教案
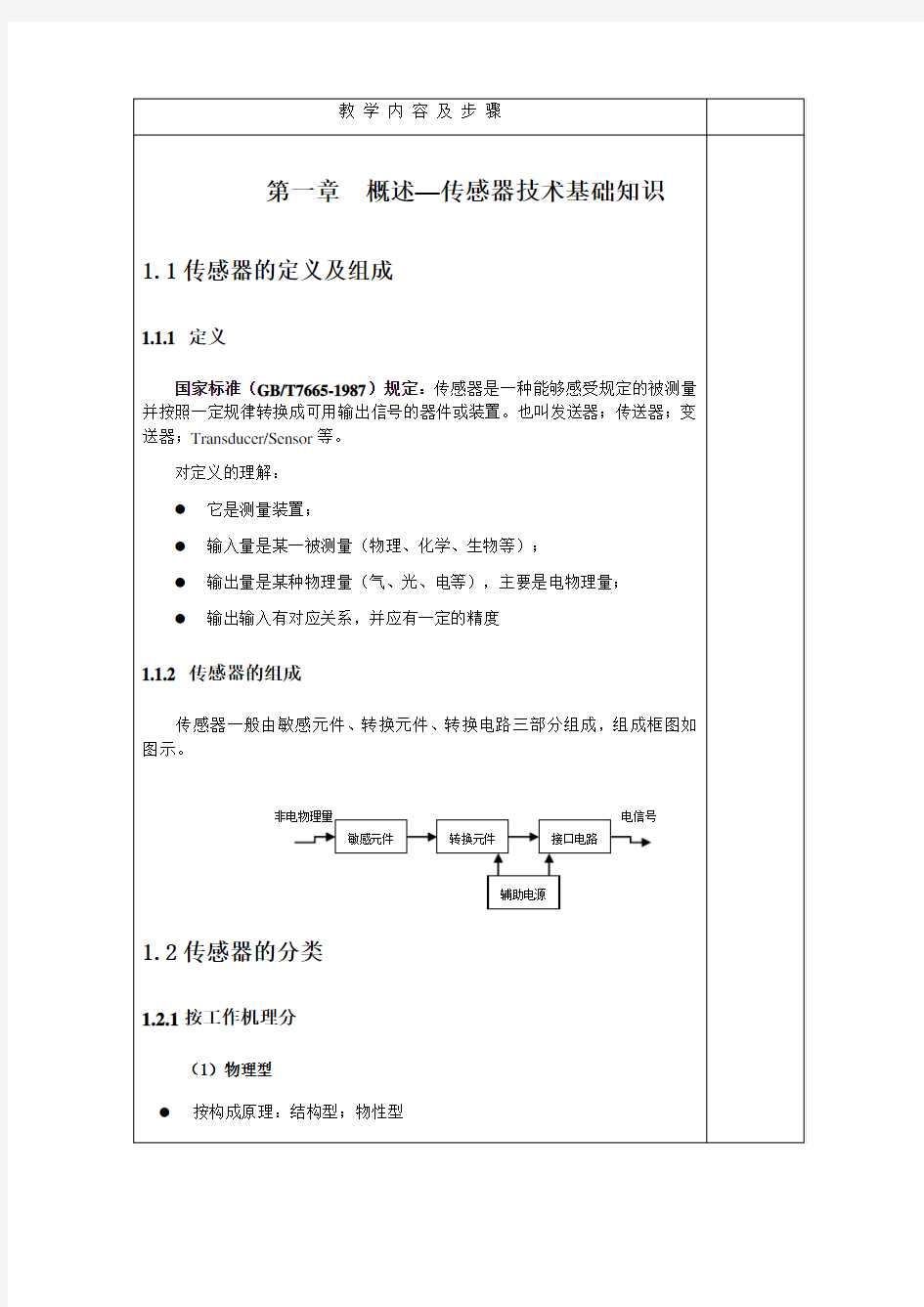
衡量传感器静态特性的主要技术指标有线性度、测量范围和量程、重复性、迟滞、灵敏度等。
(1)测量范围和量程
传感器所能测量的最大被测量(即输入量)的数值称为测量上限,最小的被测量则称为测量下限,而用测量下限和测量上限表示的测量区间,则称为测量范围,简称范围。测量上限和测量下限的代数差为量程。即:量程=测量上限-测量下限。
(2)线性度
在采用直线拟合线性化时,输出输入的校正曲线与其拟合直线之间的最大偏差,就称为非线性误差或线性度,通常用相对误差来表示,即
ΓL=±(ΔLmax/Y FS)100%
ΔLmax:最大非线性误差
Y FS:满量程输出
由此可见,非线性误差的大小是以一定的拟合直线为基准直线而得出来的。拟合直线不同,非线性误差也不同。所以,选择拟合直线的主要出发点,应是获得最小的非线性误差。另外,还应考虑使用是否方便,计算是否简便。
(3)迟滞
传感器在正(输入量增大)反(输入量减小)行程中输出输入曲线不重合称为迟滞。
迟滞特性一般是由实验方法测得。迟滞误差一般以正反行程中输出的最大偏差量满量程输出之比的百分数表示,即
迟滞的影响因素包括传感器机械结构中的摩擦、游隙和结构材料受力变形的滞后现象等。
(4)重复性
重复性是指传感器在输入按同一方向作全量程连续多次变动时所得的特性曲线不一致的程度。图示为实际输出的校正曲线的重复特性,正行程的最大重复性偏差为ΔR max1,反行程的最大重复性偏差为ΔR max2。重复性误差取这两个最大偏差之中较大者为ΔR max,与满量程输出y FS之比的百分数表示,即
