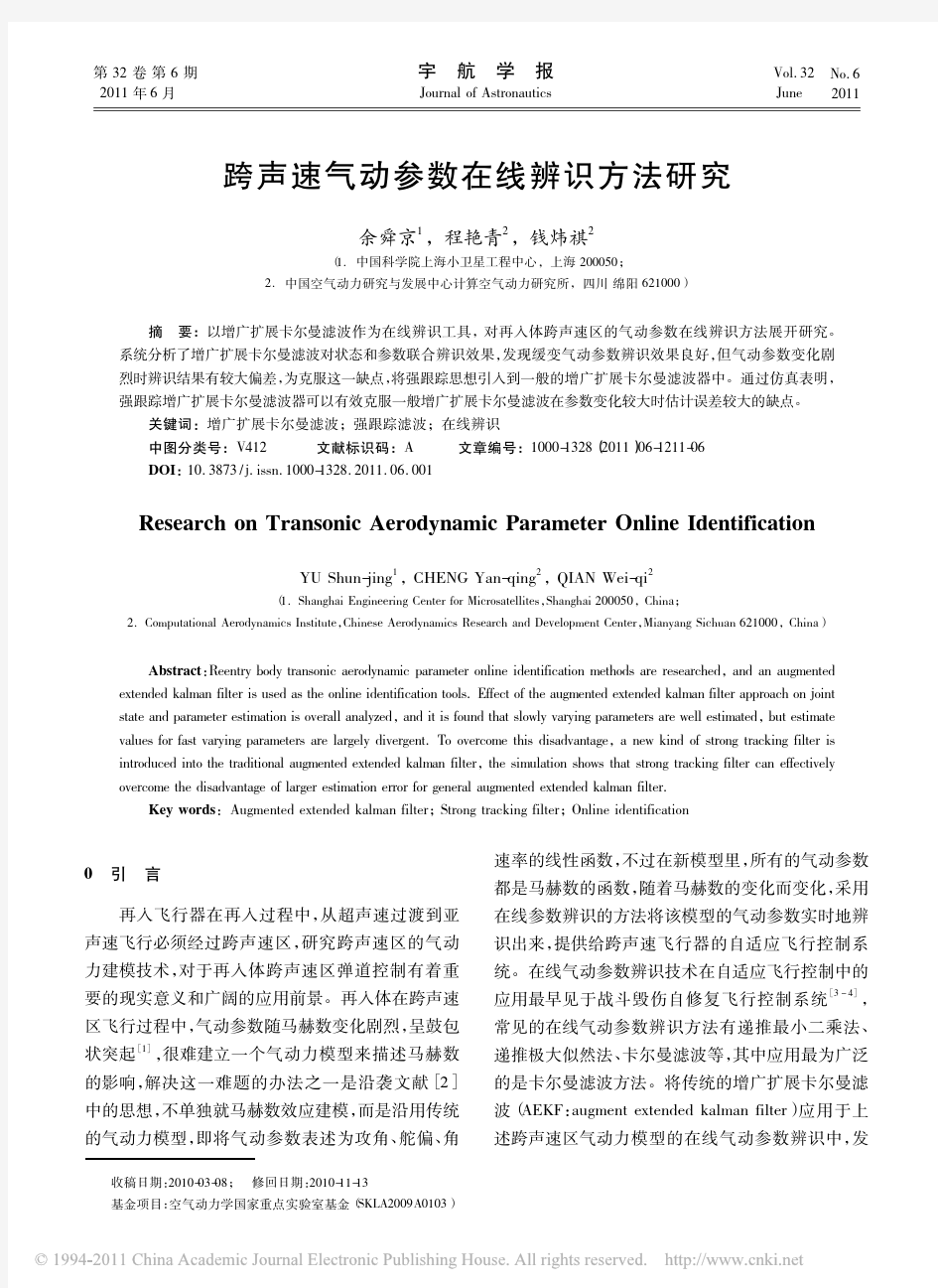
飞机气动力参数辨识技术的工程应用 在介绍飞机气动参数辨识原理的基础上,论述了该技术在飞机气动设计、飞行品质鉴定、飞行模拟机的飞行动力学模型开发等方面的应用情况,提出了涉及飞机试飞、模型开发等技术应用场景中的相关注意事项。 标签:飞机;气动参数辨识;试飞;仿真 引言 目前,常用的飞机气动建模技术手段有三种[1]:流体力学、风洞试验和飞行试验。基于飞行试验数据的飞机气动力参数辨识技术作为最重要的手段之一,受到了越来越多的重视,并被广泛地应用于校正飞机气动参数的流体力学计算和风洞试验结果、飞行品质评价、飞行模拟机建模仿真等方面。本文结合飞机/飞行模工程研制工作,详细介绍该技术的具体应用现状,并提出相关注意事项。 1 气动参数辨识原理 飞机气动力参数辨识作为飞机动力学系统辨识中发展最为成熟的一个分支,是系统辨识理论在飞行动力学系统方面的具体应用。该辨识通过测量飞机的发动机推力(测算)、舵面偏转和飞行状态数据,以飞机气动模型和飞机飞行动力方程作为状态方程,以上述测量得到的数据作为状态量和观测量,以此建立作用于飞机的空气动力(矩)与飞机运动状态参数和控制输入之间的解析关系式[2]。在图1所示的辨识基本原理 中,激励信号、辨识模型、参数估计和结果验证是辨识结果可信度的四大影响因素。 图1 飞机气动力参数辨识的基本原理 激励信号设计是通过舵偏操纵信号的优化设计,充分激励飞机的运动特性,确保飞机的运动模态信息尽可能多地包含在飞机试飞数据中[3]。辨识模型建立是基于空气动力学的先验知识初步确定模型的结构,将模型辨识问题转化为参数估计问题。辨识方法应用是选取合适的参数寻优准则和算法,通过飞机真实响应与模型仿真响应之间的差异进行模型参数的优化。辨识结果验证是确保建立的数学模型能够合理、精确地表征飞机的飞行动力学特性。 2 在飞机气动设计中的应用 在飞机的工程研制中建立准确的飞机气动模型,是飞行控制律参数调整、工程模拟机仿真等工作的前提和基础。而在飞机的初步/详细设计阶段,飞机气动模型的建立通常通过流体力学计算和风洞试验两种技术手段实现,但其模型的精度往往与真实飞机存在明显的差异。因此,飞机制造商多在飞机的研发试飞中开
闭环气动参数辨识的两步方法 王贵东,崔尔杰,刘子强 (中国航天空气动力技术研究院气动理论与应用研究所,北京100074) 摘 要:对于闭环控制飞行器动力学系统,如果输入输出数据中含有误差和噪声,将其直接用于辨识气动参数是有偏差的。针对这个问题,利用闭环控制飞行仿真数据,采用两步方法辨识飞行器的气动参数,并与直接开环辨识的结果及参数真值进行对比,表明两步方法辨识结果较直接开环辨识方法具有更高的精度,是一种有效的闭环气动参数辨识方法。 关 键 词:闭环系统;气动参数辨识;极大似然估计 中图分类号:V 412 文献标识码:A 文章编号:1002 0853(2010)02 0016 04 引言 收稿日期:2009 07 17;修订日期:2009 11 16 作者简介:王贵东(1976 ),男,河南鹿邑人,高级工程师,主要从事飞行力学和飞行器系统辨识研究; 崔尔杰(1935 ),男,河北高阳人,中科院院士,主要从事飞行器动态气动力与气动弹性研究。 飞行器气动参数辨识研究可以追溯到1919年W arner 和N orton 所进行的先导性工作,至今已有近九十年的历史。随着计算机技术和现代控制理论的 发展,不同国家在频域和时域辨识方面都开展了深入的研究,使得飞行器气动参数辨识技术得到了迅速发展,并成功地应用于飞机、导弹和返回舱等飞行器[1] 。出于飞行安全的考虑,大多数飞行器的飞行试验都是在闭环控制条件下进行的。飞行器闭环控制飞行时,由于控制系统的增稳作用,使得输入输出数据中有关系统动态特性的信息量减少,进而影响到系统参数的可辨识性。同时,如果输入输出数据中存在误差和噪声,将其直接用于辨识气动参数会使结果产生偏差。特别是一些量值较小的气动参数会被噪声淹没,使得这些参数不可辨识或辨识的误差很大。为了提高辨识结果的准确度,有必要研究飞行器在闭环控制条件下的气动参数辨识方法。目前,对于闭环控制飞行器飞行试验,一般采用开环处理的方法,即直接利用控制输出的测量数据和飞行状态的测量数据进行辨识。但理论已经证明,闭环系统的开环辨识是有偏估计,只是当噪声水平较小时,上述偏差是可以接受的。两步辨识方法是一种间接辨识方法,是指当飞行器的控制规律已知,且具有线性时不变的特性时,可以先辨识得到控制律参数和常值测量误差,并估计控制输出。进而利用控制输出的估计结果和飞行状态测量数据辨识前向通道的动力学参数[2 4] 。本文利用闭环控制飞行仿真数据,采用两步方法辨识飞行器的控制参数和气动参数,并与直接开环辨识结果及参数真值进 行比较,验证了两步方法是一种有效的闭环控制飞行器气动参数辨识方法。 1 参数辨识的极大似然算法 飞行器飞行动力学系统参数辨识问题的一般性描述为: x (t)=F [x (t),u (t), ,t]+ (t)x (0)=x 0 y (t)=H [x (t),u (t), ,t] z i =y i +G v i (i =1,2, ,N ) (1) 式中,x (t)为n 维状态向量;y (t)为m 维输出向量;z (t)为m 维观测向量;u (t)为l 维输入向量; 为p 维参数向量; 为n !q 过程噪声分布矩阵; (t)为q 维随机噪声向量;F 和H 为已知的实值函数。 取似然函数为: J = ? N i=1 {v T i B -1 i v i +ln |B i |} (2) 式中,v i 和B i 分别为t i 时刻的新息和新息协方差矩阵,其表达式为: v i =z i -y i ,B i =E {v i v T i } (3) 参数估计的极大似然方法就是求取参数 ^ ,使似然函数J 达到极小值[5] 。这是一个泛函极值问题,无法得到解析解,也无法直接数值积分,只能采用迭代求解算法。泛函极值的迭代求解法有多种,实践表明,N e w ton Raphson 寻优方法对于动力学系统辨识是最有效的。优化过程为: 设未知参数 第k 步的预估值 k ,由式(2)算出判据J k ,若J k 不是极小值,需调整 k ,即 k +1= k +! k ,使J k +1达到极小值,其必要条件为: 第28卷 第2期 飞 行 力 学 V o.l 28 N o .22010年4月 FL I GHT DYNAM ICS Apr .2010
%ITD法识别模态参数 clear clc close all hidden format long %% txt文件下输入 fni=input('ITD法模态参数识别-输入数据文件名:','s'); fid=fopen(fni,'r'); mn=fscanf(fid,'%d',1); %模态阶数 %定义输入实测数据类型 %ig=1时域数据如冲击响应、自由振动、互相关函数、随机减量法处理结果 %ig=2频域数据如频响函数实部和虚部数据 ig=fscanf(fid,'%f',1); %ig=1时,f为采样频率sf,ig=2时,f为频率间隔df f=fscanf(fid,'%f',1); fno=fscanf(fid,'%s',1); %输出数据文件名 b=fscanf(fid,'%f',[ig,inf]); %实测时域或频域数据 status=fclose(fid); %% clc; clear all; format long [FileName,PathName] = uigetfile('*.mat', 'Select the Mat-files of time signal'); %窗口读文件,并获取包含路径的文件名 if isequal(FileName,0) disp('User cancel the selection'); %如果取消选择则显示提示 return; else FULLFILE=fullfile(PathName,FileName); Signal_str= sprintf('User selected signal file: %s',FULLFILE); disp(Signal_str); Struct=load(FULLFILE); end c=fieldnames(Struct); %得到一个元胞数组,包含Struct中各个域名(倘若有多个的话) b=getfield(Struct,c{1}); %获取c{1}对应的域中的内容 b=b(3601:9600); %% %ig=1时域数据如冲击响应、自由振动、互相关函数、随机减量法处理结果 %ig=2频域数据如频响函数实部和虚部数据 ig=input('数据类型ig='); f=input('采样频率f=');%指定采样频率 mn=input('计算模态阶数mn=');%指定计算模态阶数
模态参数识别方法的比较研究 发表时间:2017-09-07T14:07:39.937Z 来源:《防护工程》2017年第9期作者:安鹏强[导读] 本文将频域法、时域法和整体识别法识别模态参数的应用范围、存在的优缺点进行对比、分析和说明。 航天长征化学工程股份有限公司兰州分公司甘肃兰州 730050 摘要:本文将频域法、时域法和整体识别法识别模态参数的应用范围、存在的优缺点进行对比、分析和说明,对模态参数识别的研究方向具有指导意义。 关键词:模态参数识别;频域法;时域法;整体识别法 引言 多自由度线性振动系统的微分方程可以表达为[1]: [M]{x ?(t)}+[C]{x ?(t)}+[K]{x(t)}={f(t)} 通过将试验采集的系统输入与输出信号用于参数识别的方法中,进而对系统的模态质量、模态阻尼、模态刚度、模态固有频率及模态振型进行识别,这一过程称为结构的模态参数识别。本文将对模态参数识别的频域法、时域法及整体识别法三者的应用范围、存在的优缺点进行对比、分析和说明。 1频域法 模态参数识别的频域法是结合傅里叶变换理论[1]形成的,这种方法是从实测数据的频响函数曲线上对测试结构的模态参数进行估计。图解法[1]是最早的频域模态参数识别方法,随之,又陆续发展了导纳圆拟合法[2]、最小二乘迭代法[2]、有理式多项式法[2]等多种频域模态参数识别方法。 频域法的优点是直观、简便,噪声影响小,模态定阶问题易于解决。频域法识别模态参数的思路是首先借助实测频响函数曲线对模态参数进行粗略的估计,进而将初步观测的模态估计值作为一些频域识别法的最初输入值,通过反复的迭代获取最终的模态参数。频域识别方法对于实测频响函数的分布容易控制,其输人数据是主观人为的。频域中参数识别方法识别结果的精准度,取决于测试试验中获得的频响函数质量的好坏。判断实测频响函数的质量,就要看其曲线的光滑[2]和曲线的饱满程度[2],曲线越光滑越饱满的实测频响函数,用其进行参数识别时,识别精度越高。 2时域法 模态参数识别的时域法的研究与应用比频域法晚,时域法可以克服频域法的一些缺陷。时域模态参数识别的技术优点在于无需获得激励力即可进行参数的识别[3-7]。对于一些大型的工程结构如大坝、桥梁等,获取激励荷载不太容易,但容易测得他们在风、地脉动等环境激励下的响应数据,把这些响应数据用于时域中一些参数识别的方法上,即可对测试结构的模态参数进行识别。 时域法的优点不仅在于其无需激励设备、减少测试费用而且可以避免由信号截断而造成对识别精度的影响,并且可实现对大型工程结构的在线参数识别,真实地反映结构的动力特性。但是由于响应信号中含有大量的噪声,这会使得所识别的模态中含有虚假模态。目前,对于如何剔除噪声模态、优化识别过程中的一些参数问题、以及怎样更稳定、可靠地进行模态定阶等成为时域法研究中的重要课题。目前常用的判定模态真假的方法是稳定图方法[8],该方法的基本思想在于不同阶次的系统模型会对虚假模态的影响比较大,在稳定图中出现次数最多的模态可认为是系统的真实模态。 3整体识别法 结构模态参数识别的单输入单输出类型是针对单个响应点的数据进行相应的计算,从而得到该测点对应的模态频率、阻尼比和振型系数等动力参数,但是对于有多个测点的试验,若要用单输入单输出类型的识别方法对多自由度结构进行参数识别,则需要对各个测点单独计算来识别各个测点对应的模态参数,通过对各个测点分别计算处理,得到每一个测点数据所识别的模态参数,然后求取所有测点响应识别的算术平均值来作为整体结构最终的识别结果。理论上讲,用每个测点数据识别的结果应该是一样的,但实际测试实验中,因测试实验中测点布置位置的不同、测试中其他因素及识别方法上的不完善会使得各个测点的识别结果不同、识别精度不同及错误的识别结果等现象。因此,对于多测点的测试试验,用单输入单输出类型的识别方法进行参数识别不仅会因多次重复导致计算工作量复杂累赘而且识别结果的正确性及精度无法保证。 整体识别的方法避免了单输入单输出类型的一些不足之处。该方法通过将结构上的所有测点的实测数据同时进行识别计算,所识别得到的结果作为结构整体的模态参数,每阶模态的固有频率和阻尼比是唯一的,减小了随机误差,提高了识别进度,并且使得计算工作量大大减少。 4三种识别方法的比较分析 (1)频域内的模态参数识别方法方便、快捷,但在实际运用中人为的主观选择性对识别结果的影响较大; (2)基于环境激励的时域模态参数的识别方法具有测试试验的花费较少、测试相对安全,并且识别精度较高。因此,基于环境激励的时域模态参数的识别方法已成为科研工作者研究的热点问题。 (3)对于多测点的测试试验,用频域和时域的单输入单输出类型识别模态参数不仅会因多次重复导致计算工作量复杂累赘而且识别结果的正确性及精度无法保证。整体识别法将所有测点的数据同时进行处理计算,得到结构的整体识别结果。整体识别方法通过对所有测点数据同时进行识别计算,减小了随机误差,提高了识别进度,使得计算工作量大大减少。 (4)对比时域和频域识别方法对虚假模态的剔除,可以看出,频域中的剔除虚假模态主要依据模态频率在频幅曲线图上会出现峰值的原理,利用该峰值处的幅值角是否为0°或180°来剔除虚假模态;相对频域剔除虚假模态的方法来说,时域中的剔除虚假模态的方法有定量的精度判别指标。总体看来,时域识别方法无法判别是否已将系统的所有模态进行识别且对于阻尼比的确定还有待研究。参考文献 [1] 曹树谦,张德文,萧龙翔. 振动结构模态分析-理论、实验与应用[M]. 天津大学出版社,2001. [2] 王济,胡晓. Matlab在振动信号处理中的应用[M]. 水利水电出版社,2006.
气动系统压力、流量、气管壁厚、用气量计算 1 气动系统相关计算 (1) 1.1 试验用气量计算 (1) 1.2 充气压力计算 (2) 1.3 管径及管路数量计算 (2) 1.3.1 根据流量计计算管径及管路数量 (2) 1.3.2 根据减压阀计算管径及管路数量 (4) 1.3.3 管径及管路数确定 (5) 1.4 气管壁厚计算 (6) 1.5 理论充气时间和一次试验用气量核算 (6) 1气动系统相关计算 1.1试验用气量计算 根据系统要求,最大气流量需求发生于:漏气量为 2.5m3/s(标准大气压下的气体体积)时,筒内压力充至 1.35MPa压力的时间不大于30s,并能保证持续不少于10s。 根据公式P1V1=P2V2(1) 求得单位最小流量:Vmin-0.1MPa=((1.35/0.1)×(0.0675+0.01)/30)+2.5=2.539m3/s 其中0.0675m3是装置密闭腔容积; 0.01m3是管路容积(管路长度取20m)。 因为气源提供的流量在10MPa压力下不小于2.6m3/s(标准大气压),而系统输入压力最大为16MPa,所以气源满足系统流量要求。后文中按照输入
流量为2.6m3/s进行计算。 质量流量(Kg/h)=体积流量×密度,20℃时,标准大气压下气体密度为1.205kg/m3,即质量流量=2.6×1.205×3600=13014kg/h。 1.2充气压力计算 一般密闭腔充气压力设置为目标值的1.05至1.1倍,由于系统要求的漏气量较大,初步设定充气压力为目标值的2.0倍。本装置需对密闭腔充气至最大1.35MPa,即目标值为1.35MPa,充气压力为P:P=2.0×1.35=2.70MPa。 即减压阀出口压力初步设定为2.70MPa。 1.3管径及管路数量计算 1.3.1根据流量计计算管径及管路数量 流量计一般都有量程限制,如果流量过大,就必须将总气量分几路进行输送,以保证单路的输送流量符合流量计量程,根据流量计的量程计算分路数。 表4 流量计计算参数表 量(体积流量=质量流量/减压阀出口密度ρ)。 表5 流量计计算参数表
模态参数辨识的频域方法 吕毅宁 目录 模态参数辨识的频域方法 (1) 单点输入单点输出(SISO) (1) 图解法............................................................................................................ 1 频域多参考点模态参数辨识(MIMO ) ............................................................ 2 频域模态测试和参数辨识的可控性和可观性. (5) 单点输入单点输出(SISO) 图解法 1) 峰值检测 半功率点 )(2 1 )()(21r j H j H j H ωωω= = (1) r r ωωωξ21 2-= (2) 2) 模态检测 () ir r jr r r r ij r jr ir r r r r jr ir r r ij Q A Q j j Q j H ψσψσσψψωσωψψω-= -= -= +-= ) ()( (3) 式中,r Q 是模态比例换算因子。 在上式中,() r ij A 是模态质量r m 和模态刚度r k 的函数,又由下面的关系 2r r r m k ω= (4) 联立即可求得模态质量和模态刚度。 3) 圆拟合法 固有频率
max ==ω ωωd ds r r (5) 振型 r er I ij g k H 1 -= (6) jr ir r er k k ??= (7) er k 是等效模态刚度,r r r k g η= 是等效结构阻尼。 ()r ij r I ij ir r r jr R g k )(2==-H ?? (8) 模态阻尼 r g ) 1(2tan 211 ωα-= (9) r g ) 1(2tan 222 -= ωα (10) 2 tan 2 tan 22 1 12ωωω+-= r r g (11) 模态刚度 由 r er r I ij g k H 1 )1(-= =ω (12) 可得 r r I ij er g H k )1(1 =-= ω (13) 模态质量 2 r r r k m ω= (14) 其他方法,如正交多项式曲线拟合法,非线性优化辨识方法。 频域多参考点模态参数辨识(MIMO ) 一个N 自由度粘性阻尼线性系统,对它施加P 个激励力,在N 个点上进行响应
气动调节阀选型及计算 执行器是控制系统的终端控制元件,是重要的环节,气动调节阀在常用的执行器中约占85﹪以上。控制系统中因气动调节阀造成不能投运或运行不良者有占50﹪-60﹪以上。其中除提供的工艺参数出入较大,阀制造质量欠佳和使用不当外,选型与计算的方法不妥则是一个相当突出的因素。因此,如何合理正确地选择和计算气动调节阀就是自控设计中至关重要的问题了。 调节阀按调节仪表的控制信号,直接调节流体的流量,在控制系统中起着十分重要的作用。要根据使用条件和用途来选择调节阀。选择调节阀项目有:结构型式、公称通经、压力-温度等级、管道连接、上阀盖型式、流量特性、材料及执行机构等。深入研究各个项目和它们之间的相互关系,是极其重要的。选择调节阀必须知道控制系统的各种工艺参数,以及调节仪表、管道连接等基本条件,才能正确地选择调节阀。下面为一般选用调节阀的基本准则:(图一、图二)
(图一) 调节阀的选择 工艺流体条件 流体名称、流量、进/出口 确认选择条件 压力、全开/全关时压差、温度、 比重、粘度、泥浆等。 选择品种规格 调节仪表条件 流量特性、作用型式、调节 仪表输出信号等。 写出规格书 管道连接条件 公称压力、法兰连接型式、 材料等。 (图二) 选型和计算(定尺寸)是选择一个调节阀的两个重要部分。它们是不同的,然而又是互相关联的。以往,各工业部门的自控设计的选阀工作有些基本上没有考虑到它们之间的在联系。对国一般产品来说,用一组工艺参数计算两个不同阀型的流通能力,临界条件下的计算结果最大可相差40%以上。
不同结构的调节阀有其各自的压力恢复特性。此特性用压力恢复系数F L或最大有效压差比X T表示。一般的单、双座阀等属于低压力恢复阀,F L和X T较大;蝶阀和球阀等属于高压力恢复阀,F L和X T较小;偏心旋转阀则介于两者之间。参数F L和X T的引入有助于在计算中根据已知的工艺参数来确定真正有效压差,以计算出精确的流通能力。 F L和X T的数值必须在阀型选定之后才能获得,而阀型的选定不仅与流体的性状、压力、温度、腐蚀性等因素有关,并且与流通能力、可调围、允许压差等参数有关;但是这些参数必须经计算后才能得到,而往往由于这些参数的限制又必须改选阀型;因此问题的关键就在于要设计出一套合理的方法和步骤,把选型和计算作为一个有机的整体综合起来考虑。 气动调节阀选型和计算包括以下几部分。 1.气动调节阀的选型和选材 调节阀的选型按照工艺和自控专业提出的各项要求进行。在选型中主要考虑以下各个方面:流体的性状、静压、温度、压差、腐蚀性、对阀的泄漏要求、阀的动作方式、管道配置、以及流通能力和可调围等。 流体腐蚀性的影响主要体现在阀体和阀芯材料的选择上。由于不能排除某些材料只许在某种特殊的阀型中使用的限制条件,因此并不是每种阀型均可任意选择材料。阀体材料的选取主要考虑流体介质的腐蚀性、静压和材料的许用温度。阀芯材料的选取主要考虑流体介质
一.模态参数识别的单模态法 常见的单模态识别有三种方法:直接读数法(分量分析法)、最小二乘圆拟合法和差分法。 所谓单模态识别法,是指一次只识别一阶模态的模态参数,所用数据为该阶模态共振频率附近的频响函数值。待识别的这阶模态称为主导模态,余模态称为剩余模态,剩余模态的影响可以全部忽略或简化处理。 1. 直接读数法(分量分析法) 1)基本公式 所谓分量分析法就是讲频响函数分成实部分量和虚部分量来进行分析。 N 自由度结构系统结构,p 点激励l 点响应的实模态频响函数可表示如下: 2222222111 ()(1)(1)N r r lp r er r r r r g H j K g g ωωωω=??--=+??-+-+?? ∑ (1.1) 其中r er lr pr K K φφ= ,为第二阶等效刚度 /r r ωωω= g 2r r r ζω= ,为第r 阶模态结构阻尼比 当ω趋近于某阶模态的固有频率时,该模态起主导作用,称为主导模态或者主模 态。 在主模态附近,其他模态影响较小。若模态密度不是很大,各阶模态比较远离,其余模态的频响函数值在该模态附近很小,且曲线比较平坦,即几乎不随频率而变化,因此其余模态的影响可以用一个复常数来表示,第r 阶模态附近可用剩余模态表示成: 222222211 ()()(1)(1)R I r r lp C C er r r r r g H j H H K g g ωωωω??-= -++??-+-+?? (1.2) ()lp H ω的实部和虚部可分别表示如下: 222211 ()(1)R R r lp C er r r H H K g ωωω??-= +??-+?? (1.3) 2221 ()(1)I I r lp C er r r g H H K g ωω??-= +??-+?? (1.4)
(19)中华人民共和国国家知识产权局 (12)发明专利申请 (10)申请公布号 (43)申请公布日 (21)申请号 201910294878.3 (22)申请日 2019.04.12 (71)申请人 浙江大学 地址 310058 浙江省杭州市西湖区余杭塘 路866号 (72)发明人 杨华 陈丽华 罗鹏 陈加政 (74)专利代理机构 杭州求是专利事务所有限公 司 33200 代理人 万尾甜 韩介梅 (51)Int.Cl. G05D 1/04(2006.01) G05B 13/04(2006.01) (54)发明名称一种基于气动参数在线辨识的高超声速飞行器纵向控制方法(57)摘要本发明公开了一种基于气动参数在线辨识的高超声速飞行器纵向控制方法。该方法是首先采用结合了扩展卡尔曼滤波算法和迭代滤波理论的迭代扩展卡尔曼滤波算法对气动参数进行在线辨识,为后续的控制提供较精确的模型;然后基于辨识得到的气动参数,设计自适应滤波反步控制器对高超声速飞行器的纵向方程进行精确控制。本发明采用的迭代扩展卡尔曼滤波算法相比传统的扩展卡尔曼滤波算法具有更高的精度,能够更加准确地辨识出气动参数。本发明提出的控制策略能有效克服“天地参数不一致”的现象,通过在线辨识提高模型的准确性,减轻控 制系统的压力。权利要求书3页 说明书12页 附图9页CN 110187713 A 2019.08.30 C N 110187713 A
1.一种基于气动参数在线辨识的高超声速飞行器纵向控制方法,其特征在于,该方法是先采用结合了扩展卡尔曼滤波算法和迭代滤波理论的迭代扩展卡尔曼滤波算法对气动参数进行在线辨识;再采用自适应滤波反步控制器对高超声速飞行器进行精确控制。 2.根据权利要求1中所述的基于气动参数在线辨识的高超声速飞行器纵向控制方法,其特征在于,包括如下步骤: 步骤(1)针对高超声速飞行器纵向方程,将待辨识参数作为系统状态得到扩展的状态方程, 并将量测方程进行线性化得到扩展卡尔曼滤波算法进行辨识得到实时的状态值 步骤(2)在上述状态估计点对量测方程进行泰勒级数展开来降低线性化误差,从而得到更好的状态的估计值,并迭代多步,得到迭代扩展卡尔曼滤波算法,对气动参数进行在线辨识; 步骤(3)基于步骤(2)辨识得到的气动参数,得到较为精确的高超声速飞行器纵向方程,针对该方程,采用自适应滤波反步控制器进行控制。 3.根据权利要求2所述的基于气动参数在线辨识的高超声速飞行器纵向控制方法,其特征在于,步骤(2)采用的迭代扩展卡尔曼滤波算法,是在扩展卡尔曼滤波算法的基础上结合迭代滤波理论,通过在扩展卡尔曼滤波算法得到的状态估计点对量测方程进行泰勒级数展开得到更好的状态估计值,从而得到更精确的辨识结果。 4.根据权利要求2所述的基于气动参数在线辨识的高超声速飞行器纵向控制方法,其特征在于,基于迭代扩展卡尔曼滤波算法进行在线辨识得到气动参数后,即可以得到较为精确的高超声速飞行器纵向方程;由于飞行器的速度主要通过发动机的油门开度η改变推力来控制,高度则通过舵偏角δe 改变俯仰力矩来控制, 因此,将高超声速飞行器的纵向运动分为高度子系统和速度子系统; 则高度子系统的动力学方程为: 速度子系统的方程表示为: 其中:V为飞行器的速度,h为飞行高度,γ表示航迹角,α为迎角,ωy 为俯仰角速度,这五个状态构成了纵向的状态变量;m表示飞行器的质量,μ表示引力常数,I y 为转动惯量,r为飞行器质心到地心的距离,T为发动机提供的推力,D ,L ,M分别为在线辨识具体参数后的阻力、升力和俯仰力矩,其具体的表达式为: 权 利 要 求 书1/3页2CN 110187713 A
模态分析方法在发动机曲轴上的应用研究 xx (xx大学 xxxxxxxx学院 , 山西太原 030051) 摘要:综述模态分析在研究结构动力特性中的应用,介绍模态分析的两大方法:数值模态分析与试验模态分析。并着重介绍目前的研究热点一一工作模态分析。通过发动机曲轴的模态分析这一具体的实例,综述了运行模态分析国内外研究现状,指出了其关键技术、存在问题以及研究发展方向。 关键词:模态分析数值模态试验模态工作模态 Abstract :Sums up methods of model analysis applied on the research of configuration dynamic;al characteristio. It introduces two methods of model analysis: numerical value model analysis and experimentation model analysis. Then it stresses the hotspot-working model analysis.Some key techniques, unsolved problems and research directions of OMA were also discussed. Key words:Model analysis Numerical value model analysis Experimentation model analysis Working model analysis 1、引言 1.1模态分析的基本概念 物体按照某一阶固有频率振动时,物体上各个点偏离平衡位置的位移是满足一定的比例关系的,可以用一个向量表示,这个就称之为模态。模态这个概念一般是在振动领域所用,你可以初步的理解为振动状态,我们都知道每个物体都具有自己的固有频率,在外力的激励作用下,物体会表现出不同的振动特性。 一阶模态是外力的激励频率与物体固有频率相等的时候出现的,此时物体的振动形态叫做一阶振型或主振型;二阶模态是外力的激励频率是物体固有频率的两倍时候出现,此时的振动外形叫做二阶振型,以依次类推。
参数辨识 参数辨识的步骤 飞行器气动参数辨识是一个系统工程,包括四部分:①试验设计,使试验能为辨识提供含有足够信息量且信息分布均匀的试验数据;②气动模型结果确定,即从候选模型集中,根据一定的准则和经验,选出最优的气动模型构式;③气动参数辨识,根据辨识准则和数据求取模型中待定参数,这是气动辨识定量研究的核心阶段;④模型检验,确认所得气动模型是否确实反映了飞行器动力学系统中气动力的本质属性。这四个部分环环相扣,缺一不可,要反复进行,直到对所得气动模型满意为止。 参数辨识的方法 参数辨识方法主要有最小二乘算法、极大似然法、集员辨识法、贝叶斯法、岭估计法、超椭球法和鲁棒辨识法等多种辨识方法。虽然目前参数辨识的领域己经发展了多种算法,但是用于气动参数估计的算法主要有:极大似然法(ML),广义Kalman滤波(EKF)法,模型估计法(EBM )、分割及多分割算法(PIA及MPIA)、最小二乘法,微分动态规划法等。 因为最小二乘法和极大似然法是两种经典的算法,目前己经发展得相当成熟。最小二乘法适于线性模型的参数辨识,可以用于飞行器系统辨识中很多的线性模型,如惯性仪表误差系数的辨识,线性时变离散系统初始状态的辨识及多项式曲线拟合等。目前最小二乘法已经广泛应用于工程实际中。而极大似然算法因其具有渐进一致性、估计的无偏性、良好的收敛特性等特点而被广泛应用于飞行器参数辨识领域。 最小二乘法大约是1975年高斯在其著名的星体运动轨道预报研究工作中提出来的。后来,最小二乘法就成了估计理论的奠基石。由于最小二乘法原理简单,编程容易,所以它颇受人们重视,应用相当广泛。 极大似然估计算法在实践中不断地被加以改进,这种改进主要表现在三个方
各种模态分析方法总结与比较 一、模态分析 模态分析是计算或试验分析固有频率、阻尼比和模态振型这些模态参数的过程。 模态分析的理论经典定义:将线性定常系统振动微分方程组中的物理坐标变换为模态坐标,使方程组解耦,成为一组以模态坐标及模态参数描述的独立方程,以便求出系统的模态参数。坐标变换的变换矩阵为模态矩阵,其每列为模态振型。 模态分析是研究结构动力特性一种近代方法,是系统辨别方法在工程振动领域中的应用。模态是机械结构的固有振动特性,每一个模态具有特定的固有频率、阻尼比和模态振型。这些模态参数可以由计算或试验分析取得,这样一个计算或试验分析过程称为模态分析。这个分析过程如果是由有限元计算的方法取得的,则称为计算模记分析;如果通过试验将采集的系统输入与输出信号经过参数识别获得模态参数,称为试验模态分析。通常,模态分析都是指试验模态分析。振动模态是弹性结构的固有的、整体的特性。如果通过模态分析方法搞清楚了结构物在某一易受影响的频率围各阶主要模态的特性,就可能预言结构在此频段在外部或部各种振源作用下实际振动响应。因此,模态分析是结构动态设计及设备的故障诊断的重要方法。 模态分析最终目标是在识别出系统的模态参数,为结构系统的振动特性分析、振动故障诊断和预报以及结构动力特性的优化设计提供依据。 二、各模态分析方法的总结
(一)单自由度法 一般来说,一个系统的动态响应是它的若干阶模态振型的叠加。但是如果假定在给定的频带只有一个模态是重要的,那么该模态的参数可以单独确定。以这个假定为根据的模态参数识别方法叫做单自由度(SDOF)法n1。在给定的频带围,结构的动态特性的时域表达表示近似为: ()[]}{}{T R R t r Q e t h r ψψλ= 2-1 而频域表示则近似为: ()[]}}{ {()[]2ωλωψψωLR UR j Q j h r t r r r -+-= 2-2 单自由度系统是一种很快速的方法,几乎不需要什么计算时间和计算机存。 这种单自由度的假定只有当系统的各阶模态能够很好解耦时才是正确的。然而实际情况通常并不是这样的,所以就需要用包含若干模态的模型对测得的数据进行近似,同时识别这些参数的模态,就是所谓的多自由度(MDOF)法。 单自由度算法运算速度很快,几乎不需要什么计算和计算机存,因此在当前小型二通道或四通道傅立叶分析仪中,都把这种方法做成置选项。然而随着计算机的发展,存不断扩大,计算速度越来越快,在大多数实际应用中,单自由度方法已经让位给更加复杂的多自由度方法。 1、峰值检测 峰值检测是一种单自由度方法,它是频域中的模态模型为根据对系统极点进行局部估计(固有频率和阻尼)。峰值检测方法基于这样的事实:在固有频率附近,频响函数通过自己的极值,此时其实部为零(同相部分最
%ITDxx识别模态参数 clear clc close all hidden format long %% txt文件下输入 fni=input('ITD法模态参数识别-输入数据文件名:','s'); fid=fopen(fni,'r'); mn=fscanf(fid,'%d',1);%模态阶数 %定义输入实测数据类型 %ig=1时域数据如冲击响应、自由振动、互相关函数、随机减量法处理结果%ig=2频域数据如频响函数实部和虚部数据 ig=fscanf(fid,'%f',1); %ig=1时,f为采样频率sf,ig=2时,f为频率间隔df f=fscanf(fid,'%f',1); fno=fscanf(fid,'%s',1);%输出数据文件名 b=fscanf(fid,'%f',[ig,inf]);%实测时域或频域数据 status=fclose(fid); %% clc; clear all;
format long [FileName,PathName] = uigetfile('*.mat', 'Select the Mat-files of time signal'); %窗口读文件,并获取包含路径的文件名 if isequal(FileName,0) disp('User cancel the selection');%如果取消选择则显示提示 return; else FULLFILE=fullfile(PathName,FileName); Signal_str= sprintf('User selected signal file:%s',FULLFILE); disp(Signal_str); Struct=load(FULLFILE); end c=fieldnames(Struct);%得到一个元胞数组,包含Struct中各个域名(倘若有多个的话) b=getfield(Struct,c{1}); %获取c{1}对应的域中的内容 b=b(3601:9600); %% %ig=1时域数据如冲击响应、自由振动、互相关函数、随机减量法处理结果 %ig=2频域数据如频响函数实部和虚部数据 ig=input('数据类型ig='); f=input('采样频率f=');%指定采样频率 mn=input('计算模态阶数mn=');%指定计算模态阶数
振动模态分析理论与应用 模态参数识别频域法 当系统阻尼为比例阻尼或小阻尼时,阻尼矩阵经模态坐标变换后可以对角化,模态参数为实数,频响函数可按实模态展开。若在p 点激励,在l 点测量,则频响函数可表示为对于粘性阻尼有 ∑ 1 2 ωω ξ2ωω1 )ω(N i i i i lp lp j D H =+= 对于结构阻尼有 ∑ 1 2ωω 1 )ω(N i i i lp lp jg D H =+= 以上两式即为实模态参数识别的基本公式 6.1 实模态识别图解法 6.1.1 共振法 这是一种经典的模态分析方法,其基本思想是:当激励频率在系统某阶固有频率r ω附近时, 该阶模态导纳便起主导作用,其余各阶模态导纳的影响可忽略不计。即 )ω(≈)ω(lpr lp H H 此时,整个系统等效于一个单自由度系统。利用幅频特性和相频特性,便可确定系统的模态参数(参看图6-1)。 在待测结构上选择l 个测试点,求其中某点P 对所有各点的位移导纳。点数l 一般应等于或大于拟选的模态数N (自由度数)。则p 点对任意点l 的位移导纳可作如下处理: 当激振频率在r 阶固有频率附近时有 () () 2 22 2∞ 1 2 ωωξ4ωω1≈ ωω ξ2ωω1 )ω(∑ ++==r r i r lp i i i i i lp lp j D j D H 因此,测得的幅频曲线)ω(lp H 的第r 个峰值位置(共振频率点),便可近似确定r 阶固有频率r ω。由r ω两侧半功率带宽,可以确定r 阶模态阻尼比)ω2/Δω(ξr r =。由r ω处位移
有 ()r r lp r lp D H ξ2)ω(= 所以 ()()r lp r r lp H D ωξ2= 由因为 ()r pr lr r lp k D φ φ= 故在令pr φ的值等于1(振型中各元素具有确定的比例,其绝对值可认为地指定,不妨取第r 阶振型第p 个元素pr φ的值等于1)时,由原点导纳曲线的峰值可得r 阶模态刚度为 ) ω(ξ21 r pp r r H k = 此外,当r ωω=时,l 个导纳的幅值分别为 r r pr r r p k H ξ2φφ|)ω(|11= r r pr r r p k H ξ2φφ|)ω(|22= r r pr lr r lp k H ξ2φφ|)ω(|= 写成矩阵形式 = lr r r r r pr r lp r p r p k H H H φφφξ2φ| )ω(|| )ω(||)ω(|2121 因此,第r 阶振型为 {}±±±==| )ω(||)ω(|| )ω(|φφ φφ2121r lp r p r p lr r r r H H H 为表示振型的几何形状,上试中各导纳幅值应考虑其相位,可用正负号表示同相或反相,对 于实模态,其振型向量的各分量都是实数,且只有大小和正负之差。因此,系统作固有振动时,各坐标点同时达到极值,同时通过平衡位置。用共振法确定模态参数,方法简单直观。但由于忽略了相邻模态的影响,识别出的模态精度不高,特别是识别振型和阻尼时,可能引起较大的误差。另外当各阶模态耦合较密时可能识别不出单个模态。因此这种方法一般只用于对模态的初步分析。 6.1.2分量分析法 分量分析法的思想是利用导纳的实频和虚频特性识别出系统的模态参数。其优点是能考虑其余模态的影响。
环境振动下模态参数识别方法综述 摘要:模态分析是研究结构动力特性的一种近代方法,是系统识别方法在工程振动领域中的应用。环境振动是一种天然的激励方式,环境振动下结构模态参数识别就是直接利用自然环境激励,仅根据系统的响应进行模态参数识别的方法。与传统模态识别方法相比,具有显著的优点。本文主要是做了环境振动下模态识别方法的一个综述报告。 关键词:环境振动模态识别综述 Abstract: The modal analysis is the study of structural dynamic characteristics of a modern method that is vibration system identification methods in engineering applications in the field. Ambient vibration is a natural way of incentives, under ambient vibration modal parameter identification is the direct use of the natural environment, incentives, based only on the response of the system for modal parameter identification method. With the traditional modal identification methods, has significant advantages. This paper is a summary report of the environmental vibration modal identification method. Keywords: Ambient vibration ;modal parameters ;Review 随着我国交通运输事业的发展,各种形式的大、中型桥梁不断涌现,由于大型桥梁结构具有结构尺大、造型复杂、不易人工激励、容易受到环境影响、自振频率较低等特点,传统模态参数识别技术在应用上的局限性越来越突出。传统的振动试验采用重振动器或落锤激励桥梁,需要投入大量人力和试验设备,激励成本增高,难度大,而且对于桥梁这样的大型复杂结构,激励(输入)往往很难测得,也不适合长期监测的实验模态分析。 环境振动是指振幅很小的环境地面运动。系由天然的和(或)人为的原因所造成,例如风、海浪、交通干扰或机械振动等,受激结构的振幅较小,但响应涵盖频率丰富。系统或者结构的模态参数包括:模态频率、模态阻尼、模态振型等。模态参数识别是系统识别的一部分,通过模态参数的识别可以了解系统或结构的动力学特性,这些动力特性可以作为结构有限元模型修正、故障诊断、结构实时监测的评定标准和基础。环境振动下的模态参数识别就是利用自然环境激励,根据结构的动力响应来进行模态参数识别的方法。 1 环境振动下模态参数识别的优点 传统的模态识别方法利用结构的输入和输出信号识别结构的模态参数。对于工作中的大型结构,无论是对其实施外部激励还是测试外部激励都十分困难。而环境振动方法仅仅利用被测试的输出数据识别结构的时间序列分析法模态参数。用环境振动对结构进行模态参数识别,具有明显的优点: