直流电动机的模型
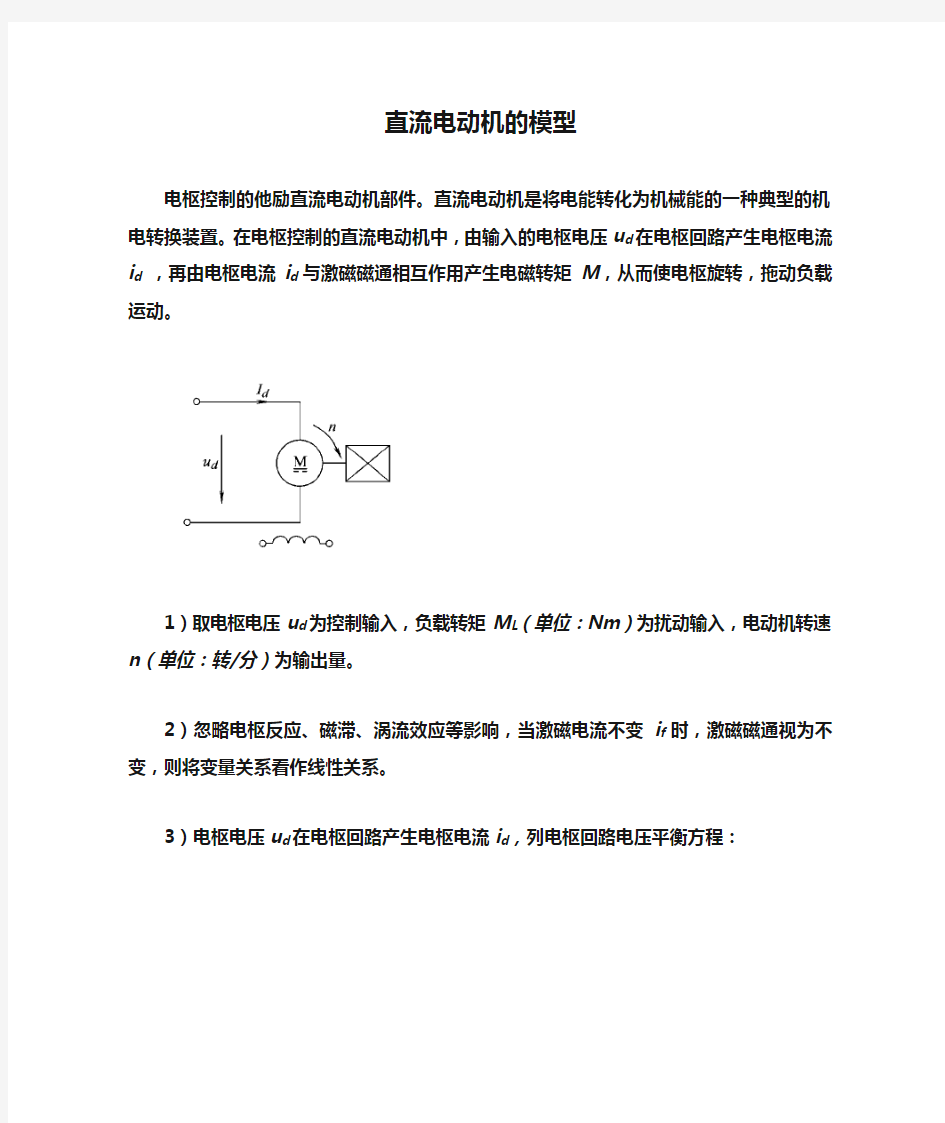
电枢控制的他励直流电动机部件。直流电动机是将电能转化为机械能的一种典型的机电转换装置。在电枢控制的直流电动机中,由输入的电枢电压u d 在电枢回路产生电枢电流i d ,再由电枢电流i d 与激磁磁通相互作用产生电磁转矩M ,从而使电枢旋转,拖动负载运动。
1)取电枢电压u d 为控制输入,负载转矩M L (单位:Nm )为扰动输入,电动机转速n (单位:转/分)为输出量。
2)忽略电枢反应、磁滞、涡流效应等影响,当激磁电流不变i f 时,激磁磁通视为不变,则将变量关系看作线性关系。
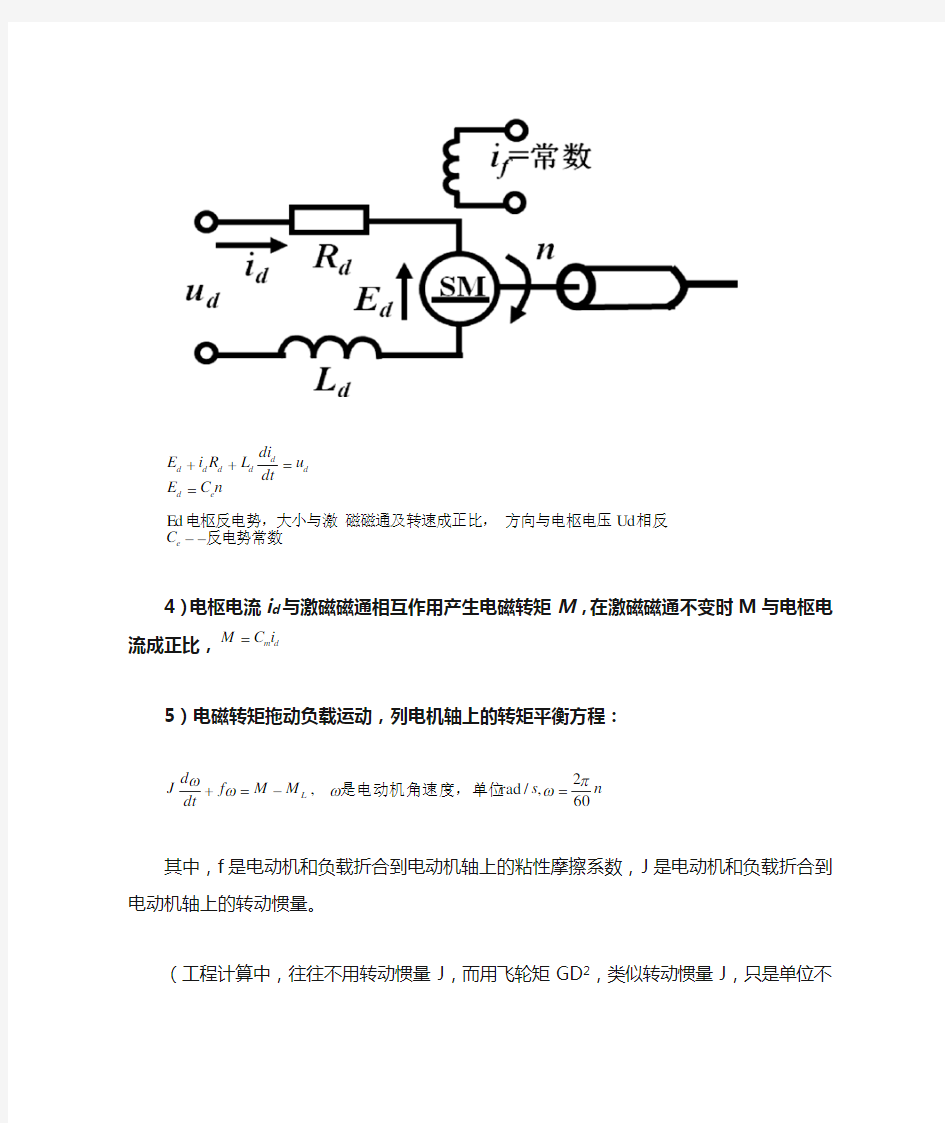
3)电枢电压u d 在电枢回路产生电枢电流i d ,列电枢回路电压平衡方程:
反电势常数
相反
方向与电枢电压磁磁通及转速成正比,电枢反电势,大小与激--==++e e d d d d
d d d C n C E u dt
di L R i E Ud Ed
4)电枢电流i d 与激磁磁通相互作用产生电磁转矩M ,在激磁磁通不变时M 与电枢电流成正比,d m i C M =
5)电磁转矩拖动负载运动,列电机轴上的转矩平衡方程:
n s M M f dt d J L 60
2,/rad ,πωωωω=-=+是电动机角速度,单位 其中,f 是电动机和负载折合到电动机轴上的粘性摩擦系数,J 是电动机和负载折合到电动机轴上的转动惯量。
(工程计算中,往往不用转动惯量J ,而用飞轮矩GD 2,类似转动惯量J ,只是单位不同,相差一个倍数。g GD D m m J 4/422
2===ρ
其中ρ---惯性半径(单位:米),D---惯性直径(单位:米),g---重力加速度,9.81m/s 2,
m---旋转部分的质量(单位:kg ),G---旋转部分的重量(单位:N )
n---转速(转/分) 则,转矩平衡方程变为:dt
dn GD dt dn g GD dt d J 375602422==πω )
(教材中,采用的是电动机的飞轮矩GD 2,且电动机空载,并忽略粘性摩擦,所以f 和M L 均为零,即为方程dt
dn GD M 3752=) 6)消去中间变量,整理可得电动机的微分方程
e
d e m d e m d d d C u n dt dn C C R GD dt n d C C R GD R L =++3753752222 e
d m d m C u n dt dn T dt n d T T =++22 7)在工程应用中,由于电枢电路电感Ld 较小,通常忽略不计,则上式可简化为一阶方程: e
d m C u n dt dn T =+ 画出电动机的动态结构图:
))()((1)(s E s U R s L s I u dt di L R i E d d d d d d d d
d d d -+=?=++ )()(s I C s M i C M d m d m =?=
)(375)(37522s M s GD s N dt
dn GD M =?= )()(E d s N C s n C E e e d =?=
若以角速度为输出量,则))()((1)(s M s M f
Js s M M f dt d J L L -+=Ω?-=+ωω
(此处Kb 与Ce 相差一个倍数) 若以角位移为输出量,)(1)(s s
s dt d Ω=Θ?=θ
ω
图2-53 位置随动系统 )(2)(30201c r c r k u k u θθθθ-=--=
