Research and development of electric vehicles for
- 格式:doc
- 大小:52.00 KB
- 文档页数:5
轮毂式电动汽车驱动系统外文文献翻译、中英文翻译、外文翻译The wheel type electric car is a type of electric car thatutilizes a driving system。
There are two main forms of this system: the direct driving type ___。
This system is installed on the wheel hub of the motor。
___。
n。
main cer。
___。
it allows for the ___。
making electric control technology possible。
As a result。
the wheel type electric car is expected to e the ___ electric cars.2.Advantages and disadvantagesThe wheel type electric car has many advantages。
First。
it has a simple and compact structure。
Second。
it has high n efficiency。
which improves the overall performance of the car。
Third。
it has good ___。
it has a low noise level。
However。
there are also some disadvantages。
First。
the cost of the wheel type electric car is relatively high。
Second。
the maintenance costis also high。
Third。
the wheel type electric car has ___.The wheel type electric car has a simple and compact structure。
关于比亚迪的英文作文Byd is a Chinese automobile manufacturer that has gained significant recognition in recent years. The company has made great strides in the development of electric vehicles, which have become increasingly popular worldwide. Byd's commitment to sustainability and innovation sets it apart from other car manufacturers.Byd's electric vehicles offer numerous advantages over traditional gasoline-powered cars. Firstly, they are environmentally friendly, emitting zero tailpipe emissions. This not only helps to reduce air pollution but also contributes to the fight against climate change. Additionally, electric vehicles are more energy-efficient, allowing drivers to save money on fuel costs. Byd's focus on electric vehicles reflects its dedication to creating a greener future.In addition to its electric vehicles, Byd also produces a wide range of other vehicles, including hybrid cars andbuses. This diversification showcases the company's ability to adapt to different market demands and cater to various customer needs. Byd's commitment to providing a comprehensive range of vehicles demonstrates its determination to become a leading player in the global automotive industry.Byd's success can also be attributed to its emphasis on research and development. The company invests heavily in technological advancements, constantly striving to improve the performance and efficiency of its vehicles. Byd's dedication to innovation has resulted in the development of cutting-edge technologies, such as its proprietary Blade Battery, which offers enhanced safety and longer range. Byd's continuous pursuit of excellence ensures that its vehicles remain at the forefront of the industry.Furthermore, Byd has established partnerships with various international companies, further expanding its global presence. These collaborations enable Byd to tapinto new markets and gain valuable insights from industry leaders. Byd's ability to form strategic alliancesdemonstrates its ambition to become a global leader in the automotive industry.In conclusion, Byd is a Chinese automobile manufacturer that has made significant strides in the development of electric vehicles. Its commitment to sustainability, diversification of products, emphasis on research and development, and strategic partnerships have contributed to its success. Byd's innovative approach to the automotive industry sets it apart from its competitors and positionsit as a key player in the global market.。
对政府发展新能源汽车的建议英语作文全文共10篇示例,供读者参考篇1Dear government,I have some ideas for you to develop new energy vehicles. I think it's super important to use cleaner energy for cars because it can help protect our Earth and make the air cleaner. Here are some suggestions for you to consider:First, I think you should make more charging stations for electric cars. It's really hard to find a place to charge the car right now, so if there were more charging stations, more people might be willing to drive electric cars. And maybe you could make the charging stations look really cool, like they're from the future or something.Second, I think you should give people more incentives to buy electric cars. Like, maybe you could give them a discount on their taxes if they drive an electric car. Or maybe you could give them free parking in some places. I think if people see that there are benefits to driving electric cars, they might be more likely to buy one.Third, I think you should work with car companies to make more affordable electric cars. Right now, electric cars are really expensive, so a lot of people can't afford them. If you could help make electric cars more affordable, more people might be able to buy them.Overall, I think developing new energy vehicles is a great idea. I hope you can use my suggestions to help make it happen. Thank you for listening!Sincerely,[Your name]篇2Dear government,I have a suggestion for you about developing new energy vehicles. I think it's really important to focus on these cars because they can help our environment and save energy.First of all, I think you should encourage people to buy new energy vehicles by giving them more incentives. For example, you could offer tax breaks or discounts on the price of the car. This would make it easier for people to afford these vehicles and would encourage more people to buy them.Secondly, I think you should invest more in building charging stations for new energy vehicles. It can be really hard for people to find a place to charge their cars, especially if they live in a place without a lot of charging stations. By building more stations, you can make it easier for people to use these cars and encourage more people to buy them.Lastly, I think you should work with car manufacturers to make new energy vehicles more affordable. Right now, these cars can be really expensive to buy, which makes it hard for many people to afford them. By working with manufacturers to lower the cost of these cars, you can make it easier for more people to buy them and help the environment.I hope you will consider my suggestions and work to develop new energy vehicles. Thank you for listening.Sincerely,(Your name)篇3Hey guys, do you know that our government is working on developing new energy vehicles? It's super cool because these cars are better for the environment and can help reducepollution. But I think there are some things the government can do to make them even better!First, I think the government should invest more money in research and development of new energy vehicles. This way, we can make sure that these cars are as efficient and affordable as possible. It would also be great if the government could provide more incentives for people to buy new energy vehicles, like tax breaks or subsidies.Second, I think the government should work on building more charging stations for new energy vehicles. This way, people can easily charge their cars wherever they go, just like filling up gas in a regular car. It would also be awesome if the government could promote the use of renewable energy sources to power these charging stations, like solar or wind power.Lastly, I think the government should work with car manufacturers to make new energy vehicles more stylish and fun to drive. If these cars look cool and are enjoyable to drive, more people will want to buy them. Plus, it would be awesome if the government could organize events or campaigns to raise awareness about the benefits of new energy vehicles.In conclusion, I think our government is doing a great job in developing new energy vehicles, but there are always ways toimprove. By investing more in research and development, building more charging stations, and making new energy vehicles more attractive, we can help protect our environment and create a cleaner future for all of us. Let's all work together to support the development of new energy vehicles!篇4Hey guys, do you know that the government is trying to develop new energy vehicles to protect our environment? It's super cool, right? But I think we can give them some suggestions to make it even better!First of all, I think the government should invest more money in researching and developing new energy vehicles. This way, they can come up with more advanced and efficient cars that will help reduce pollution and save our planet. They can also provide subsidies to encourage people to buy these cars, so more and more people will start using them.Secondly, I think the government should build more charging stations for new energy vehicles. This way, people won't have to worry about running out of battery while driving. They can also make the charging process faster and moreconvenient, so people can easily charge their cars while shopping or working.Lastly, I think the government should promote new energy vehicles more actively. They can organize events and campaigns to raise awareness about the benefits of using these cars. They can also collaborate with car manufacturers to make the prices more affordable for everyone.In conclusion, I believe that developing new energy vehicles is a great idea, and with our suggestions, the government can make it even better. Let's all work together to protect our environment and build a better future for our planet!篇5Title: My Suggestions for the Government to Develop New Energy VehiclesHi everyone! Today I want to talk about new energy vehicles, which are super cool and important for our environment. I have some suggestions for the government on how they can promote the development of new energy vehicles even more.First of all, I think the government should provide more subsidies for people who want to buy new energy vehicles. Thiswill make it more affordable for everyone and encourage more people to choose clean energy cars. The government can also give tax breaks to companies that produce new energy vehicles, so they can make more of them and sell them at a lower cost.Secondly, the government should build more charging stations for new energy vehicles. Sometimes people worry about running out of power when they drive their electric cars, so having more charging stations will make it easier for them to find a place to charge up. The government can also make sure that these charging stations are powered by renewable energy sources, like solar or wind power.Another suggestion I have is for the government to work with schools to teach kids about new energy vehicles and why they are important. If we learn about them when we are young, we will grow up knowing how to take care of our planet and make smart choices about the cars we drive.Lastly, the government should set stricter regulations on traditional cars that pollute the air. By making it more expensive to drive a car that runs on fossil fuels, more people will choose new energy vehicles instead. This will help reduce air pollution and make our planet healthier for everyone.In conclusion, new energy vehicles are awesome and the government should do more to promote their development. By providing subsidies, building charging stations, educating kids, and setting stricter regulations, we can all work together to protect our environment and make the world a better place. Let’s all drive towards a greener future! Thank you for listening to my suggestions.