重复性误差也常用绝对误差表示。
(5)灵敏度与灵敏度误差
传感器输出的变化量Δy与引起此变化量的输入变化量Δx之比即为其静态灵敏度,其表达式为:
(6)分辨力
分辨力是指传感器在规定测量范围内所能检测出被测输入量的最小变化值。有时对该值用相对满量程输入值之百分数表示,则称为分辨率。
(7)稳定性
有长期稳定性和短期稳定性之分,通常用长期稳定性,它是指在室温条件下,经相当长的时间间隔,传感器的输出与起始标定时的输出之间的差异。
(8)漂移
传感器在长时间工作时、外界温度改变时或外界出现干扰(冲击、振动、潮湿、电磁等)时等情况下输出量发生的变化,包括零点漂移和灵敏度漂移。零点漂移和灵敏度漂移又可以分为时间漂移和温度漂移,时间漂移是指在规定的条件下,零点和灵敏度随着时间的缓慢的变化;温度漂移为环境温度变化而引起的零点或灵敏度的变化。
(9)静态误差
传感器在其全量程内任一点的输出值与其理论值(拟合曲线)的偏离程度。是一项综合性指标,它基本上包括了前面叙述的非线性误差、迟滞误差、重复性误差、灵敏度误差等。
σ=(Σ(Δy i)2/(n-1))1/2
γ=±(3σ/y FS)100% 或
γ=±(γL2+γH2+γR2+γS2)1/2
1.4传感器的动态特性
动态特性是指传感器对随时间变化的输入量的响应特性。动态特性好的传感器,其输出量随时间变化的曲线与被测量随时间变化的曲线一致或者相近。
教学内容及步骤
动态特性的一般描述:
(1)阶跃响应特性
给传感器输入一个单位阶跃函数信号u(t)=
1
t
t
≤0
?
?