SZ系列微型直流伺服电动机广泛应用于自动控制等系统中用作执行元件,也可用作驱动元件。 本系列电动机是我国自行设计的新系列产品,同老系列S系列产品相比,具有体积小、重量轻、力能指标高等特点,且产品系列化程度高,零部件通用化程度强。 按激磁方式本系列电动机分为他激(并激)、串激、复激三种。 按使用环境条件本系列电动机分为普通型和湿热带型两类。 安装结构型式 安装结构型式代号 机座号单轴伸双轴伸 机壳外圆安 装 A5AA536~130端盖凸缘安 装 A3AA336~130底脚安装A1AA190~130 型号说明 1、机座号用36、45、55、70、90、110、130表示,其相应机座外径为36、45、55、70、90、110、130mm。 2、产品代号用字母“SZ”表示电磁式直流伺服电动机。 3、产品规格序号由数字组成,在同一机座号中“01~49”表示短铁心产品“51~99”表示长铁心产品;“101~149"表示特长铁心产品。 4、激磁方式用字母表示,“C”为串激式,不注明者,即为他激(并激)式。 5、结构特征代号对基型结构其代号按表1规定。对派生结构其代号用H1、H2、H3……表示(按每个机座号依用户提出要求的顺序排列)。 SZ系列直流伺服电动机结构及电气线路图
型号 D c D 1 h 4 L 1 L D E 4 G d D 22 L 12 F 1 G 2 d 2 重量 (kg) 不大 于----- ( h6) - ( h11) ( H11) ( h6) - +( h11) ( H11) 55SZ01~ 495 56 9 1 5 1 2 74 2 光轴 55SZ51~ 99 1 01 70SZ01~ 49 7 07 4 5 7 2 1 14 6 1 46 75 2 27 70SZ51~ 99 8 2 1 24 70SZ101 ~149 9 4 1 36 2 90SZ01~ 499 09 5 1 27 8 1 68 1 6 4 1 6 27 90SZ51~ 99 1 47 110SZ01117111218121
直流电动机直接起动仿真 直流电动机直接起动时,起动电流很大,可以达到额定电流的10-20倍,由此产生很大的冲击转矩。适用Simulink对直流电动机的直接起动过程建立仿真模型,通过仿真获得直流电动机的直接起动电流和电磁转矩的变化过程。 设备及器件: 计算机,一台(MA TLAB)。 内容: 建立仿真模型;通过图形验证。 要求: 能够正确使用simulink建立仿真模型,并观察分析图形。 直流电动机直接起动仿真模型图 图中的模块有直流电源(DC Voltage Source)、理想开关、直流电动机、开关、增益、电阻(RLC branch)、示波器(scope)、信号分离模块(Demux)。仿真模型中通过理想开关模块控制直流电源的接通和断开,使用开关模块控制电机的转矩,使电机在起动过程中的转矩为空载起动,当转速达到设定值后,使电机工作再给定的负载转矩。 直流电机模块参数:
直流电源模块参数: 定时模块:0s时输出为0, 0.5s时输出为1 理想开关:
开关模块:增益模块 常量模块:
电阻设置: 仿真时间为5s
通过这次课程设计使我懂得了理论与实际相结合是很重要的,只有理论知识是远远不够的,只有把所学的理论知识与实践相结合起来,从理论中得出结论,才能真正为社会服务,从而提高自己的实际动手能力和独立思考的能力。在设计的过程中遇到问题,可以说得是困难重重,这毕竟第一次做的,难免会遇到过各种各样的问题,同时在设计的过程中发现了自己的不足之处,对以前所学过的知识理解得不够深刻,掌握得不够牢固。 这次课程设计终于顺利完成了,在设计中遇到了很多专业知识问题,最后在老师的辛勤指导下,终于游逆而解。同时,在老师的身上我们学也到很多实用的知识,在次我们表示感谢!
