摄像头工作原理详解
摄像头的工作原理
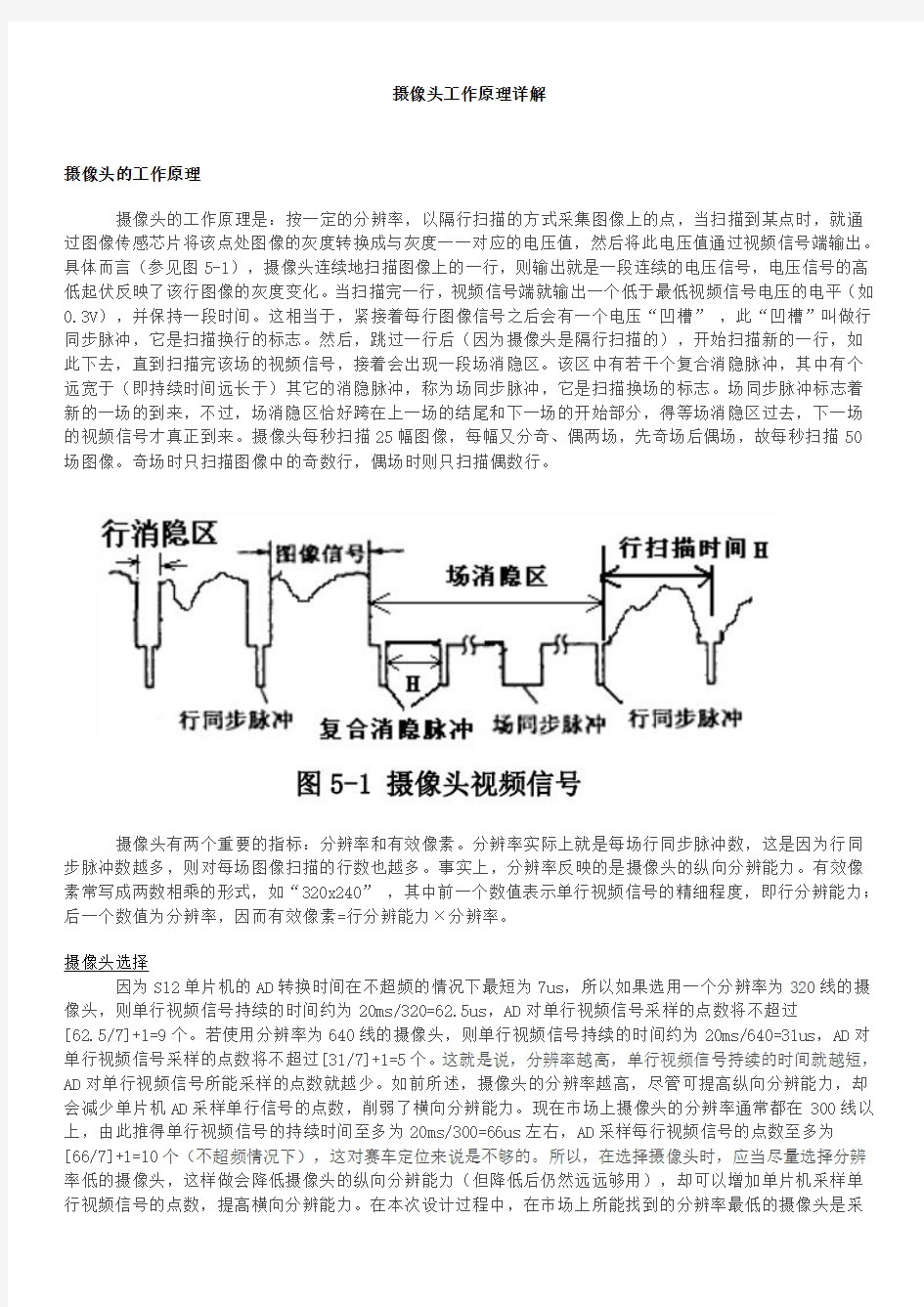
摄像头的工作原理是:按一定的分辨率,以隔行扫描的方式采集图像上的点,当扫描到某点时,就通过图像传感芯片将该点处图像的灰度转换成与灰度一一对应的电压值,然后将此电压值通过视频信号端输出。具体而言(参见图5-1),摄像头连续地扫描图像上的一行,则输出就是一段连续的电压信号,电压信号的高低起伏反映了该行图像的灰度变化。当扫描完一行,视频信号端就输出一个低于最低视频信号电压的电平(如0.3V),并保持一段时间。这相当于,紧接着每行图像信号之后会有一个电压“凹槽” ,此“凹槽”叫做行同步脉冲,它是扫描换行的标志。然后,跳过一行后(因为摄像头是隔行扫描的),开始扫描新的一行,如此下去,直到扫描完该场的视频信号,接着会出现一段场消隐区。该区中有若干个复合消隐脉冲,其中有个远宽于(即持续时间远长于)其它的消隐脉冲,称为场同步脉冲,它是扫描换场的标志。场同步脉冲标志着新的一场的到来,不过,场消隐区恰好跨在上一场的结尾和下一场的开始部分,得等场消隐区过去,下一场的视频信号才真正到来。摄像头每秒扫描25幅图像,每幅又分奇、偶两场,先奇场后偶场,故每秒扫描50
场图像。奇场时只扫描图像中的奇数行,偶场时则只扫描偶数行。
摄像头有两个重要的指标:分辨率和有效像素。分辨率实际上就是每场行同步脉冲数,这是因为行同步脉冲数越多,则对每场图像扫描的行数也越多。事实上,分辨率反映的是摄像头的纵向分辨能力。有效像素常写成两数相乘的形式,如“320x240” ,其中前一个数值表示单行视频信号的精细程度,即行分辨能力;后一个数值为分辨率,因而有效像素=行分辨能力×分辨率。
摄像头选择
因为S12单片机的AD转换时间在不超频的情况下最短为7us,所以如果选用一个分辨率为320线的摄像头,则单行视频信号持续的时间约为20ms/320=62.5us,AD对单行视频信号采样的点数将不超过
[62.5/7]+1=9个。若使用分辨率为640线的摄像头,则单行视频信号持续的时间约为20ms/640=31us,AD对单行视频信号采样的点数将不超过[31/7]+1=5个。这就是说,分辨率越高,单行视频信号持续的时间就越短,AD对单行视频信号所能采样的点数就越少。如前所述,摄像头的分辨率越高,尽管可提高纵向分辨能力,却会减少单片机AD采样单行信号的点数,削弱了横向分辨能力。现在市场上摄像头的分辨率通常都在300线以上,由此推得单行视频信号的持续时间至多为20ms/300=66us左右,AD采样每行视频信号的点数至多为
[66/7]+1=10个(不超频情况下),这对赛车定位来说是不够的。所以,在选择摄像头时,应当尽量选择分辨率低的摄像头,这样做会降低摄像头的纵向分辨能力(但降低后仍然远远够用),却可以增加单片机采样单行视频信号的点数,提高横向分辨能力。在本次设计过程中,在市场上所能找到的分辨率最低的摄像头是采
用1/3 Omni Vision CMOS为传感芯片的摄像头,其分辨率为320线。另外,为了使得视野大小合适,选用了3.6mm的镜头。以下章节中的视频采集工作就是基于此种摄像头的。
信号分离电路
