§8—4 CCD图象传感器的应用
一.CCD的七个应用领域
1.小型化黑白、彩色TV摄像机
这是面阵CCD应用最广泛的领域。
日本松下CDT型超小型CCD彩色摄像机,直径17mm,长48 mm,使用超小型镜头,重量54g,深受欢迎。典型TV用IS尺寸:7×9 mm2,480×380像元。
2.传真通讯系统
用1024~2048像元的线阵CCD作传真机,可在不到一秒钟内完成A4开稿件的扫描。
3.光学字符识别
IS代替人眼,把字符变成电信号,进行数字化,然后用计算机识别。
重庆大学1985年的CD-1型OCR机,识别率达99.9﹪。
4.广播TV
用SSIS(Solid State Imaging Sensor固态图象传感器)代替光导摄像管。
1986年柯达公司已推出140万素的IS,尺寸7×9 mm2,
比电视图象信号多4倍以上。
5.工业检测与自动控制
这是IS应用量很大的一个领域,统称机器视觉应用。
①.在钢铁、木材、纺织、粮食、医药、机械等领域作零件尺寸的动
态检测,产品质量、包装、形状识别、表面缺陷或粗糙度检测。
②.在自动控制方面,主要作计算机获取被控信息的手段。
③.还可作机器人视觉传感器。
6.可用于各种标本分析(如血细胞分析仪),眼球运动检测,X射线摄像,胃镜、肠镜摄像等。
7.天文观测
①.天文摄像观测
②.从卫星遥感地面
如:美国用5个2048位CCD拼接成10240位长取代125mm
宽侦察胶卷,作地球卫星传感器。
③.航空遥感、卫星侦察
如:1985年欧洲空间局首次在SPOT卫星上使用大型线阵CCD 扫描,地面分辨率提高到10m。
还在军事上应用:微光夜视、导弹制导、目标跟踪、军用图象通信等。
二.尺寸测量
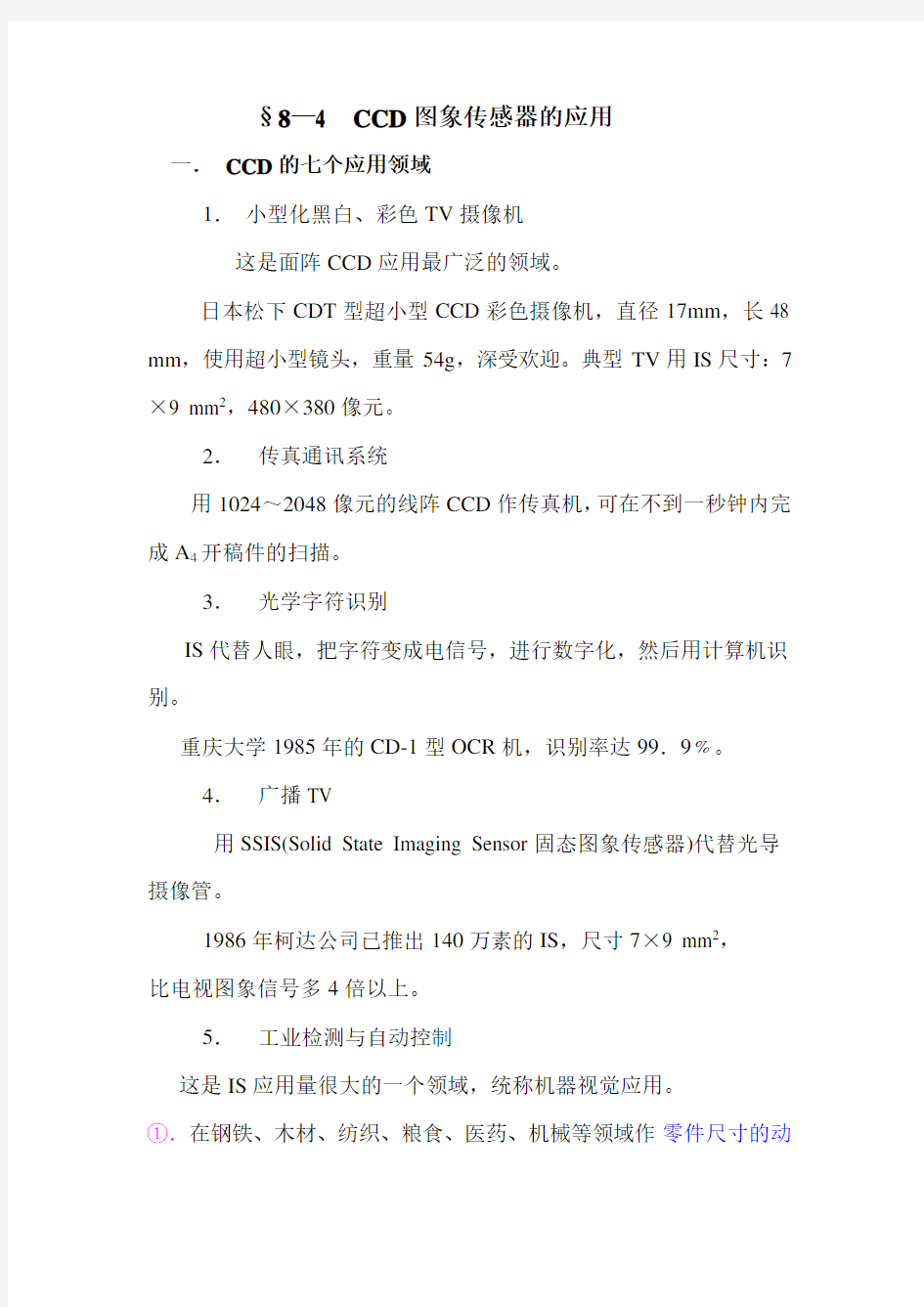
1.微小尺寸的检测(10~500μm)
(一)原理
用衍射的方法对细丝、狭缝、微小位移、微小孔等进行测量。 原理: 当满足远场条件L ﹥﹥d 2/λ时,根据夫琅和费衍射公式可得到
d=K λ/Sin θ (1)
式中:d ——细丝直径;K ——暗纹周期K=±1,2,3…;λ——激光波长;
L ——被测细丝到IS 光敏面的距离;
θ——被测细丝到第K 级暗纹的连线,与光线主轴的夹角;
当θ很小时(即L 足够大时)Sin θ≈tg θ= X k /L 代入(1)式得 d=
K X L K λ=K X L K /λ=S
L
λ …………..(2) S ——暗纹周期,S=X K /K 是相等的,则测细丝直径d 转化为用CCD 测S 误差分析:
S S
L
L S
S
L d ?+
?+?=?2
λλλ
