
新型旋转LED显示屏
一、所遇问题
1.每一点显示时间
保证每个显示点在同一位置显示20次/秒,
单排:单排LED显示屏需要高速电机,这样会较大的消耗功率。
多排:多排LED显示相比于单排LED可以从转速上降低,并且可以将圆周分辨率控制在允许范围内。
LED显示排数电机转速
rpm
电机转速
rps
在圆周分辨率为360点,每个
点的时间间隔(ms)
备注
每排功率占总功率
1 1200 20 1/(20*360)=0.13ms 1/360
2 600 10 1/(10*360)=0.26ms 1/180
4 300
5 1/(5*360)=0.52ms 1/90
8 200 3.3 1/(2.5*2160)=1.04ms 1/45
人眼最小视觉暂留为0.02s=20ms,这样我们选取多排LED可以完全降低我们需求的电机转速
针对LED亮度的问题:
由于是旋转扫描,在每一列上所持续的时间是有限的,设半径为R,在显示每一列时由每列持续时间得到的几何尺寸是d,单显示列的情况下,每一列的点亮时间t为t=(d/2?R)。若采用为(D5mm发光管,d=5mm,当R=300mm时,t=(5/2?0
30)=1/377。可见每列点亮时间只有377分之一,这使得单点亮度比其16循环的十六分之一来只有传统显示屏的23分之一。为了解决亮度偏低的问题,可采用两个办法一个是增加显示器件LED的亮度,选用超高亮度LED,另一个是增加显示阵列,如双阵列,四阵列,这些方法虽然可以大大提高亮度,但由于LED亮度和显示列数不可能做的很大,所以旋转柱式显示屏目前仍然只能作为室内或室外夜间使用。
关于LED抖动和失真的问题:
用单片机控制LED的点亮状态的精度是很高的,但是普通电机的转动角速度不会绝对保持恒定状态,不能保证LED在经过某一位置时其点亮情况完全相同,即使是电机的微小波动也会造成图像的失真和抖动现象。步进电机是将电脉冲信号转变为角位移或线位移的开环控制元步进电机件。在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度,称为“步距角”,它的旋转是以固定的角度一步一步运行的。可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。显示屏转过的角度始终为步距角,而与ω无关,因此,图像就不会再因旋转角速度的变化而产生失真,并且步进电机不会产生积累误差。关于显示屏是否达到准确位置的校准问题:
