3PHASE MOTOR SPEED CONTROL DRIVER FOR ELECTRICAL VEHICLE
William Camilo, Ariel Matías, Emil Rodriguez, Julio Gutierrez, Edgar Cruz, Miguel Vásquez, Dacely Beltran
Cidtec Unapec, Dominican Republic
Abstract— The extraordinary increase of the price of the petroleum barrel, that in the last dates has gotten to surpass the 67 dollars, is due to the shortage of this resource in the world-wide market. The problem at this moment is not by the side of the capacity of the supply, but by the side of the strong demand of the world. The instant case of the weakness of world-wide the oil market is the continuous increase of the demand of the expansion economies, that are these dates has already reached the 84,4 million barrels of petroleum to the day. Some countries already are remaining are petroleum and the rows of delay to acquire the provisions of this resource, now are organized by the price. Nowadays the nations that they have for a barrel over the 100 dollars will be able to continue with their programs of economic growth, those that no, simply will have to hope to that the price lowers to be able to buy it. In Central America already the enormous increase in the price of the crude one is suffered and one of the sectors more harmed is the one of the transport, due to its direct dependency. Reason why at present bottoms have dedicated many for investigation of another methods to depend less possible on derivatives of petroleum, as it is the case of the hybrid vehicles whose mechanism is based on a motor of combustion along with an three-phase motor, all this trying to consume the less possible gasoline, since the three-phase motor can work with stored electrical energy of one or the other form. Reason why for this case the creation is needed a reliable control system for the handling of the three-phase motor.
Key Words — 3phase inverter, electronic driver, electrical motors, three phase motor calculation, pwm voltage control, frequency and voltage constant.
I.INTRODUCTION
THE PARAMETERS THAT DEFINE THE PROBLEM AND SOLUTIONS Three-phase engine control Possible solutions 1-Creation of a mechanical motor 2-Creation of an electronic control Space that the circuit occupies within the car Possible solutions 1-Create a specific space at the time of the design of the frame of the car. 2-Realise the design of possible smallest mechanical or electronic the control. 3-that the design of the mechanical or electronic control adjusts to the spaces nonused of the car. That the investment for the design is economic Possible solutions 1-Use devices or machineries of low cost. 2-Create a design of control with few devices or machineries.
CHOSEN SOLUTION
It has been chosen like solution to the problem, the creation of his electronic relatively small size, control system and low cost of construction. Reason why for this case the creation is needed a reliable control system for the handling of the three-phase motor.
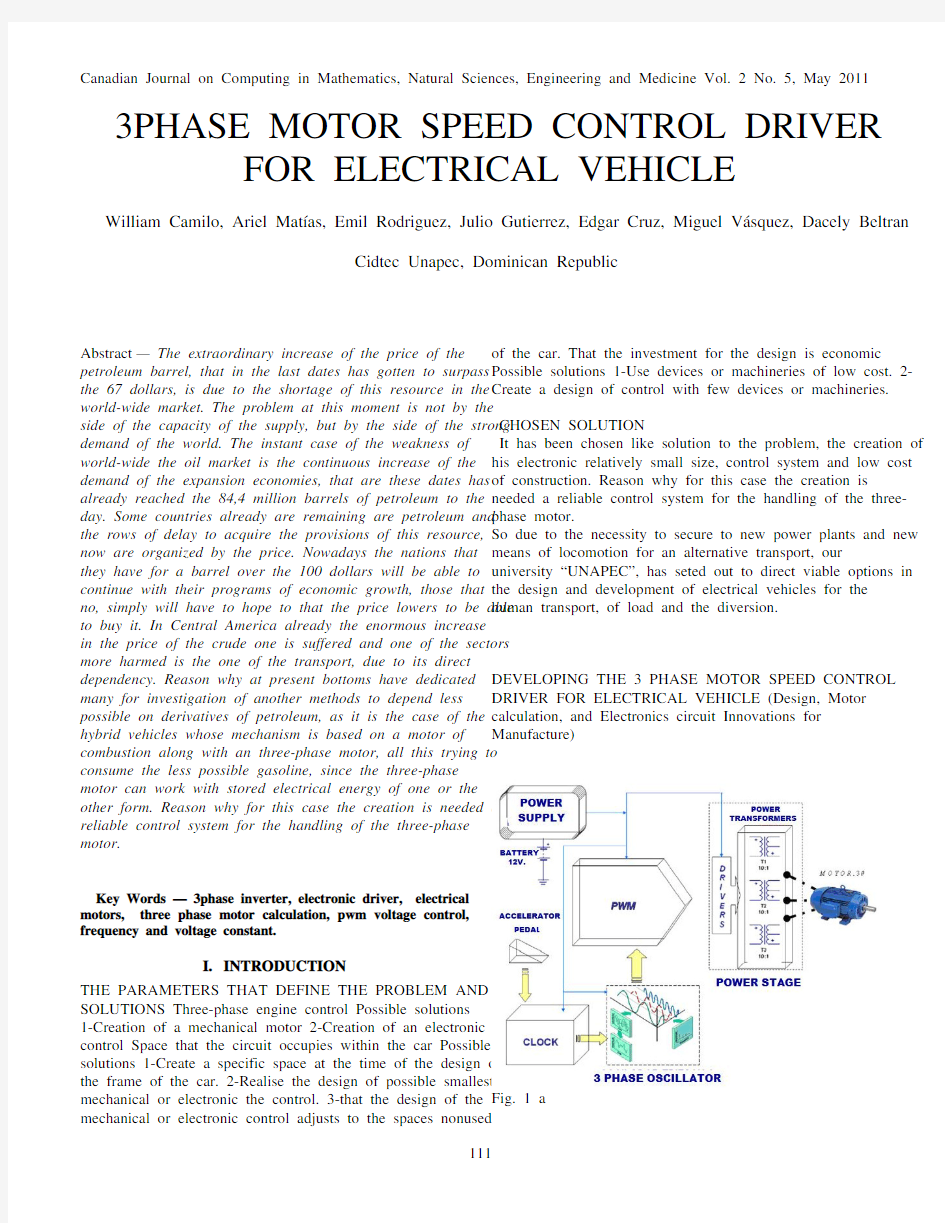
So due to the necessity to secure to new power plants and new means of locomotion for an alternative transport, our university “UNAPEC”, has seted out to direct viable options in the design and development of electrical vehicles for the human transport, of load and the diversion. DEVELOPING THE 3 PHASE MOTOR SPEED CONTROL DRIVER FOR ELECTRICAL VEHICLE (Design, Motor calculation, and Electronics circuit Innovations for Manufacture)
Fig. 1 a
Fig. 1b
Fig. 2
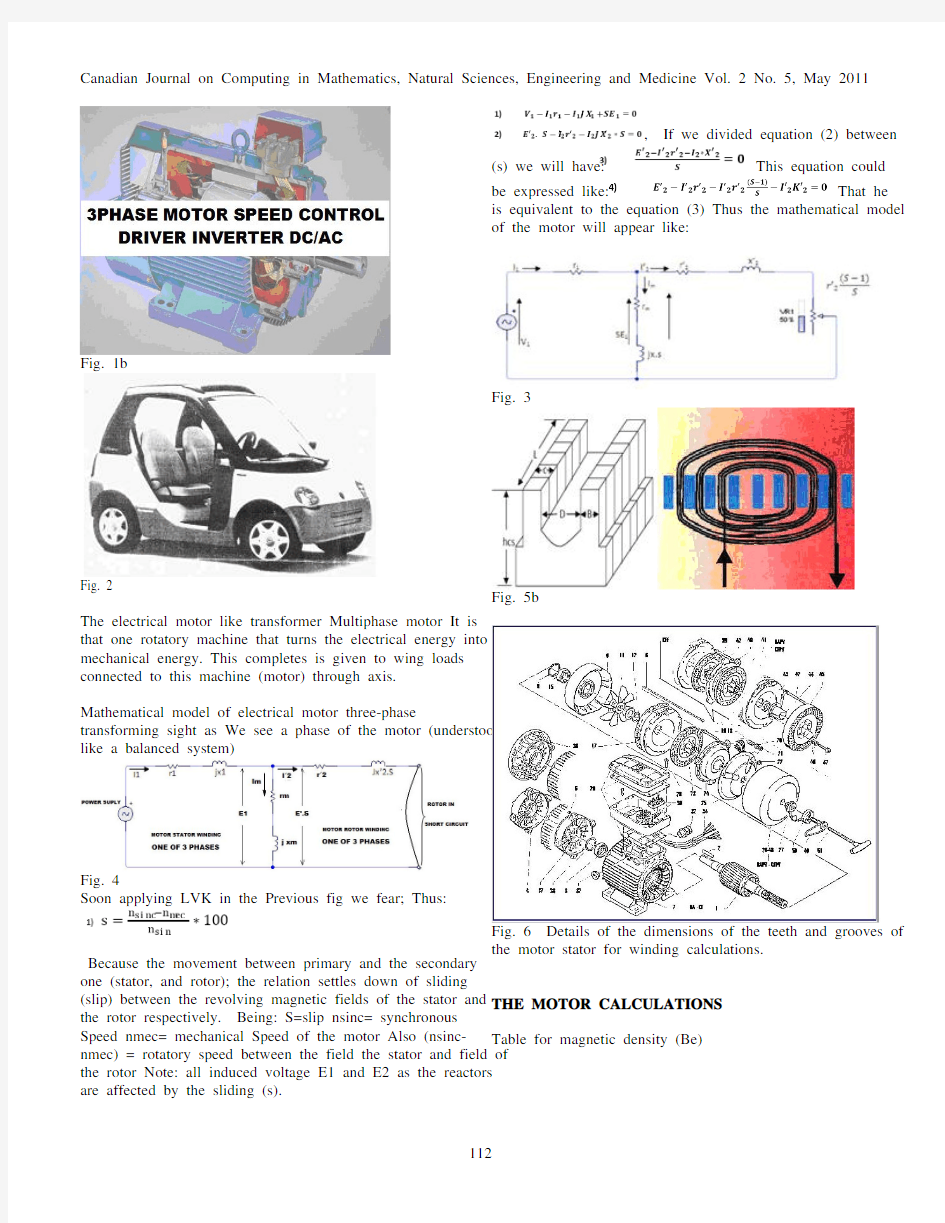
The electrical motor like transformer Multiphase motor It is that one rotatory machine that turns the electrical energy into mechanical energy. This completes is given to wing loads connected to this machine (motor) through axis.