由于激光波长误差λ?很小﹙<10—5λ=,可忽略不计,则
S S L
L S
d ?+
?=
?2
λλ
(或者用随机误差的形式合成)
例:He-Ne 激光λ=632.8nm, L=1000mm ±0.5mm, d=500μm,
则根椐(2)式: S= S
L
λ=3
23
61010510108.632--???? =1.265 (mm ) 当CCD 像元选用13±1μm ,则ΔS=m μ10)1(1002=±? 测量误差 S S
L
L S
d ?+
?=?2
λλ
=)(S S
L
L S
?+?λ
=
)265
.1101010005.026511086323
6--??+?(。。 =4.2m μ
丝越细,测量精度越高(d 越小S 越大),甚至可达到Δd=10-2μm. (二)S 的测量方法
图象传感器IS 输出的视频信号经放大器A 放大,再经峰值保持
电路PH 和采样保持电路S/H 处理,变成箱形波,送到A /D 转换器
进行逐位A/D 转换,最后读入计算机内进行数据处理。判断并确定两暗纹之间的像元数n s ,则暗纹周期S=n s ·p (p 为图象传感器的像元
激光测微装置电路框图
2. 小尺寸的检测
小尺寸的检测是指待测物体可与光电器件尺寸相比拟的场合。
L=
β
p
n ?=(
'
f a
+1)·np
式中: f `
__
—透镜焦距 a ——物距
b ——像距 β——放大倍率 n ——像元数 p ——像元间距 【解释:
'1
11f
b a =- (成像公式) ……(1) L np
a b =
=
β ……(2) 《应光》P 36 解得: L=βp n ?=('
f a
+1)·np
】
(二) 信号处理
光电IS 中被物体遮住和受到光照部分的光敏单元输出有着显著区别,可以把它们的输出看成“0”、“1”信号。通过对输出为“0”的信号进行计数,即可测出物体的宽度。这就是信号的二值化处理。
实际应用时,物像边缘明暗交界处,实际光强是连续变化的,而不是理想的阶跃跳变,要解决这一问题可用两种方法:①比较整形法;或者 ②微分法。
① 比较整形法:(即域值法)
计数脉冲
a. 固定域值法
固定域值法是将CCD 输出的视频信号送入电压比较器的同相
输入端,比较器的反相输入端加上可调的电平就构成了固定域值二值化电路。当CCD 视频信号电压的幅度稍稍大于域值电压(电压比较器的反相输入端电压)时,电压比较器输出为高电平(为数字信号
在低电平期间对计数脉冲进行计数,从而得np
。
“1”);当CCD视频信号小于等于域值电压时,电压比较器输出为低电平(为数字信号“0”)。CCD视频信号经电压比较器后输出的是二值化方波信号。
