
文章编号:1001-2354(2002)05-0021-03
平面五杆机构类型判别方法的研究
李辉,张策,孟宪举
(天津大学机械工程学院,天津 300072)
摘要:提出并验证了平面二自由度五杆机构双曲柄存在的充要条件,提出平面五杆机构的类型不仅与五杆机构的杆长有关,而且还与机架和原动件的选取有关。平面五杆机构若满足:L max+L min1+L min2 a+b(其余两杆的长度和),且当一个短杆为输入连架杆,而另一个短杆为机架或另一输入连架杆时,则该五杆机构必存在双曲柄。
关键词:五杆机构;机构设计;曲柄
中图分类号:T H122 文献标识码:A
随着机械产品创新设计的发展,平面连杆机构的设计已经不仅局限于传统的单自由度四杆机构,平面多自由度机构已广泛应用于并联机器人、串联机械手等领域,以实现高精度的运动输出或完成更复杂的运动规律。近年随着可控机构研究的发展,国内外学者对平面五杆机构的分析与综合进行了大量的研究,但对平面五杆机构类型的判别方法的研究还很不全面和完善,还没有提出一个比较简便、适用的判别方法[1~4]。作者在对平面五杆机构构型进行了系统分析的基础上,在保证平面五杆机构不出现死点位置的前提下,提出了类似于平面四杆机构的Grashof准则,并用此准则对平面五杆机构进行了分类,最后还分析了平面RRRRP五杆机构曲柄存在的条件。
1 平面5R五杆机构存在曲柄的
杆长条件及其分类
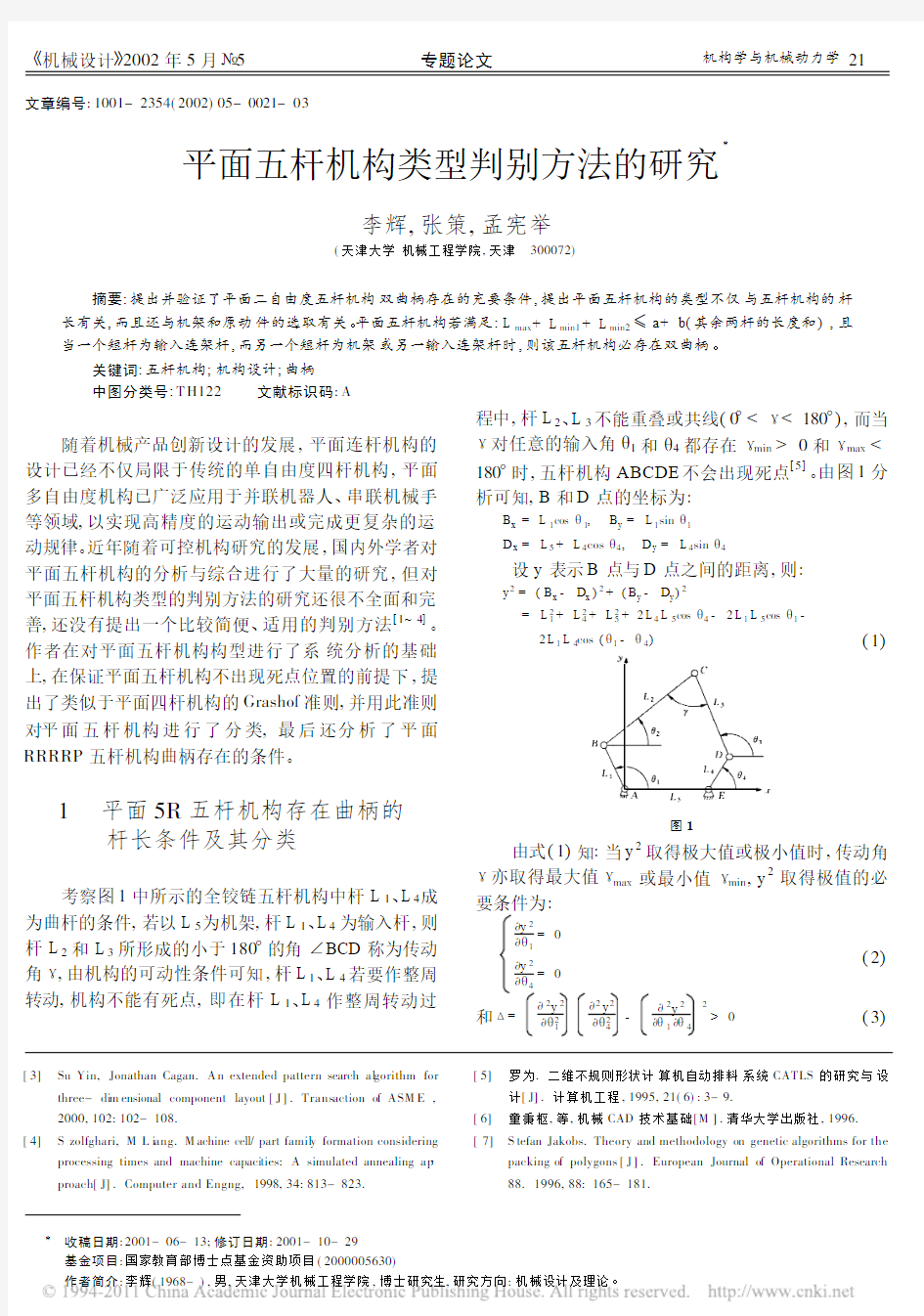
考察图1中所示的全铰链五杆机构中杆L1、L4成为曲杆的条件,若以L5为机架,杆L1、L4为输入杆,则杆L2和L3所形成的小于180的角!BCD称为传动角 ,由机构的可动性条件可知,杆L1、L4若要作整周转动,机构不能有死点,即在杆L1、L4作整周转动过程中,杆L2、L3不能重叠或共线(0< <180),而当 对任意的输入角 1和 4都存在 min>0和 max< 180时,五杆机构ABCDE不会出现死点[5]。由图1分析可知,B和D点的坐标为:
B x=L1cos 1, B y=L1sin 1
D x=L5+L4cos 4, D y=L4sin 4
设y表示B点与D点之间的距离,则:
y2=(B x-D x)2+(B y-D y)2
=L21+L24+L25+2L4L5cos 4-2L1L5cos 1-
2L1L4cos( 1- 4)(1
)
图1
由式(1)知:当y2取得极大值或极小值时,传动角 亦取得最大值 max或最小值 min,y2取得极值的必要条件为:
y2
1=0
y2
4=0
(2)和!=
2y2
21
2y2
24-
2y2
1 4
2
>0(3)
[3] Su Yin,Jonathan Cagan.An extended pattern search al gorithm for
three-di m ensional component layout[J].Trans action of ASM E, 2000,102:102-108.
[4] S zolfghari,M L i ang.M achine cell/part famil y formation considering
processing times and machine capaci ties:A simulated annealing ap proach[J].Computer and Engng,1998,34:813-823.[5] 罗为.二维不规则形状计算机自动排料系统CATLS的研究与设
计[J].计算机工程,1995,21(6):3-9.
[6] 童秉枢,等,机械CAD技术基础[M].清华大学出版社,1996.
[7] S tefan Jakobs.Theory and methodology on genetic algorithms for the
packing of polygons[J].European Journal of Operational Research
88.1996,88:165-181.
