NM7000B ILS的校飞程序
一、调节前期准备
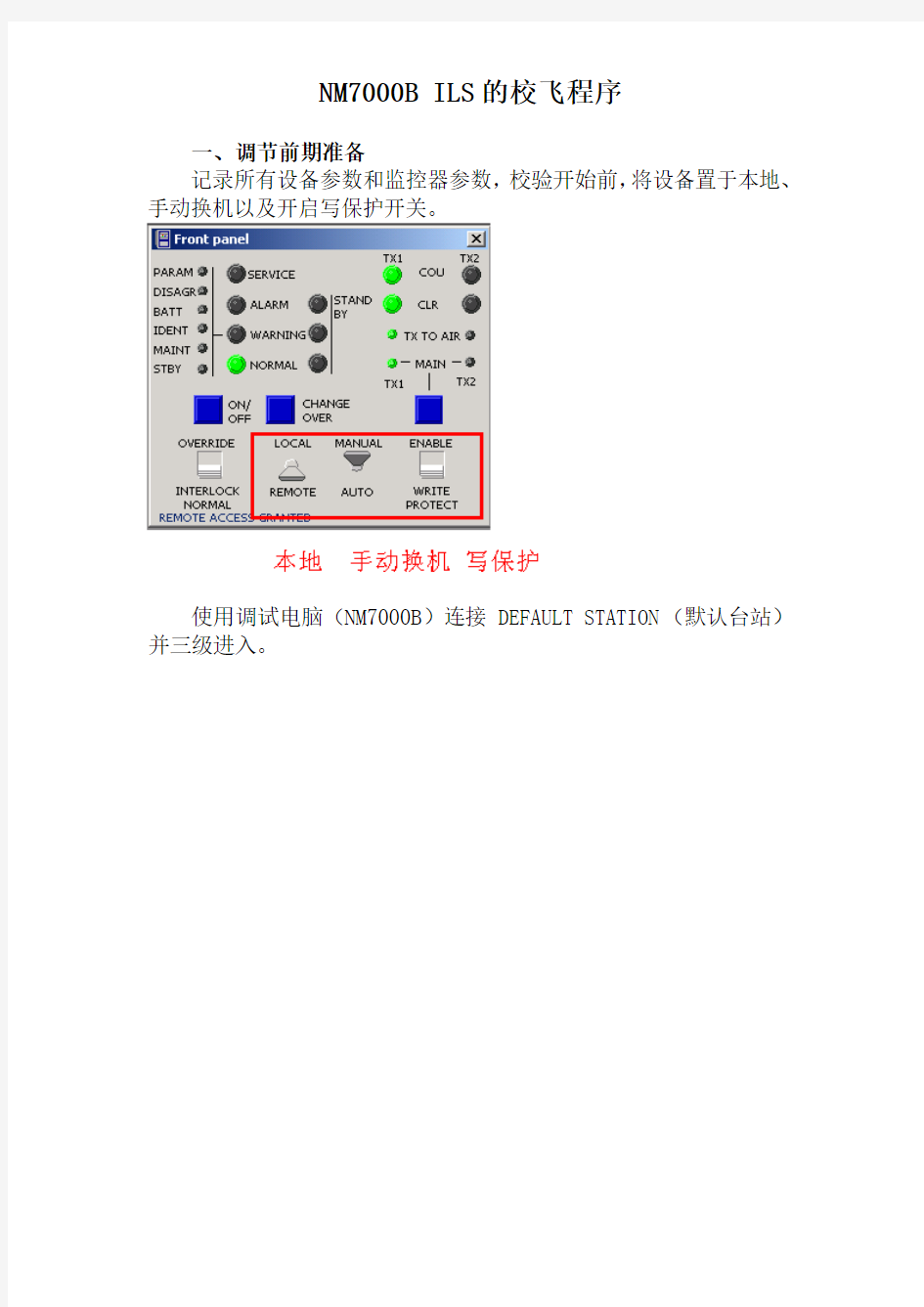
记录所有设备参数和监控器参数,校验开始前,将设备置于本地、手动换机以及开启写保护开关。
使用调试电脑(NM7000B)连接DEFAULT STATION(默认台站)并三级进入。
二、校飞的调试LLZ
(一)、调制度和(SDM)调节
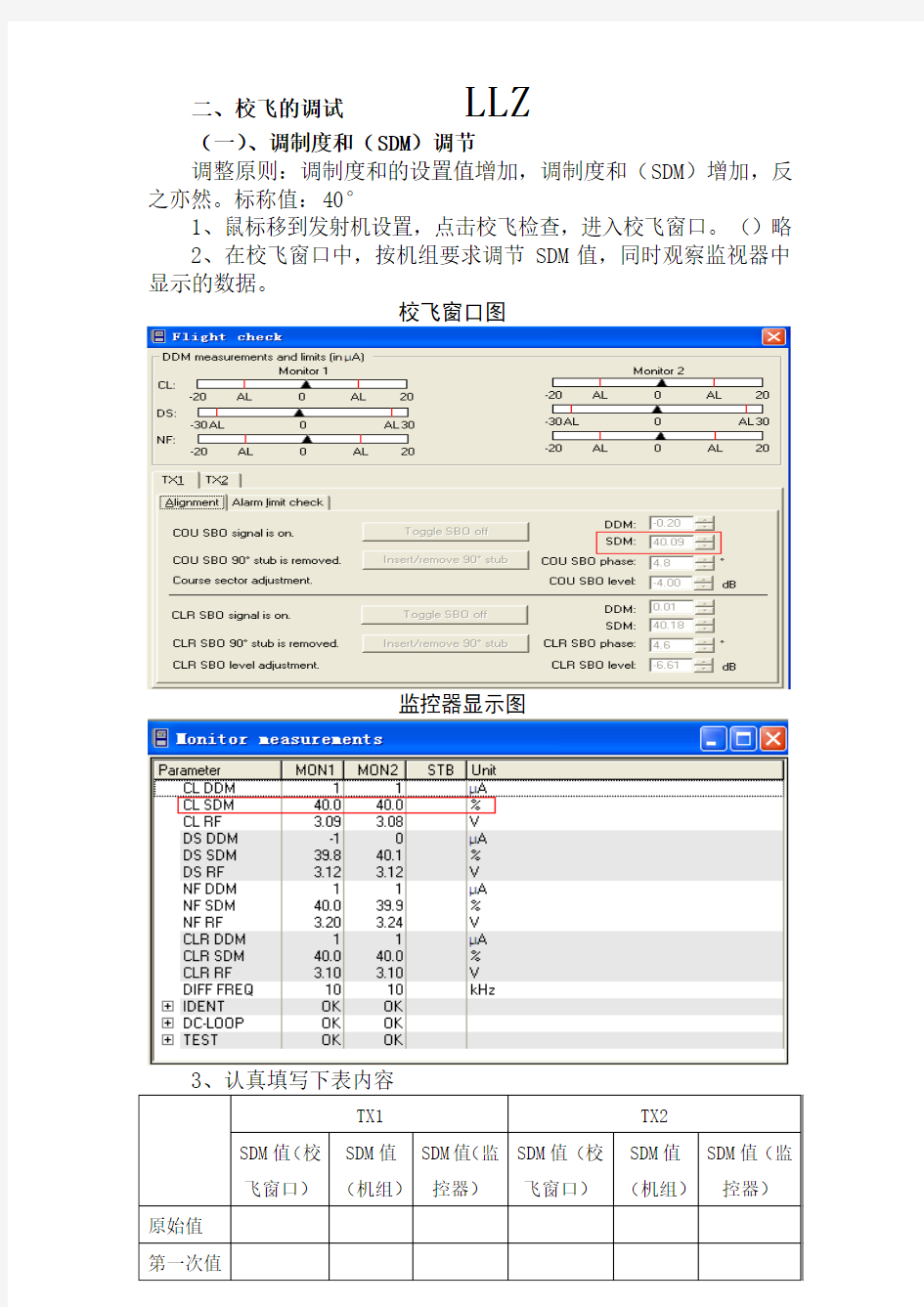
调整原则:调制度和的设置值增加,调制度和(SDM)增加,反之亦然。标称值:40°
1、鼠标移到发射机设置,点击校飞检查,进入校飞窗口。()略
2、在校飞窗口中,按机组要求调节SDM值,同时观察监视器中显示的数据。
校飞窗口图
监控器显示图
(二)、校直的调节
调整原则:若机组报偏左,则要加大90Hz 或减小150Hz ,使DDM 向负方向变化;若机组报偏右,则要加大150Hz 或减小90Hz ,使DDM 向正方向变化。1u A=0.1%DDM=0.01度 。标称值:000
例如:偏左2uA ,使校飞窗口DDM 值改变0.2。注意向负方向变化,即加大90HZ 。在监控器上观察CL DDM 的数值变化了2uA ,达到调节的目的。
1、鼠标移到发射机设置,点击校飞检查,进入校飞窗口。
发射机设置图
如右图所示:
一、在左边90HZ 占优,提示飞机向右飞。 二、在右边150HZ 占优,提示飞机向左飞。 三、在跑道中心延长90HZ 和150HZ 的调制度相等,即DDM=00。
2、在校飞窗口中,按机组要求调节DDM值,同时观察监视器中显示的数据。
校飞窗口图
监控器显示图
3、认真填写下表内容
(三)、宽度的调节
调整原则: 增加宽度,增大SBO绝对值;减小宽度,减小SBO绝对值。
ΔdB=20lgω1/ω0ω1----机组报告需要达到的值。ω0 ----机组报告的初始值。
标称值:4.63°
例如:从4.83°调节到4.63°
1、公式法:ω1 =4.63 ω0 =4.83 则ΔdB=20lg4.63/4.83=0.4237
需调整SBO电平值(COU SBO level)为dB=-︱4.00-0.42︱=-3.58,即减小SBO绝对值就减小宽度。(4.00是校验窗口COU SBO level值)
2、转换关系:按1uA=0.1%DDM=0.01°的转换关系,从4.83度调节到4.63度,需要改变0.20度,即改变20uA左右。在监视器上观察DS DDM的数值变化了20uA,达到调节的目的。
一般检查宽度的时候飞行员不会要求对其进行调节,直到完成宽度告警的调节后,飞行员才会要求将宽度恢复为某一个数值。在测试宽度的时候,飞机所给出的宽度与前一次校飞得到的宽度进行比较,可以知道目前的宽度比原来大还是小,由此得到在后边的宽度告警的调节中,SBO电平值需要比上一次的经验值调节得更大还是更小。
航向天线到跑道端的距
米
的
=1.55
1、鼠标移到发射机设置,点击校飞检查,进入校飞窗口。
发射机设置图
宽度的飞行方法:
2、在校飞窗口中,按机组要求调节SBO值,同时观察监视器中显示的数据。
校飞窗口图
监控器显示图
3、认真填写下表内容
调整原则: 增加宽度,增大SBO 绝对值; 减小宽度,减小SBO 绝对值。
ΔdB=20lg ω1/ω0 ω1----机组报告需要达到的值。ω0 ----机组报告的初始值。
标称值:5.57°(17
.0163
.457.5-=
) 1、鼠标移到发射机设置,点击校飞检查,进入校飞窗口。(略) 2、在校飞窗口中,按机组要求点击WIDE 前面小孔,并输入计算值,同时观察监视器中显示的数据。
校飞窗口图
监控器显示图
3、认真填写下表内容(没有飞)
(五)、窄告警的调节
调整原则: 增加宽度,增大SBO 绝对值; 减小宽度,减小SBO 绝对值。
ΔdB=20lg ω1/ω0 ω1----机组报告需要达到的值。ω0 ----机组报告的初始值。
标称值:3.95°(17
.0163
.495.3+=
) 1、鼠标移到发射机设置,点击校飞检查,进入校飞窗口。(略) 2、在校飞窗口中,按机组要求点击NARROW 前面小孔,并输入计算值,同时观察监视器中显示的数据。
校飞窗口图
监控器显示图
(六)、校直告警
校值告警值:DDM=10.5×0.00145=0.015,即15 uA。
1、鼠标移到发射机设置,点击校飞检查,进入校飞窗口。(略)
2、在校飞窗口中,按机组要求点击CL TEST SIGNAL 1(90HZ占优);点击CL TEST SIGNAL 2(150HZ占优)。并输入计算值,同时观察监视器中显示的数据。
校飞窗口图
监控器显示图
3、认真填写下表内容
GP
(一)、调制度和(SDM)调节
调整原则:调制度和的设置值增加,调制度和(SDM)增加,反之亦然。标称值:80°
1、鼠标移到发射机设置,点击校飞检查,进入校飞窗口。(略)
2、在校飞窗口中,按机组要求调节SDM值,同时观察监视器中显示的数据。
校飞窗口图
监控器显示图
3、认真填写下表内容
调整原则:若机组报偏高,则要加大90Hz 或减小150Hz ,使DDM 向负方向变化;若机组报偏低,则要加大150Hz 或减小90Hz ,使DDM 向正方向变化。1u A=0.1%DDM=0.01度 。标称值:000
例如:从3.45度调节到3.5度,需要改变0.05度,即改变5uA 左右。注意向正方向变化,即加大150HZ 。在监视器上观察CL DDM 的数值变化了5uA ,达到调节的目的。
1、鼠标移到发射机设置,点击校飞检查,进入校飞窗口。
发射机设置图
如右图所示:
一、在上边90HZ 占优,提示飞机向下飞。 二、在下边150HZ 占优,提示飞机向上飞。 三、在下滑角上90HZ 和150HZ 的调制度相等,即DDM=00。
2、在校飞窗口中,按机组要求调节DDM值,同时观察监视器中显示的数据。
校飞窗口图
监控器显示图
3、认真填写下表内容
TX1 TX2
DDM值(校飞窗口)DDM值
(机组)
DDM值(监
控器)
DDM值(校
飞窗口)
DDM值
(机组)
DDM值(监
控器)
