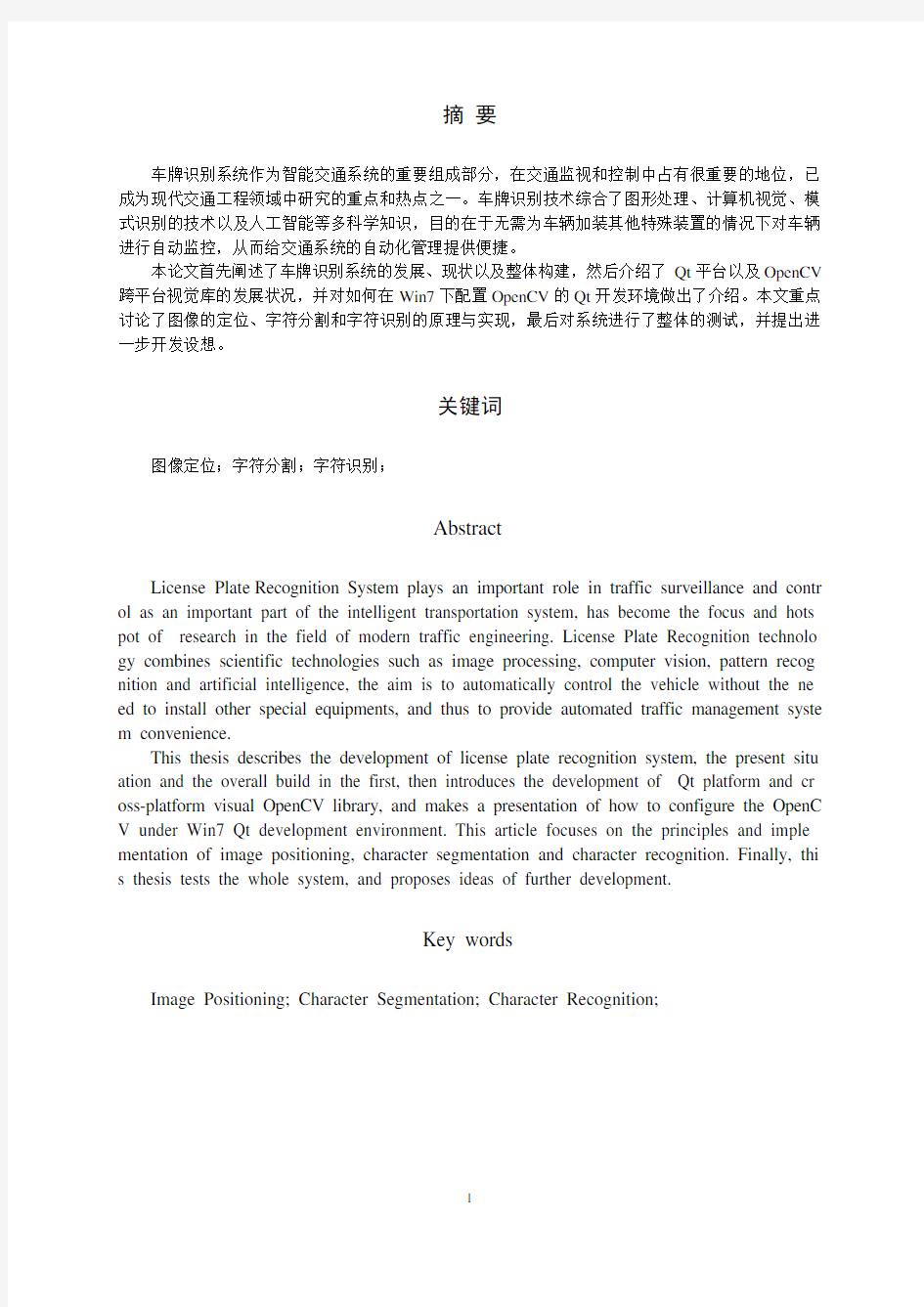
我国机动车辆使用的号牌是按照GA36-2007《中华人民共和国机动车号牌》标准设计,按照标准GA36-2007规定,机动车前面牌照的长度是44cm,宽度是14cm,共有7个字符,车牌上的字符的高度是90mm,宽度是45mm,分隔符“.”的直径是10mm,字符与字符之间、字符与分隔符“.”之间的标准距离是12mm,但是,由于字符的形状是不一样的,有些字符没有占据整个矩形空间的宽度,这就导致车牌上部分字符之间的距离大于12mm。其中,民用汽车牌照上有省、直辖市、自治区的简称和发证照及监督机关的代号,代号是英文大写字母。后面是一个五位数的汽车牌号,从00001~99999。当编号超过10万时,就由A、B、C等英文字母代替。
机动车辆牌照的颜色特征是:
(1)大型民用汽车使用的是黄底黑字车牌
(2)小型民用汽车使用的是蓝底白字车牌
(3)试车和临时牌使用的是白底红字车牌
(4)军队或武警专用汽车使用的是白底红字、黑字车牌
(5)领使馆外籍汽车使用的是黑底白字车牌
我国车牌规格如图1-1所示:
图1-1 车牌规格图
我国车牌实例如图1-2所示:
图1-2 车牌规格图
1.3 国内外研究现状
车牌自动识别技术的研究国外起步地较早。早在20世纪80年代,便有一些零零散散的图像处理方法用于车牌自动识别的某些具体应用。在这个阶段,车牌自动识别技术的研究还没有形成完整的系统体系,一般采用简单的图像处理方法来解决某些具体问题,并且最终结果通常需要人工干预。
进入20世纪90年代后,车牌自动识别的系统化研究开始起步。典型的如A.S.Johnson等提出车辆牌照的自动识别系统分图像分割(Image Segment)、特征提取(Feature Extraction)和模板构造(Template Formation)、字符识别(CharacterRecognition)等三个部分,完成车牌的自动识别。
R.A.Lotufo使用视觉字符识别技术(Optical Character Recognition Technology)分析所获得的图像,首先在二值化图像中找到车牌,然后用边界跟踪技术提取字符特征,再利用统计最邻近分类器(Statistical Nearest Neighbor Classifying System)与字符库中的字符比较,得出一个或几个车牌候选号码,再对这些号码进行核实检查,确定是否为该车牌号码,最终确定车牌号码。这个时期的应用在识别正确率方面有所突破,但还没有考虑识别实时性的要求,识别速度有待进一步提高。
由于我国的车牌格式和国外有较大的差异,所以对于国外的车牌识别系统的研究技术,我们只能进行参考,不能进行直接应用。虽然我国车牌的识别需要识别汉字,但是对于英文字母和数字的识别,我们可以借鉴国外的研究技术。
从80年代中期开始,ARGUS英国Alphatech公司就开始了名为RAUS的车牌自动识别系统的研制。ARGUS的车牌识别系统的识别时间约为100毫秒,通过ARGUS的车速可高达每小时100英里。还有Hi-Tech公司的See/Car system,新加坡Optasia公司的VLPRS等。另外日本、加拿大、德国等发达国家都有适用于本国的车牌识别系统。
国内在90年代也开始了自己的车牌识别系统的研究。目前比较成熟的产品有中科院自动化研究所汉王公司的汉王眼,香港亚洲视觉科技有限公司的慧光车牌号码识别系统等等。另外西安交通大学的图像处理和识别实验室、上海交通大学的计算机科学和工程系、清华大学人工智能国家重点实验室、浙江大学自动化系等都做过类似的研究。
虽然这些车牌识别系统的识别率大多都比较高,如95%,甚至97%、98%,但是这些车牌识别系统的识别检测结果大多数是在简单受限制的场景下取得的,在实际的交通场合以及更加复杂的背景环境的情况下,这些车牌识别系统的识别率一般都达不到90%,甚至更低。
1.4 车牌识别系统的简述
指能够检测到受监控路面的车辆并自动提取车辆牌照信息(含汉字字符、英文字母、阿拉伯数字及号牌颜色)进行处理的技术。车牌识别是现代智能交通系统中的重要组成部分之一,应用十分广泛。它以数字图像处理、模式识别、计算机视觉等技术为基础,对摄像机所拍摄的车辆图像或者视频序列进行分析,得到每一辆汽车唯一的车牌号码,从而完成识别过程。
1.5课题主要研究的内容
通过识别静态的含有车牌的图片,完成车牌数字自动识别的功能。功能中主要包括图像预处理、车牌定位、字符分割、字符识别等过程。利用模板匹配的方法实现自动识别数字字符的功能。
主要研究内容如下:
(1)图像预处理的研究。对图像进行灰度化,二值化以及边缘化处理。
(2)车牌定位的研究。车牌定位采用水平和垂直直方图统计的方法,将车牌从图像中定位出来。(3)字符分割的研究。先对定位好的车牌进行预处理,根据垂直方向的直方图统计方法,定位出字符的左右边界,按左右边界将字符切割出来;再根据切割出的字符定位上下界。
(4)字符识别的研究。对切割出来的字符进行细化、去噪处理,再对其进行特征提取,模板也做相应操作。利用待识别字符和模板的特征进行模板匹配,从而识别出字符。
图像输入图像预处理车牌定位字符分割字符识别
图1-3 处理流程图
2 系统的分析设计与实现
2.1 系统图像处理技术概述
汽车车牌作为车辆的唯一标识,其特征也就成为车牌识别的重要参考依据。因为车牌图像都是在室外拍摄的,所以不可避免地会受到光照、气候等因素的影响,而且拍摄者的手部抖动与车辆的移
动会造成图像的模糊。要去除这些干扰就得先对车牌图像进行预处理。由于当前数码相机的像素较高,原始图像的数据一般比较大,输入的彩色图像包含大量颜色信息,会占用较多的存储空间,且处理时也会降低系统的执行速度。因此对图像进行识别等处理时,常将彩色图像转换为灰度图像,以加快处理速度。对图像进行灰度化处理后常用的方法是图像二值化、去除背景图像、增强处理、边缘检测、滤波等处理等。
(1)图像灰度化
拍摄到的彩色车辆图像包含大量的颜色信息,不仅仅在存储上严重占用资源,并且在运算处理上也会大大降低系统工作效率,所以在对图像进行识别中首先要做的就是将彩色图像转变为灰度图像,RGB模型中,如果R=G=B时,则彩色表示一种灰度颜色,其中R=G=B的值叫灰度值,因此,灰度图像每个像素只需一个字节存放灰度值由于灰度图像每个像素只需一个字节存放灰度值,从而降低存储资源的占用,提高系统的运算效率。灰度化处理方法主要有以下三种:
最大值法:使R,G,B的值等于三值中最大的一个
R=G=B=max(R,G,B)
平均值法:求出每个像素点的R、G、B三个分量的平均值,然后将这个平均值赋予给这个像素的三个分量。
R=G=B=(R+G+B)/3
加权值法:根据YUV的颜色空间中,Y的分量的物理意义是点的亮度,由该值反映亮度等级,根据RGB和YUV颜色空间的变化关系可建立亮度Y与R、G、B三个颜色分量的对应,以这个亮度值表达图像的灰度值。
Y=0.3R+0.59G+0.11B
(2)图像边缘化检测
不同图像灰度不同,边界处一般会有明显的边缘,利用此特征可以更加准确得检测到车牌轮廓从而对车牌进行定位,本系统采用Canny算子实现,Canny算子是一个具有滤波,增强,检测的多阶段的优化算子,在进行处理前,Canny算子先利用高斯平滑滤波器来平滑图像以除去噪声,Canny 分割算法采用一阶偏导的有限差分来计算梯度幅值和方向,在处理过程中,Canny算子还将经过一个非极大值抑制的过程,最后Canny算子还采用两个阈值来连接边缘。
Canny边缘检测算法:
用高斯滤波器平滑图象;
用一阶偏导的有限差分来计算梯度的幅值和方向;
对梯度幅值进行非极大值抑制;
用双阈值算法检测和连接边缘。
