https://www.doczj.com/doc/ad14229954.html,
线性最小方差估计用于SAR干涉图大气延迟改正1
许才军1,王江林1
1武汉大学测绘学院, 地球空间环境与大地测量教育部重点实验室,武汉(430079)
email: cjxu@https://www.doczj.com/doc/ad14229954.html,
摘要:本文将线性最小方差估计引入SAR干涉图大气延迟改正,并用模拟实验比较了地势平坦地区线性最小方差估计与以往常用于SAR干涉图大气延迟改正的距离权倒数法和普通克里格算法的插值效果。同时,还比较了地势起伏较大地区,考虑了高差因素的线性最小方差估计法和考虑了高差因素的普通克里格算法、未考虑高差因素的线性最小方差估计法、普通克里格算以及距离权倒数法的插值效果。研究结果表明:对于地势平坦地区,在各种精度情况下,当已知点呈随机分布时,点数越少,线性最小方差估计的插值效果的优势越明显;对于地势起伏较大地区,考虑了高差因素的线性最小方差估计的插值效果最佳。
关键词:线性最小方差估计法 SAR干涉图 大气延迟改正
1.引言
两幅SAR(合成孔径雷达)图像共轭相乘可以得到一幅干涉图,包含地形、地表形变和大气延迟等信息[1]。利用两幅干涉图可以得到去除地形影响的差分干涉图(利用一幅干涉图和外部DEM也可以得到去除地形影响的干涉图),这些干涉图都可以称为SAR干涉图。将干涉图解缠后可以得到DEM或形变场,这种得到DEM和形变场的技术分别称为InSAR和D-InSAR。大气延迟是SAR干涉图主要的误差源,在地势平坦地区,干涉图中的大气延迟主要由湿延迟差引起,而在地势起伏较大地区,干涉图中的大气延迟还包含流体静力延迟差。Goldstein利用莫哈韦沙漠地区的三幅SIR-C SAR Tandem数据(间隔一天),得出的大气延迟峰值为2.8cm(单程),RMS为0.3cm[2]。在某些情况下,大气延迟引起的高程误差可以达到290m(水平基线为100m),引起的形变误差为10cm[3]。因此,要得到高精度的InSAR产品,必须对干涉图中的大气延迟进行改正。由于电离层在垂直方向变化不大,在水平方向的变化尺度大于100km,所以干涉图中电离层延迟影响不大[4],也就是说干涉图中大气延迟影响主要是由对流层延迟引起的。SAR干涉图中对流层延迟的改正方法,归纳起来可以分为两大类:一类是统计法 [3,5,6,7];一类是校准法[8,9,10,11,12]。前者利用多幅干涉图本身(二幅或二幅以上)来改正对流层延迟,后者是利用辅助数据(如气象,GPS数据等)获取对流层延迟(或其中的分量)以改正其影响;前者的改正效果很大程度上依赖于干涉图的数量,而后者的改正效果与所利用的辅助数据类型(包括数据的空间分辨率及其精度)和插值算法有关。本文将线性最小方差估计法引入SAR干涉图大气延迟改正,讨论其与其它几种常用的大气延迟改正的插值算法的改正效果。
2.大气延迟改正的插值算法
用校准法改正大气延迟(对流层延迟)只能得到有限的采样点,其空间分辨率远远小于干涉图的空间分辨率。如果用GPS改正对流层延迟,通常使用GPS连续跟踪站的数据,落在
11本课题得到高等学校博士学科点专项科研基金(项目编号:20030486038)资助
- 1 -
一幅SAR 影像内的GPS 站点数一般为30~50个[9]。MODIS 提供的水汽产品分辨率为1km ×1km ;MERIS 则为1.2km ×1.2km ,还可以提供300m ×300m 的高空间分辨率水汽产品。因此,必须将得到的对流层延迟插值到干涉图格网上去。
目前常用于大气延迟插值的算法有距离权倒数法(Inverse Distance Weighted Averaging, IDWA )和普通克里格(Ordinary Kriging, KRG )算法[13,14]。
设辅助数据为,N i x z i i ...,,3,2,1),(=r i x r 为已知点的空间坐标,N 为已知点数目。IDWA 和KRG 算法的估计公式均可表示为:
∑==N i i i z z
1
0?α 其中,为待插值点处的估值,0?z
α为已知点的组合系数。IDWA 算法的组合系数等于待插值点到已知点距离的平方反比,而KRG 算法的组合系数则需由克里格方差最小准则推出,该算法在插值前需对已知点进行结构分析,考虑了已知点的空间分布,故而能得到较好的插值效果[15]。
线性最小方差估计法(Linear Minimum Mean Square Error ,LMMSE )是以估计参数误
差的均方差最小为准则。设已知点向量为,其中为第i 个采样点,N 为已知点数量。可表示为已知点向量的线性函数 T
N i z z z z L )......(21=i z 0?z
L z
βα+=0? (1) 在估计参数误差的均方差阵最小的准则下,可求得系数βα,[16]。
, (2) L L L z z D D μμα100??=10?=L
L z D D β其中,L z μμ,0分别为待插值点处和已知点处的大气延迟期望值。为已知点的方差协方差阵,为待插值点与已知点的协方差阵。、可根据KRG 结构分析结果求得。Zebker (1997)认为干涉图中的大气延迟是零均值的L D L z D 0L D L z D 0[3]。在干涉图中的大气延迟满足二阶平稳假设的条件下,可认为其期望为零,即L z μμ,0均为零。这样,将系数βα,代入式
(1)即可求得待插值点的估值:
L D D z L L z 100??= (3)
这种针对干涉图中大气延迟的线性最小方差估计方法不仅考虑了已知点的空间结构,而且考虑了大气延迟的统计特征,是对普通克里格方法的改进。