调节域值电压,方波脉冲的前、后沿将发生移动,脉冲宽度发生变化。当CCD视频信号输出含有被测物体直径的信息时,可以通过适当调节域值电压获得方波脉冲宽度与被测物体直径的精确关系。这种方法常用于CCD测径仪中。
固定域值法要求域值电压稳定,光源稳定,驱动脉冲稳定,对系统提出较高要求。浮动域值法可以克服这些缺点。
b.浮动域值法
浮动域值法是使电压比较器的域值电压随测量系统的光源或随CCD输出视频信号的幅值浮动。这样,当光源强度变化引起CCD输出视频信号起伏变化时,可以通过电路将光源起伏或CCD视频信号的变化反馈到域值上,使域值电位跟着变化,从而使方波脉冲宽度基本不变。
②微分法
因为被测对象边沿处,输出脉冲的幅度具有最大变化斜率,因此,若对低通滤波信号进行微分处理,则得到的微分脉冲峰值点座标即为物象的边沿点。
用这两个微分脉冲峰值点作为计数器的控制信号,在两个峰值点间对计数脉冲计数,即可测出物体宽度。
滤波后
CCD
微分I 绝对值
微分II 过零触发二值化信号t
t t
将CCD视频输出的调幅脉冲信号经采样保持电路或低通滤波后变成连续的视频信号(第一条波形);将连续的视频信号信经过微分电路I微分,它的输出是视频信号的变化率,信号电压的最大值对应于视频信号边界过渡区变化率最大的点(A点、A`点)。在视频信号的下降沿产生一个负脉冲,在上升沿产生一个正脉冲(第二条波形);将微分I输出的两个极性相反的脉冲信号送给取绝对值电路,经该电路将微分I输出的信号变成同极性的脉冲信号(第三条波形),信号的幅值点对应于边界特征点;将同极性的脉冲信号送入微分电路II再次微分获得对应绝对值最大处的过零信号(第四条波形);过零信号再经过零触发器,输出两个下降边沿对应于过零点的脉冲信号(第五条波形);用这两个信号的下降沿去触发一个触发器,便可获得视频信号起始和终止边界特征的方波脉冲,及二值化信号(第六条波形)。其脉冲宽度为图象AA`间的宽度。
这套方法可由硬件电路完成,也可由数字信号处理方法软件完成(数字信号处理:CCD直接进行A/D同步采样,再用计算机对数字处理。省去了滤波及以后的环节)。
㈢例子:钢珠直径,小轴承内外径,
小轴径、孔径,
小玻璃管直径,
微小位移测量,
机械振动测量。
3.大尺寸检测(或高精度工件检测)
对于大尺寸工件或测量精度要求高的工件,可采用“双眼”系统检测物体的两个边沿视场。这样,可用较低位数的传感器,达到较高的测量精度。
无误差位置
原理如下:
np
L L(或L X)=
单个像元代表的实际尺寸L L/np=1/β,当L L很大时,成缩小的像(β<1=,且L L越大,则每个像元代表的实际尺寸也越大,精度就差。分辩率R=P/β(P为像元中心距),L L(或L X)=nR。