(3)图像的二值化
为了进一步使图像变得简单,减小容量,更加明显地显示出车牌的轮廓,就需要对原先灰度化的图像进行二值化处理,二值化就是将图像上的点的灰度设置为0或255,使整个图像呈现出黑白效果,即将图像上的将256个亮度等级的灰度图像通过适当的阀值选取而获得可以反映图像整体和局部特征的二值化图像。为了得到理想的二值图像,一般采用封闭、连通的边界定义不交叠的区域。所有灰度大于或等于阀值的像素被判定为属于特定物体,其灰度值为255表示,否则这些像素点被排除在物体区域以外,灰度值为0,表示背景或者例外的物体区域。如果某特定物体在内部有均匀一致的灰度值,并且其处在一个具有其他等级灰度值的均匀背景下,使用阀值法就可以得到比较的分割效果。如果物体同背景的差别表现不在灰度值上(比如纹理不同),可以将这个差别特征转换为灰度的差别,然后利用阀值选取技术来分割该图像。动态调节阀值实现图像的二值化可动态观察其分割图像的具体结果。
在二值化过程中,阀值的选取是最为重要的问题,本系统运用的是全局阀值法Ostu。Otsu法即最大类间方差法,该方法由Otsu于1979年提出,所以又称Otsu二值化方法,是一种经典的全局阈
值法。这种二值化阈值选取算法比较简单,所以得到广泛的应用。Otsu 方法的基本思想是对像素进行划分,使划分得到的各类之间的距离达到最大来确定最合适的阈值。该方法对于目标和背景明显分离、直方图分布呈双峰的图像效果良好,适用于车牌识别系统中的图像预处理。
2.2 系统的流程图
该流程图为系统流程图,主要是描述系统整个运行过程,包括系统的主要模块,这样用户就能够通过流程图查看系统的执行过程,对系统也能够进一步的了解。
图2-1 系统流程图
判断文件
N N 错误提示 开始
选择图片 灰度化处理 二值化处理
车牌定位
字符分割 载入图片 找到车牌 字符识别 结果显示 结束 Y Y
3 系统的软件设计
3.1 Qt 平台的介绍
Qt 是一个跨平台C++图形用户界面应用程序开发框架。它既可以开发GUI 程序,也可用于开发非GUI 程序,比如控制台工具和服务器。Qt 是面向对象的框架,使用特殊的代码生成扩展(称为元对象编译器(Meta Object Compiler, moc ))以及一些宏,易于扩展,允许组件编程。
本系统是在Qt creator 下进行开发的,Qt Creator 包括项目生成向导、高级的 C++ 代码编辑器、浏览文件及类的工具、集成了Qt Designer 、Qt Assistant 、Qt Linguis t 、图形化的 GDB 调试前端,集成 qmake 构建工具等。
3.2 OpenCV 的介绍
系统采用的是OpenCV 视觉库,OpenCV 是一个基于(开源)发行的跨平台计算机视觉库,可以运行在Linux 、Windows 和Mac OS 操作系统上。它轻量级而且高效——由一系列 C 函数和少量 C++ 类构成,同时提供了Python 、Ruby 、MATLAB 等语言的接口,实现了图像处理和计算机视觉方面的很多通用算法。
OpenCV 主要分为四大模块,如图3-1所示。OpenCV 的CV 模块包含基本的图像处理函数和高级的计算机视觉算法。ML 是机器学习库,包含一些基于统计和聚类工具。HighGUI 包含图像和视频输入/输出的函数。CXCore 包含OpenCV 的一些基本数据结构和相关函数。
图3-1 系统流程图
3.3 配置OpenCV 的Qt 开发环境
(1)安装好Qtcreator 、OpenCV 以及CMaker (默认安装C 盘); (2)将C:\Qt\Qt5.0.1\Tools\MinGW\bin 加入系统的Path 环境变量; (3)使用CMaker 编译OpenCV 并生成makefile 文件;
(4)打开cmd ,进入目标路径(C :\OpenCV ),输入mingw32-make 命令开始编译。
(5)拷贝OpenCV-2.4.4安装目录下的build/include 目录,MinGW 编译后的bin 目录以及CMake 目标路径下,MinGW 编译后的lib 目录到同一目录,并将bin 目录添加到系统环境变量path 中;
(6)打开Qt Creator ,新建一个空工程,然后添加一个cpp 文件,任意命名,在pro 文件中添加如下OpenCV 的依赖文件
INCLUDEPATH+=C:\OpenCV\include\opencv\ C:\OpenCV\include\opencv2\ C:\OpenCV\include
LIBS+= C:\OpenCV\lib\libopencv_calib3d244.dll.a\
CV 图像处理和视觉算法 MLL 统计分类器 HighGUI GUI 图像和视频输入/输出 CXCORE
基本结构算法,XML 支持,绘图函数
C:\OpenCV\lib\libopencv_contrib244.dll.a\
C:\OpenCV\lib\libopencv_core244.dll.a\
C:\OpenCV\lib\libopencv_features2d244.dll.a\
C:\OpenCV\lib\libopencv_flann244.dll.a\
C:\OpenCV\lib\libopencv_gpu244.dll.a\
C:\OpenCV\lib\libopencv_highgui244.dll.a\
C:\OpenCV\lib\libopencv_imgproc244.dll.a\
C:\OpenCV\lib\libopencv_legacy244.dll.a\
C:\OpenCV\lib\libopencv_ml244.dll.a\
C:\OpenCV\lib\libopencv_objdetect244.dll.a\
C:\OpenCV\lib\libopencv_video244.dll.a
3.4 车牌识别系统的功能模块划分和实现
3.4.1 图片读取模块
读取用户选择含有车牌信息图片(*.jpg *.bmp *.gif *.png)的磁盘路径,根据路径载入图片,并将读取出来的图片提供给后续模块。
3.4.2 图片灰度化模块
通过获取像素GBG,使用cvCvtColor函数加权值法将图像进行灰度化处理,然后将绘制的灰度化图片用cvSmooth函数通过高斯滤波(CV_GAUSSIAN)进行去噪,平滑处理。并将绘制后的图片提供给后续模块。
图3-2 图像原图
图3-3 灰度化图片
图3-4 平滑处理图片
3.4.3 图片二值化模块
使用cvThreshold函数的Otsu算法将原图分成前景,背景两个图像,通过衡量背景与前景的差别值,运用最大类间方差选取最佳阀值对图像进行二值化处理,并将绘制好图片传给下一模块。
图3-5 二值化处理图片
3.4.4 车牌定位模块
首先对二值化后的图像进行行扫描和列扫描,从而得到车牌区域。接下来找出每行的非零像素值的个数统计出来存储在数组中,最后通过投影统计出所有的图像像素,并保存投影数值和最大的。对保存的数值判断,如果满足要求这样就找出了车牌上水平线,同样的方法找出下水平线。
车牌左右边界寻找方法跟上段叙述的上下水平线方法相似,变成纵向扫描统计像素个数,然后进一步确定。在此过程中统计列非零像素并找出最大连续统计,这值是车牌左边界,区域右边界同理可得。然后使用OpenCV的功能函数在此区域设置感兴趣的块,最后截取出车牌区域。
图3-6 车牌定位图片
3.4.5 字符分割模块
首先要对车牌字符进行定位,因为在车牌里第二个字符和第三个字符中间会有一个白色的小点,在切割过程中会对识别造成干扰,所以首先要对车牌进行第一次垂直投影,定位在第二个字符和第三个字符中间,确定第二个字符的边界位置和第三个字符的起点位置,这样就可以将车牌分成两个部分,然后再次进行垂直投影通过阀值来确定分割的大小和位置。