需要指出的是,这里LMMSE 算法采用了KRG 的结构分析结果。对于地势平坦地区,结构分析所采用的理论半变异模型只需考虑水平距离的影响;对于地势起伏较大地区,理论半
变异模型还需考虑高程的影响[10,18]。为此,可以引入如下的半变异函数理论模型[10]:
H k h C ×+×=αγ (4)
其中,γ为半变异值,h 和H 分别为水平距离和高差,C 、α和k 为模型系数。本文采用Matlab 的非线性拟合函数NLINFIT 确定C 、α和k 。在以下模拟实验中,每实施这样一次插值,都会得到一组模型系数值,本文从所得到的模型系数计算得到的C 、α和k 的平均值
分别为0.000104,0.956223,-0.000837(γ,h 和H 的单位均为m )
。 - 2 -
本文把考虑了高差因素的KRG 和LMMSE 算法分别记为KRGH 和LMMSEH ,KRG 和LMMSE 表示未考虑高差因素普通克里格和线性最小方差算法。
3.线性最小方差算法改正效果分析
为讨论线性最小方差算法的改正效果,作者用模拟数据分别对上面几种算法进行了计算分析,下面说明具体计算过程和结果分析。对于各向同性且二阶平稳的随机场,其统计特征可用结构函数表示为[9]:
(5)
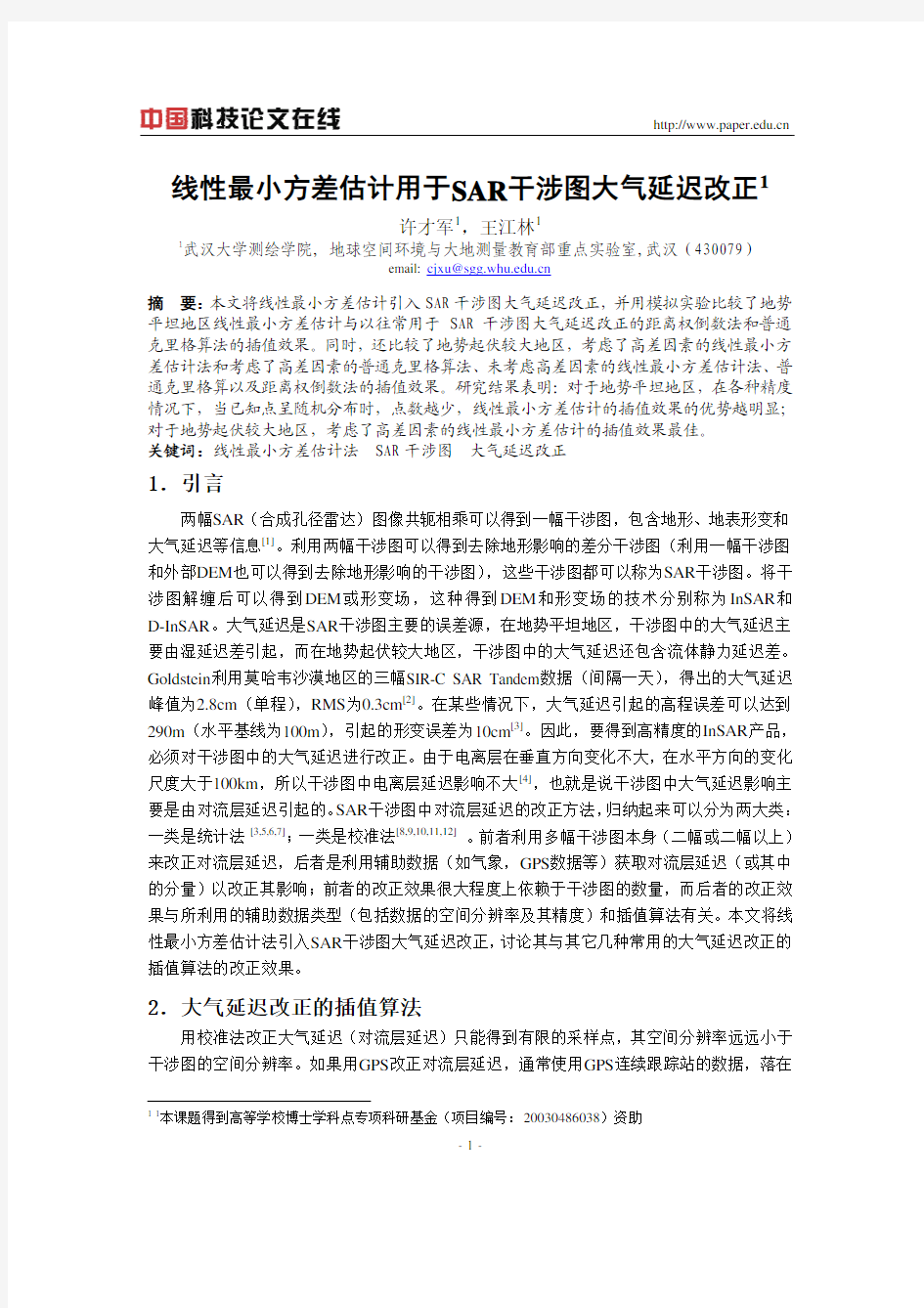
νR C R D x 2)(= Treuhaft 和Lanyi[1987]提出一种描述湿延迟的统计模型[17]。他们的研究指出,湿延迟的空间结构函数幂指数ν的变化范围约为2/3~5/3。当湿延迟的变化尺度远小于1km 时,ν为2/3,变化尺度为3000km 时,ν为5/3。随机行走过程的空间结构函数幂指数为1[3]。由上面湿延迟结构函数幂指数的变化范围可知随机行走过程可以模拟1km ~3000km 间某一空间尺度的湿延迟。据此,作者采用随机行走过程来模拟湿延迟图。对于地势平坦地区,大气延迟即为湿延迟;对于地势起伏较大地区,还需加上流体静力延迟差图。流体静力延迟差图可根据DEM 得到。本文得到的模拟大气延迟图大小为10km ×10km ,空间分辨率为100m ×100m ,如图1所示:
(a) 地势平坦地区大气延迟模拟图 (b) 地势起伏较大地区大气延迟模拟图
图1 SAR 干涉图中的模拟大气延迟
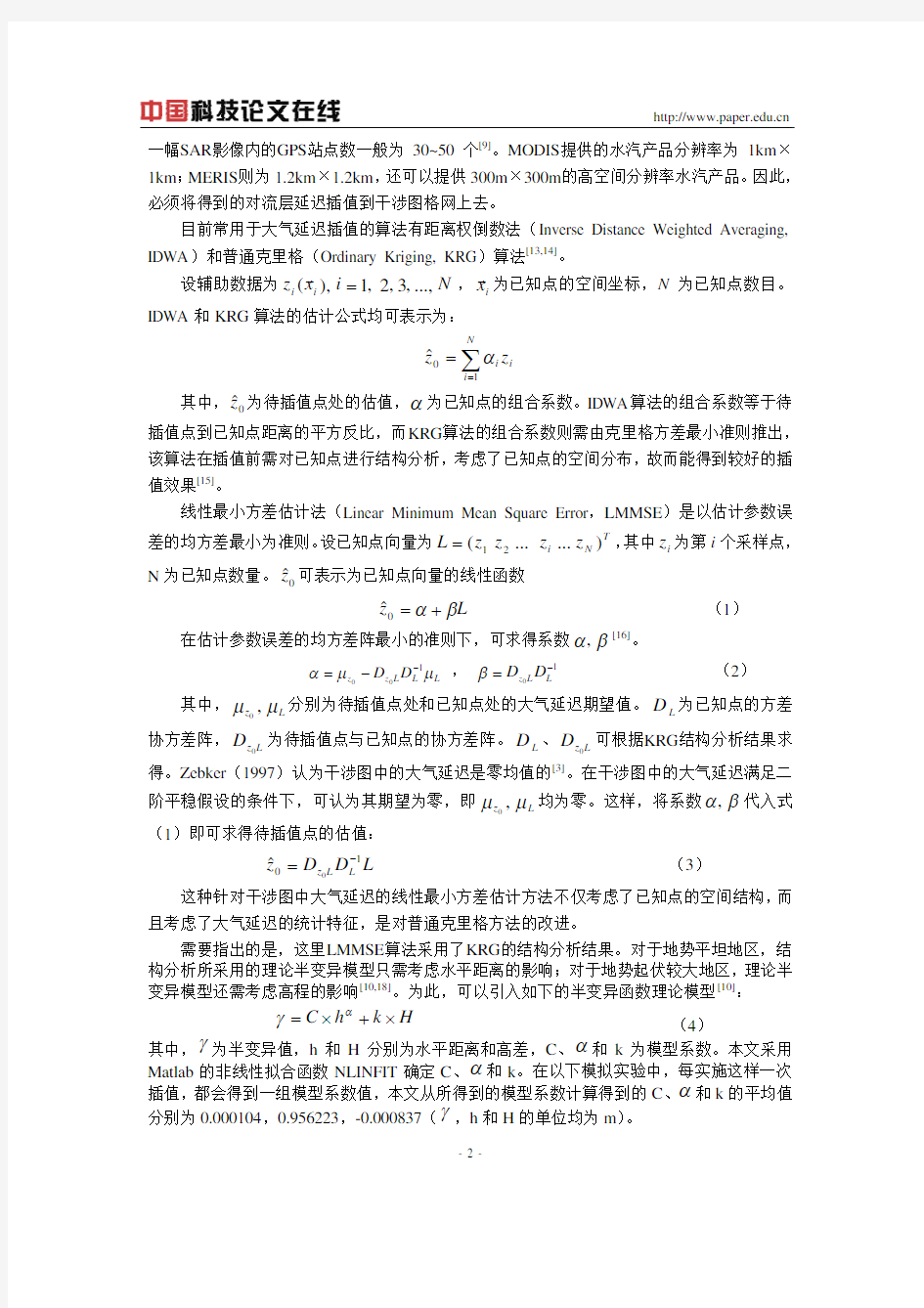
从模拟延迟图中抽取一定的已知点,进行插值,得到改正延迟图,从模拟延迟图中减去改正延迟图,得到残差图。本文将用残差图的RMS 作为插值算法优劣的评价因子。本文首先讨论地势平坦地区在不同已知点数、不同空间分布和不同精度情形下LMMSE ,KRG ,IDWA 的插值效果,结果如图2,3所示。图2,3中,横轴为已知点点数,纵轴为残差RMS ,圆点、上三角和下三角点分别表示IDWA 、KRG 和LMMSE 算法得到的RMS 。
图2(a )比较了三种算法在不同已知点数时的优劣,KRG 和LMMSE 算法均优于IDWA 算法,而LMMSE 又略优于KRG 算法。图2的四幅图比较了已知点在不同精度情况下三种算法的插值效果。从图中可知,在四种精度情况下,当已知点数较少时,LMMSE 算法都有比KRG 和IDWA 更优的插值效果。随着精度的降低,IDWA 的插值效果开始接近于KRG 和LMMSE ,而在已知点中误差为6mm ,点数多于20以及中误差为1cm ,点数多于10的情况下,IDWA 的插值效果超过了KRG 和LMMSE ,这是因为KRG 和LMMSE 结构分析的结果受到了已知点误差的影响,反而使其插值效果不如没有考虑已知点空间分布的IDWA 算 - 3 -
法。
(a) sigma=0 (b) sigma=3mm
(c) sigma=6mm (d) sigma=1cm
图2 不同精度情形下插值算法的比较(图中方形点表示未进行改正的RMS)
图3 格网分布情形下插值算法的比较 图4 地势起伏较大地区五种算法的比较
图3为当已知点呈格网分布时的三种插值算法效果比较示意图,由图可知,LMMSE与KRG插值效果相当且都优于IDWA,在已知点数大于36时,LMMSE插值效果略优于KRG 插值效果。
- 4 -
图4为地势起伏较大地区,LMMSEH,KRGH,LMMSE,KRG和IDWA插值算法的比较。KRGH和LMMSEH方法的改正效果明显优于IDWA,KRG和LMMSE方法,而LMMSEH插值效果略优于KRGH。当使用70个采样点时,IDWA、KRG、LMMSE、KRGH 和LMMSEH插值算法使残差RMS分别减小31.2%,46.8%,46.7%,57.9%和62.6%。从图中可以看出,LMMSEH有最好的插值效果。
4.结束语
通过上面的讨论分析,可以得到如下结论:
1,在地势平坦地区,当已知点呈随机分布时,已知点数越少LMMSE算法的改正效果就越优于IDWA和KRG方法;
2,如果已知点呈格网分布时,LMMSE算法从总体上的插值效果亦优于IDWA和KRG算法;
3,在地势起伏较大地区,考虑了高差因素的LMMMSE算法能得到最优的插值效果。
本文将线性最小方差估计(LMMSE)用于SAR干涉图中大气延迟的改正,并与以往常用的距离权倒数法(IDWA)和普通克里格(KRG)算法的改正效果进行了比较;同时还比较了地势起伏较大地区,考虑了高差因素的LMMSE(LMMSEH方法)、KRG(KRGH方法)和未考虑高差因素的LMMSE,KRG以及IDWAS算法的优劣。本文的结果可以为实际应用具体的插值算法进行大气延迟改正提供参考依据。
参考文献
[1] Paul A. Posen, Scott Hensley, et al, Synthetic Aperture Radar Interferometry, Processing of the IEEE[C] ,
2000,88(3): 333~382.