篇6Yo government, listen up! I've got some awesome ideas for you about developing new energy cars. First off, let's talk about electric cars. They are super cool and eco-friendly because they don't use gas and they don't make pollution. So, how about giving some incentives for people to buy electric cars? Like, maybe you could give them a tax break or something. That way, more people will want to buy electric cars and help save the planet.Next, how about investing more money in research and development for new energy cars? Like, maybe you could give grants to scientists and engineers who are working on making better batteries for electric cars. That way, we could have cars that can go farther without needing to be charged all the time.And maybe we could even have cars that run on solar power or hydrogen fuel cells. That would be so cool!Also, how about building more charging stations for electric cars? Like, maybe you could put them in shopping malls or schools or parks. That way, people can charge their cars while they're doing other stuff and they won't have to worry about running out of power. And maybe you could even make the charging stations free to use. That would be so convenient!So, yeah, government, those are my ideas for developing new energy cars. I hope you like them and I hope you'll put them into action. Let's make the world a better place with awesome new energy cars!篇7Hey guys,I have some really cool ideas on how the government can develop new energy vehicles. New energy vehicles are super important because they help protect our environment and make the air cleaner for us to breathe. So let's get started with my suggestions!First of all, the government should give more money to companies that are making new energy vehicles. This will help them to develop new technology and make the cars more affordable for everyone. It's like giving them a little push to go faster!Secondly, the government should build more charging stations for electric cars. This way, people will feel more confident about driving their electric cars because they know they can charge them up easily. It's like having a gas station, but for electric cars!Next, the government should make some rules to encourage people to buy new energy vehicles. For example, they could give tax breaks to people who buy electric cars, or make it cheaper to register them. This will make more people want to buy new energy vehicles and help the environment.Lastly, the government should work with schools to teach kids about the importance of new energy vehicles. They could have special classes or workshops where we can learn about how these cars work and why they are good for the planet. This way, we can grow up knowing how to take care of the environment.So, that's it for my ideas on how the government can develop new energy vehicles. I really hope they listen to mebecause I think these ideas are super awesome! Let's all work together to protect our planet and make it a better place for everyone.Bye for now!- Your friend, [Your Name]篇8Hey guys, do you know that the government is working on developing new energy vehicles? Cool, right? But do you know what new energy vehicles are? They are cars that run on electricity or other clean energy sources, instead of gasoline. This is really important because it can help reduce air pollution and slow down climate change.I think the government should do more to promote new energy vehicles. For example, they could provide more subsidies for people who buy electric cars. This would make them more affordable for everyone. They could also build more charging stations around the country, so it's easier for people to charge their electric cars when they are out and about.Another thing the government could do is to encourage car companies to make more new energy vehicles. They could givetax incentives to companies that produce electric cars, or even require car companies to make a certain percentage of their cars electric. This would help speed up the transition to new energy vehicles.I also think the government should invest more in research and development of new energy technologies. This could help make new energy vehicles even better and more efficient. Maybe one day we will have cars that can run on solar power or hydrogen fuel cells!Overall, I think the government should really focus on developing new energy vehicles. It's better for the environment, and it's better for our future. Let's all work together to make the world a cleaner, greener place! Thank you for listening.篇9Dear government,I have some cool ideas to make our world better, especially when it comes to developing new energy cars. I think new energy cars, like electric cars, are important because they can help to save the environment and make the air cleaner.First of all, I think the government should give more money to companies that make new energy cars. This way, they can make more cars and cheaper, so more people can buy them. I also think the government should build more charging stations so people can charge their cars easily when they are out and about.Secondly, I think the government should make rules to encourage people to buy new energy cars. For example, they could give tax breaks to people who buy these cars or charge less money for parking. This way, more people will want to buy new energy cars and help the environment.Lastly, I think the government should teach us more about new energy cars in school. They can tell us how they work and why they are better for the environment. This way, we can all learn how important it is to use new energy cars and tell our families about them too.I hope the government will listen to my ideas and do things to make new energy cars more popular. Let's save our planet together!From a little student who loves new energy cars.篇10Hey guys, do you know that the government is trying to develop new energy vehicles like electric cars? It's super cool because it can help save the environment and make our air cleaner! But I think there are some things the government can do to make it even better.First, I think the government should give more incentives to people who buy electric cars. Maybe they can give discounts or tax breaks to encourage more people to switch to electric cars. This way, more people will be willing to give it a try and help reduce pollution.Second, the government should also set up more charging stations for electric cars. It can be a hassle for people to find a place to charge their cars, so having more charging stations will make it more convenient for everyone. Maybe the government can even set up some in public places like schools or parks.Lastly, I think the government should work with car companies to make electric cars more affordable. Right now, electric cars can be pretty expensive, but if they can find a way to make them more affordable, more people will be able to buy them and help protect our environment.Overall, I think the government is doing a great job in developing new energy vehicles, but there's always room forimprovement. If they can listen to our suggestions and make some changes, I believe we can all work together to create a greener and cleaner world for the future. Let's go, electric cars!。
AUTOMOBILE DESIGN | 汽车设计时代汽车 电动汽车动力电池管理系统的设计与研究纪文煜无锡南洋职业技术学院 江苏省无锡市 214081摘 要: 能源危机和生态危机产生的人类生存压力越来越明显,汽车产业受能源危机和生态危机的双重影响,电动汽车的研发俨然是大趋势。
电动汽车的问世减少了环境污染,缓解了生态压力,而其也减少了能源消耗,在解决能源枯竭问题方面有着积极意义。
其研发与应用得益于其电池管理系统的设计优化,这也是新型能源汽车研发中的核心命题。
本文主要就电动汽车所对应的电池管理系统进行设计方面的系统研究,以通过硬件与软件的系优化设计,带来电池管理系统的优化,带来电动汽车研发的新革命,使得其性能逐步提升,助力新能源汽车产业的创新发展。
关键词:电动汽车 动力电池 管理系统 设计分析汽车产业是市场经济中的一大主导产业,其快速发展的背后也引发人类关于生态性问题、能源利用问题的深刻思考,当前生态危机加剧,能源紧张的现实让部分产业发展受限,而汽车产业首当其冲。
鉴于传统汽车产业发展的不足,研究新能源汽车成为备受瞩目的课题,而电动汽车的问世无疑为汽车行业的转型升级带来曙光。
对于电动汽车设计研发和性能发挥、来说,起核心作用的是电池,而其对应的系统设计是重中之重,电池作为其能量源泉,其系统则负责能量来源——电池运行情况的分析、数据的采集、故障的判断、运动控制等,系统性能优劣对汽车安全性和功能性发挥的影响是直接而深刻的。
1 电动汽车动力电池工作原理当前汽车的动力电池多对为金属燃料,主要构成是铝,基于其材料选择和性能循环的优化考虑,电池负极为金属材料,正极则采用泡沫石墨烯,其电解液主要成分是四氯化铝,实现了充放电的有效循环,即使在常温条件下也可以正常循环运作。
其正极所对应的石墨烯材料属于典型的层状材料,其能有效容纳阳离子,实现电解液内阴离子的容纳,让动力电池放电形成良性循环。
2 电动汽车电池管理系统设计的三大技术支持2.1 参数检测与分析工作参数检测是动力电池管理系统设计中首先要考虑的问题,工作参数检测涵盖多个方面,从工作电力到电压再到电温等,在这些工作参数检测的过程中[1],重点是进行单体电池的电压具体数值的测量,进行电压稳定性分析,以此明确电池工作状态。
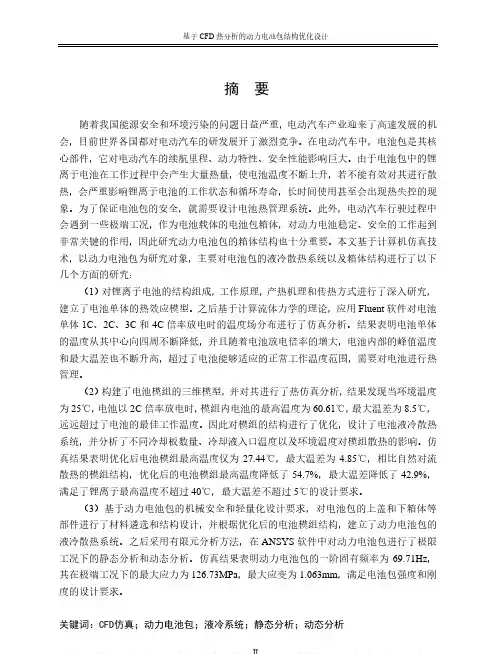
基于CFD热分析的动力电池包结构优化设计摘要随着我国能源安全和环境污染的问题日益严重,电动汽车产业迎来了高速发展的机会,目前世界各国都对电动汽车的研发展开了激烈竞争。
在电动汽车中,电池包是其核心部件,它对电动汽车的续航里程、动力特性、安全性能影响巨大。
由于电池包中的锂离子电池在工作过程中会产生大量热量,使电池温度不断上升,若不能有效对其进行散热,会严重影响锂离子电池的工作状态和循环寿命,长时间使用甚至会出现热失控的现象。
为了保证电池包的安全,就需要设计电池热管理系统。
此外,电动汽车行驶过程中会遇到一些极端工况,作为电池载体的电池包箱体,对动力电池稳定、安全的工作起到非常关键的作用,因此研究动力电池包的箱体结构也十分重要。
本文基于计算机仿真技术,以动力电池包为研究对象,主要对电池包的液冷散热系统以及箱体结构进行了以下几个方面的研究:(1)对锂离子电池的结构组成,工作原理,产热机理和传热方式进行了深入研究,建立了电池单体的热效应模型。
之后基于计算流体力学的理论,应用Fluent软件对电池单体1C、2C、3C和4C倍率放电时的温度场分布进行了仿真分析。
结果表明电池单体的温度从其中心向四周不断降低,并且随着电池放电倍率的增大,电池内部的峰值温度和最大温差也不断升高,超过了电池能够适应的正常工作温度范围,需要对电池进行热管理。
(2)构建了电池模组的三维模型,并对其进行了热仿真分析,结果发现当环境温度为25℃,电池以2C倍率放电时,模组内电池的最高温度为60.61℃,最大温差为8.5℃,远远超过了电池的最佳工作温度。
因此对模组的结构进行了优化,设计了电池液冷散热系统,并分析了不同冷却板数量、冷却液入口温度以及环境温度对模组散热的影响。
仿真结果表明优化后电池模组最高温度仅为27.44℃,最大温差为4.85℃,相比自然对流散热的模组结构,优化后的电池模组最高温度降低了54.7%,最大温差降低了42.9%,满足了锂离子最高温度不超过40℃,最大温差不超过5℃的设计要求。
电动汽车兴起的原因以及建议英语作文Electric vehicles (EVs) have been gaining popularity in recent years due to various reasons. Firstly, the increasing concern for the environment has led people to seek more sustainable transportation options. EVs are powered by electricity, which emits less carbon dioxide than traditional gasoline-powered vehicles, thus reducing air pollution and greenhouse gas emissions.Secondly, technological advancements have made EVs more affordable and efficient. With improvements in battery technology, EVs can now travel longer distances on a single charge and have faster charging times. This makes them a practical choice for daily commutes and long-distance travel.Lastly, governments around the world are implementing policies to encourage the adoption of EVs. Many countries are offering incentives such as tax credits, rebates, and free charging stations to reduce the cost of purchasing an EV and make it more accessible to consumers.In terms of suggestions, there are several ways that we canfurther promote the use of EVs. Firstly, we need to increase public awareness about the benefits of EVs and how they contribute to a cleaner environment. Secondly, we should invest in research and development to improve the performance and efficiency of EVs. Thirdly, we need to create a more comprehensive charging infrastructure to ensure that EV owners have access to reliable and convenient charging options. Finally, we should continue to implement policies that incentivize the adoption of EVs and make them more affordable for consumers.In conclusion, the rise of electric vehicles is driven by environmental concerns, technological advancements, and government policies. By promoting awareness, investing in research and development, creating a comprehensive charging infrastructure, and implementing incentives, we can further promote the use of EVs and help create a more sustainable future.。
