基于模板匹配算法的字符识别系统研究与实现_毕业论文
- 格式:doc
- 大小:613.00 KB
- 文档页数:46
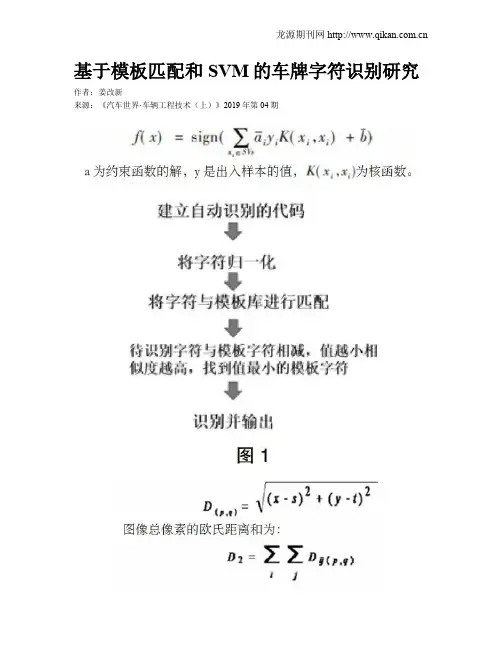
基于模板匹配和SVM的车牌字符识别研究作者:姜改新来源:《汽车世界·车辆工程技术(上)》2019年第04期摘要:对于车牌识别过程中的字符识别问题,提出了基于模板匹配和SVM(支持向量机)的方法,这两种方法各自有自己的特点,识别率都比较高。
本文给出了这两种方法的性能比较,可以在具有不同需求的情况下采用不同算法。
关键词:模板匹配;SVM;字符识别;性能对比1 引言随着生活水平的提高的汽车行业的发展,家用汽车和其他类型的汽车越来越多,在很多方面造成了监管不便的问题。
汽车的车牌号就犹如人的身份证件号一样是汽车唯一的身份识别信息,在交通系统,住宅小区,事业单位和学校等等许多地方为了信息监测和安全防范都需要检验汽车的身份信息,单单靠人工的方式识别显然十分困难,车牌识别系统的出现在一定程度上为汽车信息识别提供了很大的便利,应用市场也十分广泛。
车牌识别系统的流程一般是首先进行车牌图像的获取,然后对图像进行预处理,而车牌定位、车牌字符分割和字符识别这几个部是比较核心的步骤,本文对字符识别这一部分提供了模板匹配和支持向量机这两种算法,给出了特点的介绍和性能的比较。
2 支持向量机支持向量机方法的基本模型是定义在特征空间上的间隔最大线性分类器,学习的目标是在特征空间中找到一个分类超平面,能够将实例分到不同的类。
分类特征要求分类内部样本距离足够小,类间样本距离足够大。
根据以上原理构造的SVM判别函数为:a为约束函数的解,y是出入样本的值,为核函数。
步骤:(1)对测试样本进行预处理,使其便于获得特征;(2)再对字符图像求其特征参数;(3)根据SVM方法进行判別。
SVM着重于最小化训练集的结构误差,识别效率高,识别速度快,测试误差小,而且还具有较强的泛化能力,但是SVM是基于小样本统计理论的基础上的,对于数据量很大的训练样本,SVM的训练时间比较长。
3 模板匹配算法我国普通汽车车牌的字符共有七位,第一位是各省或者直辖市的汉字简称,然后第二位是A~Z的字母,后五位是数字和字母的混合搭配,由于字符特征差距较大,采用不同的模板分别识别,提高了效率和准确性。
合肥学院毕业设计(论文)设计(论文)题目基于模板匹配算法的字符识别系统研究与实现院系名称计算机科学与技术系专业(班级)计算机科学与技术姓名(学号)指导教师系负责人摘要自从计算机问世以来,让机器具有模式识别能力一直是计算机科学家们的努力方向。
研究表明,对视觉和听觉信息的处理过程,不仅仅是一个感知过程,也是一个认知过程。
因此,研究模式识别,是理解人类智能的本质的重要途径。
字符识别是一个传统和典型的模式识别问题,脱机手写数字识别是一个典型的大类别的模式识别问题。
手写体数字具有不同字符字型相差不大、相同字符有多种不同写法、数字没有上下文关系等等特点,使得脱机手写体数字识别成为识别领域最大的难题和最终的目标。
在这种大类别识别的研究中,传统上大多采用模板匹配的方法来解决问题。
而在模板匹配算法中,得计算其特征值。
图像需要经过二值化,细化等预处理。
关键字模板匹配;特征值;细化;二值化ABSTRACTSince computer appeared, it has been an effort direction for scientist to let the computer has the ability of pattern recognition. Researching indicates that the procedure to deal with seeing and hearing not only a procedure of perception but also cognition. Therefore, studying pattern recognition is an important way in understanding the mankind’s intelligence and ability. Character recognition is a traditional and typical pattern recognition problem, and Handwritten Numeral Recognition is a typical large vocabulary pattern recognition problem. Different characters do not vary much, the same character can be written in many ways, there is no context between characters, and so on. Because of so many characteristics, Handwritten Numeral Recognition is a very difficult problem and commonly regarded as one of the ultimate goals of character recognition research. And the template matching algorithm, in its calculation of eigenvalues. Image require two value, thinning and other pretreatment.