缩狭视场(只测L L和L X),可提高β,增大分辩率R,提高精度。
考虑钢板水平偏转θ,用CCD3测出b,
θ=arctg(b/a)
钢板宽度:
L=(L0+L L+L X)cosθ
例:若L=1700mm,θ=50,
求:不考虑角度误差θ时的测量误差。
解:C=L/ cosθ=1700/ cos50=1706.49mm
则ΔL=C-L=6.49 mm
可见不考虑角度误差是不能准确测量的。
例:若ΔL=1 mm,则cosθ=L/(L+ΔL)=1700/1701
θ=1.960
三.工件表面质量检测 (粗糙度、伤痕、污垢) 1.CCD 采集系统原理
工件粗糙度是它的微观不平度的表现,各种等级的粗糙度对光源的反射强度是不同的,根据这种差别,可用计算机处理得到粗糙度的等级。
伤痕或污垢表现为工件表面的局部与其周围的CCD 输出幅值具有差别。采用面阵CCD 采样利用计算机进行图象处理可得到伤痕或污垢的大小。
以上方法偏重软件,把比较、校正、显示等硬件环节给省去了。
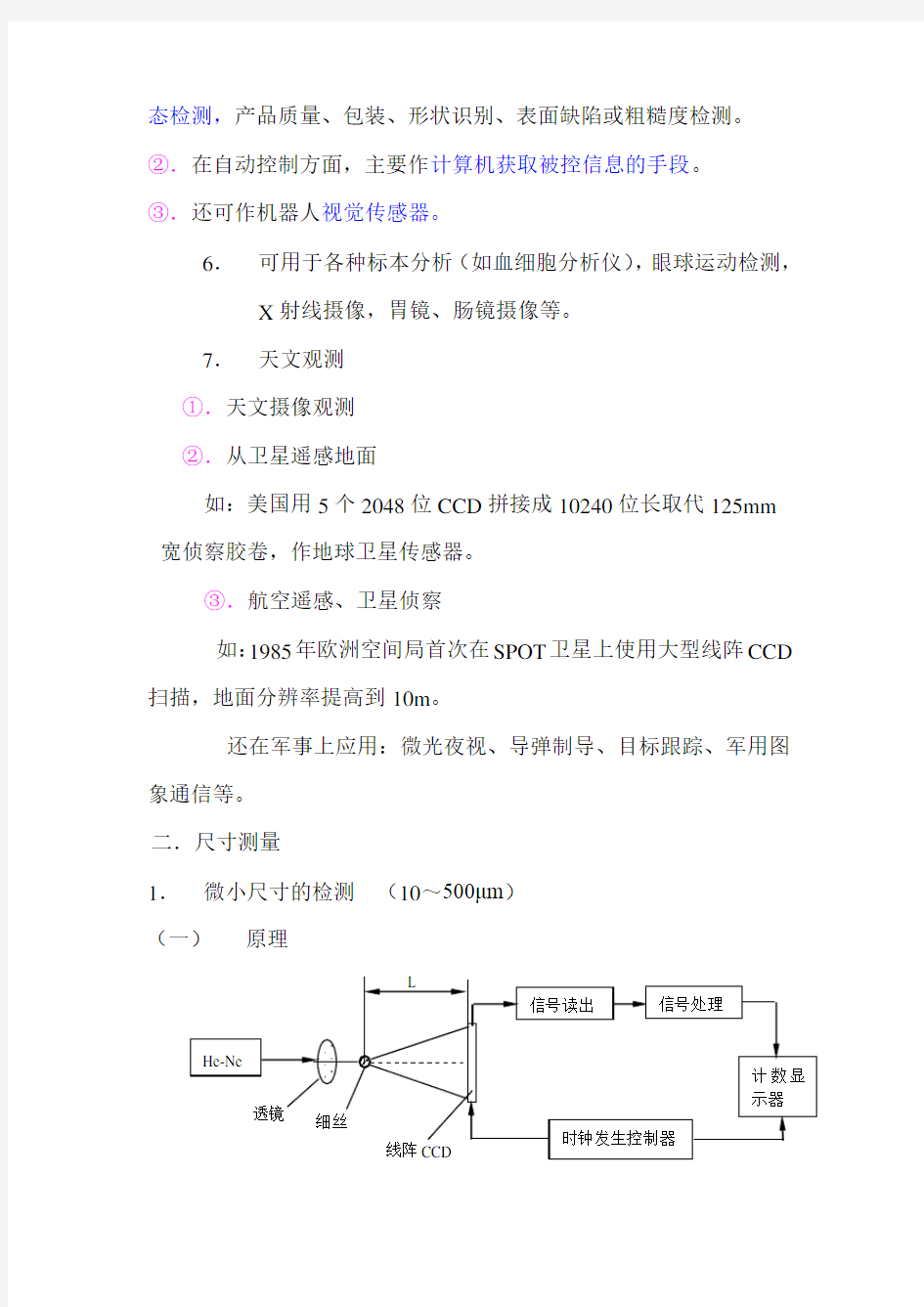
2.
H
CCD
测量方法:
工件粗糙度(轮廓最大高度R Y )实际峰谷高由H 计算:
H=SS ’
cos450
= 2
'SS
=
2
βh
β为物镜放大率
用CCD 测得h, 可得粗糙度H 。
相当于粗糙度 即H=0。05μm ,
若
CCD 象元尺寸=15μm=h 则物镜倍率 β
=2
H h =
2
05.015=212.2
CCD 视场
’
R Y 磨
纹理方向
CCD图像传感器 CCD(Charge Coupled Device)全称为电荷耦合器件,是70年代发展起来的新型半导体器件。它是在MOS集成电路技术基础上发展起来的,为半导体技术应用开拓了新的领域。它具有光电转换、信息存贮和传输等功能,具有集成度高、功耗小、结构简单、寿命长、性能稳定等优点,故在固体图像传感器、信息存贮和处理等方面得到了广泛的应用。CCD图像传感器能实现信息的获取、转换和视觉功能的扩展,能给出直观、真实、多层次的内容丰富的可视图像信息,被广泛应用于军事、天文、医疗、广播、电视、传真通信以及工业检测和自动控制系统。实验室用的数码相机、光学多道分析器等仪器,都用了CCD 作图象探测元件。 一个完整的CCD器件由光敏单元、转移栅、移位寄存器及一些辅助输入、输出电路组成。CCD工作时,在设定的积分时间内由光敏单元对光信号进行取样,将光的强弱转换为各光敏单元的电荷多少。取样结束后各光敏元电荷由转移栅转移到移位寄存器的相应单元中。