Mathematical model of electrical motor three-phase
transforming sight as We see a phase of the motor (understood
like a balanced system)
Fig. 4
Soon applying LVK in the Previous fig we fear; Thus:
Because the movement between primary and the secondary one (stator, and rotor); the relation settles down of sliding (slip) between the revolving magnetic fields of the stator and the rotor respectively. Being: S=slip nsinc= synchronous Speed nmec= mechanical Speed of the motor Also (nsinc-nmec) = rotatory speed between the field the stator and field of
the rotor Note: all induced voltage E1 and E2 as the reactors
are affected by the sliding (s).
, If we divided equation (2) between
(s) we will have:
This equation could
be expressed like: That he is equivalent to the equation (3) Thus the mathematical model of the motor will appear like:
Fig. 3
Fig. 5b
Fig. 6 Details of the dimensions of the teeth and grooves of the motor stator for winding calculations.
THE MOTOR CALCULATIONS
Table for magnetic density (Be)
With:
And Kp, as step factor:
And K2, as distribution factor:
And Kb, as winding factor: ; and bph, coil windings per phase:
So the turns number (Nb) for each winding phase are:
Being: vph, phase voltage, kv%, overvoltage as poles, f,
frequency, Hcs= Height of the tooth, ne= I number of grooves, m= phases, P= pair of pole Inner, Di=Diameter, L= Length of the tooth, q= coils/group, and constants.
Winding connetions
Fig. 7
3 PHASE WAVE FORMS FOR THE POWER DRIVER INVERTER DESIGN
Fig. 8
PARAMETERS THAT DEFINE THE PROBLEM AND SOLUTIONS
Three-phase engine control Possible solutions 1-Creation of a mechanical motor 2-Creation of an electronic control Space that the circuit occupies within the car Possible solutions 1-Create a specific space at the time of the design of the frame of the car. 2-Realise the design of possible smallest mechanical or electronic the control. 3-that the design of the mechanical or electronic control adjusts to the spaces nonused of the car. That the investment for the design is economic Possible solutions 1-Use devices or machineries of low cost. 2-Create a design of control with few devices or machineries. CHOSEN SOLUTION It has been chosen like solution to the problem, the creation of his electronic relatively small size, control system and low cost of construction.
Fig. 9
FIRST 3PHASE NON REGULATED ELECTRONIC GENERATION SYSTEM
Fig. 10
Option for pwm generation per phase
Fig. 11
Another non regulated 3 phase inverter model STATE OF ART
Fig. 12
POWER SUPPLY IF NO ARE USING BATTERIES STATE OF ART
Fig. 13
OUR DIAGRAMS IN BLOCKS OF THE CONTROL SYSTEM
Fig. 14
Fig. 15
POSSIBLE DESIGNS OF THE BLOCKS FOR A FULL REGULATED SYSTEM ?
BLOCK POWER SUPPLY
Since a great amount is needed current, the battery of the vehicle will be used like primary source, and in some cases sources of voltages will be used to assure the stability the tension in sensible stages.
? BLOCK CLOCK Options: 1-Circuit Astable with integrated 555 2-Circuit Astable with transistors ?
THREE-PHASE OSCILLATING BLOCK Options: Integrated 1-Circuit 4017 Mechanical 2-Motor 3-Flip-Flops ?
BLOCK PWM Options: 1-Circuit with OPAM 2-Circuit with integrated PWM 3-with adjustments of SCR and UJT ? BLOCK POWER STAGE Options: 1-Drivers with Mosfets and transforming 2- Drivers with BJT and transforming 3-with transistors in Bridge (Bridge) CHOSEN DESIGNS The emphasized options were the chosen ones for the development of the project.
GENERAL DESCRIPTION OF THE OPERATION The POWER SUPPLY
provided by the battery of the vehicle, is in charge to feed all the stages on the electronic circuit.
The CLOCK and OSCILLATOR TROFASICO,
work jointly to generate a signal out of phase to 120 degrees, signals that go directly to the PWM to modulate their width of pulse. Emphasizing that the frequency and the width of the pulse will be varied proportionally as the conductor exerts pressure to the accelerator. The exits of the PWM are connected to the POWER STAGE where the signal is amplified providing a proportional voltage to integration in the time of the signal of the PWM. Finally an asynchronous three-phase motor is connected.
ELECTRONIC SCHEME
Fig. 16
SCHEMES AND EXPLANATIONS
SCHEME POWER SUPPLY
Fig. 17
As it were explained previously, the primary power supply is the battery of the vehicle reason why the scheme only shows to the connection of a regulator 7808 with condensers in the entrance and the exit to leak to filter so much the entrance of the regulator like its exit. This circuit serves to feed the blocks: Clock, three-phase Oscillator, PWM and drivers of the power entrance.
SCHEME CLOCK
Fig. 18
In this way an oscillating square signal to frequencies of 1.2Hz to 60Hz is generated, the same signal will have like value high VDD (approximately) and like value under 0V. If it is desired to fit the frequency it must fit the D1 potentiometer.
THREE-PHASE OSCILLATING SCHEME
Fig. 19
The Flip-Flops is connected in Jhonson accountant with his clocks united and these receive the signal of count of circuit 555 of the Clock block, this union allows to generate been out of phase signals to 120 gados.
SCHEME POWER
Fig. 20
STAGE It is a stage of simple power with transistors MOSFETS used in any investor, with snubber to suppress inverse tips and avoiding that the MOFETS undergo some type of damage. SCHEME PWM
Fig. 21
In order to carry out the control of widening of the pulse a circuit based on microcontroller was taken like control
(PIC16F84A) who owns the function to control the time of conduction of each exit according to is the value of the entrance frequency. Later like driver and connected to the exits of microcontroller. This is an pre-amplification stage that takes the exit to the power muscle that controls the power transistors.
PRINTED CIRCUIT BOARD
Fig. 22
MODEL 3D
Fig. 23
Fig. 24
CONCLUSION
The instant case of the weakness of world-wide the oil market is the continuous increase of the demand of the expansion economies, that are these dates has already reached the 84,4 million barrels of petroleum to the day. Some countries already are remaining are petroleum and the rows of delay to acquire the provisions of this resource, now are organized by the price. Nowadays the nations that they have for a barrel over the 100 dollars will be able to continue with their programs of economic growth, those that no, simply will have to hope to that the price lowers to be able to buy it. In Central America already the enormous increase in the price of the crude one is suffered and one of the sectors more harmed is the one of the transport, due to its direct dependency. Reason why at present bottoms have dedicated many for investigation of another methods to depend less possible on derivatives of petroleum, as it is the case of the hybrid vehicles whose mechanism is based on a motor of combustion along with an three-phase motor, all this trying to consume the less possible gasoline, since the three-phase motor can work with stored electrical energy of one or the other form. Reason why for this case the creation is needed a reliable control system for the handling of the three-phase motor.
BIBLIOGRAPHY
[1] Alves, E., Cabaleiro, P. and Donoso, P. (2002). For Small-signal stability parallel-connected converters in stand-alone AC supply systems. IEEE Transactions on Industry Applications, 38, 533 - 542.