[2] Goldstein, R. M. Atmospheric limitation to repeat-track radar Interferometry[J]. Geophysical Research
Letters, 1995, 22(18): 2517~2520
[3] Zebker, H., P. A. Rosen, and S. Hensley. Atmospheric effects in interferometric synthetic aperture radar
surface deformation and topographic maps[J]. Journal of Geophysical Research , 1997, 102(B4): 7545~7563
[4] 李陶. 重复轨道星载SAR差分干涉监测地表形变研究[D]. 武汉大学测绘学院, 博士学位论文,2004
[5] Ferretti, A., Prati, C. and Rocca, F. Permanent Scatters in SAR Interferometry[J]. IEEE Transactions on
Geoscience and Remote Sensing, 2001,39(1): 8~20
[6] Beauducel, F., Briole, P., Froger, J. V olcano-wide fringes in ERS synthetic aperture radar interferograms of
Enta (1992-1998): Deformation or tropospheric effect?[J]. Journal of Geophysical Research,2000,105(B7): 16391~16402.
[7] Crosetto, M., C. C. Tscherning, B. Crippa, and M. Castillo. Subsidence monitoring using SAR Interferometry:
Reduction of the atmospheric effects using stochastic filtering[J]. Geophysical Research Letters, 2002, 29(9), 26, 10.1029/2001GL013544
[8] Delacourt, C., Briole, P. and Achache, J. Tropospheric correction of SAR interferograms with strong
topography: application to Enta[J]. Geophysical Research Letters,1998, 25(15): 2849~2852.
[9] Williams, S., Bock, Y. and Fang, P. Integrated satellite Interferometry: Tropospheric noise, GPS estimates and
implications for interferometric synthetic aperture radar products[J]. Journal of Geophysical Research, 1998, 103(B11): 27051~27068
[10] Zhenhong Li, E.J. Fielding, P. Cross, and J.-P. Muller, Interferometric synthetic aperture radar atmospheric
correction:GPS topography-dependent turbulence model[J]. JOURNAL OF GEOPHYSICAL RESEARCH , 2006,111, B02404, doi:10.1029/2005JB003711
[11] P.W. Webley, R.M. Bengley, A.H. Dodson, etc., Atmospheric water vapor correction to InSAR surface motion
measurements on mountains: results from a dense GPS network on Mount Etna[J]. Physics and Chemistry
- 5 -
of the Earth, 2002, 27: 363~370.
[12] Masanobu Shimada. Correction of the Satellite’s State Vector and the Atmospheric Excess Path Delay in SAR
Interferometry – Application to Surface Deformation Detection [J]. The Geodetic Society of Japan, 1999, 45(4): 327~346
[13] G. Matheron, Principles of Geostatistics[J].Economic Geology, 58, 1963,1246 – 1266
[14] D. Legates, and C. Willmont, Mean Seasonal and Spatial Variability in Global Surface Air Temperature[J].
Theor. Appl. Climatol., 4 1, 1990, 11-21
[15] 于崇文. 数学地质的方法与应用[M].冶金工业出版社, 北京, 1980.
[16] 崔希璋, 於宗俦, 陶本藻等. 广义测量平差[M]. 武汉测绘科技大学出版社, 武汉, 2001
[17] Treuhaft, R. N., and G. E. Lanyi, The effect of the dynamic wet tropospheric on radio interferometric
measurement [J]. Radio Science. 1987, 22: 251~265.
[18] Emardson, T.R., M. Simons, and F.H. Webb, Neutral atmospheric delay in interferometric
synthetic aperture radar applications: statistical description and mitigation[J]. J. Geophys.
Res., 2003, 108(B5), 2232, doi:10.1029/2002JB001781.
Linear Minimum Mean Square Error Estimation for wet
delay correction in SAR Interferogram
Caijun XU Jianglin WANG
School of Geodesy and Geomatics, Key Laboratory of Geospace Environment and Geodesy, Ministry of Education, Wuhan University, 129 Luoyu Road, Wuhan, 430079, China
Abstract
Linear Minimum Mean Square Error (LMMSE) Estimation is introduced for atmospheric delay correction in SAR Interferogram in this paper. In plain area, the performance of LMMSE is compared with Inverse Distance Weighted Averaging (IDWA) and Ordinary Kriging (KRG), commonly used for wet atmospheric correction in SAR Interferogram, using simulated data. According to the simulation experiment result, LMMSE is better than IDWA and KRG, particularly for sparse randomly distributed known points even the accuracy of known points is bad. And in mountainous area, the performance of LMMSE, KRG considering height difference is compared with LMMSE, KRG not considering height difference and IDWA. According to the simulation experiment result, the LMMSE interpolator considering height difference has the best performance in interpolating atmospheric delay observations in mountainous area.