推广新能源车的英语作文Title: Promoting the Adoption of New Energy Vehicles。
In recent years, the issue of climate change has become increasingly urgent, prompting a global shift towards more sustainable energy sources. One significant aspect of this transition is the promotion of new energy vehicles (NEVs), which encompass electric, hybrid, and hydrogen fuel cell vehicles. This essay explores the importance of promoting NEVs and discusses various strategies to encourage their widespread adoption.First and foremost, promoting NEVs is crucial for reducing greenhouse gas emissions and mitigating climate change. Traditional internal combustion engine vehicles are major contributors to air pollution and carbon emissions, exacerbating global warming and its adverse effects on the environment. NEVs, on the other hand, produce zero tailpipe emissions when powered by electricity or emit only water vapor in the case of hydrogen fuel cell vehicles. Bytransitioning to NEVs, we can significantly reduce air pollution and curb the detrimental impacts of climate change.Additionally, promoting NEVs contributes to energy security and reduces dependence on finite fossil fuels. Unlike conventional vehicles that rely on gasoline or diesel, NEVs can be powered by electricity generated from renewable sources such as solar, wind, and hydroelectric power. By utilizing domestic renewable energy resources, countries can enhance their energy independence and resilience to supply disruptions. Moreover, the widespread adoption of NEVs can help alleviate concerns about oil depletion and geopolitical tensions associated with fossil fuel extraction and distribution.Furthermore, promoting NEVs presents economic opportunities and fosters innovation in the automotive industry. As the demand for NEVs grows, manufacturers are incentivized to invest in research and development to improve battery technology, increase vehicle range, and reduce costs. This innovation spillover effect can driveadvancements not only in the automotive sector but also in related industries such as renewable energy, energy storage, and smart grid technologies. Moreover, the production and deployment of NEVs create jobs in manufacturing, sales, maintenance, and infrastructure development, stimulating economic growth and prosperity.To effectively promote the adoption of NEVs, governments, businesses, and other stakeholders must implement comprehensive strategies. One key strategy is to provide financial incentives and subsidies to make NEVsmore affordable and competitive with conventional vehicles. These incentives may include purchase rebates, tax credits, and exemptions from vehicle registration fees or road tolls. Additionally, governments can establish regulations and mandates to encourage automakers to produce more NEVs and expand charging infrastructure. This may involve setting emission standards, fuel economy targets, and zero-emission vehicle (ZEV) mandates, as well as investing in public charging stations and incentivizing private charging infrastructure deployment.Moreover, public awareness and education campaigns are essential to dispel myths and misconceptions about NEVs and highlight their benefits. By disseminating accurate information about NEV technology, performance, and cost savings, consumers can make informed decisions when purchasing vehicles. Furthermore, showcasing successstories and testimonials from NEV owners can inspire confidence and encourage others to make the switch to cleaner transportation options.In conclusion, promoting the adoption of new energy vehicles is imperative for addressing climate change, enhancing energy security, and fostering economic growth. By implementing comprehensive strategies and incentives, we can accelerate the transition towards a more sustainable and resilient transportation system. Together, we can drive positive change and create a cleaner, healthier, and more prosperous future for generations to come.。

关于中国大力支持电动汽车的英语作文China has been making significant efforts to promote and support the development of electric vehicles in recent years. With the increasing concerns over environmental pollution and the need to reduce carbon emissions, the Chinese government has recognized the importance of transitioning towards cleaner and more sustainable transportation options.One of the key initiatives that China has implemented to support the electric vehicle industry is the implementation of subsidies and incentives for both consumers and manufacturers. These subsidies have helped to make electric vehicles more affordable for consumers, while also encouraging manufacturers to invest in research and development in this field. In addition, the Chinese government has also set ambitious targets for the production and sales of electric vehicles, further driving growth in the industry.Furthermore, China has been investing heavily in building the necessary infrastructure to support electric vehicles, such as charging stations and battery swap stations. This infrastructure development is crucial in addressing the range anxiety that many consumers have when considering purchasing an electric vehicle. By expanding the network of charging stations and ensuring thatthey are easily accessible, China is helping to create a more conducive environment for the adoption of electric vehicles.In addition to government support, Chinese automakers have also been actively investing in the development of electric vehicles. Companies such as BYD, NIO, and Xpeng have been at the forefront of innovation in the electric vehicle industry, producing vehicles that are not only environmentally friendly but also competitive in terms of performance and features. This has helped to build consumer confidence in electric vehicles and has contributed to the growing popularity of these vehicles in China.The benefits of China's support for electric vehicles extend beyond environmental considerations. The electric vehicle industry is also seen as a strategic opportunity for China to develop its domestic industry and reduce its dependence on foreign oil imports. By investing in electric vehicles, China is not only reducing its carbon footprint but also creating new opportunities for economic growth and innovation.Overall, China's commitment to supporting electric vehicles is a clear demonstration of its dedication to promoting sustainable development and combating climate change. By investing in subsidies, incentives, infrastructure, and domestic production, China is paving the way for a cleaner and moresustainable transportation future. As other countries look to follow suit in transitioning towards electric vehicles, China serves as a prime example of the benefits of government support for this burgeoning industry.。
电车发展英语作文全文共3篇示例,供读者参考篇1The Development of Electric CarsIntroductionThe development of electric cars has been a topic of growing interest and importance in the automotive industry in recent years. As awareness of environmental issues and the need for sustainable transportation solutions has increased, electric cars have emerged as a promising alternative to traditional gasoline-powered vehicles. In this essay, we will explore the history and evolution of electric cars, the current state of the industry, and the potential future of electric vehicles.History of Electric CarsWhile electric cars may seem like a recent innovation, they actually have a long history that dates back to the early 19th century. The first electric vehicle was built in 1832 by Scottish inventor Robert Anderson, who created a crude electric carriage powered by non-rechargeable primary cells. Over the next century, electric cars continued to evolve, with improvements inbattery technology and electric motors leading to the development of more practical and efficient vehicles.One of the major milestones in the history of electric cars was the introduction of the General Motors EV1 in 1996. This electric car was one of the first mass-produced electric vehicles and generated significant interest and excitement among consumers. However, due to various factors, including limited range and high production costs, the EV1 was eventually discontinued in 1999.Current State of the IndustryIn recent years, there has been a resurgence of interest in electric cars, driven by advancements in technology, concerns about climate change, and government incentives to promote clean energy. Major automakers such as Tesla, Nissan, and BMW have all introduced electric vehicles to their lineups, with models that offer improved range, performance, and affordability.The popularity of electric cars has also been boosted by the development of a charging infrastructure, with more charging stations being installed in cities and along highways. This has alleviated concerns about "range anxiety" – the fear of running out of battery power while driving – and has made electric cars more practical and convenient for everyday use.Future of Electric VehiclesLooking ahead, the future of electric vehicles looks promising, with continued advancements in battery technology and the development of new models with longer ranges and faster charging times. Electric cars are also becoming more affordable, thanks to improvements in production processes and economies of scale.In addition to passenger cars, electric vehicles are also being used in other forms of transportation, such as buses, trucks, and even airplanes. This trend towards electrification is expected to have a significant impact on reducing emissions and improving air quality in urban areas, where transportation is a major source of pollution.ConclusionIn conclusion, the development of electric cars represents a significant shift in the automotive industry towards cleaner and more sustainable transportation solutions. While there are still challenges to overcome, such as the need for more widespread charging infrastructure and lower production costs, the future looks bright for electric vehicles. By embracing this technology and investing in its continued development, we can create amore sustainable and environmentally friendly future for generations to come.