要能有效地对视频信号进行采样,首先要处理好的问题是如何提取出摄像头信号中的行同步脉冲、消隐脉冲和场同步脉冲。这里有两种可行的方法。第一,直接通过单片机AD进行提取。因为行同步脉冲、消隐脉冲或场同步脉冲信号的电平低于这些脉冲以外摄像头信号的电平,所以据此可设定一个信号电平阈值来判断AD采样到的信号是否为上述三类脉冲。第二,就是给单片机配以合适的外围芯片,此芯片要能够提取出摄像头信号的行同步脉冲、消隐脉冲和场同步脉冲以供单片机作控制之用。
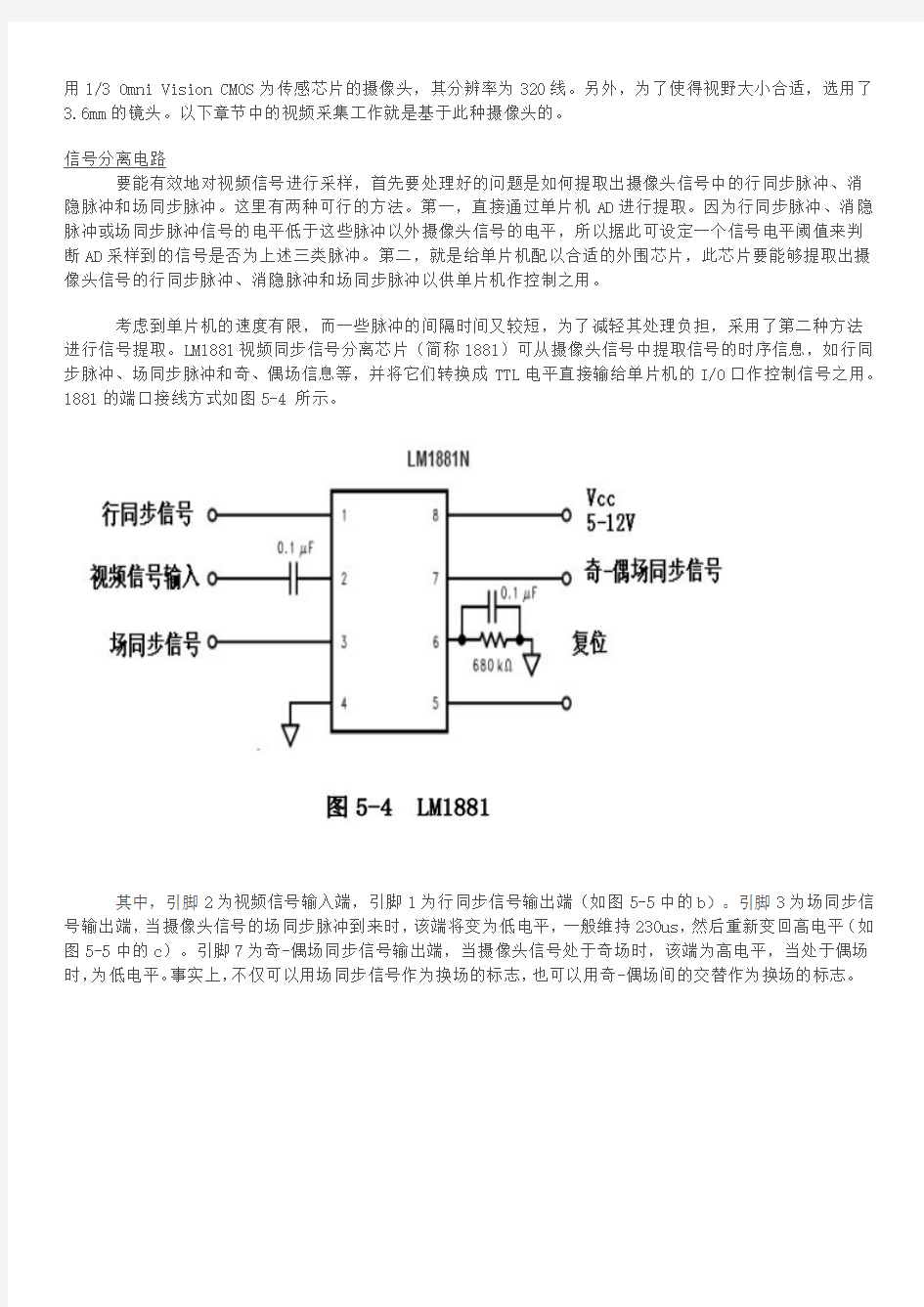
考虑到单片机的速度有限,而一些脉冲的间隔时间又较短,为了减轻其处理负担,采用了第二种方法进行信号提取。LM1881视频同步信号分离芯片(简称1881)可从摄像头信号中提取信号的时序信息,如行同步脉冲、场同步脉冲和奇、偶场信息等,并将它们转换成TTL电平直接输给单片机的I/O口作控制信号之用。1881的端口接线方式如图5-4 所示。
其中,引脚2为视频信号输入端,引脚1为行同步信号输出端(如图5-5中的b)。引脚3为场同步信号输出端,当摄像头信号的场同步脉冲到来时,该端将变为低电平,一般维持230us,然后重新变回高电平(如图5-5中的c)。引脚7为奇-偶场同步信号输出端,当摄像头信号处于奇场时,该端为高电平,当处于偶场时,为低电平。事实上,不仅可以用场同步信号作为换场的标志,也可以用奇-偶场间的交替作为换场的标志。
由1881及其外围电路构成的摄像头采样电路如图5-6 所示。摄像头视频信号端接1881的视频信号输入端,同时也接入S12的一路AD转换端口(选用AD0)。1881的行同步信号端(引脚1)接入外部中断引脚(IRQ),同时将LM1881的场同步信号和奇-偶场同步信号输入到ECT模块中(选用PT1,PT2),这样,既可以采用查询方式获取奇偶场信号跳变,又可以采用脉冲捕捉方式获取电平变化。通过这样的接线,为软件开发提供了多种选择的机会,使程序更加灵活。
手机拍照内存大学问:摄像头参数解读 随着智能手机的普及和不断升级,用户对于手机拍照画质也就越来越高,好的拍照画质就离不开出色的手机摄像头配置,而目前市面上手机摄像头的规格众多,参数各不相同,怎么去看这些名词和参数来挑选好的拍照手机呢?下面让我们一起来简单学习一下。 2000年11月,夏普联合日本当时第三大移动运营商J-photo推出了全球第一款拍照手机,像素仅有11万。时至今日,手机拍照已经成为手机必不可少的一个功能,手机摄像头历经多年发展,也已经不可同日而语。 随着智能手机的普及和不断升级,用户对于手机拍照画质也就越来越高,好的拍照画质就离不开出色的手机摄像头配置,而目前市面上手机摄像头的规格众多,参数各不相同,怎么去看这些名词和参数来挑选好的拍照手机呢?下面让我们一起来简单学习一下。 手机摄像头的结构和工作原理 拍摄景物通过镜头,将生成的光学图像投射到传感器上,然后光学图像被转换成电信号,电信号再经过模数转换变为数字信号,数字信号经过DSP加工处理,再被送到手机处理器中进行
处理,最终转换成手机屏幕上能够看到的图像。 手机摄像头的简单结构 手机摄像头的工作流程 由于手机摄像头的工作原理基本都相同,对于我们选择好的手机摄像头并不产生影响,我们只需要简单了解即可。 影响手机摄像头拍照画质的几个因素 1、传感器的类型 传感器是决定手机摄像头成像品质最为重要的一部份,也经常被手机厂商作为宣传的重点,厂商也习惯采用传感器的分类来对手机摄像头的类型进行分类。 常见的摄像头传感器类型主要有两种,一种是CCD传感器,一种是CMOS传感器。 CCD的优势在于成像质量好,但是制造工艺复杂,成本居高不下,特别是大型CCD价格非常高昂,且耗电高,并不适合在移动设备上使用。在相同分辨率下,CMOS价格比CCD便宜,