江苏金虎电器科技有限公司(原江苏科龙直 流电机制造厂) Z2系列小型直流电机介绍 Z2系列电机为一般工业用小型直流电机,其电动机适用于恒功率调速范围不大于2:1,过载能力不大于1.5倍额定转矩的店里拖动。可使用于金属切削机床,造纸,染织印刷,水泥等工业。发电机可作动力电源,照明或其他恒压供电。 为适应大范围的恒力矩调压调速及精密的速度控制,Z2系列发展了强风及强风带测速机的派生结构,其电气规格与Z2系列电动机完全一致,但带有骑式交流鼓风机或兼带鼓风机与ZYS永磁直流测速发电机,结构紧凑,可长期在低转速下运转,更进一步发挥了直流电机调速范围广,速度控制精密的优点。配合电动机恒力矩调速的需要,Z2系列发电机可制成各种励磁电压的他激发电机以便于调压,励磁电压根据不同的励磁电源可以是110V,220V,也可以是其他合适的电压。 此外Z2系列为适应其他各种不同的特殊需要,还派生了另外一些特殊规格: 1.Z2特殊电压电机:额定电压为180V,340V及440V的电动机适用 于单相及三相可控硅供电。或其他需要特殊电压电源的场合。2.根据特殊需要,Z2系列还可派生带补偿绕组的电动机和发电机, 对此过载倍数可增加至2.5倍额定转矩左右。电枢回路时间常数亦可减少,使用于大功率伺服系统或需要较大过载转矩的场合。
目前8至11号机座已有部分规格,如有需要,可继续发展。 上述四种特殊规格,其外形尺寸,转动惯量,重量与同机座的Z2一致。如有需要亦可制成带测速机的型式。 结构形式 Z2系列直流电机的基本品种采用防滴单轴伸,自扇冷的结构。适用于一般正常的工作环境。电机亦可制成双轴伸的。 电机的基本出轴方向面对出线盒发电机为右出轴,电动机为左出轴,基本旋转方向均为面对换向器逆时针旋转。 功率范围及工作条件 电动机的功率范围:0.4-200千瓦 额定电压:110伏和220伏 额定转速:3000,1500,1000,750及600转/分发电机的功率范围:0.6-185千瓦 额定电压:115伏和230伏特 额定转速:2850和1450转/分 在下列条件下,本系列电机均可连续使用。 (1)海拔不超过1000米 (2)周围空气温度不大于40摄氏度 在上述基本的电压,转速及本目录所附已派生的特殊规格之外,如有需要,亦可制造其他电压和转速的电机。如使用地点湿度较高可订购是热带电机。 励磁方式
第一章课程设计内容及要求 1. 直流电动机的机械特性仿真; 2. 直流电动机的直接起动仿真; 3. 直流电动机电枢串联电阻启动仿真; 4. 直流电动机能耗制动仿真; 5.直流电动机反接制动仿真; 6. 直流电动机改变电枢电压调速仿真; 7. 直流电动机改变励磁电流调速仿真。 要求:编写M文件,在Simulink环境画仿真模型原理图,用二维画图命令画仿真结果图或用示波器观察仿真结果,并加以分析
第二章直流电动机的电力拖动仿真绘制 1)直流电动机的机械特性仿真 clear; U_N=220;P_N=22;I_N=115; n_N=1500;R_a=;R_f=628; Ia_N=I_N-U_N/R_f; C_EPhi_N=(U_N-R_a*Ia_N)/n_N; C_TPhi_N=*C_EPhi_N; Ia=0;Ia_N; n=U_N/C_EPhi_N-R_a/(C_EPhi_N)*Ia; Te=C_TPhi_N*Ia; P1=U_N*Ia+U_N*U_N/R_f; T2_N=9550*P_N/n_N; figure(1); plot(Te,n,'.-'); xlabel('电磁转矩Te/'); ylabel('转矩n/rpm'); ylim([0,1800]); figure(2); plot(Te,n,'rs'); xlabel('电磁转矩Te/'); ylabel('转矩n/rpm');
hold on; R_c=0; for coef=1:;; U=U_N*coef; n=U/C_EPhi_N-(R_a+R_c)/(C_EPhi_N*C_TPhi_N)*Te; plot(Te,n,'k-'); str=strcat('U=',num2str(U),'V'); s_y=1650*coef; text(50,s_y,str); end figure(3); n=U_N/C_EPhi_N-(R_a+R_c)/(C_EPhi_N*C_TPhi_N)*Te; plot(Te,n,'rs'); xlabel('电磁转矩Te/'); ylabel('转矩n/rpm'); hold on; U=U_N;R_c=; for R_c=0::; n=U/C_EPhi_N-(R_a+R_c)/(C_EPhi_N*C_TPhi_N)*Te; plot(Te,n,'k-'); str=strcat('R=',num2str(R_c+R_a),'\Omega'); s_y=400*(4-R_c*; text(120,s_y,str);
直流电动机的人为机械特性 直流电动机可以通过改变电枢回路电阻、电枢电源电压、励磁磁通等方法使机械特性发生变化,以适应负载和工艺的要求。参数改变后对应的机械特性称为人为机械特性。下面以他励直流电动机为例说明三种人为机械特性。 (1)电枢回路串电阻的人为机械特性 电枢加额定电压U N ,每极磁通为额定值φN ,电枢回路串入电阻R 后,机械特性表达式为 T C C R R C U n N T e a N e N 2Φ+-Φ= 电枢串入电阻(R)值不同时的人为机械特性如图1所示。 图1 电枢回路串电阻的人为机械特性 图2 改变电枢电压的人为机械特性 显然,理想空载转速Φ=e C U n 0,与固有机械特性的n 0相同,斜率2 Φ=T e a C C R α与电枢回路电阻有关,串入的阻值越大,特性越倾斜。 电枢回路串电阻的人为机械特性是一组放射形直线,都过理想空载转速点。 (2)改变电枢电压的人为机械特性 保持每极磁通为额定值不变,电枢回路不串电阻,只改变电枢电压时,机械特性表达式为 T C C R C U n N T e a N e 2Φ-Φ= 电压U 的绝对值大小不能比额定值高,否则绝缘将承受不住,但是电压方向可以改变。改变电压大小的人为机械特性见图32所示。
显然,U 不同,理想空载转速Φ =e C U n 0随之变化,并成正比关系,但是斜率都与固有机械特性斜率相同,因此各条特性彼此平行。 改变电压U 的人为机械特性是一组平行直线。 (3)减少气隙磁通量的人为机械特性 减少气隙每极磁通的方法是用减小励磁电流来实现的。由于电动机磁路接近于饱和,增大每极磁通难以做到,改变磁通时,都是减少磁通。 图3 减少气隙磁通量的人为机械特性 电枢电压为额定值不变。电枢回路不串电阻,仅改变每极磁通的人为机械特性表达式为 T C C R C U n T e a e N 2Φ-Φ= 显然理想空载转速n 0 ∝Φ1,Φ越小,n 0越高;而斜率α∝21Φ ,Φ越小,特性越倾斜。改变每极磁通的人为机械特性如图3所示,是既不平行又不呈放射形的一组直线。