[2] Control Key Ltda. (2005). In:
https://www.doczj.com/doc/b72490740.html,
[3] Gualda, J., Martinez, S. and Martinez, P. (2003) Electronic Industrialist: Techniques of power. 2a Edition, Alfaomega - Marcombo, Mexico D.F.
[4] Idowou, P. (2004), In search of to perfect to power eng. http://web.ing.puc.cl/~power/paperspdf/dixon/tesis/Rios.pdf https://www.doczj.com/doc/b72490740.html,.co/biblos/tesis/ingenieria/tesis06.pdf http://taee.euitt.upm.es/Congresosv2/2006/papers/2006S1G03. pdf
https://www.doczj.com/doc/b72490740.html,.co/php/revistas/ScientiaEtTechnica/docsF TP/9514537-42.pdf
http://jupiter.utm.mx/~tesis_dig/10990.pdf
https://www.doczj.com/doc/b72490740.html,/portafolio/portafolio_masinf o.php?id=112&secc=portafolio
ANNEXES
Joint the phases in qbsic
LIST P=PIC16F84
;------------------------------------------------------------
; Declaración de registros
;------------------------------------------------------------ w equ 00h
status equ 03h
i equ 0ch
p equ 0dh
reg1 equ 0eh
k1 equ 0fh
k2 equ 10h
k3 equ 11h
k4 equ 12h
k5 equ 13h
k6 equ 14h
k7 equ 15h
k8 equ 16h
k9 equ 17h
k10 equ 18h
k11 equ 19h
k12 equ 1ah
k13 equ 1bh
k14 equ 1ch
;------------------------------------------------------------ ; Declaration of Bits
;------------------------------------------------------------ c equ 0 ;carry / borrow bit
rp0 equ 5 ;registrer banck select bit
z equ 2 ;bit cero
b1 equ 1 ;
b2 equ 2 ;
b3 equ 3 ;
b4 equ 4 ;
b5 equ 5 ;
b6 equ 6 ;
;------------------------------------------------------------ ; Start
;------------------------------------------------------------ reset org 0
goto paso2
;------------------------------------------------------------ ; Main program
;------------------------------------------------------------ paso2 ;revision of phase 1 paso2
movf p,0
sublw d'24'
movwf k1
movf p,0
addlw d'24'
movwf k2
movf p,0
sublw d'72'
movwf k3
movf p,0
addlw d'72'
movwf k4
;si el reg i < k1
movf k1,w
subwf i,w
btfss status,c
goto j1
;si el reg i >= k2 movf k2,w
subwf i,w
btfsc status,c
goto j1
bsf reg1,b1
bcf reg1,b2
goto paso6 j1
;si el reg i < k3
movf k3,w
subwf i,w
btfss status,c
goto j2
;si el reg i >= k4 movf k4,w
subwf i,w
btfsc status,c
goto j2
bsf reg1,b2
bcf reg1,b1
goto j3
j2
bcf reg1,b1
bcf reg1,b2
j3
;revision of phase 2 movf p,0
sublw d'56'
movwf k5
movf p,0
addlw d'56'
movwf k6
movf p,0
sublw d'104'
movwf k9
movf p,0
addlw d'8'
movwf k8
; if reg i < k5
movf k5,w
subwf i,w
btfss status,c
goto j4
;si el reg i >= k6 movf k6,w
subwf i,w
btfsc status,c
goto j4 bsf reg1,b3
bcf reg1,b4
goto j8 j4
;if reg p < d'19' movlw d'8'
subwf p,w
btfss status,c
goto j6
;si el reg i < k8 movf k8,w
subwf i,w
btfss status,c
goto j7 ;if reg i >= k9 movf k9,w
subwf i,w
btfsc status,c
goto j7 j5
bcf reg1,b3
bcf reg1,b4
goto j8
j6
movf p,0
sublw d'8'
movwf k7
;si el reg i <= k7 movf i,w
subwf k7,w
btfsc status,c
goto j5
;if reg i > k8
movf i,w
subwf k8,w
btfss status,c
goto j5 j7
bsf reg1,b4
bcf reg1,b3
j8 ;revision of third phase movf p,0
sublw d'40'
movwf k10
movf p,0
addlw d'40'
movwf k11
movf p,0
sublw d'88'
movwf k12
;if reg i < k10
movf k10,w
subwf i,w
btfss status,c
goto j9
;si el reg i >= k11
movf k11,w
subwf i,w
btfsc status,c
goto j9
bsf reg1,b6
bcf reg1,b5
goto j13
j9
;if reg p < d'19'
movlw d'8'
subwf p,w
btfss status,c
goto j11
movlw d'8'
subwf p,0
movwf k14
;if reg i < k14
movf k14,w
subwf i,w
btfss status,c
goto j12
;if reg. i >= k12
movf k12,w
subwf i,w
btfsc status,c
goto j12
j10
bcf reg1,b5
bcf reg1,b6
goto j13
j11
;if reg i <= k12
movf i,w
subwf k12,w
btfsc status,c
goto j10
movf p,0
addlw d'88'
movwf k13
;if reg i > k13 movf i,w
subwf k13,w
btfss status,c
goto j10 j12
bsf reg1,b5
bcf reg1,b6
j13 End.