21
?机械设计#2002年5月?5专题论文机构学与机械动力学
收稿日期:2001-06-13;修订日期:2001-10-29
基金项目:国家教育部博士点基金资助项目(2000005630)
作者简介:李辉(1968-),男,天津大学机械工程学院,博士研究生,研究方向:机械设计及理论。
再对式(1)两边分别对 1、 4求偏导数得:
y
2
1
=2L 1L 5sin 1+2L 1L 4sin ( 1- 4)(4) y 2
4
=-2L 4L 5sin 4-2L 1L 4sin ( 1- 4)(5) 2y 2
21=2L 1L 5cos 1+2L 1L 4cos ( 1- 4)(6) 2y 2
24=-2L 4L 5cos 4+2L 1L 4cos ( 1- 4)(7) 2y 2
1 4
=-2L 1L 4cos ( 1- 4)
(8)由式(2)、(4)、(5)可得:
L 1si n 1-L 4sin 4=0
(9)sin 1(L 5+L 4cos 4-L 1cos 1)=0(10)
式中:L 5+L 4cos 4-L 1cos 1%0。
则由式(9)、(10)可得:sin 1=si n 4=0,即当( 1, 4)=0 或180 时,传动角 取得极值。当 1=180 , 4=0 时,传动角 取得最大值 max ;而 m i n 则根据机构的尺寸可能出现在( 1, 4)=(0 ,180 ),(0 ,0 ),(180 ,180 )3处,下面分别加以讨论:
(1)当 1=180 , 4=0
时,如图2所示:在 BCD 中,根据三角形两边之和大于第三边;两边之差小于第三边,及杆长关系可得:
L 2-L 3 L 1+L 4+L 5 L 2+L 3(11)(2)当 1=0 , 4=180 时,如图3所示,由式(3)~式(8)可得:
!=4L 1L 4L 5(L 5-L 1-L 4)>0
所以:L 5>L 1+L 4成立,则可得下式:
L 2-L 3 L 5-L 1-L 4 L 2+L 3
(12
)
图2 图3
(3)当 1=0 , 4=0 时,如图4所示,由式(3)~式(8)可得:
!=4L 1L 4L 5(L 1-L 4-L 5)>0
所以:L 1>L 4+L 5成立,则可得下式:
L 2-L 3 L 1-L 4-L 5 L 2+L 3(13)
(4)当 1=180 , 4=180 时,如图5所示,由式(3)~式(8)可得:
!=4L 1L 4L 5(L 4-L 1-L 5)>0
所以:L 4>L 1+L 5成立,则可得下式:
L 2-L 3 L 4-L 1-L 5 L 2+L 3
(14)
设:
L =max (L 1,L 4,L 5)L min =(L 1+L 4+L 5)-L
则由式(11)可得:
L +L min L 2+L 3
(15)
很显然由式(12)~式(14)可得:
L -L min & L 2-L 3
(16)
且当L 、L 2、L 3分别为最长杆L max
时,式(15)、
(16)可以改写为:
当L max =L 时,有:L max +L min L 2+L 3或当L max =L 2时,有:L max +L min L +L 3或当L max =L 3时,有:L max +L min L +L 2
(17)
在式(15)、(16)和式(17)中隐含了L 、L 2、L 3均比其它两杆的和L m i n 大,而且L 、L 2、L 3其中之一必为最长杆L max ,设L max 、L m i n1、L m i n2、a 和b 分别表示五杆中的最长杆、最短杆、次短杆和其它两杆的长,即有下式成立:
L max &a ,b &(L min1+L min2)(18)因此式(17)可改写为:L max +L min1+L min2 a +b (19)我们把满足式(19)的平面五杆机构称为?类机构,把不满足式(19)的称为(类机构,式(19)即为平面铰链五杆机构存在双曲柄的杆长条件。
图4 图5
2 双曲柄存在的充要条件
平面铰链五杆机构的机构类型不仅与五杆相对杆长有关,而且与机架、原动件的选取有关。根据机构各杆件间的相对运动关系的原理,若某一杆件相对于它的邻杆可以作周转,则该杆件为曲柄。考虑到所有可能的情况,对?类机构,我们发现两个较短杆都能相对于它的邻杆作周转。因此,当我们把两个短杆中的任何一个与它的邻杆在任意位置刚性连接时(见图6的阴影部分),就构成一个虚拟Grashof 四杆机构,该虚拟四杆机构最多可能有两个曲柄,因此,?类机构最多可以有3个曲柄,所以,由以上分析我们可以得出以下结论:
2.1 对?类机构
(1)当L min1(或L min2)为机架,L min2(或L m i n1)为输入杆时,平面铰链五杆机构为三曲柄机构(见实例1)。
(2)当最短杆L min1和次短杆L min2为两个输入杆时,平面铰链五杆机构为双曲柄机构(见实例2)。
(3)当短杆L min1(或L min2)为机架或输入杆,而另一个最短杆L min2(或L min1)不为输入杆或机架时,平面铰链五杆机构为单曲柄机构。
22 机构学与机械动力学
专题论文
?机械设计#2002年5月?5
当条件(1)、(2)、(3)不成立时,平面铰链五杆机构无曲柄存在。2.2 对(类机构
(类机构为单曲柄或无曲柄存在的平面铰链五杆机构。
因此,由以上分析我们可以归纳得到平面五杆机构存在双曲柄的充要条件为:
(1)一个短杆为输入杆,而另一个短杆为机架或另一输入杆;
(2)两个短杆与最长杆长度之和小于其它两杆长度之和。
这就是平面铰链五杆机构双曲柄存在的判据。
3 实例分析
为了验证上述结论的正确性,我们举例并用平面
四杆机构的Grashof 准则来对上述结论进行验证:
实例1:(L 1)L 2)L 3)L 4)L 5)=(10)21)19)20)5)一个最短杆L min1=5为机架,而另一次短杆L min2=10为输入杆(图6)。当AB 杆绕铰链A 转动时,则不论A B 杆处在任何位置上时,连接BE ,则BCDE 构成一个虚拟平面四杆机构,BE 的变动范围是|L 1-L 5| BE L 1+L 5时,当以BE 为机架,DE 为输入杆,由平面四杆机构Grashof 准则知,杆DE 和杆BC 一定为曲柄,亦即虚拟平面四杆机构BCDE 为双曲柄机构,因此该机构为三曲柄机构,其中杆AB 和杆DE 为输入曲柄,杆BC
为连杆曲柄。
图6
实例2:(L 1)L 2)L 3)L 4)L 5)=(5)20)22)13)21)(图
7)
最短杆L min1=5和次短杆L min2=13都为输入杆,AE 为机架,则连接BE 构成一虚拟四杆机构BCDE ,由于DE 为最短杆,且|L 1-L 5| BE L 1+L 5,当以BE 为机架,DE 为输入杆,由平面四杆机构Grashof 准则知,杆DE 一定为曲柄,而杆BC 为摇杆,亦即虚拟四杆机构BCDE 为曲柄摇杆机构,因此该机构为双曲柄机构,即杆AB 和杆DE 为输入曲柄。
4 平面RRRRP 五杆机构的
曲柄存在条件
图8所示的平面RRRRP 五杆机构,当以杆1和滑块为运动输入杆时,则考虑当L 2和L 3重合在一起时(如图9),则由A BD 组成的虚拟四杆机构存在曲柄的条件为:
L 2-L 3 &L 1(20)
图8 图9
当满足上述条件时,则无论杆2、杆3在任何位置,杆1均为曲柄,此即为平面RRRRP 五杆机构存在曲柄的条件。
5 结论
本文从平面五杆机构不出现死点位置出发,导出了平面五杆机构存在曲柄的杆长条件,并验证了平面5R 五杆机构双曲柄存在的判据,从而得出了与平面四杆机构Grashof 相类似的判据。可以看出,平面5R 五杆机构双曲柄存在的判据是平面四杆机构Grashof 判据的推广,该判据简单明了,具有较高的使用价值。最后还对平面RRRRP 五杆机构曲柄存在条件进行了分析。
参考文献
[1] 李佳,钮国辉,廖汉元.五杆两自由度机构可动性的充分条件[J ].
武汉冶金科技大学学报,1998,21(9):329-332.
[2] 徐轶群,万隆君,黄茂林.平面闭链五杆二自由度机构曲柄存在的
条件及分类[J].机械传动(增刊),1996,(20):42-44.
[3] 田汉民,张策,张新华.二自由度平面五杆机构的双曲柄存在条件
[J].机械设计,2001,18(3):23-25.