原始值第一次值第二次值
调整原则: 增加宽度,增大SBO 绝对值; 减小宽度,减小SBO 绝对值。
ΔdB=20lg ω1/ω0 ω1----机组报告需要达到的值。ω0 ----机组报告的初始值。
注意事项参考航向的调节。 标称值:0.84°(2×0.12Q)
1、鼠标移到发射机设置,点击校飞检查,进入校飞窗口。
发射机设置图
宽度的飞行方法: 0.12 Q=8.75%=75 u A
2、在校飞窗口中,按机组要求调节SBO值,同时观察监视器中显示的数据。
校飞窗口图
监控器显示图
3、认真填写下表内容
TX1 TX2
SBO值(校飞窗口)
宽度值
(机组)
DDM值(监
控器)
DDM值(校
飞窗口)
宽度值
(机组)
DDM值(监
控器)
原始值第一次值第二次值第三次值
(四)、宽告警的调节
调整原则: 增加宽度,增大SBO 绝对值; 减小宽度,减小SBO 绝对值。
ΔdB=20lg ω1/ω0 ω1----机组报告需要达到的值。ω0 ----机组报告的初始值。
标称值:1.1°(
17
.0184
.01.1-=
) 1、鼠标移到发射机设置,点击校飞检查,进入校飞窗口。
发射机设置图
2、在校飞窗口中,按机组要求点击WIDE 前面小孔,并输入计算值,同时观察监视器中显示的数据。
校飞窗口图
监控器显示图
3、认真填写下表内容
TX1
TX2
SBO 值(校
飞窗口) 告警值 (机组) DDM 值(监控器)
DDM 值(校
飞窗口) 告警值 (机组) DDM 值(监
控器) 原始值
(五)、校直告警
只做下限告警3.24°(075
.015
.324.3+=
)
根据线性关系,即0.12Q=8.75%=75 u A 的关系(Q=3.5°)计算下限告警3.24°的DDM
DDM=
42
.026
.0%75.8?=5.4% (0.26=3.5-3.24;0.42=0.12?3.5)
1、鼠标移到发射机设置,点击校飞检查,进入校飞窗口。(略)
2、在校飞窗口中,按机组要求点击CL TEST SIGNAL 1(90HZ 占优),并输入计算值,同时观察监视器中显示的数据。
校飞窗口图
监控器显示图
3、认真填写下表内容(没有飞)
填空题 20*2 ■对于51系列单片机,现有4种语言支持程序设计,它们是(汇编语言)、PL/M、(C语言)、BASIC。 ■单片机程序设计时需要在主程序中设计死循环来防止程序跑飞。在C语言中采用(while(1))或for(;;)语句实现死循环。 ■单片机程序设计中经常用到中断,在C语言程序设计中外部中断1的中断入口序号(2),而汇编语言程序设计中外部中断1的入口地址是(0013H)。 ■编写串口中断程序时要在函数说明部分后写interrupt 4 。 ■编写定时器0中断程序时要在函数说明部分后写interrupt 1 。 ■C语言程序设计中有一个无符号形字符变量temp和一个位变量Flag,现在分别对它们取反。相应的语句为temp=__~___temp; Flag=_!___Flag;。 ■I2C总线在传送数据过程中共有三种类型控制信号,它们分别是:_(起始信号)____、应答信号、_(停止信号)_____。 ■I2C的地址由(协议规定)与(硬件设置)两部分组成。 ■I2C器件的两条信号线分别为串行时钟线SCL 与串行数据线 SDA 。 ■MCS-51单片机操作I2C器件时,单片机必须做为主机,I\O编程。 ■在Cx51所有的数据类型中,只有bit 与unsigned char 直接支持机器指令。 ■编译器性能比较有如下几个方面:算数支持、生产代码大小、开打速度、支持浮点和long 。 ■在KEIL开发套件中,BL51链接器/定位器用于创建一个绝对目标横快。 ■Cx51中函数分为两大类:标准库函数和用户自定义函数。 ■在函数名前如果不指定函数类型,则该函数的类型为整型。 ■具有一定格式的数字或数值叫做数据,数据的不同格式叫做数据类型, 数据按一定的数据类型进行的排列、组合及架构称为数据结构。 ■数据类型的转换有自动转换与强制转换两种。 ■直接出现在程序中的数值(如TMOD=0x21)称为常数。在程序运行的过程中,其值不能改变且被定义为符号的(如#define CONST 60)称为常量。 ■软件对常量与变量的命名规范是:常量名用大写字母,变量名用小写字母。 ■MCS-51单片机串口用于中断通讯时,在进行初始化时必须设置的特殊功能寄存器有:
《跳吧!跳吧!》说课稿 各位老师,同学们,你们好。我今天要说课的内容是《跳吧跳吧》,选自苏教版六年级上册第五单元第二课,共一课时。下面,我将从以下几个方面,对《跳吧跳吧》这一课进行详细的说明。 一、说教材 1.教材分析 《跳吧跳吧》是一首热烈欢快的具有舞曲风格的斯洛伐克民歌。 1、歌曲表现了人们在冬日晚宴上,围着火炉,拉起圆圈,快乐地歌舞时的热烈,欢乐情景。歌词内容富裕生活情趣,并带着幽默感,表现了歌舞当中相互娱乐的风趣。 2、歌曲是F大调,2/4拍,共分为两个乐段。第一乐段节奏相似,比较紧凑密集,第二乐段节奏较宽,旋律较为舒展。 3、歌曲的明显特点是:连续切分节奏和曲调多处反复。乐句短小,多处重音,使节奏更加鲜明突出,给人以强烈的动感,适合舞蹈动作。 二、说教学目标 (1)知识目标 了解波尔卡舞曲的形式及其特点,感受音乐与舞蹈之间的必然联系。 (2)能力目标 引导学生在律动中感受歌曲《跳吧!跳吧!》的节奏、旋律、速度、曲式、情绪等特点,在歌唱和律动中尽情享受生活的快乐,音乐的美好。 (3)情感目标 能用热烈、欢快的情绪和轻快有力的声音演唱歌曲。 三、说教学重点、难点 1、按节拍、按情绪唱好这首歌曲。 2、能正确的感受歌曲的风格特点并表现歌曲。 四、说教法学法. 法国著名艺术家罗丹曾说过:“对于我们的眼睛,不是缺少美,而是缺少发现。”许多美学家认为,音乐是最富有情感的艺术,同时又是最讲究形式结构的艺术。所以我想,通过以下的设计,让学生在音乐中认识美,在生活中寻找美,在未来
里创造美,让美融入每一个孩子的心里。 具体做法有: 1.创设情境:苏霍姆林斯基说过:“儿童是以色彩、形象、声音来思维的。”针对这一特点,我通过电子设备,和有感情的语言来为学生创设出一个生动可联想的音乐环境,充分调动学生的学习兴趣,激发学生对音乐的好奇心、探究心。 2.合作学习:新课程提出自主、合作、探究的学习方式,所以在学唱歌这一环节时,我充分渗透这一教学理念。通过师生合作、生生合作如接唱等。这一学习方法不仅为学生创设了宽松、民主。自由的氛围,更能激发学生的创新思维,增强学生学习的信心。通过合作,学生的合作意识和在群体中的协作能力得到发展。 3.积极评价:音乐课程标准指出:评价有利于学生了解自己的进步,发现、发展音乐潜能。建立自信,促进音乐感知,有利于学生表现力创造力的发展。所以在整个教学过程中,我都会用眼神、笑容、言语等即时给予学生适时的鼓励。 4.角色扮演:心理学和教育学研究表明:“爱动”是儿童的天性。在学习生活中,儿童总是喜欢亲眼看一看、亲耳听一听、亲手试一试。因此,在教学过程中,我设计了学习波尔卡舞蹈,并会请学生上前表演,给学生设置了一个展示自我的舞台。 五、说教学过程 (写在黑板上)总的设计思路为:1、组织教学、情境导入 2、实践体验、学唱歌曲 3、启发诱导、对比欣赏 、创设舞台、展示自我4(一)、组织教学、情境导入 俗话说的好“良好的开端是成功的一半”。因此我首先使用《跳吧跳吧》作 为背景音乐,让学生在《跳吧跳吧》的伴奏音乐声中可自己创编动作,律动着走进音乐教室。其后,我会先展示出斯洛伐克的城堡、圣马丁大教堂等配有背景音乐的幻灯片,加上生动、神秘的语调吸引学生的注意与兴趣,引出斯洛伐克这个国家。并对其做简单介绍。引出今天的学习内容斯洛伐克民歌《跳吧跳吧》 (二)、实践体验、学唱歌曲此时进入带领学生观看视频,学习波尔 卡舞蹈,吸引出学生的学习兴趣。 (示范)紧接着带领学生学习波尔卡舞蹈:双手插腰,两只脚同时向上起跳,在跳的同时,左腿屈膝上提,接着左脚落地,两只脚踏三下,然后再换右脚做。做这个动作的时候,注意脚步要轻盈,两只脚都是前脚掌着地。 待学生学会后,用《跳吧跳吧》作为背景音乐,与学生一起跳波尔卡舞步。并及时对学生的舞蹈给予表扬鼓励。舞蹈结束后,告诉学生刚刚的舞蹈背景音乐是一首斯洛伐克民歌,并且曾被风靡全球的俄罗斯方块选做背景音乐,这首音乐也就是我们今天要学习的歌曲《跳吧跳吧》。使学生对歌曲有一个初步的认识映像。(此时出示歌谱)并让学生带着“听听歌曲描绘的是一幅怎样的画面?”这一问题欣赏音乐。老师用钢琴弹唱歌曲。 2.学唱歌曲 总的教学方法:我主要采用跟唱、模唱、和学生间互相指导来进行学习。跟唱即老师唱一句,学生唱一句。模唱是全体学生用“la”来唱,帮助加强歌曲的音准
66AK DSP程序优化说明 此文档不介绍具体技术细节,相关技术细节,还望仔细理解官方文档。如有疑问:请加QQ156898965 平台配置 66ak存储资源结构: 存储资源包括DDRA、DDRB,共享内存MSMC,每个核的局部L2、L1P、L1D。由于整个芯片的地址空间是物理统一编址的。L1,L2运行时钟为主频,常规64系列L2运行时钟为主频一半。MSMSRAM 运行在主频。DSP core直接读取L1,L2,通过MSMC读取SRAM,外部DDRA。 DDRA DDRB L1P可配置程序缓存;L1D可配置数据一级缓存,2-WayCache;L2可配置数据二级缓存,4-WayCache。缓存区域从高地址开始分配。如下图:
程序数据存放区域分类 程序存放区域:用于存放所有可以执行的代码和常量,程序运行过程中,不会发生改变; 数据存放区域:用于全局变量和局部变量保留的空间,程序运行过程中会发生改变; 堆栈存放区域:为系统堆栈保留的空间,用于和函数传递变量或为局部变量分配空间。若因意外改变,会导致程序跑飞。 平台配置 通过新建或修改Platform文件来实现存储资源定义,Cache大小分配,及程序数据存放区域指定。以66ak12为例,缓存区域L1P,L1D 全部设置为缓存,L2缓存大小设置为256k。程序存放于DDRB,数据存放于L2,堆栈存放于L2进行。配置过程如下: Debug模式下,选择tools -> RTSC Tools -> Platform -> New,根据自己的需要选择Platform保存的路径以及对应的芯片,Next,填入所需要的各种空间的大小和起始位置。
TAKAYA飞针测试 TAKAYA飞针测试飞针测试的开路测试原理和针床的测试原理是相同的,通过两根探针同时接触网络的端点进行通电,所获得的电阻与设定的开路电阻比较,从而判断开路与否。但短路测试原理与针床的测试原理是不同的。TAKAYA飞针测试 APT-7400CN(FPT)可以检测的项目如下: 1.缺件 2.桥连 3.小焊点短路 4组件下面短路 5空焊 6组件常数不对 7组件特性不良 8组件种类错误 9组件极性错误 解决了针盘在线测之烦恼问题的飞针测试仪APT-7400CN TAKAYA的APT-7400CN是以移动探针方式进行测试的飞针在线测试仪。机器不需要任何针床夹具,与使用针床式在线测相比,可以大大节约测试成本。 机器针对脚间距在0.5mm(20mil)以下的焊盘也能用测针进行测试。超高密度SMT板也能检测,就是电路板的设计发生多次变更,也只要修正一下测试程序就可轻松对应。 机内还备有简易AOI检测功能,对未显示出电气特性的元器件缺件和安装错位,能以光学外观检测方式加以检出。 综上所述,APT-7400CN在SMT电路板检测和组装质量保证中显示出超群的威力!且特别方便运用于试生产板和中、小批量电路板的测试工序之中。 飞针测试机作用: 在SMT电路板测试和质量保证中显示威力的飞针在线测试系统对于高密度SMT电路板,仅使用目测手段、外观检测机(AOI)和功能测试仪,想要找到板上所有的不良是不可能的!此外,不良板的修理工序越往后道工程推移,修理的成本费用就越昂贵!为了解决这类问题,提高SMT板的质量,在世界各地的电路板组装在线已广泛使用在线测试仪。因此,