摄像头的工作原理大致为:景物通过镜头()生成的光学图像投射到图像传感器表面上,然后转为电信号,经过(模数转换)转换后变为数字图像信号,再送到数字信号处理芯片()中加工处理,再通过接口传输到电脑中处理,通过显示器就可以看到图像了。 注:图像传感器()是一种半导体芯片,其表面包含有几十万到几百万的光电二极管。光电二极管受到光照射时,就会产生电荷。 注:数字信号处理芯片( )功能:主要是通过一系列复杂的数学算法运算,对数字图像信号参数进行优化处理,并把处理后的信号通过等接口传到等设备。 结构框架: . ( )(镜像信号处理器) . (图像解码器) . (设备控制器) 摄像头的构成主要包括主控芯片、感光芯片、镜头和电源。好的电源也是保证摄像头工作的一个方面。摄像头镜头:五玻镜头是主流 这个问题对于大多数人来说已经不算问题了,笔者提出来也只是仅对小白而言。简单的说镜头是由透镜组成,摄像头的镜头一般是由玻璃镜片或者塑料镜片组成的。玻璃镜头能获得比塑料镜头更清晰的影像。这是因为光线穿过普通玻璃镜片通常只有~的光损失,而塑料镜片的光损失高达~。有些镜头还采用了多层光学镀膜技术,有效减少了光的折射并过滤杂波,提高了通光率,从而获得更清晰影像。
然而,现在很多小厂,为了节约成本、追求高利润,往往减少镜片的数量,或者使用廉价的塑料镜头。虽然这些产品在价格上便宜不少,看上去很有吸引力,但实际的成像效果却实在是令人无法恭维。现在市面上大多数摄像头采用的都是五玻镜头,但是不乏少数商家将塑料镜头说成五玻镜头的。因此消费者在选购一些杂牌摄像头时,一定要详细试用一下,谨防上当受骗。 另外,镜头还有一个重要的参数那就是光圈,通过调整光圈可以控制通过镜头到达传感器的光线的多少,除了控制通光量,光圈还具有控制景深的功能,即光圈越大,则景深越小 摄像头感光器件:一定比好吗? 在选择摄像头时,镜头是很重要的。按感光器件类别来分,现在市场上摄像头使用的镜头大多为和两种,其中(,电荷耦合组件)因为价格较高更多是应用在摄像、图象扫描方面的高端技术组件,(-,附加金属氧化物半导体组件)则大多应用在一些低端视频产品中。
智能汽车自主驾驶 控制系统
智能汽车自主驾驶控制系统 文献综述 姓名:杨久州班级:机电一班学号: 7631 前言 20 世纪末以来,随着世界智能交通系统(ITS)和无人化武器装备系统的发展,共同对新一代智能交通工具提出了迫切的需求。智能车辆技术迅速成为具有前瞻性的高新技术研究课题,受到了学术界和企业界的广泛关注。当前,智能交通系统(ITS)作为一个能够较好地解决世界性的交通拥堵、大量的燃油消耗和污染问题的先进体系吸引了大量学者的关注。一般来说,ITS 由智能车辆、运营车辆管理系统、旅行信息系统和交通监控系统组成,智能车辆作为其核心部分,扮演着至关重要的角色。没有高度发达的智能车辆技术,就不能实现真正意义上的智能交通系统。 智能车辆(Intelligent Automotive),又称自主车辆(Autonomous Vehicle)或无人地面车辆(UGV),集成了车辆技术、传感技术、人工智能、自动控制技术、机电一体化和计算机技术等多学科强交叉科学技术,它的发展水平反映了一个国家的工业实力。在近十年间,智能车辆技术的研究吸引了世界范围内大量高校、企业以及相关科学家的关注,各国政府和军事部门也对其表现出强烈的兴趣,智能车辆技术因此在短期内得到了飞跃性的
