开源的GNSS研究接收机--Namuru
Peter J Mumford, Kevin Parkinson, Andrew G Dempster
新南威尔士州大学
简介
Peter Mumford是澳大利亚新南威尔士大学测量及空间信息系统研究学院的一名研究员。目前,他正在做关于GNSS接收机设计以及INS/GNSS集成的工作。Peter拥有一个测量方向的工程学位以及一个数学的学术学位,擅长FPGA、嵌入式软件以及GNSS领域的电子设计。
Kevin Parkinson完成工程学位学习之后就一直从事于电子设计工作。目前他正在新南威尔士大学卫星导航与定位团队里攻读工程硕士学位。他感兴趣的研究方向包括GPS系统、FPGA设计、嵌入式系统、低功耗射频设计以及信号处理。
Andrew Dempster 教授是2004年新南威尔士州大学测量与空间信息系统学院的特约研究指导。他的研究内容是GPS接收机信号处理、软件分支以及新的定位技术。不仅如此,在Auspace 有限公司,他是参与澳大利亚第一代GPS接收机开发的项目经理及系统工程师。
摘要
Namuru是新南威尔士州大学开发的开放式GNSS接收机研究平台的名称。本文讲述了最新的设计细节、结果以及Namuru项目团队所获得的成果。该平台包含三个方面:定制电路板,基带处理器(相关单元)逻辑设计以及应用固件. 电路板以及基带处理器设计都是开放的。定制电路板包含一个L1 GPS 射频前端以及Altera 或Cyclone 公司的FPGA芯片、三轴加速度传感器及各种各样的IO口和存储单元。电路板已经过精心设计以保证射频前端周围的噪声尽可能的低。电路板设计的细节及性能在本文中也有介绍。该固件在FPGA芯片中运行的是NiosII软核处理器。基于GPS框架的几个版本的固件都有二进制或其他备用的开源GNSS项目固件所适合的格式。
这款基带处理器设计的简洁直接以使之尽可能广地满足GNSS相关的研究人员的开发需要。研究人员可以修改或添加FPGA中的VHDL或Verilog代码对原有功能进行提高或加强。Namuru
平台支持各种领域的研究,如研究新信号、多径效应、微弱信号、信号干扰、定时应用、多传感器信息融合、捕获策略以及可重复配置设计。Altera公司的设计工具Quartus和NiosII IDE分别用来开发逻辑单元和固件。Altera是最好的FPGA芯片生产商之一,其开发工具非常易于开发,受到大家的广泛好评。Namuru平台上的L1频段GPS 接收机参考设计拥有可与大多数基于ASIC标准、用于一般市场上的接收机相比拟的性能。测试表明,在一定的动态范围内,GPS仿真器产生的信号与真实信号差不多。测试的结果以及改进方法都已给出。
介绍
