第一章 最优化问题总论
无论做任何一件事,人们总希望以最少的代价取得最大的效益,也就是力求最好,这就是优化问题.最优化就是在一切可能的方案中选择一个最好的方案以达到最优目标的学科.例如,从甲地到乙地有公路、水路、铁路、航空四种走法,如果我们追求的目标是省钱,那么只要比较一下这四种走法的票价,从中选择最便宜的那一种走法就达到目标.这是最简单的最优化问题,实际优化问题一般都比较复杂.
概括地说,凡是追求最优目标的数学问题都属于最优化问题.作为最优化问题,一般要有三个要素:第一是目标;第二是方案;第三是限制条件.而且目标应是方案的“函数”.如果方案与时间无关,则该问题属于静态最优化问题;否则称为动态最优化问题.
§1.1 最优化问题数学模型
最简单的最优化问题实际上在高等数学中已遇到,这就是所谓函数极值,我们习惯上又称之为经典极值问题.
例1.1 对边长为a 的正方形铁板,在四个角处剪去相等的正方形以制成方形无盖水槽,问如何剪法使水槽的容积最大?
解 设剪去的正方形边长为x ,由题意易知,与此相应的水槽容积为
x x a x f 2)2()(-=.
令
0)6)(2()2()2)(2(2)('2=--=-+--=x a x a x a x x a x f ,
得两个驻点:
a x a x 61
21==
,.
第一个驻点不合实际,这是因为剪去4个边长为2a
的正方形相当于将铁板全部剪去.现
在来判断第二个驻点是否为极大点.
∵ a x f 824)(''-=, 0
4)6(''<-=a a
f ,
∴
6a x =
是极大点. 因此,每个角剪去边长为6a
的正方形可使所制成的水槽容积最大.
例1.2 求侧面积为常数
)0(62>a a ,体积最大的长方体体积. 解 设长方体的长、宽、高分别为z y x ,,
体积为v ,则依题意知体积为 xyz z y x f v ==)(,,,
条件为
06)(2)(2=-++=a xy xz yz z y x ,,?.
由拉格朗日乘数法,考虑函数
)6222()(2a xy xz yz xyz z y x F -+++=λ,,,
2()02()02()0x y z F yz y z F xz z x F xy x y λλλ'=++='=++='=++=,,
,
由题意可知z y x ,,
应是正数,由此0≠λ,将上面三个等式分别乘以z y x ,,并利用条件23a xy zx yz =++,得到
22
22(3)02(3)02(3)0xyz a yz xyz a zx xyz a xy λλλ?+-=?+-=??+-=?,
,.
比较以上三式可得
xy a zx a yz a -=-=-222333,
从而a z y x ===.又侧面积固定的长方体的最大体积客观存在,因此侧面积固定的长方体中以正方体体积最大,其最大值为3
a .
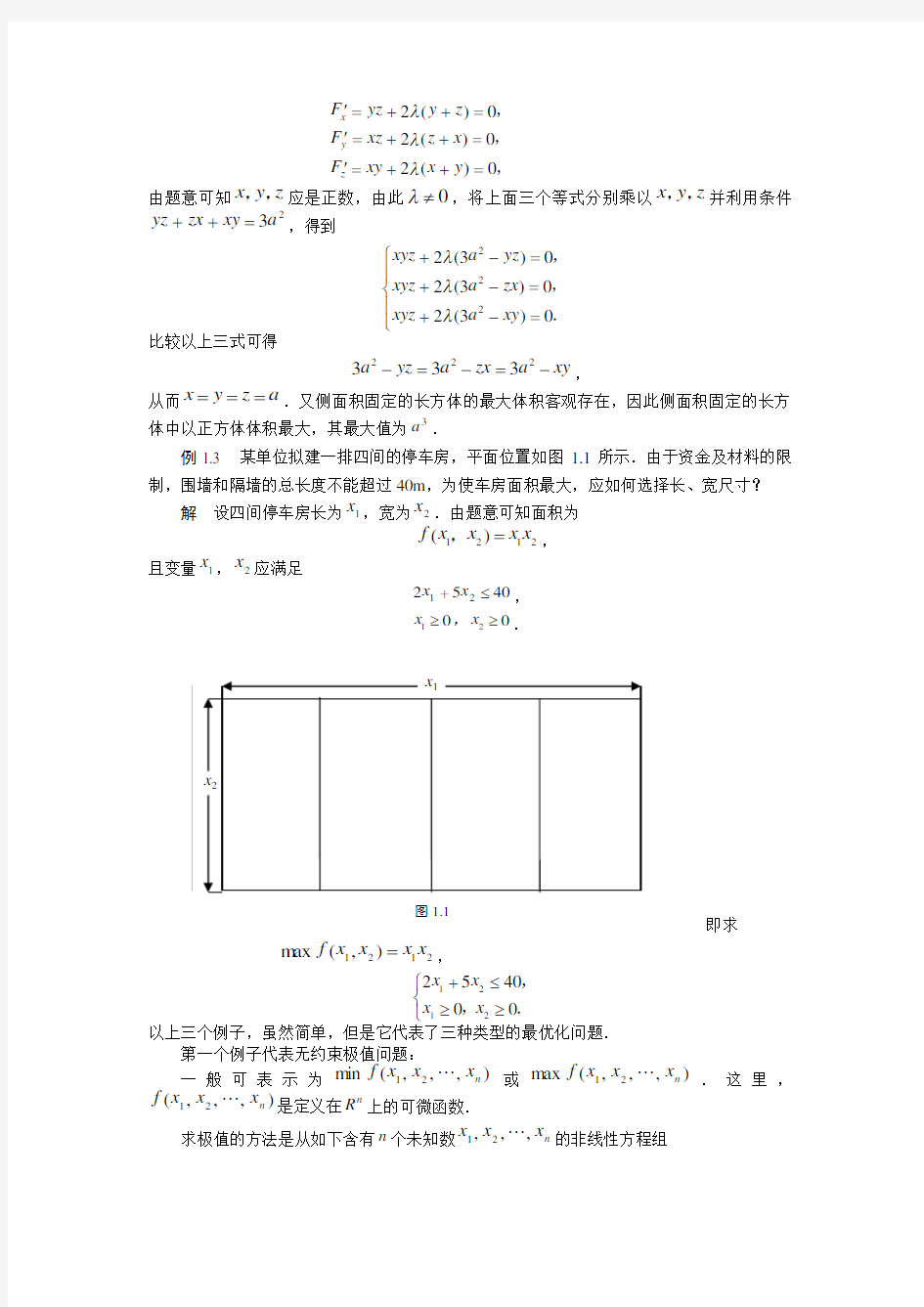
例1.3 某单位拟建一排四间的停车房,平面位置如图1.1所示.由于资金及材料的限制,围墙和隔墙的总长度不能超过40m ,为使车房面积最大,应如何选择长、宽尺寸?
解 设四间停车房长为1x ,宽为2x .由题意可知面积为
2121)(x x x x f =,,
且变量1x ,2x 应满足
405221≤+x x , 1200x x ≥≥,.
即求
2121),(m ax x x x x f =,
1212254000x x x x +≤??
≥≥?,,.
以上三个例子,虽然简单,但是它代表了三种类型的最优化问题.
第一个例子代表无约束极值问题:
一般可表示为),,,(m in 21n x x x f Λ或),,,(m ax 21n x x x f Λ.这里,
),,,(21n x x x f Λ是定义在n R 上的可微函数.
求极值的方法是从如下含有n 个未知数n x x x ,,,21Λ的非线性方程组
??
???
?
?===0
)('0)('0)('2
1212121n x n x n x x x x f x x x f x x x f n ΛΛΛΛΛΛΛ,,,,,
中解出驻点,然后判定或验证这些驻点是不是极值点.
第二个例子代表具有等式约束的极值问题: 一般可表示为
121212min ()max ()()0123()n n j n f x x x f x x x h x x x j m m n ???
==
,,或,,,,,,,,,,,,.
该问题的求解通常采用拉格朗日乘数法,即把这个问题转化为求
121212121
()()()
m
n m n j j n j L x x x f x x x h x x x λλλλ==-∑L L L L ,,,;,,,,,,,,,
的无约束极值问题.
第三个例子代表具有不等式约束的极值问题.
下面具体分析上述三种类型的最优化问题中按经典极值问题解法可能出现不能解决的情况:
(1)当变量个数增加且方程组又是非线性,求解此方程组只有在相当特殊情况下才能人工解出.正因为如此,通常高等数学中的求极值问题的变量个数一般不超过三个.
(2)当限制条件出现不等式,无论变量数多少,按经典极值方法求解根本无法解决. 直到本世纪50年代,最优化理论的建立以及电子计算机的迅速发展,才为求解各种最优化问题提供了雄厚的基础和有效手段.不过最优化方法作为一门崭新的应用学科,有关理论和方法还没有完善,有许多问题还有待解决,目前正处于迅速发展之中.
最优化问题的数学模型包含三个要素:变量(又称设计变量)、目标函数、约束条件. 一、变量
一个优化设计方案是用一组设计参数的最优组合来表示的.这些设计参数可概括地划分为两类:一类是可以根据客观规律、具体条件、已有数据等预先给定的参数,统称为常量;另一类是在优化过程中经过逐步调整,最后达到最优值的独立参数,称为变量.优化问题的目的就是使各变量达到最优组合.变量的个数称为优化问题的维数.例如有n 个变量
n x x x ,,,Λ21的优化问题就是在n 维空间n R 中寻优.n 维空间n R 中的点T n x x x X ][21,,,Λ=就代表优化问题中的一个方案.当变量为连续量时,称为连续变量;
若变量只能在离散量中取值,称为离散变量.
二、目标函数
反映变量间相互关系的数学表达式称为目标函数.其值的大小可以用来评价优化方案的好坏.按照规范化的形式,一般把优化问题归结为求目标函数的极小化问题,换句话说,目标函数值越小,优化方案越好.对于某些追求目标函数极大的问题,可以转化成求其负值最小的问题,即
12max ()max ()min[()]n f X f x x x f X ==--L ,,,.