在线测工序也显示出了日倶增的重要性! 不过,传统的针床式在线测需根据不同电路板,分别制作高价的测试夹具。且对于间距小于1.27 mm(50mil)的焊点,几乎无法制作夹具。另外,已对做好了的针床,当电路板的焊盘设计发生变更时,将面临重新制作针床等颇烦脑筋的问题!APT-7400CN是以移动探针方式检测电路板之新型在线测试仪。测针在X,Y和Z方向一边移动一边检测电路板,所以无需使用高价针盘和其它检测夹具。使用本机后,既可减少制作针盘和测试夹具的成本,又能方便地对试产电路板和中小批量板进行测试。 工作原理: APT-7400CN是以移动探针方式检测电路板之新型在线测试仪。测针在X、Y和Z方向一边移动一边检测电路板,所以无需使用高价针盘和其它检测夹具。使用本机之后,既可减少制作针盘和测试夹具的成本,又能方便地对试产电路板和中小批量板进行测试。测针准确接触细小间距之测试点。对针盘夹具所不能竖针的高密度SMT电路板,机器也能简单、方便地以编程方式测试。另对光学、目视和功能检测所不能找到的微细焊点短路及组件常数错误等不良,机器都能精确地加以检出.本机实现了世界最高水平的测试速度和测针定位精度,且测试编程之方式也非常简单。 飞针测试市场之占有率、技术水准、机械可靠性等各方面均居世界第一的TAKAYA研发出机型APT-7400CN。既可减少SMT板等各种组装板的测试成本,又能在电路板的产品质量保证上做出卓越贡献。 飞针测试过程的测试和调试 在软件开发和装载完成以后,开始典型的飞针测试过程的测试调试。调试是测试开发员接下来的工作,需要用来获得尽可能最佳的UUT测试覆盖。在调试过程中,检查每个元件的上下测试极限,确认探针的接触位置和零件值。典型的1000个节点的UUT调试可能花6-8小时。飞针测试机的开发容易和调试周期短,使得UUT的测试程序开发对测试工程师的要求相当少。在接到CAD数据和UUT准备好测试之间这段短时间,允许制造过程的最大数量的灵活性。相反,传统ICT的编程与夹具开发可能需要160小时和调试16-40 小时。由于设定、编程和测试的简单与快速,实际上非技术装配人员,而不是工程师,可用来操作测试。也存在灵活性,做到快速测试转换和过程错误的快速反馈。还有,因为夹具开发成本与飞针测试没有关系,所以它是一个可以放在典型测试过程前面的低成本系统。并且因为飞针测试机改变了低产量和快速转换装配的测试方法,通常需要几周开发的测试现在数小时就可
A 正常程序: 1.在驾驶舱准备时将襟翼放出至少10°位置的原因是:便于对液压管路、线缆进行目视检查。 2.检查氧气量,确保压力最小为1800 psi 3.如果左液压系统或动力转换组件液压系统在运行,不要移动舱门控制阀销。阀杆臂由弹簧弹压在关闭位置,如果移动阀销,舱门将立 即关闭。 4.不要从前机轮舱内部移除前起落架舱门控制阀销。 5.如果有任何起落架上位锁未打开,该起落架在收上后就不能被锁定在收上位置。 6.APU启动:如果在右侧发动机下整流罩打开的情况下起动APU,会损坏该舱门。在起动APU之前,应通过目视方法或使用舱门概要页面,检查确认右侧发动机下整流罩舱门已经关上。 如果飞机已经在温度低于-20(℃-4)℉的寒冷条件下放置了较长时间或一整夜,且在起动APU时的环境温度为-20(℃-4)℉或更低,在尝试起动APU之前,应采取外部加温的方式给电瓶加温。在尝试起动APU之前,使用外接交流电源(如果可用)给电瓶充电和加温。 能够确保APU起动的最大高度为39,000英尺。在39,000英尺和43,000英尺之间的高度上,APU可能也能起动。 7.如果电瓶电压低于7伏,在飞行前应该给电瓶完全放电充电。如果在起动APU之前电瓶电压介于7伏到20伏之间,在下一次维修之前应该对电瓶进行彻底放电充电。
使用外部直流电源再次尝试起动APU时,必须先等待15分钟。这样做的目的是让外部电源设备到APU起动机之间的电缆线冷却下来。 放电完全的未损坏电瓶可以在大约90分钟内完成彻底的充电过程。 8.在每天的第一次飞行时,要检查外流活门的人工控制。 9.如果在前一次飞行后进行了自动加油,检查位于加油系统地面勤务控制面板上的AUTO REFUEL(自动加油)电门应处于OFF(关断)位。 10.如果在图表主页面上出现琥珀色“May Contain Outdated Data” (可能包括过期数据)语句,只要计划机场的NOTAM在放行前检查或当前纸质航图可用,或在放行前数据库已经升级,则飞行可以继续。 11.检查确认残余涡轮燃气温度(TGT)应低于150℃。否则,应执行发动机空转循环,以降低残余涡轮燃气温度(TGT)。 12.在顺风分量大于10节的条件下起动发动机时,应使发动机达到最大空转速度,并确认在将FUEL CONTROL(燃油控制)手柄选择到RUN(运行)位之前,获得可靠的低压涡轮转速 13.如果发动机关车时间超过20分钟但还没有达到5小时,在选择接通燃油控制手柄之前,应以最大空转高压涡轮转速转动发动机30秒钟。在这些起动过程中,发现发动机振动监控器(EVM)峰值高于警示水平(0.80)并非是异常情况。另外,在发动机正常起动之前,在不超过20分钟的时间内,发动机可能以最大空转高压涡轮转速至少持续转动60秒钟。 14.飞机滑行、起飞或着陆时,压差不得超过0.3磅/平方英寸。 15.如果飞机是向机场的另外一个停放地点滑行,应注意到当地面速
飞针测试: 飞针测试——就是利用4支探针对线路板进行高压绝缘和低阻值导通测试(测试线路的开路和短路)而不需要做测试治具,非常适合测试小批量样板。目前针床测试机测试架制作费用少则上千元,多则数万元,且制作工艺复杂,须占用钻孔机,调试工序较为复杂。而飞针测试利用四支针的移动来量度PCB的网络,灵活性大大增加,测试不同PCB板无须更换夹具,直接装PCB板运行测试程序即可。测试极为方便。节约了测试成本,减去了制作测试架的时间,提高了出货的效率。 “飞针”测试是测试的一些主要问题的最新解决办法。名称的出处是基于设备的功能性,表示其灵活性。飞针测试的出现已经改变了低产量与快速转换(quick-turn)装配产品的测试方法。以前需要几周时间开发的测试现在几个小时就可以了。对于处在严重的时间到市场(time-to-market)压力之下的电子制造服务(EMS, Electronic Manufacturing Services)提供商,这种后端能力大大地补偿了时间节省的前端技术与工艺,诸如连续流动制造和刚好准时的 (just-in-time)物流。快速转换生产的不利之事是,PCB可以在各种环境下快速装配,取决于互连技术与板的密度。顾客经常愿意对这种表现额外多付出一点。可是,当PCB已经装配但不能在可接受的时间框架内测试,他们不愿意付出拖延的价格。不可接受的测试时间框架延误最终发货有两个理由。一个理由是缺乏灵活的硬件;第二个是在给定产品上所花的测试开发时间。