>0
?,其输出为阶跃响应特性。
与阶跃响应特性有关的指标:
最大超调量P
δ:输出超过稳定值的最大值,常用百分数来表示。
上升时间tr:输出由某一值(10%或5%)到达稳定值的90%(或95%)所需的时间。
响应时间ts:输出达到稳定值的95%或98%(由允许误差范围所决定)时所需的时间,也称建立时间或过渡过程时间。
延迟时间td:阶跃响应达到稳态值50%所需要的时间。
峰值时间tp:响应曲线到达第一个峰值所需要的时间。
时间常数τ:τ越小,响应速度越快。
衰减度:瞬态过程中振荡幅值衰减的速度。
1.5.2 动态数学模型
传感器的动态数学模型是指传感器在受到随时间变化的输入量作用时,输出输入之间的关系,通常称为响应特性。
(1)微分方程
将传感器作为线性定常系统来考虑,其动态数学模型可以用线性常系数微分方程来表示,这种方程式的通式为:
所谓线性系统就是在此方程式中不包含变量及其各阶微分的非一次幂项(包括交叉相乘项);如果线性系统方程中各系数a n、b m在工作过程中不随时间和输入量的变化而变化,那么该系统就称为线性定常系统。
(2)传递函数
对上式取拉氏变换,并令当t=0时,输入量x(t)和输出量y(t)及它们的各阶时间导数的初始值均为零,则得
等号右边是一个与输入量x(t)和输出量y(t)无关的表达式,它只与系统结构参数有关,因而等号右边又是传感器特性的一种表达式,它表征了输出与输入的关系,是一种描述传感器特性的函数。初始条件为零时(传感器被激励之前所有储能元件如质量块、弹性元件、电气元件均没有积存能量),输出量y(t)的拉氏
变换Y(s)与输入x(t)的拉氏变换X(s)之比,称为传递函数,并记为H(s)
1.6传感器的标定与校准
标定:是指在明确传感器的输出与输入关系的前提下,利用某种标准器具对传感器进行标度。
标定与校准的本质不同:对新研制或生产的传感器进行全面的技术检定,称为标定;将传感器在使用中或储存后进行的性能复测,称为校准。
(1)静特性的标定方法:静态标准条件:没有加速度、震动、冲击、环境温度20±5。C、相对湿度不大于85%、气压为101±7kPa。
(2)动态特性的实验确定方法:阶跃信号响应法、正弦信号响应法。
(3)常用标定设备:静态标定设备、动态标定设备、现场标定设备。1.7传感器技术发展
1.7.1改善传感器性能的技术途径
● 差动技术:显著地减少温度变化、电源波动、外界干扰的影响,抵消共模误差,减小非线性误差。
● 平均技术:误差δΣ=±δ0/n
● 补偿修正技术:本身特性修正、工作条件或外界环境修正,可以通过硬件或软件实现。
● 屏蔽、隔离与干扰抑制:
● 稳定性处理:时效处理、冰冷处理、永磁材料的时间老化温度老化、机械老化、交流稳磁处理、电气元件的老化筛选。
教案
单点温度的测量:
并联热电偶:测量平均温度
串联热电偶:输出电动势为每个热电动势之和。
在应用热电偶串、并联测温时,应注意两点:一、必须用同一分度号的热电偶;二、两热电偶的参考端温度相等。
2.2.4热电偶冷端温度补偿
1、冷端恒温修正法
因各种热电偶的分度关系是在冷端温度为0℃时得到的,如果测温热电偶的热端为t℃,冷端温度t<>0℃(t0>0℃),就不能用测得的E(t,t0)去查分度表得t,必须根据下式进行修正:
式中:E(t,0)--冷端为0℃而热端为t℃时的热电势;E(t, t0)--冷端为t0℃而热端为t℃时的热电势;E(t0,0)--冷端为0℃时应加的校正值。
2、仪表机械零点调整法
对于具有零位调整的显示仪表而言,如果热电偶冷端温度t0较为恒定时,可采用测温系统未工作前,预先将显示仪表的机械零点调整到t0℃上,这相当于把热电势修正值E(t0,0)预先加到了显示仪表上,当此测量系统投入工作后,显示仪表的示值就是实际的被测温度值。
3、补偿电桥法
当热电偶冷端处温度波动较大时,一般采用补偿电桥法,基测量线路如图3-1所示。补偿电桥法是利用不平衡电桥(又称冷端补偿器)产生不平衡电压来自动补偿热电偶因冷端温度变化而引起的热电势变化。
教案