引言手写数字识别(Handwritten Numeral Recognition)是光学字符识别技术(Optical Character Recognition,简称OCR)的一个分支,它研究的对象是:如何利用电子计算机自动辨认人手写在纸上的阿拉伯数字。
基于改进的模板匹配识别算法的研究摘要:车牌识别系统是智能交通系统的核心组成部分,在交通部门的违章检测、高速公路自动收费和智能停车场管理等方面占有重要的作用。
车牌字符识别问题是车牌识别的关键技术之一,也是目前该领域研究的热点问题之一。
本文通过对两种模板匹配的车牌字符识别方法进行了比较与研究。
关键词:车牌识别模板匹配汉字识别1.引言车辆牌照识别(LPR)系统作为一个综合的计算机视觉系统主要分为车流量、车型检测子系统和车辆牌照识别子系统两部分,而车牌字符识别是系统的核心。
车辆牌照识别子系统又可分为车牌定位、车牌字符识别两部分。
LPR系统主要需要进行的是图像的实时采集、处理、分析和识别,属于图像工程的范畴。
现代社会已进入信息时代,随着计算机技术、通信技术和计算机网络技术的发展,自动化的信息处理能力和水平不断提高,并在人们社会活动和生活的各个领域得到广泛应用,在这种情况下,作为信息来源的自动检测、图像识别技术越来越受到人们的重视。
2.两种模板匹配法2.1 传统模板匹配法识别传统模板匹配法是实现离散输入模式分类的有效途径之一,其实质是通过度量输人模式与模板之间的相似性,取相似性最大的作为输人模式所属类别。
该方法通过对字符的直观形象进行特征抽取,使用相关匹配原理确定的匹配函数进行判决,也就是通过一个分类器将输入的字符与标准模板字符进行匹配。
2.2 改进的模板匹配法识别传统模板匹配方法的缺点是抗干扰能力差。
模板匹配法根据建模时所取特征的不同,分为图形匹配、笔画分析、几何特征抽取等几种形式。
图形匹配法在建模和匹配比较时,都是基于字符的图形块本身进行匹配,并根据其相似程度得出识别结果,本文采用了该方法对汉字进行识别。
通过图形匹配的方法识别汉字字符的时,首先,要对输入的汉字字符进行二值化和归一化处理,若背景用0表示,汉字字符用1表示,对每一个汉字字符均建立一个标准的模板Ti,令待识别的图像为Y,它们的大小均为A×B,将Y与每一个模板进行匹配,分别求出它们的相似度Si:其中,Ti和Y均为像素的二值点阵,Y×Ti表示矩阵和矩阵的点乘,即矩阵中对应位置元素的相乘。
1. 文字识别的模板匹配技术简介文字识别(OCR)的模板匹配技术是一种常见的文字识别方法。
它通过比对图像中的文字与预先设定的模板进行匹配,来实现对文字的识别和提取。
这种技术通常应用于印刷体文字的识别,具有较高的精度和稳定性。
2. 模板匹配技术的原理模板匹配技术的原理是通过将待识别的文字图像与预先制作的模板进行逐像素比对,找到最相似的部分,从而确定文字的位置和内容。
这种方法要求模板和待识别图像之间的尺寸和角度要尽量一致,同时还需要考虑光照和噪声等因素对匹配的影响。
3. 模板匹配技术的优势和局限模板匹配技术的优势在于对文字的准确度较高,尤其是对于规整的印刷体文字。
然而,它也存在一定的局限性,例如对于手写文字、变形文字或者不规则排列的文字识别准确度较低,还容易受噪声和光照变化的影响。
4. 模板匹配技术的应用领域模板匹配技术在诸如银行卡识别、车牌识别、文件扫描和图书数字化等领域得到广泛应用。
它能够快速准确地提取出文字信息,并且可以通过优化算法和硬件设备来提高识别速度和稳定性。
5. 个人观点与展望对于一些特定场景下的印刷体文字识别任务,模板匹配技术仍然是一种有效的方法。
但随着深度学习和神经网络等技术的发展,基于特征的文字识别方法可能会逐渐被深度学习模型所取代,这些模型能够更好地处理复杂的字体、排版和语言等问题,从而实现对各种文字形式的高精度识别。
结语文字识别的模板匹配技术在特定场景下仍具有重要意义,但随着科技的不断进步和发展,我们有理由相信,在未来的技术创新中,会有更多更先进的方法能够实现对文字的更准确、更快速的识别和处理。
文字识别(OCR)的模板匹配技术是一种常见的文字识别方法,它在如今的数字化世界中扮演着越来越重要的角色。
随着人们对数字信息的需求不断增加,文字识别技术的发展也变得日益迫切。
模板匹配技术作为一种成熟稳定的文字识别方法,具有一定的优势和局限性。
模板匹配技术的原理可以简单理解为对图像进行像素级的比对,找到最相似的部分。