许多原设备制造商(OEM)在做传统上一样快并没有价格惩罚的电路板时,不愿意承担快速转换(fast-turn)装配的费用。具有快速转换服务的EMS,但是不能在OEM的时间框架内出货的,一定要寻找一个解决方案。 什么是飞针测试? 飞针测试机是一个在制造环境测试PCB的系统。不是使用在传统的在线测试机上所有的传统针床(bed-of-nails)界面,飞针测试使用四到八个独立控制的探针,移动到测试中的元件。在测单元(UUT, unit under test)通过皮带或者其它UUT传送系统输送到测试机内。然后固定,测试机的探针接触测试焊盘(test pad)和通路孔(via)从而测试在测单元(UUT)的单个元件。测试探针通过多路传输(multiplexing)系统连接到驱动器(信号发生器、电源供应等)和传感器(数字万用表、频率计数器等)来测试UUT上的元件。当一个元件正在测试的时候,UUT上的其它元件通过探针器在电气上屏蔽以防止读数干扰(图一)。 飞针测试机可检查短路、开路和元件值。在飞针测试上也使用了一个相机来帮助查找丢失元件。用相机来检查方向明确的元件形状,如极性电容。随着探针定位精度和可重复性达到5-15微米的范围,飞针测试机可精密地探测UUT。 飞针测试解决了在PCB装配中见到的大量现有问题,如在开发时缺少金样板(golden standard board)。问题还包括可能长达4-6周的测试开发周期;大约$10,000-$50,000的夹具开发成本;
DSP编程的几个关键问题 摘要:对DSP串口的DMA传输方式使用中可能遇到的疑难问题、汇编指令歧义及C语言混合编程容易犯的错误作了列举分析,对Bootload编程的疑难点做出了实例解释。 关键词:汇编指令的歧义 Bootload Bug McBSP Multi-Frame DSP芯片凭其优异的性能在高速计算领域有着巨大的应用前景。但其应用所涉及的知识非常庞杂。本文以TI公司320C54X系列为蓝本进行提纯,所有认识都是笔者在实际工作中亲手实践所得。当程序调不通不知该从何处下手时,此文也许会有所帮助。这些关键点有些是TMS320C5409所触有而有些是与DSP所共有的。 1 McBSP(Multichannel Buffered Serial Port)串口利用DMA中的多帧(Multi-Frame)方式通信的中断处理 在实际通信应用中,一个突发之后,程序必须为下一个突发作准备。因此一般采用串口的DMA多帧方式但在串口以DMA方式传输数据时却有一些问题要讨论。首先DMA的传输同步事件应设McBSP的传输事件即XEVT,这样一字节传输后会自动准备另一字节(McBSP的READY上升沿触发DMA传输)。中断发生时意味着一个块已传完,这时DMA的使能自动关闭,McBSP的READY将一直保持高状态。但是在下一次突发传输直接使能DMA 时却启动不了传输(相信会有许多我遇到此类问题)。这是因为无法产生McBSP触发启动所需的READY上升沿。解决办法是在中断程序中先关闭McBSP的发送,使READY=0,随后在程序中发送使能DMA,再打开McBSP的发送即可。如先打开McBSP的发送后打开DMA,也是不会工作的。因为McBSP的READY已经由0变到1了,无法再产生READY上升沿。 2 关闭DMA与关闭McBSP的区别 在通信领域,为了充分利用DSP的片上外设资源,常常利用DMA把从串口来的数据或要发的数据放入缓冲区,再处理。对DMA而言,只要其在数据缓冲区的指针指向了中断应发生的位置,就产生中断。但此时最后一个数据只是进入了McBSP而并未真正发出去,所以在传送结束的中断程序中只能关闭DMA不能关闭McBSP。因为此时McBSP的发寄存器DXR中还有一个字没有发出。 3 McBSP串口配置的关键时序 主要是寄存器SPCR2的配置:在保持RRST、XRST、FRST各位为0的前提下,配置好其它串口控制寄存器。等待至少2个CLKR/T时钟以确保DSP内部的同步。 (1)可以向DXR装载数据或使能DMA。 (2)使能GRST(GRST=1)(如果需要DSP内部产生采样时钟)。 (3)使能RRST或XRST,注意此时要保证SPCR中仅有此一位发生改变。 (4)使能FRST(FRST=1)(如果需要DSP内部产生帧同步)。
飞行程序设计步骤及作图规范 飞行程序设计步骤 第一节扇区划分 1.1以本场归航台为圆心,25NM(46KM)为半径画出主扇区,位于主扇区的边界之外5NM(9KM)为缓冲区。主扇区和缓冲区的MOC相同,平原为300米,山区600米。 1.2扇区划分 2. MSA采用50米向上取整。 第二节确定OCH f 2.1假定FAF的位置,距离跑道入口距离为,定位方式。 2.2假定IF的位置,定位方式,中间航段长度为。 2.3分别作出最后和中间段的保护区,初算OCH中。 OCH中= Max{H OBi+MOC},H OBi:中间段保护区障碍物高度 2.4确定H FAF(H FAF=OCH中),计算最后段的下降梯度,以最佳梯度5.2%调整FAF、IF的位置。 2.5根据调整的结果,重新计算OCH f。 OCH f= 。
[注] OCH f是制定机场运行标准的因素之一,也属于飞行程序设计工作的一方面,有兴趣的同学可以参阅《民航局第98号令》。 第三节初步设计离场、进场、进近方法及等待点的位置和等待方法。 (1)进场、离场航迹无冲突,航迹具有侧向间隔,或垂直间隔(低进高出);(2)仪表进场程序根据机场周围航线布局、导航布局以及进场方向,选择合适的进近方式,优先顺序为:直线进近,推测航迹,沿DME弧进近,反向程序,直角航线; (3)注意进场航线设置与几种进近方式的衔接; (4)机场可以根据进场方向设置几个等待航线,等待位置尽可能与IAF点位置一致,但不强求; (5)合理规划导航台布局,最大限度地利用导航台资源。 第四节仪表离场程序设计 首先根据机场周边航线分布,确定各个方向的离场方式(直线/转弯); 4.1直线离场: 4.1.1航迹引导台; 4.1.2有无推测航迹,长度KM; 4.1.3确定保护区; 4.1.4对保护区内障碍物进行评估 4.2转弯离场