分割完成后,再对分割的图片进行角点处理,点角集中了图像上的重要形状信息,能够是提高图片特征和边缘化程度,从而提高字符识别的精度和准确度,处理完成后绘制好分割的图像,传给下一模块。
图3-7 车牌分割图片
3.4.6 字符识别模块
本系统使用KNN算法实现字符识别,KNN算法的核心思想是如果一个样本在特征空间中的k 个最相邻的样本中的大多数属于某一个类别,则该样本也属于这个类别,并具有这个类别上样本的特性。KNN算法实现步骤:
(1)初始化距离为最大值;
(2)计算位置样本和每个训练样本的距离dist;
(3)得到目前K个最临近样本中的最大距离maxdist;
(4)如果dist小于maxdist,则将该训练样本作为K最近邻样本;
(5)重复上述3个步骤,直到未知样本和所有训练样本的距离都算完;
(6)统计K个最邻近样本中每个类别出现的次数;
(7)选择出频率最大的类别作为未知样本的类别。
4 系统测试
(1)训练样本
图4-1 训练样本
图4-2 训练样本
图4-3 训练样本(2)开启界面
图4-4 开启界面
(3)程序主界面
图4-5 程序主界面(4)图片选取
图4-6 图片选取
(5)图像识别
图4-7 图像识别
5 系统结果分析与展望
通过几个月的学习与实践,顺利完成了毕业设计,在刚开始接触到这个题目的时候脑海中并没有具体思路,车牌识别系统涉及到了非常多的图像方面有关的专业知识,这些都是我在之前并未接触过的,很多专业知识我必须从头开始一步步的去了解和深入,我通过上网、图书馆查阅资料以及吴老师的指导之下,分析和研究,解决了很多难题。
车牌识别系统是一个实际的工程系统,要求实时性高和一定的准确率,由于实际生活中采集到的图像受到到大量随机的环境干扰,以及拍摄角度的影响使得车牌区域会有各样的形状以及色差的无规则变化,同时每张图片的质量以及清晰度也不一样,给车牌识别带来了一定难度,所以要求系统能够在这样的条件下也能够准确识别,设计的过程中使用了二值化,边缘检测,中值滤波等图像处理方法,而每一种处理方法又可以用不同的算法去实现,算法的选择对最后的识别结果是至关重要的,如对图像进行二值化,算法非常的多,有双峰法,P参数法,迭代法和OTSU法等,所以就要对不同的算法进行测试,选择出最适合进行车牌识别的算法,这样就能提高识别的准确度,同时本系统最后一个字符识别的模块是一个难点,试用了多种方法准确率都非常的低,最后通过上网查阅资料,选择了KNN邻近算法进行字符识别,提高了识别的准确率及精度。
系统完成后因为各方面原因,所以系统还并不完善,还有待于从以下几个方面进一步去完善和提高。
(1)对于倾斜度较高的车牌校正有待进一步去研究。
(2)在识别过程中可以综合多种算法综合对图像进行处理,提高识别的抗干扰能力和识别的准确率。
(3)对图片的质量,车牌位置要求进一步降低,提高应用面。
参考文献
[1](加)布兰切特,(英)萨默菲尔德著,闫锋欣译,《C++ GUI Qt 4编程(第二版)》,电子工业出版社,2013-5-1
[2] 李彬,《Linux Qt GUI开发详解--基于Nokia Qt SDK》,北京航空航天大学出版社,2013-1-1
[3] 韩少云,奚海蛟,谌利,《基于嵌入式Linux的Qt图形程序实战开发》,北京航空航天大学出版社,2012-10-1
[4] (美)李普曼,(美)拉乔伊,(美)默著,王刚,杨巨峰译,《C++ Primer中文版(第5 版)》,电子工业出版社,2013-9-1
[5] 霍亚飞,《Qt Creator快速入门》,北京航空航天大学出版社,2014-1-1
[6] 霍亚飞,《Qt及Qt Quick开发实战精解》,北京航空航天大学出版社,2012-5-1
[7] 贾云得.计算机视觉.[M].北京:科学出版社.2000
[8] 李现勇.Visual C++串口通信技术与工程实践[M].人民邮电出版社.2004
[9] 杨海清,周安栋,罗勇,陈牧.嵌入式系统实时网络通信中的LCD显示设计方法[J].计算机
与数字工程.2010年02期
[10] 刘瑞祯,于仕琪.OpenCV 教程基础篇[M].北京:北京航空航天大学出版社,2007.
[11] 刘静.几种车牌字符识别算法的比较[J] .电脑与电信,2008,8(4):72-78.
[12] 吴进军,杜树新.车牌字符分割新方法[J].工业控制计算机,2005,8(4):69-75.
[13] 宋晨光,叶海建.基于数字形态学的车牌字符分割算法光电子技术与[J] .Dee18(6)2005.
[14] 陈黎等.基于聚类分析的车牌字符分割方法[J].计算机工程与应用.2002,6:221-223.
[15] 王春,刘波,周新志.采用BP 神经网络的车牌字符识别方法研究[J].中国测试技术,2005,31(l):26-28.
[16] 陈贤青.基于计算机视觉的车牌定位研究[D].学位论文.2007.
[17] 姚蕾.车牌识别系统的软件设计与实现[D].硕士学位论文.上海交通大学.2009.
[18] 吴晓阳.基于OpenCV的运动目标检测与跟踪[D].硕士学位论文.浙江大学.2008.
[19] 陈胜勇,刘盛.基于OpenCV 的计算机视觉技术实现[M].北京:科学出版社,2008:5-1.
[20] Matthew MacDonald. Beginning https://www.doczj.com/doc/b02525325.html, 4.0 in C# 2010[M]. Apress, 2010.
[21] Jeff Cogswell, John Paul Mueller. C++ All-In-One Desk Reference For Dummies [M]. Wiley publishing.Inc 2009.
[22] Alan Beaulieu. Learning SQLO'Reilly Series[M]. O'Reilly Mdia, Inc., 2009.
[23] Thomas M.Connolly,Carolyn E. Begg. Database systems: a practical approach to design, implementation, and management[M]. Addison-Wesley, 2009.
[24] Abraham Silberschatz, Henry F. Korth, S. Sudar she an. Database System Concepts[M]. McGraw-Hill, 2010.
[25] Peter Rob, Carlos Coronel .Database Systems[M]. Cengage Learning EMEA, 2008.
[26] Eun Ryung Lee, Pyeoung Kee King: Automatic recognition of a car license plate using color image processing[C]. Journal of Korea Institute of Telematics and Electronics: FEB, 1995, 128-131. [27] R.Parisi, E.D.Di Claudio: Car plate recognition by neural networks and image processing[C].
IEEE Transaction on Vehicular Technology: APR, 1998, 790-799.