移位寄存器在驱动时钟的作用下,将信号电荷顺次转移到输出端。将输出信号接到示波器、图象显示器或其它信号存储、处理设备中,就可对信号再现或进行存储处理。由于CCD光敏元可做得很小(约10um),所以它的图象分辨率很高。 一.CCD的MOS结构及存贮电荷原理 CCD的基本单元是MOS电容器,这种电容器能存贮电荷,其结构如图1所示。以P型硅为例,在P型硅衬底上通过氧化在表面形成SiO2层,然后在SiO2上淀积一层金属为栅极,P型硅里的多数载流子是带正电荷的空穴,少数载流子是带负电荷的电子,当金属电极上施加正电压时,其电场能够透过SiO2绝缘层对这些载流子进行排斥或吸引。于是带正电的空穴被排斥到远离电极处,剩下的带负电的少数载流子在紧靠SiO2层形成负电荷层(耗尽层),电子一旦进入由于电场作用就不能复出,故又称为电子势阱。 当器件受到光照时(光可从各电极的缝隙间经过SiO2层射入,或经衬底的薄P型硅射入),光子的能量被半导体吸收,产生电子-空穴对,这时出现的电子被吸引存贮在势阱中,这些电子是可以传导的。光越强,势阱中收集的电子越多,光弱则反之,这样就把光的强弱变成电荷的数量,实现了光与电的转换,而势阱中收集的电子处于存贮状态,即使停止光照一定时间内也不会损失,这就实现了对光照的记忆。
CCD(Charged Coupled Device)于1969年在贝尔试验室研制成功,之后由日商等公司开始量产,其发展历程已经将近30多年,从初期的10多万像素已经发展至目前主流应用的500万像素。CCD又可分为线型(Linear)与面型(Area)两种,其中线型应用于影像扫瞄器及传真机上,而面型主要应用于数码相机(DSC)、摄录影机、监视摄影机等多项影像输入产品上。 一般认为,CCD图像传感器有以下优点: 1. 高解析度(High Resolution):像点的大小为μm级,可感测及识别精细物体,提高影像品质。从早期1寸、1/2寸、2/3寸、1/4寸到最近推出的1/9寸,像素数目从初期的10多万增加到现在的400~500万像素; 2. 低杂讯(Low Noise)高敏感度:CCD具有很低的读出杂讯和暗电流杂讯,因此提高了信噪比(SNR),同时又具高敏感度,很低光度的入射光也能侦测到,其讯号不会被掩盖,使CCD的应用较不受天候拘束; 3. 动态范围广(High Dynamic Range):同时侦测及分办强光和弱光,提高系统环境的使用范围,不因亮度差异大而造成信号反差现象。 4. 良好的线性特性曲线(Linearity):入射光源强度和输出讯号大小成良好的正比关系,物体资讯不致损失,降低信号补偿处理成本; 高光子转换效率(High Quantum Efficiency ):很微弱的入射光照射都能被记录下来,若配合影像增强管及投光器,即使在暗夜远处的景物仍然还可以侦测得到; 5. 