篇2The Development of Electric CarsWith the increasing concerns about environmental issues and the depletion of fossil fuels, electric cars have become a popular alternative to traditional gasoline-powered vehicles. The development of electric cars has advanced rapidly in recent years, with major car manufacturers investing heavily in research and development to produce more efficient and affordable electric vehicles.One of the key benefits of electric cars is their sustainability. By running on electricity instead of gasoline, electric cars produce zero emissions, reducing air pollution and greenhouse gas emissions. This is particularly important in urban areas where air quality is a major concern. In addition, electric cars are more energy-efficient than traditional vehicles, as electric motors are more efficient than internal combustion engines.The advancement of battery technology has also played a crucial role in the development of electric cars. Lithium-ion batteries, which are commonly used in electric cars, havebecome more affordable and have greater energy density, allowing electric cars to travel longer distances on a single charge. The development of fast-charging technology has also made it easier for electric car owners to recharge their vehicles quickly and conveniently.Furthermore, the increasing demand for electric cars has led to a more diverse range of electric vehicle options available to consumers. From compact city cars to luxury electric SUVs, there is now a wide variety of electric cars to choose from, catering to different needs and preferences. This has helped to popularize electric cars and increase their market share in the automotive industry.In terms of infrastructure, many countries are investing in building more charging stations to support the growing number of electric vehicles on the road. This has helped to alleviate range anxiety and make it more convenient for electric car owners to recharge their vehicles while on the go. Some countries are also offering incentives and subsidies to encourage more people to switch to electric cars, such as tax credits, rebates, and free parking for electric vehicles.Despite the many benefits of electric cars, there are still challenges that need to be addressed to further promote theiradoption. One of the main challenges is the limited range of electric cars compared to gasoline-powered vehicles, which can make long-distance travel more difficult. However, advancements in battery technology and the expansion of charging infrastructure are helping to address this issue.In conclusion, the development of electric cars has come a long way in recent years, with advancements in technology and infrastructure making electric vehicles more practical and accessible to consumers. As the demand for electric cars continues to grow, it is likely that we will see further innovations in the electric vehicle industry, leading to more sustainable and environmentally friendly transportation options for the future.篇3The Development of Electric VehiclesIn recent years, the development of electric vehicles (EVs) has gained significant momentum as the world seeks to reduce greenhouse gas emissions and combat climate change. Electric vehicles, powered by electricity instead of gasoline, have the potential to significantly reduce air pollution and dependence on fossil fuels. In this essay, we will explore the current state of electric vehicle development, the challenges and opportunitiesfacing the industry, and the potential impact of electric vehicles on the environment and society.The global electric vehicle market has been growing steadily in recent years, with major automakers investing heavily in research and development to bring EV technology to the mass market. Companies like Tesla, Nissan, and General Motors have launched successful electric vehicle models that have gained popularity among consumers. Governments around the world are also introducing policies and incentives to promote the adoption of electric vehicles, such as tax credits, rebates, and infrastructure investments. As a result, the number of electric vehicles on the road is expected to increase significantly in the coming years.One of the main challenges facing the electric vehicle industry is the high cost of EVs compared to traditional gasoline-powered vehicles. While the price of electric vehicles has been decreasing over time, they are still more expensive to purchase than gasoline cars. This cost barrier has been a major deterrent for many consumers, especially in developing countries where EV infrastructure is still limited. In addition, the range of electric vehicles is a concern for some consumers, asthey may be worried about running out of battery power on long journeys.Despite these challenges, there are significant opportunities for the electric vehicle industry to grow and thrive in the coming years. Advances in battery technology are making electric vehicles more efficient and affordable, with longer driving ranges and faster charging times. Companies are also investing in the development of electric trucks, buses, and even airplanes, which could further reduce emissions and create new opportunities for sustainable transportation. Governments and businesses are also working together to build EV charging infrastructure and develop renewable energy sources to power electric vehicles, further reducing their environmental impact.The impact of electric vehicles on the environment and society could be transformational. By transitioning from gasoline-powered vehicles to electric vehicles, we can significantly reduce greenhouse gas emissions and air pollution, leading to cleaner air and improved public health. Electric vehicles also have the potential to create new jobs in the clean energy sector and stimulate economic growth. The widespread adoption of electric vehicles could also reduce our dependenceon imported oil and increase energy security for countries around the world.In conclusion, the development of electric vehicles represents a significant opportunity to create a more sustainable and environmentally friendly transportation system. While there are challenges to overcome, the electric vehicle industry is poised for rapid growth in the coming years. By investing in research and development, building EV infrastructure, and promoting policies that support electric vehicles, we can accelerate the transition to a cleaner, more sustainable future. The development of electric vehicles is not just a technological achievement, but a crucial step towards a more sustainable and prosperous society for future generations.。
开发电动汽车英语作文The Future of Mobility: Developing Electric VehiclesThe transportation sector is undergoing a significant transformation, driven by the growing need to address the environmental and sustainability challenges posed by traditional internal combustion engine vehicles. As the world becomes increasingly conscious of the impact of greenhouse gas emissions and the depletion of fossil fuels, the development of electric vehicles (EVs) has emerged as a promising solution to revolutionize the way we move.Electric vehicles, powered by rechargeable battery packs and electric motors, offer a clean and efficient alternative to their gasoline-powered counterparts. The advantages of EVs are numerous and far-reaching, making them a crucial component in the pursuit of a sustainable future.One of the primary benefits of electric vehicles is their environmental impact. Traditional internal combustion engines are responsible for a significant portion of global greenhouse gas emissions, contributingto climate change and air pollution. Electric vehicles, on the other hand, produce zero direct emissions, making them a much cleaner mode of transportation. By reducing the reliance on fossil fuels, EVs can help mitigate the environmental damage caused by the transportation sector and play a vital role in the transition towards a more sustainable future.In addition to their environmental benefits, electric vehicles also offer significant cost savings for consumers. While the initial purchase price of an EV may be higher than a traditional gasoline-powered vehicle, the long-term operational costs are significantly lower. Electricity is generally less expensive than gasoline, and the maintenance requirements for electric vehicles are typically lower due to the simplicity of their powertrain. Furthermore, many governments around the world offer various incentives and subsidies to encourage the adoption of electric vehicles, further reducing the financial burden on consumers.The development of electric vehicles also presents an opportunity to revolutionize the way we think about transportation. Unlike traditional vehicles, EVs can be integrated into a smart grid, allowing for bidirectional energy flow. This means that electric vehicles can not only draw power from the grid to charge their batteries but also potentially feed energy back into the grid, providing a valuable resource for load balancing and energy storage. This integration withthe smart grid can help to improve the overall efficiency and stability of the electrical infrastructure, paving the way for a more sustainable and resilient energy system.Furthermore, the rise of electric vehicles has spurred the development of advanced battery technologies. Lithium-ion batteries, the primary energy storage solution for EVs, have undergone significant improvements in terms of energy density, charging speed, and overall performance. As research and development in battery technology continues to advance, the range and capabilities of electric vehicles are expected to improve, making them more practical and appealing for a wider range of consumers.The development of electric vehicles is also driving innovation in the automotive industry. Automakers are investing heavily in the research and development of EV technologies, leading to the introduction of a growing number of electric models across various vehicle segments. This competition and innovation are driving down the costs of electric vehicles, making them more accessible to a broader consumer base.Moreover, the development of electric vehicles is closely linked to the advancement of autonomous driving technology. Many of the same sensors and computing power required for autonomous driving are also essential for the efficient operation of electricvehicles. As these technologies converge, the potential for a future of fully autonomous, electric transportation becomes increasingly within reach.However, the widespread adoption of electric vehicles is not without its challenges. One of the primary obstacles is the availability and accessibility of charging infrastructure. While the number of public charging stations has been steadily increasing, the lack of a comprehensive and reliable charging network can still be a deterrent for some consumers. Addressing this issue will require significant investment and coordination between governments, automakers, and energy providers to ensure that the charging infrastructure can keep pace with the growing EV market.Another challenge is the need to address the environmental impact of the manufacturing and disposal of electric vehicles. While EVs themselves are environmentally friendly during operation, the production of the vehicles and their batteries can have a significant carbon footprint. Efforts are being made to address this issue, such as the development of more sustainable manufacturing processes and the recycling of battery materials.Despite these challenges, the development of electric vehicles remains a crucial step in the transition towards a more sustainable transportation future. As governments, automakers, and consumerscontinue to embrace the benefits of electric mobility, the future of transportation is poised to undergo a profound transformation.In conclusion, the development of electric vehicles represents a pivotal moment in the history of transportation. By addressing the environmental, economic, and technological challenges posed by traditional internal combustion engine vehicles, the rise of EVs holds the promise of a cleaner, more efficient, and more sustainable future for mobility. As the world continues to grapple with the pressing issues of climate change and resource depletion, the development of electric vehicles stands as a testament to the power of innovation and collective action in shaping a better tomorrow.。