因此在本书的叙述中,一律把优化问题描述为目标函数的极小化问题,其一般形式为
12min ()min ()n f X f x x x =L ,,,. 如果优化问题只有一个目标函数,称为单目标函数,如果优化问题同时追求多个目标,则该问题的目标函数称为多目标函数.
多目标优化问题的目标函数通常表示为
12min ()[()()()]T m V F X f X f X f X -=L ,,,,
其中T
n x x x X ][21,,,Λ=.这时的目标函数在目标空间中是一个m 维矢量,所以又称之为
矢量优化问题(一般用min 加一个前缀“-V ”来表示矢量极小化). 三、约束条件
变量间本身应该遵循的限制条件的数学表达式称为约束条件或约束函数. 约束条件按其表达式可分为不等式约束和等式约束两种,即
()012..()012i j g X i l s t h X j m ≥=???
==??L L ,,,
,,,,,,.
上式中“s . t .”为Subject to 的缩写,意即“满足于”或“受限于”.按约束条件的作用还可将约束条件划分为起作用的约束(紧约束、有效约束)和不起作用的约束(松约束、消极约束).等式约束相当于空间里一条曲线(曲面或超曲面),点X 必须为该曲线(曲面或超曲面)上的一点,因而总是紧约束.有一个独立的等式约束,就可用代入法消去一个变量,使优化问题降低一维.因此,数学模型中独立的等式约束个数应小于变量个数;如果相等,就不是一个待定优化系统,而是一个没有优化余地的既定系统.不等式约束通常是以其边界
)0)((0)(≈=X g X g 或表现出约束作用的,它只限制点X 必须落在允许的区域内(包括边
界上),因而不等式约束的个数与变量个数无关.不带约束条件的优化问题称为无约束最优化问题;带约束条件的优化问题称为约束最优化问题.
四、带约束条件的优化问题数学模型表示形式
综上所述,全书所要讨论的问题是如下的(静态)最优化问题,其表示形式有三种: 第一种最优化问题表示形式为
1212[]1212min
()()012..()012()T n n x x x i n j n f x x x g x x x i l s t h x x x j m m n ∈Ω
≥=???
==
,,,,,,,,,,,,,,,. 第二种最优化问题表示形式为
min ()()012..()012()X i j f X g X i l s t h X j m m n ∈Ω
≥=???
==
,,,
,,,,,,.
第三种最优化问题表示形式为
min ()()0..()0X f G X s t H X ∈Ω
≥??
=?,
,
,X
(1.1)
其中11()[()()]()[()()]T T
l m G X g X g X H X h X h X ==L L ,
,,,,. 上述三种表示形式中,X ∈Ω称为集约束.在所讨论的最优化问题中,集约束是无关紧要的.这是因为一般n
R ≡Ω,不然的话,Ω通常也可用不等式约束表达出来.因此今后一般不再考虑集约束.
满足所有约束的点X 称为容许点或可行点.容许点的集合称为容许集或可行域.可用 {|()012()012()}i j D X g X i l h X j m m n =≥=== 一般地,对于最优化问题(1.1)的求解,是指在可行域内找一点* X ,使得目标函数) (X f 在该点取得极小值,即 *** ()min ()()0..()0f X f X G X s t H X =≥??=?, ,. 这样的*X 称为问题(1.1)的最优点,也称极小点,而相应的目标函数值 )(*X f 称为最优值;合起来, ))((* *X f X ,称为最优解,但习惯上常把*X 本身称为最优解.最优点的各分量和最优值必须是有限数. §1.2 最优化问题的算法 一、二维最优化问题的图解法 二维最优化问题具有鲜明的几何解释,这对于理解有关理论和掌握所述的方法是很有益处的.下面讨论的二维最优化问题为 ?? ?==≥.0)(210)(. .)(min 212121x x h l i x x g t s x x f i ,,,,, ,,Λ (一)约束集合 当约束函数为线性时,等式约束在21x x , 的坐标平面上为一条直线;不等式约束在21x x ,的坐标平面上为一半平面.当约束函数(例如)(21x x h ,)为非线性时,则等式约束条 件0)(21=x x h ,在21x x ,的坐标平面上为一条曲线(如图 1.2所示).当约束函数(例如 )(211x x g ,)为非线性时,则不等式约束0)(211≥x x g ,在21x x ,的坐标平面上为曲线0)(211=x x g ,把坐标平面分成两部分当中的一部分(如图1.3所示). 图1.2 图1.3 综上所述,当把约束条件中的每一个等式所确定的曲线,以及每一个不等式所确定的部 分在21x x , 坐标平面上画出之后,它们相交的公共部分即为约束集合D . 例1.4 在21x x , 坐标平面上画出约束集合 }001|],{[212 22121≥≥≤+=x x x x x x D T ,,. 解 满足 12 221≤+x x 的区域为以原点为圆心,半径为1的圆盘;满足0021≥≥x x ,的区域为第一象限中的扇形(如图1.4所示). (二)等高线 我们知道 )(21x x f t ,= 在三维空间中表示一张曲面.c t =(其中c 为常数)在三维空间中表示平行于21x x , 平面的一个平面,这个平面上任何一点的高度都等于常数c (如图1.5所示). 图1.4 图1.5 现在,在三维空间中曲面)(21x x f t , =与平面c t =有一条交线L .交线L 在21x x ,平面上的投影曲线是L ',可见曲线L '上的点T x x ][21,到平面c t =的高度都等于常数c ,也即曲 线L '上的T x x ][21,的函数值)(21x x f ,都具有相同的值c .当常数c 取不同的值时,重复上面 的讨论,在21x x , 平面上得到一簇曲线——等高线.不难看出,等高线的形状完全由曲面)(21x x f t ,=的形状所决定;反之,由等高线的形状也可以推测出曲面)(21x x f t ,=的形 状.在以后的讨论中,不必具体画出曲面)(21x x f t , =的图形,只须在21x x ,平面上变动常数c 画出曲线簇c x x f =)(21, . 例1.5 在21x x ,坐标平面上画出目标函数 2 22121)(x x x x f +=,的等高线. 解 因为当取0>c 时,曲线c x x =+2 221表示是以原点为圆心,半径为c 的圆.因此 等高线是一簇以原点为圆心的同心圆(如图1.6所示). (三)几何意义及图解法 当在21x x , 坐标平面上分别画出约束集合D 以及目标函数)(21x x f , 的等高线后,不难求出二维最优化问题的最优解.下面举例说明. 例1.6 用图解法求解二维最优化问题 2212221212min[(2)(2)]1..00x x x x s t x x +++?+≤?? ≥≥??, ,, . 解 由例1.4得到约束集合D (如图1.7所示).目标函数的等高线是以T ]22[--,为圆心的同心圆,并且这簇同心圆的外圈比内圈的目标函数值大.因此,这一问题成为在约束集 合中找一点T x x ][21, ,使其落在半径最小的那个同心圆上.不难看出,问题的最优解 图1.6 T T x x X ]00[][21*,,==. 图1.7 二、最优化问题的迭代解法 (一)迭代方法 在经典极值问题中,解析法虽然具有概念简明,计算精确等优点,但因只能适用于简单或特殊问题的寻优,对于复杂的工程实际问题通常无能为力,所以极少使用. 最优化问题的迭代算法是指:从某一选定的初始点出发,根据目标函数、约束函数在该点的某些信息,确定本次迭代的一个搜索方向和适当的步长,从而到达一个新点,用式子表示即为 1012k k k k X X t P k +=+=L , ,,, (1.2) 式中k X 代表前一次已取得的迭代点,在开始计算时为迭代初始点0X ,1+k X 代表新的迭代点,k P 代表第k 次迭代计算的搜索方向,k t 代表第k 次迭代计算的步长因子. 按照式(1.2)进行一系列迭代计算所根据的思想是所谓的“爬山法”,就是将寻求函数极小点(无约束或约束极小点)的过程比喻为向“山”的顶峰攀登的过程,始终保持向“高”的方向前进,直至达到“山顶”.当然“山顶”可以理解为目标函数的极大值,也可以理解为极小值,前者称为上升算法,后者称为下降算法.这两种算法都有一个共同的特点,就是每前进一步都应该使目标函数有所改善,同时还要为下一步移动的搜索方向提供有用的信息.如果是下降算法,则序列迭代点的目标函数值必须满足下列关系 011()()()()k k f X f X f X f X +>>>>L . 如果是求一个约束的极小点,则每一次迭代的新点Λ,, 21X X 都应该在约束可行域内,即 012k X D k ∈=L ,,,, 图1.8为迭代过程示意图. 由上面的迭代过程可知,在迭代过程中有两个规则需要确定:一个是搜索方向k P 的选 取;一个是步长因子k t 的选取.一旦k P 和k t 的选取方法确定,则一种迭代算法就确定,即不同的规则就对应不同的最优化方法. (二)收敛速度与计算终止准则 (1)收敛速度 作为一个算法,能够收敛于问题的最优解当然是必要8的,但仅收敛还不够,还必须能以较快的速度收敛,这才是好的算法. 图1.8 定义1.1 设由算法A 产生的迭代点列{}k X 在某种“||·||”的意义下收敛 于点* X ,即0 ||||lim *=-∞ →X X k k ,若存在实数0>α及一个与迭代次数k 无关 的常数0>q ,使得 ,q X X X X k k k =--+∞→α |||||| ||lim **1 则称算法A 产生的迭代点列}{k X 具有α阶收敛速度,或称算法A 为α阶收敛的.特别地: ① 当01 >=q ,α时,称迭代点列}{k X 具有线性收敛速度或称算法A 为线性收敛的. ② 当021>< α时,或0,1==q α时,称迭代点列}{k X 具有超线性收敛速度或称算法A 是超线性收敛. ③ 当2=α时,迭代点列}{k X 叫做具有二阶收敛速度或算法A 是二阶收敛的. 一般认为,具有超线性收敛或二阶收敛的算法是较快速的算法. 例1.7 设一算法A 产生迭代点列 } 1 {k X k =,它收敛于点0*=X ,试判定算法A 的收敛速度. 解 因为 1|01 ||011 | lim =--+∞→k k k , 即取 01,1>==q α. 所以算法A 具有线性收敛速度. 