煤炭工程学院课程设计 题目:直流电动机转速控制系统 专业班级: 学生姓名: 学号: 指导教师: 日期:
摘要 当今社会,电动机作为最主要的机电能量转换装置,其应用范围已遍及国民经济的各个领域和人们的日常生活。无论是在工农业生产,交通运输,国防,航空航天,医疗卫生,商务和办公设备中,还是在日常生活的家用电器和消费电子产品(如电冰箱,空调,DVD等)中,都大量使用着各种各样的电动机。据资料显示,在所有动力资源中,百分之九十以上来自电动机。同样,我国生产的电能中有百分之六十是用于电动机的。电动机与人的生活息息相关,密不可分。电气时代,电动机的调速控制一般采用模拟法、PID控制等,对电动机的简单控制应用比较多。简单控制是指对电动机进行启动,,制动,正反转控制和顺序控制。这类控制可通过继电器,光耦、可编程控制器和开关元件来实现。还有一类控制叫复杂控制,是指对电动机的转速,转角,转矩,电压,电流,功率等物理量进行控制。 电机在各行各业发挥着重要的作用,而电机转速是电机重要的性能指标之一,因而测量电机的转速和电机的调速,使它满足人们的各种需要,更显得重要,而且随着科技的发展,PWM调速成为电机调速的新方式。 随着数字技术的迅速发展,微控制器在社会的各个领域得到了广泛的应用,由于数字系统有着模拟系统所没有的优势,如抗干扰性强、便于和PC机相联、系统易于升级维护。 本设计是以单片机AT89S52和L298控制的直流电机脉宽调制调速系统。利用AT89S52芯片进行低成本直流电动机控制系统的设计,能够简化系统构成、降低系统成本、增强系统性能、满足更多应用场合的需要。系统实现对电机的正转、反转、急停、加速、减速的控制,以及PWM的占空比在LCD上的实时显示。 关键词:直流电机;AT89S52;PWM调速;L298
安装直流电动机模型 我今天上午第三节我讲了《电动机》,对我来说这是一节很特殊的课。因为我也亲自体验了一把从准备材料,到制作课件的全过程。虽然时间准备有些伧足,课件中还有不完善的地方,但让我还是收获了许多。反思起来我觉得有以下几方面还是值得自我欣赏的: 1.应用多媒体课件演示电动机换向器的作用比实物演示可见度大,而且转速容易控制,学生看得更清楚,虽然教材中没有涉及到电动机的转速控制,但在课件中经历了调速这个过程,学生也就会有所了解。 2.教学中还是尽可能让学生参与到课堂之中,一般学生能分析得出的结论由学生得出来,教师不包办代替。 3.课前让学生去经历了制作小电动机的过程,学生的制作热情高涨,锻炼了学生的动手能力,合作精神,同时也让学生去探究了电动机连续转动的原理。 我自认为本节课还有很多不足之处: 1.是用课件代替演示实验还有值得商讨的地方,课件虽然可以模拟实验条件,但毕竟不是实验,我们只有在不得以的条件下才可用课件代替实验,只有在权衡利弊后使用。 2.应用多媒体的应用水平有限,还只能做ppt,对flash的制作要加强学习,争取能自己制作flash课件。 3.由于本节内容较多,在让学生经历探究实验的过程时间给得不够充分,没有让学生亲自动手操作,对少中下水平学生来说显得节奏过快。 4.课堂氛不够活跃,和平时相比今天学生的表现有差距,可能受到听课教师的影响,有的学生的问题在课堂上想说而没敢说,课后才和我交流。 5.本节课由于学生受力学知识水平的限制,在电动机的受力分析教师完全替代了学生,总显得不够严谨,课堂环节就显得不够流畅。 总之,我完成了在达标课中的任务,我做得有很多不足的地方,我愿聆听各位专家的意见,同时把的有待改进的地方晒一晒,听课教师可以从中吸取教训,这也算是我的的一点贡献吧! 1
他励直流电动机的机械特性 一、实验目的 了解和测定他励直流电动机在各种运转状态的机械特性 二、预习要点 1、改变他励直流电动机机械特性有哪些方法? 2、他励直流电动机在什么情况下,从电动机运行状态进入回馈制动状态?他励直流电动机回馈制动时,能量传递关系,电动势平衡方程式及机械特性又是什么情况? 3、他励直流电动机反接制动时,能量传递关系,电动势平衡方程式及机械特性。 三、实验项目 1、电动及回馈制动状态下的机械特性 2、电动及反接制动状态下的机械特性 3、能耗制动状态下的机械特性 四、实验方法 1、实验设备 2、屏上挂件排列顺序 D51、D31、D42、D41、D31、D44 按图1接线,图中M用编号为DJ15的直流并励电动机(接成他励方式),MG用编号为DJ23的校正直流测功机,直流电压表V1、V2的量程为1000V,直流电流表A1、A3的量程为200mA,A2、A4的量程为5A。R1、R2、R3、及R4依不同的实验而选不同的阻值。 3、R2=0时电动及回馈制动状态下的机械特性
(1) R 1、R 2分别选用D44的1800Ω和180Ω阻 值,R 3选用D42上4 只900 Ω串联共3600Ω阻值,R 4 选用D42上1800Ω再加上D41上6只90Ω串联共2340Ω阻值。 (2) R 1阻值置最小位置,R 2、R 3及R 4阻值置最大位置,转速表置正向1800r/min 量程。开关S 1、S 2选用D51挂箱上的对应开关,并将S 1合向1电源端,S 2合向2'短接端。 (3) 开机时需检查控制屏下方左、右两边的“励磁电源”开关及“电枢电源”开关都须在断开的位置,然后按次序先开启控制屏上的“电源总开关”,再按下“开”按钮,随后接通“励磁电源”开关,最后检查R 2阻值确在最大位置时接通“电枢电源”开关,使他励直流电动机M 起动运转。调节“电枢电源”电压为 220V ;调节R 2阻值至零位置,调节R 3阻值,使电流表A 3为100mA 。 (4) 调节电动机M 的磁场调节电阻R 1阻值,和电机MG 的负载电阻R 4阻值(先调节D42上1800Ω阻值,调至最小后应用导线短接)。使电动机M 的n=n N =1600r/min ,I N =I f +I a =1.2A 。此时他励直流电动机的励磁电流I f 为额定励磁电流I fN 。保持U=U N =220V ,I f =I fN ,A 3表为100mA 。增大R 4阻值,直至空载(拆掉开关S 2的2'上的短接线),测取电动机M 在额定负载至空载范围的n 、I a ,共取8-9组数据记录于表1中。 (5) 在确定S 2上短接线仍拆掉的情况下,把R 4调至零值位置(其中D42上1800Ω阻值调至零值后用导线短接),再减小R 3阻值,使MG 的空载电压与电枢电源电压值接近相等 (在开关S 2两端测),并且极性相同,把开关S 2合向1'端。 (6) 保持电枢电源电压U=U N =220V ,I f =I fN ,调节R 3阻值,使阻值增加,电动机转速升高,当A 2表的电流值为0A 时,此时电动机转速为理想空载转速(此时转速表量程应打向正向3600r/min 档),继续增加R 3阻值,使电动机进入第二象限回馈制动状态运行直至转速约为1900 r/min ,测取M 的n 、I a 。共取8~9组数据记录于表2中。 电枢电源 图 1他励直流电动机机械特性测定的实验接线图
小型直流电机输出扭矩的控制 摘要:本文介绍了小型直流电动机输出力矩的方法。 关键词:直流电动机力矩输出 一、概述 我们知道直流电动机电枢中的电流与其轴上的机械负载成正比,即负载加大,电动机电枢中的电流随之加大,当电枢中的电流增大到一定值时,若不加以限制,电枢就有被烧毁的危险。 下图是笔者设计的针对小型直流电动机(20W左右)的一种输出扭矩控制(过载保护)电路。电路有如下功能: 1、电机的最大输出扭矩可调。 2、当电机的最大输出扭矩超过设定值时,自动停机,并有红色发光二极管闪烁报警。 二、工作原理 1
2 3 2 1 8 4 U1A LM393 T 9014 D1IN4007 SB1LD1GREEN R12K 三位半数显电流表 M R322K R45.1K KA1 KA2 R21 KA1 Vin 1 G N D 2 Vout 3U278L12 R515K R62K B KA1 KM1 SB2LAMP KM1 R8180K R9470K R10180K TRIG 2 Q 3R 4 CVolt 5 THR 6 DIS 7 V C C 8 G N D 1 U3 555 EC247μKM1 R112K D3RED KM1+24V KA2 KA3 KA2 R7 6.8K 开关电源 AC220V DC24V TRIG 2 Q 3R 4 CVolt 5 THR 6 DIS 7 V C C 8 G N D 1 U4 555 R12200K EC34.7μR136.8K T29014D21N4007EC14.7μ KA3 Vin 1 G N D 2 Vout 3 U578L12 EC447μ
实训三直流他励电动机机械特性 自动化0933班徐林 一.实验目的 了解直流电动机的各种运转状态时的机械特性 二.预习要点 1.改变他励直流电动机械特性有哪些方法? 2.他励直流电动机在什么情况下,从电动机运行状态进入回馈制动状态?他励直流电动机回馈制动时,能量传递关系,电动势平衡方程式及机械特性又是什么情况? 3.他励直流电动机反接制动时,能量传递关系,电动势平衡方程式及机械特性。 三.实验项目 1.电动及回馈制动特性。 2.电动及反接制动特性。 3.能耗制动特性。 四.实验设备及仪器 1.实验台主控制屏。 2.电机导轨及转速表 3.三相可调电阻900Ω(NMEL-03) 4.三相可调电阻90Ω(NMEL-04) 5.旋转指示灯及开关板(NMEL-05B) 6、直流电压、电流、毫安表(NMEL-06A) 7.电机起动箱(NMEL-09) 8.直流电机仪表、电源(含在主控制屏左下方,MMEL-18) 五.实验方法及步骤 1.电动及回馈制动特性 接线图如图5-1 M为直流发电机M01作电动机使用(接成他励方式)。 G为直流并励电动机M03(接成他励方式),U N=220V,I N=1.1A,n N=1600r/min; 直流电压表V1为MMEL-18中220V可调直流稳压电源自带,V2的量程为300V (NMEL-06A);
直流电流表mA 1、A 1分别为MMEL-18中220V 可调直流稳压电源自带毫安表、安倍表; mA 2、A 2分别选用量程为200mA 、5A 的毫伏表、安培表。 R 1选用900Ω欧姆电阻(NMEL-03) R 2选用180欧姆电阻(NMEL-04中两90欧姆电阻相串联) R 3选用3000Ω磁场调节电阻(NMEL-09) R 4选用2250Ω电阻(用 NMEL-03中两只900Ω电阻相 并联再加上两只900Ω电阻相串联) 开关S 1、S 2选用 NMEL-05B 中的双刀双掷开关。 按图5-1接线,在开启电源前,检查开关、电阻等的设置; (1)开关S 1合向“1”端,S 2合向“2”端。 (2)电阻R 1至最小值,R 2、R 3、R 4阻值最大位置。 (3)直流励磁电源船形开 关和220V 可调直流稳压电源船形开关须在断开位置。 实验步骤。 a .按次序先按下绿色“闭合”电源开关、再合励磁电源船 型开关和220V 电源船形开关, 使直流电动机M 起动运转,调 节直流可调电源,使V 1读数为U N =220伏,调节R 2阻值至零。 b .分别调节直流电动机M 的磁场调节电阻R 1,发电机G 磁场调节电阻R 3、负载电阻R 4(先调节相串联的900Ω电阻旋钮,调到零用导线短接以免烧毁熔断器,再调节900Ω电阻相并联的旋钮),使直流电动机M 的转速n N =1600r/min ,I f +I a =I N =0.55A ,此时I f =I fN ,记录此值。 c .保持电动机的U=U N =220V ,I f =I fN 不变,改变R 4及R 3阻值,测取M 在额定负载至空载范围的n 、I a ,共取5-6组数据填入表中。 表5-1 U N =220伏 I fN = 0.075 A I a (A ) 0.4 0.37 0.34 0.30 0.28 0.26 n (r/min ) 1782 1802 1807 1813 1818 1818 d .折掉开关S 2的短接线,调节R 3,使发电机G 的空载电压达到最大(不超过220伏),并且极性与电动机电枢电压相同。 e .保持电枢电源电压U=U N =220V ,I f =I fN ,把开关S 2合向“1”端,把R 4值减小,直至为零(先调节相串联的900Ω电阻旋钮,调到零用导线短接以免烧毁熔断器)。再调节R 3阻值使阻值逐渐增加,电动机M 的转速升高,当A 1表的电流值为0时,此时电动机转速为理想空载转速,继续增加R 3阻值,则电动机进入第二象限回馈制动状态运行直至电流接近0.8倍额定值(实验中应注意电动机转速不超过2100转/分)。 测取电动机M 的n 、I a ,共取5-6组数据填入表5-2中。 电动及回馈制动特性 图5-2 直流他励电动机I 图5-1 直流他励电动机机械特性测定接线图R 直 流电 机 励磁 电 源 R 1U 可调直 流稳压 电 源 S V 11 112f R 32S A G M A I a 21V 22 R 421直流电动机M01同步发电机M08mA 2mA 1