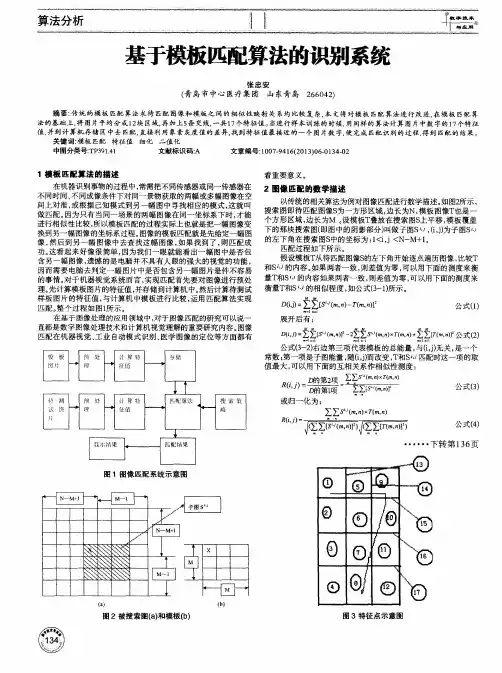
基于模板匹配算法的识别系统作者:张忠安来源:《数字技术与应用》2013年第06期摘要:传统的模板匹配算法求待匹配图像和模板之间的相似性映射关系均比较复杂,本文将对模板匹配算法进行改进,在模板匹配算法的基础上,将图片平均分成12块区域,再加上5条交线,一共17个特征值。
当进行样本训练的时候,用同样的算法计算图片中数字的17个特征值,并到计算机存储区中去匹配,直接利用象素灰度值的差异,找到特征值最接近的一个图片数字,便完成匹配识别的过程,得到匹配的结果。
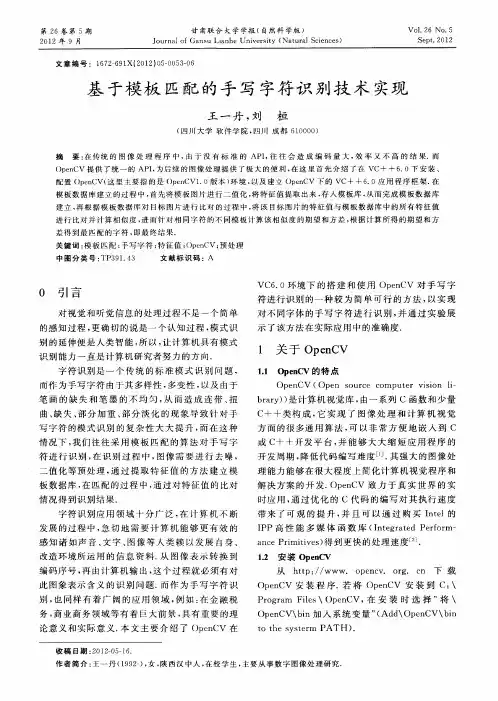
关键词:模板匹配特征值细化二值化中图分类号:TP391.41 文献标识码:A 文章编号:1007-9416(2013)06-0134-021 模板匹配算法的描述在机器识别事物的过程中,常需把不同传感器或同一传感器在不同时间、不同成像条件下对同一景物获取的两幅或多幅图像在空间上对准,或根据己知模式到另一幅图中寻找相应的模式,这就叫做匹配。
因为只有当同一场景的两幅图像在同一坐标系下时,才能进行相似性比较,所以模板匹配的过程实际上也就是把一幅图像变换到另一幅图像的坐标系过程。
图像的模板匹配就是先给定一幅图像,然后到另一幅图像中去查找这幅图像,如果找到了,则匹配成功。
这看起来好像很简单,因为我们一眼就能看出一幅图中是否包含另一幅图像,遗憾的是电脑并不具有人眼的强大的视觉的功能,因而需要电脑去判定一幅图片中是否包含另一幅图片是件不容易的事情。
对于机器视觉系统而言,实现匹配首先要对图像进行预处理。
先计算模板图片的特征值,并存储到计算机中。
然后计算待测试样板图片的特征值,与计算机中模板进行比较,运用匹配算法实现匹配。
整个过程如图1所示。
在基于图像处理的应用领域中,对于图像匹配的研究可以说一直都是数字图像处理技术和计算机视觉理解的重要研究内容。
图像匹配在机器视觉、工业自动模式识别、医学图像的定位等方面都有着重要意义。
2 图像匹配的数学描述3 算法的改进及图示根据以上对模板匹配的介绍,可以对字符图像进行识别。
![一种基于模板匹配的OCR识别方法及其系统[发明专利]](https://uimg.taocdn.com/37767b7468eae009581b6bd97f1922791688beff.webp)
(19)中华人民共和国国家知识产权局(12)发明专利申请(10)申请公布号 (43)申请公布日 (21)申请号 202010715323.4(22)申请日 2020.07.23(71)申请人 厦门商集网络科技有限责任公司地址 361101 福建省厦门市厦门火炬高新区创业园轩业楼3008室(72)发明人 庄国金 陈文传 陈昊 温亦汝 杨龙 吕晓君 郑宇 (74)专利代理机构 福州科扬专利事务所 35001代理人 何小星(51)Int.Cl.G06K 9/34(2006.01)G06K 9/32(2006.01)G06K 9/46(2006.01)G06T 5/00(2006.01)G06T 7/11(2017.01)G06F 40/216(2020.01)(54)发明名称一种基于模板匹配的OCR识别方法及其系统(57)摘要本发明涉及一种基于模板匹配的OCR识别方法及其系统,通过对图像进行预处理,投影切割字符,将字符划分为多个网格,并计算网格特征值,将特征值与模板特征值比对计算相似度,以相似度最高的模板作为识别结果。
本发明有益效果:适用于大部分场景,算法开发难度低,效率高,识别精度高。
权利要求书4页 说明书10页 附图4页CN 111914847 A 2020.11.10C N 111914847A1.一种基于模板匹配的OCR识别方法,其特征在于,包括如下步骤:S1:获取目标图像;S2:对所述目标图像进行预处理;S3:对经过预处理的目标图像进行字符切割,以获得单独的字符图像,利用投影算法对所述字符进行切割处理;S4:将所述单独的字符图像进行垂直投影分割获得N个一级网格,对所述一级网格进行水平投影分割获得N2个二级网格,对所述二级网格进行垂直投影分割获得2N2个三级网格,对所述三级网格进行水平投影分割获得4N2个四级网格,其中,N的取值大于2;S5:计算所有的所述四级网格的特征值,所述特征值包括:笔画方向的对比特征值,横竖笔画判断的位特征值,撇捺笔画判断的位特征值,大小判断的位特征值,形状判断的位特征值;S6:将所述特征值与字符模板的对应特征值按照从左到右的顺序,依次比对对应位置的数值,如果数值一致,则相似度加1,计算所有特征值的相似度总和,取相似度总和最大的字符模板所代表的字符作为字符识别结果。
基于模板匹配算法的字符识别研究随着信息技术的发展,字符识别技术在各个领域的应用越来越广泛。
本文主要探讨基于模板匹配算法的字符识别技术,旨在提高字符识别的准确性和效率。
本文将介绍模板匹配算法的原理及其在字符识别中的应用;阐述常用的字符识别技术,如图像处理、深度学习等;通过实验分析模板匹配算法在字符识别中的有效性和可行性。
模板匹配算法是一种常见的图像处理技术,其基本原理是将输入图像与预先定义的模板进行比较,找到最相似的部分。
在字符识别领域,模板匹配算法通常用于识别特定的字符或符号。
需要将待识别的字符或符号定义为模板,并将模板存储在数据库中。
在识别过程中,将输入的图像与数据库中的模板逐一进行比较,找出最相似的字符或符号。
字符识别技术是利用计算机技术自动识别图像中的字符或符号。
除了模板匹配算法外,常用的字符识别技术还包括图像处理和深度学习等。
图像处理技术主要是通过对图像进行预处理、特征提取等操作,为后续的字符识别提供更好的图像数据。
深度学习则是利用神经网络模型进行字符识别,其具有强大的自适应能力和鲁棒性,可以处理各种复杂的字符和字体。
基于模板匹配算法的字符识别研究是本文的重点。
目前,该领域的研究主要集中在如何提高模板匹配算法的准确性和效率方面。
一些研究者通过优化算法参数、选择更合适的特征提取方法等手段来提高准确性;另一些研究者则从数据库优化、多模板匹配等方面入手来提高识别效率。
随着深度学习技术的发展,也有越来越多的研究者将深度学习应用于字符识别,取得了不错的成果。
为了证明模板匹配算法在字符识别中的有效性和可行性,我们设计了一系列实验进行测试。
我们选取了多种不同的字符模板,包括数字、英文字母、中文字符等,并使用不同的图像处理技术对这些模板进行预处理。
然后,我们将这些模板与待识别的字符图像进行比较,并采用主观和客观两种方式评价算法的准确性和效率。
实验结果表明,基于模板匹配算法的字符识别技术在某些场景下具有较高的准确性和效率,但面对复杂多变的字符和字体时仍存在一定的局限性。
基于模板匹配的车牌字符识别算法研究
王帅;刘光宇;李俊松;程远;周豹;赵恩铭;张令通
【期刊名称】《武汉船舶职业技术学院学报》
【年(卷),期】2024(23)1
【摘要】基于模板匹配的字符识别是车牌识别中重要的研究方法,该方法下组成的车牌识别系统涵盖了图像预处理、车牌定位、字符分割以及模板匹配等主要内容。
该算法首先对拍照获取的车牌图像进行灰度化、边缘检测、阈值分割等预处理,其目的是为得到只含有车牌信息的图像;然后将车牌图像进行腐蚀处理,确定车牌区域,并且通过二值化得到突出车牌字符信息的二值图像,以便于进行字符分割;最后再将分割出的字符与字符模板进行匹配得到准确的识别结果。
实验结果表明:基于该方法所实现的车牌识别系统,其识别过程简单且便捷,对于车牌的定位较为精准,能够较好地满足车牌识别的基本要求。
【总页数】6页(P97-102)
【作者】王帅;刘光宇;李俊松;程远;周豹;赵恩铭;张令通
【作者单位】大理大学;上海交通大学;中国人民解放军32268部队
【正文语种】中文
【中图分类】TP317.4
【相关文献】
1.一种基于改进模板匹配的车牌字符识别方法
2.基于模板匹配和SVM的车牌字符识别研究
3.基于改进模板匹配的车牌字符识别算法实现
4.基于模板匹配的车牌字符识别算法研究
因版权原因,仅展示原文概要,查看原文内容请购买。
基于模板匹配的手写数字识别技术研究引言手写数字识别一直是计算机视觉领域的热门问题之一。
随着数字化时代的到来,手写数字识别已经成为了人们生活和工作中不可缺少的一部分。
如何快速、准确地识别手写数字对于现代社会而言具有重要的意义。
本文将介绍基于模板匹配的手写数字识别技术的研究现状和发展趋势。
一、手写数字识别技术的发展历程手写数字识别技术的起源可以追溯到20世纪70年代。
当时,人们开始使用数字信号处理技术,如傅里叶变换和相关方法等,来处理手写数字。
20世纪80年代初期,人们开始使用神经网络来处理手写数字。
此后,虽然出现了一些其他的手写数字识别算法,但是神经网络一直是主流方法之一。
二、基于模板匹配的手写数字识别技术的研究现状随着计算机硬件和软件的快速发展,基于模板匹配的手写数字识别技术逐渐成为了一种研究热点。
模板匹配方法的基本思想是将待识别的手写数字与已有的数字模板进行比较,找到最相似的数字,并将其作为识别结果。
目前,基于模板匹配的手写数字识别技术已经取得了很大的进展。
研究者们主要从以下几个方面展开研究:1. 特征提取特征提取是模板匹配方法中的重要环节。
特征提取的主要思想是将图像中的数字特征(如笔画、交叉等等)提取出来,并将其量化为数字特征向量。
目前,研究者们使用的特征提取方法主要包括边缘检测、灰度共生矩阵等。
2. 模板匹配算法模板匹配算法是手写数字识别的核心算法。
目前,研究者们主要使用的模板匹配算法有均方差匹配算法、相关性匹配算法、最小平方匹配算法等。
3. 识别率提升提高识别率是手写数字识别技术的重要目标之一。
目前,研究者们主要从以下几个方面来提高识别率:增加样本数量、优化特征提取算法、改进模板匹配算法等。
三、基于模板匹配的手写数字识别技术的未来发展趋势基于模板匹配的手写数字识别技术未来的发展趋势主要有以下几点:1. 深度学习算法的应用随着深度学习算法的不断发展,研究者们开始尝试将其应用于手写数字识别领域。