[4] 陈瑞芳,马履中.平面五杆机构曲柄存在条件及机构类型的判别
方法[J].江苏理工大学学报,1998,19(1):84-87.
[5] 周洪,邹慧君,王石刚.混合输入型五杆轨迹机构的分析与设计
[J].上海交通大学学报,1999,33(7):865-869.
23
?机械设计#2002年5月?5专题论文
机构学与机械动力学
2002-05-01 Study and development of software system for schem es generative technigue of conceptual design of mechani cal products
SONG Hui-jun et al(CI M Institute,X i?an Jiaotong U niver sity,Shanx i Xi?an,710049,China)
Abstract:Schemes generation of conceptual design is reguar d ed as the most crucial technique in conceptual desig n of pro ducts, and it is the most important facto r in deter mining the final quality of product,competitive ability in mar ket and enterpr i se?s profits acqui sition.Based on theory of ax iomatic design,this paper dis cussed the key techniques and strategy of realizatio n for scheme g eneration of conceptual design of mechanical products and intro duced the development o f corresponding software system.
Key words:Conceptual design,Ax iomatic design,Schemes g eneration,So ftw are system
Fig5T ab0Ref5+Jix ie Sheji,1323 2002-05-04 A research on integrated model of life-cy cle oriented g reen product
JIANG Ji-bin et al(School of M echanical&A utomobile Engineering,Hefei P olytechnic U niversity,Anhui Hefei,23009, China)
Abstract:T he establishment of integrated model of gr een product is the premise to the development o f life-cy cle oriented g reen product.On t he basis of analyzing the infor mation o f life-cycle of green pro duct,this paper put forw ar d a multi-view inte gr ated model on the basis of product?s str ucture.By means of info -mapping from front view to applicational view,the information r equirement of each enable tool in the life-cycle can be fulfilled, and the properties of difference and of relevance for applicational information are maintained at the same time.T he concrete think ing of implementation is advanced to the realization of t hat model system.
Key words:G reen product,Integrated model,Product model ing,Integ rated development of product
Fig3T ab0Ref10+Jix ie Sheji,1459 2002-05-07 C ollaborative designing method of distribut ed modularization
X IE Hong-chao et al(State K ey L aboratory of T ribolo gy, Depar tment of P recision Instrument&M echanolog y,T sing hua U niversit y,Beijing,100084,China)
Abstract:T his paper put forward an open and distr ibuted col labo rative mechanical propert y desig n env ironment(DCM DE).T he system adopted a distributed module technique to carr ying out model construction of the desig ning issues.Each module represents one designing sub-issue or one subject?s aspect of an issue.Every module uses a met hod of object oriented technique to encase the da ta and provides services for users and other modules t hrough Web interface.Ev er y design module could share the data of product?s information model within DCM DE and communicatio n and ex change of designing infor mation can be car ried out by means of model of pro duct information,thus ensured t he consistency of pro d uct?s data in collabor at ive design.T he system adopted a confidence -based method o f conflict coordinatio n to harmonize conflicts be tw een differ ent subjects.A living ex ample of gear box collabor at ive design showed the effectiveness and practicality of this system.
Key words:Collabo rative design,Di stributed,Design module, Web based
Fig6T ab0Ref8+Jix ie Sheji,1374 2002-05-11 General mechanics model and deformation equations of variable-stif fness statically indeterminate beam un der complex load
LI Xue-jun et al(Institute of Vibration Impact&Diagno si s,Xiang tan Polytechnic U niversit y,Hunan X iangtan,411201, China)
Abstract:In this paper,a kind of g ener al mechanics model of v ar iable-stiffness statically indeter minate beam under complex load has been established,and t he equations of bending moment at arbitrary section o f the beam are obtained.T he general equations of r otat ion ang le and flex ibility deformation at arbit rar y section of beam w er e der ived by means of the integr al to bending moment e quations and the iteration of the equations after integration.A nd t he living co mputational ex ample of engineering was given.T hese equations are easily processed by computers,thus provided a foun datio n for programmed solution of t he variable-stiffness statically indeterminate beam under complex load.
Key words:Complex load,Var iable-stiffness,Statically in determinate beam,Mechanics model,Deformation equation Fig3T ab0Ref6+Jix ie Sheji,1298 2002-05-18 The research and design of automatic layout system f or2D irregular polygons
DUAN Guo-lin et al(Institute of CAD/CAM&RPM, Hebei U niversity o f T echolo gy,T ianjin,300130,China)
Abstract:L ayout issues stem from many domains of modern production and show off in many forms.But it is quite difficult to make solutions by t he use of tranditional optimum algor ithm ow ing to t his issue belo ngs t heoretically to N P complete(nondeter ministic polynomial time complete)problem.T his paper discussed the idea and designing technique for automatic layout system of2D irregular polyg on and carried out an analysis on the searching method of simulated annealing algorithm.A n ordinary searching model i s pre sented.I n view o f the concr ete situation of ir reg ular polygons,a discussion i s made upon its judg ement of intersectio n and other re str aint conditions.
Key words:M ethod of simulated annealing,Layout,Opti mization design,Ir regular polygo n
Fig5T ab0Ref7+Jix ie Sheji,1318 2002-05-21 A study on the judging method of type of planar five-bar linkage
LI Hui et al(School of mechanical Engineer ing,T ianjin U ni versity,T ianjin,300072,China)
Abstract:T he sufficient and necessary conditio ns for the ex is tence of double crank of planar five-bar linkage w ith two degree of freedo m are adv anced and v er ified.It is also advanced that the t ype of planar five-bar linkag e is related not only to the rod length of five-bar linkage but also to the selection of frame and motive co mponent.If t he fiv e-bar linkage sat i sfies:L max+L min1 +L min2 a+b(Sum of leng th of t he o ther two bars),and while a shor t bar acts as an inputting rod connected to t he fr ame,and at t he same t ime ano ther short bar ser ves as the frame or another in putting rod connected to the frame,thus the double cr ank of the five-bar linkag e w ill certainly exist.
Key words:F ive-bar linkage,Desig n of mechanism,Cr ank
Fig9T ab0Ref5+Jix ie Sheji,1365 2002-05-24 Optimum moving angles of push travel and return travel optim um{?0,??0}and its solving m ethod for conical cam mechanism with translating follower
C HANG Yong et al(M echanical Eng ineering Institute,Jimei U niversity,F ujian Xiamen,361021,China)
Abstract:U nder t he situatio n of the sum of moving ang les of push travel and o f return tr av el to be a constent,?0+??0=C(con stant),t here w ill certainly ex ist an optimum distr ibution of a cer tain pair of moving angle of push travel and r eturn travel opt imun {?0,??0}.When this opt imum distribution is being selected,the r adius of base cir cle r0of co nical cam with translating follow er w ill g ain its minimum v alue r0min.On the basis of discovering and re vealing the above stated fact,this paper studied and settled the ana lytical method of solving the minimum v alue of base cir cle radius of conical cam with translating follow er r0min according to t he condi tion of allowable pr essure angle w hen the optimum distribution o p timum{?0,??0}is being selected.