中考英语新能源的技术创新与发展单选题40题1. We can get clean energy from _____.A.coalB.oilC.solar powerD.wood答案:C。
本题考查新能源的类型。
选项A“coal( 煤炭)”、选项B“oil(石油)”和选项D“wood(木材)”都不是新能源,而是传统能源。
选项C“solar power 太阳能)”是新能源之一,它具有清洁、可再生的特点。
2. Which one is a new energy source?A.natural gasB.hydroelectric powerC.gasolineD.diesel答案:B。
选项A“natural gas(天然气)”、选项C“gasoline(汽油)”和选项D“diesel(柴油)”都不是新能源。
选项B“hydroelectric power( 水力发电)”是新能源的一种,它利用水流的能量转化为电能,是清洁、可再生的能源。
3. New energy is important because it is _____.A.pollutingB.expensiveC.clean and renewableD.rare答案:C。
新能源重要是因为它具有清洁和可再生的特点。
选项A“polluting(污染的)”不符合新能源的特点;选项B“expensive(昂贵的)”不是其重要的主要原因;选项D“rare 稀少的)”也不准确。
4. In daily life, we can see _____ used as new energy.A.wind turbinesB.fossil fuelsC.nuclear reactorsD.coal mines答案:A。
在日常生活中,我们可以看到风力涡轮机被用作新能源。
选项B“fossil fuels 化石燃料)”不是新能源;选项C“nuclear reactors 核反应堆)”虽然能产生能源,但不属于新能源范畴;选项D“coal mines 煤矿)”是传统能源的来源,不是新能源。
新能源汽车英语作文In recent years, the automotive industry has witnessed a significant shift towards the development and adoption of new energy vehicles (NEVs). These vehicles, which includeelectric cars, plug-in hybrids, and fuel cell vehicles, are poised to revolutionize transportation, offering a cleaner, more sustainable alternative to traditional fossil fuel-powered cars.The primary motivation behind the push for NEVs is the urgent need to reduce greenhouse gas emissions and combat climate change. As the world grapples with the effects of global warming, NEVs present a viable solution to decrease our carbon footprint. Electric vehicles, for instance, produce zero tailpipe emissions, contributing to improved air quality in urban areas.Technological advancements have played a crucial role in the evolution of NEVs. Improvements in battery technology have led to increased driving ranges, making electric cars more practical for everyday use. Additionally, the development of fast-charging infrastructure is addressing the concern of longer charging times, which was a significant barrier to the widespread adoption of NEVs.Governments around the world are supporting the transition to NEVs through various incentives and regulations. Financial incentives such as tax rebates and grants are offered toencourage consumers to purchase electric vehicles. Moreover, stringent emission standards are being imposed on traditional vehicles, making NEVs a more attractive option for both consumers and manufacturers.However, the transition to NEVs is not without its challenges. The establishment of a comprehensive charging network is essential for the widespread adoption of electric vehicles. Additionally, the increased demand for electric vehiclescould strain the power grid, necessitating upgrades and smart grid technology to manage peak charging times.The future of transportation is electric, and the automotive industry is gearing up for this transition. Major automakers are investing heavily in the research and development of NEVs, with some even setting targets to phase out internal combustion engine vehicles in the coming decades.In conclusion, new energy vehicles are an essential step towards a more sustainable and environmentally friendly future. As technology continues to advance and support from governments and the private sector grows, we can expect tosee a significant increase in the number of NEVs on the road, leading to a greener, cleaner tomorrow.。
电动汽车的开发受到政府重视英语大学作文全文共3篇示例,供读者参考篇1The Development of Electric Vehicles Receives Government's AttentionWith the increasing concerns over environmental pollution and energy conservation, the development of electric vehicles (EVs) has received great attention from governments around the world. In recent years, many countries have been actively promoting the adoption of EVs as a more sustainable and environmentally-friendly mode of transportation. In this essay, we will explore how governments play a crucial role in driving the development of EVs through various policies and initiatives.First and foremost, one of the key ways in which governments support the development of EVs is by providing financial incentives to both consumers and manufacturers. These incentives can come in the form of tax credits, rebates, subsidies, or grants, which help to reduce the upfront costs of purchasing an EV and make it more financially attractive for consumers. In addition, governments may also offer incentives to EVmanufacturers to encourage them to invest in research and development, as well as production of EVs. These incentives play a vital role in stimulating demand for EVs and accelerating the growth of the EV market.Furthermore, governments also play a crucial role in building the necessary infrastructure to support the widespread adoption of EVs. This includes establishing a network of EV charging stations, providing funding for research and development of new charging technologies, and implementing regulations to ensure that EV charging infrastructure is readily available to consumers. By investing in EV infrastructure, governments can help to alleviate concerns about range anxiety and make it more convenient for consumers to own and operate EVs.In addition to financial incentives and infrastructure development, governments also implement various regulatory measures to promote the development of EVs. For example, some governments have set targets for the adoption of EVs, implemented emission standards for vehicles, or introduced policies to restrict the sales of traditional internal combustion engine vehicles. These regulatory measures create a favorable environment for EV manufacturers and help to drive thetransition towards cleaner and more sustainable transportation solutions.Moreover, governments also collaborate with industry stakeholders, academia, and research institutions to support innovation and technology development in the EV sector. By fostering partnerships and sharing knowledge and resources, governments can help to accelerate the commercialization of new technologies, improve the efficiency and performance of EVs, and reduce the overall costs of EV manufacturing. This collaborative approach is essential for driving the continuous advancement of EV technology and ensuring that EVs remain competitive in the automotive market.Overall, the development of electric vehicles has become a strategic priority for governments around the world as they seek to address the challenges of climate change, air pollution, and energy security. By providing financial incentives, building infrastructure, implementing regulations, and supporting innovation, governments can play a pivotal role in driving the growth of the EV market and accelerating the transition towards a more sustainable transportation system. With government support, the future of electric vehicles looks promising, and it isonly a matter of time before EVs become the mainstream choice for consumers worldwide.篇2The Development of Electric Vehicles Receives Government AttentionIn recent years, the development of electric vehicles (EVs) has gained significant attention from governments around the world. With the increasing awareness of climate change and the need to reduce greenhouse gas emissions, many countries have set ambitious goals to transition to cleaner and more sustainable modes of transportation. As a result, the development of EVs has become a priority for many governments, who are providing support and incentives to encourage their adoption.One of the main reasons why governments are focusing on the development of EVs is their potential to reduce air pollution and improve public health. Traditional internal combustion engine vehicles emit a variety of pollutants that can have harmful effects on human health, such as particulate matter, nitrogen oxides, and volatile organic compounds. By switching to electric vehicles, which produce zero tailpipe emissions, governmentscan significantly reduce air pollution and improve air quality in urban areas.In addition to the environmental benefits, the development of EVs also presents economic opportunities for countries that are looking to transition to a low-carbon economy. The shift from fossil fuel-powered vehicles to EVs has the potential to create new industries and jobs in sectors such as manufacturing, infrastructure development, and renewable energy. By investing in the development of EVs, governments can stimulate economic growth and position themselves as leaders in the global clean energy transition.To support the growth of the EV market, many governments have implemented policies and programs aimed at incentivizing consumers to purchase electric vehicles. These incentives can take the form of financial incentives, such as tax credits or rebates, as well as non-financial incentives, such as access to carpool lanes or free parking. By making EVs more affordable and convenient for consumers, governments can help accelerate the transition to a cleaner transportation system.Furthermore, governments are also investing in infrastructure to support the widespread adoption of EVs. This includes the installation of public charging stations,improvement of electric grid capacity, and promotion of smart charging solutions. By building a robust EV charging infrastructure, governments can address one of the main barriers to EV adoption and help alleviate range anxiety among consumers.Despite the progress that has been made in the development of EVs, there are still challenges that need to be overcome. One of the main challenges is the high cost of EVs compared to traditional gasoline-powered vehicles. While the cost of EVs has been decreasing in recent years, they are still more expensive than their gas-powered counterparts, which can deter some consumers from making the switch. Governments can help address this challenge by providing financial incentives and subsidies to reduce the upfront cost of EVs and make them more accessible to a wider range of consumers.In conclusion, the development of electric vehicles has become a key priority for governments around the world, as they seek to reduce air pollution, create economic opportunities, and accelerate the transition to a low-carbon economy. By providing support and incentives for the growth of the EV market, governments can help drive innovation, create jobs, and improve public health. With continued investment and commitment,electric vehicles have the potential to play a significant role in shaping the future of transportation and reducing the impact of climate change.