外轴参数调整
一、ABB机器人对外轴的控制参数的调整的基本步骤
●完成外轴的硬件安装,如电机的安装,SMB盒的安装等;
●向机器人控制器内加载外轴的临时参数文件;
●对加载的临时参数进行修改和配置,保证机器人此时能够控制
电机的转动;
●如果客户需要对电机有额外的设置,如抱匝、使能和里控制等,
需要额外的配置和设置;
●等所有的参数设置都完成后开始电机参数的调整。
二、配置外轴参数
2.1加载参数
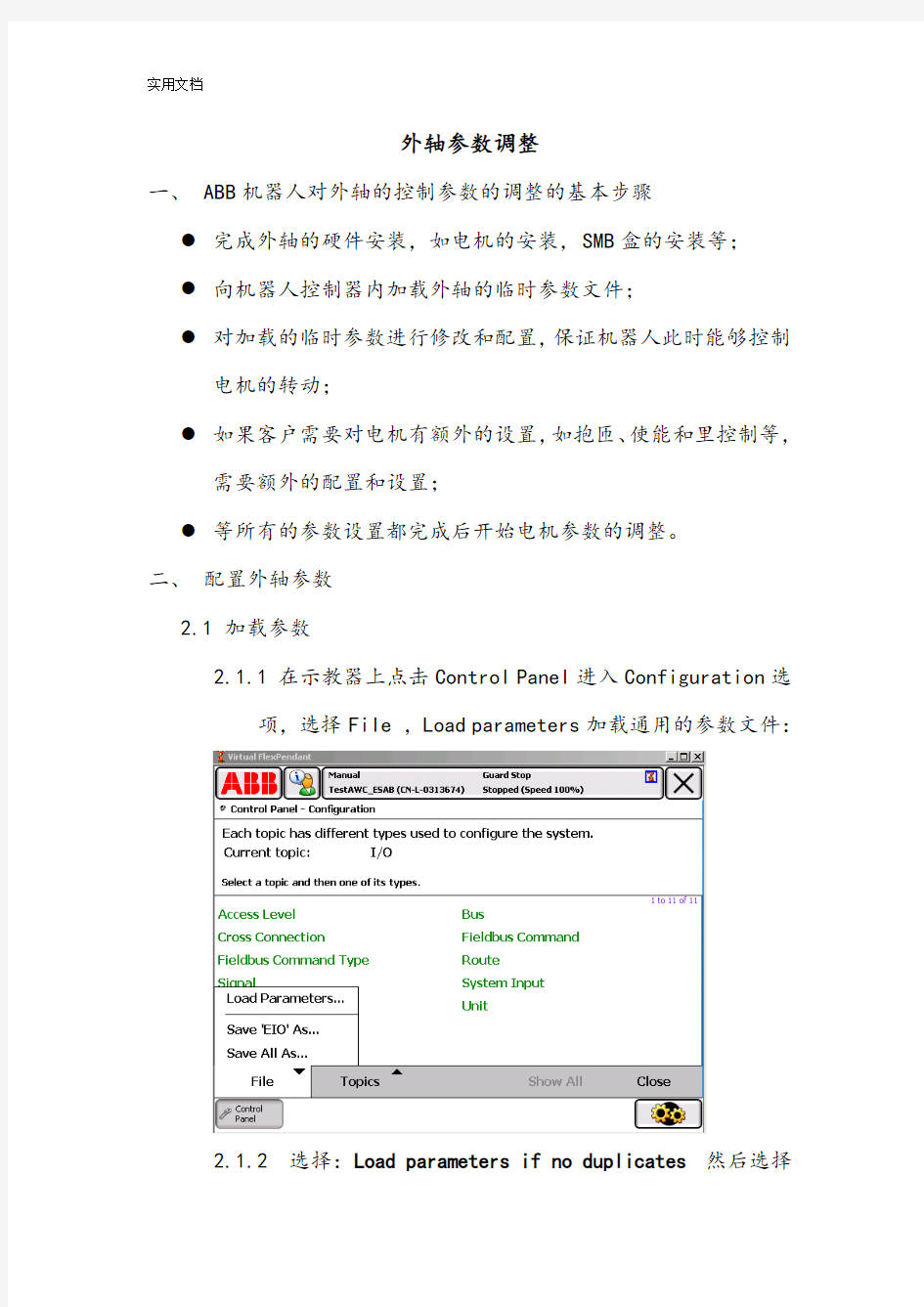
2.1.1在示教器上点击Control Panel进入Configuration选
项,选择File ,Load parameters加载通用的参数文件:
2.1.2选择:Load parameters if no duplicates 然后选择
如下路径加载参数:Mediapool\RobotWare_5.XX.XXXX
\utility\ Additional Axis\DM1\General,然后选择相
应的文件加载;
2.1.3重启系统。
2.2配置参数
2.2.1在Motion中选择Mechanical Unit并且定义如下参数
●Name
●Standby State: Yes/No
●Activate at Start Up
●Deactivation Forbidden
●Use Single 1
2.2.2在Motion中选择Single定义Single;
●Name
●Single
2.2.3在Motion中选择Single Type定义外轴的种类;
有以下几种选项可以选择:
TRACK; FREE_ROT; EXT_POS; TOOL_ROT;
2.2.4在Motion中选择Joints,为外轴指定外轴的序号;
如:第10个轴对应与robtarget中的eax_d
2.2.5在Motion中选择Arm,定义外轴的运动范围;
●Upper Joint Bound;
●Lower Joint Bound;
2.2.6在Motion中选择Accelerarion Data,定义外轴加速和
减速运动参数;
●Nominal Acceleration;
●Nominal Deceleation;
2.2.7在Motion中选择Transmission,定义外轴与传动比相
关的参数;(这些参数与减速机相关)
●Transmission Gear Ratio;
●Rotating Move
●Transmission High Gear
●Transmission Low Gear
2.2.8在Motion中选择Motor Type,定义下面的参数;(这
些参数有电机供应厂商提供)
●Pole paris
●Ke Phase to phase (Vs/Rad)
●Max current (A)
●Phase resistance(ohm)
●Phase inductance(H)
2.2.9在Motion中选择Motor Calibration,定义下面的参
数;
●Calibration offset;通过Fine calibration获得;
●Commutator offset:电机供应商提供;
2.2.10在Motion中选择Stress Duty Cycle,定义最大扭
矩和最快转速;
●Torque Absolute Max;
●Speed Absolute Max;
Note:如果Torque Absolute Max太大会造成配置错误,因此通常定义如下:
Torque Absolute Max < 1.732 ×Ke Phase to Phase×Max Current;
通过计算出的值适当的减小(5~10);
2.2.11重启系统;
三、参数调整
3.1.检测电机的连接正确性
这段主要讲述应用ABB标准的程序Commutation来验证电机参数是否配置合理,主要验证以下几项功能:
●寻找同步永磁电机的Commutation的值;
●检查电机的相序是否正确;
●检查电机的电机对是否设置正确;
●检查Resolver的连接是否良好。
3.1.1在Motion中选择Drive system,将Current_vector_on设
置为TRUE,然后重新启动系统,并且运行程序
Commutation;
Debug → Call Service Routine → Commutation。
3.1.2检查电机的相序连接是否正确;通过示校器控制电机的相正
方向旋转,从安装杆看相电机,如果旋转方想为顺时针方
向,则电机的相序连接正确,如下图所示:
如果电机旋转方向不正确,则可以通过改变接线方式来纠正:如将RST改为SRT,RTS,TSR等。
3.1.3检测电机的电极对,单步执行Commutaion程序,则每执行
一步电机会旋转1/16圈。
3.1.4检测Resolver的连接,单步执行Commutation程序,如果
Resolver连接正确,电机转动的角度会增加。
3.2.调整Commutaion的值
需要准备一个24V的直流电源和继电器。
ABB的标准电机的Commutation offset值都为1.5708。
●禁止电机(Deactivate the motor);
●关闭Controller;
●将电机的电源线拔开;
●将电机和齿轮箱分离(主要是为了防止电机受齿轮箱摩擦力的
干扰);
●在电机的松匝信号两端接上开关信号,保证随时可以使电机松
匝;
●先将电机松匝,将另一组24V的电源的正极接到S级(V级),
将0V接到T级(W级)。
注意:不要直接将电源的正负级接到线圈上去,需要24V和0V之间串连一个继电器的线圈,以保证不烧毁电源。
接上电源后,断开电源,此时电机已经回到正确的Commutation 位置,如果在接上电源,电机应该不会再转动。
●将电机的松匝信号解开,电机抱匝;
●将电机再次连接到机器人控制器上,重新启动系统,不要转动
任何机械部件;
●打开Test Signal Viewer,Mechanical unit 选择
Resolver_angle,观看Resolver_angle的值,将正确的值输
入Commutation offset中。
3.3.按照下图设置Test signal Viewer
设置:speed 和 torque_ref
注意:具体的Test signal Viewer操作参看手册ABBTest Signal Viewer 1.3.pdf;
3.4.初步调整Kv,Kp,Ti;
3.4.1 调整Kv(方法一)
●将Lag control master 0 中的参数 FFW Mode 设置为No;
●将Kp设置为5(记录Kp的初始值);将Ti设置为10(记录
Ti的初始值),重启系统让新的参数生效;
●按照下列程序逐步增加Kv的值,增幅为10%,观看Test
signal viewer中的Torque_ref信号,当电机出现不稳定,
即电机有明显的振动和声音,停止运行程序。
MODULE Kv_tune
PROC main()
VAR num i;
VAR num per_Kv;
VAR num Kv;
TuneReset;
FOR i FROM 0 TO 40 DO
per_Kv:=100+10*i;
Kv:=1*per_Kv/100;
TPErase;
TPWrite "per_Kv = "\Num:=per_Kv;
TPWrite "Kv = "\Num:=Kv;
TuneServo STN1,1,100\Type:=TUNE_KP;
TuneServo STN1,1,100\Type:=TUNE_TI;
TuneServo STN1,1,per_Kv\Type:=TUNE_KV;
MoveJ p1,v1000,z50,tool0;
MoveJ p2,v500,z50,tool0;
MoveJ p1,v1000,z50,tool0;
WaitTime 1;
ENDFOR
ENDPROC
ENDMODULE
通过Test signal Viewer可以十分清楚的看见电机的不稳定的状况:
●记录此时的Kv的值,将Kv/2的值输入到系统参数中,重新启
动系统。
调整Kv方法二:
采用ABB提供的标准的外轴调整软件,tune master进行参数调整,如下图所示,当电机的速度出现明显的抖动,然后将此Kv值除以2
Kv值越大变位机的速度响应越快,但是过快容易造成电机的不稳定和抖动,通常Kv=0.6~1.5之间。
3.4.2 调整Kp(方法一)
●保持刚调整玩的Kv值不变,将Kp值改回到原来的初始值,依
然保证Ti为10;
●按10%的比例逐步增加Kp的值,观察Test signal viewer
中的Torque_ref信号,直到见到Test signal viewer中的
Overshot现象为止;
MODULE kp_tune
PROC main()
VAR num i;
VAR num per_Kp;
VAR num Kp;
TuneReset;
FOR i FROM 0 TO 20 DO
per_Kp:=100+10*i;
Kp:=5*per_Kp/100;
TPErase;
TPWrite "per_Kp = "\Num:=per_Kp;
TPWrite "Kp = "\Num:=Kp;
TuneServo STN1,1,100\Type:=TUNE_KV;
TuneServo STN1,1,100\Type:=TUNE_TI;
TuneServo STN1,1,per_Kp\Type:=TUNE_KP;
MoveJ p1,v1000,z50,tool0;
MoveJ p2,v500,z50,tool0;
MoveJ p1,v1000,z50,tool0;
WaitTime 1;
ENDFOR
ENDPROC
ENDMODULE
将Kp减1,即Kp=Kp-1,将所得的值输入到系统中,重启系统;
调整Kp(方法二)
采用ABB提供的标准的外轴调整软件,tune master进行参数调整,如下图所示:
保证绿线尽量的接近红线,但是不要出现过冲现象,如果没有出现明显的过冲现象,则参看力矩曲线(蓝线所示),如果蓝线出现明显的振荡曲线,则表示此时参数已经合适。
上诉两种方法区别:
第一种方法采用精度高,调试效率低;第二种方法,精度低,调试效率高。通常情况下Kp值越大,电机的定位精度越高,但是过大时容易造成电机的振动,对电机损伤大,对于大负载的变位机,通常Kp为20左右,对于小负载的变位机,Kp通常为35左右,具体调整大小视情况而定。
3.4.3 调整Ti(方法一)
●保持刚调整完毕的Kv和Kp值不变,将Ti设置为1;
●将Ti的值按10%的步长递减,观察Test signal viewer的
Torque-ref,直到见到overshot为止。
MODULE ti_tune
PROC main()
VAR num i;
VAR num per_Ti;
VAR num Ti;
TuneReset;
FOR i FROM 0 TO 10 DO
per_Ti:=100-10*i;
Ti:=1*per_Ti/100;
TPErase;
TPWrite "per_Ti = "\Num:=per_Ti;
TPWrite "Ti = "\Num:=Ti;
TuneServo STN1,1,200\Type:=TUNE_KV;
TuneServo STN1,1,250\Type:=TUNE_KP;
TuneServo STN1,1,per_Ti\Type:=TUNE_TI;
MoveJ p1,v1000,z50,tool0;
MoveJ p2,v500,z50,tool0;
MoveJ p1,v1000,z50,tool0;
WaitTime 1;
ENDFOR
ENDPROC
ENDMODULE
记录此时的Ti值,将Ti值增加5~10%,即Ti=Ti(1+5%),将此值输入到系统中,重新启动系统;
调整Ti方法二:
Ti值通常为越小变位机速度响应越快,但是越小越容易造成电机抖动,Ti通常为0.1.
3.5.设置Inertia(Specifying the inertial)
当变位机上的负载过大时或者偏心比较严重时,需要调整变位机的惯量,这样可以保证变位机的稳定性和精度,如下图所示,采用Tune master调整变位机的惯量:
3.6.调整Bandwidth(Tuning Bandwidth)
3.7.T uning of Resonance frequency
3.8.调整Acceleration和Deceleration
●Acceleration 和 Deceleration 两个参数都是属于Motion
中的Acceleration Data
●运用TSV(Test Signal Viewer)去监控正负Torque_limit 和
Torque_ref的值,然后以0.5的步长增加Acceleration的值,在TSV中观察Torque_ref是否向Torque_limit靠近,当值增
加到一定程度后Torque_ref已经非常接近Torque_limit(即
如果再增加Acceleration的值就会导致Torque_ref和
Torque_limit进行交叉),记录此时的Acceleration的值,
然后将其减少10%,将此值作为标准的Acceleration的值。
●注意Deceleration和Acceleration的方法一样,不同之处在
于Acceleration是让Torque_ref向positive Torque_limit
靠近,而Deceleration是让Torque_ref向negative Torque_limit靠近.
如下图所示:
正确的Acc参数:
Acc的值太高:
Acc的值太低:
3.9.最终调整Kp、Kv和Ti
如果在装上夹具和工件后,发现变位机的参数并不完全合适,因此需要根据实际情况重新调整变位机的Kp,Kv和Ti参数,以保证变位机运动的稳定性,调试方法和上述相同。
具体调试步骤见:Tune master帮助说明手册。
附件1:
ABB机器人对外轴电机的控制方式:
ABB机器人控制柜分为高压控制柜和低压控制柜:
低压控制柜主要控制:IRB140,IRB1410,IRB1600,IRB2400,IRB4400等小型号的机器人;
高压控制柜主要控制:IRB4600,IRB6640,IRB7600,IRB6620等大型号的机器人;
高压控制柜和低压控制柜的主要区别在于:低压控制柜外轴驱动器输出的电压等级为198~430V之间,额定输出为234V;高压控制柜外轴驱动的电压等级为:377~790V之间,额定输出为400V。
因此对于ABB的标准变位机,如MTC,IRBP R, IRBP K等变位机他们采用的电机都是200V电压等级的,因此他们只能适合于低压控制柜。如果大型机器人想要控制变位机必须进行额外配置一个低压控制柜,通常采用4400的控制柜作为低压控制柜。
对于我们设计的LCP 500K这种型号的变位机,采用的电机是高压低压兼容的电机,他的额定电压为400V,因此这种电机既适用于高压控制柜,也适用于低压控制柜。
注意(哪种型号的电机能够与ABB电机进行同步):
(1)电压等级为400V AC的交流伺服永磁电机;
(2)必须是星型连接方式(Y,Star connection);
(3)电机的反馈必须是Resolver形势的,下面几种型号是经过ABB认可的可以与ABB兼容的resolver型号:
通常我们选择Tamagawa的Resolver
附件2:
ABB SMB板的描述:
上图所示为ABB标准SMB版,它主要起监控外轴电机转角的作用,一个SMB版可以同时监控7个外轴的转动角度。
节点E:SMB上的标号为X1,为9针(D-SUB 9 pin)的接头,用于
SMB和IRC5 Controller的Axis computer(A42-X5 )进行轴数据通讯。
B:SMB上的标号为X2,为25针的接头(D-sub 25 pin),用于和外部轴通讯,其节点为1~4号,控制外轴的1~4轴。
D:SMB上的标号为X3,是电池的接头。
A:SMB上的标号为X4,为15孔的接头 (D-sub 15 socket),用于和外部轴通讯,其节点为1和7,控制外轴的1轴和7轴。
C:SMB上的标号为X5,为25孔接头(D-sub 15 socket),用于和外部轴通讯,其节点为3~6,用于控制外部轴的3~6轴。
注:从上述的文字中可以看出A、B和C的信号节点有重叠部分,其中A和B轴为1轴重叠,B和C为3、4轴重叠。由于1个SMB可以控制7个外轴的轴信号,A主要用来控制第1轴和第7轴,B可以控制1~4轴,C可以控制3~6轴。因此当A引进接上1轴的信号线,则B不能接1轴的信号线,同时当B轴接了3和4轴的控制线,则C 不能再接3和4轴的信号线,如果重复接线会造成接线的混乱,而引起系统错误。
(对对于机器人系统通常采用B控制1~3轴,C控制控制4~6轴,
于4轴机器人除外)。
对于K/R型变位机通常采用B控制来控制外轴,其中1控制Interchange,2控制Station1,3控制station2。
对于L型变位机和MTC也采用B来控制,其中1为Station1,其它的依次扩展。