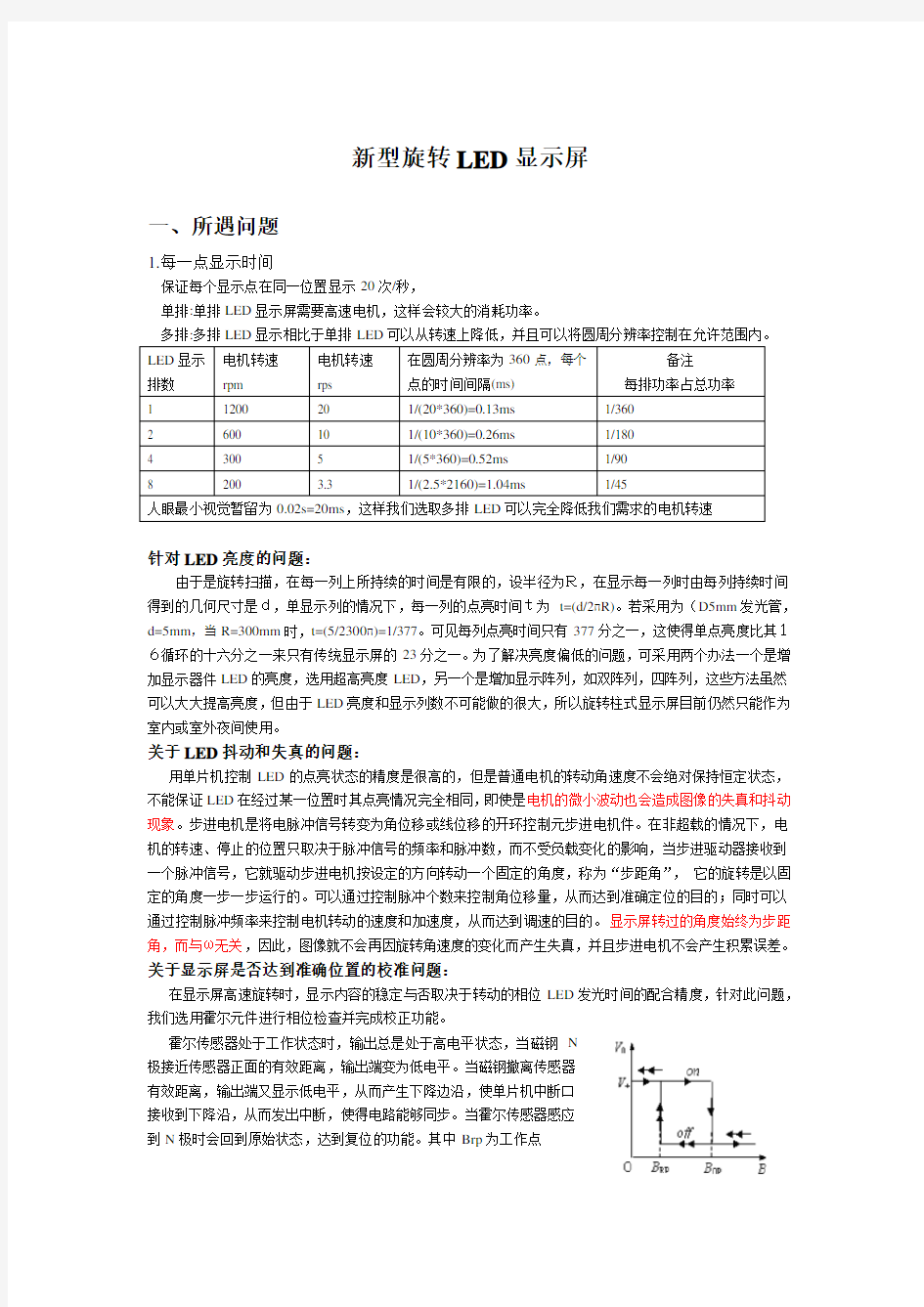
在显示屏高速旋转时,显示内容的稳定与否取决于转动的相位LED发光时间的配合精度,针对此问题,我们选用霍尔元件进行相位检查并完成校正功能。
霍尔传感器处于工作状态时,输出总是处于高电平状态,当磁钢N
极接近传感器正面的有效距离,输出端变为低电平。当磁钢撤离传感器
有效距离,输出端又显示低电平,从而产生下降边沿,使单片机中断口
接收到下降沿,从而发出中断,使得电路能够同步。当霍尔传感器感应
到N极时会回到原始状态,达到复位的功能。其中Brp为工作点
“开”的磁感应强度,Bnp为释放点“关”的磁感应强度。当外加的磁感应强度超过动作点Brp时,传感器输出为低电平,当磁感应强度超过动作点Brp时,传感器输出高电平,当磁感应强度降到动作点Bnp以下时,传感器输出。电平不变,一直要降到释放点时,传感器才由低电平跃变为高电平。Brp与Bnp之间的滞后使开关动作更为可靠。
2.电源传输的结构设计:
方案1采用固定电池
供电。即在电路板是直
接附带一个蓄电池,为
系统供电。这种供电方
式比较简单。但是,有两
个问题难以解决。首先,
高亮度LED的功耗比较大,而电池的蓄电量有限,这就难以实现系统的长期运作。其二,由于电池的体积和重量比较大,若固定在板子上,电量用完后,难以替换。若不固定,在电机转动的时候可能会甩出去,引起安全隐患。同时,也增加了旋转重心的调节的难度。故不采用此方法。
方案2采用电刷供电。
即在电机的转轴上,手工
增加一个电刷,通过电刷
为系统供电。此方法能够
让系统长期供电,但是由
于增加了电刷,电机的摩
擦增大,势必会使系统的
功耗增加。故不采用此方
法。
方案3从电机转子中引出电源线,为系统供电。此方法直接在电机的转子中引出电源线,通过整流滤波后,可以作为系统供电,同时也可以作为系统控制时序的中断源。此方法容易实现,并且一举两得,因此选用。
3.数据存储系统设计
在控制板上有两片刷新存储器,分别称为刷新存储器A和B。这两片存储器由接口控制交替工作。例如,某一时刻单片机将下一幅显示内容往A中写入,同时刷新电路读出B中内容输出到显示列,等A中内容组织完毕后,切换接口,刷新电路从A中读出数据送去显示,单片机又往B中组织下一幅显示内容,如此反复,则使显示屏完成诸如上下滚,左右飞入飞出,闪烁,拉幕等多种动感强烈的显示方式.