优化测试数据,提高飞针测试的真实性和工作效率2008-6-4 15:16:07 资料来源:PCB制造科技作者: 摘要:移动探针测试(飞针测试)是一种有效的印制板最终检验方法。它能根椐用户设计的网络逻辑关系来判断印制板的电连接性能是否与用户的设计一致。它的操作可以说是完全依靠软件的应用,软件应用得合理测试就会发挥最大的优势。一般情况下用户不是十分了解测试的实现方法,在设计过程中往往只注意他的设计是否与他预期的目标一致。因此他们所提供的印制板加工资料有时就不太适合我们的实际操作,或者是在我们操作时达不到最佳的工作效率。这就要求我们的技术人员对用户的资料进行优化以提高测试的真实性和工作效率。 一.概述 一般而言,印制板测试主要有两中方法。一种是针床通断测试,另一种是移动探针测试(flying probe test system)也就是我们通常所说的飞针测试。对于针床通断测试而言,它是针对待测印制板上焊点的位置,加工若干个相应的带有弹性的直立式接触探针真阵列(也就是通常所说的针床),它是通过压力与探针相连接。探针另一端引人测试系统,完成接电源、电和信号线、测量线的连接。从而完成测试。这种测试方法受印制板上焊点间距的限制很大。众所周知,印制板的布线越来越高,导通孔孔径、焊盘越来越小。随着BGA的I/O 数不断增加,它的焊点间距不断减小。 对针床测试所用的测试针的直径要求越来越细。探针的直径越来越细,它的价格就越昂贵。无疑印制板的测试成本就相应的增加许多。另外,针床测试一般都需要钻测试模板.但是针床通断测试的测试速度要比移动探针测试快的多。 移动探针测试是根据印制板的网络逻辑来关系,利用2-4-8根可以在印制板板面上任意移
//实例42:用定时器T0查询方式P2口8位控制LED闪烁#include
PCB飞针测试 什么是飞针测试?飞针测试是一个检查PCB电性功能的方法(开短路测试)之一。飞测试机是一个在制造环境测试PCB的系统。不是使用在传统的在线测试机上所有的传统针床(bed-of-nails)界面,飞针测试使用四到八个独立控制的探针,移动到测试中的元件。在测单元(UUT,unitundertest)通过皮带或者其它UUT传送系统输送到测试机内。然后固定,测试机的探针接触测试焊盘(testpad)和通路孔(via)从而测试在测单元(UUT)的单个元件。测试探针通过多路传输(multiplexing)系统连接到驱动器(信号发生器、电源供应等)和传感器(数字万用表、频率计数器等)来测试UUT上的元件。当一个元件正在测试的时候,UUT 上的其它元件通过探针器在电气上屏蔽以防止读数干扰。 飞针测试程式的制作的步骤: 方法一 第一:导入图层文件,检查,排列,对位等,再把两个外层线路改名字为fronrear.内层改名字为ily02,ily03,ily04neg(若为负片),rear,rearmneg。 第二:增加三层,分别把两个阻焊层和钻孔层复制到增加的三层,并且改名字为fronmneg,rearmneg,mehole.有盲埋孔的可以命名为met01-02.,met02-05,met05-06等。 第三:把复制过去的fronmneg,rearmneg两层改变D码为8mil的round。我们把fronmneg叫前层测试点,把rearmneg叫背面测试点。 第四:删除NPTH孔,对照线路找出via孔,定义不测孔。
第五:把fron,mehole作为参考层,fronmneg层改为on,进行检查看看测试点是否都在前层线路的开窗处。大于100mil的孔中的测试点要移动到焊环上测试。太密的BGA处的测试点要进行错位。可以适当的删除一些多余的中间测试点。背面层操作一样。 第六:把整理好的测试点fronmneg拷贝到fron层,把rearmneg拷贝到rear 层。 第七:激活所有的层,移动到10,10mm处。 第八:输出gerber文件命名为fron,ily02,ily03,ily04neg,ilyo5neg,rear,fronmneg,rearmneg,mehole,met01-02,met02-09,met09-met10层。 然后用Ediapv软件 第一:导如所有的gerber文件fron,ily02,ily03,ily04neg,ilyo5neg,rear,fronmneg,rearmneg,mehole,met01-02,met02-09,met09-met10层。 第二:生成网络。netannotationofartwork按扭。 第三:生成测试文件.maketestprograms按扭,输入不测孔的D码。 第四:保存, 第五:设置一下基准点,就完成了。然后拿到飞针机里测试就可以了。 个人感觉:1、用这种方法做测试文件常常做出很多个测试点来,不能自动删除
CAM350操作流程 一.接受客户资料,将.pcb文件进行处理:用Protel 99SE或者DXP软件进行格式转换,(1)Protel 99 SE操作过程如下:鼠标左键双击.pcb文件出现如图1-1画面,一般来说Design Storage T不须更改,如果有需要的话可以对文件命名(Database)和路径(Database Location)进行适当修改。 图1-1 出现画面如图1-2所示。进行编辑Edit-Qrigin-Set定位,一般取左下角点作为定位点如图1-3所示。
图1-3 定位完后,进行Gerber格式的产生。首先点File--CAM Manger出现Output Wizard 窗口点击Next选则Gerber然后继续Next直到出现如图1-4所示画面,点击Menu选择Plot Layers –All On,一直点Next ,最后点击Finish。接着右键点击Insert NC Drill,出现画面选择比例2:4点OK。最后点击右键选择Generate CAM Files (F9) 完成格式的转换。 图1-4