Key words:Conical cam mechanism,Base circle radius,M ov ing ang le of push travel,Mo ving angle of r eturn travel,Optimum distr ibut ion
Fig2T ab0Ref7+Jix ie Sheji,1210
(ABSTRAC TS.Jix ie Sheji.2002?5
第八章平面连杆机构及其设计 一、填空题: 1.平面连杆机构是由一些刚性构件用转动副和移动副连接组成的。 2.在铰链四杆机构中,运动副全部是低副。 3.在铰链四杆机构中,能作整周连续回转的连架杆称为曲柄。 4.在铰链四杆机构中,只能摆动的连架杆称为摇杆。 5.在铰链四杆机构中,与连架杆相连的构件称为连杆。 6.某些平面连杆机构具有急回特性。从动件的急回性质一般用行程速度变化系数表示。 7.对心曲柄滑块机构无急回特性。 8.平行四边形机构的极位夹角θ=00,行程速比系数K= 1 。 9.对于原动件作匀速定轴转动,从动件相对机架作往复直线运动的连杆机构,是否有急回 特性,取决于机构的极位夹角是否为零。 10.机构处于死点时,其传动角等于0?。 11.在摆动导杆机构中,若以曲柄为原动件,该机构的压力角α=00。 12.曲柄滑块机构,当以滑块为原动件时,可能存在死点。 13.组成平面连杆机构至少需要 4 个构件。 二、判断题: 14.平面连杆机构中,至少有一个连杆。(√) 15.在曲柄滑块机构中,只要以滑块为原动件,机构必然存在死点。(√) 16.平面连杆机构中,极位夹角θ越大,K值越大,急回运动的性质也越显著。(√) 17.有死点的机构不能产生运动。(×) 18.曲柄摇杆机构中,曲柄为最短杆。(√) 19.双曲柄机构中,曲柄一定是最短杆。(×) 20.平面连杆机构中,可利用飞轮的惯性,使机构通过死点位置。(√) 21.在摆动导杆机构中,若以曲柄为原动件,则机构的极位夹角与导杆的最大摆角相等。 (√) 22.机构运转时,压力角是变化的。(√) 三、选择题:
23.铰链四杆机构存在曲柄的必要条件是最短杆与最长杆长度之和 A 其他两杆之和。 A ≤ B ≥ C > 24.铰链四杆机构存在曲柄的必要条件是最短杆与最长杆长度之和小于或等于其他两杆之和,而 充分条件是取 A 为机架。 A 最短杆或最短杆相邻边 B 最长杆 C 最短杆的对边。 25.铰链四杆机构中,若最短杆与最长杆长度之和小于其余两杆长度之和,当以 B 为机架时, 有两个曲柄。 A 最短杆相邻边 B 最短杆 C 最短杆对边。 26.铰链四杆机构中,若最短杆与最长杆长度之和小于其余两杆长度之和,当以 A 为机架时, 有一个曲柄。 A 最短杆相邻边 B 最短杆 C 最短杆对边。 27.铰链四杆机构中,若最短杆与最长杆长度之和小于其余两杆长度之和,当以 C 为机架时, 无曲柄。 A 最短杆相邻边 B 最短杆 C 最短杆对边。 28.铰链四杆机构中,若最短杆与最长杆长度之和 B 其余两杆长度之和,就一定是双摇杆 机构。 A < B > C = 29.对曲柄摇杆机构,若曲柄与连杆处于共线位置,当 C 为原动件时,此时机构处在死点位 置。 A 曲柄 B 连杆 C 摇杆 30.对曲柄摇杆机构,若曲柄与连杆处于共线位置,当 A 为原动件时,此时为机构的极限 位置。 A 曲柄 B 连杆 C 摇杆 31.对曲柄摇杆机构,当以曲柄为原动件且极位夹角θ B 时,机构就具有急回特性。 A <0 B >0 C =0 32.对曲柄摇杆机构,当以曲柄为原动件且行程速度变化系数K B 时,机构就具有急 回特性。 A <1 B >1 C =1 33.在死点位置时,机构的压力角α= C 。 A 0 o B 45o C 90o 34.若以 B 为目的,死点位置是一个缺陷,应设法通过。 A 夹紧和增力B传动 35.若以 A 为目的,则机构的死点位置可以加以利用。 A 夹紧和增力;B传动。
第三讲 课题:§3-1 平面四杆机构的基本类型及其演化 教学目的:理解平面四杆机构的各种类型及其应用。 教学重点:铰链四杆机构类型及其演化,理解曲柄存在条件。 教学难点:导杆机构 教学方法:课堂演示、多媒体 教学互动:每个知识点后提问或讨论。 教学安排: §3-1 平面四杆机构的基本类型及其演化 复习旧课:机构组成,运动副,运动简图等。 平面连杆机构是常用的低副机构,其中以由四个构件组成的四杆机构应用最广泛,而且是组成多杆机构的基础。因此本章着重讨论四杆机构的基本类型、性质及常用设计方法。 一、四杆机构的类型 1.曲柄摇杆机构 两连架杆一为曲柄,一为摇杆。 功能:将等速转动转换为变速摆动或将摆动转换为连续转动。 应用:雷达天线机构、缝纫机踏板机构。 2.双曲柄机构 两连架杆都为曲柄 功能:将等速转动转换为等速同向、不等速同向、不等速反向转动。 应用:惯性筛机构 若两曲柄的长度相等,连杆与机架的长度也相等,则该机构称为平行双曲柄机构。如铲斗机构
还有反平行四边形机构,例:公共汽车车门启闭机构。3.双摇杆机构 两连架杆都为摇杆 功能:一种摆动转换为另一种摆动。 应用:鹤式起重机、飞机起落架 二、铰链四杆机构的曲柄存在条件 证明: 结论:铰链四杆机构存在一个曲柄的条件是: 1.最短杆与最长杆长度之和小于或等于其余两杆长度之和。2.曲柄为最短杆。 铰链四杆机构存在曲柄的条件是: 1.最短杆与最长杆长度之和小于或等于其余两杆长度之和。2.机架或连架杆为最短杆。 三、四杆机构类型判别 否Lmax+Lmin≤L′+L″是 不可能有曲柄可能有曲柄 最短杆对边最短杆 最短杆邻边 双摇杆机构曲柄摇杆机构双曲柄机构 四、铰链四杆机构的演化 1.曲柄滑块机构 2.偏心轮机构 3.导杆机构 ①摆动导杆机构(牛头刨床)
1. 计算齿轮机构的自由度. 解:由于B. C 副中之一为虚约束,计算机构自由度时,应将 C 副去除。即如下 图所示: 该机构的自由度1213233231=?-?-?=--=h p p n F 2. .机构具有确定运动的条件是什么如果不能满足这一条件,将会产生什么结果 机构在滚子B 处有一个局部自由度,应去除。 该机构的自由度017253231=-?-?=--=h p p n F 定轴轮系 A B C 1 2 3 4 图2-22 A B C D G E H F
当自由度F=1时,该机构才能运动, 如果不能满足这一条件,该机构无法运动。 该机构当修改为下图机构,则机构可动: N=4, PL=5, Ph=1; F=?-?-= 自由度342511 3. 计算机构的自由度. 1)由于机构具有虚约束, 机构可转化为下图机构。 F=?-?-= 自由度342511
2)由于机构具有虚约束, 机构可转化为下图机构。 F=?-?= 自由度31211 3)由于机构具有虚约束, 机构可转化为下图机构。 F=?-?= 自由度33241 第一章平面机构的运动简图及自由度 一、判断题(认为正确的,在括号内画√,反之画×) 1.机构是由两个以上构件组成的。() 2.运动副的主要特征是两个构件以点、线、面的形式相接触。() 3.机构具有确定相对运动的条件是机构的自由度大于零。() 4.转动副限制了构件的转动自由度。() 5.固定构件(机架)是机构不可缺少的组成部分。() 个构件在一处铰接,则构成4个转动副。() 7.机构的运动不确定,就是指机构不能具有相对运动。() 8.虚约束对机构的运动不起作用。() 二、选择题 1.为使机构运动简图能够完全反映机构的运动特性,则运动简图相对于与实际机构的()应相同。 A.构件数、运动副的类型及数目 B.构件的运动尺寸 C.机架和原动件 D. A 和B 和C 2.下面对机构虚约束的描述中,不正确的是()。 A.机构中对运动不起独立限制作用的重复约束称为虚约束,在计算机构自由度时应除去虚约束。 B.虚约束可提高构件的强度、刚度、平稳性和机构工作的可靠性等。 C.虚约束应满足某些特殊的凡何条件,否则虚约束会变成实约束而影响机构的正常运动。为此应规定相应的制造精度要求。虚约束还使机器的结构复杂,成本增加。 D.设计机器时,在满足使用要求的情况卜,含有的虚约束越多越好。 三、综合题