大面积感光(Large Field of View):利用半导体技术已可制造大面积的CCDD晶片,目前与传统底片尺寸相当的35mm的CCD已经开始应用在数码相机中,成为取代专业有利光学相机的关键元件; 光谱响应广(Broad Spectral Response):能检测很宽波长范围的光,增加系统使用弹性,扩大系统应用领域; 6. 低影像失真(Low Image Distortion):使用CCD感测器,其影像处理不会有失真的情形,使原物体资讯忠实地反应出来; 7. 体积小、重量轻:CCD具备体积小且重量轻的特性,因此,可容易地装置在人造卫星及各式导航系统上; 8. 低秏电力,不受强电磁场影响;
CCD图像传感器的特性一般包括光谱特性、分辨率、暗电流、灵敏度和动态范围等。 1、光谱特性 CCD图像传感器具有很宽的感光光谱范围,其感光光谱可延伸至红外区域,利用此特性,可以在夜间无可见光照明的情况下,用辅助红外光源照明,也能使CCD图像传感器清晰地成像。光波的波长范围从几纳米到1 mm,即10-9 ~10-3m,而人眼的感光范围只在0.38~0.78 μm的范围。CCD器件的光谱响应范围宽于人眼的视觉范围,一般在0.2~1.1μm的波长范围内。特种材料的红外CCD 的波长响应可扩展到几微米,即CCD 的光谱响应范围从远紫外,近紫外,可见光到近红外区,甚至到中红外区。2、分辨率 分辨率是CCD的最重要的特性,一般用器件的MTF(Modulation Transfer Function)即调制转移函数来表示。需要说明的是,CCD芯片的分辨率与后面提到的CCD摄像机的分辨率的定义是不同的。3、暗电流 暗电流产生的主要原因在于CCD器件本身的缺陷,而且这种器件本身还使得暗电流的产生也不均匀;暗电流限制了器件的灵敏度和动态范围;暗电流的大小与温度的关系极为密切,温度每降低100C,暗电流约减少一半。 4、灵敏度和动态范围 CCD的灵敏度一般用最低照度表示,所谓灵敏度高就是要求在很低的照度下也能输出较为清晰(轮廓)的图像。动态范围是势阱中可存储的最大电荷量和噪声决定的最小电荷量之比。CCD势阱中可容纳的最大信号电荷量取决于CCD电极面积及器件结构,时钟驱动方式及驱动脉冲电压的幅度等因素。
5、弥散现象(Blooming) 由于CCD势阱对光信号电荷的收容能力有一定的限度,所以,当高照度光局部地照射CCD单元时,电荷量将从势阱溢出,并流入邻近势阱,光产生的图像就会失真,这就是弥散现象。 6、噪声 CCD的噪声源主要有以下几种:电荷注入器件产生的噪声;电荷转移时,电荷量波动产生的噪声;电荷读出时的噪声。