微型直流(交流)减速电机概述 微型直流(交流)减速电机系列产品是由JB系列微型齿轮减速器、电子调速器、可正反向运行的微型电动机三部分组成的机电一体化产品。整机通过对三大部分的不同组合,可获得不同使用性能的产品。整机既可利用齿轮减速箱获得任意固定转速,也可通过电子调速器达到无级调速的目的。本系列产品由于具备减速范围宽广、力能指标高、使用方便、运行可靠等特点,而被广泛应用于各类小型轻工机械、包装、食品、纺织、化妆(美容)机械、印刷设备、仪器及各种自动化设备、生产流水线上。JB系列微型齿轮减速器采用高精度齿轮,并配油封,O 型环密封式齿轮箱,采用润滑脂浴润方式,具有噪音低,使用寿命长、体积小、功率大等特点。减速范围宽广,减速比1:3~1:1500还可根据用户对转速的特殊要求,另行制作。配用的微型电动机分为:微型交流电动机(单相:220V、110V;三相:220V、380V)ZYT(SZ)系列微型直流电动机(机座号:55~110;电压:12V、24V、48V、110V、220V)。WZJ系列无刷直流电动机。配用调速器分为:TDK系列交流电子调速器;WK、SK系列直流无级调速器。调速平稳、无爬行现象,且能保证电动机的频繁正反转。 微型直流(交流)减速电机系列产品是由JB系列微型齿轮减速器、电子调速器、可正反向运行的微型电动机三部分组成的机电一体化产品。整机通过对三大部分的不同组合,可获得不同使用性能的产品。整机既可利用齿轮减速箱获得任意固定转速,也可通过电子调速器达到无级调速的目的。 本系列产品由于具备减速范围宽广、力能指标高、使用方便、运行可靠等特点,而被广泛应用于各类小型轻工机械、包装、食品、纺织、化妆(美容)机械、印刷设备、仪器及各种自动化设备、生产流水线上。JB系列微型齿轮减速器采用高精度齿轮,并配油封,O型环密封式齿轮箱,采用润滑脂浴润方式,具有噪音低,使用寿命长、体积小、功率大等特点。减速范围宽广,减速比1:3~1:1500还可根据用户对转速的特殊要求,另行制作。 配用的微型电动机分为:微型交流电动机(单相:220V、110V;三相:220V、380V)ZYT(SZ)系列微型直流电动机(机座号:55~110;电压:12V、24V、48V、110V、220V)。WZJ系列无刷直流电动机。配用调速器分为:TDK系列交流电子调速器;WK、SK系列直流无级调速器。调速平稳、无爬行现象,且能保证电动机的频繁正反转。
单片机原理及系统课程设计 专业: 班级: 姓名: 学号: 指导教师: ......... 2015年12月27日
基于单片机控制直流电动机 1 引言 通过一个学期的学习,我认为要学好单片机这门课程,不仅要认真学习课本知识,更重要的是要学会通过实践巩固学到的知识,本次课设中我们设计制作的题目是基于单片机的直流电动机的转速检测与PWM调制。 1.1 设计背景 PWM 直流电机应用对市场调查显示,目前各工业各产品都大量用到PWM 调速电机,直流调速电机对市场需求量是相当的大。 1.2直流电机的发展 1834 德国雅可比发明直流发动机1888 南斯拉夫裔美国特斯拉发明了交流电动机1821年英国科学家法拉第首先证明可以把电力转变为旋转运动。最先制成电动机的人,据说是德国的雅可比。他于1834年前后成了一种简单的装置:在两个U型电磁铁中间,装一六臂轮,每臂带两根棒型磁铁。通电后,棒型磁铁与U型磁铁之间产生相互吸引和排斥作用,带动轮轴转动。后来,雅可比做了一具大型的装置。安在小艇上,用320个丹尼尔电池供电,1838年小艇在易北河上首次航行,时速只有2.2公里,与此同时,美国的达文波特也成功地制出了驱动印刷机的电动机。 2 设计方案及原理 2.1 系统设计方案 本次设计用单片机输出PWM 到电机驱动电路H桥,通用按键调节电机的速度。用单片机定时器发生PWM 用按键改变定时初值,可以改变PWM的占空比从而改变速度。
主要研究内容: 1)硬件电路单片机最小系统、H桥驱动电路、按键模块、 2)软件程序用Proteus进行仿真加工,使用C语言编写程序。 2.2H桥原理图 图1H桥电路原理图 2.2.1H桥驱动电路 图2中所示为一个典型的直流电机控制电路。电路得名于“H桥驱动电路”是因为它的形状酷似字母H。4个三极管组成H的4条垂直腿,而电机就是H中的横杠(注意:图2及随后的两个图都只是示意图,而不是完整的电路图,其中三极管的驱动电路没有画出来)。 如图所示,H桥式电机驱动电路包括4个三极管和一个电机。要使电机运转,必须导通对角线上的一对三极管。根据不同三极管对的导通情况,电流可能会从左
直流电动机数学模型的建立
直流电动机数学模型的建立 4.1 数学模型的建立 建立电动机动态数学模型的方法的要点是:首先列写出电动机主电路电压平衡方程式,轴上力矩平衡方程式和励磁电路电压平衡方程式等基本关系式,加以整理,然后进行拉普拉斯变换,根据此变换,即可求出电动机的动态结构图和传递函数的表达式[1,10]。 图4—1 上图为一他励直流电动机的等效电路,其中: a U E----分别为电动机电枢端电压和反电势; d I f I ---电动机电枢电流和励磁电流; a R a L ---电枢电路电阻和电感; f R f L ---励磁电路电阻和电感; f U -------电动机的励磁电压; ω-------电动机的角速度; J--------电动机轴上的转动惯量; e T l T ----电动机转矩和负载阻转矩。 4.1.1 写出平衡方程式、拉普拉斯变换 由上图可写出下列基本关系式: a U -E= a R (1+a T S ?) d I e T -l T =J ?S ? ω
f U = f R ()f f I T S ??+1 E= ω ωφ???=??f e I M p K Te= d f d m I I M p I K ???=??φ 其中:a a a R L T = 为电枢电路时间常数;f f f R L T = 为励磁电路时间常数;p 为电动机磁极对数;M 为励磁绕组和电枢绕组的互感; 4.1.2 动态结构图 将S=d/dt 看作算子,则上述诸式也就是它们的拉氏变换。所以由上式可画出直流电动机的结构。如图4—2所示。 图4—2 如果将讨论的问题限制在稳态工作点附近的小偏差情况,经过化简,可得此时系统的增量方程为:d a a a I T S R E U ??+?=-)1( ω ??=-S J T T l e f f f f I T S R U ??+?=)1( 0Ω???+???=f f I M p I M p E ω 0 0d f d f e I I M p I I M p T ???+???= 为简化起见,式中表示增量的下标1已删去。由诸式可画出直流电动机在独立电枢电压和磁场控制下的动态结构图如下所示:
浅析:他励直流电动机的机械特性 在电源电压U 和励磁电路的电阻R f 为常数的条件下,表示电动机的转矩n 和转矩之间的关系n=f (T )曲线,称为机械特性曲线。利用机械特性和负载转矩特性可以确定拖动系统的稳定转速,在一定条件下还可以利用机械特性和运动方程式分析拖动系统的动态运动情况,如转速、转矩及电流随时间的变化规律。可见,电动机的机械特性对分析电力拖动系统的启动、调速、制动等运行性能是十分重要的。 下图是他励直流电动机的电路原理图,他励直流电动机的机械特性方程式,可由他励直 流电动机的基本方程式导出。由公式 , 和 导出机械特性方程式 ( 1-1 ) 他励直流电动机电路原理图 当电源电压U =常数,电枢回路总电阻R =常数,励磁磁通Φ=常数时,电动机的机械特性如下图所示,是一条向下倾斜的直线,这说明加大电动机的负载,会使转速下降。特性 曲线与纵轴的交点为n 0时的转速,称为理想空载转速。 他励直流电动机的机械特性 实际上,当电动机旋转时,不论有无负载,总存在有一定的空载损耗和相应的空载转矩, 而电动机的实际空载转速 将低于n 0。由此可见式(1-1)的右边第二项即表示电动机带负载后的转速降,用 表示,则 ( 1-2 ) 式中 β——机械特性曲线的斜率。 β越大, 越大,机械特性就越“软”,通常称β大的机械特性为软特性。一般他励电动机在电枢没有外接电阻时,机械特性都比较“硬”。 机械特性的硬度也可用额定转速调整率△n N %来说明,转速调整率小,则机械特性硬度就高。 电动机的机械特性分为固有机械特性和人为机械特性 。 固有机械特性是当电动机的电枢工作电压和励磁磁通均为额定值,电枢电路中没有串入附加电阻时的机械特性,其方程式为 固有机械特性如下图中的 曲线 所示,由于 较小,故他励直流电动机固有机械特性较“硬”。 他励直流电动机串电阻时的机械特性 人为机械特性是人为地改变电动机电路参数或电枢电压而得到的机械特性,即改变公式(1-1)中的参数所获得的机械特性,一般只改变电压、磁通、附加电阻中的一个,他励电动机有下列三种人为机械特性。 (1) 枢串电阻时的人为机械特性 此时 ,人为机械特性的方程式 与固有特性相比,理想空载转速n 0不变,但是,转速降△n 增大 。R pa 越大,△n 也越大,特性变“软”,这类人为机械特性是一组通过 n 0 ,但具有不同斜率的直线。 如下图所示 (2) 改变电枢电压时的人为机械特性 a a a R I E U + =n E a Φe C =φa T em I C T =em T R U n 2T e e C C C ΦΦ-=Φ e 0C U n =0 n 'n ?em em T T R n βΦ==?2T e C C n ?em N a N N T R U n 2T e e C C C ΦΦ-=pa a N N R R R U U +===,,ΦΦem N pa a N N T R R U n 2T e e C C C ΦΦ+-=0=pa R N ΦΦ=
微型直流电机在汽车上的应用 编者摘要:电机的作用是把电能转换成机械能,带动设备运转。在轿车上,除启动发动机的起动机外,其余分布在车上各个地方的电机都是微型直流电机。 在过去,汽车微型电动机仅作为雨刮器、档风玻璃洗涤器、电动油泵、自动天线等部件总成的动力源,数量比较少。而现在的轿车着力追求乘用舒适性和自动操纵性,微型电机已成为现代轿车不可缺少的部件。有些轿车安装了20个以上微型直流电机,可活动的设备无论是做园周运动,或做横向摆动,或做直线移动,一般都有微型电动机做动力源。例如电动座椅坐垫的位置移动、靠背和头枕角度的变化、后视镜的摆动、照明大灯的洗涤、玻璃窗的开启关闭、电动车门锁的操纵、水箱冷却风扇的转动等等。 汽车微型直流电机,顾名思义就是小型化的直流电机,功率一般在100瓦以下。由于汽车运行的特殊要求和环境的严酷性,使用者对汽车微型电机的要求是苛刻的。对于电动机来讲,电机质量的高低除了设计构造和加工工艺外,关键在于机芯的磁性材料。目前轿车上使用的新型电动机采用了一种含稀有元素的永磁材料,其主要成份有铁、硼、钕等,它的神奇之处在于强磁性,不论加工成什么形状,磁性都比普通的铁磁材料强2~10倍,这意味着用这种永磁材料做成的电动机,功率大,体积小,重量轻,效率高,在车上大量使用这种微型电机,整车重量会相对减少,等于提高了承载能力。 通用汽车公司前总裁罗杰.史密斯曾经说过,现在汽车工业一天也离不开电磁材料,对于使用磁性材料的工业来说,电磁材料的重要性就象半导体材料对于电子工业一样,在这领域的每一项重大突破都有可能改变我们的生活。 汽车微型直流电机的职责是带动设备运动,因此一般要附带一套变换机构,做减速和变向作用。例如雨刮器电机伺服机构就是采用蜗轮蜗杆传动形式,将电轴转动减速和变向;中控门锁的电动机采用齿轮齿条传动形式,起到减速并将旋转改变为直线移动。这些形式是比较常用的变换机构。 现代轿车微型直流电机使用范围越来越大,在一些轿车ABS系统、电控悬挂系统、电控助力方向机和电子油门都要使用到微型直流电机,随着汽车电子化发展,微型电机也愈加重要。 本篇新闻来自网络,由本站编辑精心加工所得,转载请保留出处,更多精彩内容尽在:https://www.doczj.com/doc/b114115584.html,/
直流电机的特性和种类 2、 前面一章叙述的是由永久磁铁作定子、铁芯线圈作转子、带电刷的直流电动机的工作原理。通常称为“永磁式有刷”直流电动机。长期以来,这种电动机一直在被广泛地应用着。 除了永磁式有刷直流电动机外,还有其他几种直流电动机。一种是有永久磁铁和电刷,但其转子没有铁芯,称为“无铁芯”直流电动机;另一种是定子采用电磁线圈代替永久磁铁称为“电磁式有刷”(绕线式)直流电动机,这种电动机的转子同定子一样,都采用铁芯线圈产生工作磁场。 绕线式电动机有三种形式。定、转子线圈串联连接的称为“串励”电动机;并联连接的称为“并励”电动机;定子线圈一分两路,一路与转子串联连接,另一路与转子并联连接的称为“复励”电动机。 还有没有整流子和电刷的,根据电子切换原理控制定子电流的电动机称为“无刷”直流电动机;不连续旋转,而是以某一角度间歇转动的电动机称为“步进”电动机;不是旋转而是作直线运动的电动机称为“直线”电动机。其中,无刷电动机和步进电动机虽然可划分在直流电动机范畴,但是只给它们提供直流电源是不够的,还必须给它们配置类似于交流伺服电动机的电子开关电路。
为了说明电动机的原理,通常都是从永磁式有刷直流电动机的特性说起。’“输入电流和转矩成正比”是最基本的特性之一。电动机的转矩也就是旋转力矩来源于放置在磁场中的转子线圈所受的“电磁力”(参见第34页)。这个电磁力与磁场强度的强弱和流过线圈的电流的大小成正比。定子采用永久磁铁的电动机磁场强度一定,所以它的电磁力的大小只与电流的大小有关。也可以说电动机的输出转矩与转子电流成正比。 如果把上述转矩和电流的关系描绘成曲线,就会发现它是一条直线,通常还称为“线性”特性。通过这条曲线可以看出,转矩和电流始;终是沿着那条斜线变化。不管在曲线上哪一点,只要电流变化,转矩:就会跟着变化。 “转矩和转速成反比’是电动机的另一特性。电风扇和玩具车等,都是电动机驱
直流电机驱动模块 一、摘要 本直流电机采用集成芯片L298和由分立元件构成的驱动电路模块来驱动,控制端连接51单片机,由51单片机控制输出PWM 脉冲控制L298和分立元件驱动电路模块的输出和PWM 脉冲输出的方向,从而控制直流电机的转速大小和正反转。本次测试采用51最小系统板、L298驱动电路和分立元件驱动电路模块,对单片机进行编程间接控制直流电机的启停、转速大小和正反转。 关键字:直流电机、L298N 、AT89C51、PWM 二、L298芯片介绍 L298是SGS 公司的产品,比较常见的是15脚Multiwatt 封装的L298N ,内部同样包含4通道逻辑驱动电路。可以方便的驱动两个直流电机,或一个两相步进电机。 图为L298驱动芯片 L298N 可接受标准TTL 逻辑电平信号V SS ,V SS 可接4.5~7 V 电压。4脚V S 接电源电压,V S 电压范围V IH 为+2.5~46 V 。输出电流可达2.5 A ,可驱动电 感性负载。1脚和15脚下管的发射极分别单独引出以便接入电流采样电阻,形成电流传感信号。L298可驱动2个电动机,OUT1,OUT2和OUT3,OUT4之间可分别接电动机,本实验模块中我们选用驱动两台电动机。5,7,10,12脚接输入
控制电平,由单片机控制,控制电机的启停、正反转和速度大小。E nA ,E nB 接控 制使能端,可控制电机的停转,本实验模块中让其接电源正极使L298处于导通状态。 L298内部原理图 三、硬件设计 IN1 IN2 ENA OUT1OUT2OUT3OUT4 IN3IN4ENB 6V 动力电源
第六章直流電動機的特性及運用 一、直流電動機的分類: 二、直流電動機的基本概念: 1.轉矩T 2.反電勢E b 3.轉速n 4.電樞內生機械功率P m 5.速率調整率SR% 三、直流電動機的特性曲線: 1.轉矩特性曲線:表示輸出轉矩(T L)與負載電流(I L)的關係 2.轉速特性曲線:表示輸出轉速(n)與負載電流(I L)的關係 (一)外激式的特性及用途: (1)等效電路: (2)轉速特性: ○1無載時:I a很小(E b≒V),故轉速n= ○2負載↑,磁通Φ固定不變,E b=V-I a R a微微下降,因此轉速稍下降可視為定速電動機。 (3)轉矩特性: ∵T=KΦI a,若I a↑則T↑,故轉矩特性為一上升的直線。 (4)用途: 適用於調速範圍廣且需維持定速場合,如華德黎翁那德控制系統 中的直流電動機。 (二)分激式的特性及用途: (1)等效電路: (2)轉速特性:與外激式相似 運轉中若磁場突然斷路,則Φ=0、E b=0,轉速將增加到極大,而有飛脫之虞,因此需加裝保護設備。 (3)轉矩特性:與外激式相似
(4)用途: 分激電動機因轉速下降幅度極小,可視為定速電動機;而且可利用調整磁場電阻大小來改變轉速,因此又可視為調速電動機。 一般用於印刷機、鼓風機、車床。 (三)串激式的特性及用途: (1)等效電路: (2)轉速特性: ○1無載時:因I a=0,Φ=0,轉速相當高有飛脫之虞,故不可在無載 時運轉,且電動機與負載連接必須直接耦合不能使用皮帶,否則 可能因皮帶斷裂而有飛脫之虞。通常會加裝離心開關作保護。 ○2輕載時: Φ未飽和,ΦαI a 轉速n=V-I a(R a+R s)/KΦ,nα1/I a為一條雙曲線。 ○3重載時: Φ已飽和,Φ與I a無關為一定值 轉速n=V-I a(R a+R s)/KΦ,nαV-I a(R a+R s) 為一條下降直線。 (3)轉矩特性: ○1輕載時: Φ未飽和,ΦαI a 轉矩T=KΦI a→TαI a2為一條拋物線 ○2重載時: Φ已飽和,Φ與I a無關為一定值 轉矩T=KΦI a→TαI a為一條上升直線 (4)用途: ○1負載變動時I a,隨之改變,使轉速有相當大的變動,是為變速電 動機,速率調整率為正值。 ○2具有高轉速低轉矩,低轉速高轉矩的特性,因此有向電源取用恒 定功率的特性。 ○3主要用於需高啟動轉矩或高轉速的場合,如起重機、電車、果汁 機、吸塵器等。 (四)複激式電動機 1.積複激電動機: (1)等效電路:
教案首页(宋体小四号字) 任务二并励(他励)直流 电动机机械特性 第几节项目五 班级机电时数2课时 教学目标1. 知识目标:熟悉并励直流电动机的固有机械特 性。 2. 能力目标:熟悉并励直流电动机的人为机械特 性。 3.情感目标:培养学生积极向上的学习态度,培养学生接受新知识的能力。 教学内容1. 并励直流电动机的固有机械特性 2. 并励直流电动机的人为机械特性 教材分析重点 通过自主探究,让学生掌握并励直流 电动机的人为机械特性。 难点 对并励直流电动机的固有机械特性的掌握。 教学方法问题引导 动画演示 教学准备多媒体
性。 2.帮助学生了解并励直流电动机的人为机械特 性。 3.帮助学生建立把理论与实践结合起来的抽象思维方 式。 第二部分:授课 ………………………………………… 第 一 课 时 并励直流电动机的机械特性是指电动机在电枢电压U,励磁电流 I L,电枢回路总电阻R a为恒值的条件下,电动机转速与电磁转矩T的关 系。 一、机械特性方程式 并励直流电动机的电路如图5-4所示。 图5-4 并励直流电动机电路图 并励直流电动机的机械方程式可以从公式,得到: (5-3) 再把公式代入上式,得:
(5-4) 其中,称为理想空载转速, 机械特性曲线如图5-5所示,是一条稍向下倾斜的直线,其斜率为。这 说明加大电动机负载会使转速下降。 图5-5 并励电动机的机械特性 二、固有机械特性 固有机械特性是当电动机的电枢工作电压和励磁磁通均为额定 值,电枢电路中没有串入附加电阻时的机械特性,其方程式为: (5-5) 固有机械特性如图5-6中的曲线 所示,由于较小,故并励直流电 动机固有机械特性为硬特性,这种特性适用与负载变化时要求转速比 较稳定的场合,经常用金属切削机床、造纸机械等要求恒速的地方。 必须注意的是:当磁通过分削弱后,如果负载转矩不变,将使电动机 电流大大增加而严重过载。另外,当=0时,从理论上说,电动机的空 载转速将趋于,实际上励磁电流为零时,电动机尚有剩磁,这时转速 虽不趋于,但会升到机械强度所不允许的数值,通常称为“飞车”,