电动汽车车载网络 引言 汽车技术发展到今天,很多新型电气设备得到了大量应用,尤其是电动汽车的电气系统已经变成了一个复杂的大系统。为了满足电动汽车各子系统的实时性要求,需要对公共数据实行共享 电动汽车作为清洁绿色的新能源汽车, 将在未来交通体系中发挥越来越重要的作用。 汽车中电器的技术含量和数量是衡景汽车性能的一个重要标志。汽车电器技术含量和数量的增加,意味着汽车性能的提高。但汽车电器的增加,同样使汽车电器之间的信息交且桥梁——线束和与其配套的电器接插件数量成倍上升。在1955年平均一辆汽车所用线束总长度为45 米。为了在提高性能与控制线束数量之问寻求一种有效的解决途径,在20世纪80年代初,出现了一种基于数据网络的车内信息交互方式——车载网络。 一、汽车车载网络的组成 车载网络按照应用加以划分,大致可以分为4 个系统:车身系统,动力传动系统、安全系统和信息系统。
图1奥迪A4的车载网络系统 车身系统电路主要有二大块: 主控单兀电路、受控单兀电路、门控单兀电路。 主控单元按收开关信号之后,先进行分析处理,然后通过CAN 总线把控制指令发 送给各受控端,各受控端晌应后作出相应的动作。 车前、车后控制端只接收主拄 端的指令,按主控端的要求执行,并把执行的结果反馈给主控端。门控单元不但 通过总接收主控端的指令,还接收车门上的开关信号输入。根据指令和开关信号, 门控单元会做出相应动作,然后把执行结果发往主控单元。 在动力传动系统内,动力传动系统模块的位置比较集中, 可固定在一处,利 用网络 将发动机舱内设置的模块连接起来。在将汽车的主要因素一跑、停止 与拐弯这些功能用网络连接起来时,就需要较高速的网络传输速度。动力数据总 线一般连接3块电脑,它们是发动机、ABS/ EDL 及自动变速器电脑(动力CAN 数 据总线实际可以连接安全气囊、四轮驱动与组合仪表等电脑 )。总线可以同时传 递10组数据,发动机电脑5组、AB 》EDL 电脑3组和自动变速器电脑2组。数 据总线以500Kbit /s 速率传递数据,每一数据组传递大约需要 0.25ms ,每一电 控单元7-20ms 发送一次数据。优先权顺序为ABVEDL 电控单元--发动机电控单 元 -- 自动变速器电控单元 因此,线束变长, 而且容易受到干扰的影响。 为了防干扰应尽量降低通信速 度,但,丹 駅 咗'i / - Q I "—-r__ L] 车身控 & 阳Poy 灯朮平调幣转萱/灯 厂是砸硕! —
电动汽车四轮独立驱动技术 第一章:绪论 1.1 引言 内燃机汽车自20世纪初出现至今,在其自身随人类科技的进步经历了巨大的变的过程中也给人类生活和生产带来了巨大方便,为人类社会的进步做出了巨大的贡献,但其消耗日益紧缺的石油并产生大量污染物也使人类赖以生存的环境恶化。因此近年来由于环境恶化及能源紧张等问题,迫切需要开发低能耗,无污染的汽车。因此,电动汽车成为21世纪汽车技术研究的热点。 混合动力汽车与纯电动汽车是电动汽车研究的两个分支。经过近些年的发展,电动汽车技术日趋成熟,部分产品已进入商业化应用如Toyota Prius。目前,电动汽车传动系统多数在传统内燃机汽车的传动系基础上进行一些改变,进而将电动机及电池等部件加入总布置中。这种布置难以充分发挥电动汽车的优势。为使电动汽车对传统内燃机汽车形成更大的竞争优势,设计出适合电动汽车的底盘系统势在必行。而四轮独立驱动技术则可使电动汽车底盘实现电子化,主动化,大大提高电动汽车的性能。使电动汽车与传统汽车相比具有更强的竞争力。 1.2 四轮独立驱动技术的特点 电动汽车四轮独立驱动系统是利用四个独立控制的电动机分别驱动 汽车的四个车轮,车轮之间没有机械传动环节。其电动机与车轮之间可以是轴式联接也可以将电动机嵌入车轮成为轮式电机,车轮一般带有轮边减速器。这种驱
动系统与传统汽车驱动系统相比有以下特点: (一)传动系统得到减化,整车质量大大减轻。由电动机直接驱动车轮甚至两者集成为一体。这样省掉了离合器、变速器及传动轴等传动环节,传动效率得到提高,也更便于实现机电一体化。传动系质量在汽车整车质量中占有很大比重,机械传动系的消失,使汽车很好的实现了轻量化目标。另外,由于动力传动的中间环节减少,传动系的振动及噪声得到改善。甚至在采用纯电力驱动时,可实现无声行驶。这是美国海军的"RST-V"侦察车及其新一代军用"悍马"汽车采用四轮独立驱动技术的重要原因。 (二)与传统汽车相比,四轮独立驱动系统可通过电动机来完成驱动力的控制而不需要其他附件,容易实现性能更好的、成本更低的牵引力控制系统(TCS)、防抱死制动系统(ABS)及动力学控制系统(VDC)。传统汽车的TCS 与ABS系统均须对发动机与制动系进行联合控制才能达到较好性能,由于机械系统的响应较慢,且受制动器,液压管路及电磁阀的延迟等因素影响,传统内燃机汽车的ABS系统与TCS系统的实际时间延迟达50~100ms。限制了TCS系统与ABS系统的性能提高,而且增加能耗。与内燃机相比,无论在加速还是减速,电动机转矩响应都非常快且容易获得其准确值,这对TCS、ABS、VDC系统来说是非常重要的。因此电动机作为ABS、TCS及VDC系统的执行器是非常理想的。 (三)对各车轮采用制动能量回收系统,则可大大提高汽车能量利用效率,且与采用单电动机驱动的电动汽车相比,其能量回收效率也获得显著增加。这对提高电动汽车续驶里程是很重要的。 (四)实现汽车底盘系统的电子化、主动化。现代汽车驱动系统布置
电动汽车驱动电机类型种类和结构原理图 随着电动汽车行业的发展,各大汽车厂商纷纷开发了自家的电动车型。在雨后春笋般的的电动汽车市场,大家在看车的时候,厂商均推出了各自车型应用的电机。到底不同的电机有什么差别,下面本文就来讲讲新能源汽车电机的基础知识,介绍各种电机在电动汽车应用特点。 一、什么是电机? 所谓电机,就是将电能与机械能相互转换的一种电力元器件。当电能被转换成机械能时,电机表现出电动机的工作特性;当机械能被转换成电能时,电机表现出发电机的工作特性。大部分电动汽车在刹车制动的状态下,机械能将被转化成电能,通过发电机来给电池回馈充电。
二、电动汽车应用驱动电机特点 基于电动汽车的特点,对所采用的电机也有较高的要求。为了提升最高时速,电机应有较高的瞬时功率和功率密度(W/kg);为了增加1次充电行驶距离,电机应有较高的效率;而且电动汽车是变速工作的,所以电机应有较高的高低速综合效率;此外有很强的过载能力、大的启动转矩、转矩响应要快。电动车起动和爬坡时速度较低,但要求力矩较大;正常运行时需要的力矩较小,而速度很高。低速时为恒转矩特性,高速时为恒功率特性,且电动机的运行速度范围应该较宽。另外,电机还应具备坚固、可靠,有一定的防尘防水能力,且成本不能过高。 目前,从现已成熟的电机技术来看,开关磁阻电机在各个技术特性方面似乎很符合电动车的使用需要,但尚未得到广泛应用;而现今永磁同步电机在电动汽车行业应用较广泛;现在较为知名的特斯拉Model系列均采用异步电机。此外,如果按电流类型划分还可分为直流电机和交流电机两种。下面根据转速、功率密度、体积等多方面特性参数对比来了解4种较为典型的驱动电机特点。
电动汽车用驱动电机系统的现状及发展趋势 中国汽车技术研究中心窦汝振李磊宋建锋 摘要:介绍了我国电动汽车用驱动电机系统的研发现状,以及车用系统与普通工业用系统间的差异,指出了发展趋势。 1 引言 我国汽车工业的发展面临着来自能源安全、环境保护和气候变化等可持续发展要求的多重挑战。随着近几年汽车保有量的快速增加,汽车能源消耗增长呈现加速趋势,进一步加剧了我国石油供需矛盾。在当前石油资源日益紧张,价格不断攀升的国际形势下,发展电动汽车特别是混合动力汽车是缓解我国石油资源短缺现状的有效途径,也是增强我国汽车工业核心竞争力的重大战略举措。 经过“八五”、“九五”规划的实施,特别是“十五”国家863电动汽车重大专项,我国已实现了官、产、学、研的资源整合,具有了电动汽车用驱动电机系统自主研发能力。在国家“三纵三横”总体布局中(如附图所示),驱动电机及其控制系统被列为“三横”中的共性技术之一。 附图国家“十五”电动汽车重大专项布局示意 2 电动汽车用驱动电机系统的特点及分类 电动汽车对驱动电机系统的要求至少包括: (1)基速以下输出大转矩,以适应车辆的启动、加速、负荷爬坡、频繁起停等复杂工况; (2)基速以上为恒功率运行,以适应最高车速、超车等要求; (3)全转速运行范围内的效率最优化,以提高车辆的续驶里程; (4)结构坚固、体积小、重量轻、良好的环境适应性和高可靠性; (5)低成本及大批量生产能力。 电动汽车最早采用了直流电机系统,特点是成本低、控制简单,但重量大,需要定期维护。随电力电子技术、自动控制技术、计算机控制技术的发展,包括异步电机及永磁电机在内的交流电机系统体现出比直流电机系统更加优越的性能,目前已逐步取代了直流电机控制系统。特别是借助于设计方法、开发工具及永磁材料的不断进步,用于驱动的永磁同步电动机得到了飞速发展。 电动汽车中常用的交流电机主要有异步、永磁、开关磁阻三大类型,其特点如表1所示。