发展。 1.智能汽车自主驾驶技术的发展现状 汽车自主驾驶技术研究是从两个不同研究领域发展起来的。 从1%0年开始,为了改进汽车的操控性能,美国ohio大学的一些研究工作者开始进行汽车侧向跟踪控制和纵向跟踪控制研究,该项研究持续了二十多年,取得了一系列研究成果。 另一方面,二十世纪六十年代美国stanfoul研究所在进行人工智能研究中,开发了Shakey移动机器人,作为人工智能研究工作的试验平台。1973一1981年间由Hans.Moravec在Stanford研究所领导的stanford。art工程则第一次实现了自主驾驶。 进入二十世纪八十年代以后,军方和一些大型汽车公司对自主驾驶技术表现出了浓厚的兴趣。美国军方先后组织了多项车辆自主驾驶的研究项目,其中包括DARPA的ALV项目,DARPA的DEMo一H计划、DEMo一111计划等。这一系列的研究都试图将自主驾驶技术应用到军事上去,以提高部队战斗力。其它包括英国、法国、德国等在内的一些国家 也都在进行自主驾驶技术在军事应用领域的相关研究。大型汽车公司则更加注重汽车自主 驾驶研究,以期提高汽车性能。
工业职业技术学院 毕业设计 课题名称基于51与单片机的智能小车控制系统 系(院)名称电气工程系 专业及班级 学生 学号 指导教师
完成日期年11 月19 日
摘要 随着我国科学技术的进步,智能化作为现代社会的新产物开始越来越普及,各种高科技也广泛应用于智能小车和机器人玩具制造领域,使智能机器人越来越多样化。智能小车是一个多种高薪技术的集成体,它融合了机械、电子、传感器、计算机硬件、软件、人工智能等许多学科的知识,可以涉及到当今许多前沿领域的技术。 整个小车平台主要以51单片机为控制核心,通过无线遥控实现前进后退和转向行驶,通过红外线传感器,实现小车的自适应巡航、避障等功能。设计采用对比选择,模块独立,综合处理的研究方法。通过翻阅大量的相关文献资料,分析整理出有关信息,在此基础上列出不同的解决方案,结合实际情况对比方案优劣选出最优方案进行设计。从电机车体,最小系统到无线遥控,红外线对管的自动寻迹再到红外线自动避障和语音控制,完成各模块设计。通过调试检测各模块,得到正确的信号输出,实现其应有的功能。最后将各个调试成功的模块结合到小车的车体上,结合程序,通过单片机的控制,将各模块有效整合在一起,达到所预期的目标,完成最终设计与制作,能使小车在一定的环境中智能化运转。 关键字:智能小车,单片机,红外传感器。
目录 第一章绪论.............................................................................................................................- 1 - 1.1.1智能循迹小车概述........................................................................................................