平面连杆机构 主要内容:平面连杆机构的类型和应用 1.平面连杆机构的特点:优点和缺点 在运动副的类型、接触方式上分析优缺点 2.平面连杆机构的类型: 铰链四杆机构、含有一个移动副的四杆机构、含有两个移动副的四杆机构 3.介绍铰链四杆机构组成和类型 由机架、连架杆、连杆组成铰链四杆机构。如图所示、介绍如何运动4.曲柄摇杆机构运动过程 相互转换、两图对比说明 5.举例说明曲柄摇杆机构,缝纫机踏板机构 分析缝纫机运动过程 6.雷达天线俯仰机构。实体图和结构简图 7.双曲柄机构,运动形式和平行四边形机构简图 一般形式的双曲柄机构,当主动曲柄作等速转动时,从动曲柄作变速转动。在双曲柄机构中,若相对两杆的长度相等且平行,则称其为平行四边形机构.如图所示 8.通过添加虚约束使机构保持平行四边形机构,如图所示 9.逆平行四边形机构,车门启闭机构如图 该机构特点两曲柄转向相反 10.双摇杆机构运动形式介绍等腰梯形机构 两杆长度相等时称为等腰梯形机构,通过图例说明运动形式 11.双摇杆机构应用实例,风扇摇头机构和汽车前轮转向机构结构简图 12.含有一个移动副的四杆机构,介绍曲柄滑块机构 一个连架杆为曲柄,另一个连架杆为相对机架作往复移动的滑块,该机构称为曲柄滑块机构.曲柄滑块机构可实现曲柄整周转动和滑块的往复移动的相互转换. 当滑块的导路线通过曲柄的转动中心时,这种曲柄滑块机构称为对心曲柄滑块机构.当滑块的导路线不通过曲柄的转动中心,而是距离曲柄转动中心有偏距e时,称为偏置曲柄滑块机构. 13.对心曲柄滑块机构和偏置曲柄滑块机构的结构简图和生活中的应用 14.导杆机构的转变 通过图例表示两形式的转变 15.摆动导杆机构在牛头刨床中的应用.如图所示 在导杆机构中,当机构的长度小于曲柄的长度,导杆能作整周转动,这种导杆机构称为转动导杆机构.当机架的长度大于曲柄的长度时,导杆仅能作往复摆动,这种导杆机构称为摆动导杆机构.
机械设计基础 第三章平面机构运动简图及自由度 班级:学号:姓名: 一、填空题 1.从机构结构观点来看,任何机构是由_________、_________、__________三部分组成。 2.构件的自由度是指。 3.两构件之间以线接触所组成的平面运动副,称为副,它产生个约束,而保留个自由度。 4.机构中的运动副是指。 5.机构具有确定的相对运动条件是原动件数机构的自由度。 6.在平面机构中若引入一个高副将引入______个约束,而引入一个低副将引入_____个约束,构件数、约束数与机构自由度的关系是。 7.当两构件构成运动副后,仍需保证能产生一定的相对运动,故在平面机构中,每个运动副引入的约束至多为,至少为。 8.在平面机构中,具有两个约束的运动副是副,具有一个约束的运动副是 副。 9.计算平面机构自由度的公式为F= ,应用此公式时应注意判断: A. 铰链, B. 自由度, C. 约束。 10.机构中的复合铰链是指;局部自由度是 指;虚约束是指。 11.机构运动简图是的简单图形。 二、选择题 1.有两个平面机构的自由度都等于1,现用一个带有两铰链的运动构件将它们串成一个平面机构,则其自由度等于。 A. 0 B. 1 C. 2 2.原动件的自由度应为。 A. 1 B. +1 C. 0 3.基本杆组的自由度应为。 A. -1 B. +1 C. 0 。 4.在机构中原动件数目机构自由度时,该机构具有确定的运动。 A. 小于 B. 等于 C. 大于。 5.计算机构自由度时,若计入虚约束,则机构自由度就会。 A. 增多 B. 减少 C. 不变。 6.构件运动确定的条件是。 A. 自由度大于1 B. 自由度大于零 C. 自由度等于原动件数。
平面机构的自由度 【教学目的】 1、掌握运动链成为机构的条件。 2、熟练掌握机构自由度的计算方法。能自如地运用自由度计算公式计算机构自由度,尤其是平面机构的自由度。 【教学内容】 1、引出自由度的概念,明确自由度和约束的关系; 2、推导自由度计算公式,并加以举例说明; 3、学会利用公式计算平面机构的自由度。 【教学重点和难点】 1、机构自由度的计算 【教学方法】 1、课堂以讲授为主,结合实物文件进行分析讲解。 2、注重师生交流,提倡师生互动,上课时细心观察学生的反应,课间与学生交谈,了解学生的掌握情况,根据反馈的信息,适当地调整授课内容和方法等。【教学内容】 1、概念:平面机构的自由度——机构具有确定运动的独立运动参数称为机构的 自由度。 2、自由度的引入 构件的独立运动称为自由度。一个作平面运动的自由构件具有3个独立的运动,见图1。 图1 平面自由度 即沿x轴、y轴移动及绕垂直于xoy面的轴线的转动。 构件组成运动副后,其运动就受到了约束,其自由度数随之减少,不同类型的运动副带来的约束不同。 如图2移动副中,限制了2相对1沿垂直于导路的移动及相对限制转动,引入两个约束。 如图3中转动副限制了2相限制1沿x轴y轴移动,引入两个约束。
如图4高副中,限制了2相对1沿法线轴的移动,引入一个约束。 图4 高副及表示符号 3 自由度公式的推导 如设平面机构共有n 个活动构件(不包括机架),当此机构的各构件尚未通过运动副联接时,显然它们共有3n 个自由度。 当两构件构成运动副之后,它们的运动就将受到约束,其自由度将减少,假设各构件间共构成了L p 个低副和H p 个高副,自由度减少的数目等于运动副引入的约束(H L p p +2)。于是,该机构的自由度应为 ()H L H L p p n p p n F --=+-=2323 (1) 4 自由度的计算 图5 平面四连杆机构 图6 平面五连杆机构 (1)三个活动构件,四个低副,零个高副。 104233=-?-?=F (2)四个活动构件,五个低副,零个高副 342502F =??= 总结: 平面机构自由度的计算是教学中的重点和难点,计算自由度时需要找准活动构件的个数,注意低副和高副的约束,然后进行计算。
平面机构自由度的计算 1、单个自由构件的自由度为 3 如所示,作平面运动的刚体在空间的位置需要三个独立的参 数(x ,y, θ)才能唯一确定。 2、构成运动副构件的自由度 图2—19运动副自由度 运动副 自由度数 约束数 回转副 1(θ) + 2(x ,y ) =3 移动副 1(x ) + 2(y ,θ) =3 高 副 2(x,θ) + 1(y ) =3 构件自由度=3-约束数 3、平面机构的自由度 1)机构的自由度:机构中活动构件相对于机架所具有的独立运动的数目。 2).机构自由度计算公式 H P -=L 2P -3n F 式中: n-------活动构件数目(不包含机架) L P -----低副数目(回转副、移动副) H P ------高副数目(点或线接 触的) 例题1: 计算曲柄滑块机构的自由度。 解:活动构件数n=3 低副数 PL=4 高副数 PH=0 H P -=L 2P -3n F 图 曲柄滑块机构 =3×3 - 2×4 =1 例题2:计算五杆铰链机构的自由度。 解:活动构件数n=4 低副数 PL=5 高副数 PH=0 H P -=L 2P -3n F 图 五杆铰链机构 =3×4 - 2×4 =2 例题3: 计算凸轮机构的自由度 解:活动构件数n=2 低副数 PL=2 高副数 PH=1 =3×2 -2×2-1 =1 图 运动 副 低副(面接触) 移动副 高副(点或线接触) 约束数为2 约束数为1