篇3Development of electric vehicles has been given high importance by governments around the world. With the increasing concerns about climate change and air pollution, many countries are now focusing on promoting the use of electric vehicles as a more environmentally friendly alternative to traditional gasoline-powered cars. In this essay, we will discuss why the development of electric vehicles is being given so much attention by governments.One of the main reasons why governments are emphasizing the development of electric vehicles is to reduce greenhouse gas emissions and combat climate change. Transportation is one of the largest sources of greenhouse gas emissions globally, with the majority coming from vehicles running on fossil fuels. By promoting the use of electric vehicles, governments aim to decrease the carbon footprint of the transportation sector and contribute to the global efforts to lower emissions and limit global warming.Another important reason for the increased focus on electric vehicles is to improve air quality in urban areas. The combustion of gasoline and diesel in traditional vehicles releases harmful pollutants into the atmosphere, such as nitrogen oxides and particulate matter, which can have adverse effects on human health. By encouraging the adoption of electric vehicles, governments hope to reduce air pollution levels and create healthier and more livable cities for their citizens.Furthermore, governments also see the development of electric vehicles as a way to reduce dependence on imported oil and enhance energy security. As the supply of oil is finite and subject to geopolitical uncertainties, shifting towards electric vehicles powered by renewable energy sources can help countries reduce their reliance on imported oil and ensure a more stable and sustainable energy future.In addition to the environmental and energy security benefits, the development of electric vehicles also presents economic opportunities for countries. The electric vehicle industry is rapidly growing and has the potential to create new jobs and stimulate economic growth. By investing in research and development, manufacturing, and infrastructure for electric vehicles, governments can support the growth of a new cleantechnology sector and position their countries as leaders in the global market for electric vehicles.Governments are also using a variety of incentives and regulations to promote the adoption of electric vehicles. These may include tax incentives for purchasing electric vehicles, subsidies for charging infrastructure, exemptions from road tolls and parking fees, and stricter emissions standards for traditional vehicles. By creating a favorable policy environment for electric vehicles, governments can accelerate their adoption and help overcome barriers such as high initial costs and limited charging infrastructure.In conclusion, the development of electric vehicles is receiving significant attention from governments due to its potential to address climate change, improve air quality, enhance energy security, create economic opportunities, and drive technological innovation. By supporting the transition to electric vehicles through policy measures and investments, governments can contribute to a more sustainable and prosperous future for their countries and the world. It is clear that electric vehicles have a crucial role to play in the transition to a cleaner and more sustainable transportation system, and governments are right to prioritize their development.。
As a high school student, Ive always been fascinated by the rapid advancements in technology and their impact on our daily lives. One of the most exciting changes Ive witnessed is the rise of new energy sources and their transformative effects on our world.Growing up, I remember the reliance on traditional energy sources like coal and oil. These were not only limited in supply but also had significant environmental impacts. However, in recent years, the emergence of new energy has revolutionized the way we power our lives. Solar panels, wind turbines, and electric vehicles are becoming increasingly common, and theyre changing the landscape of energy consumption.The most striking change Ive noticed is in the environmental sphere. The air quality in my hometown has improved significantly since the adoption of new energy sources. The reduction in emissions from fossil fuels has led to clearer skies and healthier living conditions for everyone. Ive also seen the positive impact on wildlife and ecosystems, as the reduction in pollution has allowed for a more balanced and thriving natural environment.Economically, the shift to new energy has opened up new job opportunities and industries. Many of my peers are now considering careers in renewable energy, from engineering to research and development. This has also led to increased investment in green technologies, which has spurred innovation and competition in the market.One of the most significant changes Ive experienced personally is theadoption of electric vehicles. My family recently switched to an electric car, and the difference in our daily lives has been remarkable. Not only are we saving on fuel costs, but were also contributing to a reduction in greenhouse gas emissions. The convenience of charging at home and the smooth, quiet ride have made it a preferable choice over traditional combustion engine cars.Moreover, the integration of smart grids and energy storage solutions has made the use of new energy more efficient and reliable. Ive seen how energy can now be stored during periods of low demand and released when needed, ensuring a consistent power supply even when the sun isnt shining or the wind isnt blowing.However, the transition to new energy isnt without its challenges. Theres still a need for further investment in infrastructure and research to make renewable energy more accessible and affordable for everyone. Additionally, public awareness and education about the benefits of new energy are crucial to ensure a smooth transition.In conclusion, the introduction of new energy sources has brought about significant changes in various aspects of our lives. From environmental improvements to economic opportunities and personal convenience, the benefits are undeniable. As a high school student, Im excited to see where this journey will take us and how we can continue to innovate and adapt to create a more sustainable future.。
新能源汽车发展历程未来展望英语作文全文共3篇示例,供读者参考篇1The Development of New Energy Vehicles: A Historical Perspective and Future OutlookIntroductionWith the rise of environmental consciousness and the depletion of fossil fuel resources, the development of new energy vehicles has become a crucial aspect of the automotive industry. In this essay, we will explore the historical development of new energy vehicles and provide insights into their future prospects.Historical DevelopmentThe idea of new energy vehicles dates back to the early 19th century, with the invention of the first electric car by Thomas Davenport in 1834. However, it was not until the late 20th century that new energy vehicles began to gain mainstream attention. In the 1990s, major automotive manufacturers started to invest in research and development of electric and hybridvehicles, driven by concerns over greenhouse gas emissions and global warming.The first mass-produced electric car, the Nissan Leaf, was introduced in 2010, marking a significant milestone in the development of new energy vehicles. Since then, electric and hybrid vehicles have become increasingly popular, with more and more manufacturers offering a wide range of options to consumers. The rapid growth of the new energy vehicle market has been facilitated by advancements in battery technology, charging infrastructure, and government incentives.Future ProspectsLooking ahead, the future of new energy vehicles appears bright. With ongoing efforts to reduce carbon emissions and combat climate change, governments around the world are implementing policies to promote the adoption of electric and hybrid vehicles. This includes subsidies, tax incentives, and stricter emission standards that encourage manufacturers to produce more sustainable vehicles.In addition, technological advancements in battery technology are making electric vehicles more affordable and efficient. The development of solid-state batteries, for example, promises to revolutionize the new energy vehicle market byincreasing energy density, reducing charging times, and improving overall performance. As a result, electric vehicles are becoming increasingly competitive with traditional internal combustion engine vehicles in terms of cost and range.Furthermore, the expansion of charging infrastructure is making it easier for consumers to transition to electric vehicles. With the proliferation of fast chargers and the development of innovative charging solutions, range anxiety is becoming less of a concern for drivers. As more charging stations are built, electric vehicles are becoming a more practical and convenient option for everyday use.ConclusionIn conclusion, the development of new energy vehicles has come a long way since the early days of the electric car. With advancements in technology, government support, and changing consumer preferences, electric and hybrid vehicles are poised to play a key role in the future of transportation. By continuing to invest in research and development, expand charging infrastructure, and implement supportive policies, we can accelerate the transition to a more sustainable automotive industry.篇2The Development History and Future Prospects of New Energy VehiclesIntroductionWith the increasing global awareness of climate change and environmental pollution, the development of new energy vehicles has become a significant trend in the automotive industry. New energy vehicles, including electric vehicles, plug-in hybrid vehicles, and fuel cell vehicles, are seen as a promising solution to reduce greenhouse gas emissions and dependence on fossil fuels. This essay will discuss the development history of new energy vehicles and provide insights into their future prospects.Development HistoryThe idea of using alternative energy sources to power vehicles dates back to the early 19th century when electric vehicles were first introduced. However, the mass production and commercialization of new energy vehicles only began in the late 20th century. The initial models faced challenges such as limited driving range, high costs, and lack of charging infrastructure, which hindered their widespread adoption.In recent years, technological advancements, government subsidies, and environmental regulations have spurred the growth of the new energy vehicle market. Major automakers around the world have invested heavily in research and development to improve battery technology, increase driving range, and reduce production costs. As a result, electric vehicles have become more affordable and accessible to consumers.Future ProspectsLooking ahead, the future of new energy vehicles appears promising. Several trends are driving the rapid growth of this market:1. Government Support: Many countries have established policies and incentives to promote the adoption of new energy vehicles, including tax credits, rebates, and subsidies. These measures encourage consumers to switch from traditional gasoline-powered vehicles to electric or hybrid models.2. Technological Innovation: Advances in battery technology, such as the development of solid-state batteries andfast-charging solutions, are addressing the key challenges of driving range and charging time. As a result, electric vehicles are becoming more practical for everyday use.3. Environmental Concerns: The growing awareness of climate change and air pollution is motivating consumers to choose cleaner and greener transportation options. New energy vehicles offer a sustainable alternative to fossil fuel-powered vehicles and contribute to reducing carbon emissions.4. Infrastructure Investment: Governments and private companies are investing in the expansion of charging stations and hydrogen refueling stations to support the growing fleet of new energy vehicles. This infrastructure development is essential for overcoming range anxiety and encouraging more drivers to embrace electric and fuel cell vehicles.ConclusionIn conclusion, the development of new energy vehicles has made significant progress in recent years, thanks to technological innovation, government support, and environmental concerns. The future prospects of new energy vehicles are promising, with growing demand from consumers and continued investment in research and development. As the automotive industry shifts towards electrification and sustainability, new energy vehicles are poised to play a crucial role in shaping the future of transportation.