(2)DXP软件操作流程如下:点击File-Open-(.PCB)出现如图1-5所示画面,然后进行Edit—Orign-Set 进行定位。 图1-5 定位完后,进行Gerber格式的产生。点击File-Fabrication Outputs-Gerber Files,出现Gerber Steup,在General下选择Format 2:4;在Layers下选择Plot Layers –All On,OK完成。如图1-6所示 。
飞针测试原理 飞针测试的开路测试原理和针床的测试原理是相同的,通过两根探针同时接触网络的端点进行通电,所获得的电阻与设定的开路电阻比较,从而判断开路与否。但短路测试原理与针床的测试原理是不同的。由于测试探针有限(通常为4∽32根探针),同时接触板面的点数非常小(相应4∽32点),若采用电阻测量法,测量所有网络间的电阻值,那么对具有N个网络的PCB而言,就要进行N2/2次测试,加上探针移动速度有限,一般为10点/秒到50点/秒,不同的测试方法有:充/放电时间(Charge/discharge rise time)法、电感测量(Field measurement)法、电容测量(Capacitance measurement)法、相位差(Phase difference)和相邻网(Adjacency)法、自适应测试(Adaptive measuring)法等等。 1.1充/放电时间法 每个网络的充/放电时间(也称网络值,net value)是一定的。如果有网络值相等,它们之间有可能短路,仅需在网络值相等的网络测量短路即可。它的测试步骤是,首件板:全开路测试→全短路测试→网络值学习;第二块以后板:全开路测试→网络值测试,在怀疑有短路的地方再用电阻法测试。这种测试方法的优点是测试结果准确,可靠性高;缺点是首件板测试时间长,返测次数多,测试效率不高。最有代表性的是MANIA公司的SPEEDY机。 1.2电感测量法 电感测量法的原理是以一个或几个大的网络(一般为地网)作为天线,在其上施加信号,其他的网络会感应到一定的电感。测试机对每个网络进行电感测量,比较各网络电感值,若网络电感值相同,有可能短路,再进行短路测试。这种测试方法只适用于有地电层的板的测试,若对双面板(无地网)测试可靠性不高;在有多个大规模网络时,由于有一个以上的探针用于施加信号,而提供测试的探针减少,测试效率底,优点是测试可靠性较高,返测次数低。最有代表性的是ATG公司的A2、A3型机,为弥补探针数量,该机配有8针和16针,提高测试效率。 1.3电容测量法 这种方法类似于充/放电时间法。根据导电图形与电容的定律关系,若设置一参考平面,导电图形到它的距离为L,导电图形面积为A,则C=εA/L。如果出现开路,导电图形面积减少,相应的电容减少,则说明有开路;如果有两部分导电图形连在一起,电容响应增加,说明有短路。在开路测试中,同一网络的各端点电容值应当相等,如不相等则有开路存在,并记录下每个网络的电容值,作为短路测试的比较。这种方法的优点是测试效率高,不足之处是完全依赖电容,而电容受影响因数较多,测试可靠性低于电阻法,特别是关联的电容和二级电容造成的测量误差,端点较少的网络(如单点网络)的测试可靠性较低。目前采用这种测试方法的有HIOKI和NIDEC READ公司的飞针测试机。 1.4相位差方法 此方法是将一个弦波的信号加入地层或电层,由线路层来取得相位落后的角度,从而取得电容值或电感值。测试步骤是首件板先测开路,然后测其他网络的相位差值,最后测
单片机看门狗程序 /*此程序实现单片机"看门狗"WDT的功能*/ #include "p18f458.h" unsigned long i; /*系统初始化子程序*/ void initial() { TRISD = 0X00; /*D口设为输出*/ } /*延时子程序*/ void DELAY() { for (i=19999;--i;) continue; } /*主程序*/ main () { initial(); /*初始化,设定看门狗的相关寄存器*/ PORTD = 0X00; /*D口送00H,发光二极管亮*/ DELAY(); /*给予一定时间的延时*/ PORTD = 0XFF; /*D口送FFH,发光二极管灭*/ while(1)
{ ; } /*死循环,等待看门狗溢出复位*/ } -------------------汇编语言版本的单片机看门狗程序---------------- ;此程序实现"看门狗"WDT的功能 ;此单片机看门狗由https://www.doczj.com/doc/a55620574.html,独家提供 LIST P=18F458 INCLUDE "P18F458.INC" DEYH EQU 0X20 DEYL EQU DEYH+1 ORG 0X00 GOTO MAIN ORG 0X30 ;*************初始化子程序***************** INITIAL CLRF TRISD ;D口设为输出 RETURN ;**************延时子程序************************** DELAY MOVLW 0XFF MOVWF DEYH AGAIN1
CAM350处理飞针机测试文件 1. 调入图形资料 打开CAM350的主程序,如果板的文件是PCB格式文件,可用File\Open打开文件进行编辑(注意:CAM350的数据格式与Protel、Pads、PowerPcb设计的PCB文件格式是不兼容的)。如果文件是Gerber file格式文件就用File\Import\Auto Import(自动导入)功能调入RS-274-X格式的Gerber file文件,操作步骤如下: 1.1 选择菜单File\Import\Auto Import(自动导入)选项。 1.2 在对话框中,点选Gerber file单位是英制或公制(English or Metric),按Finish完成。 图一 图二 1.3 需要注意,要输入的所有Gerber file 必须放在同一文件夹中,其中不能同时有不相关