纯电动汽车驱动电机应用概述 郑金凤 胡冰乐 张翔 (福建农林大学机电工程学院,福建 福州 350002) 摘 要:介绍了目前纯电动汽车的发展状况,叙述了纯电动汽车驱动电机不同类型的特点及相关的控制方法。还介绍了一些目前应用比较广泛的驱动电机控制方法的主要内容及其所解决的相关问题。 关键词:纯电动汽车 驱动电机 矢量控制 直接转矩控制 中图分类号:TP202 文献标识码:A Driving Motor for Electric Vehicles Application Overview Zheng Jinfeng Hu Bingle Zhang Xiang (College of Mechanical and Electronic Engineering,Fujian Agriculture and Forestry University,Fuzhou 350002,China) Abstract: the current state of development of electric vehicles and features of the electric vehicles are described.Otherwise,driving motors and its control methods are narrated. Also major contents of some driving motor control methods applied extensively at present and its related issues are discussed. Key words:Electric vehicle,Drive motor,Vector control,Direct Torque Control 引言 由于环境保护越来越受消费者和政府的重视,以及能源价格的不断上涨,使得世界的汽车制造商都纷纷加大开新能源汽车开发力度。在去年金融危机的影响下,今年以来,由于全球大多主流的汽车市场纷纷出现衰退,尤其以美国和日本为代表的两大汽车市场出现了急剧下滑,使得美国和日本汽车厂家不得不加速原本保守的计划,从而重新刺激美国和日本等原有核心市场。而电动汽车以电能为能源,具有零排放无污染的突出优点,因此备受汽车界的推崇。在中国,政府今年也不断的推出各种政策来促进纯电动汽车的发展。回顾一下国际上电动汽车的发展史,连这次至少有四次,世界汽车工业界要启动纯电动汽车,但是前三次都失败了。前三次失败主要是因为电池。前三次基本上都是以铅酸电池为基础,由于他的比能量和比价格都比较差,所以没有得到推广。现在随着电池技术的不断发展,使得纯电动汽车的推广得以实现。现在纯电动汽车主要采用的是锂电池,锂电池的比能量是铅酸电池的八到十倍,且质量轻。今年比亚迪、丰田、奇瑞等汽车公司都将推出各自的纯电动汽车。并且电动汽车将可能慢慢成为汽车发展的一种趋势和必然[1,2,3]。 1各种电动汽车驱动电机的性能[4-11] 纯电动汽车关键的难点重点在于电池技术和驱动电机。电池技术已经在一定程度上得到了突破。下面主要讨论一下驱动电机的相关状况。 1.1电动汽车驱动电机控制的关键问题 电动汽车是以车载电源为动力,并采用电动机驱动的一种交通工具。电机及其驱动系统是电动汽车的核心部件之一,由于电动汽车在运行过程中频繁起动和加减速操作,对驱动系统的有着很高的要求。下面主要阐述控制过程中的一些关键问题: (1)用在电动汽车的电动机应具有瞬时功率大、过载能力强(过载3~4倍)、加速性能好,使用寿命长的特点。 (2)电动汽车用电动机调速范围应该宽广,包括恒转矩区和恒功率区。要求在低速运行时可以输出大恒定转矩,来适应快速起动、加速、负荷爬坡等要求;高速时能够输出恒定功率,能有较大的调速范围,以适应平坦的路面、超车等高速行驶要求。
新能源电动汽车电驱动 系统 标准化工作室编码[XX968T-XX89628-XJ668-XT689N]
现代电动汽车电驱动系统主要由四大部分组成:驱动电机、变速器、功率变换器和控制器。驱动电机是电气驱动系统的核心,其性能和效率直接影响电动汽车的性能。驱动电机和变速器的尺寸、重量也会影响到汽车的整体效率。功率变换器和控制器则对电动汽车的安全可靠运行有很大关系。 电驱动系统的由以下几个部分组成: 1.电动汽车驱动电机 选用小型轻量的高效电机,对目前电池容量较小、续驶里程较短的电动汽车现状显得尤为重要。早期电动汽车驱动电机大部分采用他励直流电机(DCM)。直流电机驱动系统改变输入电压或电流就可以实现对其转矩的独立控制,进行平滑调速,具有良好的动态特性,并且有成本低、技术成熟等优点。但是,直流电机的绝对效率低,体积、质量大,碳刷和换向器维护量大,散热困难等缺陷,使其在现代电动汽车中应用越来越少。随着电力电子技术、大规模集成电路和计算机技术的发展以及新材料的出现和现代控制理论的应用,机电一体化的交流驱动系统显示了它的优越性,如效率高、能量密度大、驱动力大、有效的再生制动、工作可靠和几乎无需维护等,使得交流驱动系统开始越来越多地应用于电动汽车中。目前在电动汽车中,主要采用永磁同步电机(PMSM)驱动系统、开关磁阻电机(SRM)驱动系统和异步感应电机(肼)驱动系统。 永磁同步电机(PMSM)是一种高性能的电机,具有体积小、重量轻、结构简单、效率高、控制灵活的优点,在电动汽车上得到了广泛的应用,是当前电动汽车用电动机的研发热点,是异步感应电机的最有力的竞争对手。目前,由日本研制的电动汽车主要采用这种电机,如Honda公司的EV Plus、Nissan公司的Altra和Toyota公司的RAV4及Prius车型等。但是,永磁电机的磁钢价格较高,磁性能受温度振动等因素的影响,有高温退磁等问题。 开关磁阻电机(SRM)是由磁阻电机和开关电路控制器组成的机电一体化新型调速电机。开关磁阻电机工作时,依次使定子线圈中的电流导通或截止,电流变化形成的磁场吸引转子的凸出磁极从而产生转矩。开关磁阻电机结构简单,成本较低,可靠性高,起动性能和调速性能好,控制装置也比较简单。然而在实际应用中,开关磁阻电动机存在着转矩波动大、噪声大、需要位置检测器等缺点,所以目前应用开关磁阻电机的驱动系统仍然很少,主要以Chloride公司的“Lucas”电动汽车为代表。 异步感应电机(M)具有结构简单、坚固、成本低、可靠性高、转矩脉动小、噪声小、转速极限高、无需位置传感器及免维护等特点,因而在电动汽车驱动电机领域里,是应用很广泛的一种无换向器电机。近年来,由IM驱动的电动汽车几乎都采用矢量控制和直接转矩控制。美国以及欧洲研制的电动汽车多采用这种电动机。 异步电机的矢量控制调速技术也比较成熟,其电驱动系统具有良好的性能,因此被较早地应用于电动汽车,目前仍然是电动汽车驱动系统的主流产品。迄今为止,美国“Impact’’系列、“ETX.2”型,日本“Cedric"、“OTwn"、“FEV"型,德国 “T4”、“190’’型等电动汽车均采用异步感应电机。异步电机的最大缺点是驱动电路复杂,效率比永磁电机和开关磁阻电机低,特别是在轻载运行时效率更低。因此,如何进一步提高异步电机的运行效率,己经成为人们关注的重要课题。 2.变速器
纯电动汽车的驱动电机系统详解 驱动电机系统是电动汽车三大核心系统之一,是车辆行驶的主要驱动系统,其特性决定了车辆的主要性能指标,直接影响车辆动力性、经济性和用户驾乘感受。一、驱动电机系统介绍驱动电机系统由驱动电机、驱动电机控制器(MCU)构成,通过高低压线束、冷却管路与整车其他系统连接,如图1所示。整车控制器(VCU)根据加速踏板、制动踏板、挡位等信号通过CAN网络向电机控制器MCU发送指令,实时调节驱动电机的扭矩输出,以实现整车的怠速、加速、能量回收等功能。电机控制器能对自身温度、电机的运行温度、转子位置进行实时监测,并把相关信息传递给整车控制器VCU,进而调节水泵和冷却风扇工作,使电机保持在理想温度下工作。驱动电机技术指标参数,如表1所示,驱动电机控制器技术参数如表2所示。1、驱动电机永磁同步电机是一种典型的驱动电机(图2),具有效率高、体积小、可靠性高等优点,是动力系统的执行机构,是电能转化为机械能载体。它依靠内置旋转变压器、温度传感器(图3)来提供电机的工作状态信息,并将电机运行状态信息实时发送给MCU。旋转变压器检测电机转子位置,经过电机控制器内旋变解码器解码后,电机控制器可获知电机当前转子位置,从而控制相应的IGBT功率管导通,按顺序给定子三个线圈通电,驱