致谢
我要感谢学院能够给我们提供这样一个良好的学习环境,同时也提供了非常丰富的资源让我们去学习和成长。我要感谢所有计算机工程学院的老师对我的培养和关怀。在这次的毕业设计中,论
文指导老师吴老师对我进行了悉心的指导,为我提供了很多帮助,在我遇到困惑的时候能够给予最专业的帮助及指导也指明了论文研究的方向,老师严谨治学态度也深深影响了我。
通过这次的毕业设计,不仅让我巩固了大学所学知识,同时也让我对图像处理这一门科学产生了浓厚的兴趣和爱好,增强了我的自学能力,动手能力,更加能够适应以后的学习,也为进入社会打下了基础。
最后感谢毕业设计过程中帮过我的所有人,正是因为有老师和同学们的耐心帮助,我才能顺利完成毕业设计,提高自身能力。
附录
Pro文件:
QT += core gui
QT +=webkit webkitwidgets network
greaterThan(QT_MAJOR_VERSION, 4): QT += widgets
TARGET = test
TEMPLATE = app
INCLUDEPATH+=D:\Qt\opencv\include\opencv2\
D:\Qt\opencv\include\opencv\
D:\Qt\opencv\include
LIBS += D:\Qt\opencv\lib\libopencv_calib3d249.dll.a\ D:\Qt\opencv\lib\libopencv_contrib249.dll.a\
D:\Qt\opencv\lib\libopencv_core249.dll.a\
D:\Qt\opencv\lib\libopencv_features2d249.dll.a\
D:\Qt\opencv\lib\libopencv_flann249.dll.a\
D:\Qt\opencv\lib\libopencv_gpu249.dll.a\
D:\Qt\opencv\lib\libopencv_highgui249.dll.a\
D:\Qt\opencv\lib\libopencv_imgproc249.dll.a\
D:\Qt\opencv\lib\libopencv_legacy249.dll.a\
D:\Qt\opencv\lib\libopencv_ml249.dll.a\
D:\Qt\opencv\lib\libopencv_objdetect249.dll.a\
D:\Qt\opencv\lib\libopencv_video249.dll.a
SOURCES += main.cpp \
mainwindow.cpp \
yplaterec.cpp
HEADERS += \
mainwindow.h \
yplaterec.h
字符识别:
cvSetZero(m_pImgCharOne);
cvSetZero(m_pImgCharTwo);
cvSetZero(m_pImgCharThree);
cvSetZero(m_pImgCharFour);
cvSetZero(m_pImgCharFive);
cvSetZero(m_pImgCharSix);
cvSetZero(m_pImgCharSeven);
CvRect ROI_rect1;
ROI_rect1.x=0.5*(letter[1]+letter[0])-10;
ROI_rect1.y=0;
ROI_rect1.width=20;
ROI_rect1.height=40;
cvSetImageROI(m_ImgROIBinary,ROI_rect1);
cvCopy(m_ImgROIBinary,m_pImgCharOne,NULL); //获取第1个字符cvResetImageROI(m_ImgROIBinary);
ROI_rect1.x=0.5*(letter[3]+letter[2])-10;
ROI_rect1.y=0;
ROI_rect1.width=20;
ROI_rect1.height=40;
{
cvSetImageROI(m_ImgROIBinary,ROI_rect1);
cvCopy(m_ImgROIBinary,m_pImgCharTwo); //获取第2个字符
cvResetImageROI(m_ImgROIBinary);
}
ROI_rect1.x=0.5*(letter[5]+letter[4])-10;
ROI_rect1.y=0;
ROI_rect1.width=20;
ROI_rect1.height=40;
{
cvSetImageROI(m_ImgROIBinary,ROI_rect1);
cvCopy(m_ImgROIBinary,m_pImgCharThree,NULL); //获取第3个字符cvResetImageROI(m_ImgROIBinary);
}
ROI_rect1.x=0.5*(letter[7]+letter[6])-10;
ROI_rect1.y=0;
ROI_rect1.width=20;
ROI_rect1.height=40;
{
cvSetImageROI(m_ImgROIBinary,ROI_rect1);
cvCopy(m_ImgROIBinary,m_pImgCharFour,NULL); //获取第4个字符cvResetImageROI(m_ImgROIBinary);
}
ROI_rect1.x=0.5*(letter[9]+letter[8])-10;
ROI_rect1.y=0;
ROI_rect1.width=20;
ROI_rect1.height=40;
{
cvSetImageROI(m_ImgROIBinary,ROI_rect1);
cvCopy(m_ImgROIBinary,m_pImgCharFive,NULL); //获取第5个字符
cvResetImageROI(m_ImgROIBinary);
}
ROI_rect1.x=0.5*(letter[11]+letter[10])-10;
ROI_rect1.y=0;
ROI_rect1.width=20;
ROI_rect1.height=40;
{
cvSetImageROI(m_ImgROIBinary,ROI_rect1);
cvCopy(m_ImgROIBinary,m_pImgCharSix,NULL); //获取第6个字符
cvResetImageROI(m_ImgROIBinary);
}
ROI_rect1.x=0.5*(letter[13]+letter[12])-10;
ROI_rect1.y=0;
ROI_rect1.width=20;
ROI_rect1.height=40;
{
cvSetImageROI(m_ImgROIBinary,ROI_rect1);
cvCopy(m_ImgROIBinary,m_pImgCharSeven,NULL); //获取第7个字符
cvResetImageROI(m_ImgROIBinary);
}
cvReleaseImage(&m_ImgROIBinary);
// 释放内存
delete []num_h;
num_h=NULL;
}
bool YPlateRec::startPlateRec(IplImage *img)
{
m_pImgCanny=cvCreateImage(cvSize(img->width,img->height),IPL_DEPTH_8U,1); // 2值化后图片大小初始化
if(m_pImgCanny)
{
cvCvtColor(img,m_pImgCanny,CV_RGB2GRAY); //转化为灰度图openCV函数Y = 0.299*R + 0.587*G + 0.114*B
cvSmooth(m_pImgCanny,m_pImgCanny,CV_GAUSSIAN,3,0,0); //平滑高斯滤波滤波后的图片保存在pImgCanny
Threshold(m_pImgCanny,m_pImgCanny);
m_pImgThrehold = cvCreateImage(cvGetSize(m_pImgCanny),IPL_DEPTH_8U,1);
cvCopy(m_pImgCanny,m_pImgThrehold);
if(PlateAreaSearch(m_pImgCanny)==0)
return false; // 车牌定位
}
SegmentPlate();
}
if(!m_pImgCharOne || !m_pImgCharTwo || !m_pImgCharThree
|| !m_pImgCharFour || !m_pImgCharFive || !m_pImgCharSix
|| !m_pImgCharSeven)
{
return false;
}
return true;
}
QString YPlateRec::CodeRecognize(IplImage *imgTest, int num)
{
QString x;
x.append("*");
if(imgTest==NULL)
{
return x;
}
x.clear();
CvMat* currentVector = cvCreateMat(1, 800, CV_32FC1);
CvMat* currentLabel = cvCreateMat(1, 1, CV_32FC1);
int n,m;
for(n=0;n<40;n++)
{
for(m=0;m<20;m++)
{
currentVector->data.fl[20*n+m] = CV_IMAGE_ELEM(imgTest,uchar,n,m);
}
}
switch(num)
{
case 1: //汉字
{
m_Chineseknn.find_nearest(currentVector,5,currentLabel);
int offset = currentLabel->data.fl[0];
x.append(m_chinese[offset]);
cvReleaseMat(¤tVector);
cvReleaseMat(¤tLabel);
break;
停车场管理系统自动车牌识别计费系统技术方案
目录 1 企业概况 (4) 1.1 公司简介 (4) 1.2 资质证书 (4) 2 概述 (10) 2.1 系统方案总体设计 (10) 2.2 项目背景 (11) 2.3 方案概述 (12) 3 系统介绍 (14) 3.1 车牌识别系统简介 (14) 3.2 系统优势 (15) 3.3 系统组成 (16) 4 主要设备参数性能介绍 (19) 4.1 CA-AB900道闸 (19) 4.2 INEX- TI200 200万高清识别一体机 (20) 4.3 CA-600读卡控制器 (22) 技术参数: (22) 4.4 软件监控界面 (23) 4.5 其他辅件 (23)