4.LED接口电路设计:
方案1采用数字信号处理单片机MSP430和LED驱动芯片接口,由于MSP430速度比较快,有较强的运算能力,大大提高了计算调整LED显示的时间的模糊算法的时间,并且能够快速的对通讯数据进行CRC 校验,减少了程序的复杂程度。
方案2采用单片机A T89S52与LED驱动芯片MAX6969接口,A T89S52逻辑能力较强但速度比较慢,价格相对比较便宜,但工作量要比方案1大的多。
5.通讯模块选择:
方案1使用采用红外通讯,电路简单,但红外通讯需要大量的编码、译码,程序设计复杂,且由于A T89S52
速度比较慢,在短时间难以做太多的运算,故不采用此方法。
方案2使用数字载波无线通讯。电路比较简单,使用方法也简单,只需把数据送到串口,就可以立即发送,无需进行初始化,不需要对数据进行曼切斯特编码,具有半双工的通讯功能,并且有两个通讯频道,受外界影响较小。在处理器运算速度相对比较慢的情况下,采用此方法。
二、需要掌握的知识
1.DDS正弦波的算法
直接数字式频率合成器——DDS?DDS原理:DDS主要由四部分组成,第一部分为相位累加器,用于决定输出信号频率的范围和精度;第二部分为正弦函数功能表(波形存储器),用于存储经量化和离散后的正弦函数的幅值;第三部分为D/A转换,可产生所需的模拟信号;第四部分为低通滤波,用来减少量化噪声、消除波形尖峰。参考频率源是一个高稳定度的晶体振荡器,它是用高稳定的固定时钟频率来对所要合成的信号进行相位取样的,单位时间内取样量越大,则合成的频率越低。取样量的大小由可程控的频率设定数据决定。其工作过程为:?将存于ROM中的数字波形,经数模转换器D/A,形成模拟量波形。?两种方法可以改变输出信号的频率:(1)改变查表寻址的时钟频率,可以改变输出波形的频率。(2)改变寻址的步长来改变输出信号的频率。步长即为对数字波形查表的相位增量。由累加器对相位增量进行累加,累加器的值作为查表地址。?D/A输出的阶梯形波形,经低通(带通)滤波,成为质量符合需要的模拟波形。
由上图所示可知。相位累加器是DDS的核心所在,它由一个加法器和一个位相位寄存器组成,每来一个时钟,相位寄存器以步长增加,相位寄存器的输出与相位控制字相加,然后输入到正弦查询表地址上。正弦查询表包含一个周期正弦波的数字幅度信息,每个地址对应正弦波中0-360°范围的一个相位点。查询表把输入的地址相位信息映射成正弦波幅度的数字量信号,驱动DAC,输出模拟量。相位寄存器每经过2^N/M 个fc时钟后回到初始状态,相应地正弦查询表经过一个循环回到初始位置,整个DDS系统输出一个正弦波。输出正弦波周期为To=Tc*2^N/M。最小分辨率为fo=fc/2^N。(N为累加器位宽,M为步长,Tc为时钟周期)
2.74HC595芯片资料
74HC595各个引脚的功能:
Q1~7 是并行数据输出口,即储寄存器的数据输出口
Q7' 串行输出口,其应该接SPI总线的MISO接口
STcp 存储寄存器的时钟脉冲输入口
SHcp 移位寄存器的时钟脉冲输入口
OE的非输出使能端
MR的非芯片复位端
Ds 串行数据输
74HC595是具有8位移位寄存器和一个存储器,三态输出功能。移位寄存器和存储器是分别的时钟。数据在SHcp的上升沿输入,在STcp的上升沿进入的存储寄存器中去。如果两个时钟连在一起,则移位寄存器总是比存储寄存器早一个脉冲。移位寄存器有一个串行移位输入(Ds),和一个串行输出(Q7’),和一个异步的低电平复位,存储寄存器有一个并行8位的,具备三态的总线输出,当使能OE时(为低电平),存储寄存器的数据输出到总线。
3.驱动装置MAX6969
在选取驱动芯片时要考虑2个问题:1.输出功率,。LED的亮度直接决定了显示屏的可见范围。采用大电流驱动芯片,使得可视距离更远。高功耗,同时意味着芯片的能够良好的散热2.为了能够更清晰的显示字体和图像,芯片的工作速度是不可忽视的。芯片必须能够快速响应和编码输出。根据各种需求选取MAX6969来驱动LED。
MAX6969的串口为4线串
口,使用4路输入(DIN、CLK、
LE和OE) 和1路数据输出
(DOUT)。该接口用于向MAX6969
写入显示数据。串口数据字长为
16位即D0–D15。五个接口引
脚的功能如下所述。DIN是串行数
据输入,在CLK信号的上升沿进
行采样时必须保持稳定。数据移入
时,首先移入MSB。即首先同步
输入数据位D15,然后依次输入其
它15位数据,到LSB位D0结束。CLK是串行时钟输入,在其上升沿将数据通过DIN移入MAX6969的16位移位寄存器。LE是MAX6969锁存器的装载输入。LE为高电平时(透明传输锁存器),数据由MAX6969的16位移位寄存器传输至16位锁存器,并在LE下降沿锁存数据。
(注:文档可能无法思考全面,请浏览后下载,供参考。可复制、编制,期待你的好评与关注)