凸轮机构 4.机构具有确定运动的条件 原动件的数目=机构的自由度数F(F>0或F≥1)。 若原动件数<自由度数,机构无确定运动; 原动件数>自由度数,机构在薄弱处损坏。 (a)两个自由度(b)一个自由度 (c)0个自由度 图3-11 不同自由度机构的运动 5.计算机构自由度时应注意的事项 1)复合铰链:两个以上个构件在同一条轴线上形成的转动副。 由m个构件组成的复合铰链,共有(m-1)个转动副。 2)局部自由度:在某些机构中,不影响其他构件运动的自由度称为局部自由度局部自由度处理:将滚子看成与从动杆焊死为一体。 注意:在去除滚子的 同时,回转副也应同 时去除,这就相当于 使机构的自由度数减 少了一个,即消除了 局部自由度。 3)虚约束:重复而不起独立限制作用的约束称为虚约束 计算机构的自由度时,虚约束应除去不计。 几种常见虚约束可以归纳为三类: 第一类虚约束:两构件之间形成多个运动副,它们可以是移动副(图2-17)或转动副(图2-18),这类虚约束的几何条件比较明显,计算自由度的处理也较简单,两个构件之间只按形成一个运动副计算即可。 图3-14 导路重合的虚约束图3-15 轴线重合的虚约束第二类虚约束:机构中两构件上某两点的距离始终保持不变。如用一个附加杆件把这两点铰接,即形成虚约束。这两个点可以是某动点对某固定点的关系(如2-15中的E、F),也可以是两个动点之间的关系。这类虚约束常见于平行四边形机构,计算自由度时应撤去附加杆及其回转副。 第三类虚约束:机构中对运动不起作用的对称部分可产生虚约束(图2-19)。这类虚约束常见于多个行星齿轮的周转轮系,计算自由度时应只保留一个行星轮而撤去所有多余的行星轮及其有关运动副。 最后必须说明,虚约束是人们在工程实际中为改善机构或构件受力状况,在一定条件下所采取的
一、填空题: 1.平面连杆机构是由一些刚性构件用低副连接组成的。 2.由四个构件通过低副联接而成的机构成为四杆机构。 3.在铰链四杆机构中,运动副全部是转动副。 4.在铰链四杆机构中,能作整周连续回转的连架杆称为曲柄。 5.在铰链四杆机构中,只能摆动的连架杆称为摇杆。 6.在铰链四杆机构中,与连架杆相连的构件称为连杆。 7.某些平面连杆机构具有急回特性。从动件的急回性质一般用行程速度变化系数表示。 8.对心曲柄滑快机构无急回特性。9.偏置曲柄滑快机构有急回特性。 10.对于原动件作匀速定轴转动,从动件相对机架作往复运动的连杆机构,是否有急回特性,取决于机构的极位夹角是否大于零。 11.机构处于死点时,其传动角等于0。12.机构的压力角越小对传动越有利。 13.曲柄滑快机构,当取滑块为原动件时,可能有死点。 14.机构处在死点时,其压力角等于90o。 15.平面连杆机构,至少需要4个构件。 二、判断题: 1.平面连杆机构中,至少有一个连杆。(√) 2.平面连杆机构中,最少需要三个构件。(×) 3.平面连杆机构可利用急回特性,缩短非生产时间,提高生产率。(√) 4.平面连杆机构中,极位夹角θ越大,K值越大,急回运动的性质也越显著。(√) 5.有死点的机构不能产生运动。(×) 6.机构的压力角越大,传力越费劲,传动效率越低。(√) 7.曲柄摇杆机构中,曲柄为最短杆。(√) 8.双曲柄机构中,曲柄一定是最短杆。(×) 9.平面连杆机构中,可利用飞轮的惯性,使机构通过死点位置。(√) 10.平面连杆机构中,压力角的余角称为传动角。(√) 11.机构运转时,压力角是变化的。(√) 三、选择题: 1.铰链四杆机构存在曲柄的必要条件是最短杆与最长杆长度之和 A 其他两杆之和。 A <=; B >=; C > 。 2.铰链四杆机构存在曲柄的必要条件是最短杆与最长杆长度之和小于或等于其他两杆之和,而充分条件是取 A 为机架。 A 最短杆或最短杆相邻边; B 最长杆; C 最短杆的对边。3.铰链四杆机构中,若最短杆与最长杆长度之和小于其余两杆长度之和,当以 B 为机架时,有两
文章编号:1001-2354(2002)05-0021-03 平面五杆机构类型判别方法的研究 李辉,张策,孟宪举 (天津大学机械工程学院,天津 300072) 摘要:提出并验证了平面二自由度五杆机构双曲柄存在的充要条件,提出平面五杆机构的类型不仅与五杆机构的杆长有关,而且还与机架和原动件的选取有关。平面五杆机构若满足:L max+L min1+L min2 a+b(其余两杆的长度和),且当一个短杆为输入连架杆,而另一个短杆为机架或另一输入连架杆时,则该五杆机构必存在双曲柄。 关键词:五杆机构;机构设计;曲柄 中图分类号:T H122 文献标识码:A 随着机械产品创新设计的发展,平面连杆机构的设计已经不仅局限于传统的单自由度四杆机构,平面多自由度机构已广泛应用于并联机器人、串联机械手等领域,以实现高精度的运动输出或完成更复杂的运动规律。近年随着可控机构研究的发展,国内外学者对平面五杆机构的分析与综合进行了大量的研究,但对平面五杆机构类型的判别方法的研究还很不全面和完善,还没有提出一个比较简便、适用的判别方法[1~4]。作者在对平面五杆机构构型进行了系统分析的基础上,在保证平面五杆机构不出现死点位置的前提下,提出了类似于平面四杆机构的Grashof准则,并用此准则对平面五杆机构进行了分类,最后还分析了平面RRRRP五杆机构曲柄存在的条件。 1 平面5R五杆机构存在曲柄的 杆长条件及其分类 考察图1中所示的全铰链五杆机构中杆L1、L4成为曲杆的条件,若以L5为机架,杆L1、L4为输入杆,则杆L2和L3所形成的小于180的角!BCD称为传动角 ,由机构的可动性条件可知,杆L1、L4若要作整周转动,机构不能有死点,即在杆L1、L4作整周转动过程中,杆L2、L3不能重叠或共线(0< <180),而当 对任意的输入角 1和 4都存在 min>0和 max< 180时,五杆机构ABCDE不会出现死点[5]。由图1分析可知,B和D点的坐标为: B x=L1cos 1, B y=L1sin 1 D x=L5+L4cos 4, D y=L4sin 4 设y表示B点与D点之间的距离,则: y2=(B x-D x)2+(B y-D y)2 =L21+L24+L25+2L4L5cos 4-2L1L5cos 1- 2L1L4cos( 1- 4)(1 ) 图1 由式(1)知:当y2取得极大值或极小值时,传动角 亦取得最大值 max或最小值 min,y2取得极值的必要条件为: y2 1=0 y2 4=0 (2)和!= 2y2 21 2y2 24- 2y2 1 4 2 >0(3) [3] Su Yin,Jonathan Cagan.An extended pattern search al gorithm for three-di m ensional component layout[J].Trans action of ASM E, 2000,102:102-108. [4] S zolfghari,M L i ang.M achine cell/part famil y formation considering processing times and machine capaci ties:A simulated annealing ap proach[J].Computer and Engng,1998,34:813-823.[5] 罗为.二维不规则形状计算机自动排料系统CATLS的研究与设 计[J].计算机工程,1995,21(6):3-9. [6] 童秉枢,等,机械CAD技术基础[M].清华大学出版社,1996. [7] S tefan Jakobs.Theory and methodology on genetic algorithms for the packing of polygons[J].European Journal of Operational Research 88.1996,88:165-181. 21 ?机械设计#2002年5月?5专题论文机构学与机械动力学 收稿日期:2001-06-13;修订日期:2001-10-29 基金项目:国家教育部博士点基金资助项目(2000005630) 作者简介:李辉(1968-),男,天津大学机械工程学院,博士研究生,研究方向:机械设计及理论。