5 售后服务 (24) 5.1 保修时间及范围 (24) 5.2 维修及维护服务 (24) 5.3 更新改进服务 (24) 5.4 客户档案,完善产品质量 (25) 6 部分工程案例 (26)
1企业概况 1.1公司简介 北京市仟安科技有限责任公司是设计、研发、生产、销售、服务为一体的高新技术企业。公司凝聚了大批实力雄厚的研发团队和技术团队,凭着对智能化应用领域多年来的积淀和对未来智能化领域发展的导向,为用户提供有价值的产品和服务。 公司经过多年的开发研究,引进国外最先进的高新技术,不断完善自我。主要研发停车场主板软件、生产智能道闸、停车场收费系统、车位引导系统、派车系统、门禁系统、自动检售票系统等安防权限认证、消费认证产品。仟安的智能系统解决方案也已得到客户的全面认可和好评。经国家技术监督部门检验、产品的技术含量及外光造型已达到世界先进水平。现“仟安”产品已遍布全国各大城市及地区,并已成功销往海外。 公司以“冲破束缚,发展无限”为企业宗旨,积极引领核心技术创新,不断为全球用户创造完美产品。逐渐形成了“开拓、创新、共赢、务实”的企业文化,建立了朝气蓬勃的精英团队。 公司自创建以来,一直保持了高速发展态势,现已成为国内停车场系统服务领域的领跑者,致力于成为中国领先的安防服务品牌。 1.2资质证书
车牌识别系统的设计 1.摘要: 汽车牌照自动识别系统是制约道路交通智能化的重要因素,包括车牌定位、字符分割和字符识别三个主要部分。本文首先确定车辆牌照在原始图像中的水平位置和垂直位置,从而定位车辆牌照,然后采用局部投影进行字符分割。在字符识别部分,提出了在无特征提取情况下基于支持向量机的车牌字符识别方法。实验结果表明,本文提出的方法具有良好的识别性能。随着公路逐渐普及,我国的公路交通事业发展迅速,所以人工管理方式已经不能满着实际的需要,微电子、通信和计算机技术在交通领域的应用极大地提高了交通管理效率。汽车牌照的自动识别技术已经得到了广泛应用。 2.设计目的: 1、使学生在巩固理论课上知识的同时,加强实践能力的提高,理论联系实践。 2、激发学生的研究潜能,提高学生的协作精神,锻炼学生的动手能力。 3.设计原理 由于车辆牌照是机动车唯一的管理标识符号,在交通管理中具有不可替代的作用,因此车辆牌照识别系统应具有很高的识别正确率,对环境光照条件、拍摄位置和车辆行驶速度等因素的影响应有较大的容阈,并且要求满足实时性要求。 图1 牌照识别系统原理图 该系统是计算机图像处理与字符识别技术在智能化交通管理系统中的应用,它主要由图像的采集和预处理、牌照区域的定位和提取、牌照字符的分割和识别等几个部分组成,如图1 所示。其基本工作过程如下: (1)当行驶的车辆经过时,触发埋设在固定位置的传感器,系统被唤醒处于工作状态;一旦连接摄像头光快门的光电传感器被触发,设置在车辆前方、后方和侧面的相机同时拍摄下车辆图像;
(2)由摄像机或CCD 摄像头拍摄的含有车辆牌照的图像通视频卡输入计算机进行预处理,图像预处理包括图像转换、图像增强、滤波和水平较正等; (3)由检索模块进行牌照搜索与检测,定位并分割出包含牌照字符号码的矩形区域; (4)对牌照字符进行二值化并分割出单个字符,经归一化后输入字符识别系统进行识别。4.详细设计步骤 4.1 提出总体设计方案。 车辆牌照识别整个系统主要是由车牌定位和字符识别两部分组成,其中车牌定位又可以分为图像预处理及边缘提取模块和牌照的定位及分割模块;字符识别可以分为字符分割与特征提取和单个字符识别两个模块。 为了用于牌照的分割和牌照字符的识别,原始图象应具有适当的亮度,较大的对比度和清晰可辩的牌照图象。但由于该系统的摄像部分工作于开放的户外环境,加之车辆牌照的整洁度、自然光照条件、拍摄时摄像机与牌照的矩离和角度以及车辆行驶速度等因素的影响,牌照图象可能出现模糊、歪斜和缺损等严重缺陷,因此需要对原始图象进行识别前的预处理。 牌照的定位和分割是牌照识别系统的关键技术之一,其主要目的是在经图象预处理后的原始灰度图象中确定牌照的具体位置,并将包含牌照字符的一块子图象从整个图象中分割出来,供字符识别子系统识别之用,分割的准确与否直接关系到整个牌照字符识别系统的识别率。 由于拍摄时的光照条件、牌照的整洁程度的影响,和摄像机的焦距调整、镜头的光学畸变所产生的噪声都会不同程度地造成牌照字符的边界模糊、细节不清、笔划断开或粗细不均,加上牌照上的污斑等缺陷,致使字符提取困难,进而影响字符识别的准确性。 因此,需要对字符在识别之前再进行一次针对性的处理。 车牌识别的最终目的就是对车牌上的文字进行识别。主要应用的为模板匹配方法。 因为系统运行的过程中,主要进行的都是图像处理,在这个过程中要进行大量的数据处理,所以处理器和内存要求比较高,CPU要求主频在600HZ及以上,内存在128MB及以上。 系统可以运行于Windows98、Windows2000或者Windows XP操作系统下,程序调试时使用matlab。 4.2 预处理及边缘提取
车牌识别系统设计方案
目录 一、方案设计依据 (3) 二、车牌识别技术说明 (3) 三、车牌识别停车管理系统 (4) 1、项目背景 (4) 2、系统配置及操作流程 (9) 3、布线说明 (13) 4、车辆分类 (13) 5、车牌识别系统设备说明 (14) 6、安装要求 (22) 7、管理软件简单介绍 (23) 四、工程实施 (29) 1、现场施工管理 (29) 2、施工人员组织构架 (29) 3、工程执行流程图 (29) 4、施工进度计划及保障措施 (29)
一、方案设计依据 《智能建筑设计标准》GB/T 50314-2000 《建筑与建筑群综合布线系统工程设计规范》GBT/T 50311-2000 《建筑与建筑群综合布线系统工程施工及验收规范》GBT/T 50312-2000 《建筑物防雷设计规范》GB 50057-2000 《安全防范工程技术规范》GB 50348 2004 《安全防范工程程序与要求》GA/T 75-94 《安全防范工程费用预算编制办法》GA/T70-2004 《交通设施系统建设标准》交通部 《计算机软件工程规范国家标准汇编》2003 上海红门智能企业标准 工程现场图纸及用户要求 二、车牌识别技术说明 车牌识别技术(Vehicle License Plate Recognition,VLPR)以计算机技术、图像处理技术、模糊识别为基础,建立车辆的特征模型,识别车辆特征,如号牌、车型、颜色等。它是一个以特定目标为对象的专用计算机视觉系统,能从动态视频或静态图像中对车牌定位、自动提取车牌图像,自动分割字符,进而对字符进行识别,它运用先进的图像处理、模式识别和人工智能技术,对采集到的图像信息进行处理,能够实时准确地自动识别出车牌的数字、字母及汉字字符。使得车牌识别技术对于维护交通安全和城市治安,防止交通堵塞,实现交通自动化管理有着现实的意义。
深圳市罗拉智能科技有限公司 车牌自动识别一体机 技 术 方 案 市罗拉智能科技
目录 第一章系统介绍............................................................................................................................................ - 2 -1.1)系统概述........................................................................................................................................ - 2 -1.2)系统特性........................................................................................................................................ - 2 -1.3)解决问题........................................................................................................................................ - 3 -1.4)功能模块........................................................................................................................................ - 4 -1.5)总体设计........................................................................................................................................ - 6 -1.6)设计依据........................................................................................................................................ - 6 -1.7)系统优势........................................................................................................................................ - 7 -1.8)系统拓扑图.................................................................................................................................... - 8 -1.9)产品细节鉴赏..................................................................................................... 错误!未定义书签。 