例1.8 设一算法A 产生迭代点列} 1{k k k X = ,它收敛于0*=X ,试确定A 的收敛速 度. 解 因为 11 )1(lim |01 || 0)1(1 | lim +∞→+∞→+=--+k k k k k k k k k k 11lim( )01k k k k k +→∞ =?=+, 即取0,1==q α. 所以A 是超线性收敛的. (2)计算终止准则 用迭代方法寻优时,其迭代过程不能无限制地进行下去,那么什么时候截断这种迭代呢?这就是迭代什么时候终止的问题. 从理论上说,当然希望最终迭代点到达理论极小点,或者使最终迭代点与理论极小点之间的距离足够小时才终止迭代.但是这在实际上是办不到的.因为对于一个待求的优化问题,其理论极小点在哪里并不知道.所知道的只是通过迭代计算获得的迭代点列}{k X ,因此只能从点列所提供的信息来判断是否应该终止迭代. 对于无约束优化问题通常采用的迭代终止准则有以下几种: ①点距准则 相邻两迭代点1+k k X X , 之间的距离已达到充分小,即 ε≤-+||||1k k X X , 上式中ε是一个充分小的正数,代表计算精度. ②函数下降量准则 相邻两迭代点的函数值下降量已达到充分小.当1|)(|1<+k X f 时,可用函数绝对下降量准则 ε≤-+|)()(|1k k X f X f . 当1|)(|1>+k X f 时,可用函数相对下降量准则 ε ≤-++|)() ()(| 11k k k X f X f X f . ③梯度准则 目标函数在迭代点的梯度已达到充分小,即 ε≤?+||)(||1k X f . 这一准则对于定义域上的凸函数是完全正确的.若是非凸函数,有可能导致误把驻点作为最 优点.(凸函数的定义请参见第二章2.6节) 对于约束优化问题,不同的优化方法有各自的终止准则. 综上所述,优化算法的基本迭代过程如下: ① 选定初始点0X ,置0=k . ② 按照某种规则确定搜索方向k P . ③ 按某种规则确定k t 使得 )()(k k k k X f P t X f <+. ④ 计算 k k k k P t X X +=+1. ⑤ 判定1+k X 是否满足终止准则.若满足,则打印1+k X 和)(1+k X f ,停机;否则置1+=k k ,转②. 上述算法用框图表达如图1.9. §1.3 最优化算法分类 所谓优化算法,其实就是一种搜索过程或规则,它是基于某种思想和机制,通过一定的途径或规则来得到满足用户要求的问题的解. 就优化机制与行为而分,目前工程中常用的优化算法主要可分为:经典算法、构造型算法、改进型算法、基于系统动态演化的算法和混合型算法等. (1)经典算法.包括线性规划、动态规划、整数规划和分枝定界等运筹学中的传统算法,其算法计算复杂性一般很大,只适于求解小规模问题,在工程中往往不实用. (2)构造型算法.用构造的方法快速建立问题的解,通常算法的优化质量差,难以满足工程需要.譬如,调度问题中的典型构造型方法有:Johnson 法、Palmer 法、Gupta 法、CDS 法、Daunenbring 的快速接近法、NEH 法等. (3)改进型算法,或称邻域搜索算法.从任一解出发,对其邻域的不断搜索和当前解 的替换来实现优化.根据搜索行为,它又可分为局部搜索法和指导性搜索法. ①局部搜索法.以局部优化策略在当前解的邻域中贪婪搜索,如只接受优于当前解的状态作为下一当前解的爬山法;接受当前解邻域中的最好解作为下一当前解的最陡下降法等. ②指导性搜索法.利用一些指导规则来指导整个解空间中优良解的探索,如SA 、GA 、TS 等. (4)基于系统动态演化的算法.将优化过程转化为系统动态的演化过程,基于系统动态的演化来实现优化,如神经网络和混沌搜索等. (5)混合型算法.指上述各算法从结构或操作上相混合而产生的各类算法. 优化算法当然还可以从别的角度进行分类,如确定性算法和不确定性算法,局部优化算法和全局优化算法等. §1.4 组合优化问题简介 一、组合优化问题建模 优化问题涉及的工程领域很广,问题种类与性质繁多,归纳而言,最优化问题可分为函数优化问题和组合优化问题两大类,上一节介绍的最优化数学模型属于函数优化问题,该函数优化的对象是一定区间内的连续变量,而组合优化的对象则是解空间中的离散状态.本节重点介绍组合优化问题. 组合优化问题是通过对数学方法的研究去寻找离散事件的最优编排、分组、次序或筛选等,所研究的问题涉及信息技术、经济管理、工业工程、交通运输、通信网络等诸多领域,该问题数学模型可表示为 ?? ?=≥Ω ∈,, 0)(0)(..) (min X H X G t s X f X 其中)(X f 为目标函数,)(X G 和)(X H 为约束函数,X 为决策变量,Ω表示有限个点组 成的集合. 一个组合优化问题可用3个参数)(f D ,,Ω表示,其中Ω表示决策变量的定义域,D 表示可行解区域}0)(0)(|{=≥Ω∈=X H X G X X D ,,,D 中的任何一个元素称为该问题的 可行解,f 表示目标函数,满足 }|)(m in{)(* D X X f X f ∈=的可行解*X 称为该问题的最优解.组合最优化问题的特点是可行解集合为有限集.由直观可知,只要将Ω中有限个 点逐一判别是否满足约束条件0)(0)(=≥X H X G ,和比较目标函数值的大小,该问题的最优解一定存在并可以求得,下面是三个典型的组合优化问题. 例1.9 0-1背包问题(knapsack problem ) 设有一个容积为b 的背包,n 个体积分别为),,2,1(n i a i Λ=,价值分别为 ),,2,1(n i c i Λ=的物品,如何以最大的价值装包?这个问题称为0-1背包问题.用数学模型 表示为 ∑=n i i i x c 1 max , (1.3) ?????=∈≤∑=)5.1(21}10{)4.1(..1 .,,,,,,n i x b x a t s i n i i i Λ 其中目标(1.3)欲使包内所装物品的价值最大,式(1.4)为包的能力限制,式(1.5)表示 i x 为二进制变量,1=i x 表示装第i 个物品,0=i x 则表示不装. 例1.10 旅行商问题(TSP ,traveling salesman problem ) 一个商人欲到n 个城市推销商品,每两个城市i 和j 之间的距离为ij d ,如何选择一条道 路使得商人每个城市走一遍后回到起点且所走路径最短.TSP 还可以细分为对称和非对称距离两大类问题.当对任意的j i ,时都有 ji ij d d =,则称该TSP 为对称距离TSP ,否则称为 非对称距离TSP .对一般的TSP ,它的一种数学模型描述为 ∑≠j i ij ij x d min , (1.6) 11 ,112(1.7)112(1.8)..||12||2{12}(1.9){01}12(1.10) n ij j n ij i ij i j S ij x i n x j n s t x S S n S n x i j n i j ==∈?==????==?? ≤-≤≤-????∈=≠? ∑∑∑L L L L ,,, ,,,,,,,, ,,,,,,,,,,,,. 以上是基于图论的数学模型.其中式(1.10)中的决策变量 ij x =1表示商人行走的路线包含 从城市i 到城市j 的路径,0 =ij x 表示商人没有选择走这条路.j i ≠的约束可以减少变量 的个数,使得共有)1(-?n n 个决策变量.目标(1.6)要求距离之和最小.式(1.7)要求商人从城市i 出来一次,式(1.8)要求商人走入城市j 只有一次.式(1.7)和式(1.8)表示每个城市经过一次.仅有式(1.7)和式(1.8)的约束无法避免回路的产生,一条回路是由)1(n k k ≤≤个城市和k 条弧组成,因此,式(1.9)约束旅行商在任何一个城市子集中不形成回路,其中||S 表示集合S 中元素个数. 例1.11 聚类问题 m 维空间上的n 个模式}21|{n i X i ,,, Λ=要求聚类成k 类,使得各类本身内的点最相近,即∑=-n i p p i R X 0)(||||min ,其中p R 为第p 类的中心, ∑==p n i p i p p X n R 1 )(1,k p ,,,Λ21 =,p n 为第p 类中的点数. 二、算法复杂性 前面给大家介绍的三个组合优化问题例子,模型建立都比较简单,但要求它们的最优解却很困难,而解模型的困难主要原因是所谓的“组合爆炸”,如聚类问题的可能划分方式有 !/k k n 个,TSP 问题有!n 个.显然状态数量随问题规模呈超指数增长,若计算机每秒处理1 亿种排列,则列举20个城市问题的20!种排列约需几百年.如此巨大的计算量是无法承受的,更不用谈更大规模问题的求解,因此解决这些问题的关键在于寻求有效的优化算法,也正是由于组合优化问题算法的复杂性,激起了人们对它的理论与算法研究的兴趣. 算法的复杂性是指算法对时间复杂性和对空间复杂性.按照算法复杂性求解的难易程 度,可把组合优化问题分为P 类,NP 类和NP 完全类. 算法或问题的复杂性一般表示为问题规模n (如TSP 问题中的城市数)的函数,时间的复杂性记为)(n T ,空间的复杂性记为)(n S .在算法分析和设计中,沿用实用性的复杂性概念,即把求解问题的关键操作,如加、减、乘,比较等运算指定为基本操作,算法执行基本操作的次数则定义的算法的时间复杂性,算法执行期间占用的存储单元则定义为算法的空间复杂性.P 类问题指具有多项式时间求解算法的问题类.许多优化问题仍没有找到求得最优解的多项式时间算法,称这种比P 类问题更广泛的问题为非确定型多项式算法的问题类,即NP 问题. 三、NP 完全问题 离散问题的求解常常要从有限个方案中选出一个满意的结果来 ,也许有人认为,从有限个方案中挑选一个,总是比较容易的.然而,事实并非如此,关键在于问题的规模.由于计算机的出现,人们对问题的求解在观念上发生了改变,一个在理论上可解的问题如果在求解时需要花费相当多,以至于不合理的时间(如几百年甚至更长时间),我们不能认为它已解决,而应当努力寻找更好的算法. 如何比较算法的好坏呢?从不同的角度出发可以有不同的回答.这里,仅就算法的计算速度作一个十分粗略的比较. 设有一台每小时能进行M 次运算的计算机.并设问题已有两种不同的算法,算法A 对规模为n 的问题约需作2 n 次运算,算法B 则约需作n 2次运算.运用算法A 在一个小时内大 约可解一个规模为M 的问题,而算法B 则大约可解一个规模为M 2log 的问题. 现在假设计算机有了改进,例如计算速度提高了100倍.此时,利用算法A 能求解的问题规模增大了10倍,利用算法B 可解的问题规模只增加了7100log 2<.