作业1自由度食工051__学号2005220_____姓名_________ 2-9 计算五杆铰链机构的自由度 解: 题 b2-9 p28 2-5 a) 计算推土机构的自由度 解: 判断题(正确:T,错误:F) ()(1) 用简单线条和符号按一定比例定出各运动副的相对位置,并能反映机构各构件间相对运动关系的简单图形,称为机构示意图。 ()(2) 一个作平面运动的自由构件有六个自由度。 ()(3) 一切自由度不为1 的机构都不可能有确定的运动。 选择题 ()(1) 两构件构成运动副的主要特征是__________。 A. 两构件以点线面相接触 B. 两构件能作相对运动 C. 两构件相连接 D. 两构件既连接又能作一定的相对运动 ()(2) 机构的运动简图与__________无关。 A. 构件数目 B. 构件和运动副的结构 C. 运动副的相对位置 D. 运动副的数目类型 ()(3) 机构具有确定相对运动的条件是__________。 A. 机构的自由度F≥0 B. 机构的构件数N≥4 C. F>0 并且F =W D. 原动件数W>1 填空题 (1) 组成机构的构件有三类,其中,机构中的相对静止件称为_________;机构中运动规律已知的构件称为 ___________。 (2) 低副是两构件通过____接触而构成的运动副;高副是两构件通过____或____接触而构成的运动副。 (3) 在平面机构中,若引入一个高副,将引入____个约束;而引入一个低副,将引入____个约束;约束数增加, 则自由度____________。 (4) 机构要能够运动,自由度必须________ 。
2008年第27卷2月第2期机械科学与技术M e c h a n i c a l S c i e n c e a n dT e c h n o l o g y f o r A e r o s p a c e E n g i n e e r i n g F e b r u a r y V o l .272008 N o .2 收稿日期:2006-06-13 基金项目:国家自然科学基金项目(50575002),北京市自然科学基 金项目(3062004),北京市 教委科技发展计划项目(K M 200610005003)和北京工业大学研究生科技基金项目(y k j -2007-1069)资助 作者简介:刘善增(1977-),博士研究生,研究方向为并联机器人 等,l i u s h a n z e n g @163.c o m 刘善增 平面2自由度并联机器人的动力学设计 刘善增 (北京工业大学机电学院,北京 100022) 摘 要:通过对平面二自由度并联机器人动力学的研究和系统存在耦合原因的分析,得出了机构设计的五点措施。采用这些措施对提高平面二自由度并联机构系统的动态特性、易控性,以及增强系统运行的稳定性和精度等都具有重要的作用。最后,通过两个算例验证了这些措施的可行性和效果,经过参数调整后的系统大大降低了驱动力矩和能耗。 关 键 词:并联机器人;机构设计;动力学分析 中图分类号:T H 112 文献标识码:A 文章编号:1003-8728(2008)02-0230-04 D y n a mi cD e s i g no f a 2-D O FP l a n a r P a r a l l e l R o b o t L i u S h a n z e n g (B e i j i n g U n i v e r s i t y o f T e c h n o l o g y ,B e i j i n g 100022) A b s t r a c t :T h e p a p e r p r e s e n t s f i v e m e a s u r e s f o r t h e m e c h a n i s md e s i g n o f a 2-D O F p l a n a r p a r a l l e l r o b o t o n t h e b a s i s o f i t s d y n a m i c a n a l y s i s a n d t h e a n a l y s i s o f c a u s e s f o r f a i l u r e .T h e m e a s u r e s a r e u s e f u l f o r i m p r o v i n g t h e d y n a m i c p r o p e r t i e s ,c o n t r o l l a b i l i t y ,s t a b i l i t y a n d a c c u r a c y o f t h e p a r a l l e l r o b o t .T h e p a p e r g i v e s t w o n u m e r i c a l e x a m p l e s t o v e r i f y t h e f e a s i b i l i t y a n d e f f e c t s o f t h e m e a s u r e s .T h e a d j u s t m e n t o f t h e p a r a l l e l r o b o t ′s p a r a m e t e r s g r e a t l y r e d u c e s i t s a c t u a t o r t o r q u e s a n d e n e r g y c o n s u m p t i o n .K e y w o r d s :p a r a l l e l r o b o t ;m e c h a n i s m d e s i g n ;d y n a m i c s a n a l y s i s 随着机构学发展和研究领域的拓宽及机械产品创新的需求,平面多自由度机构已广泛应用于并联机器人、串联机械手等领域,以实现高速、高精度、高稳定性的运动输出或完成更复杂的运动规律。近年来,对平面并联机构的研究日益受到国内外学者的重视。 然而,由于并联机构存在运动学和动力学的强耦合性,使得这类机构系统的控制较为困难,运行精度低。解耦合在动力学中的研究是个难题。因此,如果能采取有效的结构设计措施,使得机构的动态方程得到简化。那么,对改善系统的动态特性,提高系统的运动精度和实际控制都是非常有利的。 文献[1]中利用平衡自适应的方法对平面二自由度串联机械手进行了静平衡和完全解耦,但系统结构复杂。文献[2]中采用动态质量等价分布和平 衡的方法对平面二自由串联机械手进行了研究,消除了重力项的影响,使得系统的驱动力矩降低了70%和能耗减少了40%。文献[3]中对二自由度五 杆机构进行了动力学分析,并在分析的基础上得出了一种平行四边形的四杆机构(第五杆杆长为0),从而实现了五杆机构的完全解耦。但本质上这种完全解耦的五杆机构已不是真正意义的五杆机构。本文对平面二自由度并联机构的动力学进行了深入研究,分析了系统动态方程中的耦合项,为了达到改善系统动态性能和降低能耗的目的,提出了机构设计的5点措施。1 机构的运动学分析 平面二自由度并联机构A B C D E 的示意图,如图1。图1中A E 为机架;各杆杆长为l i (i =1~5);各杆件的质心S i (i =1~4)位置分别为(l s i ,αi )(i =1~4),αi 为各杆质心与其自身杆件所成夹角,相应的各杆质量为m i (i =1~4)。假定杆A B 和D E 为主动构件,即杆A B 和D E 与驱动器相连。以A 为原点o ,建立直角坐标系o x y ,如图1中所示。则并联机构A B C D E 的向量环方程 DOI :10.13433/j .cn ki .1003-8728.2008.02.029
平面机构自由度的计算 1、单个自由构件的自由度为 3 如所示,作平面运动的刚体在空间的位置需要三个独立的参数(x ,y, θ)才能唯一确定。 2、构成运动副构件的自由度 图2—19运动副自由度 运动副 自由度数 约束数 回转副 1(θ) + 2(x ,y ) =3 移动副 1(x ) + 2(y ,θ) =3 高 副 2(x,θ) + 1(y ) =3 结论:构件自由度=3-约束数 3、平面机构的自由度 1)机构的自由度:机构中活动构件相对于机架所具有的独立运动的数目。 2).机构自由度计算公式 H P -=L 2P -3n F 式中: n-------活动构件数目(不包含机架) L P -----低副数目(回转副、移动副) H P ------高副数目(点或线接触的) 移动副 高副(点或线接触) 约束数为2 约束数为1