动电机旋转。温度传感器的作用是检测电机绕组温度,并提信息供给MCU,再由MCU通过CAN线传给VCU,进而控制水泵工作、水路循环、冷却电子扇工作,调节电机工作温度。驱动电机上有一个低压接口和三根高压线(V、U、W)接口,如图4所示。其中低压接口各端子定义如表3所示,电机控制器也正是通过低压端口获取的电机温度信息和电机 转子当前位置信息。2、驱动电机控制器驱动电机控制器MCU结构如图5所示,它内部采用三相两电平电压源型逆变器,是驱动电机系统的控制核心,称为智能功率模块,它以IGBT(绝缘栅双极型晶体管)为核心,辅以驱动集成电路、主控集成电路。MCU对所有的输入信号进行处理,并将驱动电机控制系统运行状态信息通过CAN2.0网络发送给整车控制器VCU。驱动电机控制器内含故障诊断电路,当电机出现异常时,达到一定条件后,它将会激活一个错误代码并发送给VCU整车控制器,同时也会储存该故障码和相关数据。驱动电机控制器主要依靠电流传感器(图6)、电压传感器、温度传感器来进行电机运行状态的监测,根据相应参数进行电压、电流的调整控制以及其它控制功能的完成。电流传感器用于检测电机工作实际电流,包括母线电流、三相交流电流。电压传感器用于检测供给电机控制器工作的实际电压,包括动力电池电压、12V蓄电池电压。温度传感器用于检测电机控制系统的工作温度,包括IGBT模块的温度。驱动电
电动车驱动电机及其控制技术综述 摘要:简述了电动车驱动系统及特点,在此基础上详细分析并比较了电动车主要电气驱动系统,着重介绍了一种深埋式永磁同步电动机及其控制系统,最后简要概述了电动车电气驱动系统的发展方向。 1 概述 电动车是一种安全、经济、清洁的绿色交通工具,不仅在能源、环境方面有其独特的优越性和竞争力,而且能够更方便地采用现代控制技术实现其机电一体化的目标,因而具有广阔的发展前景。 现有电动车大致可以分为以下几个主要部分:蓄电池、电池管理、充电系统、驱动系统、整车管理系统及车体等。驱动系统为电动车提供所需的动力,负责将电能转换成机械能。无论何种电动车的驱动系统,均具有基本相同的结构,都可以分成能源供给子系统、电气驱动子系统、机械传动子系统三部分,其中电气驱动子系统是电动车的心脏,主要包括电动机、功率电子元器件及控制部分。如图1所示。 其中,电动车驱动系统均具有相同或相似的功能模块,如图2所示。 2 电动车电气驱动系统比较 电动机的类型对电气驱动系统以及电动车整体性能影响非常大,评价电动车的电气驱动系统实质上主要就是对不同电动机及其控制方式进行比较和分析。目前正在应用或开发的电动车电动机主要有直流电动机、感应电动机、永磁无刷电动机、开关磁阻电动机四类。由这四类电动机所组成的驱动系统,其总体比较如下表所示。 电动车电气驱动系统用电动机比较表 下面分别对这几种电气驱动系统进行较为详细地分析和阐述。 2.1 直流驱动系统
直流电动机结构简单,具有优良的电磁转矩控制特性,所以直到20世纪80年代中期,它仍是国内外的主要研发对象。而且,目前国内用于电动车的绝大多数是直流驱动系统。 但普通直流电动机的机械换向结构易产生电火花,不宜在多尘、潮湿、易燃易爆环境中使用,其换向器维护困难,很难向大容量、高速度发展。此外,电火花产生的电磁干扰,对高度电子化的电动汽车来说将是致命的。此外,直流电动机价格高、体积和重量大。随着控制理论和电力电子技术的发展,直流驱动系统与其它驱动系统相比,已大大处于劣势。因此,目前国外各大公司研制的电动车电气驱动系统已逐渐淘汰了直流驱动系统。 2.2 感应电动机驱动系统 2.2.1 感应电动机 电动车感应电动机与一般感应电动机相比较具有以下特征: (1)稳定运行时,与一般感应电动机工况相似。 (2)驱动电动机没有一般感应电动机的起动过程,转差率小,转子上的集肤效应不明显。 (3)运行频率不是50hz,而是远远在此之上。 (4)采用变频调速方式时,转速与极数之间没有严格对应关系。 为此,电动车感应电动机设计方面如下特点: (1)尽力扩大恒转矩区,使电动机在高速运转时也能有较高转矩。而要提高转矩,则需尽量减小定转子之间的气隙,同时减小漏抗。 (2)更注重电动机的电磁优化设计,使转矩、功率和效率等因素达到综合最优。 (3)减少重量、体积,以增加与车体的适配性。 2.2.2 控制技术 应用于感应电动机的变频控制技术主要有三种:v/f控制、转差频率控制、矢量控制。20世纪90年代以前主要以pwm方式实现v/f控制和转差频率控制,但这两种控制技术因转速控制范围小,转矩特性不理想,而对于需频繁起动、加减速的电动车不太适宜。近几年
龙源期刊网 https://www.doczj.com/doc/b72490740.html, 电动汽车用驱动电机发展现状与趋势分析 作者:张勇 来源:《时代汽车》2016年第12期 摘要:目前,我国电动汽车行业正在不断发展,相关的生产技术也逐步完善。本文中,笔者即将对电动汽车用驱动电机进行介绍,并就驱动电机目前的发展状况以及在将来一段时间的发展趋势作出相关分析。 关键词:电动汽车;驱动电机;现状;趋势 1电动汽车用驱动电机概述 目前,电动汽车的不同特性对于驱动电机提出了不同类型的要求。其中,对速度要求较高的电动汽车,要求其电机的瞬时功率及功率密度值较高;而要求电池使用周期较长,充电后可以行使更远距离的电动汽车,要求电机的效率应相对较高;此外,电动汽车还要求驱动电机具有比较理想的高低速综合效率,用材坚固,耐用性强,且具有理想的防水性能,性价比高等特性。依据上述要求,目前国内设计生产的比较常见的驱动电机主要包括下述4种类型。 1.1直流有刷电机 直流有刷电机是一种采用直流供电的驱动电机,是最早研发并使用的电动汽车用驱动电机类型,且目前在很多类型的电动汽车中仍旧在广泛使用。直流有刷电机最大的优势在于控制特性较好,简单易于操作,且目前国内的生产技术较为成熟,质量比较稳定。 然而,直流有刷电机之所以后来逐步为其他类型的驱动电机所取代,正是由于其也存在着一些比较突显的缺陷。首先,由于直流有刷电机具有电刷及机械换向器两个结构,导致其电机过载能力及速度得不到有效的提高,且使用过程中对零部件的维护成本较高。此外,直流有刷电机的损耗主要发生在转子部分,这便导致产生的热量散失难度较大,对转矩质量比参数需要进一步优化。第三,直流有刷电机在运行过程中,电刷容易因摩擦产生火花,从而形成电磁干扰对电动汽车的正常运行造成不利影响。第四,由于采用的是机械换向器,因此会对电机的容量、转速等性能造成限制,越来越无法满足用户对于驱动电机的需求。 1.2感应电机 目前电动汽车中最为常用的就是交流三相感应电机。此类电机的定子和转子是通过对硅钢片进行叠压后制成的,没有其他零部件接触。具有结构简单,性能稳定,耐用性能优良等特点。此外,该电机的功率范围较广;可以通过空气进行冷却,也可以通过液体冷却;同时,对于周边环境具有很好的适应性能。相比于其他类型的驱动电机,感应电机的质量小,价位低,性价比高,并且保养及维修成本也相对较低。
1.我国电动汽车发展概况 1.1 产业背景 1.2 产业政策 1.3 发展状况 1.3.1 技术状况 1.3.2 产业化状况 1.3.3 产品状况 1.3.4 国内主要生产企业及其产品明细表 1.4 发展方向 1.4.1 未来趋势 1.4.2 专家评述 2.我国发展电动汽车的相关政策 2.1 国家发展电动汽车的相关政策(按出台时间、名称、主要内容列表) 2.2 各省市发展电动汽车的相关政策(对北京、山东、湖南、湖北、河南、安徽、天津等分述之) 2.3 电动汽车技术支持的相关单位与组织 3.电动汽车驱动系统与驱动电机 3.1 电动汽车对其驱动系统的主要技术要求 3.2 电动汽车驱动系统的分类及其说明 3.3 电动汽车驱动电机的分类及其技术指标汇总 3.4 国内电动汽车研发单位及其研发情况 3.5 电动汽车驱动电机发展方向 4.技术方案 4.1 永磁一磁阻同步电机先进性与可行性 4.2 永磁一磁阻同步电机的优越性 4.3 永磁一磁阻同步电机现有工作基础 5.技术路线 6.合作组织 7.投资估算 8.其他