CMOS/CCD图像传感器的工作原理 虽是老声常谈,不过对于我这样的非专业人士来讲,还是要时常温习下一些基本概念的,虽然早先系统比较过 coms 和ccd ,但时间久了某些细节问题还是不能及时脱口而出。特zz一篇,写的不错。具体构造方面的细节比较,还得自己查书了。因最近正在用sony的HDV-Hc1,用的是cmos感光元件,现在的cmos产品越来越多了,前景大好。 无论是CCD还是CMOS,它们都采用感光元件作为影像捕获的基本手段,CCD/CMOS感光元件的核心都是一个感光二极管(photodiode),该二极管在接受光线照射之后能够产生输出电流,而电流的强度则与光照的强度对应。但在周边组成上,CCD的感光元件与CMOS的感光元件并不相同,前者的感光元件除了感光二极管之外,包括一个用于控制相邻电荷的存储单元,感光二极管占据了绝大多数面积—换一种说法就是,CCD 感光元件中的有效感光面积较大,在同等条件下可接收到较强的光信号,对应的输出电信号也更明晰。而CMOS感光元件的构成就比较复杂,除处于核心地位的感光二极管之外,它还包括放大器与模数转换电路,每个像点的构成为一个感光二极管和三颗晶体管,而感光二极管占据的面积只是整个元件的一小部分,造成CMOS传感器的开口率远低于CCD (开口率:有效感光区域与整个感光元件的面积比值);这样在接受同等光照及元件大小相同的情况下,CMOS感光元件所能捕捉到的光信号就明显小于CCD元件,灵敏度较低;体现在输出结果上,就是CMOS传感器捕捉到的图像内容不如CCD传感器来得丰富,图像细节丢失情况严重且噪声明显,这也是早期CMOS 传感器只能用于低端场合的一大原因。CMOS开口率低造成的另一个麻烦在于,它的像素点密度无法做到媲美CCD的地步,因为随着密度的提高,感光元件的比重面积将因此缩小,而CMOS开口率太低,有效感光区域小得可怜,图像细节丢失情况会愈为严重。因此在传感器尺寸相同的前提下,CCD的像素规模总是高于同时期的CMOS传感器,这也是CMOS长期以来都未能进入主流数码相机市场的重要原因之一。每个感光元件对应图像传感器中的一个像点,由于感光元件只能感应光的强度,无法捕获色彩信息,因此必须在感光元件上方覆盖彩色滤光片。在这方面,不同的传感器厂商有不同的解决方案,最常用的做法是覆盖RGB红绿蓝三色滤光片,以1:2:1的构成由四个像点构成一个彩色像素(即红蓝滤光片分别覆盖一个像点,剩下的两个像点都覆盖绿色滤光片),采取这种比例的原因是人眼对绿色较为敏感。而