Keywords: Linear Minimum Mean Square Error Estimation , SAR Interferogram ,atmospheric delay correction
许才军:男。1964年生。博士,教授,博士生导师。主要研究方向:大地测量学与地球动力学;InSAR与GPS数据融合处理理论与应用。
- 6 -
OLS 估计量的性质的推导证明(一些补充) 1、 线性: 2 2 2 2 2 2 (()()0) i i i i i i i i i i i i i i i i i i i i i x y x Y Y x Y Y x x x x x x Y x kY k x X X X n X x x ββΛ Λ -===-==-=-===∑∑∑∑∑∑∑∑∑∑∑∑∑∑∑i 由于(1)证明斜率系数估计量是Y的线性函数。 , 其中= 22 2222 (0)(1,0)01,1·0,0()1()101,1 i i i i i i i i i i i i i i i i i i i i i i i i i i i i i i i x k x x k x x x k x x x x k X k x X k x X k k X x x k x k k X k X =========+=+=+====∑∑ ∑ ∑∑∑∑∑∑∑∑∑∑∑∑∑∑∑∑∑∑∑ 注意: (由于对确定量而=()=故又故言是定值)前已证前已证记得与对后面的故证明会有用。 211 ),i i i i i i Y Y X k X Y w Y w k X n n ααβΛ Λ Λ =-=-==-∑∑() 证明截距系数估计量是的线性函数。 (其中
11 )111):(0)10(1;)1,i i i i i i i i i i i i i i i i i i w k X n k X X k n n w X k X X X X k X n n X k k X w w X X n =-=-=-===-=-====-=∑∑∑∑∑∑∑∑∑∑∑∑∑ 注意 ( 前已证前已证注意 0,对后面的 1;(证明有用。 2、无偏: 112211221122)()(...)()()...()()()...(1,0)()i i i i i i i i n n n n n n kY k X k k X k k E k E k k k E k E k E k k E k E k E k X k E βββαβεαβεβεεεεεεεεεεεΛ Λ ==++=++=+==+++=+++=++=+∑∑∑∑∑∑∑∑∑iiiii i iii(1) 是的无偏估计量。 ( 由于 (前已证注 意假设 0())((0)i i i k E E k ββεεεβββ Λ Λ ==+=+=∑∑ii 所以对等式 =两边取期望有,) (1,i i i i i w w E w X k ααεαααααεα Λ ΛΛ Λ ==+=+∑∑∑∑ii课件上有错误:(2) 是的无偏估计量,即) 证明方法同上,参考课=应改为=注意利用 件0。 3、有效性:
第六章 带有线性约束的多元线性回归模型及其假设检验 在本章中,继续讨论第五章的模型,但新的模型中,参数β满足J 个线性约束集,R β=q ,矩阵R 有和β相一致的K 列和总共J 个约束的J 行,且R 是行满秩的,我们考虑不是过度约束的情况,因此,J <K 。 带有线性约束的参数的假设检验,我们可以用两种方法来处理。第一个方法,我们按照无约束条件求出一组参数估计后,然后我们对求出的这组参数是否满足假设所暗示的约束,进行检验,我们在本章的第一节中讨论。 第二个方法是我们把参数所满足的线性约束和模型一起考虑,求出参数的最小二乘解,尔后再作检验,后者就是参数带有约束的最小二乘估计方法,我们在本章的第二节中讨论。 第一节 线性约束的检验 从线性回归模型开始, εβ+=X y (1) 我们考虑具有如下形式的一组线性约束, J K JK J J K K K K q r r r q r r r q r r r =+++=+++=+++βββββββββ 22112 222212********* 这些可以用矩阵改写成一个方程 q R =β (2) 作为我们的假设条件0H 。 R 中每一行都是一个约束中的系数。矩阵R 有和β相一致的K 列和总共J 个约束的J 行,且R 是行满秩的。因此,J 一定要小于或等于K 。R 的各行必须是线性无关的,虽然J =K 的情况并不违反条件,但其唯一决定了β,这样的约束没有意义,我们不考虑这种情况。 给定最小二乘估计量b ,我们的兴趣集中于“差异”向量d=Rb -q 。d 精确等于0是不可能的事件(因为其概率是0),统计问题是d 对0的离差是否可归因于抽样误差或它是否是显著的。
最小方差自校正控制Matlab 程序 1.自校正控制 自适应控制有很多种,例如模型参考自适应控制系统、自校正控制系统等。 自校正控制(STC)最早是由R.E. Kalman 在1958年提出的,他设计了基于最小二乘估计和有限拍控制的自适应控制器,并为了实现这个控制器,还建造了一台专用模拟计算机,但其发展受到了当时的硬件问题的闲扰。 图1间接自校正控制系统 图2直接自校正控制系统 自校正控制系统也有内环和外环。内环与常规反馈系统类似,外环由对象参数递推估计器和控制器计算机构组成,其任务是由递推估计器在线估计被控对象参数,用以代替对象的未知参数,然后由设计机构按一定的规则对可调控制器的参数进行在线求解,用以修改内环的控制器。 自校正控制器是在线参数估计和控制参数在线设计两者的有机结合。另外,在参数估计时,对观测数据的使用方式有两种。一种是不直接更新控制器参数,而是先估计被控对象模型本身的未知参数,然后再通过设计机构得到控制器参数,如图 1所示,称为间接算法,另一种是直接估计控制器参数,这时需要将过程重新参数化,建立一个与控制器参数直接关联的估计模型,称为直接算法,如图2。 2.最小方差自校正Matlab 算法仿真(直接自校正和间接自校正) 设被调对象为CARMA 模型 111()()()()()()d A z y t z B z u t C z t ξ----=+ 其中, 112 11 11()1 1.70.7()10.5()10.2A z z z B q z C z z -------=-+=+=+ 式中,()k ξ为方差为1的白噪声。 (一)取初值6?(0)10(0)0P I θ==、,0 ?f 的下界为min 0.1f =,期望输出()r y k 为幅值为10的方波信号,采用最小方差直接自校正控制算法,观察不同时滞d=1、4、8时,最小方差自校正算法的控制效果。
大气环流图 大气大范围运动的状态。某一大范围的地区(如欧亚地区、半球、全球),某一大气层次(如对流层、平流层、中层、整个大气圈)在一个长时期(如月、季、年、多年)的大气运动的平均状态或某一个时段(如一周、梅雨期间)的大气运动的变化过程都可以称为大气环流。 大气环流是完成地球- 大气系统角动量、热量和水分的输送和平衡,以及各种能量间的相互转换的重要机制,又同时是这些物理量输送、平衡和转换的重要结果。因此,研究大气环流的特征及其形成、维持、变化和作用,掌握其演变规律,不仅是人类认识自然的不可少的重要组成部分,而且还将有利于改进和提高天气预报的准确率,有利于探索全球气候变化,以及更有效地利用气候资源。大气环流通常包含平均纬向环流、平均水平环流和平均径圈环流3部分。 平均纬向环流 指大气盛行的以极地为中心并绕其旋转的纬向气流,这是大气环流的最基本的状态,就对流层平均纬向环流而言,低纬度地区盛行东风,称为东风带(由于地球的旋转,北半球多为东北信风,南半球多为东南信风,故又称为信风带);中高纬度地区盛行西风,称为
西风带(其强度随高度增大,在对流层顶附近达到极大值,称为西风急流);极地还有浅薄的弱东风,称为极地东风带。 平均水平环流 指在中高纬度的水平面上盛行的叠加在平均纬向环流上的波状气流(又称平均槽脊),通常北半球冬季为3个波,夏季为4个波,三波与四波之间的转换表征季节变化。 平均径圈环流 指在南北-垂直方向的剖面上,由大气经向运动和垂直运动所构成的运动状态。通常,对流层的径圈环流存在3 个圈:低纬度是正环流或直接环流(气流在赤道上升,高空向北,中低纬下沉,低空向南),又称为哈得来环流;中纬度是反环流或间接环流(中低纬气流下沉,低空向北,中高纬上升,高空向南),又称为费雷尔环流;极地是弱的正环流(极地下沉,低空向南,高纬上升,高空向北)。
第七章 带有线性约束的多元线性回归模型及其假设检验 在本章中,继续讨论第五章的模型,但新的模型中,参数β满足J 个线性约束集,R β=q ,矩阵R 有和β相一致的K 列和总共J 个约束的J 行,且R 是行满秩的,我们考虑不是过度约束的情况,因此,J <K 。 带有线性约束的参数的假设检验,我们可以用两种方法来处理。第一个方法,我们按照无约束条件求出一组参数估计后,然后我们对求出的这组参数是否满足假设所暗示的约束,进行检验,我们在本章的第一节中讨论。 第二个方法是我们把参数所满足的线性约束和模型一起考虑,求出参数的最小二乘解,尔后再作检验,后者就是参数带有约束的最小二乘估计方法,我们在本章的第二节中讨论。 第一节 线性约束的检验 从线性回归模型开始, εβ+=X y (1) 我们考虑具有如下形式的一组线性约束, J K JK J J K K K K q r r r q r r r q r r r =+++=+++=+++βββββββββ 22112 22221211 1212111 这些可以用矩阵改写成一个方程 q R =β (2) 作为我们的假设条件0H 。 R 中每一行都是一个约束中的系数。矩阵R 有和β相一致的K 列和总共J 个约束的J 行,且R 是行满秩的。因此,J 一定要小于或等于K 。R 的各行必须是线性无关的,虽然J =K 的情况并不违反条件,但其唯一决定了β,这样的约束没有意义,我们不考虑这种情况。 给定最小二乘估计量b ,我们的兴趣集中于“差异”向量d=Rb -q 。d 精确等于0是不可能的事件(因为其概率是0),统计问题是d 对0的离差是否可归因于抽样误差或它是否是显著的。
第三章估计理论 什么是“估计”? 通俗解释:对事物做大致的判断 专业解释:通过一定的技术手段获得关于被估计事件、参数、过程的相关信息,再对这些信 息进行加工、处理获得结果的过程。
3.1引言 3.1 引言 根据研究对象的不同估计分为二种 参量估计:被估计的对象是随机变量或非随机的未知量 波形估计:被估计的对象是随机过程或非随机的未知过程 信号参量估计理论 与信号参量估计相关的理论 最佳估计 一定准则下的“最好”估计 应用领域 通信系统、雷达系统、语音、图像处理、自动控制
3.1.2 估计量的性质质 假设得到N 个观测样本数据为: 为待估计参量,[][]0,1,,1 x n w n n N θ=+=?…式中,是观测噪声。 θ[]w n 估计的任务就是利用观测样本数据构造估计量,获得估计量后,通常需要对的质量进行评价,这就需要研[]x n θ θ θ究估计量的主要性质。 估计量也是一个随机变量,具有均值和方差等统计特征,可以利用其统计特征对估计量的性质进行评价。评价 θ 指标包括:无偏性、一致性、充分性和有效性。
1、无偏性 非随机参量随机参量??θθ 无偏估计 渐进无偏估计()E θθ=()()E E θ=?lim ()N E θθ→∞=?lim ()()N E E θ θ→∞=如果上式不满足,则是一个有偏估计 θ 定义 为估计量的偏估计量的无偏性保证估计量分布在参量真值附近,是衡量()()b E θθθ=?估计量性能优劣的重要指标。然而,一个估计量是无偏的不能确保就是好的估计量,它仅能保证估值的均值近似真值。
2、一致性 可以通过增加观测样本数据来减少估计量的估计误差,具有这种性质的估计称为一致估计。 简单一致性: ?lim (||)1N P θθδ→∞?<=均方一致性:2?lim [()]0N E θ θ→∞ ?= ?定义估计误差,对无偏估计,误差的方差为 222?εθθ=?在同时满足无偏性、均方一致性的条件下,随着观测样本()()()() Var E b E εεθε==数的增加,估计误差的方差将减小并趋于零。
大气环流,一般是指具有世界规模的、大范围的大气运行现象,既包括平均状态,也包括瞬时现象,其水平尺度在数千公里以上,垂直尺度在10km以上,时间尺度在数天以上。大气大范围运动的状态。某一大范围的地区(如欧亚地区、半球、全球),某一大气层次(如对流层、平流层、中层、整个大气圈)在一个长时期(如月、季、年、多年)的大气运动的平均状态或某一个时段(如一周、梅雨期间)的大气运动的变化过程都可以称为大气环流。 主要方式
平均纬向环流 指大气盛行的以极地为中心并绕其旋转的纬向气流,这是大气环流的最基本的状态,就对流层平均纬向环流而言,低纬度地区盛行东风,称为东风带(由于地球的旋转,北半球多为东北信风,南半球多为东南信风,故又称为信风带);中高纬度地区盛行西风,称为西风带(其强度随高度增大,在对流层顶附近达到极大值,称为西风急流);极地还有浅薄的弱东风,称为极地东风带。 平均水平环流 指在中高纬度的水平面上盛行的叠加在平均纬向环流上的波状气流(又称平均槽脊),通常北半球冬季为3个波,夏季为4个波,三波与四波之间的转换表征季节变化。 平均径圈环流
指在南北-垂直方向的剖面上,由大气经向运动和垂直运动所构成的运动状态。通常,对流层的径圈环流存在3 个圈:低纬度是正环流或直接环流(气流在赤道上升,高空向北,中低纬下沉,低空向南),又称为哈得来环流;中纬度是反环流或间接环流(中低纬气流下沉,低空向北,中高纬上升,高空向南),又称为费雷尔环流;极地是弱的正环流(极地下沉,低空向南,高纬上升,高空向北)。 形成原因 一是太阳辐射,这是地球上大气运动能量的来源,由于地球的自转和公转,地球表面接受太阳辐射能量是不均匀的。热带地区多,而极区少,从而形成大气的热力环流。 二是地球自转,在地球表面运动的大气都会受地转偏向力作用而发生偏转。三是地球表面海陆分布不均匀。四是大气内部南北之间热量、动量的相互交换。 以上种种因素构成了地球大气环流的平均状态和复杂多变的形态。 纬度环流 纬度环流亦称行星风系或气压带风带,地球上的风带和喘流由三个对流环流(三圈环流)所推动:哈德里环流(低纬度)、费雷尔环流(中纬度)以及极地环流。有时候同一种环流(譬如低纬度)可以在同一纬度(如赤道)有数个同时存在,随机地随时间移动、互相合并与分裂。为了简单起见,同一种环流通常当作一个环流处理。 低纬度环流
电信学院毕业设计任务书 题目PCS流量单元最小方差控制器性能评估 学生姓名班级学号 题目类型技术开发指导教师李二超系主任李炜 一、毕业设计的技术背景和设计依据 现代流程工业对控制系统的控制品质提出了严格的要求。然而,相关研究表明:在工业控制过程中,多达60%的控制回路由于控制策略失配、控制参数失调和生产工况变化等原因,长期工作在性能欠佳的状态。而发现并定位这些欠优化回路,仅靠人工进行工程试验很难达到经济、高效的要求,因此研究相关的理论和方法,实现对控制回路性能的实时自动检测和评价,显得尤为重要。 本实验室具有德国FESTO公司研制生产的PCS实验装置,集成了目前工业控制中较为典型的四种控制系统:液位控制、流量控制、压力控制、温度控制,分为四个独立站。在往届毕业设计中,开发了基于OPC的PCS平台独立单元控制算法,数据采集方便,利于控制器性能监控与评估的实施。单水箱的流量控制过去往往使用的是PID控制,本次毕业设计引入最小方差控制器,来测试系统的控制精度和鲁棒性,比较两种控制器的性能。 二、毕业设计的任务 1、查阅相关科技文献,掌握控制、检测、通讯等技术要求; 2、利用OPC进行通讯完成对流量单元的PID和最小方差控制; 3、进行系统调试; 4、撰写毕业设计说明书; 5、完成指定内容的外文资料翻译。 三、毕业设计的主要内容、功能及技术指标 1、毕业设计的主要内容 1)设计说明书正文主要内容要求 ①PCS流量单元控制工艺过程简介; ②最小方差控制的原理和仿真; ③MATLAB利用OPC进行通讯的实现过程; ④两种控制器的在线调节过程。 全文要求逻辑严密、条理清晰,文字流畅,理论联系实际,符合科技写作规范。
§3.6 受约束回归 在建立回归模型时,有时根据经济理论需对模型中变量的参数施加一定的约束条件。如上节建立中国城镇居民对食品的消费需求函数时,根据需求函数的一般理论,它应满足零阶齐次性条件,即双对数线性模型中各变量前的参数和为零。同样地,在估计以幂函数的形式表示的生产函数模型时,有时也施加产出关于资本与劳动的弹性和为1的约束。模型施加约束条件后进行回归,称为受约束回归(restricted regression),与此对应,不加任何约束的回归称为无约束回归(unrestricted regression)。 一、模型参数的线性约束 一般地,估计线性模型时可对模型参数施加若干个线性约束条件。如对模型 (3.6.1) 可施加 ,(3.6.2) 于是,对(3.6.1)的回归可转化为对施加上述条件后如下模型的回归: (3.6.3) 或(3.6.4) 其中,,, 如果运用普通最小二乘法得到参数的估计结果,可由上述约束条件得到,。 然而,对所考查的具体问题能否施加约束条件,或者说能否直接对施加约束后的模型进行回归,还需进一步进行相应的检验。常用的检验有F检验、检验与t检验,这里主要介绍F检验。 在同一数据样本下,记无约束样本回归模型的矩阵式为 (3.6.5) 记受约束样本回归模型的矩阵式为 (3.6.6) 于是,受约束样本回归模型的残差项可写为 得受约束样本回归模型的残差平方和 (3.6.7) 式中第二项为一非负标量,于是 (3.6.8)
其中,为无约束样本回归模型的残差平方和。 在(3.6.5)与(3.6.6)两个回归模型中,有着相同的被解释变量Y与相同的数据样本,于是Y的总离差平方和TSS也相同。(3.6.8)式表明受约束样本回归模型的残差平方和不小于无约束样本回归模型的残差平方和,于是,受约束样本回归模型的回归平方和不大于无约束样本回归模型的回归平方和。这意味着,通常情况下,对模型施加约束条件会降低模型的解释能力。 但是,如果约束条件为真,则受约束回归模型与无约束回归模型具有相同的解释能力,从而使得与的差异变小。于是,可用的大小来检验约束条件的真实性。 根据数理统计学的知识,~,其中k为回归模型中解释变量的个数,为回归模型随机扰动项的方差。于是, (3.6.9) (3.6.10) (3.6.11) 其中,,分别为无约束与受约束回归模型的解释变量的个数。于是可通过计算(3.6.11)式的统计量来进行相应的检验。当然,由于随机扰动项的方差往往未知,检验时需用它的估计量替代。 由(3.6.9)式与(3.6.11)式,可进一步得到如下的F统计量 (3.6.12) F统计量无需估计随机扰动项的方差。根据该统计量,如果约束条件无效,则与的差异较大,计算的F值也较大。于是,可用计算的F统计量的值与所给定的显著性水平下的临界值作比较,来对约束条件的真实性进行检验。需注意的是,恰为约束条件的个数。 例3.6.1 在§3.5节中国城镇居民对食品的人均消费需求实例中,无约束回归模型(3.5.18)式的残差平方和=0.00324,受约束回归模型(3.5.19)式的残差平方和=0.00332,样本容量n=14,无约束回归模型变量个数=3,约束条件个数=3-2=1。于是 在5%的显著性水平不,自由度为(1,10)的F统计量的临界值 为=4.96。计算的F值小于临界值,不能拒绝中国城镇居民对食品的人均消费需求函数具有零阶齐次特性这一假设。 需要指出的是,这里介绍的F检验适合所有关于参数线性约束的检验,§3.4节中对回归模型总体的线性性检验,可以归结到这里的F检验上来。如对线性模型 的总体线性性检验,就是要检验联合假设:
高斯-马尔科夫定理(OLS 有效性)的证明 根据OLS 的一阶条件: 022) (='+'-=??βββX X y X S 设b 是解,则b 满足正则方程组 y X Xb X '=' 这正是我们曾分析的最小二乘正则方程组。因为X 是满秩的,所以X X '的逆存在, 从而得到解是 y X X X b ''=-1)( ββββX X y X y y S ''+''-'=2)( 022) (='+'-=??βββX X y X S 为了证实这确实是最小值,我们需要二阶编分矩阵 X X S b '=???=2') (2ββββ 是一个正定矩阵。 我们现在来证明这个结果。对任意一非零向量c ,令Xc X c q ''=,则 Xc q i i =='=∑νυ νν其中,2 除非ν的每一元素都为0,否则q 是正的。但若υ为零的话,则X 的各列的一个线性组合等于0,这与X 满秩的假定相矛盾。 三、最小二乘估计量的统计特性 在本节中,我们对回归量的两种情况,即非随机回归量和随机回归量下分别作讨论。 1、X 非随机回归量 若回归量当作非随机来进行处理时,则将X 当作常数矩阵处理就可导出最小二乘估计量的各种特性。可得 εβεβX X X X X X X b ''+=+''=--11)()()( (4) 若X 是非随机的,或0)(='εX E ,则(4)中第二项的期望值是0。所以,最小二乘
估计量是无偏的,它的协方差矩阵是 ]))([(]['--=ββb b E b Var ])()[(11--''''=X X X X X X E εε 11)(][)(--''''=X X X E X X X εε 121)()()(--'''=X X X I X X X σ 12)(-'=X X σ 在前面的内容中,对K =2的特殊b 是β的最小方差的线性无偏估计量。现在我们给出这个基本结果的一个更一般的证明,令β是Cy b =~ 的另一个不同于b 的线性无偏估计量, 其中C 是一个K ×n 矩阵。若b ~是无偏的, ,][][βεβ=+=C CX E Cy E 这暗示着CX=I ,并且εβC b +=~。所以可以得到b ~的协方差矩阵是 C C b Var '=2]~[σ 现在令X X X C D ''-=-1)(,由假设知D ≠0。那么,,~ *Dy b b b =-= ,''*)(2DD D D b Var Y σ==∑ 于是'DD 是非负定矩阵。 则 ]))()()([(]~[112'''+''+=--X X X D X X X D b Var σ )])()()([(112--'+'''+=X X X D X X X D σ ))((12-'+'=X X D D σ 在展开这个四项和式之前,我们注意到 )()(1X X X X DX CX I ''+==- 由于上面最后一项是I ,有DX=0,所以 122)(]~[-'+'=X X D D b Var σσ D D b V a r '+=2 ][σ
- 1 -基于线性约束最小方差(LCMV )准则的极化 自适应滤波算法 乔晓林1,薛敬宏2,邵仙鹤3 (哈尔滨工业大学(威海)信息技术研究所,山东威海264209) E-mail (xuejinghong@https://www.doczj.com/doc/ad14229954.html, ) 摘 要:针对强干扰环境下,基于线性约束最小方差(LCMV)准则,提出了一种极化域新的自适应滤波算法,采用变极化接收技术,实现对信号的最佳接收,仿真结果也证明了该方法的有效性。 关键词: 线性约束最小方差;极化;自适应滤波 1 引言 当雷达目标信号与强干扰信号在时域、频域和空域的状态特征难以区分时,若两者在极化域可分,则可利用极化信息进行雷达目标检测和识别[1] 。极化滤波是在基于研究波的偏振特性基础上进行的一种空间滤波的信号处理方法,在前人做的很多工作中,都是假设目标和干扰信号的极化状态是已知的或是不变的,而由于干扰信号的Sinclair 散射矩阵[2]是未知的,或随时间或空间缓慢变化的,如果采用权系数不变的滤波器,则会因为滤波器的“凹口”不能对准干扰信号,而使信噪比降低。自适应滤波技术在时域和空域(智能天线)都得到了很大发展,本文试图在极化域推导出一种新的自适应滤波器算法,在干扰信号极化状态改变时,滤波器“凹口”能始终对准干扰信号,从而使输出达到“最优”。 2 极化估计 假设对于采用垂直极化天线发射,水平垂直正交双极化接收天线的雷达系统,任意接收电场可用二维矢量表示: T v h X X X ],[= 其中h X 和v X 分别表示水平和垂直极化天线接收的电场矢量,T 表示转置。 则天线接收电压为: X h V T .= (1) 其中h 为接收天线的Jones 矢量。 雷达极化信息可由极化相干矩阵完全表征,极化相干矩阵C 定义为: C={}T X X E . (2) 其中C 为Hermite 矩阵。 极化相干矩阵可以通过最大似然法估计得到[3]: T i N i i X X N C ∑==11~ (3) 由此可得天线接收功率的估计为: {}{}{}h C h h C h h XX E h X h X h E VV E P T T T T T T T T .~ .....)).((~=====&
---------------------------------------------------------------最新资料推荐------------------------------------------------------ 最小二乘法估计量的性质(高斯—马尔可夫定理的初 步证明) 高斯马尔可夫定理: 若一元线性模型满足计量经济基本假设, 则参数的最小二乘估计(OLS) 是最小方差的线性无偏估计。 (BLUE) 最小二乘法估计量 OLS 的性质(高斯马尔可夫定理的 初步证明) 1.线性性: 0 和1 都是iy的线性函数证明: ; 令=j=njiixxxxk12)()( 则有 iniiyk==11 ,且有0=ik, 1=iixk,=i=niixxk122)(1 从而1 是iy的线性函数;同理, 0 = 令iikxnw=1,则有: iiyw=0,即0 也是iy的线性函数。 另有: 1=i w,0=iixw 2. 无偏性: 0 和1 都是0 、1 的无偏估计量;即有: ( )=,00=E ( )11=E 证明: 先证 ( )11E ,又, 1=iixk ()=i=++==iiiiinikuxkyk01011+1 +iiiiukxk ==+iiuk1 ( )(因为: ( )u1101=++=i0iiiiiEkxkkE =ik,1ixk) 同理,利用 1=i w和0=iixw可证得 ( ),00=E 3. 最优性或最小方差性:在所有的线性无偏估计中,0 和1 分别是0 、1 的方差最小的 1 / 2
有效估计量证明: 若1~ 是原值1 的一个线性无偏估计(方差条件不限),且记=iiyc1~(∵线性估计),再根据无偏估计的特性,有:再记P==111==1, 0iiixcc。 ()iiiykc~,则有11~+= P ( )Cov(+)),(2)()(),(2),(),(),(~,~~1111111111PCovDPDPCovCovP PPPCovCovD++=+=++== 如果能证明0),(1=PCov,则利用方差不小于 0 的性质,判定)()()()~(111DDPDD+=,1 即为所有无偏的线性估计中方差最小的。 ∵2u2i2u1)())((),)((),(iiiiiiiiiikkckkcykykcCovPCov=== 又∵=j=njiixxxxk12)()( 且有: 0=ik,1=iixk,=i=niixxk122)(1 所以0)(1)(1212112i===j=j=i=injnjnniiiiixxxxxcxckkc,0),~((1 =PCov, 有: )()()()111DDPDD+=,命题得证。 (此处利用了==1, 0iiixcc)。
最小方差无失真响应波束形成器实验 1、实验内容和目的 1) 通过LMS 算法在波束形成上的应用加深对LMS 算法的理解,掌握LMS 算法的matlab 编程。 2)初步学习阵列信号的处理方法,掌握波束形成的原理,深入理解最小方差无失真响应波束形成的方法,并将LMS 自适应算法应用其中,比较不同信噪比和迭代次数对波束形成的影响。 2、基本原理分析 1)LMS 算法原理 LMS 算法一般来说包括两个基本过程:滤波过程和自适应过程。滤波过程来计算线性滤波器的输出及输出结果与期望响应的误差。自适应则是利用误差来自动调节滤波器的参数。LMS 算法也是一个递推的算法。 设()J n 是滤波器在n 时刻产生的均方误差,其梯度计算如下: ()()22n n ?=-+J p Rw 其中R 和p 分别是输入的自相关矩阵和输入与期望输出的互相关矩阵: ()()()?H n n n =R u u ()()()*?n n n =p u d 则梯度向量的瞬态估计为: ()()()()()()*??22H n n n n n n ? =-+J u d u u w 由最速下降算法可以得到抽头向量更新的递推关系式: ()()()()()()*???1H n n n n n n μ??+=+-??w w u d u w 整个LMS 算法归纳总结如下: 参数设置: M=抽头数(滤波器长度)
μ=步长参数 max 2 0MS μ<< 其中max S 是抽头输入功率谱密度的最大值,而滤波器长度M 为中到大 初始化: 如果知道抽头权向量()n w 的先验知识,则用它来选择()?0w 的合适值,否则令()?00=w 。 更新滤波过程: ()()()?H y n n n =w u ()()()e n d n y n =- ()()()()*??1n n n e n μ+=+w w u 2)MVDR 波束形成。 在一些滤波器应用中,人们希望所设计滤波器在一定约束条件下使均方误差最小化,如,要求在要求线性滤波器的平均输出功率最小化的同时要求在一些特定的感兴趣频率上响应保持恒定。 对于一个线性M 阶横向滤波器来说,假设滤波器的输入为u(n),u(n -1),…,u(n -M+1),则输出为: ()()1 * 0M k k y n w u n k -==-∑ (2.1) 对于正弦激励这一特殊情况,设输入: ()jwn u n e = (2.2) 代入(2.1)中,可以得到: 1*0 ()M jwn jwk k k y n e w e --==∑ (2.3) 于是,约束条件为,寻找一组最优的滤波器系数,满足平均输出功率最小的同时使得在特定频点w 0处满足: 01*0 M jw k k k w e g --==∑ (2.4)
课本中相关章节的证明过程 第2章有关的证明过程 2.1 一元线性回归模型 有一元线性回归模型为:y t = ?0 + ?1 x t + u t 上式表示变量y t 和x t之间的真实关系。其中y t 称被解释变量(因变量),x t称解释变量(自变量),u t称随机误差项,?0称常数项,?1称回归系数(通常未知)。上模型可以分为两部分。(1)回归函数部分,E(y t) = ?0 + ?1 x t, (2)随机部分,u t。 图2.8 真实的回归直线 这种模型可以赋予各种实际意义,收入与支出的关系;如脉搏与血压的关系;商品价格与供给量的关系;文件容量与保存时间的关系;林区木材采伐量与木材剩余物的关系;身高与体重的关系等。 以收入与支出的关系为例。 假设固定对一个家庭进行观察,随着收入水平的不同,与支出呈线性函数关系。但实际上数据来自各个家庭,来自各个不同收入水平,使其他条件不变成为不可能,所以由数据得到的散点图不在一条直线上(不呈函数关系),而是散在直线周围,服从统计关系。随机误差项u t中可能包括家庭人口数不同,消费习惯不同,不同地域的消费指数不同,不同家庭的外来收入不同等因素。所以,在经济问题上“控制其他因素不变”实际是不可能的。 回归模型的随机误差项中一般包括如下几项内容,(1)非重要解释变量的省略,(2)人的随机行为,(3)数学模型形式欠妥,(4)归并误差(粮食的归并)(5)测量误差等。 回归模型存在两个特点。(1)建立在某些假定条件不变前提下抽象出来的回归函数不能百分之百地再现所研究的经济过程。(2)也正是由于这些假定与抽象,才使我们能够透过复杂的经济现象,深刻认识到该经济过程的本质。 通常,线性回归函数E(y t) = ?0 + ?1 x t是观察不到的,利用样本得到的只是对E(y t) = ?0 + ?1 x t 的估计,即对?0和?1的估计。 在对回归函数进行估计之前应该对随机误差项u t做出如下假定。 (1) u t 是一个随机变量,u t 的取值服从概率分布。 (2) E(u t) = 0。 (3) D(u t) = E[u t - E(u t) ]2 = E(u t)2 = ?2。称u i 具有同方差性。 (4) u t 为正态分布(根据中心极限定理)。以上四个假定可作如下表达:u t? N (0,??)。 (5) Cov(u i, u j) = E[(u i - E(u i) ) ( u j - E(u j) )] = E(u i, u j) = 0, (i?j )。含义是不同观测值所对应的随机项相互独立。称为u i 的非自相关性。 (6) x i是非随机的。 (7) Cov(u i, x i) = E[(u i - E(u i) ) (x i - E(x i) )] = E[u i (x i - E(x i) ] = E[u i x i - u i E(x i) ] = E(u i x i) = 0. u i与x i相互独立。否则,分不清是谁对y t的贡献。 (8) 对于多元线性回归模型,解释变量之间不能完全相关或高度相关(非多重共线性)。 在假定(1),(2)成立条件下有E(y t) = E(?0+ ?1 x t+ u t) = ?0+ ?1 x t。 2.2 最小二乘估计(OLS) 对于所研究的经济问题,通常真实的回归直线是观测不到的。收集样本的目的就是要对这条真实的回归直线做出估计。 图2.9
最小方差自校正控制器设计
1 .最小方差自校正控制器 自校正调节器用在参数缓慢变化的系统,在原理上是按系统输出的最小方差综合自校正控制律的,其工作原理如下图所示: 自校正控制器的自校正过程是根据输入 {}()u t 和输出{}()y t 序列数据,不断地对过程 参数进行在线递推估计,得到t 时刻过程参数估计值? ()t θ。最后用最小方差控制律计算控制器参数的新值 ()c t θ,并以此新值去修改控制器的参数,再用控制器在新参数()c t θ下产生的 控制作用()u t ,对过程进行控制。这样的估计和控制过程继续进行下去,直到递推过程参数估计值? ()t θ收敛到它的真值,控制器对过程的控制达到最小方差控制时,自校正调节过程才结束,此时的控制过程达到最优或次最优的特性。 2. 最小方差控制律 考虑一般的随机线性系统 111()()()()()()k A q y t q B q u t C q e t ----=+ 这里u 是控制器,y 是输出,{}()e t 是(0,)N σ独立正态随机变量序列,1q -是后移算符。 假定,,A B C 多项式的系数都是已知的,且在更一般的情形,若1 ()A q -阶数为a n , 1()B q -阶数为b n ,1()C q -阶数为c n ,则1()F q -阶数为1k -,1()G q -阶数为1a n -。 3.最小方差自校正控制器通用程序设计
被控对象:111()()()()()()k A q y t q B q u t C q e t ----=+ 其中:112()1 1.50.7A q q q ---=-+ na=2 1 1 2 ()0.50.40.1B q q q ---=- + nb=2 112()10.80.5C q q q ---=-+ nc=2 {e(t)}为方差为0.1的白噪声。 取期望输出yr(k)为幅值为5的方波信号,采用MVC 算法。 程序如下: a=[1 -1.5 0.7]; b=[0.5 -0.4 0.1]; c=[1 -0.8 0.5]; d=1; %对象参数 na=length(a)-1; nb=length(b)-1; nc=length(c)-1; %na 、nb 、nc 为多项式A 、B 、C 阶次 nf=nb+d-1; %nf 为多项式F 的阶次 L=400; %控制步数 uk=zeros(d+nb,1); %输入初值:uk(i)表示u(k-i); yk=zeros(na,1); %输出初值 yrk=zeros(nc,1); %期望输出初值 xik=zeros(nc,1); %白噪声初值 yr=5*[ones(L/4,1);-ones(L/4,1);ones(L/4,1);-ones(L/4+d,1)]; %期望输出 xi=sqrt(0.1)*randn(L,1); %白噪声序列 [e,f,g]=sindiophantine(a,b,c,d); %求解单步Diophantine 方程 for k=1:L time(k)=k; y(k)=-a(2:na+1)*yk+b*uk(d:d+nb)+c*[xi(k);xik];%采集输出数据 u(k)=(-f(2:nf+1)*uk(1:nf)+c*[yr(k+d:-1:k+d-min(d,nc));yrk(1:nc-d)]-g*[y(k);yk(1:na-1)])/f(1);%求控制量 %更新数据 for i=d+nb:-1:2 uk(i)=uk(i-1); end uk(1)=u(k); for i=na:-1:2 yk(i)=yk(i-1); end yk(1)=y(k); for i=nc:-1:2
最小方差自校正控制系统研究 无锡宏源技师学院宗珏 摘要 自校正控制基本思想:参数估计递归方法的基本思想和各种不同类型的控制算法,可以形成一个实时的计算机控制系统控制参数的自动校正。然而,根据不同类型的算法所使用的不同类型的自调优控制系统。自调整控制器自适应控制从理论到实践是最成熟的控制方法之一。 这个课题主要是最小方差自校正控制系统的研究。最小方差自调整控制器参数不变但是未知SISO离散时间系统,输出与最小方差自调优控制律设计为目标,直接使用递归最小二乘算法估计控制器的参数。通过建立最小方差控制系统的结构模型以及广义最小方差控制系统的结构模型;建立起性能指标;在Matlab下对最小方差控制系统及广义最小方差控制系统进行仿真并且对两种仿真结构进行对比分析。 关键词:自校正控制;递推最小二乘法;最小方差控制;广义最小方差控制 1.1研究目的和意义 在如今,自动化水平已成为衡量各行各业现代化的一个重要标志,对连续和现代工业生产,大规模网络的快速发展和自动化方向,控制系统的质量也提出了更高的要求,除了简单的控制系统,各种复杂的、多变量、时变、非线性和随机控制系统研究尤为重要。所以出现了很多新的控制理论和控制理论的不断发展,它跨越学科界限,正朝着控制论和信息论的基础上,仿生智能控制理论发展。因此对这些控制理论的研究和验证是非常必要的。 随着计算机技术的飞速发展,微电子技术、自调优控制应用程序和在理论上取得了很大的进步,它已经成为现代控制理论,在重要领域极为活跃。在应用上,它涉及多方面的工业部门,大大提高了性能指标及产品质量,节约了能源,并且取得了较为显著的效果。在理论研究方面,研究者也取得了一系列有价值的研究成果。 各种自动化工程学院开了自动化研究课程,但随着现代控制理论是抽象,很难结合实际,缺乏一些不错的实验设施,影响教学质量和人才培养质量,和控制方案的确定及其系统设计、参数设定和过程应基于对象的特点,和对象的特征复杂,很难实现,通过理论计算研究完全控制系统设计和控制参数设置,到目前为止仍然是不可能的。 本文研究的对象是最小方差自校正控制系统。最小方差自校正调节器输出根据最小方差自调优控制律,采用递归最小二乘参数估计算法直接估计控制器参数。基于自适应控制、自调优控制和最小方差自校正控制算法推导,建立最小方差控制系统结
教学目标 通过学习使学生了解三圈环流的形成;理解气压带、风带的形成,了解其分布规律;理解海陆分布对大气环流的影响及季风环流的形成。在学习过程中,培养学生阅读原理示意图的能力,通过阅读形象直观的图像,培养学生的形象思维并由此达到抽象思维的培养,最终做到两种思维的结合,初步形成地理的空间思维。 教学建议 关于海陆分布对大气环流的影响的教学分析 “海陆分布对大气环流的影响”是在了解了气压带和风带的基础,将理想状态,不考虑地表的高低起伏和海陆分布等形成的大气环流进一步复杂化,当考虑海陆分布的影响后,原有的气压带和风带的分布会有所改变,因为海陆之间的热力差异,会影响到海陆的气压分布,特别是对于北半球来说,这种影响体现的特别突出。冬季时北半球陆地是冷源,在大陆中心地区形成高气压中心,副极地低气压带被这个冷高压切断使其仅保留在海洋上;夏季北半球大陆是热源,升温速度非常快,因而在陆地内部形成低压中心,将副热带高气压带切断,仅保留在海洋上。这种高低气压的分布特点教材通过一、七月份海平面等压线分布图展现出来,有利于学生阅读掌握。由于这种高低气压的存在,因此在不同季节,陆地和海洋之间产生了水平气压梯度力,在水平气压梯度力和地转偏向力、摩擦力的共同影响下,就会出现随季节改变风向的风,这就是季风的形成。应该明确的是季风环流也属于大气环流的一部分,通过知识间的相互关联,可以了解季风形成的原因主要是海陆热力性质的差异,但也有例外,南亚的夏季风其形成,是由于南半球的东南信风过赤道右偏形成西南季风,即由于气压带和风带季节移动而形成的,因此形成季风环流的因素应该由两个,海陆热力性质的差异和气压带和风带
广义最小方差直接自校正控制器 clear all;close all; clc a=[1-0.90.8-0.5];b=[12];c=[10.6];d=4; na=length(a)-1;nb=length(b)-1;nc=length(c)-1; nf=nb+d-1;ng=na-1; Pw=1;R=1.5;Q=2;%加权多项式区别于增广最小二乘法中的P np=length(Pw)-1;nr=length(R)-1;nq=length(Q)-1; L=500;%控制步数 uk=zeros(d+nf,1);%输入初值:uk(i)表示u(k-i); yk=zeros(d+ng,1);%输出初值 yek=zeros(nc,1);%最优输出预测估计初值 yrk=zeros(nc,1);%期望输出初值 xik=zeros(nc,1);%白噪声初值 yr=10*[ones(L/4,1);-ones(L/4,1);ones(L/4,1);-ones(L/4+d,1)];%期望输出xi=sqrt(0.1)*randn(L,1);%白噪声序列 %递推估计初值 thetaek=zeros(ng+nf+nc+2,d); P=10^6*eye(ng+nf+nc+2); time=1:L; for k=1:L y(k)=-a(2:na+1)*yk(1:na)+b*uk(d:d+nb)+c*[xi(k);xik];%采集输出数据 %增广最小二乘 phie=[yk(d:d+ng);uk(d:d+nf);-yek(1:nc)]; K=P*phie/(1+phie'*P*phie); thetae(:,k)=thetaek(:,1)+K*(y(k)-phie'*thetaek(:,1)); P=(eye(na+nb+nc+d)-K*phie')*P; ye=phie'*thetaek(:,d);%最优预测输出可以=yr(k) ge=thetae(1:ng+1,k)';fe=thetae(ng+2:ng+nf+2,k)';ce=[1 thetae(ng+nf+3:ng+nf+nc+2,k)']; if abs(ce(2))>0.9 ce(2)=sign(ce(2))*0.9; end if fe(1)<0.1%设置f0的下界为0.1 fe(1)=0.1; end CQ=conv(ce,Q);FP=conv(fe,Pw);CR=conv(ce,R);GP=conv(ge,Pw); u(k)=(-Q(1)*CQ(2:nc+nq+1)*uk(1:nc+nq)/fe(1)-FP(2:np+nf+1)*uk(1:np+nf). ..