国外电动汽车及其驱动系统(本网页可阅览) 1.电动汽车的技术特征 1.1 电动汽车的基本概念和基本分类 电动汽车是指以车载电源为动力,用电机驱动车轮行驶,符合道路交通、安全法规各项要求的车辆。它使用存储在电池中的电来发动。电动汽车主要有纯电动汽车、混合动力电动汽车和燃料电池电动汽车3种类型. 纯电动汽车 纯电动汽车是完全由二次电池(如铅酸电池、镍镉电池、镍氢电池或锂离子电池等)提供动力的汽车。 混合动力电动汽车 一般是指采用内燃机和电动机两种动力,将内燃机与储能器件(如高性能电池或超级电容器) 通过先进控制系统相结合, 提供车辆行驶所需要的动力, 混合动力电动汽车并未从根本上摆脱交通运输对石油资源的依赖。因此,混合动力电动汽车是电动汽车发展过程中的一种过渡车型。 燃料电池车 燃料电池车是利用氢气和氧气(或空气)在催化剂的作用下直接经电化学反应产生电能的装臵, 具有完全无污染(排放物为水)的优点, 1.2电动车的基本特点 概括来讲, 电动汽车与内燃机汽车相比有以下优点 (1)效率高:对能源的利用,电动汽车的总效率至少在19%以上(采用燃料电池时效率远高于这一数值),而内燃机汽车效率低于12%,由此可见, 电动汽车更加节能。 (2)环境污染小: 电动汽车排出的废气非常少甚至不排出废气, 产生的废热也明显少于内燃机汽车. (3)可使用多种能源: 可直接利用电厂输出的电能,也可以通过太阳能、化学能、机械能转化而获得电能。 (4)噪音低: 即使靠近正在高速运转的电动机也不会感觉到让人不舒服的噪音, 而内燃机的噪音则非常大。 (5)结构简单,使用维修方便,操作控制易实现自动化。 三种类型电动汽车的比较如附表所示
电动汽车用驱动电机系统的现状及发展趋势
电动汽车用驱动电机系统的现状及发展趋势 中国汽车技术研究中心窦汝振李磊宋建锋 摘要:介绍了我国电动汽车用驱动电机系统的研发现状,以及车用系统与普通工业用系统间的差异,指出了发展趋势。 1 引言 我国汽车工业的发展面临着来自能源安全、环境保护和气候变化等可持续发展要求的多重挑战。随着近几年汽车保有量的快速增加,汽车能源消耗增长呈现加速趋势,进一步加剧了我国石油供需矛盾。在当前石油资源日益紧张,价格不断攀升的国际形势下,发展电动汽车特别是混合动力汽车是缓解我国石油资源短缺现状的有效途径,也是增强我国汽车工业核心竞争力的重大战略举措。 经过“八五”、“九五”规划的实施,特别是“十五”国家863电动汽车重大专项,我国已实现了官、产、学、研的资源整合,具有了电动汽车用驱动电机系统自主研发能力。在国家“三纵三横”总体布局中(如附图所示),驱动电机及其控制系统被列为“三横”中的共性技术之一。 附图国家“十五”电动汽车重大专项布局示意 2 电动汽车用驱动电机系统的特点及分类 电动汽车对驱动电机系统的要求至少包括: (1)基速以下输出大转矩,以适应车辆的启动、加速、负荷爬坡、频繁起停等复杂工况; (2)基速以上为恒功率运行,以适应最高车速、超车等要求; (3)全转速运行范围内的效率最优化,以提高车辆的续驶里程; (4)结构坚固、体积小、重量轻、良好的环境适应性和高可靠性; (5)低成本及大批量生产能力。 电动汽车最早采用了直流电机系统,特点是成本低、控制简单,但重量大,需要定期维护。随电力电子技术、自动控制技术、计算机控制技术的发展,包括异步电机及永磁电机在内的交流电机系统体现出比直流电机系统更加优越的性能,目前已逐步取代了直流电机控制系统。特别是借助于设计方法、开发工具及永磁材料的不断进步,用于驱动的永磁同步电动机得到了飞速发展。 电动汽车中常用的交流电机主要有异步、永磁、开关磁阻三大类型,其特点如表1所示。
摘要:近年来,环境和能源问题正引起人们的高度重视,因此研发节约能源、少污染甚至无 污染的绿色汽车已成为全球的热点。驱动电机作为纯的核心零部件,其性能直接关系到的动 力性和能源转化效率,同时还需要满足汽车结构尺寸的限制及复杂工况下的运行条件。本文 重点对驱动电机进行介绍,并对驱动电机目前的发展现状进行分析。 0引言 纯指仅由电能驱动的,我国2012年发布的《节能与产业发展规划(2012-2020年)》中所 指的纯为符合国家“双80”标准的。纯电动主要包括动力电池及电池管理技术、驱动电机及其 控制技术、整车控制技术等。受限于电池技术的发展,目前面临的最大问题主要为续航里程 及成本问题,在电池能量密度低这一“瓶颈”问题没有取得重大突破之前,提高驱动电机系统 的效率显得尤为重要。 1电动汽车驱动特点分析 驱动电机作为纯的核心零部件,其性能直接关系到的动力性和能源转化效率,同时还需要 满足汽车结构尺寸的限制及复杂工况下的运行条件。因此,除了要求驱动电机效率高、重量轻、尺寸小、功率密度大、扭矩密度大、可靠性高以及成本低以外,还必须能够满足汽车的 频繁启动、停车、爬坡、急加速、急减速和倒车等复杂工况要求。这就要求驱动电机还需要 具备宽广的调速范围和较大的过载能力,以满足低速时高启动扭矩和爬坡能力,高速巡航时 恒功率输出能力。同时为进一步提高的续驶里程,还要求驱动电机具有能量回收功能,即在 车辆减速或者制动时将车辆的部分动能回收,转化为电能存储到动力电池中。 综合上述要求及特点,目前比较常见的可作为驱动的电机主要有四种:直流有刷电机、交 流异步感应电机、开关磁阻电机、永磁同步电机。 1.1直流有刷电机 直流有刷电机因控制简单、生产技术成熟在发展早期得到了广泛的采用。但因其结构上存 在电刷和换向器而限制了电机的转速和过载能力,同时其运转时会产生火花,可靠性较差, 需要经常维护保养,目前在驱动系统中已经被淘汰。 1.2交流异步感应电机 交流异步感应电机与直流电机相比,效率高、功率大、结构简单,无电刷和换向器,可靠 性高、便于维护。但与永磁电机相比,其存在损耗大、功率密度低、发热量大、功率因数低 等缺陷,在中的应用也逐渐被永磁电机所取代。 1.3开关磁阻电机 开关磁阻电机是近年来新研发的一种电机,具有结构简单、运行效率高、易于散热、耐高 温以及维护方便等显著特点,能够较好地满足的需求。但其扭矩脉动严重,电机运行噪声大,与永磁同步电机相比效率和功率密度均偏低,限制了其在中的应用。 1.4永磁同步电机 永磁同步电机采用永磁体直接励磁,具有体积小、无励磁损耗、效率和功率密度高、功率 因数高、转矩脉动小、振动和噪声小、可靠性高以及维护成本低等优点,已经逐渐取代其他 类型的电机作为的首选。但永磁材料在高温、振动以及过流的条件下,会产生不可逆的退磁 现象,这会降低永磁电机的性能。因此还需通过技术、工艺等方面的研究来提升永磁同步电 机的性能水平。
电动汽车的四种驱动电机比较 电动汽车主要是由电机驱动系统、电池系统和整车控制系统三部分构成,其中的电机驱动系统是直接将电能转换为机械能的部分,决定了电动汽车的性能指标。因此,对于驱动电机的选择就尤为重要。 新能源汽车具有环保、节约、简单三大优势。在纯电动汽车上体现尤为明显:以电动机代替燃油机,由电机驱动而无需自动变速箱。相对于自动变速箱,电机结构简单、技术成熟、运行可靠,甚至被视为中国在新能源汽车行业实现汽车工业“弯道超车”的希望领域之一。新能源电动汽车主要是由电机驱动系统、电池系统和整车控制系统三部分构成,其中的电机驱动系统是直接将电能转换为机械能的部分,决定了电动汽车的性能指标。因此,对于驱动电机的选择就尤为重要。 电动汽车的驱动电机要求有以下几个特点: ?宽广的恒功率范围,满足汽车的变速性能 ?启动扭矩大,调速能力强 ?效率高,高效区广 ?瞬时功率大,过载能力强 ?功率密度大,体积小,重量轻 ?环境适应性高,适应恶劣环境 ?能量回馈效率高 根据驱动原理,电动汽车的驱动电机可分为以下4种: 1、直流电动机 在电动汽车发展的早期,很多电动汽车都是采用直流电动机方案。主要是看中了直流电机的产品成熟,控制方式容易,调速优良的特点。但由于直流电动机本身 的短板非常突出,其自身复杂的机械结构(电刷和机械换向器等),制约了它的瞬 时过载能力和电机转速的进一步提高;而且在长时间工作的情况下,电机的机械结 构会产生损耗,提高了维护成本。此外,电动机运转时的电刷火花会使转子发热, 浪费能量,散热困难,还会造成高频电磁干扰,这些因素都会影响具体整车性能。 由于直流电动机的缺点非常突出,目前的电动汽车已经将直流电机淘汰。 2、交流异步电动机 交流异步电机是目前工业中应用十分广泛的一类电机,其特点是定、转子由硅钢片叠压而成,两端用铝盖封装,定、转子之间没有相互接触的机械部件,结构简 单,运行可靠耐用,维修方便。交流异步电机与同功率的直流电动机相比效率更高,质量约轻了二分之一左右。如果采用矢量控制的控制方式,可以获得与直流电机相 媲美的可控性和更宽的调速范围。由于有着效率高、比功率较大、适合于高速运转
驱动电机 实 训 报 告 汽工1302 黄祥吉
图给出三相BLDCM 控制系统的六开关逆变器拓扑图。根据无刷直流电机的特点,为了减小转矩脉动,提高电机控制性能,要求加在电机定子上的电流为方波,并与电机的梯形反电动势严格同步,每相电流导通120。表给出图所示的六开关逆变器的开关器件导通顺序。 由表可见,六开关逆变器中,根据开关器件的状态,可组成6个状态组合或电压矢量,即:(0,一1,1)、(1,一1,0)、(1,0,一1)、(0,1,一1)、(一1,1,0)、(一1,0,