一种基于模板匹配的字符识别方法专利名称:一种基于模板匹配的字符识别方法技术领域:本发明属于模式识别与图像处理技术领域,具体涉及模板匹配识别,本方法用于对图像中的字符进行识别,从而将图像信息转化为文字信息。
背景技术:字符识别是许多智能系统的关键组成部分。
例如在车牌识别系统中,字符识别是最后一步。
字符识别属于模式识别范畴,现有的模式识别在理论、方法与实践方法的成果,为字符识别提供了丰富的解决方法。
从统计模式识别的观点来看,字符的识别实际上一个模式分类的问题。
国内外学者提出了许多不同的识别方案,大致可分为基于分类器的识别方法和基于模式/模板匹配的方法。
从公开的论文来看,利用分类器进行识别的方法可以获得较好的识别结果。
例如有 D. Llorens 等人提出的 “Car License Plates Extraction and Recognition Based onConnected Components Analysis and HMM Decoding”。
但是分类器的方法需要大量的学习样本进行训练。
同时,像ANN这样的分类算法存在收敛性和过学习的问题。
模板匹配算法适用于没有旋转角的固定大小的单字符识别。
通常采用的是对二值图像进行匹配。
P. Comelli 等人在文献“Optical recognition of motor vehicle licenseplates. ”中提出了模板匹配在字符识别中的应用。
从实时性、算法复杂性等角度考虑,模板匹配算法能够满足字符识别的任务。
但是模板匹配也有其缺陷,即对同一类字符在不同图像中的尺度多变性以及光照多变性敏感,容易产生匹配偏差,因此,需要加入特殊处理手段。
这也是在本发明中,着重解决的问题。
发明内容针对现有技术存在的上述问题,本发明提出一种基于模板匹配的字符识别方法,该方法在传统的模板匹配算法基础上,加入多尺度和位移变换,以解决实际场景中存在的字符多样性问题。
模板匹配毕业论文前言模板匹配是一种常用的机器视觉技术,用于在图像中查找与给定模板图像相似的区域。
在实际应用中,模板匹配可以用于目标检测、物体识别、图像跟踪等领域。
本文将介绍模板匹配的基本原理、算法及其在实际应用中的应用。
一、模板匹配的基本原理模板匹配的基本思想是将模板图像与待处理图像进行比较,找到图像中与模板图像最相似的区域。
在实际应用中,通常将模板图像表示为一个矩阵,待处理图像也可以转化为一个矩阵。
这样,就可以将模板匹配问题转化为一个矩阵匹配问题。
模板匹配的基本原理可以分为以下几个步骤:1. 载入处理图像和模板图像2. 将模板图像与处理图像进行比较3. 得到匹配结果4. 显示匹配结果二、模板匹配的算法常见的模板匹配算法包括平方差匹配法、相关系数匹配法和归一化互相关匹配法。
下面分别介绍这三种算法的基本原理和应用。
1. 平方差匹配法平方差匹配法是一种基于欧式距离计算的匹配法,它的基本原理是计算待处理图像和模板图像之间的平方差,然后找到平方差最小的位置作为匹配结果。
平方差匹配法的计算公式如下:$$R(x,y)=\\sum_{x',y'}(T(x',y')-I(x+x',y+y'))^{2}$$其中,R(x,y)表示模板图像T(x',y')和待处理图像I(x+x',y+y')之间的平方差。
x和y分别表示待处理图像上的像素位置。
平方差匹配法的缺点是对光照变化不敏感,因此在应用中常常需要进行预处理,如图像灰度化、直方图均衡化等。
2. 相关系数匹配法相关系数匹配法是一种基于图像亮度和对比度计算的匹配法,它的基本原理是计算待处理图像和模板图像之间的相关系数,然后找到相关系数最大的位置作为匹配结果。
相关系数匹配法的计算公式如下:$$ R(x,y)=\\frac {\\sum_{x',y'}(T(x',y')-\\bar T)(I(x+x',y+y')-\\bar I)} {\\sqrt {\\sum_{x',y'}(T(x',y')-\\bar T)^2\\sum_{x',y'}(I(x+x',y+y')-\\bar I)^2}} $$其中,R(x,y)表示模板图像T(x',y')和待处理图像I(x+x',y+y')之间的相关系数。
一种基于模板匹配的算法自动识别方法的开题报告题目:一种基于模板匹配的算法自动识别方法的研究背景:模板匹配是计算机视觉领域中的一种常用方法。
它通过将模板与图像进行比较,寻找相似性,从而实现图像匹配、目标检测、自动识别等应用。
在图像处理、数字信号处理、机器视觉、智能交通等领域,模板匹配都有广泛的应用。
但是,模板匹配的精度取决于模板的质量和数量。
传统的模板制作方法需要大量的人工干预,费时费力,并且很容易受到噪声、光照等因素的影响。
因此,如何在模板匹配中实现自动化识别,成为了解决问题的一个重要环节。
研究内容:本文提出了一种基于模板匹配的算法自动识别方法。
该方法包括以下步骤:1.图像预处理:对输入的图像进行处理,包括去燥、平滑、反转等操作,使得图像更适合进行后续操作。
2.特征提取:从待匹配的图像中提取相应的特征,包括颜色直方图、形状、纹理等信息。
3.模板匹配:将提取的特征与已知的模板进行比较匹配,在比较中找到相似性最高的部分,从而实现自动识别。
4.结果分析:根据匹配结果,进行结果分析判断,识别出目标信息。
研究意义:本研究的意义在于提出了一种基于模板匹配的算法自动识别方法。
与传统的人工干预方法相比,本方法无需大量的人工制作模板,省去了大量的时间和劳动力,在一定程度上提高了识别的准确率和速度。
结论:通过实验,本研究的方法在模板匹配中具有一定的优势,可以实现目标自动识别,为应用于智能交通、机器视觉等领域提供了一个新的思路。
然而,本方法在复杂场景下仍存在识别误差等困难,需要进一步研究和探索。
中南民族大学毕业论文(设计)学院: 计算机科学学院专业: 软件工程年级:2009 题目: 基于模板匹配算法的数字识别学生姓名: 李成学号:09065093指导教师姓名: 李波职称: 讲师2013年5月中南民族大学本科毕业论文(设计)原创性声明本人郑重声明:所呈交的论文是本人在导师的指导下独立进行研究所取得的研究成果。
除了文中特别加以标注引用的内容外,本论文不包含任何其他个人或集体已经发表或撰写的成果作品。
本人完全意识到本声明的法律后果由本人承担。
作者签名:2013年月日摘要 (1)Abstract (1)1 绪论 (2)1.1 研究目的和意义 (2)1.2 国内外研究现状 (2)2 本文基本理论介绍 (3)2.1 位图格式介绍 (3)2.2 二值化 (3)2.3 去噪 (3)2.4 细化 (4)2.5 提取骨架 (4)3 图像的预处理 (5)3.1 位图读取 (5)3.2 二值化及去噪声 (5)3.3 提取骨架 (6)4 基于模板匹配的字符识别 (8)4.1 样本训练 (8)4.2 特征提取 (8)4.3 模板匹配 (9)4.4 加权特征模板匹配 (10)4.5 实验流程与结果 (10)5 结论 (16)5.1 小结 (16)5.2 不足 (16)6 参考文献 (17)基于模板匹配算法的数字识别摘要数字识别已经广泛的应用到日常生活中,典型的数字自动识别系统由图像采集、预处理、二值化、字符定位、字符分割和字符识别等几部分组成, 这些过程存在着紧密的联系。
传统的模板匹配算法因为图像在预处理之后可能仍然存在较大的干扰,数字笔画粗细不均匀,有较大的噪声,识别效率不高。
本文采的主要思想就是对字符进行分类,之后对字符进行细化,提取细化后字符的特征矢量,与模板的特征矢量进行加权匹配,误差最小的作为识别结果。
本文在模板匹配法的基础上, 采用了特征值加权模板匹配法, 并且改进了匹配系数的求法。
应用该法取得了满意的效果, 提高了识别率。
基于模板匹配的光学字符识别技术研究近年来,随着人工智能技术的不断发展,光学字符识别技术也得到了显著的进展。
基于模板匹配的光学字符识别技术是其中一种比较成熟的技术。
本文将对基于模板匹配的光学字符识别技术进行研究和探讨。
一、模板匹配原理基于模板匹配的光学字符识别技术是通过将待识别字符与已知字符进行比对,从而进行识别的。
其核心原理是利用已知字符的特征作为模板,并将其与待识别字符进行匹配,从而得出它们的相似度,最终确定待识别字符的类型。
二、模板匹配方法在模板匹配技术中,模板的选择是一个非常重要的环节。
提高模板匹配的准确性,需要选取尽可能多的不同或相似的模板。
1. 模板图像获取获取模板图像时,既可以用人工制作的样本,也可以用现成的字体资料库,甚至可以利用字符生成软件进行生成。
模板图像的获取具有很强的主观性,所以要选择一些良好的模板,这是制造高精度OCR系统的前提。
2. 特征提取特征选择具有重要意义,对于提高识别率有很大影响。
对于同一个字符,由于字体、大小、倾角、灰度等因素的变化,它的特征也是不同的。
针对这一问题,一些常用的特征提取方式,如投影法、轮廓变换、极坐标变换等方式被广泛采用,以提高识别的精度和准确性。
3. 模板匹配模板匹配就是比较待识别字符与模板库中的已知字符,利用字符的特征进行匹配比较。
匹配可以分类为两类,一是相似性度量法,二是分类决策方法。
基于概率分布的相似性度量法是目前常见的方法。
它将待识别字符与已知字符进行匹配,计算它们之间的相似度,选取相似度最高的作为待识别字符的类别,从而实现字符识别。
三、模板匹配的优缺点模板匹配技术具有优缺点并存。
1. 优点(1) 精度高: 模板匹配技术对于类似字符的识别效果较好。
(2) 实用性强: 模板匹配技术的原理和方法均较易理解,易于实现,因此受到广泛的应用。
它不受文字排版次序的限制,且识别难度与字体无关,因此具有较强的实用性。
2. 缺点(1) 可扩展性差: 字符库过大时,匹配时间会变得非常长,对于大规模的识别任务,其缺点也比较明显。
合肥学院毕业设计(论文)设计(论文)题目基于模板匹配算法的字符识别系统研究与实现院系名称计算机科学与技术系专业(班级)计算机科学与技术姓名(学号)指导教师系负责人摘要自从计算机问世以来,让机器具有模式识别能力一直是计算机科学家们的努力方向。
研究表明,对视觉和听觉信息的处理过程,不仅仅是一个感知过程,也是一个认知过程。
因此,研究模式识别,是理解人类智能的本质的重要途径。
字符识别是一个传统和典型的模式识别问题,脱机手写数字识别是一个典型的大类别的模式识别问题。
手写体数字具有不同字符字型相差不大、相同字符有多种不同写法、数字没有上下文关系等等特点,使得脱机手写体数字识别成为识别领域最大的难题和最终的目标。
在这种大类别识别的研究中,传统上大多采用模板匹配的方法来解决问题。
而在模板匹配算法中,得计算其特征值。
图像需要经过二值化,细化等预处理。
关键字模板匹配;特征值;细化;二值化ABSTRACTSince computer appeared, it has been an effort direction for scientist to let the computer has the ability of pattern recognition. Researching indicates that the procedure to deal with seeing and hearing not only a procedure of perception but also cognition. Therefore, studying pattern recognition is an important way in understanding the mankind’s intelligence and ability. Character recognition is a traditional and typical pattern recognition problem, and Handwritten Numeral Recognition is a typical large vocabulary pattern recognition problem. Different characters do not vary much, the same character can be written in many ways, there is no context between characters, and so on. Because of so many characteristics, Handwritten Numeral Recognition is a very difficult problem and commonly regarded as one of the ultimate goals of character recognition research. And the template matching algorithm, in its calculation of eigenvalues. Image require two value, thinning and other pretreatment.引言手写数字识别(Handwritten Numeral Recognition)是光学字符识别技术(Optical Character Recognition,简称OCR)的一个分支,它研究的对象是:如何利用电子计算机自动辨认人手写在纸上的阿拉伯数字。
在整个OCR领域中,最为困难的就是脱机手写字符的识别。
到目前为止,尽管人们在脱机手写英文、汉字识别的研究中已取得很多可喜成就,但距实用还有一定距离。
而在手写数字识别这个方向上,经过多年研究,研究工作者已经开始把它向各种实际应用推广,为手写数据的高速自动输入提供了一种解决方案。
手写数字识别作为模式识别领域的一个重要问题,也有着重要的理论价值:(1).阿拉伯数字是唯一的被世界各国通用的符号,对手写数字识别的研究基本上与文化背景无关,这样就为各国,各地区的研究工作者提供了一个施展才智的大舞台。
在这一领域大家可以探讨,比较各种研究方法。
(2).由于数字识别的类别数较小,有助于做深入分析及验证一些新的理论。
这方面最明显的例子就是人工神经网络------相当一部分的ANN模型和算法都以手写数字识别作为具体的实验平台,验证理论的有效性,评价各种方法的优缺点。
(3).尽管人们对手写数字的识别已从事了很长时间的研究,并已取得了很多成果,但到目前为止机器的识别本领还无法与人的认知能力相比,这仍是一个有难度的开放问题。
(4).手写数字的识别方法很容易推广到其它一些相关问题棗一个直接的应用是对英文这样的拼音文字的识别。
事实上,很多学者就是把数字和英文字母的识别放在一块儿研究的。
人类认知事物的过程中,视觉起到了举足轻重的作用。
视觉是人类最高级的感知器官,它不仅指对光信号的感受,还包括了对视觉信息的获取、传输、处理、存储与理解的全过程。
随着工业自动化的发展,机器视觉作为一种应用系统逐渐得到完善和发展。
机器视觉就是用机器代替人眼来做测量和判断。
其特点是能够提高生产的柔性和自动化程度,在一些不适合人工作业的危险工作环境或人工视觉难以满足要求的场合,常用机器视觉来替代人工视觉;同时在大批量工业生产过程中,用人工视觉检查产品质量效率低且精度不高,用机器视觉检测方法可以大大提高生产效率和生产的自动化程度。
而且机器视觉易于实现信息集成,是实现计算机制造的基础技术。
在机器视觉中,常常需要从图像背景中把感兴趣的物体检测出来,模板匹配是最常用也是最基本的方法。
随着信号处理技术和计算机技术的不断发展,模板匹配在工业检测、卫星遥感、半导体封装、文字识别、导航制导、医学X射线图片处理、气象云图分析、光学和雷达的图像模板跟踪、工业流水线的自动监控、工业仪表的自动监控、资源分析、交通管理、图像数据库检索以及景物分析中的变化检测等领域应用越来越广泛。
可见,匹配技术己经成为机器视觉和众多领域中不可或缺的组成部分,对图像匹配技术进行探索研究势在必行。
在下面各章我将以一个字符识别系统为例,就字符识别概述、模板匹配算法及改进、图像预处理、系统的具体实现等方面进行描述。
第一章绪论。
第二章模板匹配算法及改进。
第三章图像的预处理。
第四章系统的设计与实现。
第五章系统运行及测试。
结束语部分对本次毕业设计做出总结。
目录摘要 (2)ABSTRACT (3)引言 (4)第一章绪论1.1 课题研究背景意义 (7)1.2 字符识别概述 (7)1.3 字符识别分类 (8)1.4 研究对象及目标 (8)1.4.1 研究的对象 (8)1.4.2 研究的目标 (8)第二章模板匹配算法及改进2.1 模板匹配算法描述 (9)2.2 模板匹配算法的数学描述 (10)2.3 算法的改进及图示 (11)第三章图像的预处理3.1 图像的平滑去噪 (14)3.2 BMP图像的存储结构 (15)3.3 颜色处理 (17)3.4 图像的二值化 (17)3.5 图像的细化 (18)3.5.1 细化算法的定义 (18)3.5.2 细化的要求 (19)3.5.3 Hilditch算法描述 (19)第四章系统的设计与实现4.1 Visual C++ 6.0介绍 (21)4.1.1 环境安装及选择的原因 (21)4.1.2 MFC概述 (21)4.2 系统界面按扭的生成 (21)4.3 模板计算的实现 (23)4.3.1 模板计算设计思想 (23)4.3.2 代码实现 (23)4.4 样本测试的实现 (25)4.4.1 样本测试设计思想….…………………………………………………..… ..254.4.2 代码实现 (25)第五章系统运行及测试5.1 系统的运行 (28)5.2 系统的测试 (28)5.3 系统的评价 (30)结束语 (30)参考文献 (30)致谢语 (31)附录部分代码清单 (31)第一章字符识别概述1.1 课题研究背景意义在机器视觉中,常常需要从图像背景中把感兴趣的物体检测出来,模板匹配是最常用也是最基本的方法。
随着信号处理技术和计算机技术的不断发展,模板匹配在工业检测、卫星遥感、半导体封装、文字识别、导航制导、医学X射线图片处理、气象云图分析、光学和雷达的图像模板跟踪、工业流水线的自动监控、工业仪表的自动监控、资源分析、交通管理、图像数据库检索以及景物分析中的变化检测等领域应用越来越广泛。
可见,匹配技术己经成为机器视觉和众多领域中不可或缺的组成部分,对图像匹配技术进行探索研究势在必行。
手写数字识别有着极为广泛的应用前景,这也是受到研究者重视的一个主要原因。
比如说在大规模的数据统计(如行业年鉴、人口普查等)中,在财务、税务、金融领域中,在邮件分拣中均有着应用。
1.2 字符识别概述计算机硬件的迅速发展以及计算机应用领域的不断开拓,急切地需要计算机能够更有效的感知诸如声音、文字、图像等人类赖以发展自身、改造环境所运用的信息资料。
但就一般意义来说,目前计算机却无法感知他们,键盘,鼠标等输入设备,对于五花八门的外部世界显得无能为力。
虽然电视摄象机、图文扫描仪、话筒等设备已解决了上述非电信号的转换,并与计算机联机,但这并不能使计算机真正知道所接受的究竟是什么信息。
计算机对外部世界感知能力的低下,成为开拓计算机应用的瓶颈,也与其高超的运算能力形成强烈的对比。
因此,着眼与提高计算机感知外部信息能力的学科----模式识别得到了迅速的发展。
在模式识别领域中,手写字符的识别是一个非常活跃的研究方向。
但这方面的研究工作已有很多,其中不少成果得到了广泛的应用。
但是由于手写字符拓扑结构的多样性,目前已有的手写字符识别体统在对无限制手写字符进行分类时,始终存在这样或那样的缺陷。
字符识别是模式识别领域中的一个非常活跃的分支。
这一方面是由于问题本身的难度使之成为一个极具挑战性的课题。
另一方面,是因为字符识别不是一项孤立的应用技术,其中包含了模式识别领域中其它分之都会遇到的一些最基本的和共性的问题。
也正是由于字符识别技术的飞速发展,才促使识别领域和图像分析发展为一个成熟的科学领域。
字符识别技术的研究主要集中在特征抽取和模式匹配两个方面,这一直是光学字符识别(OCR)技术的两大关键所在。
由扫描仪转化后的字符二值图像中各点的值,可以看成是该字符的一组特征。
但由于这组特征的数量较大,而每个特征所含的信息量很少,因此有必要通过映射或变换的方法将信息集中到少量的特征中。
这个过程就叫特征抽取。