前者得到了成倍的增加,而后者则几乎没有什么改变,今天无法求解的问题,将来也很少有希望解决.由于这一原因,对算法作如下分类. 定义1.2(多项式算法) 设A 是求解某类问题D 的一个算法,n 为问题D 的规模,用 )(n D f A ,表示用算法A 在计算机上求解这一问题时需作的初等运算的次数.若存在一个多 项式)(n P 和正整数N ,当N n ≥时,总有)(),(n P n D f A ≤(不论求解的D 是怎样的具体实例),则称算法A 是求解问题D 的一个多项式算法. 定义1.3(指数算法) 设算法B 是求解某类问题D 的一个算法,若存在一个常数0>k ,对任意n ,总可以找到问题D 的一个规模为n 的实例,用算法B 求解时,所需的计算量约为 )2()(kn B o n D f =,,则称B 为求解问题D 的一个指数算法. 多项式算法被称为是“好”算法(或有效算法),而指数算法则一般认为是“坏”算法,因为它只能用来求解规模很小的问题. 这样看来,对一个问题只有在找到求解它的多项式算法后才能较为放心.然而十分可惜的是,对于许多具有广泛应用价值的离散模型,人们至今仍未找到多项式算法.现在的任何算法在最坏的情况下计算量均可达到或接近n 2. 1971年和1972年,S. Cook 和R. Karp 分别发表了相关论文,奠定了NP 完全理论基础.Cook 指出,NP 完全类问题,具有两个性质: (1)这类问题中的任何一个问题至今均未发现有多项式算法. (2)只要其中任一个问题找到了多项式算法,那么其他所有问题也就有了多项式算法. 现在,NP 完全类中的问题已被扩充到了四千多个,其中包括前面讨论的旅行商问题.对它们的研究使人们越来越相信这样一个猜测:对这类问题也许根本不存在多项式算法. 第二章 最优化问题数学基础 为了便于学习最优化方法,本章将对与优化方法密切相关的数学知识作一简要介绍,而有些数学知识将在讲解各种算法时,随之介绍. §2.1 二次型与正定矩阵 一、二次型与实对称矩阵 二次型理论在最优化设计中应用十分广泛.应用矩阵的乘法运算,二次型与实对称矩阵紧密地联系在一起了,从而二次型的基本问题又可转化成实对称矩阵问题. 二次型理论问题起源于化二次曲线和二次曲面的方程为标准形式的问题.推广到n 维空间中,二次超曲面的一般方程为 , ,,,∑∑===+++++ ++++ +++=n i n j j i ij n nn n n n n n n n n n x x a x a x x a x x a x x a x a x x a x x a x x a x a x x x f 11 22211222 2221221112112211121)(ΛΛ ΛΛΛΛΛΛΛΛΛΛΛΛΛΛ 用矩阵表示可简记为 ,,,,,,,AX X x x x A x x x x x a x x x f T n i n j n n j i ij n =??? ?? ???????==∑∑==11 212121][)(M ΛΛ 其中矩阵A 的元素 ) (j i a a ji ij ≠=正是二次型的 j i x x 项的系数的一半,ii a 是二次型的2 i x 项 的系数.因此,二次型和它的矩阵A 是相互唯一决定的,且T A A =. 二、正定矩阵 定义2.1 如果二次型 ∑∑====n i n j T j i ij n AX X x x a x x x f 11 21)(,,,Λ 对于任何一组不全为零的数n x x x ,,, Λ21恒有 0)(21>=AX X x x x f T n ,,,Λ, 则称)(21n x x x f ,,, Λ正定,且二次型矩阵A 也称为正定. 简言之,一个对称矩阵A 如果是正定的,则二次型)(21n x x x f ,,, ΛAX X T =对于所有非零向量X 其值总为正.类似可以给出定义,若二次型 0)(21≥=AX X x x x f T n ,,,Λ,则A 为半正定矩阵;若0≤AX X T ,则A 为半负定矩阵;若二次型AX X T 既不是半正定又不是半 负定,就称矩阵A 为不定的. 矩阵A 为正定的充要条件是它的行列式||A 的顺序主子式全部大于零,即 11121212221112 112122 12000 n n n n nn a a a a a a a a a a a a a a >>>L L L L L L L L ,,,. 由此可见,正定矩阵必然是非奇异的. 例2.1 判断矩阵 ?? ??? ?????=201032124A 是否正定. 解 ∵ 132 010321 24083 22404>=>=>,,, ∴ A 是正定的. §2.2 方向导数与梯度 一、方向导数 所谓方向导数的概念是作为偏导数的一个推广而引入的,它主要研究函数沿任一给定方向的变化率. 定义2.2 设1 :R R f n →在点0X 处可微,P 是固定不变的非零向量,e 是方向P 上的 单位向量,则称极限 t X f te X f P X f t ) ()(lim )(0000-+=??+ → (2.1) 为函数)(X f 在点0X 处沿P 方向的方向导数,式中P X f ??) (0是它的记号. 定义2.3 设1R R f n →:是连续函数,n R X ∈0,n R P ∈且0≠P ,若存在0>δ, 当),0(δ∈t 时都有)()(00X f tP X f <+,则称P 为f 在点0X 处的下降方向.若)()(00X f tP X f >+,则称P 为f 在点0X 处的上升方向. 由以上两个定义可立刻得到如下的结论: 若0)(0 (0>??P X f ,则)(X f 从0X 出发在0X 附近沿P 方向是上升. 事实上,若0 ) (0t 充分小时,根据式(2.1)必有 ) ()(00<-+t X f te X f , 即 )()(0X f X f <, 其中te X X +=0是从0X 出发在P 方向上的点,说明)(X f 是下降的.同理可以说明,若 0) (0>??P X f ,则)(X f 是上升的. 二、梯度 定义2.4 以)(X f 的n 个偏导数为分量的向量称为)(X f 在X 处的梯度,记为 . ,,,2T n x X f x X f x X f X f ??? ?????????=?)()()()(1Λ 梯度也可以称为函数)(X f 关于向量X 的一阶导数. 以下几个特殊类型函数的梯度公式是常用的: (1)若c X f =)((常数),则O X f =?)(,即O c =?; (2) b X b T =?)(. 证 设T n T n x x x X b b b b ][][2121,,,,,,,ΛΛ==,则 ∑== n i i i T x b X b 1 . 于是)(X b T ?的第j 个分量是 .,,,,n j b x b x X b x j n i i i j T j Λ21)()(1 ==??=??∑= 所以b X b T =?)(. (3)X X X T 2)(=?. (4)若A 是对称矩阵,则 AX AX X T 2)(=?. 三、梯度与方向导数之间的关系 定理2.1 设1 R R f n →:在点0X 处可微,则 e X f P X f T )() (00?=??, 其中e 是P 方向上的单位向量. 证明在相应的数学分析中可找到(故略去). 由这个定理容易得到下列结论: (1) 若0)(0 ,则P 的方向是函数)(X f 在点0X 处的下降方向; (2) 若 0)(0>?P X f T ,则P 的方向是函数)(X f 在点0X 处的上升方向. 方向导数的正负决定了函数值的升降,而升降的快慢就由它的绝对值大小决定.绝对值越大,升降的速度就越快,即 00() ()T f X f X e P ?=?? = )()))(cos((1)(000X f e X f X f ?≤????,, 上式中的等号,当且仅当e 的方向与 )(0X f ?的方向相同时才成立. 由此可得如下重要结论(如图2.1所示): (1)梯度方向是函数值的最速上升方向; (2)函数在与其梯度正交的方向上变化率为零; (3)函数在与其梯度成锐角的方向上是上升的,而在与其梯度成钝角的方向上是下降的; (4)梯度反方向是函数值的最速下降方向. 对于一个最优化问题,为了尽快得到最优解,在每一步迭代过程中所选取的搜索方向P 总是希望它等于或者是靠近于目标函数的负梯度(即-)(X f ?) 的方向,这样才能使函数值下降的最快. 例 2.2 试求目标函数1)(2 221++=x x X f 在 点T X ]30[0,=处的最速下降方向,并求沿这个方 向移动一个单位长后新点的目标函数值. 解 因为 22 1122x x f x x f =??=??,, 所 以 最 速 下 降 方 向 是 ? ?? ???-=??????-=?-==6022)(3 021021x x x x X f . 这个方向上的单位向量是 ? ?????-=?-?-=10)() (00X f X f e . 故新点是 ? ?????=??????-+??????=+=20103001e X X , 对应目标函数值为 5120)(2 21=++=X f . §2.3 海色矩阵及泰勒展式 一、海色(Hesse )矩阵 前面说过,梯度)(X f ?是)(X f 关于X 的一阶导数,现在要问)(X f 关于X 的二阶导数是什么? 定义 2.5 设f :1R R n →,n R X ∈0,如果f 在点0X 处对于自变量X 的各分量的二 阶偏导数 20() (12) i j f X i j n x x ?=??L ,,,, 都存在,则称函数f 在点0X 处二阶可导,并且称矩阵 ?? ??? ????????? ??????????????????????????????=?2 022 02 102202 22021 202102210221 0202 )()()()() () ()() () ()(n n n n n x X f x x X f x x X f x x X f x X f x x X f x x X f x x X f x X f X f Λ ΛΛΛΛΛΛ 是f 在点0X 处的Hesse 矩阵. 在数学分析中已经知道,当f 在点0X 处的所有二阶偏导数为连续时有 图2.1 .,,,,,n j i x x f x x f i j j i Λ2122=???=??? 因此,在这种情况下Hesse 矩阵是对称的. 例2.3 求目标函数2 3132221233241432)(x x x x x x x x x X f -+-++=的梯度和Hesse 矩阵. 