1),其中,1表示上桥臂导通,一1表示下桥臂导通,0表示没有管子导通。如(0,一1,1)表示B相的下桥臂和C相的上桥臂导通,即VS5,Vs6导通,A相处于不导通状态。这样在任何时刻总是只有两相处于导通状态,即任何时刻总有一相的两个开关器件不参与工作。开关磁阻电机的控制系统。 开关磁阻电机作为一种新型调速电机,兼有直流和交流调速的优点,适用的领域很广。它是由磁阻电机与电子开关驱动控制电路组成一体的能量换转机构。 如图所示为四相的开关磁阻电机。图表示导通顺序A、B、C、D时定转子工作情况。图4a 表示V1导通,A相绕组通电,而其余的三相绕组断电,因此转子磁1.1′受到气隙中弯曲磁力线的切向磁拉力而产生转矩,使转子沿逆时针旋转,转子磁极1.1′向定子磁极AA′趋近,直到两者重合。此时,控制器据位置传感器的关断信号,去控制驱动器,关断V1,切断A 相绕组电流,紧接着控制器根据位置传感器的开、断信号,依次使V2、V3、V4通、断,使B、C、D相绕组顺序的通与断,使转子受同一方向转矩作用,沿逆时针的运行。若改变相电流大小,则可改变电机转矩和转速。 总之,国已经开发出了以上四种电机驱动系统,取得了很大的技术进步,已经在车辆上获得了应用。但是,还存在着需要改进之处。就交流感应电机电控系统而言,国的绝大多数电动效率在70%以上区域围占整个工作的区域还在80%以下;电机在低速运行过程中,输出转矩脉动性过大;在高速运转时可输出的转矩偏小,加载能力差,且转矩降落略大;甚至在一定转速围存在较大电磁振动(噪音),有待于进一步解决。四种电机电控系统的可靠性都有待进一步提高以适应产业化要求。
电动汽车电机控制器 一、电机控制器的概述 根据GB/T 18488.1-2001《电动汽车用电机及其控制器技术条件》对电机控制器的定义,电机控制器就是控制主牵引电源与电机之间能量传输的装置、是由外界控制信号接口电路、电机控制电路和驱动电路组成。 电机、驱动器和电机控制器作为电动汽车的主要部件,在电动汽车整车系统中起着非常重要的作用,其相关领域的研究具有重要的理论意义和现实意义。 二、电机控制器的原理 图1 汽车电机控制器原理图 电机控制器作为整个制动系统的控制中心,它由逆变器和控制器两部分组成。逆变器接收电池输送过来的直流电电能,逆变成三相交流电给汽车电机提供电源。控制器接受电机转速等信号反馈到仪表,当发生制动或者加速行为时,控制器控制变频器频率的升降,从而达到加速或者减速的目的。 三、电机控制器的分类 1、直流电机驱动系统 电机控制器一般采用脉宽调制(PWM)斩波控制方式,控制技术简单、成熟、成本低,但效率低、体积大等缺点。 2、交流感应电机驱动系统 电机控制器采用PWM方式实现高压直流到三相交流的电源变换,采用变频调速方式实现电机调速,采用矢量控制或直接转矩控制策略实现电机转矩控制的快速响应。
3、交流永磁电机驱动系统 包括正弦波永磁同步电机驱动系统和梯形波无刷直流电机驱动系统,其中正弦波永磁同步电机控制器采用PWM方式实现高压直流到三相交流的电源变换,采用变频调速方式实现电机调速;梯形波无刷直流电机控制通常采用“弱磁调速”方式实现电机的控制。由于正弦波永磁同步电机驱动系统低速转矩脉动小且高速恒功率区调速更稳定,因此比梯形波无刷直流电机驰动系统具有更好的应用前景。 4、开关磁阻电机驱动系统 开关磁阻电机驱动系统的电机控制一般采用模糊滑模控制方法。目前纯电动汽车所用电机均为永磁同步电机,交流永磁电机采用稀土永磁体励磁,与感应电机相比不需要励磁电路,具有效率高、功率密度大、控制精度高、转矩脉动小等特点。 四、电动控制器的相关术语 1、额定功率:在额定条件下的输出功率。 2、峰值功率:在规定的持续时间内,电机允许的最大输出功率。 3、额定转速:额定功率下电机的转速。 4、最高工作转速:相应于电动汽车最高设计车速的电机转速。 5、额定转矩:电机在额定功率和额定转速下的输出转矩。 6、峰值转矩:电机在规定的持续时间内允许输出的最大转矩。 7、电机及控制器整体效率:电机转轴输出功率除以控制器输入功率再乘以100%。 扩展阅读: WP4000变频功率分析仪应用于电动汽车电机试验 现行的电动汽车相关标准大全 如何选择电动汽车电池监测系统 hb
混合动力电动汽车中电力电子技术的应用综述 1 引言 电力电子技术是研究应用电力半导体器件实现电能变换和控制的学科,它是一门由电子、电力半导体器件和控制三者相互交叉而出现的新兴边缘学科。它研究的内容非常广泛,主要包括电力半导体器件、磁性材料、电力电子电路、控制集成电路以及由其组成的电力变换装置。目前,电力电子学研究的主要方向是[1]: (1)电力半导体器件的设计、测试、模型分析、工艺及仿真等; (2)电力开关变换器的电路拓扑、建模、仿真、控制和应用; (3)电力逆变技术及其在电气传动、电力系统等工业领域中的应用等。 电动汽车(ev)作为清洁、高效和可持续发展的交通工具,既对改善空气质量、保护环境具有重大意义,又对日益严重的石油危机提供了解决方法;同时,电动汽车作为电力电子技术的一个新的应用领域,涵盖了dc/dc和dc/ac的全部变换,是实用价值非常高的运用领域[2]。 2 混合动力电动汽车简介 当前世界汽车产业正处于技术革命和产业大调整的发展时期,安全、环保、节能和智能化成为汽车界共同关心的重大课题。为了使人类社会和汽车工业持续发展,世界各国尤其是发达国家和部分发展中国家都在研究各种新技术来改善汽车和环境的协调性。 电动汽车作为21世纪汽车工业改造和发展的主要方向,目前已从实验室开发试验阶段过渡到商品性试生产阶段,世界上许多知名汽车厂家都推出了具有高科技水平的安全或环保型概念车,目的是为了引导世界汽车技术的潮流。 2.1 各种类型电动汽车特点及其发展 根据所使用的动力源不同,电动汽车大致可分为三类:蓄电池电动汽车或纯电动汽车(battery elect ric vehicle)、以氢气为能源的燃料电池电动汽车(fuel cell electric vehicle)和混合动力电动汽车(h
新能源汽车电机驱动系统关键技术解析 内容来源网络,由“深圳机械展(11万㎡,1100多家展商,超10万观众)”收集整理! 更多cnc加工中心、车铣磨钻床、线切割、数控刀具工具、工业机器人、非标自动化、数字化无人工厂、精密测量、数控系统、3D打印、激光切割、钣金冲压折弯、精密零件加工等展示,就在深圳机械展. 近年随着我国交通事业的飞速发展,交通领域成为我国能耗增长最快的领域。能源危机和环境污染的加剧,使电动汽车研发成为世界汽车工业可持续发展的战略性项目,世界各国也普遍将发展电动汽车确立为保障能源安全和转型低碳经济的重要途径。1881 年,第一辆电动汽车由法国工程师古斯塔夫. 士维(GustaveTrouve)制造问世,它是采用铅酸蓄电池供电,由0.1 hp(英制马力,1 hp=745.7 W)的直流电机驱动的三轮电动汽车,整车及其驾驶员的重量约160 kg。两位英国教授在1883年制成了相似的电动汽车。因当时该应用技术尚未成熟到足以与马车竞争,因此这些早期构造并没有引起公众很多的注意。 20 世纪40 年代之后,半导体技术快速发展,随后出现的晶闸管、三极管,尤其是在20 世纪80年代问世的绝缘栅双极型晶体管(IGBT)为电机调速与控制提供了便利,同时伴以电力电子技术的快速发展,为以电能为能源的电机取代以石油为能源的内燃机提供了技术基础。 一、电动汽车分类 根据国标GB/T 19596-2004 电动汽车术语,电动汽车可分为由动动力电池提供能源的纯电动汽车、电机和内燃机共存的混合动力汽车和以燃料电池为能源的燃料电池
电动汽车,这三类电动汽车均采用一个及以上的电机驱动系统将电能转换为机械能,进而驱动汽车,同时回收刹车的制动能量,从而实现了能量利用率的提升。 1. 纯电动汽车 纯电动汽车由电机驱动汽车,能量完全由二次电池(如铅酸电池、镍镐电池、镍氢电池或锂离子电池)提供。由于一次石化能源的日趋匮乏,纯电动汽车被认为是汽车工业的未来。典型的纯电动汽车动力结构如图1 所示。电池组的电能通过充电系统在车辆行驶一定里程后进行补充。纯电动汽车的特点是车辆 实现零排放,不依赖汽油,完全采用电能驱动车辆,但是由于蓄电池的能量密度和功率密度比汽油或柴油低很多,因此纯电动汽车的连续行驶里程有限。 2. 混合动力汽车 混合动力汽车按动力总成结构及能量流传递方案不同,可分为串联、并联及混联三种混合动力方式。串联混合动力车辆中,发动机动力与电动机动力通过电气系统传递;并联和混联混合动力车辆中,发动机动力与电动机动力通过一个专门的机电耦合机构实现向车轮的传递,常用的机电耦合机构包括行星齿轮耦合、变速器耦合及离合器耦合等。 串联式混合动力系统的动力总成,发动机的机械能通过发电机转化为电能,电动机将电能转换为机械能传到驱动桥,驱动桥和发动机之间没有直接的机械连接。该方案的优点是系统控制简单,缺点是难以应对复杂路况,电池充放电压力较大,电池寿命要求较高。