1.10)系统安装方式................................................................................................................................ - 9 -1.11)系统进出场流程图...................................................................................................................... - 13 -1.12)项目车道布设图.......................................................................................................................... - 16 -1.13)项目方案设计效果图......................................................................................... 错误!未定义书签。 1.14)系统功能概述.............................................................................................................................. - 18 -1.15)系统进出场流程图.. (21) 1.16)用户使用 (22) 1.17)图像对比 (22) 1.18)系统管理软件 (23) 第二章主要设备介绍 (24) 2.1)车牌识别一体机 (24) 2.2)专用LED补光灯 (27) 2.3)18寸防护罩 (28) 2.4)镜头 (29) 2.5)快速道闸 (30) 2.6)道闸车辆检测器 (31) 2.7)车道信息显示屏 (32)
车牌识别系统的设计 一、摘要: 随这图形图像技术的发展,现在的车牌识别技术准确率越来越高,识别速度越来越快。无论何种形式的车牌识别系统,它们都是由触发、图像采集、图像识别模块、辅助光源和通信模块组成的。车牌识别系统涉及光学、电器、电子控制、数字图像处理、计算视觉、人工智能等多项技术。触发模块负责在车辆到达合适位置时,给出触发信号,控制抓拍。辅助光源提供辅助照明,保证系统在不同的光照条件下都能拍摄到高质量的图像。图像预处理程序对抓拍的图像进行处理,去除噪声,并进行参数调整。然后通过车牌定位、字符识别,最后将识别结果输出。 二、设计目的和意义: 设计目的: 1、让学生巩固理论课上所学的知识,理论联系实践。 2、锻炼学生的动手能力,激发学生的研究潜能,提高学生的协作精神。 设计意义: 车牌定位系统的目的在于正确获取整个图像中车牌的区域,并识别出车牌号。通过设计实现车牌识别系统,能够提高学生分析问题和解决问题的能力,还能培养一定的科研能力。 三、设计原理: 牌照自动识别是一项利用车辆的动态视频或静态图像进行牌照号码、牌照颜色自动识别的模式识别技术。其硬件基础一般包括触发设备、摄像设备、照明设备、图像采集设备、识别车牌号码的处理机等,其软件核心包括车牌定位算法、车牌字符分割算法和光学字符识别算法等。某些牌照识别系统还具有通过视频图像判断车辆驶入视野的功能称之为视频车辆检测。一个完整的牌照识别系统应包括车辆检测、图像采集、牌照识别等几部分。当车辆检测部分检测到车辆到达时触发图像采集单元,采集当前的视频图像。牌照识别单元对图像进行处理,定位出牌照位置,再将牌照中的字符分割出来进行识别,然后组成牌照号码输出。 四、详细设计步骤:
PA-WT车牌识别 停 车 场 管 理 系 统 方 案
目录 第一章前言................................ 错误!未定义书签。第二章系统设计依据及总则..................... 错误!未定义书签。 一、本方案设计依据:........................ 错误!未定义书签。 二、设计说明................................ 错误!未定义书签。 1、设计目标及原则........................ 错误!未定义书签。 2、系统概述 (2) 3、系统基本功能及特点 (5) 系统结构框图 (6) 图像识别系统主要设备 (7) 4 出口处电脑功能......................... 错误!未定义书签。 5 管理电脑功能 (11) 三.系统软件功能 (11) 第三章系统设计 (12) 注意事项 (13) 第四章售后服务 (14)
前言: 车牌识别技术是指能够检测到受监控路面的车辆并自动提取车辆牌照信息(含汉字字符、英文字母、阿拉伯数字及号牌颜色)进行处理的技术。车牌识别是现代智能交通系统中的重要组成部分之一,应用十分广泛。它以数字图像处理、模式识别、计算机视觉等技术为基础,对摄像机所拍摄的车辆图像或者视频序列进行分析,得到每一辆汽车唯一的车牌号码,从而完成识别过程。通过一些后续处理手段可以实现停车场收费管理,交通流量控制指标测量,车辆定位,汽车防盗,高速公路超速自动化监管、闯红灯电子警察、公路收费站等等功能。对于维护交通安全和城市治安,防止交通堵塞,实现交通自动化管理有着现实的意义。 目前国内有两种识别方式,1、软件识别,就是摄像机直接接入PC机,通过电脑上位机软件对摄像机抓拍图片进行分析识别,优点成本低,缺点:对电脑要求较高,长时间运行识别速度会有一定影响。2、DSP嵌入式硬件识别,摄像机直接接入DSP嵌入式车牌识别器,通过专业的DSP芯片对摄像机抓拍图片进行分析,优点:对电脑要求低,设备自带防死机功能,算法丰富,识别速度快,适用于工业环境长时间运行。缺点:成本相对于软识别成本较高。 系统简介 我司采用DSP嵌入式硬件图像处理器研制开发的PA-WT汽车牌照自动识别车辆出入管理系统,具有方便快捷、准确可靠、保密性好、灵敏度高、节省
汽车号牌识别系统设计 ** 中文摘要:随着二十一世纪到来,经济快速发展和人们生活水平显著提高,汽车逐渐成为家庭的主要交 通工具。汽车的产量快速增多,车辆流动也变得越来越频繁,因此给交通带来了严重问题,如交通堵塞、交通事故等,智能交通系统(Intelligent Transportation System)的产生就是为了从根本上解决交通问题。在智能交通系统中车牌识别技术占有重要位置,车牌识别技术的推广普及必将对加强道路管理、城市交通事故、违章停车、处理车辆被盗案件、保障社会稳定等方面产生重大而深远的影响。 该设计主要研究基于MATLAB 软件的汽车号牌设别系统设计,系统主要包括图像采集、图像预处理、车牌定位、字符分割、字符识别五大核心部分。系统的图像预处理模块是将图像经过图像灰度化、图像增强、边缘提取、二值化等操作,转换成便于车牌定位的二值化图像;利用车牌的边缘、形状等特征,再结合Roberts 算子边缘检测、数字图像、形态学等技术对车牌进行定位;字符的分割采用的方法是将二值化后的车牌部分进行寻找连续有文字的块,若长度大于设定的阈值则切割,从而完成字符的分割;字符识别运用模板匹配算法完成。以上每个功能模块用MATLAB 软件实现,最后识别出车牌,在研究设计的同时对其中出现的问题进行具体分析、处理,并寻求更优的方法。 关键词:MATLAB ,车牌识别系统,字符识别,图像处理 一、总体设计 汽车号牌识别系统技术是从一幅车辆图像中准确定位出车牌区域,然后经过字符切割和字符识别来实现车辆牌照的自动识别。主要流程图如下: 图1.1 二、总体功能模块 基于MA TLAB 车牌识别系统主要包括图像采集、图像预处理、车牌定位、字符分割、字符识别五个关键环节[11],其基本工作如下: (1) 图像采集:使用摄像头、照相机拍摄采集图像。 读取图片 图像预处理 车牌定位 字符分割 模板库 字符识别
HBJ车牌识别管理系统 技 术 方 案 浩百佳科技车牌识别自助缴费系统方案
目录 一、序言 (3) 二、系统简介 (4) 2.1、系统功能特点 (5) 2.2、系统工作流程图 (6) 2.3、系统施工安装图 (7) 2.4、系统安装拓扑接线图 (8) 2.5、车牌识别系统技术指标 (8) 三、系统结构 (9) 3.1、系统硬件设备 (9) 3.1.1、显控一体机 (10) 3.1.2、车牌识别道闸一体机 (12) 3.1.3、豪华自动道闸 (13) 3.1.4、自助缴费终端机 (14) 3.1.5、出入口终端机 (15) 3.2、管理软件 (16) 3.2.1、软件功能特点 (18) 3.2.2、中心管理系统 (18) 3.2.3、微信支付功能流程 (19) 3.2.4、自助缴费系统功能流程 (21) 3.2.5、临时车收费标准设计 (24) 3.2.6、APP客户端 (25) 3.2.7、无人值守原理及收费方式................... 错误!未定义书签。5 四、系统安装与调试 (32) 4.1、相机IP地址设置 (32) 4.2、数据库及停车场软件安装步骤 (34) 4.3、停车场软件设置 (38) 4.4、常用停车场功能介绍 (48) 五、售后服务 (53)
一、序言 随着现代化管理手段的进步和科学技术的日益发展,用户对车辆管理的要求越来越高。过去的人工刷卡的管理方式已经不适应现代化停车的需要,已经基本被车牌识别收费管理系统所取代。但针对目前快节奏,高速度的工作模式,要求管理方法和制度要有一个根本的改善,这种改善不但要适应用小区管理的需求,也要适应社会的需求,要适应人的感官的需求和习惯性操作的需求。目前简单的车牌识别系统已经完全满足不了用户需求了。例如现行的车牌识别系统还停留有人收费管理的基础上。这样就不仅给物业公司带来特别大的人力成本也增加了管理成本,更重要是人工收费找零效率太低严重影响了车辆通行速度,给车主停车体验感很差,也大大降低了物业管理档次。现在无人值守,自助缴费车牌识别收费管理系统既可大大降低物业人力和管理成本的同时也提高了车辆通行速度,改善了停车体验,也同时提升了物业档次。 本设计方案就是基于以上的思想基础,结合各种现代化高科技手段我们开发设计了可脱机识别计费、自助缴费,无牌车自动识别并支持多种缴费方式(例如:微信,支付宝,现金等)的无人值守,自助缴费车牌识别系统。本系统即支持有人收费管理模式同时也可选择完全无人值守,自主缴费的工作模式。真正实现快速通行,手机远程管理(计费,开闸,对讲)。而这种无人值守,自助缴费停车模式必将是未来停车场管理主流模式,因为手机支付的便捷性和普及程度决定了未来停车必须支持移动支付。 无人值守,自助缴费车牌识别管理系统基本原理: 物业管理处工作人员网上注册公众号并开通支付功能后将账号输入到停车场管理软件,这样每笔停车费就及时到账物业银行卡,资金无需经过第三方支付平台。车辆入口通过车牌识别或无牌车在入口停车机器人上输入手机号,或扫码入场;出场取车前可以在场终端机上自助缴费或关注车场公众号后在车主手机上