的文件,这样才能正确读取Gerber file文件。 备注:标准的 Gerber file格式文件分为RS-274与RS-274-X两种,其不同在于: A:RS-274格式的坐标数据与D码是分开保存在两个文件中,且一一对应,Auto Import(自动导入)功能可以自动辨认对应的D码文件(不同的CAD软件产生的D码文件格式是不同的)。B:RS-274-X格式的坐标数据与D码保存在一个文件中,因此不需要D码文件。一般原始文件是RS-274格式文件,工程文件是RS-274-X格式文件。 2. 如果文件中有复合层(一层线路文件由几层甚至十几层组成),则要先对复合层进行处理,把它转成一层文件,用命令Utilities\Composite->Layer把复合层转成新的一层文件。 3. 图层排序,一般的排列顺序是前层线路、内层线路、后层线路、前层阻焊、后层阻焊、前层字符、后层字符、孔层,命令是Edit\Layers\Reorder,(以四层板为例:GTL-G1-G2-GBL-GTS-GBS-GTO-GBO-TXT)。 其中GTL:前线路层,G1:内层,G2:内层,GBL:后线路层,GTS:前阻焊层, GBS:后阻焊层,GTO:前字符层,GBO:后字符层,TXT:钻孔层。 4. 仔细查看图形,删除不需要的图层,命令是Edit\Layers\Remove,在被删除的图层后面的白色小框中打勾,点击OK。一般需要的层:前层线路,内层,后层线路,前层阻焊,后层阻焊,孔层。其它的层可以删除掉。 5. 对齐图层,把所有有用的图层以一层为标准对齐,命令是Edit\Layers\Align,先用左键选中目的地参考基准后右键确定,左键选中被移动的图层相对应参考基准后再右键双击确定。 6. 如果孔层是钻孔数据(NC Data)的话,要先把它变为Gerber file格式数据。方法是用命令Tools\NC Editor进入钻孔编辑界面,然后用命令Utilities\NC Data to Gerber 把NC数据转为Gerber file格式数据。 7. 把所有层对齐后,增加两个空层,命令是Edit\Layers\Add Layer,把前后层的阻焊层数据分别用命令Edit\Copy复制到增加的空层中。 8. 把复制的阻焊层中线全部变为焊盘,用命令Utilities\Draws->flash\Automatic进行自动转换,未转换的部分再手动转换,命令是Utilities\Draws->flash\Interactive,先框选需转换的部分,在弹出的对话框中输入更改后的尺寸大小。 9. 在复制的阻焊层中线全部转换为焊盘后,再统一改为同一个尺寸焊盘,一般大小为4mil-8mil,线路层密的要变小一点,一般为6mil。方法是:先用命令Table\Apertures定义一个D码,选择最后的Dcode号,Shape选择Round,Diameter输入尺寸例如6mil,然后按Enter 即可,再用命令Edit\Change\Dcode,选择全部图层数据后右键鼠标,在弹出的对话框中选择前面定义的Dcode号,则所有焊盘都改为同一大小。 10. 设置复合层,命令是Tables\Composite,把统一尺寸后复制的阻焊层设为正(Dark),把Gerber数据的孔层设为负(Clear),如图三,设置完毕后再输出复合层,命令是Utilities\Convert Composite,在新增加的层中,把所有的线转换为焊盘,大小一般是4mil-8mil.(所增加的层就是飞针机的测试层)。
飞行程序设计步骤及作图规范 第一章地图作业说明 1、地图比例尺:1:200000 2、在地图上先按比例标出跑道、导航设施 3、在地图上以机场归航台(YNT)为基准画出机场周边航线 4、等高距100米 [注] 相关机场数据及航线设置参见附录1,2 第二章作图规范说明 1.制图应整洁完整,航迹用较深笔迹,保护区用较浅笔迹; 2.按航图规范画出导航台,并标以名称(二字、三字代码); 3.定位点要标出导航方式(径向线、方位线、DME弧距离),对重 要定位点要给出过点高度;(R210°D15.0YNT 2400m or above)4.航迹要给出方向,“067°”,以非标称梯度爬升时要标明爬 升梯度:“4.0%”。 5.等待、直角航线、基线转弯程序要给出入航、出航边的磁航向。
第三章飞行程序设计步骤 第一节扇区划分 1.1以本场归航台为圆心,25NM(46KM)为半径画出主扇区,位于主扇区的边界之外5NM(9KM)为缓冲区。主扇区和缓冲区的MOC 相同,平原为300米,山区600米。 1.2扇区划分 2. MSA采用50米向上取整。 第二节确定OCH f 2.1假定FAF的位置,距离跑道入口距离为,定位方式。 2.2假定IF的位置,定位方式,中间航段长度为。 2.3分别作出最后和中间段的保护区,初算OCH中。 OCH中= Max{H OBi+MOC},H OBi:中间段保护区障碍物高度 2.4确定H FAF(H FAF=OCH中),计算最后段的下降梯度,以最佳梯度5.2%调整FAF、IF的位置。
2.5根据调整的结果,重新计算OCH f。 OCH f= 。 [注] OCH f是制定机场运行标准的因素之一,也属于飞行程序设计工作的一方面,有兴趣的同学可以参阅《民航局第98号令》。 第三节初步设计离场、进场、进近方法及等待点的位置和等待方法。(1)进场、离场航迹无冲突,航迹具有侧向间隔,或垂直间隔(低进高出); (2)仪表进场程序根据机场周围航线布局、导航布局以及进场方向,选择合适的进近方式,优先顺序为:直线进近,推测航迹,沿DME 弧进近,反向程序,直角航线; (3)注意进场航线设置与几种进近方式的衔接; (4)机场可以根据进场方向设置几个等待航线,等待位置尽可能与IAF点位置一致,但不强求; (5)合理规划导航台布局,最大限度地利用导航台资源。 第四节仪表离场程序设计 首先根据机场周边航线分布,确定各个方向的离场方式(直线/转弯); 4.1直线离场: 4.1.1航迹引导台; 4.1.2有无推测航迹,长度KM; 4.1.3确定保护区; 4.1.4对保护区内障碍物进行评估