解 因为 ,,,31233 3212 22 2 321311 2464624x x x x x f x x x x f x x x x x f -+=??+-=??--=??, 所以 ?? ?? ??????-++---=?31233212 22 321312464624)(x x x x x x x x x x x X f . 又因为 2222 1213211213222212 2 2 23 3 1222212462f f f x x x x x x x x x f f f x x x x x x ???=-=-=-??????===-???,,,,,, 所以 ????? ??? ? ?------=?1321 312212264 2412222212)(x x x x x x x x X f . 例2.4 设1 R b R X R a n n ∈∈∈,, ,求线性函数 b X a X f T +=)( 在任意点X 处的梯度和Hesse 矩阵. 解 设T n T n x x x X a a a a ][][2121,,,,,,,ΛΛ==,则 ∑=+=n i i i n b x a x x x f 1 21)(,,,Λ, ,,,,,n i a x f i i Λ21==?? (2.2) ∴ a a a a X f T n ==?],,,[)(21Λ. 由式(2.2)进而知 ,,,,,,n j i x x f j i Λ2102==??? ∴ O X f =?)(2 (n n ?阶零矩阵). 例2.5 设n n R A ?∈是对称矩阵,1R c R b n ∈∈,,求二次函数=)(X f c X b AX X T T ++21在任意点处的梯度和Hesse 矩阵. 解 设n n ij a A ?=)(,T n T n x x x X b b b b ][][2121,,,,,,,ΛΛ==,则 . ++,,,c x b x x a x x x f n i i i n i n j j i ij n ∑∑∑====1112121)(Λ 将它对各变量)21(n i x i ,,, Λ=求偏导数,得 ,1111??????????+??????? ???????=??????????? ???++=??????????????????=?∑∑∑∑====n n j j nj n j j j n j n j nj n j j j n b b x a x a b x a b x a x X f x X f X f M M M M 11111)()()( ∴ b AX X f +=?)(. 在上式中显然 ,,,, ,=1n i b x a x X f n j i j ij i Λ21)(=+??∑= 再对它们求偏导数得 ,,,,,,n j i a x x f ij j i Λ212==??? ∴ A a a a a a a a a a X f nn n n n n =??????? ?????=?Λ ΛΛΛΛΛ Λ21222 21 112112 )(. 以上例子说明,n 元函数求导与一元函数的求导在形式上是一致的,即线性函数的一阶 导数为常向量,其二阶导数为零矩阵;而二次函数的一阶导数为线性向量函数,二阶导数为常矩阵. 最后介绍在今后的计算中要用到的向量函数的导数. 定义 2.6 设n m n R X R R H ∈→0,:,记T m X h X h X h X H )]()()([)(21,,,Λ=,如果 )21()(m i X h i ,,,Λ=在点0X 处对于自变量T n x x x X ][21,,,Λ=的各分量的偏导数 )21() (0n j x X h j i ,,,Λ=??都存在,则称向量函数)(X H 在点0X 处是一阶可导的,并且称 矩阵 10101012 2020201 2000012 ()() ()()() ()()()() ()n n m n m m m n h X h X h X x x x h X h X h X x x x H X h X h X h X x x x ???????? ???? ? ?? ???? ?????=?? ??? ? ??????????? ?L L L L L L L 是)(X H 在点0X 处的一阶导数或Jacobi 矩阵,简记为 )()(00X H X H n m ??=?. 由于n 元函数1 R R f n →:的梯度是向量函数 , ,,,2T n x X f x X f x X f X f ??? ?????????=?)()()()(1Λ 所以)(X f ?的一阶导数或Jacobi 矩阵为 112111222212()()()()()()()()()()n n n n n n n n f X f X f X x x x x x x f X f X f X f X x x x x x x f X f X f X x x x x x ????? ??????? ????? ? ? ??????????? ???? ???????????????? ? ? ?????=????????????? ?????? ???????? ? ???????? ?????? L L L L L L 22 22 1 12222221222 2221 2 ())()()) ()()()()()n n n n n f X f X x x x f X f X f X x x x x f X f X f X x x x x x ??????????????????????== ?????????????????????????L L L L L L L , 122221()()()()()()()()()()n n n n n n n n f X f X f X x x x x x x f X f X f X f X x x x x x x f X X f X x x x x x x ????????????????? ? ? ?????????????????? ????????????? ? ? ?????=?????????? ?????? ????????????? ?? ??????????? ????L L L L L L L 2222112 12222 221222222 12()(()()(()()()() ()n n n n n f X f X f X x x x x x f X f X f X f X x x x x x f X f X f X x x x x x ????? ?????????????? ?????==??????????????????????????L L L L L , 即 )()(2X f X f n n ?=???. 据此,从上式得知,函数梯度的Jacobi 矩阵即为此函数的Hesse 矩阵. 下面给出今后要用到的几个公式: (1)O c =?,其中c 是分量全为常数的n 维向量,O 是n n ?阶零矩阵. (2)I X =?,其中X 是n 维向量,I 是n n ?阶单位矩阵. (3)A AX =?)(,其中A 是n m ?阶矩阵. (4)设)()(0tP X f t +=?,其中1R R f n →:,1 R R →1:?,则 P tP X f P t P tP X f t T T )()()()(020+?=''+?='??,. 二、泰勒展开式 多元函数的泰勒展开在最优化方法中十分重要,许多方法及其收敛性的证明是从它出发的,这里给出泰勒展开定理及其证明. 定理2.2 设1 R R f n →:具有二阶连续偏导数,则 P X f P P X f X f P X f T T )(21)()()(2 ?+ ?+=+, (2.3) 其中P X X θ+=,而10<<θ. 证 设)()(tP X f t +=?,于是 )()0(X f =?,)()1(P X f +=?. 对)(t ?按一元函数在0=t 点展开,得到 五种最优化方法 1.最优化方法概述 1.1最优化问题的分类 1)无约束和有约束条件; 2)确定性和随机性最优问题(变量是否确定); 3)线性优化与非线性优化(目标函数和约束条件是否线性); 4)静态规划和动态规划(解是否随时间变化)。 1.2最优化问题的一般形式(有约束条件): 式中f(X)称为目标函数(或求它的极小,或求它的极大),si(X)称为不等式约束,hj(X)称为等式约束。化过程就是优选X,使目标函数达到最优值。 2.牛顿法 2.1简介 1)解决的是无约束非线性规划问题; 2)是求解函数极值的一种方法; 3)是一种函数逼近法。 2.2原理和步骤 3.最速下降法(梯度法) 3.1最速下降法简介 1)解决的是无约束非线性规划问题; 2)是求解函数极值的一种方法; 3)沿函数在该点处目标函数下降最快的方向作为搜索方向; 3.2最速下降法算法原理和步骤 4.模式搜索法(步长加速法) 4.1简介 1)解决的是无约束非线性规划问题; 2)不需要求目标函数的导数,所以在解决不可导的函数或者求导异常麻烦的函数的优化问题时非常有效。 3)模式搜索法每一次迭代都是交替进行轴向移动和模式移动。轴向移动的目的是探测有利的下降方向,而模式移动的目的则是沿着有利方向加速移动。 4.2模式搜索法步骤 5.评价函数法 5.1简介 评价函数法是求解多目标优化问题中的一种主要方法。在许多实际问题中,衡量一个方案的好坏标准往往不止一个,多目标最优化的数学描述如下:min (f_1(x),f_2(x),...,f_k(x)) s.t. g(x)<=0 传统的多目标优化方法本质是将多目标优化中的各分目标函数,经处理或数学变换,转变成一个单目标函数,然后采用单目标优化技术求解。常用的方法有“线性加权和法”、“极大极小法”、“理想点法”。选取其中一种线性加权求合法介绍。 5.2线性加权求合法 6.遗传算法 智能优化方法是通过计算机学习和存贮大量的输入-输出模式映射关系,进 最优化方法及其应用 作者:郭科 出版社:高等教育出版社 类别:不限 出版日期:20070701 最优化方法及其应用 的图书简介 系统地介绍了最优化的理论和计算方法,由浅入深,突出方法的原则,对最优化技术的理论作丁适当深度的讨论,着重强调方法与应用的有机结合,包括最优化问题总论,线性规划及其对偶问题,常用无约束最优化方法,动态规划,现代优化算法简介,其中前八章为传统优化算法,最后一章还给出了部分优化问题的设计实例,也可供一般工科研究生以及数学建模竞赛参赛人员和工程技术人员参考, 最优化方法及其应用 的pdf电子书下载 最优化方法及其应用 的电子版预览 第一章 最优化问题总论1.1 最优化问题数学模型1.2 最优化问题的算法1.3 最优化算法分类1.4 组合优化问題简卉习题一第二章 最优化问题的数学基础2.1 二次型与正定矩阵2.2 方向导数与梯度2.3 Hesse矩阵及泰勒展式2.4 极小点的判定条件2.5 锥、凸集、凸锥2.6 凸函数2.7 约束问题的最优性条件习题二第三章 线性规划及其对偶问题3.1线性规划数学模型基本原理3.2 线性规划迭代算法3.3 对偶问题的基本原理3.4 线性规划问题的灵敏度习题三第四章 一维搜索法4.1 搜索区间及其确定方法4.2 对分法4.3 Newton切线法4.4 黄金分割法4.5 抛物线插值法习题四第五章 常用无约束最优化方法5.1 最速下降法5.2 Newton法5.3 修正Newton法5.4 共轭方向法5.5 共轭梯度法5.6 变尺度法5.7 坐标轮换法5.8 单纯形法习題五第六章 常用约束最优化方法6.1外点罚函数法6.2 內点罚函数法6.3 混合罚函数法6.4 约束坐标轮换法6.5 复合形法习题六第七章 动态规划7.1 动态规划基本原理7.2 动态规划迭代算法7.3 动态规划有关说明习题七第八章 多目标优化8.1 多目标最优化问题的基本原理8.2 评价函数法8.3 分层求解法8.4目标规划法习题八第九章 现代优化算法简介9.1 模拟退火算法9.2遗传算法9.3 禁忌搜索算法9.4 人工神经网络第十章 最优化问题程序设计方法10.1 最优化问题建模的一般步骤10.2 常用最优化方法的特点及选用标准10.3 最优化问题编程的一般过程10.4 优化问题设计实例参考文献 更多 最优化方法及其应用 相关pdf电子书下载 陆吾生教授是加拿大维多利亚大学电气与计算机工程系 (Dept. of Elect. and Comp. Eng. University of Victoria) 的正教授, 且为我校兼职教授,曾多次来我校数学系电子系讲学。陆吾生教授的研究方向是:最优化理论和小波理论及其在1维和2维的数字信号处理、数字图像处理、控制系统优化方面的应用。 现陆吾生教授计划在 2007 年 10-11 月来校开设一门为期一个月的短期课程“最优化理论及其应用”(每周两次,每次两节课),对象是数学系、计算机系、电子系的教师、高年级本科生及研究生,以他在2006年出版的最优化理论的专著作为教材。欢迎数学系、计算机系、电子系的研究生及高年级本科生选修该短期课程,修毕的研究生及本科生可给学分。 上课地点及时间:每周二及周四下午2:00开始,在闵行新校区第三教学楼326教室。(自10月11日至11月8日) 下面是此课程的内容介绍。 ----------------------------------- 最优化方法及应用 I. 函数的最优化及应用 1.1 无约束和有约束的函数优化问题 1.2 有约束优化问题的Karush-Kuhn-Tucker条件 1.3 凸集、凸函数和凸规划 1.4 Wolfe对偶 1.5 线性规划与二次规划 1.6 半正定规划 1.7 二次凸锥规划 1.8 多项式规划 1.9解最优化问题的计算机软件 II 泛函的最优化及应用 2.1 有界变差函数 2.2 泛函的变分与泛函的极值问题 2.3 Euler-Lagrange方程 2.4 二维图像的Osher模型 2.5 泛函最优化方法在图像处理中的应用 2.5.1 噪声的消减 2.5.2 De-Blurring 2.5.3 Segmentation ----------------------------------------------- 注:这是一门约二十学时左右的短期课程,旨在介绍函数及泛函的最优化理论和方法,及其在信息处理中的应用。只要学过一元及多元微积分和线性代数的学生就能修读并听懂本课程。课程中涉及到的算法实现和应用举例都使用数学软件MATLAB 华东师大数学系 《最优化方法与应用》 实验指导书 信息与计算科学系编制 1 实验目的 基于单纯形法求解线性规划问题,编写算法步骤,绘制算法流程图,编写单纯形法程序,并针对实例完成计算求解。 2实验要求 程序设计语言:C++ 输入:线性规划模型(包括线性规划模型的价值系数、系数矩阵、右侧常数等) 输出:线性规划问题的最优解及目标函数值 备注:可将线性规划模型先转化成标准形式,也可以在程序中将线性规划模型从一般形式转化成标准形式。 3实验数据 123()-5-4-6=Min f x x x x 121231212320 324423230,,03-+≤??++≤??+≤??≥? x x x x x x st x x x x x 1 实验目的 基于线性搜索的对分法、Newton 切线法、黄金分割法、抛物线法等的原理及方法,编写算法步骤和算法流程图,编写程序求解一维最优化问题,并针对实例具体计算。 2实验要求 程序设计语言:C++ 输入:线性搜索模型(目标函数系数,搜索区间,误差限等) 输出:最优解及对应目标函数值 备注:可从对分法、Newton 切线法、黄金分割法、抛物线法中选择2种具体的算法进行算法编程。 3实验数据 2211 ()+-6(0.3)0.01(0.9)0.04 = -+-+Min f x x x 区间[0.3,1],ε=10-4 实验三 无约束最优化方法 1实验目的 了解最速下降法、牛顿法、共轭梯度法、DFP 法和BFGS 法等的基本原理及方法,掌握其迭代步骤和算法流程图,运用Matlab 软件求解无约束非线性多元函数的最小值问题。 2实验要求 程序设计语言:Matlab 针对实验数据,对比最速下降法、牛顿法、共轭梯度法、DFP 法和BFGS 法等算法,比较不同算法的计算速度和收敛特性。 3实验数据 Rosenbrock's function 222211()(100)+(1-)=-Min f x x x x 初始点x=[-1.9, 2],,ε=10-4 最优化方法及其Matlab程序设计 1.最优化方法概述 在生活和工作中,人们对于同一个问题往往会提出多个解决方案,并通过各方面的论证,从中提取最佳方案。最优化方法就是专门研究如何从多个方案中科学合理地提取出最佳方案的科学。最优化是每个人,每个单位所希望实现的事情。对于产品设计者来说,是考虑如何用最少的材料,最大的性能价格比,设计出满足市场需要的产品。对于企业的管理者来说,则是如何合理、充分使用现有的设备,减少库存,降低能耗,降低成本,以实现企业的最大利润。 由于优化问题无所不在,目前最优化方法的应用和研究已经深入到了生产和科研的各个领域,如土木工程、机械工程、化学工程、运输调度、生产控制、经济规划、经济管理等,并取得了显著的经济效益和社会效益。 用最优化方法解决最优化问题的技术称为最优化技术,它包含两个方面的内容: 1)建立数学模型。 即用数学语言来描述最优化问题。模型中的数学关系式反映了最优化问题所要达到的目标和各种约束条件。 2)数学求解。 数学模型建好以后,选择合理的最优化算法进行求解。 最优化方法的发展很快,现在已经包含有多个分支,如线性规划、整数规划、非线性规划、动态规划、多目标规划等。 2.最优化方法(算法)浅析 最优化方法求解很大程度上依赖于最优化算法的选择。这里,对最优化算法做一个简单的分类,并对一些比较常用的典型算法进行解析,旨在加深对一些最优化算法的理解。 最优化算法的分类方法很多,根据不同的分类依据可以得到不同的结果,这里根据优化算法对计算机技术的依赖程度,可以将最优化算法进行一个系统分类:线性规划与整数规划;非线性规划;智能优化方法;变分法与动态规划。 2.1 线性规划与整数规划 线性规划在工业、农业、商业、交通运输、军事和科研的各个研究领域有广泛应用。例如,在资源有限的情况下,如何合理使用人力、物力和资金等资源,以获取最大效益;如何组织生产、合理安排工艺流程或调制产品成分等,使所消耗的资源(人力、设备台时、资金、原始材料等)为最少等。 线性规划方法有单纯形方法、大M法、两阶段法等。 整数规划有割平面法、分枝定界法等。 2.2 非线性规划 20世纪中期,随着计算机技术的发展,出现了许多有效的算法——如一些非线性规划算法。非线性规划广泛用于机械设计、工程管理、经济生产、科学研究和军事等方面。 1 2 ( ( 最优化方法部分课后习题解答 1.一直优化问题的数学模型为: 习题一 min f (x ) = (x ? 3)2 + (x ? 4)2 ? g (x ) = x ? x ? 5 ≥ ? 1 1 2 2 ? 试用图解法求出: s .t . ?g 2 (x ) = ?x 1 ? x 2 + 5 ≥ 0 ?g (x ) = x ≥ 0 ? 3 1 ??g 4 (x ) = x 2 ≥ 0 (1) 无约束最优点,并求出最优值。 (2) 约束最优点,并求出其最优值。 (3) 如果加一个等式约束 h (x ) = x 1 ? x 2 = 0 ,其约束最优解是什么? * 解 :(1)在无约束条件下, f (x ) 的可行域在整个 x 1 0x 2 平面上,不难看出,当 x =(3,4) 时, f (x ) 取最小值,即,最优点为 x * =(3,4):且最优值为: f (x * ) =0 (2)在约束条件下, f (x ) 的可行域为图中阴影部分所示,此时,求该问题的最优点就是 在约束集合即可行域中找一点 (x 1 , x 2 ) ,使其落在半径最小的同心圆上,显然,从图示中可 以看出,当 x * = 15 , 5 ) 时, f (x ) 所在的圆的半径最小。 4 4 ?g (x ) = x ? x ? 5 = 0 ? 15 ?x 1 = 其中:点为 g 1 (x ) 和 g 2 (x ) 的交点,令 ? 1 1 2 ? 2 求解得到: ? 4 5 即最优点为 x * = ? ?g 2 (x ) = ?x 1 ? x 2 + 5 = 0 15 , 5 ) :最优值为: f (x * ) = 65 ?x = ?? 2 4 4 4 8 (3).若增加一个等式约束,则由图可知,可行域为空集,即此时最优解不存在。 2.一个矩形无盖油箱的外部总面积限定为 S ,怎样设计可使油箱的容量最大?试列出这个优 化问题的数学模型,并回答这属于几维的优化问题. 解:列出这个优化问题的数学模型为: max f (x ) = x 1x 2 x 3 ?x 1x 2 + 2x 2 x 3 + 2x 1x 3 ≤ S 本科毕业论文 (2014届) 题目:最优化求解法在实际问题中的应用学院:计算机与科学技术学院 专业:数学与应用数学 班级:10数本班 学号:1006131084 姓名:严慧 指导老师:孙钢钢 目录 1.摘要 (3) 2.关键字 (3) 3.引言 (3) 4.最优化求解法在实际问题中的应用 (4) 4.1.无约束最优化问题的求解............................................... ....... 4.2.有约束最优化问题的求解............................................... ....... 4.3.线性规划问题的求解............................................... ........... ... 4.4.非线性规划问题的求解............................................... ........... 5.结束语................................................................................................参考书目 1.摘要:本文介绍最优化及相关知识在实际生活中的应用,主要是利用运筹 学来研究解决在实际生活中所遇到的一些问题,找到最优的解决方案,帮助人们提供最好的最有科学依据的最佳方法。 2.关键字:最优化,运筹学,生活,应用。 Abstract:This paper introduced the Optimization in the real life application,this is use of Operations research to solve the problem in real life,finding the best solution,and provide the best and scientifically valid solution to the people . Key words: Optimization, Operations research, life, application. 3.引言 随着社会迅速发展,各行各业中的竞争日益激烈,我们日常生活中好多事情都会牵扯到最优化,比如运输成本问题、效益分配问题等等。 什么是数学最优化问题,就是利用合理的安排和规划在一件事情或者问题上取得利润最大,时间最少,路线最短,损失最少的方法。所以最优化解决方法对实际生活现实社会的帮助作用很大。现如今,最优化解决问题已经渗透到生活中的方方面面。 一个好的决策也许会让你绝处逢生,反败为胜,譬如中国历史上田忌赛马的故事,田忌的聪明之处在于在已有的条件下,经过策划安排,选择了最好的方案,所以最后就是自己看似劣势也能取胜,筹划是非常重要的,这就是运筹学的魅力。 我们在中国的古代史上就可以看到中国古人已经具有很好的运筹学思想了,在战争中,两兵交战,各方都会有自己的军师,历史上有很多著名的军师,比如诸葛亮,刘伯温等。他们在战争中所起到的作用就是“运筹于帷幄之中,决胜于千里之外”,运筹学二字也是来源于此,了解敌方的军情,以此做出相应的对策,筹划最佳作战计划,做到“知己知彼百战不殆”,历史上也不乏一些以少胜多以弱胜强的战争,由此可见运筹学在军事中的力量有多强大。 现代社会中运筹学不仅在军事方面发挥着重要作用,同样在企业经营管理方面也是非常重要的,最优化理论最早是在工业领域产生的,它的对象可以是产 动态规划方法在计算机专业的应用 科目:最优化方法 姓名:*** 专业:计算机科学与技术 学号:201320405 指导老师:*** 日期:2014/1/9 动态规划方法在计算机专业的应用 摘要:最优化方法是一门很有用的学科,本文结合计算机专业,讨论了用动态规划方法解决计算最长公共子序列、最大字段和、背包问题的过程,并对比其它算法以说明动态规划方法的高效、实用。 关键词:动态规划,最优化,算法分析 Abstract: The optimization method is a useful discipline, this paper, a computer professional, discusses the process used to calculate the dynamic programming method to solve the longest common subsequence, the maximum field and, knapsack problem, and compared to other algorithms to illustrate the dynamic programming method efficient and practical. Keywords: dynamic programming, optimization, algorithm analysis 动态规划(dynamic programming)是通过结合子问题的解而解决整个问题的。(此处“programming”是指一种规划,而不是指写计算机代码。)动态规划适用于子问题不是独立的情况,也就是各子问题包含公共的子子问题。在这种情况下,若用分治法则会做很多不必要的工作,即重复地求解公共的子子问题。动态规划算法对每个公共的子子问题只求解一次,将其结果保存在一张表中,从而避免了每次遇到各个子问题时重新计算答案。 一、算法设计与优化 动态规划通常应用于最优化问题。此类问题可能有很多可行解。 最优化方法在化学工程中到的应用 摘要:随着高新技术、信息技术及计算机领域的飞速发展,最优化在众多领域的应用日益广泛,涉及问题的规模越来越大,复杂程 度越来越高。最优化方法主要运用数学方法研究各种系统的优化途径及方案,为决策者提供科学决策的依据。其目的在于针对所研究的系统,求得一个合理运用人力、物力和财力的最佳方案,发挥和提高系统的效能及效益,最终达到系统的最优目标。随着最优化理论的发展,最优化模型和算法的不断完善、创新,如遗传算法、神经网络的建立,进一步为建立可靠模型、精确求解铺平道路。在化工生产与产品销售过程中,最优化的踪迹更是无处不在,如生产设备最优化、生产流程最优化、运输管道最优化、产品利润最优化,以及涉及相关化学实验、化学反应动力学的最优化模型。最优化方法的日益成熟使化工生产低投入高产出得以实现,节约了资源提高了效率,降低了污染。而一系列最优化软件,如Matlab、lingo等在化工过程中得到了广泛应用。关键词:最优化;化学工程;应用现状;管网 最优化方法(也称运筹学方法)是近几十年形成的,主要运用数学方法研究各种系统的优化途径及方案,为决策者提供科学决策的依据[1]。随着科学技术,尤其是计算机技术发展,最优化方法已经在各个领域,如化学工程、生化工程、机械工程、土木工程、经济管理等,得到越来越广泛的运用[2]。化工过程系统最优化设计的研究在 过去二三十年中取得了很大的进展,这主要得益于计算及技术的发展,计算机的应用不仅仅体现在为大规模数值问题的处理提供了强有力 的工具, 而更多地体现在为过程设计的经验和艺术插上了数字化的 翅膀.大约在十多年前, 当大规模数学规划方法的实施仍面临一系列 问题时, 在过程设计领域中一种新引入的概念方法一专家系统以及 由此而引申的人工智能方法在解决实际问题上表现出的优势, 引起 了人们的关注目前基于知识和规则的智能系统研究取得了很大的进展, 基于经验、工况分析以及逐渐演进方法等的设计过程也越来越多地由计算机完成, 应用知识和经验规则进行过程设计的计算机辅助 系统逐步趋于完善, 特别是针对更加复杂(例如同时考虑环境影响以 及安全性)的大规模过程系统设计问题, 这些方法仍会有很好的应用 前景。 化工生产遍布现代生活的方方面面,涉及生活用品、工业材料、油气能源,不一而足。化工过程是一个由原料到产品的过程,其中包含物质的转化与能量的传递,而节能省材一直是工业生产的目标之一;化学反应需要在特定的反应设备里进行,怎样设计反应器,使其既能满足生产要求又能高效率的利用资源,是化工设计者的设计原则;原料、产物与成品的输送需要管线,适当的管路管道尺寸的选择,管道的成本;产量的设定,产品的销售等这一系列问题都需要最优化选择,而最优化算法从建立模型、求解方法方面使这一系列决策尽可能达到最理想结果,以下将对最优化方法在化工过程各个部分的应用作简要介绍。针对化学工程,最优化方法主要应用领域包括“三传一反”过 最优化方法及其应用 第一章 最优化问题总论 无论做任何一件事,人们总希望以最少的代价取得最大的效益,也就是力求最好,这就是优化问题.最优化就是在一切可能的方案中选择一个最好的方案以达到最优目标的学科.例如,从甲地到乙地有公路、水路、铁路、航空四种走法,如果我们追求的目标是省钱,那么只要比较一下这四种走法的票价,从中选择最便宜的那一种走法就达到目标.这是最简单的最优化问题,实际优化问题一般都比较复杂. 概括地说,凡是追求最优目标的数学问题都属于最优化问题.作为最优化问题,一般要有三个要素:第一是目标;第二是方案;第三是限制条件.而且目标应是方案的“函数”.如果方案与时间无关,则该问题属于静态最优化问题;否则称为动态最优化问题. §1.1 最优化问题数学模型 最简单的最优化问题实际上在高等数学中已遇到,这就是所谓函数极值,我们习惯上又称之为经典极值问题. 例1.1 对边长为a 的正方形铁板,在四个角处剪去相等的正方形以制成方形无盖水槽,问如何剪法使水槽的容积最大? 解 设剪去的正方形边长为x ,由题意易知,与此相应的水槽容积为 x x a x f 2 )2()(-=. 令 0)6)(2()2()2)(2(2)('2 =--=-+--=x a x a x a x x a x f , 得两个驻点: a x a x 6 121== ,. 第一个驻点不合实际,这是因为剪去4个边长为2 a 的正方形相当于将铁板全部剪去.现在来判断第二个驻点是否为极大点. ∵ a x f 824)(''-=, 4)6 (''<-=a a f , ∴ 6 a x = 是极大点. 因此,每个角剪去边长为6 a 的正方形可使所制成的水槽容积最大. 例 1.2 求侧面积为常数)0(62 >a a ,体积最大的长方体体积. 解 设长方体的长、宽、高分别为z y x ,, 体积为v ,则依题意知体积为 xyz z y x f v ==)(,,, 条件为 06)(2)(2 =-++=a xy xz yz z y x ,,?. 由拉格朗日乘数法,考虑函数 )6222()(2 a xy xz yz xyz z y x F -+++=λ,,, 2()02()02()0x y z F yz y z F xz z x F xy x y λλλ'=++='=++='=++=,, , 由题意可知z y x ,, 应是正数,由此0≠λ,将上面三个等式分别乘以z y x ,, 并利用条件2 3a xy zx yz =++,得到 22 22(3)02(3)02(3)0xyz a yz xyz a zx xyz a xy λλλ?+-=?+-=??+-=? ,,. 比较以上三式可得 xy a zx a yz a -=-=-222333, 从而a z y x ===.又侧面积固定的长方体的最大体积客观存在,因此侧面积固定的长方体中以正方 最优化理论与方法心得体会 摘要:最优化方法作为研究各种系统的优化途径及方案,为决策者提供科学决策的依据。该文简单叙述了最优化方法及其处理问题的步骤和在各领域的应用,在一个学期的自学,讨论的课程之后,总结对最优化问题的理解和认识,思考优化理论在现实生活的应用,如何解决实际问题,以及自我学习过程的感想与实践。 关键字:优化;应用;感想 在生产过程、科学实验以及日常生活中,人们总希望用最少的人力、物力、财力和时间去办更多的事,获得最大的效益,在管理学中被看作是生产者的利润最大化和消费者的效用最大化,如果从数学的角度来看就被看作是“最优化问题”。在最优化的研究生教学中我们所说的最优化问题一般是在某些特定的“约束条件”下寻找某个“目标函数”的最大(或最小)值,其解法称为最优化方法。最优化方法(也称做运筹学方法)是近几十年形成的,它主要运用数学方法研究各种系统的优化途径及方案,为决策者提供科学决策的依据。最优化方法的主要研究对象是各种有组织系统的管理问题及其生产经营活动。最优化方法的目的在于针对所研究的系统,求得一个合理运用人力、物力和财力的最佳方案,发挥和提高系统的效能及效益,最终达到系统的最优目标。实践表明,随着科学技术的日益进步和生产经营的日益发展,最优化方法已成为现代管理科学的重要理论基础和不可缺少的方法,被人们广泛地应用到公共管理、经济管理、工程建设、国防等各个领域,发挥着越来越重要的作用。本章将介绍最优化方法的研究对象、特点,以及最优化方法模型的建立和模型的分析、求解、应用。主要是线性规划问题的模型、求解(线性规划问题的单纯形解法)及其应用――运输问题;以及动态规划的模型、求解、应用――资源分配问题。简单点,从数学意义上说从数学意义上说,最优化方法是一种求极值的方法,即在一组约束为等式或不等式的条件下,使系统的目标函数达到极值,即最大值或最小值。从经济意义上说,是在一定的人力、物力和财力资源条件下,使经济效果达到最大(如产值、利润),或者在完成规定的生产或经济任务下,使投入的人力、物力和财力等资源为最少。不同类型的最优化问题可以有不同的最优化方法,即使同一类型的问题也可有多种最优化方法。反之,某些最优化方法可适用于不同类型的模型。最优化问题的求解方法一般可以分成解析法、直接法、数值计算法和其他方法。 ①解析法:这种方法只适用于目标函数和约束条件有明显的解析表达式的情况。求解方法是:先求出最优的必要条件,得到一组方程或不等式,再求解这组方程或不等式,一般是用求导数的方法或变分法求出必要条件,通过必要条件将问题简化,因此也称间接法。②直接法:当目标函数较为复杂或者不能用变量显函数描述时,无法用解析法求必要条件。此时可采用直接搜索的方法经过若干次迭代搜索到最优点。这种方法常常根据经验或通过试验得到所需结果。对于一维搜索(单变量极值问题),主要用消去法或多项式插值法;对于多维搜索问题(多变量极值问题)主要应用爬山法。③数值计算法:这种方法也是一种直接法。它以梯度法为基础,所以是一种解析与数值计算相结合的方法。④其他方法:如网络最优化方法等。 第一章 最优化问题总论 无论做任何一件事,人们总希望以最少的代价取得最大的效益,也就是力求最好,这就是优化问题.最优化就是在一切可能的方案中选择一个最好的方案以达到最优目标的学科.例如,从甲地到乙地有公路、水路、铁路、航空四种走法,如果我们追求的目标是省钱,那么只要比较一下这四种走法的票价,从中选择最便宜的那一种走法就达到目标.这是最简单的最优化问题,实际优化问题一般都比较复杂. 概括地说,凡是追求最优目标的数学问题都属于最优化问题.作为最优化问题,一般要有三个要素:第一是目标;第二是方案;第三是限制条件.而且目标应是方案的“函数”.如果方案与时间无关,则该问题属于静态最优化问题;否则称为动态最优化问题. §1.1 最优化问题数学模型 最简单的最优化问题实际上在高等数学中已遇到,这就是所谓函数极值,我们习惯上又称之为经典极值问题. 例1.1 对边长为a 的正方形铁板,在四个角处剪去相等的正方形以制成方形无盖水槽,问如何剪法使水槽的容积最大? 解 设剪去的正方形边长为x ,由题意易知,与此相应的水槽容积为 x x a x f 2)2()(-=. 令 0)6)(2()2()2)(2(2)('2=--=-+--=x a x a x a x x a x f , 得两个驻点: a x a x 61 21== ,. 第一个驻点不合实际,这是因为剪去4个边长为2a 的正方形相当于将铁板全部剪去.现 在来判断第二个驻点是否为极大点. ∵ a x f 824)(''-=, 0 4)6(''<-=a a f , ∴ 6a x = 是极大点. 因此,每个角剪去边长为6a 的正方形可使所制成的水槽容积最大. 例1.2 求侧面积为常数 )0(62>a a ,体积最大的长方体体积. 解 设长方体的长、宽、高分别为z y x ,, 体积为v ,则依题意知体积为 xyz z y x f v ==)(,,, 条件为 06)(2)(2=-++=a xy xz yz z y x ,,?. 由拉格朗日乘数法,考虑函数 )6222()(2a xy xz yz xyz z y x F -+++=λ,,, 1 2 ( ( ? 1.一直优化问题的数学模型为: 习题一 min f (x ) = (x ? 3)2 + (x ? 4)2 ? g (x ) = x ? x ? 5 ≥ 0 ? 1 1 2 2 ? 试用图解法求出: s .t . ?g 2 (x ) = ?x 1 ? x 2 + 5 ≥ 0 ?g (x ) = x ≥ 0 ? 3 1 ??g 4 (x ) = x 2 ≥ 0 (1) 无约束最优点,并求出最优值。 (2) 约束最优点,并求出其最优值。 (3) 如果加一个等式约束 h (x ) = x 1 ? x 2 = 0 ,其约束最优解是什么? * 解 :(1)在无约束条件下, f (x ) 的可行域在整个 x 1 0x 2 平面上,不难看出,当 x =(3,4) 时, f (x ) 取最小值,即,最优点为 x * =(3,4):且最优值为: f (x * ) =0 (2)在约束条件下, f (x ) 的可行域为图中阴影部分所示,此时,求该问题的最优点就是 在约束集合即可行域中找一点 (x 1 , x 2 ) ,使其落在半径最小的同心圆上,显然,从图示中可 以看出,当 x * = 15 , 5 ) 时, f (x ) 所在的圆的半径最小。 4 4 ? g (x ) = x ? x ? 5 = 0 ? 15 ?x 1 = 其中:点为 g 1 (x ) 和 g 2 (x ) 的交点,令 ? 1 1 2 ? 2 求解得到: ? 4 5 即最优点为 x * = ??g 2 (x ) = ?x 1 ? x 2 + 5 = 0 15 , 5 ) :最优值为: f (x * ) = 65 ?x = ?? 2 4 4 4 8 (3).若增加一个等式约束,则由图可知,可行域为空集,即此时最优解不存在。 2.一个矩形无盖油箱的外部总面积限定为 S ,怎样设计可使油箱的容量最大?试列出这个优 化问题的数学模型,并回答这属于几维的优化问题. 解:列出这个优化问题的数学模型为: max f (x ) = x 1x 2 x 3 ?x 1x 2 + 2x 2 x 3 + 2x 1x 3 ≤ S ? s .t . ?x 1 > 0 ?x 2 > 0 ??x 3 > 0 该优化问题属于三维的优化问题。 最优化方法 姓名张炯 学号 201200144423 a a a a 图 黄金分割法 一、一维搜索方法的分类 为了每次缩短区间,只需要在区间内再插入一点并计算其函数值。然而,对于插入点的位置,是可以用不同的方法来确定的。 ? 黄金分割法 ? 一类称作解析法或函数逼近法:构造一个插值函数来逼近原来函数,用插值函数的极小点作为区间的插入点 – 牛顿法、二次插值法等 黄金分割法 黄金分割法要求插入点、的位置相对于原区间[a,b]的两端点具有对称性,即 ()()12 b b a a b a a l l a l =--ì??í ?=+-??其中 为待定系数 2 1l l - =10.618 2 l -? = = 黄金分割法的搜索过程 ⑵出初始搜索区间[a,b]及收敛精度,将赋以0.618 ⑵按前页中坐标点比例公式计算α 1和α 2 ,并计算其对应的函数值f(α 1 )和f (α 2 )。 ⑶比较函数值,利用进退法缩短搜索区间 ⑷检查区间是否缩短到足够小和函数值是否收敛到足够近,如果条件不满足则返回到步骤⑵ ⑸如果条件满足则取最后两试验点的平均值作为极小点的数值近似值 黄金分割法程序框图 牛顿法 对于一维搜索函数,假定已给出极小点的一个较好的近似点a0,因为一个连续可微的函数在极小点附近与一个二次函数很接近,所以可以在a0点附近用一个二次函数来逼近函数,即在点a0将f(a)进行泰勒展开,并保留到二次项,有 然后以二次函数的极小点作为极小点的一个新近似点,根据极值必要条件 得 得 牛顿法的计算步骤 ⑴给定初始点a0,控制误差ε,令k=0 ⑵计算f(x)在a k 点的一阶和二阶导数 ⑶利用牛顿法迭代公式求a k+1 ⑷若|a k+1-a k |≤ε,则求得近似解a*=a k+1,停止计算,否则作第⑸步 ⑸令k=k+1,然后转第⑵步 牛顿法的优缺点 最大优点是收敛速度快 缺点 每一点处都要计算函数的导数和二阶导数,因而增加了每次迭代的工作量 用数值微分代替二阶导数时,舍入误差会影响牛顿法的收敛速度,当二阶导数很小时问题更严重 牛顿法要求初始点选得比较好,即不能离极小点太远,否则在可能使极小化序列发散或收敛到非极小点 1()0a f ¢=()()()00100f a f a a a ⅱ ?+-=() ()0100f a a a f a ¢=-ⅱ五种最优化方法
最优化方法及其应用 - 更多gbj149 相关pdf电子书下载
最优化方法及应用
《最优化方法与应用》实验指导书
最优化方法及其Matlab程序设计
最优化方法及其应用课后答案
最优化求解法在实际问题中的应用
最优化方法在计算机专业的应用
最优化方法在化学工程中到的应用
最优化方法及其应用
最优化理论与方法心得体会
最优化方法及其应用
最优化方法及其应用郭科课后答案+复习资料
最优化方法的应用讲解
相关主题
文本预览