基于单片机的车牌识别系统设计与实现 目录 摘要 (2) 二、选题 (4) 三、系统主要特点 (5) 四、系统方案、实现原理 (6) 4.1 图像采集及存储格式 (8) 4.2 图像的灰度化 (8) 4.3 图像的二值化 (9) 4.4 车牌的去边框 (9) 4.5 图像的梯度锐化 (10) 4.6 字符分割算法 (11) 4.7 字符的归一化 (12) 4.8字符特征提取 (13) 4.9 字符识别算法 (15) 4.9.1 BP神经网络法 (15) 4.9.2 模板匹配法 (17) 五、操作说明与硬件框图 (18) 六、实验程序 (19) 七、数据统计分析 (66) 八、结果分析 (66) 九、实验心得 (66) 十、参考文献 (69)
摘要 伴随着世界各国汽车数量急剧增加,城市交通状况日益引起人们的重视,如何有效地进行交通管理,已成为越来越多人关注的焦点,解决这些问题的关键就是建立智能交通系统。车牌识别是智能交通系统的重要组成部分,它在交通控制与监视中有着多种用途,目前已广泛应用于各种领域。 本文将TMS320C54XX作为核心器件用于车牌自动识别系统中,完成车牌图像的采集、数字图像的处理、提取车牌信息并针对提取的特征对字符进行识别。首先分析了车牌识别系统实现的背景以及其实现意义。然后对实现车牌识别的硬件环境作简要介绍。接着对车牌识别过程中所涉及的边缘检测、字符分割、大小归一化等一系列数字图象处理技术进行进一步的详细分析。之后,对几种字符特征提取算法进行了对比分析,最后选取最适合的网格特征提取法,以此为基础进行模扳匹配,最终识别出车牌号码。 关键词:车牌提取;图象处理;车牌识别;单片机;模扳匹配
车牌识别系统技术 方案
停车场管理系统 自动车牌识别计费系统技术方案
目录 1企业概况 (4) 1.1公司简介 (4) 1.2资质证书 (4) 2概述 (10) 2.1系统方案总体设计 (10) 2.2项目背景 (12) 2.3方案概述 (14) 3系统介绍 (16) 3.1车牌识别系统简介 (16) 3.2系统优势 (18) 3.3系统组成 (19) 4主要设备参数性能介绍 (22) 4.1CA-AB900道闸 (22) 4.2INEX- TI200 200万高清识别一体机 (23) 4.3CA-600读卡控制器 (26) 技术参数: (26) 4.4软件监控界面 (27) 4.5其他辅件 (27) 5售后服务 (28) 5.1保修时间及范围 (28) 5.2维修及维护服务 (28) 5.3更新改进服务 (29) 5.4客户档案,完善产品质量 (29) 6部分工程案例 (31)
1企业概况 1.1 公司简介 北京市仟安科技有限责任公司是设计、研发、生产、销售、服务为一体的高新技术企业。公司凝聚了大批实力雄厚的研发团队和技术团队,凭着对智能化应用领域多年来的积淀和对未来智能化领域发展的导向,为用户提供有价值的产品和服务。 公司经过多年的开发研究,引进国外最先进的高新技术,不断完善自我。主要研发停车场主板软件、生产智能道闸、停车场收费系统、车位引导系统、派车系统、门禁系统、自动检售票系统等安防权限认证、消费认证产品。仟安的智能系统解决方案也已得到客户的全面认可和好评。经国家技术监督部门检验、产品的技术含量及外光造型已达到世界先进水平。现“仟安”产品已遍布全国各大城市及地区,并已成功销往海外。 公司以“冲破束缚,发展无限”为企业宗旨,积极引领核心技术创新,不断为全球用户创造完美产品。逐渐形成了“开拓、创新、共赢、务实”的企业文化,建立了朝气蓬勃的精英团队。 公司自创立以来,一直保持了高速发展态势,现已成为国内停车场系统服务领域的领跑者,致力于成为中国领先的安防服务品牌。 1.2 资质证书
车牌识别系统需求分析文档 车牌识别系统需求分析小组 组长:**** 组员:**** **** **** ****
目录 1 引言 (1) 1.1编写目的 (1) 1.2背景 (1) 1.3定义 (1) 1.4参考资料 (1) 2 任务概述 (2) 2.1目标 (2) 2.2用户的特点 (2) 2.3假定和约束 (2) 3 用例分析(或数据流程分析) (3) 3.1 系统Actor分析 (3) 3.2 系统用例描述 (3) 4 动态行为模型 (10) 5 系统流程分析 (12) 6 系统开发及运行环境规定 (15) 7 小结 (16)
1 引言 1.1编写目的 目的:文档编写详细的描述了整个车牌定位与识别的过程,能够帮助使用该系统的人员快速了解该系统的用法。 面向人员:需要利用车牌定位与识别系统进行机器学习的学生。 需要用车牌系统去识别车牌的交通警察 “车牌定位与识别系统”管理员 1.2背景 系统名称:车牌定位与识别系统 系统开发者:“车牌定位和识别系统”开发组。 该系统基于opencv2.4.8版本和Visual Studio2013开发。依赖于opencv2.4.8 1.3定义 SVM:支持向量机 ANN:人工神经网络 高斯模糊 二值化 灰度化 Soble算子 1.4参考资料 《软件工程》Ian Sommerville著程成等译机械工业出版社 《软件工程及应用》张斌、郭军主编东北大学出版社
2 任务概述 2.1目标 通过视频图象的检测与识别,可以实时检测交通违章现象、识别违章车辆的车牌号码,为公安交通管理部门提供强有力的执法证据。因此,研究交通图象检测与处理方法对智能交通运输系统的发展具有重要的推动作用。本系统着力对车牌的识别过程进行研究和实现,最终能够识别出图片上的车牌信息。此外,本系统涉及到机器学习的内容,因此可以供喜欢机器学习的学生进行学习。 2.2用户的特点 该系统的目标用户为交通警察、学生和管理人员,对于交通警察和学生来说只需能熟练操作电脑即可,对于管理人员则需要掌握机器学习相关知识。 2.3假定和约束 该系统在Windows系统下开发,但会受到经费、寿命、社会等因素限制,预计开发期限为1年,使用期限为5年以上。
第一部分:系统介绍及应用分析 一、系统简述 随着科学技术水平的发展,视频领域已进入高清时代,我公司通过多年研究,隆重推出了高清车牌识别一体机和道闸的简单且豪华组合,使用很少的设备完成了停车场系统对固定用户和临时收费的管理要求。传统的停车场大多采用近距离读卡方式,必须停车伸手刷卡,上下坡道停车刷卡容易造成溜车、碰撞等事故,并且停车场卡片属于一种耗材,后期添加需要购买,还涉及丢卡、坏卡等情况引发的经济纠纷,在以车牌识别为主导的智能车辆管理系统中不会出现此类情况,高清车牌识别系统主要通过车牌识别技术,实现对进出车辆车牌信息的识别,每一辆出入停车场的车辆均有出入图片匹配,由系统软件根据收费方案核算收费金额并显示在道闸的显示屏上,车辆进出场时可以实现不停车通行。 整套系统使用简单、维护方便、稳定性强,采用 TCP/IP 网络通讯,布线简单、方便,大大减少了施工难度,便于设备的调试及维护。 二、车牌识别介绍 车牌识别技术以计算机技术、图像处理技术、模糊识别为基础,建立车辆的特征模型,识别车辆特征,如号牌、车型、颜色等。它是一个以特定目标为对象的专用计算机视觉系统,能从一幅图像中自动提取车牌图像,自动分割字符,进而对字符进行识别,它运用先进的图像处理、模式识别和人工智能技术,对采集到的图像信息进行处理,能够实时准确地自动识别出车牌的数字、字母及汉字字符,并直接给出识别结果,使得车辆的电脑化监控和管理成为现实。 车牌识别系统流程
第二部分:系统设备组成及工作逻辑 一、系统设备组成 该套系统主要由以下部分组成: 入口控制部分:X9 道闸一体机也可换其他样式速度的道闸(含高清车牌识别一体 机、聚光灯、控制主板带控制功能) 出口控制部分:X9 道闸一体机也可换其他样式速度的道闸(含高清车牌识别一体 机、聚光灯、控制主板带控制功能) 岗亭终端:电脑主机、停车场管理软件、485/232 通讯转换器 管理中心:电脑主机、停车场管理软件 二、车辆管理流程 车辆入场: ◆临时车辆 临时车辆入场时,高清车牌识别一体机远距离自动识别车牌号、记录入场时 间等,并在道闸的显示屏上显示该车的车牌号,道闸远距离快速抬杆,不停车通 行进入车场;车辆通过后道闸杆自动落下。 ◆固定客户车辆 管理计算机将对应授权通道的车牌信息到车牌识别管理软件中。固定车辆进 入停车场时,车牌识别一体机自动抓拍、识别、处理车辆的车牌信息,并将识别 结果传送到管理计算机,管理计算机利用识别结果查询数据库,识别正确自动放 行车辆,并在道闸的显示屏上显示该车的车牌号;车辆通过后道闸杆自动落下, 达到车辆不停车通行。 车辆出场: ◆临时车辆 临时车辆出场时,高清车牌识别一体机远距离自动识别车牌号、上传到电脑, 管理电脑自动调出该车进场的车牌及入场时间等信息,并自动计算停车时间、收 费金额,并在道闸的显示屏上显示收费金额; 收费完成后,道闸杆自动开启放行车辆,车辆通过后道闸杆自动落下; ◆固定客户车辆 固定车辆外出停车场时,车牌识别一体机自动抓拍、识别、处理车辆的车牌 信息,并将识别结果传送到管理计算机,管理计算机利用识别结果查询数据库, 识别正确自动放行车辆,并在道闸的显示屏上显示该车的车牌号;车辆通过后道 闸杆自动落下,达到车辆不停车通行。
车牌识别系统 施 工 方 案
第1章车牌识别系统结构及安装 1.1车牌识别系统硬件组成 车牌识别系统主要由软件、数据库,道闸、地感、交换机、车牌识别一体机、LED补光灯、摄像机防护罩、立柱、万向节等硬件组成。 1.1.1车牌识别一体机 ADV10车牌识别一体机(如下图所示)是北京博思晟智能技术有限公司开发的基于DSP硬件识别的车牌识别系统。 本产品采用高速芯片作为识别算法的运行硬件平台,与传统的车牌识别系统不同,设备无需计算机即可实现车牌图像的采集、识别等功能,具有识别性能高、环境适应性强、安装维护简单等特点。嵌入式车牌算法(综合识别率≥99%)TCPP/IP网络接口 视频流识别优化处理,多触发机制 电动调焦,远程控制 可脱机运行:前置数据存储功能 自动跟踪光线变化、有效抑制顺光和逆光 嵌入式智能感光,自动补光
1.1.2博思晟LED补光灯 车牌识别一体机自带补光灯,自动跟踪光线变化、有效抑制顺光和逆光,嵌入式智能感光,自动补光,基本无需调试,建议外置常亮白光灯,安装位置如下图所示: 摄像机识别车牌原理; 当车牌进入摄像机监控范围时,摄像机就开始分析,当车牌触发到虚拟线圈后,摄像机将识别结果发送给计算机软件。线圈是触发给结果的信号,而不是识别范围或者触发拍照的信号。所以摄像机在调试的时候,尽量让摄像照的远一些,然后线圈尽量离道闸近一些,距离再在-4米为宜。 摄像机的补光灯不要调的太亮,太亮容易让车牌曝光,摄像机补光灯调到车辆距离摄像机4-7米时,车牌字母反点光即可。外置补光灯,将远处照亮即可。 1.1.3防护罩、立柱和万向节 防护罩尺寸如下图所示:
目录 目录 (1) 第一章设计说明 (2) 一、前言 (2) 二、公司简介 (3) 三、设计思路 (3) 第二章系统概述 (5) 一、系统的组成 (5) 二、系统的特点 (5) 三、技术参数 (5) 第三章系统工作流程图、配置图 (6) 一、流程图 (6) 二、入场流程图: (6) 三、出场流程图: (7) 第四章系统主要产品简介 (9) 一、自动快速道闸 (9) 二、数字式车辆检测器 (9) 三、出、入口控制机 (9) 第五章车牌自动识别简介 (10) 一、车牌识别系统的施工定位及安装 (10) 二、车牌识别技术参数 (12) 第六章系统软件功能简介 (13) 一、管理功能设定 (13) 二、系统自维护功能: (16) 三、理财功能: (16) 四、系统软件组成: (17) 五、系统软件特点: (17)
第七章售后服务 (17) 一、咨询服务 (17) 二、维修服务 (17) 三、更新服务 (18) 第一章设计说明 一、前言 首先感谢贵公司对我公司的信任,让我们参与小区停车场的智能管理收费系统设计、选型工作。随着中国经济的高速发展,汽车增长迅猛,出现了停车难、管理难的社会问题,同
时,人们的居住与办公环境也在不断改善,智能大厦、小区已逐步开始普及。在智能大厦、小区的规划建设中,有一个非常重要的内容,就是停车场的智能化、现代化管理系统的建设。一个好的停车场除了必须有合理的交通设施组织规划外,还应具备先进的硬件管理设备,以保证车辆进出快捷顺畅、安全有序;同时还需要完善的管理软件,以保证管理科学、收费公正合理、资金不流失,以维护消费者的合法权益,保护投资者的利益。基于目前现状,我公司已研制开发出具有先进科学水平的停车场管理系统以供选择。 二、公司简介 公司具有独立的法人资格,在停车场智能化管理系统和停车场交通设施行业中,是全国最具有规模的专业公司,从研发设计、生产、销售、施工、服务,每个环节都是我公司自行完成,采用材料保证质量,符合国家标准。自成立以来,上海丽装秉承技术领先优势,在停车场智能管理系统的软、硬件方面,已经突破了芯片、集成电路、控制系统、软件开发等一大批系统设备国产化的技术瓶颈,开发出了拥有自主知识产权的智能电动道闸,入口控制机和读卡控制机,系统管理软件及联网管理软件,图象处理软件,自动出卡机构、入口控制机外观、读卡控制机外观、智能电动道闸等外观设计;“停车场智能设备、交通设施”均被中国技术监督情报协会确认为“中国质量过硬服务放心信誉品牌” 三、设计思路 1、项目概况:该项目的停车场有6个出入口,设计为3进3出。根据停车场的使用和管理要求,保证车辆安全、快捷的进出、停泊,完整的记录车辆进出的各类数据,提高停车场管理的智能化程度,确实完善该项目的配套服务功能是本次方案深化设计的主要出发点。 2、依据规范: 1、《智能建筑设计标准》GB/T50134-2000 2、《民用建筑电气设计规范》JGJ/T16-92 3、《安全防范工程与要求》GA/T75-94 4、《防盗报警控制器通用技术条件》GBI2663-90 5、《建筑电气工程施工质量验收规范》GB50303-2002 6、《智能建筑工程质量验收规范》GB50339-2003 3、管理模式:鉴于项目的实际情况,我们将车库设计为1进1出的车牌自动识别管理模式,将出口控制机、出口管制自动道闸设置在出口通道的直通道起步位置,在抓拍车牌时要
一、 车牌识别出入口管理系统设计 1.1 系统简介 停车场基于车牌识别管理模式的系统,设备一般包括车牌识别专用摄像机、车牌识别器、信息显示屏、自助缴费终端、电动道闸、图像对比和车牌识别系统、计算机等。为了满足客户不同管理需求,各个设备可以灵活组合。 在本项目中,系统需要对临时用户、固定用户进行实时管理,对其出入的时间、车牌号、图像进行严格记录、识别和登记,并按照停车时间和计费规则对各种车辆进行收费,并防止车辆丢失。 智能车牌识别收费管理系统系统图 主要功能: ● 车牌识别比对功能,防止车辆被盗 ● 语音提示,人性化操作提示 ● 支持灵活费率设定,不限时段,多种设定。 ● 支持车牌识别缴费功能,免除临租卡的发放,提高通行速度 管理中心服务器 数据采集器 自动道闸收费显示屏 摄像头收费管理系统 自动道闸 摄像头
●多进多出联网系统管理,支持出入口嵌套管理功能 ●异常情况处理,满足消费报警、应急手动等 ●支持51park网站的车位查询和预定功能,利于数据集中、管理集中 1.2其他子系统介绍 ●一卡通支付、手机支付: 用一卡通、手机支付缴停车费,替代临租卡,刷卡付费一次完成,还可 自助缴费。 ●ETC缴费 利用ETC有源卡,读卡距离6-10米,可不停车通过,提高通行效率, 减少出入口数量。 ●车牌识别,集中收费 利用车牌识别技术,获取车牌号码,替代临租卡的发放,驾车者在收费 处输入车牌号就可缴费,提高了效率。 ●无人职守自助缴费 驾车者自己在终端上输入车牌号码,调取入场记录,用一卡通、手机、 信用卡等方式自助付费,提高了服务水准。 ●折扣机,积分扣缴 对在商场酒店消费的客户,通过折扣机减免停车费,可用消费积分抵车 费,吸引有效用户,提高商场收入。 ●车位查询和预定(配合51park网站) 通过无线网络,自动上报停车场的空车位、收费价格等信息,供51park 网站的客户查询和预定,预定信息从51park网站下传到收费系统,并自 动处理。 1.3停车管理系统出入口设置 在停车场入口处设置车牌识别摄像机、LED显示屏(带语音)、自动道闸、地感线圈等。设备位置如图所示:
1.1)系统概述 车识易高清车牌识别系统(以下简称车识易)将计算机视觉技术、神经网络系统技术、机械、电子自动化设备、计算机以及智能卡技术有机的结合起来,从而对各类出入车辆进行有效的管理。通过车牌号码智能识别车辆信息,道闸自动开启。操作界面统一,全程在线帮助,超强的兼容性。 1.2)系统特性 自主性: 车识易系统是我司完全自主研发的新一代网络车牌识别停车场管理系统,在软件功能改善和系统对接方面具有绝对的优势。 安全性: 1)数据处理速度快、信息存储安全; 2)出口提供多个相似车牌选择,针对无牌车可进行工录入车牌匹配,保证进出车辆进出的一致性; 3)对列为黑名单车牌,进行语音报警; 4)服务器实时数据备份,且异地存储,可进行灾难恢复。 适应性: 1)当停车场中客户端出现故障时,服务器或其他客户端可以立即接管该设备业务流程,进行正常收费、计费?; 2)采用B/S与C/S嵌套模式,C/S单点收费,B/S集中管理,可满足多进多出、多区域管理、跨区域管理多级服务器管理模式需求; 3)可根据环境光自动调整相机成像亮度,保证全天候图片抓拍质量、识别率。
便捷性: 1)一键式解压安装绿色软件,无惧病毒侵扰; 2)采用实时同步机制,服务器配置可随时更改; 3) TCP/IP网络通讯,工程施工不再繁琐; 4)界面更直观、人性化,适用于各个年龄段的岗亭人员操作 兼容性: 1)兼容所有版本车识易智能车牌识别系统硬件设备; 2)兼容所有主流Windows操作系统; 1.3)解决问题 物业目前存在隐患 随着ITS技术的发展,越来越多的新技术不断地在ITS中得到应用,其中在收费系统中,车牌识别系统得到广泛的重视,应用技术也日趋成熟。 目前,多数收费仍采用人工输入车牌号码及刷卡出入,这不但加重了操作员的负担,同 时也增加了操作和判断错误的机率。传统物业使用刷卡出入管理弊端频频发生,账单错漏、刷卡出入漏洞。详细情况分为以下几点; (1)传统刷卡同行效率低,通车速度慢,部分新手司机易出事故。 (2)车主一卡多用,物业管理弊端:物业管理弊端通病,使用刷卡出入车主,卡片进 场后递交给其余车辆进行入场操作。 (3)车主“摩托车月卡”当做“小车月卡”来使用:部分业主每月使用摩托车卡,缴 纳摩托车卡费用。出入岗亭时,以“摩托车卡”替代“小车卡”进行出入通行。 (4)物业临时车收费监管力不从心,滋生保安“隐性收入”:弘诚厚园使用传统刷卡报表,
目录 一、摘要: (3) 二、设计目的和意义: (3) 2.1、设计目的: (3) 2.2、设计意义: (2) 三、设计原理: (2) 四、详细设计步骤: (2) 4.1、提出总体设计方案: (3) 4.2、各模块的实现: (4) 五、设计结果及分析 (20) 六、总结: (21) 七、体会 (22) 八、参考文献: (22)
一、摘要: 随这图形图像技术的发展,现在的车牌识别技术准确率越来越高,识别速度越来越快。无论何种形式的车牌识别系统,它们都是由触发、图像采集、图像识别模块、辅助光源和通信模块组成的。车牌识别系统涉及光学、电器、电子控制、数字图像处理、计算视觉、人工智能等多项技术。触发模块负责在车辆到达合适位置时,给出触发信号,控制抓拍。辅助光源提供辅助照明,保证系统在不同的光照条件下都能拍摄到高质量的图像。图像预处理程序对抓拍的图像进行处理,去除噪声,并进行参数调整。然后通过车牌定位、字符识别,最后将识别结果输出。 二、设计目的和意义: 2.1、设计目的: 1、巩固理论课上所学的知识,理论联系实践。 2、锻炼学生的动手能力,激发学生的研究潜能,提高学生的协作精神。 3、通过本次二级项目的设计,能够综合运用所学理论知识,拓宽知识面,系统地进行电子电路的工程实践训练,培养工程师的基本技能,提高分析问题和解决问题的能力。 2.2、设计意义: 车辆牌照在交通系统管理中有着重要的作用,通过它可以检索车辆的各项重要信息,实现车辆的控制、运输安排、停车管理、自动收费、事故处理等功能,从而给交通系统的自动管理提供极大的方便。 车牌定位系统的目的在于正确获取整个图像中车牌的区域,并识别出车牌号。通过设计实现车牌识别系统,能够提高学生分析问题和解决问题的能力,还能培养一定的科研能力。 三、设计原理: 牌照自动识别是一项利用车辆的动态视频或静态图像进行牌照号码、牌照颜色自动识别的模式识别技术。其硬件基础一般包括触发设备、摄像设备、照明设备、图像采集设备、识别车牌号码的处理机等,其软件核心包括车牌定位算法、车牌字符分割算法和光学字符识别算法等。某些牌照识别系统还具有通过视频图像判断车辆驶入视野的功能称之为视频车辆检测。一个完整的牌照识别系统应包括车辆检测、图像采集、牌照识别等几部分。当车辆检测部分检测到车辆到达时触发图像采集单元,采集当前的视频图像。牌照识别单元对图像进行处理,定位出牌照位置,再将牌照中的字符分割出来进行识别,然后组成牌照号码输出。 四、详细设计步骤: