
第8章 刚体平面运动概述和运动分解
一、是非题(正确的在括号内打“√”、错误的打“×”)
1.平面图形的角速度与图形绕基点转动的角速度始终相等。 ( √ ) 2.刚体平面运动可视为随同基点的平动和绕基点转动的合成运动。 ( √ ) 3.平面图形上如已知某瞬时两点的速度为零,则此平面图形的瞬时角速度和瞬时角加速度一定为零。 ( × ) 4.在某一瞬时平面图形上各点的速度大小都相等,方向都相同,则此平面图形一定作平动,因此各点的加速度也相等。 ( × ) 5.车轮沿直线轨道滚而不滑,某瞬时车轮与轨道的接触点为车轮的速度瞬心,其速度为零,故速度瞬心的加速度亦为零。 ( × ) 6.当0=ω时,平面图形上两点的加速度在此两点连线上的投影相等。 ( √ ) 7.平面图形在其平面内运动,某瞬时其上有两点的加速度矢相同,其上各点速度在该瞬时一定相等。 ( √ ) 二、填空题
1.刚体在运动过程中,其上任一点到某一固定平面的距离保持不变,这种运动称为刚体的 平面运动。刚体的平面运动可简化为平面图形在其自身平面内的运动。
2.平面图形的运动可分解为随基点的平动和绕基点的转动。平动为牵连运动,它与基点的选择有关;转动为相对运动,它与基点的选择无关。
3.通常把平面运动的角速度和角加速度直接称为刚体的角速度和角加速度,而无须指明它们是对哪个基点而言。
4.平面图形上各点的加速度的方向都指向同一点,则此瞬时平面图形的角加速度等于零。 5.相对某固定平面作平面运动的刚体,则刚体上与此固定平面垂直的直线都作平动。 三、选择题
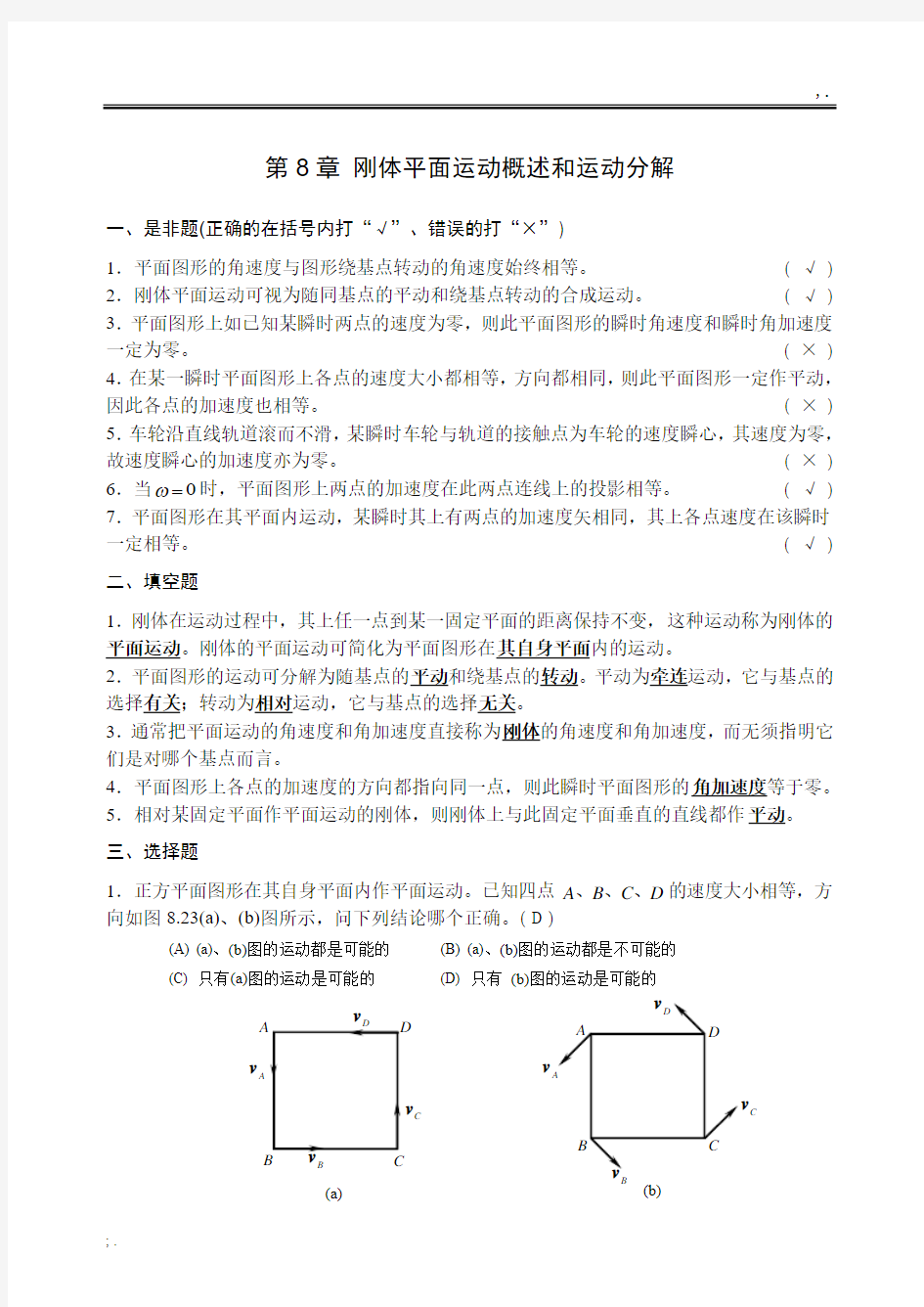
1.正方平面图形在其自身平面内作平面运动。已知四点A 、B 、C 、D 的速度大小相等,方向如图8.23(a)、(b)图所示,问下列结论哪个正确。( D )
(A) (a)、(b)图的运动都是可能的 (B) (a)、(b)图的运动都是不可能的 (C) 只有(a)图的运动是可能的
(D) 只有 (b)图的运动是可能的
C v
A
D
B
C
A v
B v
C v
D v
(a)
A
D
B
C
A v
B v
D v
(b)
图8.23
2.如图8.24所示圆盘在水平面上无滑动地滚动,角速度ω为常数,轮心点A 的加速度为( A ),轮边点B 的加速度为( B ),轮与地面接触点C 的加速度为( B )。
(A) 0 (B)
2r ω (C) 22r ω (D) 24r ω
图8.24
3.如图8.25所示,哪个动点在做加速运动?( B )
(A)
(B)
(C)
图8.25
4.如图8.26所示平面图形上两点A 、B 的加速度大小相等,方向相同,但不共线。试问此瞬时平面图形的角速度和角加速度哪一个为零?( D )
(A)
0=ω, 0≠ε (B) 0≠ω, 0=ε (C) 0≠ω, 0≠ε (D) 0=ω, 0=ε
5.杆AB 做平面运动,图示瞬时两点A ,B 速度A v ,B v 的大小,方向均为已知,C 、D 两点分别是A v ,B v 的矢端,如图8.27所示。则杆AB 上各点的速度矢的端点是否都在直线CD 上?( C )
(A) 全部都在直线CD 上 (B) 只有部分在直线CD 上 (C) 全部都不在直线CD 上 (D) 无法确定
图8.26 图8.27
6.四连杆机构中已知基点A 的加速度A a ,杆AB 角速度ω和角加速度ε,欲求点B 的加速度,画出加速度矢量图如图8.28所示。将基点法求加速度的公式投影于x ,y 轴,则有( C )。
(A) -n cos 0BA B a a θ+= ,sin 0BA A B a a a θτ
--=
(B) -n cos BA B a a θ= ,sin 0BA A B a a a θτ
--= (C) -n
cos BA B a a θ= ,sin BA A B a a a θτ
-=- (D) -n
cos 0BA B a a θ+= ,sin BA A B a a a θτ
-=
图8.28
7.如图8.29所示机构中做平面运动的构件在图示位置的速度瞬心是( C )
。
(A) 点O
(B) 点A
(C) 点B
(D) 无穷远点
图8.29
8.一刚体做瞬时平动,此瞬时该刚体上各点( B )。
(A) 速度和加速度均相同 (B) 速度相同而加速度不相同 (C) 速度和加速度都不相同
(D) 速度不同和加速度可能相同
四、计算题
8-1 如图8.30所示的两齿条以1v 和2v 同方向运动。在两齿条间夹一齿轮,其半径为r ,求齿轮的角速度及其中心O 的速度。
解:齿轮作平面运动,以B 为基点,分析A 点的速度。由AB B A v v v +=作A 点的速度合成图如图所示。由图可知
21v v v v v B A AB -=-= 齿轮的角速度为
r
v v AB v AB O 22
1-=
=ω 再以B 为基点,分析O 点的速度。由OB B O v v v +=作O 点的速度合成图如图所示。由图可知齿轮中心O 的速度
2
2
12v v r v v v v O OB B O +=
+=+=ω
8-2 曲柄OA = 17cm ,绕定轴O 转动的角速度1rad s OA /ω=,已知AB = 12cm ,BD = 44cm ,BC = 15cm ,滑块C 、D 分别沿着铅垂与水平滑道运动,如图8.31所示瞬时OA 铅垂,求滑块C 与D 的速度。
图8.30 图8.31
解:由A v 和D v 的速度方向,可知杆BD 作瞬时平动。从而可知B v 方向水平向左。C 点的速度方向垂直向下。BD 作瞬时平动,可知滑块D 的速度为 )/(17171s cm OA v v OA A D =?=?==ω 杆BC 作平面运动,上速度投影定理,有
)90cos(cos o ??-=C B v v 根据图示的结构,经过数学计算,可知6778.040
15
7cos ==?,7352.0sin =?,代入上式,可得
)/(6.15sin cos sin cos s cm v v v A B C ===
?
?
?? 8-3 曲柄OA 绕定轴O 转动的角速度25rad s OA ./ω=,OA = 28cm ,AB = 75cm ,BC =
15cm ,r = 10cm ,轮子沿水平面滚动而不滑动。求图8.32所示瞬时轮子上点C 的速度。
解:图示结构中杆AB 和轮子作平面运动。A 、B 和C 点的速度方向如图所示。首先由A 点速度计算B 点的速度。杆AB 作平面运动,由速度投影定理,有 βαcos cos B A v v =
根据OAB ?,有βsin 120sin o
OA AB =,解得o
86.18=β,o o o 86.48)60(90=--=βα。代入上式,解得
s cm OA v v OA A B /67.4886.18cos 86.48cos 285.2cos cos cos cos o
o =?=?==
βαωβα 轮子沿水平面滚动而不滑动,故P 点为其速度瞬心,轮子上点C 的速度为 s cm PC r v PC v B B B /7.87151010
67
.4822=+?=?=?=ω
8-4 在瓦特行星传动机构中,平衡杆O 1A 绕O 1轴转动,并借连杆AB 带动曲柄OB ,
而曲柄OB 活动地装置在O 轴上,如图8.33所示。在O 轴上装有齿轮I ,齿轮II 的轴安装在连杆AB
的另一端。已知:12r r ==,175cm O A =,150cm AB =,杆O 1A 的角速度16rad s O /ω=。求当60α=?、90β=?时,OB 和齿轮I 的角速度。
8.32 图8.33
解:图示结构中连杆AB 作平面运动。由A v 和B v 的速度方向可知连杆AB 的速度瞬心为点P 。由于齿轮II 和连杆A 固接,可知齿轮II 上C 点的速度为C v ,如图所示。连杆AB 的角速度为
s r a d PA A O PA v O A AB /5.1300
75
611=?=?==
ωω 连杆AB 端点B 和齿轮II 上C 点的速度分别为
)/(322531505.1s cm PB v AB B =?=?=ω
)/(3180)3303150(5.1s cm PC v AB C =-?=?=ω OB 和齿轮I 的角速度分别为 )/(75.33
603
225s rad OB v B OB ===
ω )/(63
303
180s rad OC v C I ===
ω 8-5 图8.34所示曲柄OA 以角速度ω= 6rad/s 转动,带动平板ABC 和摇杆BD ,已知: OA = 100mm ,AC = 150mm ,BC = 450mm ,BD = 400mm ,∠ACB = 90?。设某瞬时OA ⊥AC ,OA ⊥BD ,求此时点A 、B 、C 的速度以及平板ABC 和摇杆BD 的角速度。 解:平板ABC 作平动,由A v 和B v 方向可知P 点为
为平板ABC 的速度瞬心。A 点速度A
v 为
)/(6001006s mm OA v A =?=?=ω 平板ABC 的角速度为
s rad PA OA PA v A ABC /3
4
4501006=?=?==ωω
B 点速度B v 为
)/(2001503
4
s mm PB v ABC B =?=?=ω
C 点速度C v 为
图
8.34
B
)/(102004501503
4
22s mm PC v ABC C =+?=?=ω 摇杆BD 的角速度为
s rad BD v B BD /5.0400
200
===
ω 8-6 轮子O 以匀角速度0ω= 2rad/s 转动,在图8.35所示瞬时,OA 铅垂,BC 水平。求
此瞬时杆AB 与杆BC 的角速度和角加速度。
A
图8.35
解:先分析速度。杆AB 作平面运动,由A v 和B v 的方向可知杆AB 的速度瞬心为点O 。故杆AB 的角速度为
s rad OA
OA OA v A AB /20
=?==
ωω 转向为逆时钟方向。点B 的速度为
s mm OB v AB B /2001002=?=?=ω 杆BC 的角速度为
s rad BC v B BC /67.630
200
===
ω 转向为顺时钟方向。
再分析加速度。杆AB 作平面运动,以点A 为基点,分析点B 的加速度。由=+τB n
B a a
τBA n
BA n A a a a ++作B 的加速度合成图。列投影方程
n B a 方向:??τsin cos BA n
BA n B a a a --=
其中:222
/3.133330200s cm BC v a B n B
=== ,2222
/6.417100304s cm AB a AB n BA =+?=?=ω,
2873.01003030sin 22=+=?,9578.0100
30100
cos 22=+=?。代入上式,可得
2/60332873
.03.13339578.06.417sin cos s cm a a a n B n BA BA -=-?-=--=??τ
杆AB 的角加速度为 22
2/8.57100306033
s rad AB a BA AB
-=+-==τε 转向为顺时钟转向。
n
BA a 方向:n BA n A B n B a a a a +-=--???τsin sin cos
其中:2
20/120304s cm OA a n A =?=?=ω,代入上式,有
2/5.5778sin sin cos s cm a a a a n
BA
n A n B B -=-+-=?
??τ
杆BC 的角加速度为 2/6.19230
5.5778s rad BC a B BC
-=-==τε 转向为逆时钟方向。
8-7 半径为r 的圆柱形滚子沿半径为R 的圆弧槽纯滚动。在图8.36所示瞬时,滚子
中心C 的速度为C v ,切向加速度为C τ
a 。求这时接触点A 和同一直径上最高点B 的加速度。
解:圆柱形滚子沿半径为R 的圆弧槽纯滚动,是平面运动。以点C 为基点,分别分析
点A 和B 的加速度。由于C 点的运动轨迹是圆周,故C 点的加速度有切向加速度为C τ
a 和
法向加速度n C a 。由ττAC n AC C n C Ay Ax a a a a a a +++=+作A 点的加速度合成图。列投影方程,
有
0=-=-=ετ
ττr a a a a C AC C Ax
r
r R Rv r v r r R v r r R v a a a C C C C n AC
n
C
Ay )()(22222-=?+-=+-=+
=
ω 由τ
τBC n BC C n C By Bx a a a a a a +++=+作A 点的加速度合成图。列投影方程,有
τ
τττεC C BC C Bx a r a a a a 2=+=+=
r
r R v r R r v r r R v r r R v a a a C C C C n BC
n
C
By )()2()(22222---=?--=--=-
=
ω 8-8 图8.37所示机构中,曲柄OA 以等角速度0ω绕O 轴转动,且OA = O 1B = r ,在图示位置时∠AOO 1= 90?,∠BAO = ∠BO 1O = 45?,求此时点B 加速度和O 1B 杆的角加速度。
解:在图示机构运动的过程中,连杆AB 作平面运动。为了计算点B 加速度和O 1B 杆的角加速度,必须先进行速度分析。以A 为基点分析B 点的速度,由BA A B v v v +=作B 点的速度合成图。由图可知
02
222ωr v v v A BA B ==
=
图8.36
再以A 为基点分析B 点的加速度,由ττBA n BA n A B n B a a a a a ++=+作B 点的加速度合成图。
列投影方程:
τB a 方向:n
BA n A B a a a -=o 45cos τ 其中:201221ωr B O v a B n B
==,20ωr a n A =,2
022
12ωr AB
v a BA n BA -==,代入上式,可得B 点的切向加速度
2
02
1ωτr a B = B 点的加速度
2
222
2)()(ωτr a a a B n B B =
+= O 1B 杆的角加速度为
2012
11ωετ==B O a B B
O
A
图8.37
8-9 在图8.38所示机构中,曲柄r OA =,绕O 轴以等角速度0ω转动,r AB 6=,r BC 33=。求图示位置滑块C 的速度和加速度。
8-10 平面机构的曲柄OA 长为l 2,以匀角速度0ω绕O 轴转动。在图8.39所示位置时,
图8.38