1概述 随着计算机软硬件技术的快速发展,大规模复杂场景的实时绘制已经成为可能,这也加快了虚拟现实技术的发展,又对模型的复杂度和真实感提出了新的要求。虚拟场景是虚拟现实系统的重要组成部分,它的逼真度将直接影响整个虚拟现实系统的沉浸感。客观世界在空间上是三维的,而现有的图像采集装置所获取的图像是二维的。尽管图像中含有某些形式的三维空间信息,但要真正在计算机中使用这些信息进行进一步的应用处理,就必须采用三维重建技术从二维图像中合理地提取并表达这些 三维信息。 三维建模工具虽然日益改进,但构建稍显复杂的三维模型依旧是一件非常耗时费力的工作。而很多要构建的三维模型都存在于现实世界中,因此三维扫描技术和基于图像建模技术就成了人们心目中理想的建模方式;又由于前者一般只能获取景物的几何信息,而后者为生成具有照片级真实感的合成图像提供了一种自然的方式,因此它迅速成为目前计算机图形学领域中的研究热点。 2三维建模技术 三维重建技术能够从二维图像出发构造具有真实感的三维图形,为进一步的场景变化和组合运算奠定基础,从而促进图像和三维图形技术在航天、造船、司法、考古、 工业测量、 电子商务等领域的深入广泛的应用。3基于图像的三维重建技术 基于图像的建模最近几年兴起的一门新技术,它使用直接拍摄到的图像,采用尽量少的交互操作,重建场 景。 它克服了传统的基于几何的建模技术的许多不足,有无比的优越性。传统的三维建模工具虽然日益改进,但构建稍显复杂的三维模型依旧是一件非常耗时费力的工作。考虑到我们要构建的很多三维模型都能在现实世界中找到或加以塑造,因此三维扫描技术和基于图像建模技术就成了人们心目中理想的建模方式;又由于前者一般只能获取景物的几何信息,而后者为生成具有照片级真实感的合成图像提供了一种自然的方式,因此它迅速成为目前计算机图形学领域中的研究热点。 4 基于图像重建几何模型的方法 4.1 基于侧影轮廓线重建几何模型 物体在图像上的侧影轮廓线是理解物体几何形状的 一条重要线索1当以透视投影的方式从多个视角观察某一空间物体时,在每个视角的画面上都会得到一条该物体的侧影轮廓线,这条侧影轮廓线和对应的透视投影中心共同确定了三维空间中一个一般形状的锥体1显然,该物体必将位于这个锥体之内;而所有这些空间锥体的交则构成了一个包含该物体的空间包络1这个空间包络被称为物体的可见外壳,当观察视角足够多时,可见外壳就可以被认为是该物体的一个合理的逼近。鉴于此类算法一般需要大量的多视角图像,因此图像的定标工作就变得非常复杂。 4.2采用立体视觉方法重建几何模型 基于立体视觉重建三维几何是计算机视觉领域中的经典问题,被广泛应用于自动导航装置。近年来,立体视觉 图像三维重建技术 康皓,王明倩,王莹莹 (装甲兵技术学院电子工程系,吉林长春130117) 摘要:基于图像的三维重建属于计算机视觉中的一个重要的研究方向,从提出到现在已有十多年的历史。文章首先对三维重建技术做了详细阐述,并着重从计算机图形学的研究角度对基于图像建模技术进行了综述,介绍了 具有代表性的基于图像建模的方法及其最新研究进展,给出了这些方法的基本原理, 并对这些方法进行分析比较,最后对基于图像建模技术的未来研究给出了一些建议和应解决的问题。关键词:三维建模技术;图像建模技术;计算机图形学;虚拟现实中图分类号:TP271文献标识码:A 文章编号1006-8937(2009)11-0042-02 Three-dimensional image reconstruction technique KANG Hao,WANG Ming-qian,WANG Ying-ying (DepartmentofElectronicEngineering,ArmoredInstituteofTechnology,Changchun,Jilin130117,China) Abstract:Image-based Three-dimensional reconstruction is an important research direction in computer vision ,from now more than ten years'history.This article first describes three-dimensional reconstruction technique in detail and review image-based modeling techniques from the perspective of computer graphics research,introduce a representative of the method of image-based modeling and the latest research progress,give the basic principles of these methods,analysis and compare these methods,finally,give a number of recommendations and problems which should be solved on image-based modeling technology for future research. Keywords:three-dimensional modeling techniques;image modeling techniques;computer graphics;virtual reality 收稿日期:2009-03-19 作者简介:康皓(1978-),女,吉林长春人,硕士研究生,讲师,研 究方向:计算机辅助设计与编程。 TECHNOLOGICAL DEVELOPMENT OF ENTERPRISE 2009年6月Jun.2009 企业技术开发 第28卷
三维重建综述 三维重建方法大致分为两个部分1、基于结构光的(如杨宇师兄做的)2、基于图片的。这里主要对基于图片的三维重建的发展做一下总结。 基于图片的三维重建方法: 基于图片的三维重建方法又分为双目立体视觉;单目立体视觉。 A双目立体视觉: 这种方法使用两台摄像机从两个(通常是左右平行对齐的,也可以是上下竖直对齐的)视点观测同一物体,获取在物体不同视角下的感知图像,通过三角测量的方法将匹配点的视差信息转换为深度,一般的双目视觉方法都是利用对极几何将问题变换到欧式几何条件下,然后再使用三角测量的方法估计深度信息这种方法可以大致分为图像获取、摄像机标定、特征提取与匹配、摄像机校正、立体匹配和三维建模六个步骤。王涛的毕业论文就是做的这方面的工作。双目立体视觉法的优点是方法成熟,能够稳定地获得较好的重建效果,实际应用情况优于其他基于视觉的三维重建方法,也逐渐出现在一部分商业化产品上;不足的是运算量仍然偏大,而且在基线距离较大的情况下重建效果明显降低。 代表文章:AKIMOIO T Automatic creation of3D facial models1993 CHEN C L Visual binocular vison systems to solid model reconstruction 2007 B基于单目视觉的三维重建方法: 单目视觉方法是指使用一台摄像机进行三维重建的方法所使用的图像可以是单视点的单幅或多幅图像,也可以是多视点的多幅图像前者主要通过图像的二维特征推导出深度信息,这些二维特征包括明暗度、纹理、焦点、轮廓等,因此也被统称为恢复形状法(shape from X) 1、明暗度(shape from shading SFS) 通过分析图像中的明暗度信息,运用反射光照模型,恢复出物体表面法向量信息进行三维重建。SFS方法还要基于三个假设a、反射模型为朗伯特模型,即从各个角度观察,同一点的明暗度都相同的;b、光源为无限远处点光源;c、成像关系为正交投影。 提出:Horn shape from shading:a method for obtaining the shape of a smooth opaque object from one view1970(该篇文章被引用了376次) 发展:Vogel2008年提出了非朗伯特的SFS模型。 优势:可以从单幅图片中恢复出较精确的三维模型。 缺点:重建单纯依赖数学运算,由于对光照条件要求比较苛刻,需要精确知道光源的位置及方向等信息,使得明暗度法很难应用在室外场景等光线情况复杂的三维重建上。 2、光度立体视觉(photometric stereo) 该方法通过多个不共线的光源获得物体的多幅图像,再将不同图像的亮度方程联立,求解出物体表面法向量的方向,最终实现物体形状的恢复。 提出:Woodham对SFS进行改进(1980年):photometric method for determining surface orientation from multiple images(该文章被引用了891次) 发展:Noakes:非线性与噪声减除2003年; Horocitz:梯度场合控制点2004年; Tang:可信度传递与马尔科夫随机场2005年; Basri:光源条件未知情况下的三维重建2007年; Sun:非朗伯特2007年; Hernandez:彩色光线进行重建方法2007年;
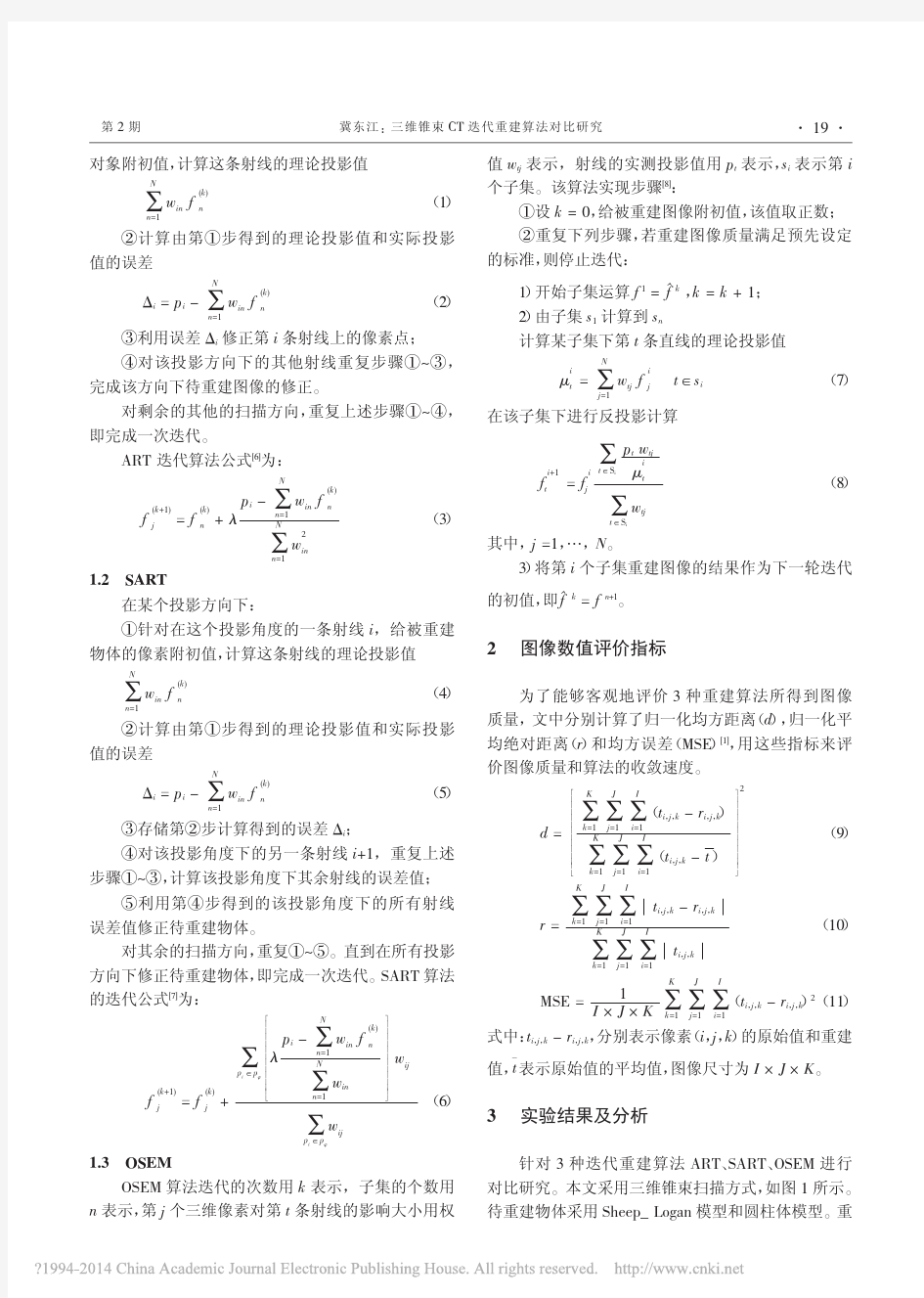
第24卷第s期2004年9月 核电子学与探测技术 NuclearElectronics&DetectionTechnology V01.24No.5 Sept.2004 基于FDK算法的锥束CT重建近似 算法性能比较 曾凯,陈志强,张丽,赵自然 (清华大学工程物理系粒子信息获取与处理国家专业实验室.北京100084) 摘要:相比通常的扇束和平行束CT重建,惟束CT有诸多优点(如空间分辨率高,扫描速度快等)。近似锥柬重建算法理论结构简单,重建速度快,易于实际应用。对新出现的几种近似锥束重建算法作了简单介绍,并利用这些算法对3DShepp-logan模型的仿真模拟对这些算法的特点作了比较和讨论。 美键词:锥束重建;CT算法}FDK算法 中圈分类号:0411.3文献标识码:A文章编号:0258—0934(2004)05—0511—03 0引言 Radon在1917年发表的论文首先提出了物体的Radon变换和Radon反变换公式,1960年Kirillov又在数学上给出了从复杂投影数据重建物体的算法【1]。基于这些前人的工作Smith[“,Grangeat…和Tuy…在1984年前后分别提出了3种类型的锥束精确重建算法。至此,奠定了锥束重建算法的理论基础。后来,研究人员又基于这3种算法发展了多种算法。但是,由于精确算法的数学复杂及计算量大,很难得到实际应用,因此,同时又有许多理论结构简单的近似算法提出,其中最著名的就是FDK算法“],由于是二维扇柬算法的推广,它比基于三维Radon变化的精确重建算法在数学上简单得多。而且,在锥角比较小的时候(士4。间),能够取得比较好的重建效果,有很好的商业应用前景。近年来出现的多种近似算法都是基于这种算法发展而来的。 1常见近似重建算法介绍 1.1Full—Scan和Half—ScanFDK算法 收稿日期:2003。04—10 作者简介:曾凯(1980一),男.天津人,清华大学工程物理系硕士生,从事锥束CT重建算法方面的研究。 FDK算法是最适合进行平面圆轨道锥束重建的算法之一。它直接把二维的扇束重建算法推广到了三维锥束重建,首先对每个角度的二维投影数据进行逐行滤波,然后再进行二维的反投影对物体进行重建。具体的公式如下,坐标系见图1。 图1锥柬CT重建系统结构及坐标系示意图 在探测器平面的(y,z)坐标系内,平板探测器获得的二维投影数据P,(y,z),对其进行加权并对投影数据逐行滤波 一,∞ P,(y,z)=Idy『h(Y—Y’)× J一∞ P,(y’,Z’)瞄/(a2+Y”+z地)m](1) 这样,就得到了经过滤波的投影数据P。(y,Z)。 然后,利用二维的反投影重建物体得到体数据 511
SAR立体三维重建 姓名: ******* 学号: ********* 班级: ************* 指导教师: ******
1实验目的 1、理解基于合成孔径雷达立体像对的灰度信息进行三维重建的基本原理与方法; 2、了解ERDAS IMAGINE的基本功能,熟练掌握StereoSAR模块的使用方法; 3、理解SAR传感器几何模型及基于地面控制点(Ground Control Points, GCPs)几何模型精化的原理与方法; 4、通过真实SAR像对的数据处理,掌握SAR立体三维重建的基本流程。 2实验数据说明 本实验采用ERDAS IMAGINE软件的示例数据,RADASAT影像StereoSAR_Ref.img和StereoSAR_Match.img,这两景影像分别拍摄于1996年9月24日和1996年9月17日。 3实验原理 经过试验九的操作,使我们对InSAR提取测区DEM有了一定的掌握。而摄影测量中我们也学习了基于立体像对制作测区三维景观图,因此在此次实验中我们利用摄影测量的原理基于SAR影像进行三维重建。 3.1 SAR立体图像的获取 立体图像在摄影测量中称为立体相对。所谓立体相对是由不同摄站摄取的具有一定重叠的两张相片。因此雷达立体图像也可以定义为:由天线位置探测获取的具有一定影像重叠的两幅雷达图像[1]。 雷达立体图像的获取方式有两种:同侧立体观测和异侧立体观测。前者是指飞行器沿着不同的航线飞行(两次飞行方向可以相同或者相反),雷达从地物的
一侧对同一地区成像,同侧立体观测有可分为同一高度和不同高度两类;异侧立体观测是指雷达从地物的两侧分别对同一地区成像。 图 3.1-1 雷达立体图像获取方式 异侧立体观测获取的雷达立体图像视差明显,基高比(摄影基线与航高之比)大,有利于提高地物目标点高程的测量精度。但是地形起伏较大的地区,目标地物在立体像对的两幅图像上的相应影像不仅颜色差异很大,而且由于地形起伏引起的几何变形差异也很大。因为高出地面地物目标的左侧向着左航线的雷达天线,有效反射面积大,影像为浅色调;而对于右航线,该地物目标左侧反射信号弱或者为盲区,所以影像为深色调。同理,地物目标右侧在两幅图像上的色调与地物目标左侧色调刚好相反,由于异侧飞行所获取的雷达立体图像,使一幅图像上的阴影位于地物目标的一侧,而另一幅图像上的阴影在地物目标的另一侧,这就给立体观察与测量带来了极大的困难。另外,采用斜距显示的雷达图像由于地形起伏的影响,同一地物目标在立体像对的两幅图像上的变形差异也很大。因此,异侧(对侧)获取的雷达立体图像,只适于平坦或丘陵而不适合山地的立体观察与测量[2]。 同侧同高度或者不同高度获取的雷达立体图像,视差和基高比虽然比异侧获取的雷达立体图像要小,但两幅图像上相应影像的色调和图像变形差异较小,只要对雷达工作参数进行适当选择,还是能获得较好的立体效应的,故在丘陵地、山地一般都采用同侧获取雷达立体图像进行地物目标的三维定位和立体测图[2]。 3.2 SAR立体图像的视差 SAR立体图像的视差指高出某一基准面的地物目标在两幅图像上的位移差。摄影测量中称之为立体像对的左右视差,是地物目标点高差的反应,由左右视差
一.迭代算法原理及进展 迭代重建算法的基本原理是:首先对X线光子分布进行原始估计,在此基础上估算每个投影方向上探测器获得的可能计数(即正投影),再将正投影数据与探测器实际采集的投影数据进行比较,用于更新原始估计数据;不断重复此过程,直至下一次迭代结果无限接近由于IR重建时间长,计算复杂,早期IR 法仅在SPECT 和PET等核医学领域得到应用。近年来,得益于计算机技术和图像重建算法的不断发展以及低剂量成像的需求,IR 技术又逐步在CT领域受到广泛关注 目前多家公司推出了多种IR算法,按照迭代计算所利用的数据空间不同,可大致分为3类 (1)仅在图像数据空间进行IR,如IRIS,对原始数据按照传统的 FBP法重建后,再根据噪声模型对获得的图像数据进行多次迭代计算,以降低噪声和伪影。这种方法运算较快,计算时间仅稍长于FBP法,但由于基于FBP图像进行迭代计算,不可避免地具有FBP 法“理想系统”假设的局限性。 (2)在投影数据空间和图像数据空间中均进行IR,如ASIR、SAFIRE、iDose和 AIDR。首先对投影数据以FBP法进行重建,将获得的图像数据与基于统计的、考虑到光子和电子噪声的理想噪声模型进行比较,去除噪声,得到校正图像,对此图像再通过正投影更新原始投影数据,用于下次迭代计算,如此进行多次IR。这种方法重建速度也较快,但同样具有 FBP法的局限性。 (3)仅在投影数据空间进行IR,如 IMR ,MBIR(即Veo技术),对 X线束从焦点到探测器的整个过程建立多个模型,焦点、X线束、体素和探测器的几何形状均被考虑进去,最为复杂,计算量最大,整个重建过程需 10~90min。使用这些技术的意义在于可在大幅降低CT辐射剂量的同时获得与常规FBP法相同、甚至更好的图像质
血管的三维重建 摘要 对于血管的三维重建,本文研究了血管这一类特殊管道的中轴线及其半径的算法,绘制中轴线在XY 、YZ 、ZX 平面的投影图这些问题,问题分为三部分。 针对第一部分,先将100张切片图片在MATLAB 中导出生成0-1矩阵数据,在计算100张切片的最大内切圆半径及对应圆心坐标,为减小误差求100张切片最大内切圆的平均半径41666.29 d 。中轴线的曲线方程可在MATLAB 中拟合得到。 针对第二部分,得到中轴线曲线方程在MATLAB 中绘制出中轴线方程的空间曲线,之后将其投影在XY 、YZ 、ZX 平面上。 针对第三部分,对100张切片进行叠加重合,得到血管的三维立体图,再通过MATLAB 对血管的三维立体图进行优化完成血管的三维重建。 关键词:MATLAB 软件 管道半径中轴线曲线方程
一、问题重述 1.1基本情况 断面可用于了解生物组织、器官等的形态。如果用切片机连续不断地将样本切成数十、成百的平行切片,可依次逐片观察。根据拍照并采样得到的平行切片数字图象,运用计算机可重建组织、器官等准确的三维形态。 1.2相关信息 假设某些血管可视为一类特殊的管道,该管道的表面是由球心沿着某一曲线(称为中轴线)的球滚动包络而成。 现有某管道的相继100张平行切片图象,记录了管道与切片的交。图象文件名依次为0.bmp、1.bmp、…、99.bmp,格式均为BMP,宽、高均为512个象素(pixel)。 取坐标系的Z轴垂直于切片,第1张切片为平面Z=0,第100张切片为平面Z=99。Z=z切片图象中象素的坐标依它们在文件中出现的前后次序为(-256,-256,z),(-256,-255,z),…(-256,255,z), (-255,-256,z),(-255,-255,z),…(-255,255,z), …… (255,-256,z),(255,-255,z),…(255,255,z)。 1.3提出的问题 问题一:计算出管道的中轴线与半径,给出具体的算法。 问题二:绘制中轴线在XY、YZ、ZX平面的投影图。 问题三:绘制血管的三维重建立体图。
三维重建方法综述 三维重建方法大致分为两个部分1、基于结构光的2、基于图片的。这里主要对基于图片的三维重建的发展做一下总结。基于图片的三维重建方法: 基于图片的三维重建方法又分为双目立体视觉;单目立体视觉。 A双目立体视觉: 这种方法使用两台摄像机从两个(通常是左右平行对齐的,也可以是上下竖直对齐的)视点观测同一物体,获取在物体不同视角下的感知图像,通过三角测量的方法将匹配点的视差信息转换为深度,一般的双目视觉方法都是利用对极几何将问题变换到欧式几何条件下,然后再使用三角测量的方法估计深度信息这种方法可以大致分为图像获取、摄像机标定、特征提取与匹配、摄像机校正、立体匹配和三维建模六个步骤。王涛的毕业论文就是做的这方面的工作。双目立体视觉法的优点是方法成熟,能够稳定地获得较好的重建效果,实际应用情况优于其他基于视觉的三维重建方法,也逐渐出现在一部分商业化产品上;不足的是运算量仍然偏大,而且在基线距离较大的情况下重建效果明显降低。 代表文章:AKIMOIOT Automatic creation of 3D facial models 1993 CHENCL Visual binocular vison systems to solid model reconstruction 2007 B基于单目视觉的三维重建方法: 单目视觉方法是指使用一台摄像机进行三维重建的方法所使用的图像可以是单视点的单幅或多幅图像,也可以是多视点的多幅图像前者主要通过图像的二维特征推导出深度信息,这些二维特征包括明暗度、纹理、焦点、轮廓等,因此也被统称为恢复形状法(shape from X) 1、明暗度(shape from shading SFS) 通过分析图像中的明暗度信息,运用反射光照模型,恢复出物体表面法向量信息进行三维重建。SFS方法还要基于三个假设a、反射模型为朗伯特模型,即从各个角度观察,同一点的明暗度都相同的;b、光源为无限远处点光源;c、成像关系为正交投影。 提出:Horn shape from shading:a method for obtaining the shape of a smooth opaque object from one view 1970(该篇文章被引用了376次) 发展:V ogel2008年提出了非朗伯特的SFS模型。优势:可以从单幅图片中恢复出较精确的三维模型。 缺点:重建单纯依赖数学运算,由于对光照条件要求比较苛刻,需要精确知道光源的位置及方向等信息,使得明暗度法很难应用在室外场景等光线情况复杂的三维重建上。 2、光度立体视觉(photometric stereo) 该方法通过多个不共线的光源获得物体的多幅图像,再将不同图像的亮度方程联立,求解出物体表面法向量的方向,最终实现物体形状的恢复。 提出:Woodham对SFS进行改进(1980年):photometric method for determining surface orientation from multiple images(该文章被引用了891次) 发展:Noakes:非线性与噪声减除2003年; Horocitz:梯度场合控制点2004年; Tang:可信度传递与马尔科夫随机场2005年;Basri:光源条件未知情况下的三维重建2007年;Sun:非朗伯特2007年; Hernandez:彩色光线进行重建方法2007年; Shi:自标定的光度立体视觉法2010年。 3、纹理法(shape from texture SFT) 通过分析图像中物体表面重复纹理单元的大小形状,恢复出物体法向深度等信息,得到物体的三维几何模型。
改进ASIFT算法的PMVS三维重建 PMVS 3D reconstruction with improved Asift algorithm Pu Yangguang (College of Computer and Information Engineering ,Henan University , Kaifeng , Henan 475000 , China ) : The feature point detection and matching ability of multi-view-based three-dimensional reconstruction are poor , and the commonly used Harris and SIFT algorithms can detect and match fewer feature points , and the number of incorrectly matched feature points is large. Combining the adaptive scaling optimization algorithm based on Bicular algorithm with Harris algorithm to improve the Asift algorithm is proposed. The improved algorithm BH-Asift ( Bicular Harris-Asift ) is applied to the multi-view 3D reconstruction system based on PMVS. The improved algorithm has stronger ability of feature points detection and matching , and the final 3D model generated is more realistic. 0 引言近年?砘?于多视图的三维重建技术逐渐走向成熟。LM Shi 等人 [1] 提出了一种通过对三维重建过程中场景几何信息正常性 估计和多分辨率扩展的改进算法,提高了基于PMVS三维重建场
SAR立体三维重建 : ******* 学号: *********
班级: ************* 指导教师: ****** 1实验目的 1、理解基于合成孔径雷达立体像对的灰度信息进行三维重建的基本原理与方法; 2、了解ERDAS IMAGINE的基本功能,熟练掌握StereoSAR模块的使用方法; 3、理解SAR传感器几何模型及基于地面控制点(Ground Control Points, GCPs)几何模型精化的原理与方法; 4、通过真实SAR像对的数据处理,掌握SAR立体三维重建的基本流程。 2实验数据说明 本实验采用ERDAS IMAGINE软件的示例数据,RADASAT影像StereoSAR_Ref.img和StereoSAR_Match.img,这两景影像分别拍摄于1996年9月24日和1996年9月17日。 3实验原理 经过试验九的操作,使我们对InSAR提取测区DEM有了一定的掌握。而摄影测量中我们也学习了基于立体像对制作测区三维景观图,因此在此次实验中我们利用摄影测量的原理基于SAR影像进行三维重建。 3.1 SAR立体图像的获取 立体图像在摄影测量中称为立体相对。所谓立体相对是由不同摄站摄取的具有一定重叠的两相片。因此雷达立体图像也可以定义为:由天线位置探测获取的具有一定影像重叠的两幅雷达图像[1]。
雷达立体图像的获取方式有两种:同侧立体观测和异侧立体观测。前者是指飞行器沿着不同的航线飞行(两次飞行方向可以相同或者相反),雷达从地物的一侧对同一地区成像,同侧立体观测有可分为同一高度和不同高度两类;异侧立体观测是指雷达从地物的两侧分别对同一地区成像。 图 3.1-1 雷达立体图像获取方式 异侧立体观测获取的雷达立体图像视差明显,基高比(摄影基线与航高之比)大,有利于提高地物目标点高程的测量精度。但是地形起伏较大的地区,目标地物在立体像对的两幅图像上的相应影像不仅颜色差异很大,而且由于地形起伏引起的几何变形差异也很大。因为高出地面地物目标的左侧向着左航线的雷达天线,有效反射面积大,影像为浅色调;而对于右航线,该地物目标左侧反射信号弱或者为盲区,所以影像为深色调。同理,地物目标右侧在两幅图像上的色调与地物目标左侧色调刚好相反,由于异侧飞行所获取的雷达立体图像,使一幅图像上的阴影位于地物目标的一侧,而另一幅图像上的阴影在地物目标的另一侧,这就给立体观察与测量带来了极大的困难。另外,采用斜距显示的雷达图像由于地形起伏的影响,同一地物目标在立体像对的两幅图像上的变形差异也很大。因此,异侧(对侧)获取的雷达立体图像,只适于平坦或丘陵而不适合山地的立体观察与测量[2]。 同侧同高度或者不同高度获取的雷达立体图像,视差和基高比虽然比异侧获取的雷达立体图像要小,但两幅图像上相应影像的色调和图像变形差异较小,只要对雷达工作参数进行适当选择,还是能获得较好的立体效应的,故在丘陵地、山地一般都采用同侧获取雷达立体图像进行地物目标的三维定位和立体测图[2]。 3.2 SAR立体图像的视差
第19卷哈尔滨师范大学自然科学学报 V ol.19,N o.52003 第5期 NAT URA L SCIE NCES JOURNA L OF H AR BI N NORM A L UNI VERSITY 几种三维重建方法的比较3 尚明姝 解 凯 (哈尔滨师范大学) 【摘要】 本文综述了三维重建的若干方法,并分析比较了各种方法的特点,同时 还给出了在欧氏几何下一种简单摄像机配置下的三维重建空间点的简单方法1此外给出了通过矩阵分解的办法来推导基本矩阵F 的方法1 关键词:三维重建;摄影重建;基本矩阵 收稿日期:2003-09-04 3本课题是黑龙江省教育厅科技资金(10531085)、哈师大校基金资助项目 1 三维重建的意义 客观世界在空间上是三维的,在工程技术界一般要对三维物体进行分析,以便获取有用的信息1目前,大多数图像采集装置所获取的图像本身是在二维平面上的,尽管其中可以含有三维物体的空间信息1因此,要从图像认识真实物体,就要从二维图像中恢复三维空间信息,这正是三维立体重建所要完成的任务1 2 三维重建的若干方法 211 欧氏几何意义下三维重建的一般方法 欧氏几何下三维重建的一般方法是在摄像机已定标情况下,从重建空间点开始,由三维顶点计算空间直线、空间二次曲线,由计算出的空间直线重组三维面、二次曲面,最后由计算出的三维平面、二次曲面重建三维实体121111 空间点的重建 空间物体表面是由三维点构成的,若能获得足够多的三维点,三维物体的形状与位置就可唯一确定1因此,用立体视觉的方法获得三维点的坐标是最基本的、最简单的,但也是十分重要的1 假定对应空间点的两个摄像机上的图像点已 从两幅图像中分别检测出来,两个摄像机已标定, 其投影矩阵已知1通过列出空间点在图像上投影 点坐标(u ,v )与世界坐标系(x ,y ,z )的关系,得出方程组,解出此空间点在世界坐标系下的坐标1 为了更清楚地了解点重建的物理意义,在文献[1]中给出了一种简单摄像机配置下空间点重建方法1以下作者将给出另一种简单摄像机配置下三维重建的简单方法1 如图1、2所示,原摄像机配置为:C 1与C 2摄像机的焦距相等,各内部参数也相等,且两个摄像机的光轴互相平行,X 轴互相重合,Y 轴互相平行,两个摄像机坐标系只差X 轴方向上的一个平移,平移距离记为b.现将左摄像机绕Y 轴顺时针转θ角,右摄像机逆时针转θ角,以左摄像机坐标系为世界坐标系1 在图2所示配置下,任一空间点在C 1坐标系下坐标为(x 1,y 1,z 1),在C 2坐标系下坐标为(x 2,y 2,z 2),其中,(x 1,y 1,z 1)与(x 2,y 2,z 2)关系如下 : 转换为方程:
选手编号—— 锥束CT图像伪影和校正方法综述 摘要:CT技术在工业无损检测、医学、农产品品质检测、安检等领域发挥着重要的作用。在X 射线检测中,准确把握各个环节的物理特性是非常必要的,CT系统重建图像存在各种伪影。本文系统介绍了锥束CT图像伪影的种类及形成原因,针对这些图像伪影,根据近些年文献中主要的校正方法,对这些校正方法做了比较和小结。 关键词:锥束CT;CT图像;伪影;校正 The Review of Reasons and Correction Methods for Artifacts in cone beam CT Images Abstract: CT technology plays a great role in industrial non-destructive tests, medical fields, and public security, etc. It is essential to know well the physical response of the CT system in the X-ray detection. In this paper, kinds of reasons and correction methods of artifacts are summarized based on the recent literatures, and some comparison and discussion is done. Keywords: cone-beam CT; CT image; artifact; calibration 1 引言 CT(Computerized Tomography)的全称为计算机层析成像技术或计算机断层扫描技术,是数学、物理学和计算机等多个学科交叉发展的产物,是一种在不破坏或改变物体自身结构的前提下,根据获取穿过物体的某些物理量(如电子束、强波速、X射线等)的投影数据,然后转化为可见光图像,再通过CT图像重建可以获得物体特定层面上的二维图像,最后依据一系列上述二维图像构成三维图像的技术[1]。目前美日等发达国家工业CT已经进入应用阶段,在微小结构内视分析、维几何模型重构、三维材料模型重构、试验过程三维监控等领域发挥了作用;国内起步较晚,目前大部分还处于研制阶段。 工业CT技术能紧密、准确地再现物体内部的三维立体结构,能定量地提供物体内部的物理、力学特性,如缺陷的位置及尺寸、密度的变化及水平,异型结构的形状及精确尺寸,物体内部的杂质及分布等。但是,由于被检测对象内部构造、CT系统的设计和重建算法等因素,断层图像往往会出现伪影,影响对图片的判断,严重时甚至会引起误判。断层图像质量的好坏直接影响着CT的检验效果,伪影的存在极大地限制了CT优势的发挥,因此正确认识造成伪影的原因并对其进行校正,是CT系统达到使用阶段必须解决的难题。
电子科技大学 UNIVERSITY OF ELECTRONIC SCIENCE AND TECHNOLOGY OF CHINA 专业学位硕士学位论文MASTER THESIS FOR PROFESSIONAL DEGREE 论文题目医学影像三维重建系统的研究与实现 专业学位类别工程硕士 学号 201322070532 作者姓名 卢开文 指导教师蒲立新副教授
分类号密级 UDC注1 学 位 论 文 医学影像三维重建系统的研究与实现 (题名和副题名) 卢开文 (作者姓名) 指导教师 蒲立新 副教授 电子科技大学 成 都 (姓名、职称、单位名称) 申请学位级别 硕士 专业学位类别 工程硕士 工程领域名称 控制工程 提交论文日期2016年4月28日论文答辩日期2016年5月9日学位授予单位和日期 电子科技大学2016年6月28日答辩委员会主席 邹见效 评阅人 金卫 王子斌 注1:注明《国际十进分类法UDC》的类号。
RESEARCH AND IMPLEMENTAION OF MEDICAL IMAGE 3D RECONSTRUCTION SYSTEM A Master Thesis Submitted to University of Electronic Science and Technology of China Major: Master of Engineering Author: Lu Kaiwen Advisor: Pu Li-xin School : School of Automation Engineering
独创性声明 本人声明所呈交的学位论文是本人在导师指导下进行的研究工作及取得的研究成果。据我所知,除了文中特别加以标注和致谢的地方外,论文中不包含其他人已经发表或撰写过的研究成果,也不包含为获得电子科技大学或其它教育机构的学位或证书而使用过的材料。与我一同工作的同志对本研究所做的任何贡献均已在论文中作了明确的说明并表示谢意。 作者签名:日期:年月日 论文使用授权 本学位论文作者完全了解电子科技大学有关保留、使用学位论文的规定,有权保留并向国家有关部门或机构送交论文的复印件和磁盘,允许论文被查阅和借阅。本人授权电子科技大学可以将学位论文的全部或部分内容编入有关数据库进行检索,可以采用影印、缩印或扫描等复制手段保存、汇编学位论文。 (保密的学位论文在解密后应遵守此规定) 作者签名:导师签名: 日期:年月日
一、引言核医学影像设备如单光子断层扫描仪(SinglePositronEmissionComputeTomography,SPECT)、正电子发射断层扫描仪(PositronEmissionTomo-graphy,PET)融合了当今最高层次的核医学技术,是目前医学界公认的极为先进的大型医疗诊断成像设备,在肿瘤学、心血管疾病学和神经系统疾病学研究中,以及新医药学开发研究等领域中已经显示出它卓越的性能。随着核医学断层影像设备的广泛应用和计算机技术的迅速发展,图像重建方法作为该类设备中的一个关键技术,其研究工作越来越受到人们的重视。本文概述了传统的图像重建方法,并详细介绍了一种具有较高图像质量和较短计算时间的重建算法—有序子集最大期望值方法(Ord-eredSubsetsExpectationMaximization,OSEM)在核医学影像设备中的应用。二、传统的图像重建方法在核医学影像设备中,需要根据物体某一层面在不同探测器上检测到的投影值来重建该断层图像层面,即二维图像重建。传统的图像重建方法主要分为解析法和迭代法。解析法是以中心切片定理(CentralSliceTheorem)为理论基础的求逆过程。常用的一种解析法称为滤波反投影法(FilteredBack-Projection,FBP)。FBP法首先在频率空间对投影数据进行滤波,再将滤波后的投影数据反投影得到重建断层图像。滤波器选为斜坡函数和某一窗函数的乘积,窗函数用于控制噪声,其形状权衡着统计噪声和空间分辨。常用的窗函数有Hanning窗,Hamming窗,Butterworth窗以及Shepp-Logan窗。解析法的优点是速度快,可用于临床实时断层重建。但当测量噪声较大或采样不充分时,这类算法的成像效果不甚理想,尤其是在核医学断层图像重建中对小尺寸源的成像效果差(即所谓偏体积效应)。在滤波中如果对高频信号不做抑制,截止频率高,此时空间分辨最好,但所重建的图像不平滑,易产生振荡和高频伪影;反之,采用较低截止频率,过多压抑高频成分的低通窗函数会造成重建图像的模糊,故在变换法中低噪声和高分辨对滤波器的要求是矛盾的,需折衷选择。且难以在重建中引入各种校正和约束,如衰减校正等。迭代法是从一个假设的初始图像出发,采用迭代的方法,将理论投影值同实测投影值进行比较,在某种最优化准则指导下寻找最优解。迭代求解方法的基本过程是: (1)假定一初始图像f(0); (2)计算该图像投影d; (3)同测量投影值d对比; (4)计算校正系数并更新f值; (5)满足停步规则时,迭代中止; (6)由新的f 作为f(0)从(2)重新开始。该方法最大优点之一是可以根据具体成像条件引入与空间几何有关的或与测量值大小有关的约束和条件因子,如可进行对空间分辨不均匀性的校正、散射衰减校正、物体几何形状约束、平滑性约束等控制迭代的操作。其中实现对比的方法有多种,施加校正系数的方法也有多种。在某些场合下,比如在相对欠采样、低计数的核医学成像中可发挥其高分辨的优势。但是迭代法收敛速度慢,运算时间长,运算量大,而且重建图像会随着迭代次数的增加而趋于“老化”甚至发散,出现高频伪影,这些缺点极大地限制了它在临床中的应用。 [!--empirenews.page--]三、OSEM迭代算法为了加快收敛速度,减少运算时间,提高图像质量,人们提出了很多快速算法,其中有序子集最大期望值法是很有应用前景的一种快速迭代重建算法,它是在最大似然期望法(MaximumLike-lihoodExpectationmaximization,MLEM)的基础上发展起来的。 MLEM方法旨在寻找与测量的投影数据具有最大似然性(ML)的估计解,其迭代过程是由最大期望值算法(EM)来实现的。由于是以统计规律为基础,MLEM重建法具有很好的抗噪声能力,是目前公认为最优秀的迭代重建算法之一,尤其是在处理统计性差的数据时,更能显示出它相对于解析法的优越性,但是这种方法仍然存在迭代法的运算量大、运算时间长等缺点。MLEM方法在每一次迭代过程中,使用所有的投影数据对重建图像每一个象素点的值进行校正,重建图像只被替换一次。 OSEM方法在每一次迭代过程中将投影数据分成N个子集,每一个子集对重建图像各象素点值校正以后,重建图像便被更新一次,所有的子集运算一遍,称为一次迭代过程,它所需要的运算时间与FBP重建的时间基本相等。在ML-EM方法一次迭代过程中,重建图像被更新一次,而在OSEM方法中重建图像被更新N次,所以OSEM方法具有加快收敛的作用。
医学图像三维重建中的关键算法 罗东礼,徐大宏,赵于前 (中南大学信息物理工程学院生物医学工程研究所,长沙410083) 摘要:本文主要讨论了基于序列图像的三维重建中的两个关键算法:特征数据点列的重采样算法与三角化算法。本文把Douglas-Peucker线性简化算法应用在特征边界的重采样上,数据的压缩比得到了明显的改善,也显著地提高了可视化速度。并使用一种简单的三角化算法,对重采样后的数据点列进行三角化,实现目标的三维重建。 关键词:图像序列,三维重建,重采样,三角化 The Algorithm about 3D Reconstruction of Image Sequences Luo Dongli,Xu Dahong,Zhao Yuqian (Institute of biomedical Engineering, School of Info-Physics Geomatics Engineering, CSU, Changsha 410083) Abstract This paper discusses two important algorithms in 3D reconstruction of image sequences, i.e. re-sampling algorithm and triangulation algorithm. An improved algorithm for Doulas-Peucker Line-Simplification is presented. This algorithm can improve the performance of re-sampling and 3D data field visualization. Triangulation is implemented by using a simple triangulation algorithm. Sequentially, 3D object reconstruction is achieved. Keywords Image Sequence, 3D Reconstruction, re-sampling, Triangulation 0 引言 随着计算机软硬件技术,以及医学成像技术的日益发展,基于数字图像技术的医学应用系统也逐渐得到了长足的发展。在这些医学应用系统中,在有效精确地提取出医学图像中相应目标特征量的基础上,进行人体组织或器官的三维重建[1,2],是很多实用系统的基础,如基于图像的病理分析[3]、基于图像的手术导引与增强[4,5,6,8]、虚拟手术平台[7]等应用系统,因此医学图像的三维重建一直是国内外医学界及图像领域的研究与应用热点之一。 三维重建的目的是从一系列二维切片数据(图像)中得到物体的三维表示,一般使用网格的形式来表示。目前,三维重建过程中经常延用的一种经典算法是Lorensen等人于1987年提出的Marching Cubes方法[10],其原理简单,易于实现。但这种方法计算效率低,输出的三角网格数量巨大。因此近些年来,仍然有研究者们从不同角度对该算法进行改进[9,11,12]。本文在文献[13]的基础上提出了一种改进重采样算法结合文献[9]基于轮廓的三维重建方法,运用并改进了相关算法,与直接运用文献[9]所提出的算法相比较,本文所提出并改进的方法处理速度更快,输出的三角网格数量也较少,而且三角网格的形态也比较理想。 在第1小节中对算法作了描述,第2小节总结并分析了本文所提出方法的一些性能。 1 算法描述 作者实现基于序列图像三维重建的主要思路如下: (1) 特征提取:在序列图像中提取出需要重建目标的轮廓;