Namuru接收机项目自2004年开始至今,目前已开发出包括一块高性能开发板、VHDL和Verilog基带设计以及使用Altera公司NiosII 软核处理器的Mitel GPS结构的固件。测试结果表明它拥有Signav MG5001接收机类似的性能[1]。更加详细的内容参见参考文献2、3。从数据以及动态测试得出的讨论及结果会在一个简单的关于敏感性研究的过程中得以介绍。另外,我们对接收机中使用到的跟踪环路的轮廓进行了描述,还对将来的研究方向进行了展望。
NAMURU 电路板
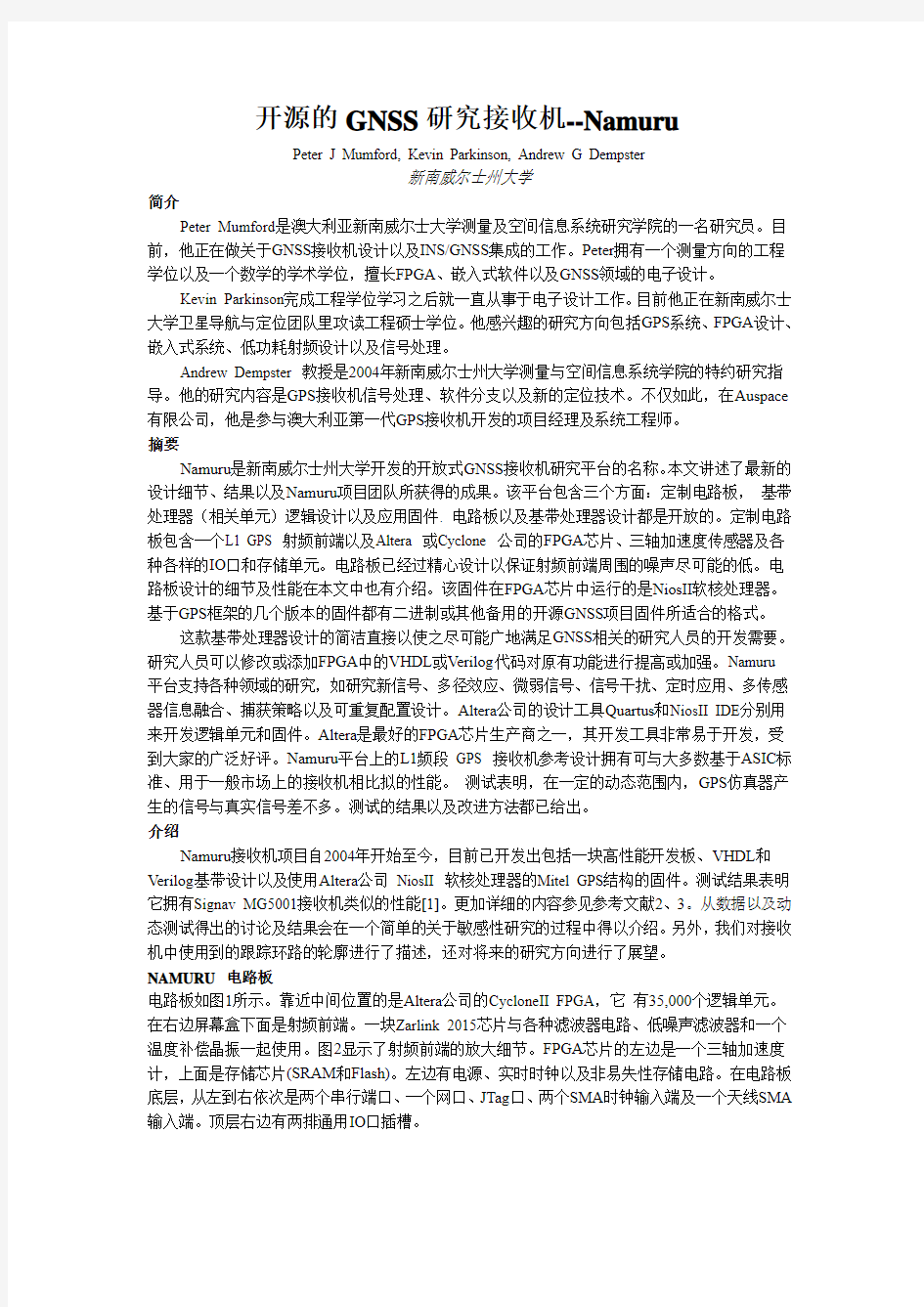
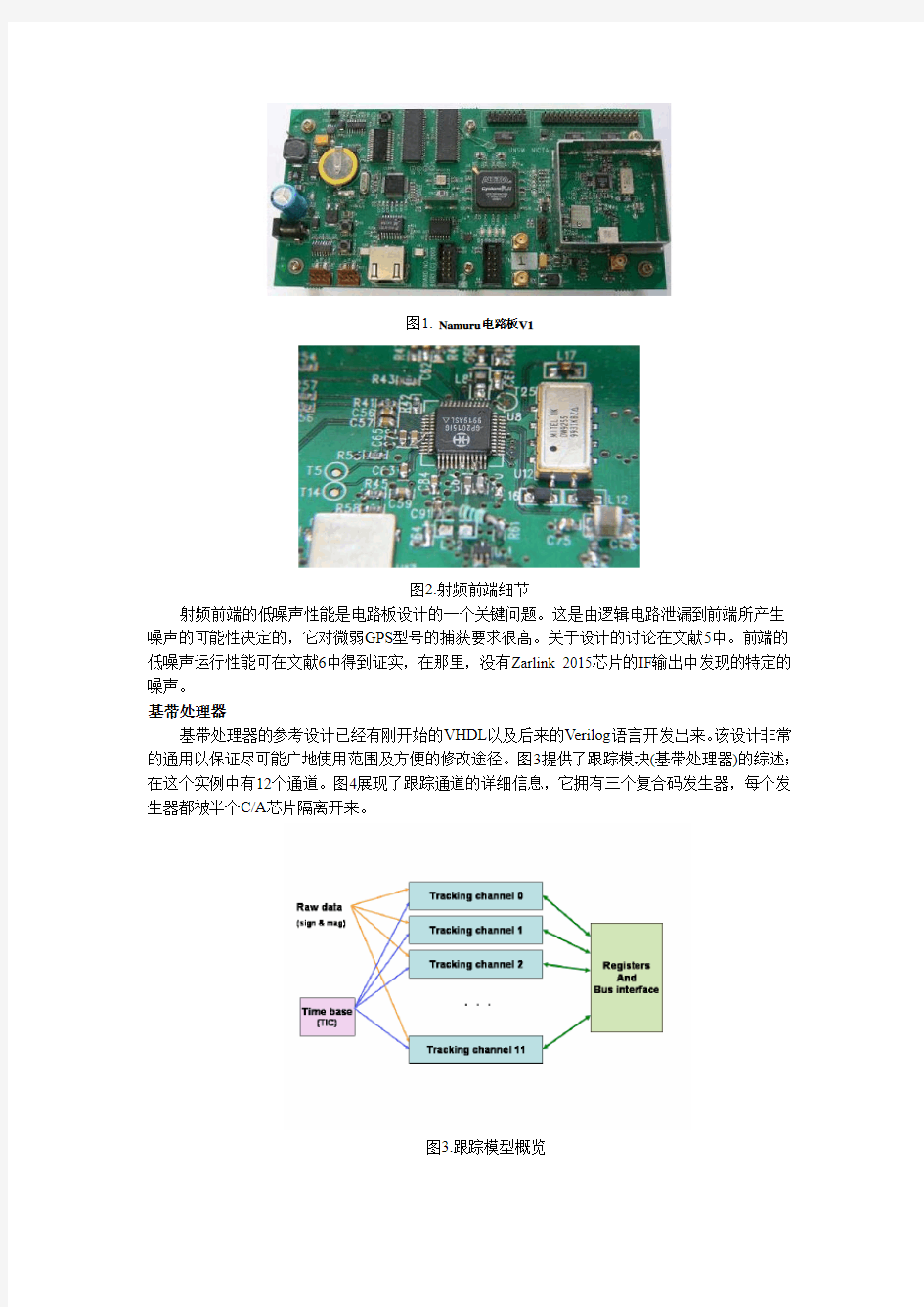
电路板如图1所示。靠近中间位置的是Altera公司的CycloneII FPGA,它有35,000个逻辑单元。在右边屏幕盒下面是射频前端。一块Zarlink 2015芯片与各种滤波器电路、低噪声滤波器和一个温度补偿晶振一起使用。图2显示了射频前端的放大细节。FPGA芯片的左边是一个三轴加速度计,上面是存储芯片(SRAM和Flash)。左边有电源、实时时钟以及非易失性存储电路。在电路板底层,从左到右依次是两个串行端口、一个网口、JTag口、两个SMA时钟输入端及一个天线SMA 输入端。顶层右边有两排通用IO口插槽。
图1. Namuru电路板V1
图2.射频前端细节
射频前端的低噪声性能是电路板设计的一个关键问题。这是由逻辑电路泄漏到前端所产生噪声的可能性决定的,它对微弱GPS型号的捕获要求很高。关于设计的讨论在文献5中。前端的低噪声运行性能可在文献6中得到证实,在那里,没有Zarlink 2015芯片的IF输出中发现的特定的噪声。
基带处理器
基带处理器的参考设计已经有刚开始的VHDL以及后来的Verilog语言开发出来。该设计非常的通用以保证尽可能广地使用范围及方便的修改途径。图3提供了跟踪模块(基带处理器)的综述;在这个实例中有12个通道。图4展现了跟踪通道的详细信息,它拥有三个复合码发生器,每个发生器都被半个C/A芯片隔离开来。
图3.跟踪模型概览
图4.跟踪通道细节
跟踪模块通过Altera公司的Avalon总线连接到Altera公司的NiosII软核CPU并作为外围存储器映射出现在地址空间中。模块的配置和控制通过写相关寄存器来实现,数据采集通过读相关寄存器实现。数据手册(见[7])提供了详细的寄存器操作指令及映射。
应用软件
Zarlink GP215 射频芯片与两个芯片GP2021和GP4020配合进行基带处理。这些芯片的开发可追溯到1900年通用汽车公司的Plessey和Mitel。可能是为了支持芯片销售,应用代码的开发使用通用汽车公司的GPS Builder(见[8])及后来Mitel的GPS Architect(见[9])。GPS Architect软件是与硬件一起作为开发套件发布的。该套件曾一段时间被南威尔士大学测量学院以及战略信息系统“捕获实验室”用于探索各种各样的GPS研究方向。该软件已用于Signav使用Zarlink GP2015和GP4020芯片的MG5001接收机。它很显然可用于Namuru平台,我们可以稳定地运行并得到准确的PVT结果。本文中的测试结果是通过在Namuru和Signav MG5001这两个平台上运行Architect 变量所获得的。能够在不同平台上运行本质上相同的软件提供了一种便捷的收据数据和性能对比的途径。
Architect软件拥有对每个通道进行码相关运算提供一系列搜索策略的工具。相关的能量阈值是根据检测的敏感性和误检测可能性的折中决定的。检测到之前的相关能量公式如下:
(1)
其中,I是同相相关器的组合,Q是正交相关器的组合。
在GP2021/GP4020中拥有两个复合相关器;prompt和tracking分别占用半个芯片。跟踪可被设置成early、late、early-late和dithered这几种模式。在Namuru中,正如之前提到的那样,具有3个复合相关器early、prompt和late,每个相关器都占用半块芯片。对于运行在MG5001上的Architect,prompt和tracking用以产生相关能量,而跟踪设置为early。对已运行在Namuru上的Architect,这三个复合相关器都用于产生码相关运算的能量。
对于运行在MG5001上的Architect,在相关峰值成功检测到之前,跟踪转换到early – late模式并且相关能量由以下公式得到:
(2)
其中IP和QP分别为prompt分支的同步和正交。
低通滤波器用来滤除噪声。在Namuru平台上运行的Architect也使用同样的公式来得出之前的检测码相关能量。
载波锁相通过使用公式中的prompt分支得出:
(3)
其中IP-1和QP-1都是之前一个时间点所采集的数值。同样,此处也需要一个低通滤波器来滤
除噪声。
Architect所使用的跟踪环路是载波跟踪的频率锁相环(FFL)以及一个拥有码跟踪辅助的延时锁相环。为了将不同的数字控制振荡器的数据宽度以及20MHz(GP2021/GP4020为40/7 MHz)的累积采样率考虑进去,Namuru所需要的环路软件需要进行一些修改。其中,FFL使用向量积鉴别器。
(4)
码跟踪换使用dot-product鉴别器,对于MG3001上的Architect,可以用以下公式给出:
(5)
其中,IT和QT是early – late分支下的同相和正交,IP和QP是prompt分支下的同相和正交。
对于运行在Namuru平台上的Architect,dot-product鉴别器通过以下公式给出:
(6)
基于以上原因,有必要对软件进行一些修改。在这里,区分先后两个版本就取决于一个芯片,即比较分隔半个芯片的GP2021/GP4020。芯片分隔会影响跟踪性能,在一定程度上,越近性能越好(参见[10]375页)。
跟踪环滤波参数的调整可以提高特定应用下的跟踪性能,比如,环路参数可被调谐成已知交通工具的动态性能。相关能量的阈值同样可以被调谐以选择一个能满足特定应用的敏感性和误锁定的的折中数值。本文接下来将会对载波及码跟踪环路进行讨论。
静态测试
Namuru和Signav MG5001接收器通过分路器连接到位于新南威尔士州大学电气工程楼顶的天线上。两个接收器都运行Architect软件的一个变量。经过一系列尝试之后将数据采集到,采集的结果见[4]。表1中为其中一项测试的总结结果。图5和图7为水平散布图。从这些测试中得到的主要结论是这两种接收机的静态测试性能几乎没有差别。另外,我们可以看到Namuru接收机在进行大部分基本位置计算时都能够正确地运行。
表1 静态测试结果(17小时)
图5 Namuru水平误差(17小时)
图6 实验设置
图7 MG5001水平误差(17小时)
动态测试
在动态情况下的测试是在使用斯伯伦公司的GSS6560多通道GPS仿真器提供射频信号下进行的。Namuru和Signav MG5001接收机通过分路器连接到斯伯伦的输出端,并且对这两个变量分别运行Architect软件。设置步骤参见图6。
我们为测试创建了两种情境。第一种情境是一辆车沿着直线轨道以变化的加速度运动的仿真。第二种是一架飞机在固定的高度上以恒定速度作圆周运动,向心加速度不变的仿真。这两种情境都非常便于计算水平和高度误差。我们采集了许多数据集,并介绍了每种情境下有代表性的
一个数据集。
图8
图9 MG5001的高度误差
表2 直线情况下的动态测试结果(3518 epochs)
直线情境下是以几分钟的地址速度开始的以保证接收器能都在数据采集之前获得PVT数据。然后沿着轨道加速度可加至20ms-2 (~2G)。圆周运动情况下提供固定的向心加速度16ms-2 (~1.6G)。接收机在记录数据之前根据给定的时间启动。该测试运行时间为1小时。从图12和图15中可见,这两个接收机均可提供看起来可以接受的轨迹图,没有严重误差。表格3和图13、图14、图16、图17表明Namuru的跟踪效果不如MG5001。
图10 Namuru直线情况下的水平误差
图11 Namuru直线情况下的水平误差
这两项动态测试表明Mamuru的跟踪性能并不如MG5001。一个原因是Namuru的环路参数并没有设置准确,在Architect团建中的跟踪环路并没有根据Namuru的NCO的宽度以及加速度采样率的不同作相应的修改。这个问题目前还没有得到解决并且值得Namuru的性能接近MG5001的工作还在进行中。下面会对Architect中实行的跟踪环路作一番讨论。
图12 MG5001圆周运动情况下图13 MG5001圆周运动情况下的水平误差
图14 MG5001圆周运动情况下的垂直误差
表3 圆周运动情况下的测试结果(3518 epochs)
图15 Namuru圆周运动情况图16 Namuru圆周运动情况下的水平误差
图17 Namuru圆周运动情况下的垂直误差
ARCHITECT中的跟踪环
Architect软件包含能够进行倍乘和除法的移位单元一降低处理器的负担,以及数据的缩放以保持载波和码跟踪软件的精度。如果缺少注释,将很难仅仅从源代码理解这些环路。在这个部分,载波和码跟踪环路将得到测试。
图18 关于I和Q的复平面
Architect使用一个FFL进行载波跟踪。使用了向量积鉴别器(公式4)并且环路滤波器是一个二阶的带宽为1Hz的Jaffe-Rechtin滤波器(见[11 12])。载波环路关闭后,相位的变化(Δφ, 见图18)
将被鉴相器检测出来并反馈至环路滤波器并产生载波NCO的一个修正值出现在另一端。以下两个公式代表环路滤波器;
其中,ω是载波频率,为当前时间,T为采样间隔(1ms),ωnF为自然环路频率,f t为由信号能量正常化的向量积鉴别器,它在一定的采样间隔提供Δφ的测量值。
公式7可化简为
其中
B LF是滤波器带宽:1Hz
公式8可写成
这些值都是供公式9使用的:
公式9中的Δω值(弧度)被缩放以转换成NCO_units从而对NCO进行更新。频率和NCO控制字的关系通过以下关系给出:
NCO的转换增益(单位Hz/NCO_units)如下
通过以下公式转换成弧度/ econd-NCO_unitsd单位
其中,N为NCO的位宽,f o为期望频率,f c为时钟频率(GP2015/GP4020为40/7MHz、Namuru 为40MHz )。对于载波NCO,GP2021/GP2040为27位宽,Namuru为30位宽。
Architect软件中的能量正常化值固定在高于噪声基准5dB。实值随着信号强度而变化。对于Namuru,噪声基准通过实验测得并用来提供能量正常化值。要产生合适的正常化值以提高载波跟踪性能还有很多工作要做,
码跟踪在载波的帮助下通过一个一阶的DLL完成。点积早-晚鉴别器正如公式5、6给出的那样进行使用。根据通过鉴别器的增量(Kφ)缩放时,可在芯片中得到一个本地伪随机噪声序列和卫星伪随机噪声序列的时延(相位差)。当码跟踪环路关闭时,芯片中鉴相器估计的码时延以及FFL 中缩放得到的载波频率将进入环路滤波器,成为NCO的一个更新值(NCO_units单位)从另一端出来。关于环路滤波器设计的描述见[11]。
码频率的变化如下:
其中,BLC是带宽(1Hz),T为时间间隔(1ms),e为由Kφ定标的鉴别器,?θ为载波频率辅助单元,r是载波至码的比例因子(1575.42/1.023)。t软件中使用的值见括号。公式13可写成
在Architect软件中,NCO的修正值是在NCO_units单位下计算出来的。码NCO宽度
GP2021/GP4020为26,Namuru为29。
Kφ是将迟早相关器和信号能量分割开的芯片功能。在Architect软件中,信号能量固定在噪声门限之上16dB。
敏感性测试
为了感知Namuru接收机的敏感性能,我们做了一些测试以确定能量多少的DPS信号能够被捕获到。GPS ICD中说L1信号的最小能量为-160dBw (-130dBm) (参见[13])。这个最低值是卫星在地平线上的值。然而一般情况下,卫星在高海拔时,信号强度总在-154dBw甚至更高(see [14])。另外,Signav MG5001接收机上运行Architect软件可以很方便地与之进行对比。这两种接收机的硬件设计都比较传统,不包含捕获低能量信号的搜索引擎。GPS Architect软件也非常传统,它也没有关于低能量信号采集和跟踪的技术。
斯伯伦公司的GPS仿真器设置为产生一个单通道的能量值可调的信号。这两个接收机都通过分路器连接到斯伯伦上并对一系列能量值进行了测试。测试方法如下:先将斯伯伦设定为一个能量值,然后两个接收机均复位以进行能共捕获(码、载波、位和帧锁)。将每个接收机五次捕获中成功的捕获的序号记录下来。载波多普勒频移通过斯伯伦进行选择以使得载波在两个接收机中心500Hz宽度之内,考虑到由本地TCXO产生的旧手机频率偏移,结果见图7。
需要说明的是这项测试只是用来检测Namuru是否可以正确操作,并不是一个彻底的分析。调整捕获的门限值可以改变灵敏性,但是,正如之前所说,灵敏度与码锁定的错误率之间需要进行权衡。Signav MG5001的门限值使用的是GPS Architect软件中的缺省值,而Namuru的门限值则是通过实验测得的。我们可以注意到从码/载波/位锁定转换到全部锁定(码/载波/相位/帧锁定)Namuru所需要的时间比Signav MG5001要厂。目前我们还不清楚为什么会这样。但是,可以看出运行GPS Architect软件两者的敏感性能是类似的。
图19 灵敏度测试
Architect软件通过以下公式计算载噪比:
其中:
LPF是一个低通滤波函数,其噪声门限MG5001为97142,Namuru为1000000.
常量+30是一个经验调整值以保证创建出正确范围的值,它在理论中是不存在的。
表格4给出了这两种连接到屋顶天线以及斯伯伦信号仿真器的接收机(单通道)的一些快速捕获的载噪比数据的一些例子。一般情况下,两者的复合度非常好。但是准确性还有待研究。
表4 不同信号下的载噪比值
接下来的工作
近期将主要关注在提高跟踪环路上。为提高了的载波相位测量增加了进行载波跟踪的锁相环。针对Namuru接收机可以面对更管饭应用的软件在正在开发中。由于GPS Architect软件为Namuru提供的开发工具包难以获得并且灾区的序列号的情况下也只可发布二进制文件,因此使得该软件在科研上的使用得到了限制。Namuru也存在一些其他的应用软件;其中一个就是
GPL-GPS项目中的port软件(见[16 17])。另一个就是使用可以获得的开源组件来开发新的应用软件。
对于基带处理器的开发我么你也有了计划。首要的改变也许就是两个复合相关器之间实现更小距离。这个修改将提高码跟踪的准确性。
一块具有增强功能的开发板正在设计中,更加详细的信息参见Namuru官方网站(参见[7])。
总结
本文介绍了开源的Namuru GNSS研究平台,包括设计概览、跟踪环路的详情以及测试手段及结果。测试表明,要使Namuru达到Signav MG5001的性能,还有很多工作要做。两个接收机的灵敏度类似。最终,接下来的研究开发领域主要在三个方面:软件(开源及跟踪环路)、基带(更小的相关器距离)以及新的电路板设计。
参考文献
[1] Signav, 2005. MG5000 Series GPS Receiver User Guide, MG5-200-GUIDS-User Guide-B.T11 https://www.doczj.com/doc/ad14850320.html,.au
[2] ENGEL, F., HEISER, G., MUMFORD, P., PARKINSON, K., & RIZOS, C., 2004. An open GNSS receiver platform architecture.Journal of GPS, 3(1-2), 63-69.
[3] MUMFORD, P., PARKINSON, K., & ENGEL, F., 2006. An open GNSS receiver platform architecture. Coordinates, 2(1), 28-31.
[4] MUMFORD, P., PARKINSON, K., DEMPSTER, A. 2006. An Open GNSS Receiver Research Platform. Symp. on GPS/GNSS, Surfers Paradise, Australia, 17-21 July.
[5] PARKINSON, K., DEMPSTER, A.G., MUMFORD, P., & RIZOS, C., 2005. FPGA based GPS receiver design considerations. Int. Symp. On GPS/GNSS, Hong Kong, 8-10 December, paper 8C-05, CD-ROM procs.
[6] PARKINSON, K., DEMPSTER, A., MUMFORD, P., RIZOS, C. 2006. Improving signal quality in FPGA
based GPS receiver designs. Symp. on GPS/GNSS, Surfers Paradise, Australia, 17-21 July.
[7] Namuru FPGA GPS tracking module Data Sheet, Issue 1.1 2006, https://www.doczj.com/doc/ad14850320.html,/gpsreceiver/
[8] GPS Builders Designers Guide (1994) GEC Plessey Semiconductors GPS Group.
[9] GPS Architect 12 Channel GPS Development System (1997) Mitel Semiconductor
[10] VAN DIERENDONCK, A. J., ‘GPS receivers’in ‘Global Positioning System: Theory and Applications’vol. 1, PARKINSON, B., SPILKER, J. (Eds.), 1996 American Institute of Aeronautics and Astronautics, Inc.
[11] CAHN, C.R., LEIMER,D.K.,MARSH,C.L., HUNTOWSKI, F.J., LARUE,G.D., ‘Software Implementaion of a PN Spread Spectrum Receiver to Accommodate Dynamics’, IEEE Trans. On Communications COM-25, No. 8, pp. 832-939 1977.
[12] JAFFE, R., RECHTIN, E., ‘Design and Performance of Phase- Locked Circuits of Near-Optimum Performance Over a Wide
Range of Input Signals and Noise Levels’, IRE Trans. On IT, Vol IT-1. March 1965, pp. 66-72.
[13] ARINC, NAVSTAR GPS Space Segment/Navigation User Interfaces, IS-GPS-200D, ARING Research Corporation, Fountain Valley, Ca, December 7, 2004.
[14] SPILKER, .J, ‘GPS Signal Structure and Theoretical Performance’in ‘Global Positioning System: Theory and Applications’vol. 1, PARKINSON, B., SPILKER, J. (Eds.), 1996 American Institute of Aeronautics and Astronautics, Inc.
[15] WARD, P.W, ‘Satellite Signal Acquisition, Tracking and Data Demodulation’in KAPLAN E.D. (Ed), ‘Understanding GPS: principals and applications’, Artech House, 1996, Chap. 5
[16] GPL-GPS project, web pages at URL https://www.doczj.com/doc/ad14850320.html,/
[17] Open Source GPS, web pages at URL https://www.doczj.com/doc/ad14850320.html,/tebinuma/osgps/index.html