《智能机器人》选修课程
目录
项目一会走路的机器人(电机驱动)
项目二机器人玩碰碰车(碰撞传感器)项目三机器人走向光明(光敏传感器)项目四会唱歌的机器人(声控传感器)项目五跨栏机器人(灰度传感器)
项目六机器人的眼睛(红外传感器)
项目七灭火机器人(火焰传感器)
项目八足球机器人(指南针与磁传感器)项目九投篮机器人
项目十擂台机器人
项目十一探险机器人
项目十二接力赛跑机器人
项目六机器人的眼睛(红外传感器的应用)
活动时间:2008年6月1日活动地点:智能电子工作室
活动内容:机器人走迷宫比赛
活动对象:0515班机器人课题选修小组成员
活动目的:
了解红外传感器的工作原理
掌握机器人对障碍物的检测函数与编程方法。
普及机器人知识,培养学生的团队协作精神及动手动脑的能力。活动过程:
一、准备阶段(约15分钟):
1、教具准备:
机器人展品、配件,照相机,计算机,移动投影与幕布,红外发射、接收传感器若干,秒表。
2、知识准备:
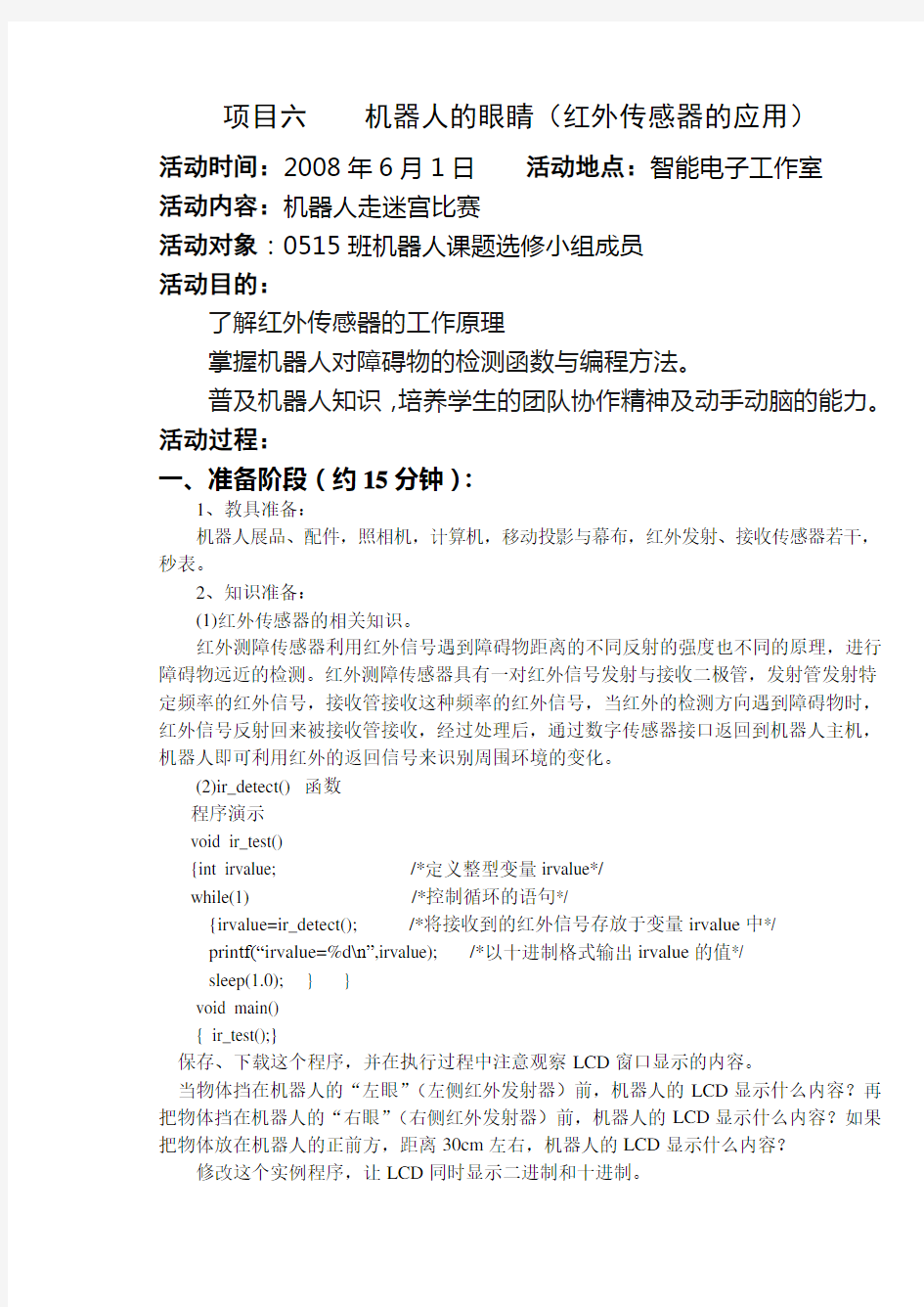
(1)红外传感器的相关知识。
红外测障传感器利用红外信号遇到障碍物距离的不同反射的强度也不同的原理,进行障碍物远近的检测。红外测障传感器具有一对红外信号发射与接收二极管,发射管发射特定频率的红外信号,接收管接收这种频率的红外信号,当红外的检测方向遇到障碍物时,红外信号反射回来被接收管接收,经过处理后,通过数字传感器接口返回到机器人主机,机器人即可利用红外的返回信号来识别周围环境的变化。
(2)ir_detect() 函数
程序演示
void ir_test()
{int irvalue; /*定义整型变量irvalue*/
while(1) /*控制循环的语句*/
{irvalue=ir_detect(); /*将接收到的红外信号存放于变量irvalue中*/
prin tf(“irvalue=%d\n”,irvalue); /*以十进制格式输出irvalue的值*/
sleep(1.0); } }
void main()
{ ir_test();}
保存、下载这个程序,并在执行过程中注意观察LCD窗口显示的内容。
当物体挡在机器人的“左眼”(左侧红外发射器)前,机器人的LCD显示什么内容?再把物体挡在机器人的“右眼”(右侧红外发射器)前,机器人的LCD显示什么内容?如果把物体放在机器人的正前方,距离30cm左右,机器人的LCD显示什么内容?
修改这个实例程序,让LCD同时显示二进制和十进制。
printf(“ir=%b.ir=%d\n”,irvalue, irvalue);
运行后得到以下结论:
当机器人正前方没有物体时,LCD显示的是“0”或“0b00”;
当机器人右前方有物体时,LCD显示的是“1”或“0b01”;
当机器人左前方有物体时,LCD显示的是“2”或“0b10”;
当机器人正前方有物体时,LCD显示的是“3”或“0b11”。
现在机器人已经可以识别正前方、左前方和右前方有没有物体了,下面可以根据本次任务需要来设置ir_detect() 函数。
二、发放机器人走迷宫任务书,组织比赛(约20分钟):
1、宣读规则:
采用轮换制,每个机器人都有2-3次比赛机会。用比赛中成绩最好一次来确定胜利者。在比赛中,机器人行进到指定位置可得到相应的基本分,并根据到达终点的具体时间和碰撞墙壁资料进行加、扣分。
2、分组抽签:
决定比赛次序。
3、编制调试机器人程序:
强调小组成员分工协作。在活动中每一个学生的观察分析、动手、创造能力,每一个成员的参与、竞争、实践、协作意识都可进入评分加分。
4、按抽签顺序进行比赛评分
记录比赛时间和碰撞墙壁次数。
三、宣布成绩(约2分钟)
计分并宣布成绩。
四、比赛总结(约3分钟)
1、优秀作品展示,设计者说明思路。
2、本课收获、体会,写留言。
表现突出,创造性强的学生总结后表扬发奖。
3、收拾活动场地,清点摆放活动材料,养成好习惯。
机器人走迷宫任务书
任务要求:
应用相关传感器,编制机器人智能运行程序,要求机器人能够自动从比赛场地中的起始区出发,在规定的时间内,寻找最佳路线走出迷宫(以机器人到达迷宫场地终点处为准)。
比赛场地:
比赛场地是一个长250cm、宽250cm 正方形区域。形状参考下图所示:
a
b
c
d
评分标准
⑴基本得分:到达a处得20分,到达b处得40分,到达c处得60分,到达d处得80分,在180秒内到达终点得100分。
⑵加分:
①机器人在停止区内而未碰到停止区周围的护墙加10分。
②以130秒为基准时间,每提前1秒钟完成任务加1分。
⑶扣分:
①以130秒为基准时间,每超时1秒钟减1分,直到比赛结束为止。
②机器人比赛过程中碰到护墙一次扣2分,最多扣20分。
评分表
活动内容:机器人走迷宫组别:
第一轮:
计时:秒到达□a,□b,□c,□d,□终点基本得分130- = (加/扣分)
停止区内碰到护墙□是,加0分□否,加10分
碰撞次数:扣分
结论:□完成任务□未完成任务得分:
队员签名:
第二轮:
计时:秒到达□a,□b,□c,□d,□终点基本得分130- = (加/扣分)
停止区内碰到护墙□是,加0分□否,加10分
碰撞次数:扣分
结论:□完成任务□未完成任务得分:
队员签名:
第三轮:
计时:秒到达□a,□b,□c,□d,□终点基本得分130- = (加/扣分)
停止区内碰到护墙□是,加0分□否,加10分
碰撞次数:扣分
结论:□完成任务□未完成任务得分:
队员签名:
任务七灭火机器人(火焰传感器)
活动时间:2008年6月日第节课
活动内容:机器人灭火比赛
活动对象:0515班
活动目的:普及机器人知识,培养学生的团队协作精神及动手动脑的能力。
活动过程:
一、准备阶段:
教具准备:机器人展品、配件、程序调试安装好,录像机、录像带、资料、比赛光盘、计算机;红外发射仪。
学具准备:机器人套件,零件分类摆好。
知识准备:两周机器人专项学习
二、组织比赛:
宣读规则:
每个机器人都有三次比赛机会。用比赛中成绩最好的两次来确定胜利者。在比赛中,机器人每完成一步基本动作可得到相应的基本分,并根据具体时间和碰撞墙壁资料进行加、扣分。
分组抽签:
第一次:采用抽签方式
第二次:指定与第一次不同的房间(第一次抽3号,第二次指定1号;第
一次抽1号,第二次指定3号;第一次抽2号,第二次指定2号)。
第三次:经过两次比赛后,如果队员对成绩不满,可以申请再次进行比赛。指定与前两次不同的房间。比赛成绩将替代前两次成绩中的一次,且最后成绩将按所得最好成绩的70%记分。
编制调试机器人程序:
强调小组成员分工协作。在活动中每一个学生的观察分析、动手、创造能力,每一个成员的参与、竞争、实践、协作意识都可进入评分加分。
按抽签顺序进行比赛评分
三、宣布成绩
四、比赛总结
1、优秀作品展示,设计者说明思路。
2、本课收获、体会,写留言。
表现突出,创造性强的学生总结后表扬发奖。
3、收拾活动场地,清点摆放活动材料,养成好习惯。