篇3The Development History and Future Prospects of New Energy VehiclesWith the increasing awareness of environmental protection and the promotion of sustainable development, new energy vehicles have attracted more and more attention in recent years. New energy vehicles refer to vehicles that use advanced technologies and alternative energy sources to reduce carbon emissions and dependence on fossil fuels. The development of new energy vehicles has undergone a long and winding road, but the future prospects are promising.The development of new energy vehicles can be traced back to the 19th century when electric vehicles and hybrid vehicles were already in existence. However, it was not until the late 20th century that new energy vehicles gained momentum with the advancement of battery technology and the need for reducing greenhouse gas emissions. The early 2000s saw the introduction of the first mass-produced electric vehicles, such as the Toyota Prius and Nissan Leaf, which marked a significant milestone in the development of new energy vehicles.In recent years, governments around the world have been promoting the adoption of new energy vehicles through incentives, subsidies, and stricter regulations on emissions. China, for example, has become the largest market for new energy vehicles, with the government setting ambitious targets for the number of electric vehicles on the road. Other countries, such as Norway and the Netherlands, have also been successful in promoting the uptake of electric vehicles through tax breaks and infrastructure investments.The future prospects of new energy vehicles are bright, as advancements in technology continue to drive down costs and improve performance. Battery technology, in particular, has seen significant improvements in recent years, with longer driving ranges and faster charging times. The development ofsolid-state batteries and other new technologies promises to further enhance the capabilities of electric vehicles and make them more competitive with traditional vehicles.In addition to technological advancements, the growing demand for electric vehicles and the increasing awareness of environmental issues are also driving the growth of new energy vehicles. Consumers are becoming more conscious of the environmental impact of their transportation choices and areincreasingly choosing electric vehicles as a greener alternative. As a result, the market for new energy vehicles is expected to continue to expand in the coming years.Despite the promising future prospects, there are still challenges to be overcome in the development of new energy vehicles. Range anxiety, high costs, and the lack of charging infrastructure are some of the key obstacles that need to be addressed in order to accelerate the adoption of electric vehicles. Governments, industry stakeholders, and consumers will need to work together to overcome these challenges and ensure the success of new energy vehicles.In conclusion, the development history of new energy vehicles has been marked by significant advancements in technology and growing awareness of environmental issues. The future prospects of new energy vehicles are promising, with advancements in technology and growing demand driving the growth of the market. By overcoming the challenges and barriers to adoption, new energy vehicles have the potential to revolutionize the transportation industry and contribute to a more sustainable future.。
电动汽车未来趋势英语作文The Future Trends of Electric Vehicles。
In recent years, electric vehicles have been gaining popularity around the world as more and more people are becoming aware of the environmental benefits of using them. With advancements in technology and increasing concerns about climate change, the future of electric vehicles looks promising. In this essay, we will discuss the future trends of electric vehicles.One of the major trends in the future of electric vehicles is the development of more efficient batteries. Currently, one of the main drawbacks of electric vehiclesis the limited range they can travel on a single charge. However, with ongoing research and development in battery technology, we can expect to see batteries that are smaller, lighter, and have a longer range. This will make electric vehicles more practical for everyday use and help to reduce range anxiety among consumers.Another trend in the future of electric vehicles is the expansion of charging infrastructure. As more people switch to electric vehicles, there will be a growing need for more charging stations to accommodate them. Governments and private companies are already investing in building more charging infrastructure to support the growing number of electric vehicles on the road. This will make it more convenient for people to charge their vehicles and encourage more people to make the switch to electric.In addition to advancements in battery technology and charging infrastructure, we can also expect to see more affordable electric vehicles in the future. As demand for electric vehicles increases, economies of scale will drive down the cost of production, making electric vehicles more accessible to a wider range of consumers. This will help to accelerate the adoption of electric vehicles and reduce our dependence on fossil fuels.Furthermore, the future of electric vehicles will also be shaped by advancements in autonomous driving technology.Electric vehicles are already well-suited for autonomous driving due to their reliance on software and sensors. As autonomous driving technology continues to improve, we can expect to see electric vehicles that are not only environmentally friendly but also safer and more efficient on the road.Overall, the future of electric vehicles looks bright as advancements in technology and growing concerns about climate change drive the transition to cleaner transportation options. With more efficient batteries, expanded charging infrastructure, affordable pricing, and autonomous driving technology, electric vehicles are poised to revolutionize the way we travel. As consumers become more conscious of their environmental impact, electric vehicles will play a crucial role in reducing emissions and creating a more sustainable future.。
光电子学_南京邮电大学中国大学mooc课后章节答案期末考试题库2023年1.Photogeneration occurs in the neutral region. The electron has to diffuse tothe depletion layer and then roll down the energy hill i.e. drift across the SCL.参考答案:正确2.Photogeneration inside the LED generates an electron and a hole.参考答案:错误3.The fifth valence electron can be readily freed by thermal vibrations of the Silattice.参考答案:正确4.The area under pE(E) versus E is not the hole concentration.参考答案:错误5.vdh = Drift velocity of the holes参考答案:正确6.Wavelengths greater than roughly lg are not absorbed (by band-to bandtransitions).参考答案:正确7.When it moves a distance dx, work must be done by the external circuit. Intime dt, the electron drifts a distance dx and does an amount of work eEdx 参考答案:正确8.The electron is notacted on by the forceeEof the electric field.参考答案:错误9.The cavity in Vertical Cavity Surface Emitting Lasers is not vertical.参考答案:错误10.External photocurrent due to the motion of this photogenerated electron isie(t).参考答案:正确11.If EF is close to the conduction band (CB) edge, Ec, it results in an n-type, andif it is close to the valence band (VB) edge, Ev, it results in a p-typesemiconductor.参考答案:正确12.An electron and hole pair (EHP) is photogenerated at x = y. The electron andthe hole drift in opposite directions with drift velocities vh and ve参考答案:错误13.An open circuit pn junction under illumination generates an open circuitvoltage Voc.参考答案:正确14.The pn junction in open circuit. The photogenerated electron and hole rolldown their energy hills (drift) but there is a voltage Voc across the diode that causes them diffuse back so that the net current is zero.参考答案:正确15.Light from an optical fiber is coupled into the active region of the laserstructure. As the radiation propagates through the active layer, opticallyguided by this layer, it becomes amplified by the induced stimulatedemissions, and leaves the optical cavity with a higher intensity.参考答案:正确16.Traveling wave (TW) semiconductor optical amplifier: The ends of theoptical cavity have antireflection (AR) coatings so that the optical cavity does not act as an efficient optical resonator, a condition for laser-oscillations.参考答案:正确17.The cross section of Vertical Cavity Surface Emitting Lasers is circular.参考答案:正确18.The mode field diameter is normally larger than the active layer thicknessand the radiation spreads into the guiding layer.参考答案:正确19.Partially reflected waves at the corrugations can only constitute a reflectedwave when the wavelength satisfies the Bragg condition.参考答案:正确20.Rate of electron injection by current I = Rate of spontaneous emissions - Rateof stimulated emissions参考答案:错误21.When the laser is in a steady state, Rate of coherent photon loss in thecavity= Rate of stimulated emissions参考答案:正确22.Power Conversion Efficiency=Optical output power / Electric input power参考答案:正确23.Extraction efficiency = (Total loss)/(Loss from the exit cavity end)参考答案:错误24.The width of the CB is called the electron affinity χ.参考答案:正确25.The interactions between the Si atoms and their valence electrons result inthe electron energy in the crystal falling into two distinct energy bands called the valence band (VB) and conductions band (CB).参考答案:正确26.At sufficiently high diode currents corresponding to high optical power, theoperation becomes single mode.参考答案:正确27.In LED, most of the light is in the active region.错误28.In multiple quantum well (MQW) heterostructure laser diode, electrons areinjected by the forward current into quantum wells.参考答案:正确29.The density of sates g(E) is a step-like function, and is finite at E1 and E1¢.参考答案:正确30. A buried heterostructure laser diode for telecom applications: The activelayer (InGaAsP) is surrounded by the wider bandgap, lower refractive index InP material. Layers are grown on an InP substrate.参考答案:正确31. A double heterostructure semiconductor laser device has its active regionburied within the device in such a way that it is surrounded by low refractive index materials rendering the active region as a waveguide.参考答案:正确32.Robert Hall and his colleagues, while working at General Electric's Researchand Development Center in New York, were among the first groups ofresearchers to report a working semiconductor laser diode in 1962.正确33.In semiconductor laser diode, band diagram does not need a sufficiently largeforward bias to cause population inversion and hence stimulated emission.参考答案:错误34. A random photon (from spontaneous decay) of energy hu21 = E2 - E1 can notinitiate stimulated emission.参考答案:错误35.As the states at E2 are long-lived, they quickly become populated and there isa population inversion between E2 and E1.参考答案:正确36.Ions at E3 rapidly decay to the long-lived state at the energy level E2 byemitting lattice vibrations (phonons).参考答案:正确37.Many phosphors are based on activators doped into a host matrix.参考答案:正确38.Light could not be coupled from a surface emitting LED into a multimodefiber using an index matching epoxy.参考答案:错误39.Impact of an energetic conduction electron with crystal vibrations transfersthe electron's kinetic energy to a valence electron and thereby excites it to the conduction band.参考答案:正确40.An RCLED is an LED with an optical resonant cavity (RC) formed by twoDBRs has a narrower emission spectrum.参考答案:正确41.Recombination around the junction and within the diffusion length of theelectrons in the p-side leads to spontaneous photon emission.参考答案:正确42.The most useless property of EF is in terms of a change in EF.参考答案:错误43.Eg=Ev-Ec参考答案:错误44.The electrons at a particular energy level also have kinetic energies in the yzplane, which is not quantized.参考答案:正确45.Potential energy is charge* potential = q V参考答案:正确46.An electron in the n-side at Ec must overcome a potential energy (PE) barrierto go over to Ec in the p-side. This PE barrier is eVo where Vo is the built-in potential, i.e., the maximum extent Ec has been bent to line up the Fermilevels.参考答案:正确47.The EHP recombination that occurs in the SCL and the neutral regions in thisGaAs pn junction case would result in photon emission, with a photon energy that is approximately Eg. This direct recombination of injected minoritycarriers and the resulting emission of photons represent the principle ofoperation of the Light Emitting Diode (LED).参考答案:正确48.The increase dV results in an increase dI in the diode current. The dynamic orincremental resistance is rd = dV/dI.参考答案:正确49.In a Ge pn junction, above 238 K, Irev is controlled by ni2 and below 238 K itis controlled by ni.参考答案:正确50.Ec = Fermi energy,EF =Conduction band edge参考答案:错误51.n a degenerate semiconductor, one cannot assume that n=Nd or p=Na, as thedopant concentration is so large that they interact with each other. Not alldopants are able to become ionized. The saturation is typically around 1020 cm-3.参考答案:正确52.Na <参考答案:错误53.At room temperature the thermal vibrations of the lattice can free the holeaway from the B- site.参考答案:正确54.There are acceptor energy levels just above Ev around B- sites. Theseacceptor levels accept electrons from the VB and therefore create holes in the VB.参考答案:正确55.The conductivity of a semiconductor depends on both electrons and holes asboth contribute to charge transport.参考答案:正确56.mh =Drift velocity of the holes参考答案:错误57.The product g(E)f(E) is the number of electrons per unit energy per unitvolume or electron concentration per unit energy.参考答案:正确58.The photogenerated electron has to diffuse to the depletion region where it isswept into the i-layer and drifted across.参考答案:正确59.Nd <参考答案:错误60. A reverse biased pin photodiode is not illuminated with a short wavelengthlight pulse that is absorbed very near the surface.参考答案:错误61.Impact ionization processes releasing EHPs and the resulting avalanchemultiplication.参考答案:正确62. d = L/a = penetration or absorption depth参考答案:错误。
Research and development of electric vehicles forclean transportationAbetractThis article presents the research and development of all electric vehicle (EV)in Department of Human·Robotics Saitama Institute of Technology,Japan.Electric mobile systems developed in our laboratory include aconverted electric automobile,electric wheelchair and personal mobile robot.These mobile systems contribute to realize clean transportation since energy sources and devices from all vehicles,i.e.,batteries and electric motors,does not deteriorate the environment.To drive motors for vehicle traveling,robotic technologies were applied.Key words:electric vehicle;robot technology;converted electric vehicle;clean transportationIntroductionThe influences of internal combusti on sy’stems such as cars with gas engines become a serious social problem because of the environment pollution.To alleviate the problems automobile manufacturers forced to shift their part of productions from pure internal combustion systems to hybrid systems or electric systems.An electric system provides the best solution to the problem,however'weight and energy capacity ofelectric batteries ale still notenough for the substitution of the internal combustion system witIl gasoline.Therefore,a hybrid system might be a reasonable solution for the substitute of pure internal combustion syrstem so far.Toyota Motor Corp.provided their first hybrid car“P刚US”(Toyota Motor Corporation,1997),and the hybdd technology has been extended to large class of cars.such as‘'Estima hybrid'’and“Hartier hybrid”.n is estimated that electric systems will be widely used in the near future.To get initiative in this direction ofdevelopment,Mitsubishi Motors developed a pure electric vehicle.“i—MiEV”and Fuji Heavy Industry also develo ped‘‘Rl e”.both of which will be commercially available soon.Electric drive systems ale relatively simple compared with an engine.It needs no cooling system,lubricant system.timing control between electric and gas responses.In our electric vehicle(EV)project,the first stage of the research has been started in which we study the fundamen—tal capabilities of Ev.For the objective.we developed a converted EV(eleclric mini.E-MINI)in our laboratary.In this article,the procedure ofconversion and results ofbasicteSts including road tests am reported.1 Electric vehicle development1.1 Developments of electric vehicle in laboratory or as personal project Good features of EVs ale clean and easy to handie not only in driving but also in the development in university laboratory or as personal project.To develop a gas engine,a large space witIl expensive facilities is needed for testing engine.such as an isolated room with a noise reduction system,all air ventilations,a safety system for eliminating the damages of engine explosion,ete.Unlike the development of engine.a drive system winl an electric motor is quite simple and easy to handle.No special facility for noise reduction is needed,because electric motor is very quiet compared with engine.No air ventilation system is needed since electric system does not contaminate the environments,and smeHy or volatile chemistry such as gasoline is not used.1.2 BasecarAs a base car for converted EV,a class of light—car(1ess than 660 cc of gas engine)or a small 一car around 1000-1 300 cc might be suitable.Since the light—car shows a better performance in traveling range and acceleration.After the conversion,it would gain 100 kg and sometimes additional weight could reach 300 kg.W色chose a Rover Mini(known as a Mini Cooper)as a base car to develope the converted EV because of its relatively small size,rigid monocoque chassis construc—tion,and easily obtainable of parts.The car has been sold for about 40 years without major design change.Additionally,its electric systems are quite simple which has no computers,nor brake—servo system.Figure 1 shows a snap shot of a base car before conversion to EV,11他base car used was manufactured in 1986 and its speeifications ale shown in亿Iblc 1.1.3 MotortypeSome types of motors which can be used for electric vehicle propulsions are now cormnercially available such as direct current(DC)brash motors,DC brash—less motors,induction motors.etc.However,if a base cal"with a back gear was chosen.a DC brash motor is a solution with the highest pri嘶ty when consider the cost,weight,and performances.Currently,digital control technology is applied to drive a such high power motor in which power switching devices such as FETs.IGBTs are used.The full voltage power line is switched on and ofr in high frequency higher than 10 kI-Iz by the switching devices and the pulse shaped voltage is applied to motor windings.The switching frequency is constant while a ratio between on.time and off-time in one cycle is varied based on the operation valRe.This drive method is called as a pulse width modulation(PWM).For rotate a DC brash motor in specific direction.Itneeds iust one switching device which chops a power line connected to a motor.However,if rotating a motor to drive in multiple directions is needed,namely clockwise(C、聊and counterclockwise(CCW),four switching devices are needed to be installed.Compared to DC brash motor,a DC brash—legs motor or an alternate current(AC)motor need at least six switching devices which have to be controlled independently.AIso,a sensor for detecting rotor angle is essential and Call make a motor and a driver to be complicated,heavy and bulky.From the discussion.it is clarified that a DC brash motor rotating only in one direction is the simplest configuration compared with others.Tt圯configuration can be available by installing or remaining a back gear on the vehicle.Tllis is not a difficult requirement because a normal gas engine Call rotate in ofle direction as well.It could be an another solution to alter the connection between batteries and a motor using circuit contactors to provide a current flow in negative direction.In this case.the moving direction,forward or back,is controlled by an electric switch,unlike a usual automobile which moving direction is controlled by a mechanical gear transmission.However,this is a unique solution only applicable for EVs.1.4 Battery typeWb have to consider the type of drive baaeries for propelling EV A Li—ion battery may present the best performance among the existing batteries in its energy/weight ratio.However,the strict current control in charging and discharging situations is required and a special ordered baUery chargot has to be used in many cases.If the baRery configuration has been fixed.it would be di伍cult to change it for a new specification。