例题1: 计算曲柄滑块机构的自由度。 解:活动构件数n=3 低副数 PL=4 高副数 PH=0 H P -=L 2P -3n F 图 曲柄滑块机构 =3×3 - 2×4 =1 例题2:计算五杆铰链机构的自由度。 解:活动构件数n=4 低副数 PL=5 高副数 PH=0 H P -=L 2P -3n F 图 五杆铰链机构 =3×4 - 2×4 =2 例题3: 计算凸轮机构的自由度 解:活动构件数n=2 低副数 PL=2 高副数 PH=1 H P -=L 2P -3n F =3×2 -2×2-1 =1 图 凸轮机构 4.机构具有确定运动的条件 原动件的数目=机构的自由度数F (F >0或F≥1)。 若 原动件数<自由度数,机构无确定运动; 原动件数>自由度数,机构在薄弱处损坏。 (a)两个自由度 (b)一个自由度 (c)0个自由度 图3-11 不同自由度机构的运动
平面机构的自由度和速度分析一、复习思考题1、什么是运动副?运动副的作用是什么?什么是高副?什么是低副?2、平面机构中的低副和高副各引入几个约束?3、机构自由度数和原动件数之间具有什么关系?4、用机构运动简图表示你家中的缝纫机的踏板机构。5、计算平面机构自由度时,应注意什么问题?二、填空题1、运动副是指能使两构件之间既保持接触。而又能产生一定形式相对运动的。2、由于组成运动副中两构件之间的形式不同,运动副分为高副和低副。3、运动副的两构件之间,接触形式有接触,接触和接触三种。4、两构件之间作接触的运动副,叫低副。 5、两构件之间作或接触的运动副,叫高副。 6、回转副的两构件之间,在接触处只允许孔的轴心线作相对转动。 7、移动副的两构件之间,在接触处只允许按方向作相对移动。8、带动其他构件的构件,叫原动件。9、在原动件的带动下,作运动的构件,叫从动件。10、低副的优点:制造和维修,单位面积压力,承载能力。11、低副的缺点:由于是摩擦,摩擦损失比大,效率。12、暖水瓶螺旋瓶盖的旋紧或旋开,是低副中的副在接触处的复合运动。 13、房门的开关运动,是副在接触处所允许的相对转动。 14、抽屉的拉出或推进运动,是副在接触处所允许的相对移动。15、火车车轮在铁轨上的滚动,属于副。三、判断题1、机器是构件之间具有确定的相对运动,并能完成有用
的机械功或实现能量转换的构件的组合。()2、凡两构件直接接触,而又相互联接的都叫运动副。()3、运动副是联接,联接也是运动副。()4、运动副的作用,是用来限制或约束构件的自由运动的。()5、螺栓联接是螺旋副。()6、两构件通过内表面和外表面直接接触而组成的低副,都是回转副。()7、组成移动副的两构件之间的接触形式,只有平面接触。()8、两构件通过内,外表面接触,可以组成回转副,也可以组成移动副。()9、运动副中,两构件联接形式有点、线和面三种。()10、由于两构件间的联接形式不同,运动副分为低副和高副。()11、点或线接触的运动副称为低副。()12、面接触的运动副称为低副。()13、任何构件的组合均可构成机构。()14、若机构的自由度数为2,那么该机构共需 2 个原动件。()15、机构的自由度数应小于原动件数,否则机构不能成立。()16、机构的自由度数应等于原动件数,否则机构不能成立。()四、选择题1、两个构件直接接触而形成的,称为运动副。a.可动联接;b.联接;c.接触2、变压器是。a.机器;b.机构;c.既不是机器也不是机构3、机构具有确定运动的条件是。 a.自由度数目>原动件数目;b.自由度数目<原动件数目;c.自由度数目原动件数目4、图1-5 所示两构件构成的运动副为。a.高副;b.低副5、如图1-6 所示,图中 A 点处形
1. 2. 3. 4. 5. 6.
1.构件数n为7,低副p为9,高副pn为1,局部自由度为1,虚约束为0. E处为局部自由度,C处为复合铰链. F=3n-2p-pn=3*7-2*9-1=2(与原动件数目一致,运动确定) 2. B处有复合铰链,有2个转动副。 无局部自由度。 B点左侧所有构件和运动副带入的约束为虚约束,属于与运动无关的对称部分。n=5, PL=7, PH=0, F= 3n-2PL -PH=3×5-2×7-1×0=1。 运动链有确定运动,因为原动件数= 自由度数。 3.A处为复合铰链,因为有3个构件在此处组成成转动副,所以应算2个转动副。B处为局部自由度,假设将滚子同构件CB固结。 无虚约束。 n=6, PL=8, PH=1, F= 3n-2PL -PH=3×6-2×8-1=1。 运动链有确定运动,因为原动件数= 自由度数。 4. 没有复合铰链、局部自由度、虚约束。 n=4, PL=5, PH=1, F= 3n-2PL -PH=3×4-2×5-1=1。 运动链有确定运动,因为原动件数= 自由度数。 5. 计算自由度:n=4, P L=6, P H=0, F= 3n-2P L -P H=3×4-2×6-1×0=0,运动链不能动。修改参考方案如图所示。 6. F处为复合铰链,因为有3个构件在此处组成成转动副,所以应算2个转动副。 B处为局部自由度,假设将滚子同构件CB固结。 移动副M、N中有一个为虚约束,属于两构件在多处组成运动副。 n=7, PL=9, PH=1, F= 3n-2PL -PH=3×7-2×9-1=2。 运动链没有确定运动,因为原动件数< 自由度数。
百度文库- 让每个人平等地提升自我! 1 平面机构虚约束的分析 机构是由若干构件组成的,是实现机械预期运动的装置,这些“预期运动”都是在原动 件的驱动下实现的,而其原动件的数目必须等于它的自由度。由此可见,准确计算机构的自由度对于正确分析和设计机构至关重要。在各种实际机构中,为了改善构件的受力情况,增加机构的刚度,或保证机构运动的顺利,往往要多增加一些构件与运动副(1)这些运动副中往往包括虚约束。 在计算平面机构自由度时,最常用的公式是契贝舍夫公式,简称契氏公式(2): W=3n-2P L-P H 现计算下图所示机构的自由度: 可知,n=4, P L=6, P H=0,所以W=3*4-2*6=0 显然答案是错误的,原动件个数是1。这是因为该机构中出现了虚约束。所谓虚约束,笔者认为就是指不产生约束的约束,也即是所引入的构件由于几何尺寸满足一定的规律,不会对所在机构产生约束。 在机构自由度计算中.产生虚约束的情况有4种情况(3): (1)如果将机构的某个运动副拆开,机构被拆开的两部分在原联接点的运动轨迹仍相互重合,则产生虚约束。 (2)在机构运动过程中,如果某两构件上两点之间的距离始终保持不变.那么,若将此两点以构件相连,则因此而引入的约束必为虚约束。 (3)如果两构件在几处接触而构成移动副,且各接触处两构件的相对运动方向一致;或者两构件在几处配合而构成转动副,且各配合处的轴线重合,则只应考患一处运动副引入的约束,其他各处为虚约束。 (4)机构中对运动不起作用的对称部分亦是虚约束。 笔者认为,在分析机构是否含有虚约束时,最好的方法是先分析该构件的功能,特别是“可疑”构件的作用,然后试着去掉该构件,看该机构还能否实现所期待的功能,因为引入虚约束的目的是为了改善构件的受力情况,增加机构的刚度,或保证机构运动的顺利,且不影响机构的运动规律。例如以上机构的虚约束的作用是约束下面的导杆在水平方向运动,如果去掉E,,该机构的运动规律并没有发生改变,就可以断定E,是虚约束。 在机械设计中,虚约束往往是“点睛之笔”,它能够使机械变得更加科学、实用。学会分析虚约束的最终目的是在自己设计机械机构的时候能够“因地适宜”、灵活地运用虚约束。能否熟练实用虚约束是判断机械设计者是否合格的重要标准。—————————————————————————————————————— 参考文献 (1)徐锦康.机械原理[M].北京:机械工业出版社 (2)李学荣.四连杆机构综合概论(第一册)[M].北京:机械工业出版 社。1985. (3)孙桓,陈作模机械原理(第5版)[MJ北京:高等教育出 版社,1996. 电气工程及自动学院 胡佳男