梅索尼兰MASONIELAN SV-II阀门定位器调校步骤
第一种方法:
1.在**DEVICE SETUP**(设备设置)菜单模式选择第3项**SETUP WIZARD**(设备向导)选项菜单并进入**AIR ACTION CONFIGURARTION**菜单。
2.在AIR ACTION CONFIGURARTION菜单选择第1项SKIP THIS TASK (跳过)进入FIND VALVE STOPS菜单。
3.在FIND VALVE STOPS菜单下选择第2项RUN AUTO STOPS作为定位器的全开全关校验,完成后进入AUTO TUNE菜单。
4.在AUTO TUNE菜单下选择第2项RUN AUTO TUNE做定位器PID参数校验,完成后进入RESET TO FACTORY DEFAULT 菜单。
5.在RESET TO FACTORY DEFAULT 菜单下选择第1项SKIP THIS TASK(跳过)返回初始菜单。
注意:SVI II AP定位器用HART375校验时,HART375必须经过升级后才能使用。
第二种方法:
1.将定位器安装到阀门,接上正常的电气信号,连接HART375与定位器,进入NORMAL MODE 菜单模式。
2.在NORMAL MODE菜单下选择第4项MANUAL MODE MENU(手动模式菜单)并进入。
3.在MANUAL MODE MENU(手动模式菜单)下选择第3项CALIBRATE MENU(校验菜单),并进入。
4.在CALIBRATE MENU (校验菜单)下选择第1项RANGE并进入CHOOSE菜单。
5.在CHOOSE菜单下选择AUTO STOPS作定位器快开快关校验。
6.完成后返回CALIBRATE MENU(校验菜单),选择第2项TUNING并进入TUNING CHOOSE 选项菜单。
7.在TUNING CHOOSE选项菜单下选择第2项AUTOTUNE自动校验PID。
8.完成后按以上步骤返回到最初菜单。
梅索尼兰MASONIELAN SV-II阀门定位器调校步骤
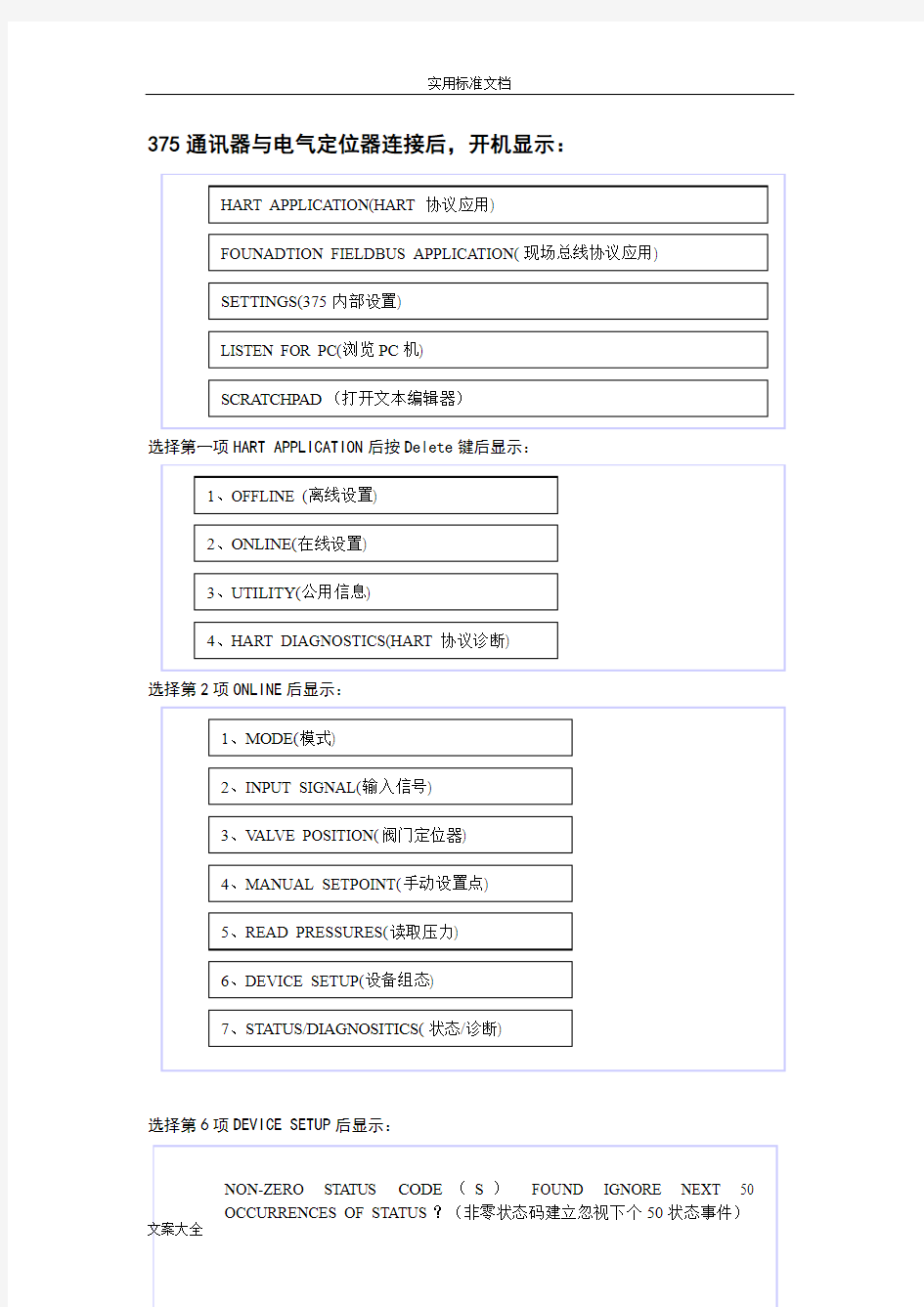
375通讯器与电气定位器连接后,开机显示:
选择第一项HART APPLICATION后按Delete键后显示:
选择第2项ONLINE后显示:
选择第6项DEVICE SETUP后显示:
按YES 键后显示:
选择第3项SETUP WIZARD 后显示:
按OK 键后显示:
选择第一项并按ENTER键后显示:
选择第二项并按ENTER键后显示:
按OK键后显示:
按OK键后显示:
自动检测完后显示:
按ENTER键后显示:
选择2、RUN auto tune后按ENTER键后显示:
按OK键后显示:
按ENTER键后显示:
按ENTER键后显示:
按ENTER键后显示:
进入自动校验步骤,过程大约需要8分钟,不要按ABORT键,否则取消校验。
按ENTER键后显示:
按ENTER键后显示:
选择1、NORMAL 后显示:
整个调校过程结束。
第一种方法: 1.在**DEVICE SETUP**(设备设置)菜单模式选择第3项**SETUP WIZARD**(设备向导)选项菜单并进入**AIR ACTION CONFIGURARTION**菜单。 2.在AIR ACTION CONFIGURARTION菜单选择第1项SKIP THIS TASK (跳过)进入FIND VALVE STOPS菜单。 3.在FIND VALVE STOPS菜单下选择第2项RUN AUTO STOPS作为定位器的全开全关校验,完成后进入AUTO TUNE菜单。 4.在AUTO TUNE菜单下选择第2项RUN AUTO TUNE做定位器PID参数校验,完成后进入RESET TO FACTORY DEFAULT 菜单。 5.在RESET TO FACTORY DEFAULT 菜单下选择第1项SKIP THIS TASK(跳过)返回初始菜单。 注意:SVI II AP定位器用HART375校验时,HART375必须经过升级后才能使用。 第二种方法: 1.将定位器安装到阀门,接上正常的电气信号,连接HART375与定位器,进入NORMAL MODE菜单模式。 2.在NORMAL MODE菜单下选择第4项MANUAL MODE MENU(手动模式菜单)并进入。 3.在MANUAL MODE MENU(手动模式菜单)下选择第3项CALIBRATE MENU(校验菜单),并进入。 4.在CALIBRATE MENU (校验菜单)下选择第1项RANGE并进入CHOOSE菜单。5.在CHOOSE菜单下选择AUTO STOPS作定位器快开快关校验。 6.完成后返回CALIBRATE MENU(校验菜单),选择第2项TUNING并进入TUNING CHOOSE选项菜单。 7.在TUNING CHOOSE选项菜单下选择第2项AUTOTUNE自动校验PID。 8.完成后按以上步骤返回到最初菜单。
智能阀门定位器中压电 阀工作原理 Company number:【0089WT-8898YT-W8CCB-BUUT-202108】
0引言 阀门定位器是气动调节阀的配套产品,长期以来国产的阀门定位器是使用模拟信号和力平衡原理方法实现的。近年来,由于电子技术的发展,国外多家公司推出了智能阀门定位器,因为其控制精度高、可靠性好、抗振性好、调试方便、流量特性可在线修改、可远程通讯等优越性能,深受用户的青睐。我公司经过多年攻关,研制出HVP型智能阀门定位器,该产品由CPU模板、阀门电流反馈模板、HART通讯模板、报警模板、显示模板、精密位置传感器和I/P 转换单元组成。 I/P转换单元是阀门定位器重要的关键部件之一,其可控性、抗振动性、耗电量、耗气量指标都将直接影响整机性能,设计出优良的I/P转换单元是实 现阀门定位器智能化的重要步骤之一。 1I/P转换单元的类型 I/P转换单元主要作用是把电信号变换成气动信号,通过放大喷嘴的背压和流量控制,使其具有足够的功率去操作气动调节阀。I/P转换单元的种类可按空气消耗量分为:耗气式和不耗气式两种结构。其中由于不耗气式I/P转换
单元的耗气量小,气源压力易于稳定,压力放大倍数小,改善振荡现象,因此,不耗气式的I/P转换单元常常用于阀门定位器设计中。 I/P转换单元按结构形式可分为:线圈喷嘴挡板式、线圈滑阀式和压电阀式三种结构。由于线圈喷嘴挡板式I/P转换单元的结构简单、制造方便、成本低,因此,传统阀门定位器中的I/P转换单元绝大多数采用这种结构方式。线圈滑阀式主要在电磁阀中采用,压电阀式的I/P转换单元,最早出现是在二十世纪90年代西门子公司推出的SIPARTPS智能阀门定位器中,因其具有高抗振动性、高可靠性、低功耗、低耗气量和能够接受较高频率的控制信号等特点,非常适合智能阀门定位器对I/P转换单元的性能要求。 2压电阀工作原理和技术指标 (1)工作原理 压电阀实际是利用功能陶瓷片在电压作用下产生弯曲变形原理制成的一种两位式(或比例式)控制阀。控制压电阀动作只需提供足够的电压,电功耗几乎为零。其动作原理:压电阀的初始状态(不通电,如图1所示),功能陶瓷片作用在喷嘴口1上,这时,口2与喷嘴口3与先导腔连通,形成为一个整体。当压电阀接通电源时(如图2所示),功能陶瓷片变形向上翘,把喷嘴口 3压住,使得口2与喷嘴口1连通。
电厂名称机组双阀座阀门 小尺寸高温高压阀门微小流量阀门中温中压通用阀门大尺寸高温高压阀门高温高压角阀锅炉给水 小流量 装置 三通 调节阀液位计浮筒 汕头Unit1 & 22×100MW 21000350004100078200深圳电厂1×100MW 21000350004100078200珠海电厂1×100MW 21000350004100078200江油电厂3×330MW 21000 35000 4100078200珞璜电厂2×330MW 41000 78200北仑港电厂3×600MW 21000 35000410007900080000 元宝山电厂1×600MW 10000 2100035000 4100070000 78200大亚湾核电站2×900MW 2100028000 35000 4100078200 秦山核电站2×900MW 2100041000 石景山电厂2×200MW 21000 35000 扬州电厂2×200MW 41000 平顶山电厂2×300MW 21000 4100070000汉川电厂 2×300MW 41000 内蒙达旗Unit 1 & 22×300MW 2100035000沙角电厂3×660MW 21000 35000 41000 荆门电厂湖北阳逻电厂2×300MW 210004100070000 北京第一热电厂21000北京第二热电厂21000 渭河电厂4×300MW 21000广安电厂 2×300MW 21000 35000 41000 MASONEILAN (梅索尼兰调节阀) 中国电厂用户清单
甘肃靖远电厂2×350MW2100041000 广东韶关电厂1×600MW210004100070000 山东石衡电厂4×300MW 嘉兴发电厂 哈尔滨第三电厂2×600MW 深圳月亮湾电厂50MW35000Level 克拉马依自备电厂50MW 上海石洞口电厂Unit 1&22×600MW 平圩电厂2×600MW 广东黄浦电厂21000 双辽电厂2×300MW2100041000 秦山电厂35000Level 辽宁电厂35000Level 珠江电厂4×300MW35000Level 沙岭子电厂300W2100035000Level 首阳山电厂Unit 1& 221000Level 七台河电厂2×300MW21000Level 平凉电厂2×300MW2100041000 铜陵电厂2100041000 乌石化自备电厂2×200MW level 浙江台州电厂2×330MW level 宝机电厂4×300MW210003500041000 沈阳热电厂三期扩建2×50MW2100041000 安徽芜湖电厂4×125MW78200 姚孟电厂1×300MW21000level 扬子石化自备电厂1×55MW210004100078200 蒙华海渤湾电厂2×200MW210004100079000
培训讲义 本次课课题:梅索尼兰定位器调试学时数:2学时 培训内容: SVI II型定位器和SVI II AP型定位器在维修和更换安装阀门后要重新进行“阀门行程校 验” Find Stop和Auto Tune校验,来确保阀门开度的精度。下面介绍用HART475校验的具体步骤: SVI II型定位器: 1.将定位器安装到阀门,接上正常的电气信号,连接 HART475与定位器,进入“ normal mode”(正常模式)菜单模式。 2. 在“ normal mode”(正常模式)菜单下选择第 4 项“ manual mode menu”(手动模式菜单)并进入 3. 在“ manual mode menu” ( 手动模式菜单 ) 下选择第 3 项“ calibrate menu” ( 校验菜单 ) ,并进入 4.在“ calibrate menu ” ( 校验菜单 ) 下选择第 1 项“ Range”(范围)并进入“ choose ”(选择)菜单 5.在“ choose ”(选择)菜单下选择“ Auto stops ”(自动停止 ) 作定位器快开快关校验 6.完成后返回“calibrate menu ”( 校验菜单 ) ,选择第 2 项“Tuning ”(调谐)并进入 “ Tuneing choose ”(调谐选择)选项菜单 7. 在“ Tuneing choose ”选项菜单下选择第 2 项“ autotune ”(自动调谐)自动校验PID 8.完成后按以上步骤返回到初始菜单。 SVI II AP型定位器有三种步骤: 第一种步骤: 1.将定位器安装到阀门,接上正常的电气信号,连接 HART475与定位器,建立通讯后,进入菜单第 6 项“ Device Setup ”(设备设置)菜单模式。 2. 在“ Device Setup ”(设备设置)菜单模式进入第 2 项“ change mode ”(更改模式),将模式改为第 3 项“ setup ”(设置) 3. 返回“ Device Setup ”(设备设置)菜单模式,进入第 4 项“ Manual Setup ”(手动设置)选项菜单 4. 在“ Manual Setup ”(手动设置)选项菜单下分别进入第 4 项“ Find Stops ”(找到停止)作快开快关校验,完成后返回“ Manual Setup ”(手动设置)选项菜单 5. 在“ Manual Setup ”(手动设置)选项菜单选择第 5 项“ Auto Tune ”(自动调谐)作定位器的 PID 参数校验 6.校验完毕后返回菜单“ change mode”(更改模式)将模式改为” Normal ”(正常)初始菜 单。 第二种步骤:
西门子阀门定位器操作手册 压电阀介绍: 1、引言 传统的气动阀中大量使用了电磁铁作为电-机械转换级,其把电控制信号转换为机械的位移,推动阀芯,实现气路的切换或气体压力、流量的比例控制。作为电-机械转换级的电磁铁有价格低廉,操作使用方便等优点;但其也有很多缺点:如功耗大、响应速度不够快、存在发热及有电磁干扰等。把压电材料的电-机械转换特性引入到气动阀中,作为气动阀的电-机械转换级,这是一项不同于传统气动阀的全新技术。采用了压电技术的气动阀在性能上有着传统气动阀无可比拟的优势。 2、压电效应简介 对于晶体构造中不存在对称中心的异极晶体,加在晶体上的张紧力、压应力或切应力,除了产生相应的变形外,还将在晶体中诱发出介电极化或电场。这一现象被称为正压电效应;反之,若在这种晶体上加上电场,从而使该晶体产生电极化,则晶体也将同时出现应变或应力,这就是逆压电效应。两者通称为压电效应。1880 年居里兄弟发现了电气石的压电效应,从此开始了压电学的历史。压电式气动换向阀即是利用压电逆效应而研制的。 3、压电技术在气动阀中的应用 1、微型直动式换向阀 利用压电材料在电场作用下的变形,来实现气动阀阀口的开启和关闭,这样就可以做成微型直动式换向阀。如下图所示的微型二位三通换向阀,1 口为进气口,2 口为输出气口,3、口为排气口,阀中间的弯曲部件为压电材料组成的压电片。当没有外加电场作用时,阀处于:图1 状态:进气口关闭,输出气口2 经排气口3 通大气。当在压电阀片上外加控制电场后,压电阀片产生变形上翘,上翘的压电阀片关闭了排气口3,同时进气口1 和输出气口2 连通。这样就完全实现了传统二位三通电磁换向阀的功能。 图1 图2 2、压电式电气比例调压阀 压电材料的变形量正比于施加在其上的电场强度,利用这一特点,可以开发出比例调压阀。如图3 所示,施加不同的控制电压到压电阀片上,压电阀片产生不同的弯曲变形量,这样就在进气口1 与输出气口2 之间及输出气口2 与排气口3 之间形成不同的气流阻力,从而在输出气口2 的得到不同的气体压力。由于压电阀片在变形过程中不受机械摩擦力,且压电阀片有响应快功耗低的特点,基于压电阀片的电气比例调压阀很多性能优于传统的比例调压阀。例如其没有死区,压力可以从零开始连续调节;其响应快,可满足高速系统的应用要求;其功耗低,对电源功率要求低。 图3
MASONEILAN调节阀技术特点简介 梅索尼兰100多年阀门研发、设计、生产和服务的历史保证其在蒸汽、气 体和液体流动调节设备领域的领先地位。其对世界调节阀领域的贡献包括: 跨越随后的50年直到20世纪末期,梅索尼兰以其革新性的领先控制阀技术与过程工业的发展并驾齐驱,这一阶段梅索尼兰最瞩目的革新及行业专利包括:1944,被广泛接受的阀门流量系数Cv. 1948,用于化工服务工况的多阀体阀门:Annin 1955,经久耐用、低成本的弹簧薄膜执行机构 1958,所产阀门应用于第一个核电厂(PeachBottom,PA) 1964,用于阿波罗航天项目地面安装的控制设备 1967,用于顶导向阀门的快速更换阀内件 1968,第一个旋转式阀门(偏心旋塞结构:Camflex) 1971,用于航天飞机项目氢工况的阀门 1975,带Lo-dB阀内件的低噪音阀门 1981,荣获Vaaler奖 1982,高压轴流向泄压阀LincolnLog 1984,可调节阀门流量系数Cv的阀门Varipak 1998,压缩流体能源管理阀门V-Log 2002,SteamForm减温减压器 MASONEILAN调节阀的主要特点: 1. 顶部导向阀杆设计确保阀门即使在恶劣的工况下也能达到最大的稳定性。所 有阀芯的阀杆导向部位,采用加强设计,有效防止阀门振动,利于阀门调节过程的稳定和精确。 2. 阀塞和阀座密封面全部采用精细加工配合实现线密封,关键阀芯密封采用堆 焊司太力硬质合金,阀塞表面渗氮硬化处理设计,保证阀门使用寿命长。 3. 高温阀,尤其蒸汽系统阀门,介质温度很高,为保护盘根密封采用延长阀盖 (Extension)阀盖设计,阀杆采用660系列高等级不锈钢。 4. 在阀门关键密封面大量采用硬质合金或表面硬化处理的不锈钢衬套设计,保 证阀门的使用寿命长。 5. 全部为快速更换阀芯,整个阀芯装配中没有任何的螺栓或焊接等方式的硬连 接。便于更换和检修。 6. 阀体具有通用性,可以互换。阀内件和阀体标准化设计,即不同的阀内件适 用于各个系列的阀体,且具有互换性,备件通用,方便用户检修 7. 阀内件等关键部位全部采用400或300系列的不锈钢。 8. MASONEILAN主要调节阀型式介绍: A、21000系列阀门结构
阀门定位器的工作原理与结构(很详细的介绍) -标准化文件发布号:(9556-EUATWK-MWUB-WUNN-INNUL-DDQTY-KII
阀门定位器的工作原理与结构 阀门定位器是气动调节阀的关键附件之一,其作用是把调节装置输出的电信号变成驱动调节阀动作的气信号。它具有阀门定位功能,既克服阀杆摩擦力,又可以克服因介质压力变化而引起的不平衡力,从而能够使阀门快速的跟随,并对应于调节器输出的控制信号,实现调节阀快速定位,提升其调节品质。随着智能仪表技术的发展,微电子技术广泛应用在传统仪表中,大大提高了仪表的功能与性能。 阀门定位器(图1) 阀门定位器的原理:反馈杆反馈阀门的开度位置发生变化,当输入信号产生的电磁力矩与定位器的反馈系统产生的力矩相等,定位器力平衡系统处于平衡状态,定位器处于稳定状态,此时输入信号与阀位成对应比例关系。当输入信号变化或介质流体作用力等发生变化时,力平衡系统的平衡状态被打破,磁电组件的作用力与因阀杆位置变化引起的反馈回路产生的作用力就处于不平衡状态,由于喷嘴和挡板作用,使定位器气源输出压力发生变化,执行机构气室压力的变化推动执行机构运动,使阀杆定位到新位置,重新与输入信号相对应,达到新的平衡状态。在使用中改变定位器的反馈杆的结构(如凸轮曲线),可以改变调节阀的正、反作用,流量特性等,实现对调节阀性能的提升。 智能阀门定位器结构如下图所示,其中虚线内为定位器部分,右侧为气动执行机构。控制和驱动电路,以及位置反馈传感器的数据采集电路,均位于定位器内的电路板中。控
制电路主要完成控制信号和位置反馈信号的数据采集与处理工作,同时形成稳定输出电压。驱动电路用于PWM电流滤波后的功率放大。喷嘴挡板、喷嘴以及相应组件构成了I/P 转换器,实现电气转换。调节喷嘴挡板和喷嘴的间距,通过气体放大器,完成对输出气体的调节。反馈杆和位置反馈传感器,完成气动执行机构位移的检测,并组成完整的闭环控制系统。 智能阀门定位器结构图(图2)
气动阀门定位器工作原理
气动阀门定位器是按力平衡原理设计工作的,其工作原理方框见上图所示,它是按力平衡原理设计和工作的。 如图上图所示当通入波纹管的信号压力增加时,使杠杆2绕支点转动,档板靠近喷嘴,喷嘴背压经放大器放大后,送入薄膜执行机构气室,使阀杆向下移动,并带动反馈杆(摆杆)绕支点转动,连接在同一轴上的反馈凸轮(偏心凸轮)也跟着作逆时针方向转动,通过滚轮使杠杆1绕支点转动,并将反馈弹簧拉伸、弹簧对杠杆2的拉力与信号压力作用在波纹管上的力达到力矩平衡时仪表达到平衡状态。此时,一定的信号压力就与一定的阀门位置相对应。 以上作用方式为正作用,若要改变作用方式,只要将凸轮翻转,A向变成B向等,即可。 所谓正作用定位器,就是信号压力增加,输出压力亦增加;所谓反作用定位器,就是信号压力增加,输出压力则减少。 一台正作用执行机构只要装上反作用定位器,就能实现反作用执行机构的动作;相反,一台反作用执行机构只要装上反作用定位器,就能实现正作用执行机构的动作。 ZPD-2000系列电气阀门定位器 ZPD-2000系列电气阀门定位器是根据国际先进的同类型产品,集多年成功的专业制造经验和先进的应用技术,经过消化吸收和针对(老产品)ZPD-2000 型系列电气阀门定位器加以综合改进的产品,并积极贯彻ISO9001质量保证体系,具有一定的先进性,符合国际标准要求的一种新型定位器。 一、产品的功能用途和适应范围: 1、产品的功能用途: ZPD-2000系列电气阀门定位器是各种气动执行器的主要配套仪表。它与气动调节阀配套使用,构成闭环控制回路。用以提高调节阀的控制精度。克服填料函与阀杆的磨擦力,克服介质压差对调节阀阀芯不平衡力。提高阀门动作速度,可实现分程控制
梅索尼兰SVI 2AP定位器调试方法简介 说明: 1.阀门定位器上有三个按钮(*、+、-),按任 意键进入,屏幕显示为~OPER,按+或-选择依次为 (这里+号)MAN、CONTROLLER、EXAMINE。 2.上述3显示至MAN时,按*键可至人工调整模式 (POS-MAN),按+或-选择(CAL{校准}、CONFIG {开始用这里进}、CONTROLLER、EXAMINE、OPER)。 3.CONFIG(配置)按*进入 1)SINGLE单作用、DOUBLE双作用; 2)CONTROLLER控制ON、OFF; 3)ATO气开{正常疏水}、ATC气关{危急疏水}; 4)LINEAR线性50%、30%、QUICK、CUSTOM…; 5)TIGHT SHUT强制关闭 ON/OFF; 6)LO POSITION LIMIT ON/OFF; 7)HI POSITION LIMIT ON/OFF; 8)ENGLISH/FRANCIAS; 9)MAN以上选择1-9用+或-修改用*到9后返回人 工模式。一般1根据实际决定;2选择OFF;3根据 实际决定;4可不选择;5选择OFF如果选择ON在 末端位置时容易偏差较大,等于完全把气放空,而 不在控制之内;6选择ON;7选择ON;8选择ENGL ISH。 4. CAL按*进入再用+或-, 1)STOPS按*自动检测阀门全开和全关位置。 2)STOP OP按*进入,阀门自动运行至全开位置, 此时可用+或-调整。 3)BOAS。 4)TONE{调整}按*进入自动检测阀门动态参数。 5)SIG LO设定多少信号显示0%。 6)SIG HI设定多少信号显示100%。就地不修改, DCS改。 7)HI PRESSURE VALUE。 8)MAN返回人工模式。, G" n7 k7 G+ U 返回人工模式POS MAN选择至OPER按*退出
阀门定位器的工作原理与结构 阀门定位器是气动调节阀的关键附件之一,其作用是把调节装置输出的电信号变成驱动调节阀动作的气信号。它具有阀门定位功能,既克服阀杆摩擦力,又可以克服因介质压力变化而引起的不平衡力,从而能够使阀门快速的跟随,并对应于调节器输出的控制信号,实现调节阀快速定位,提升其调节品质。随着智能仪表技术的发展,微电子技术广泛应用在传统仪表中,大大提高了仪表的功能与性能。 阀门定位器(图1) 阀门定位器的原理:反馈杆反馈阀门的开度位置发生变化,当输入信号产生的电磁力矩与定位器的反馈系统产生的力矩相等,定位器力平衡系统处于平衡状态,定位器处于稳定状态,此时输入信号与阀位成对应比例关系。当输入信号变化或介质流体作用力等发生变化时,力平衡系统的平衡状态被打破,磁电组件的作用力与因阀杆位置变化引起的反馈回路产生的作用力就处于不平衡状态,由于喷嘴和挡板作用,使定位器气源输出压力发生变化,执行机构气室压力的变化推动执行机构运动,使阀杆定位到新位置,重新与输入信号相对应,达到新的平衡状态。在使用中改变定位器的反馈杆的结构(如凸轮曲线),可以改变调节阀的正、反作用,流量特性等,实现对调节阀性能的提升。 智能阀门定位器结构如下图所示,其中虚线内为定位器部分,右侧为气动执行机构。控制和驱动电路,以及位置反馈传感器的数据采集电路,均位于定位器内的电路板中。控制
电路主要完成控制信号和位置反馈信号的数据采集与处理工作,同时形成稳定输出电压。驱动电路用于PWM电流滤波后的功率放大。喷嘴挡板、喷嘴以及相应组件构成了I/P转换器,实现电气转换。调节喷嘴挡板和喷嘴的间距,通过气体放大器,完成对输出气体的调节。反馈杆和位置反馈传感器,完成气动执行机构位移的检测,并组成完整的闭环控制系统。 智能阀门定位器结构图(图2)
几种阀门定位器工作原理介绍: 气动阀门定位器(一) 气动阀门定位器是按力平衡原理设计工作的,其工作原理方框见上图所示,它是按力平衡原理设计和工作的。如图所示当通入波纹管的信号压力增加时,使杠杆2绕支点转动,档板靠近喷嘴,喷嘴背压经放大器放大后,送入薄膜执行机构气室,使阀杆向下移动,并带动反馈杆(摆杆)绕支点转动,连接在同一轴上的反馈凸轮(偏心凸轮)也跟着作逆时针方向转动,通过滚轮使杠杆1绕支点转动,并将反馈弹簧拉伸、弹簧对杠杆2的拉力与信号压力作用在波纹管上的力达到力矩平衡时仪表达到平衡状态。此时,一定的信号压力就与
一定的阀门位置相对应。以上作用方式为正作用,若要改变作用方式,只要将凸轮翻转,A向变成B向等,即可。所谓正作用定位器,就是信号压力增加,输出压力亦增加;所谓反作用定位器,就是信号压力增加,输出压力则减少。一台正作用执行机构只要装上反作用定位器,就能实现反作用执行机构的动作;相反,一台反作用执行机构只要装上反作用定位器,就能实现正作用执行机构的动作。 气动阀门定位器(二) 气动阀门定位器是一种将电气信号转换成压力信号的转换装置,以压缩空气或氮气为工作气源来控制工业炉调节阀的开度大小。普遍用于工业炉温度自动控制系统中对气动阀门执行机构的连续控制。 气动阀门定位器是按力平衡原理工作的,实现由输入的4~20mA电流信号控制气动阀门由0~100%的开启度。其工作原理如下图。
当需要增加阀门开启度,计算机控制系统的输出电流信号就会上升,力矩马达①产生电磁场,挡板②受电磁场力远离喷嘴③。喷嘴③和挡板②间距变大,排出放大器④内部的线轴⑤上方气压。受其影响线轴⑤向右边移动,推动挡住底座⑦的阀芯⑨,气压通过底座⑦输入到执行机构⑩。随着执行机构气室⑩内部压力增加,执行机构推杆⑥下降,通过反馈杆⑩把执行机构推杆@的位移变化传达到滑板⑩。这个位移变化又传达到量程④反馈杆,拉动量程弹簧16。当量程弹簧16和力矩马达①的力保持平衡时,挡板②回到原位,减小与喷嘴③间距。随着通过喷嘴③排出空气量的减小,线轴⑤上方气压增加。线轴⑤回到原位,阀芯⑧重新堵住底座⑦,停止气压输入到执行机构⑩。当执行机构⑩的运动停止时,定位器保持稳定状态。 电气阀门定位器工作原理 1.杠杆 2.活塞膜片 3.反馈弹簧 4.杠杆 5.凸轮 6.反馈轴 7.联结 8.传动轴 9.执行机构 10.先导阀滑阀芯 11.先导阀体 12.零点和范围联动机构 13.内部反馈弹簧 14.转换块
阀门定位器原理与调节第一章气动阀门定位器 气动阀门定位器的原理图如下:(气关阀正作用) 气动阀门定位器实物图如下:
气动阀门定位器是按力平衡原理设计工作的,其工作原理方框见上图所示,它是按力平衡原理设计和工作的。 如图上图所示当通入波纹管的信号压力增加时,使杠杆2绕支点转动,档板靠近喷嘴,喷嘴背压经放大器放大后,送入薄膜执行机构气室,使阀杆向下移动,并带动反馈杆(摆杆)绕支点转动,连接在同一轴上的反馈凸轮(偏心凸轮)也跟着作逆时针方向转动,通过滚轮使杠杆1绕支点转动,并将反馈弹簧拉伸、弹簧对杠杆2的拉力与信号压力作用在波纹管上的力达到力矩平衡时仪表达到平衡状态。此时,一定的信号压力就与一定的阀门位置相对应。 以上作用方式为正作用,若要改变作用方式,只要将凸轮翻转,A向变成B向等,即可。 所谓正作用定位器,就是信号压力增加,输出压力亦增加;所谓反作用定位器,就是信号压力增加,输出压力则减少。要改变正反作用,Fisher的阀只需要把里面的调节盘拨到另一侧即可。 一台正作用执行机构只要装上反作用定位器,就能实现反作用执行机构的动作;相反,一台反作用执行机构只要装上反作用定位器,就能实现正作用执行机构的动作。 至于气开阀,由于是在膜盒下面通气,需要将如图中的凸轮反转。
第二章电气阀门定位器 由于现在DCS在现场使用越来越多,很多控制器都是使用了中控系统的控制器,所以中控到现场的都是4-20mA的电信号,到现场又需要阀动作的比较快。 虽然阀门定位器由最初的气/气阀门定位器、电/气阀门定位器发展到现在的数字阀门定位 器、区域总线阀门定位器,但它们的基本原理和主要功能都没有大的改变。 定位器中基本自控元件介绍--电/气转换器原理 随着仪表技术的发展,气动仪表领域已逐步被电动仪表和计算机控制所占领,现在只有在一些特 殊的场合还在使用气动仪表,作为仪表中的阀门附件“定位器”也由原来的气动阀门(P/P)定
MASONEILAN 调节阀在电厂的部分使用业绩 电厂名称 机组 小尺寸高温高压阀门 中温中压通用阀门 大尺寸高温高压阀门 高温高压角阀 锅炉给水 小流量装置 液位计浮筒 江油电厂 3×330MW 21000 35000 41000 78200 珞璜电厂 2×330MW 41000 78200 石景山电厂 2×200MW 21000 35000 扬州电厂 2×200MW 41000 平顶山电厂 2×300MW 21000 41000 70000 汉川电厂 2×300MW 41000 内蒙达旗Unit 1 & 2 2×300MW 21000 35000 湖北阳逻电厂 2×300MW 21000 41000 70000 北京第一热电厂 21000 北京第二热电厂 21000 渭河电厂 4×300MW 21000 广安电厂(一期锅炉) 2×300MW 21000 35000 41000 甘肃靖远电厂 2×350MW 21000 41000 山东石衡电厂 4×300MW 广东黄浦电厂 21000 双辽电厂 2×300MW 21000 41000 MASONEILAN 最小流量装置在中国的部分使用业绩 电厂名称 机组容量 锅炉给水最小流 量装置 采购方 供货时间 江油电厂 3×330MW 78200 珞璜电厂 2×330MW 78200 北仑港电厂 3×600MW 78200 元宝山电厂 1×600MW 78200 大亚湾核电站 2×900MW 78200 宝鸡电厂 2×600MW 18400/78400 2002年1月 平地泉电厂 4×300MW 18400/78400 2006年9月 古城电厂 2×300MW 18400/78400 2006年4月 阳宗海电厂三期 2×300MW 18400/78400 2007年4月 华电芜湖电厂三期 2×660MW 18400/78400 2007年4月 莱芜电厂 2×300MW 18400/78400 2007年8月 大同电厂三期 2×600MW 18400/78400 预计2008年3 月
阀门调试 梅索尼兰是一种智能式的定位器,对该种气动阀的调试,首先对控制回路查线和接线方式确认,再次对仪表管道进行吹扫。 注意事项:在进行设置时必须从信号源输入4~20mA电流信号或者从HART(数字通信协议)输入,操作电源来自于4~20mA电流信号或者是12/24VDC电压等多支路供应。当SVI阀门调节器或控制器没有按钮或者没有显示,如果要进行系统设置或校验,则必须用HART通信协议或者个人计算机上阀门软件来进行阀门参数设定。 该定位器又分为气开式(正作用式:4mA指令对应全关、20mA指令对应全开)、气关式(反作用式:4mA指令对应全开、20mA指令对应全关)和双气缸(厂家说:出厂是什么参数就是什么不需要更改什么参数)三种型号, 梅索尼兰有一个简便操作接口、高精度的阀位执行机构、据有自动设置和调整功能。所以我们首先要认识阀门的用户接口(interface),梅索尼兰有三个操作按钮,○1左边一个按钮上标有“*”字样,这个按钮允许我们进行选择或者确认被改的参数;○2中间这个按钮上标有“-”字样,这个按键允许我们从下一个菜单移到上一个菜单,或者对所修改的参数进行减操作;○3右边这个按钮上标有“+”字样,这个按键允许我们从上一个菜单移到下一个菜单,或者对所修改的参数进行加操作。 当我们首次调试时,第一个看到的画面是“POS…”,如果要调整该定位器,首先必须从“POS…”切换到手动位置,画面显示的是:“MAN POS”。当阀门在自动位置时我们可以用以下方法进行切换。首先按标记为“+”的键,只到阀门显示(→MAN)字样时,按“*”键就可以进入手动状态,在手动状态时阀门应显示(MAN POS)字样。这时如果再按下“*”键,就可以进行手动操作该阀门。如果想切换到自动位置时,只要该定位器显示(MAN POS)字样时,表示阀门现为手动状态。这时我们只有按下“+”键,只到显示(→OPER)字样,这时按“*”键,阀门将会自动进入自动状态。 我们不论对任何一种气动阀门进行调试,都要首先知道他工作所需要的最大工作气压和工作特性。于梅索尼兰(Masoneilan SVIⅡ)定位器来说也不例外,调试时一定要先进行参数和工作气压设定,在调节阀门的工作气压时,不要使工作气压力超过铭牌上所规定的工作气压。第一、要选择阀门是单气缸进气(SINGLE)还是双气缸进气(DOUBLE);第二、要选择该阀门是气开式(ATO)还是气关式(ATC)。第三、定位器语言选项,这个选项有两个参数值可选其一,一个是英语而另一个就是法语。而定位器的默认的参数值是英语。而只有该阀门的仪用空气压力为零时,才能拆卸阀门。 首让该定位器处于手动状态,再次找到“CAL”菜单下的“TUNE”子菜单,最后按下“*”键,该定位器就会自动进行校验,当定位器显示“finish”时,那么就表示该该定位器的自动校验过程结束。
2.2电-气阀门定位器的作用是把调节装置输出的电信号变成驱动调节阀动作的气信号,而且具有阀门定位功能,即克服阀杆摩控力,抵消被调价质压力变化而引起的不平衡力,从而使阀门开度对应于调节装置输出的控制信号,实现正确定位。由于本定位器具有防爆结构,故能使用于爆炸危险场所。 智能电气阀门定位器工作原理 虽然智能电气阀门定位器与传统定位器从控制规律上基本相同,都是将输入信号与位置反馈进行比较后对输出压力信号进行调节。但在执行元件上智能定位器和传统定位器完全不同,也就是工作方式上二者完全不同。智能定位器以微处理器为核心,利用了新型的压电阀代替传统定位器中的喷嘴、挡板调压系统来实现对输出压力的调节。目前有很多厂家生产智能型电气阀门定位器,西门子公司的SIPATT PS2系列智能电气阀门定位器比较典型,具有一定代表性,下面以就以SIPART PS2系列定位器为例,对智能定位器的工作原理进行说明,其基本结构如图2所示: 其具体工作原理如下: 由阀杆位置传感器拾取阀门的实际开度信号,通过A/D转换变为数字编码信号,与定位器的输入(设定)信号的数字编码在CPU中进行对比,计算二者偏差值。如偏差值超出定位精度,则CPU输出指令使相应的开/关压电阀动作,即:当设定信号大于阀位反馈时,升压压电阀V一l打开,输出气源压力P1增大,执行机构气室压力增加是阀门开度增加,减小二者偏差;如设定信号小于阀位反馈则排气压电阀V-2打开,通过消音器排气减小输出气源压力P1,执行机构气室压力减小是阀门开度减小,二者偏差减小。正是通过CPU 控制压电阀来调节输出气源压力的大小使输入信号与阀位达到新的平衡。
2.3 智能电气阀门定位器对输出气源压力调节的新颖之处 1) 输出压力调节采用PID脉宽调制(PWM)技术,迅速准确。由于CPU对压电阀的控制采用一个五步开关程序来控制,可以精确、快速地控制输出气源压力增减。其控制算法一般采用数字PID调节方式,CPU根据输入信号与阀位产生偏差的大小和方向进行PID计算,输出一个PWM脉宽调制脉冲信号来控制压电阀开、闭动作。由于脉冲的宽度对应于定位器输出气源压力的增量,从而可以迅速、准确的改变气源压力输出P1。当偏差较大时,定位器输出一个连续信号,快速连续、大幅度的改变P1的大小,当偏差较小时,定位器输出一个较小脉宽的脉冲信号,断续、小幅改变P1的大小,当偏差很小(进入死区)时,则无脉冲输出,阀位稳定工作。 2) 新型压电阀器件的采用,保证了控制的高精度。压电阀的主导元件是一个压电柔韧开关阀,也称作硅微控制阀,由于其质量小,开关惯性非常小,可以执行很高的开关频率,因而作为一个高频率的脉冲阀,对输出气路压力P1进行控制,驱动执行机构,可以达到很高的阀门定位精度。 3) 阀位反馈元件定位精度高,寿命长。阀位反馈元件是一个结构简单、高精度、高可靠性的导电塑料电位器,将执行机构的直线或转角位移转换为电阻信号,因而可以精确的检测阀位并且可以方便的对阀门进行零位,满度及阀门流量特性曲线的定位。 2.4 智能定位器的特点由于新型控制元件如导电塑料和压电阀的使用,可以使阀门定位达到很高精度,由于微处理的使用,可以使定位器的调校以及适用范围有大的改善。主要特点是: 1) 安装简易;可以进行自动调校。组态简便、灵活,可以非常方便的设定阀门正反作用,流量特性,行程限定或分程操作等功能。 2) 定位器的耗气量极小。传统定位器的喷嘴、挡板系统是连续耗气型元件。由于智能定位器采用脉冲压电阀替代了传统定位器的喷嘴、挡板系统,而且五步脉冲压电阀控制方式可实现阀门的快速、精确定位。智能定位器只有在减小输出压力时,才向外排气,因此在大部分时间内处于非耗气状态,其总耗气量为 20L/h,相对于传统定位器来说可以忽略不计。 3) 具有智能通讯和现场显示功能,便于维修人员对定位器工作情况进行检查维修。 4) 定位器与阀门可以采用分离式安装方式。因为智能定位器的位置反馈元件是电位器,即阀位信息是用电信号传递的,并且可以在CPU中对阀门的特征进行现场整定。因此采用行程位置检测装置外置的方法,将阀位反馈组件与定位器本身分离安装。将行程位置检测装置在执行机构上,定位器安装在离执行器一定距离的地方,如图3所示:
梅索尼兰21000系列调节阀设计特点 21000 系列不平衡内件的单座重荷型顶部导向控制阀的通用性设计,使其很好地适应各种控制应用。标准特性包括: 1、顶部导向 稳固的重荷型顶部阀芯导向为阀芯稳定性提供了出色的动态支持。 单级或双级 2、Lo-dB?/抗气蚀内件 可以 Lo-dB? 内件/抗气蚀设计代替传统的阀芯,提供了出色的噪音衰减或气蚀控制。 3、低容量和小流量内件 全系列阀门尺寸中缩小阀内件可提供很宽的流量范围。也可提供满足小流量要求的可选内件。 4、高压特性 可提供各种执行机构处理高压降需求。技术规范泄漏等级中允许的压力降数值可参照梅索尼兰文档 PH1080,也可通过梅索尼兰Valspeq? 计算与选型程序计算。 5、紧密关断能力 IV 级关断是标准等级。可选结构满足 IEC 534-60534-4 标准和ANSI/FCI 70.2 V 与 VI 级的要求。 6、加硬的内件 可用于处理高压降应用的标准的加硬的内件。选用合金钢阀体,阀门内件经过表面硬化阀座、阀杆、阀芯均选用不锈钢316材质。 7、内件类型
标准结构可提供快速替换或带有螺纹的阀座结构。该内件为不平衡内件,无需使用密封环或先导阀芯。 8、环境填料 可选用低泄漏LE? 填料确保了遵守最新的环境法规要求。 9、零泄漏 波纹管密封选件可满足零泄漏的的要求。 10、符合 NACE 标准 21000 系列可适用于酸性介质应用,其设计与加工方法均符合NACE 标准 MR 0103 的要求。须遵守 MR0175、2003 修订版或ISO15156 标准的应用必须进行工程评审。 11、稳定性 21000系列通过内件设计、执行器稳定性及闭合能力的整合达到最适宜的控制性能。强大的顶部导向阀杆确保阀门即使在最恶劣的工况下也能达到最大的稳定性。
智能阀门定位器及其工作原理 中国泵业网一:智能阀门定位器及其工作原理 (一)阀门定位器的定义和特点 阀门定位器是一种用于调节阀上的主要附件。通常来说又称为气动阀门定位器。一般来说必需与气动调节阀配套使用,才能正常运作。它的工作原理是接受调节器所输出的信号,然后利用这一信号去控制气动调节阀。当调节阀根据信号的指示做出一定的动作后,调节阀上的阀杆位置有一定的位移,这一位移的动作也会通过机器的机械装置反馈到阀门的定位器,这时阀门的状况通过这一个回合的电信号传给上位系统。阀杆位置移动的信号传输至它,然后经由它的反馈,它将这种信号作为反馈信号。控制器同样会输出一种信号,这种是一种输出信号。这两种信号作为比较。假如这两种信号泛起了某种偏差,使其足以改变机械操纵的执步履作,输出了执步履作的输出信号,会建立一种阀杆位置移动与控制器输出信号之间的对应关系。这时,阀门定位器能够组成一组以阀杆位置移动为丈量信号,以控制输出为设定信号的反馈控制系统。一般来说,阀门的定位器结构按照其结构形式和工作原理可以分气动阀门定位器、电气阀门定位器和智能式阀门定位器。阀门定位器的作用是增大调节阀的输出功率,对于调节信号快速传递很反映。对于阀杆来说,可以增加阀杆的移动速度,阀杆移动是所产生的摩擦力带来的平衡性题目有很大改善。阀门的线性度可以通过定位器装置的反应有很大的进步。对于阀门的准确定位和机器的
有效运行有巨大作用。 (二)智能阀门定位器的定义和工作原理 智能阀门调节定位器是一种不需要人工矫正和调整的,可以自动检测所带的调节阀零点、满度、摩擦系数、自动设置控制参数的阀门定位器。它的工作原理又和传统的阀门定位器工作原理有所区别。一般来说,后者接受的是来至控制系统的4~20mA模拟信号,然后通过驱动力,使电念头产生一定的电磁力,这种电磁力会作用于主杠杆。阀门器上阀位的变化一般来说主要经由反馈杆、凸轮、副杠杆和反馈弹簧传递到要做出反应的主杠杆上。主杠杆上的平衡直接影响挡板喷嘴机构,这一机构受它的影响,经由气动放大器来控制气动执行机构的进气与排气这逐一进一出的气体反应。然后才终极达到已经设定的参数,及设定点。简朴的来说,后者的主要工作原理主要是利用物理上的力平衡理论,来达到对于阀门的操控。 对前者,即智能阀门调节定位器来说。它的工作原理显然与科学技术的发展和市场需求相关。它的工作原理主要是通过电子化、数字化的信号控制。这也是人工智能做显著用于产业出产的特点。它接受的是来自于控制系统的4~20mA阀位设定信号,然后通过软件装置和计算机系统进行高精确度的A/D采样转换,得到一个设定值的变量数字元素。阀门位置的变化在经由了阀门位置所设置的反馈机构的阀门位置的电信号后,也需要经由A/D采样转换,计算出设定值的变量数字元素和阀门位置移动所产生的变量数值。这两个数值经由微处理器的处理,最后汇集成一个关于阀门位置变动的信号。通过电子
阀门定位器的工作原理和使用 在化工厂车间溜达一圈定会看到有些管道上装有圆圆脑袋的阀门,这就是调节阀。 气动薄膜调节阀 调节阀从它的名称则可知晓一些信息,关键词调节二字它的调节范围0~100%之间任意调节。 细心的朋友应该发现,每台调节阀的脑袋下面都挂着一个装置,熟悉的肯定知道,这就是调节阀的心脏,阀门定位器,通过这个装置可调节进入脑袋(气动薄膜)内气量,可以精准的控制阀门的位置。 阀门定位器有智能式定位器和机械式定位器,今天讨论的是后者机械式定位器,与图片所示的定位器一样的。 机械式气动阀门定位器的工作原理
阀门定位器结构示意图 图中基本将机械式气动阀门定位器的部件一一说清楚,接下来就是看它如何工作的? 气源来自于空压站的压缩空气,在阀门定位器气源进口前段还有一个空气过滤减压阀,用于压缩空气的净化。从减压阀出口的气源从阀门定位器进入,至于多少气量进入阀门的膜头,根据控制器的输出信号决定。 控制器输出的电信号是4~20mA,气动信号是20Kpa~100Kpa,从电信号到气信号是通过电气转换器进行的。
当控制器输出的电信号转变为与之相对应的气信号时,然后将转换后的气信号作用在波纹管上。杠杆2则绕着支点运动,杠杆2下段向右运动靠近喷嘴。喷嘴的背压增加,经过气动放大器放大后(图中那个带小于符号的部件),将气源的一部分送入到气动薄膜的气室,阀杆带着阀芯向下自动逐渐将阀门开度变小。此时,与阀杆相连的反馈杆(图中摆杆)绕着支点向下移动,使轴的前端向下移动,与其连接的偏心凸轮做逆时针旋转,滚轮顺时针旋转向左移动,从而拉伸反馈弹簧。由于反馈弹簧拉伸杠杆2下段向左移动,此时就会与作用在波纹管上的信号压力达到力平衡,于是阀门就固定在某个位置不动作了。 通过上面的介绍,应该对机械式阀门定位器有一定的了解,有机会的时候再操作一边最好是能够动手拆卸一次,加深定位器每个零件的位置及每个零件的名。因此,机械式阀门的浅谈告一段落,接下来进行知识的扩展,让对调节阀有个更深层次的认知。 知识扩展一 图中的气动薄膜调节阀属于气关式,有人就问,为什么? 第一,看气动薄膜的进气方向,是正作用。 第二,看阀芯安装方向,正作用。 气动薄膜气室通气源,膜片向下压膜片覆盖的六根弹簧弹簧,从而推动阀杆向下移动,阀杆与阀芯相连一起,阀芯正向安装,于是在得气源是阀门往关位置移动。因此,将其称之为气关阀。故障开的意思,当气源由于施