- 1 - 1.1.2课题研究的目的和意义 ...............................................................................................- 2 - 1.1.3智能循迹小车智能循迹分类.......................................................................................- 3 - 1.1.4智能循迹小车的应用....................................................................................................- 3 - 第二章方案设计 ..........................................................................................................................- 5 - 2.1 主控系统.........................................................................................................................- 5 - 2.2单片机最小系统 ...............................................................................................................- 6 - 2.2.1 STC89C52简介...................................................................................................- 6 - 2.2.2 时钟电路...............................................................................................................- 8 - 2.2.3复位及复位电路....................................................................................................- 8 - 2.3 电机驱动模块................................................................................................................ - 10 - 2.4 循迹及避障模块............................................................................................................ - 11 - 2.5 机械系统......................................................................................................................... - 11 - 2.6电源模块......................................................................................................................... - 11 - 第三章硬件设计 ..................................................................................................................... - 12 - 3.1总体设计......................................................................................................................... - 12 - 3.1.1主板设计框图..................................................................................................... - 12 - 主板设计框图如图3-1,所需原件清单如表3-1 .................................................. - 12 -
extern int left,w,top,h; extern HDC m_hdc; CBrush brush3(RGB(0,255,0)); CBrush brush4(RGB(255,0,0)); CBrush brush5(RGB(255,255,0)); #else #include
手机摄像头参数 1.结构、原理 2.像素, 像素是构成数码影像的基本单位,通常以像素的每英寸的PPI(pixels per inch)为单位来表示影像分辨率的大小。 从硬件方面来讲,如果传感器面积不变,而单纯提高像素,高像素密度的传感器相对对于低像素密度的传感器在拍照时更容易产生大量噪点 像素≠成像质量; 像素密度大→噪点多→影响清晰度 改善方法:增大单个感光像素面积→减小像素密度 3.传感器, CCD(成像好,价格高,功耗大,不适合手机) CMOS(大部分手机摄像头)分为:普通式、背照式、堆栈式。 普通与背照式区别 背照式对换了感光层与基质的位置,使感光层直接与透光面接触,减少了中间环
节光线的损失,并且在透光面上每个对应的像素表面都改为透镜的形式,更集中地汇聚了外界的光线到对应的像素点上,减少了像素之间多余的光线干扰(也简称增加了开口率)。在弱光环境下,提高约30%—50%的感光能力,能够在弱光下拍摄更高的质量的照片。(如下图) 搭载背照式摄像头的手机有 iPhone 4/4S、小米2S、魅族MX2、索尼LT26i等(如下图)
背照式与堆栈式区别 堆栈式实际是背照式的改良,原来传感器里的信号处理电路放到了原来的基板上(如下图) 优点; 1、在较小的芯片尺寸上行成大量的像素点,体积做到更小; 2、加入了RGBW的编码技术,就是是由原来的 R(红),G(绿),B(蓝) 三原色像素点中再加入W(白)像素点来提升画质, 3、堆栈式传感器更加支持硬件HDR功能,能够精确地单独控制每一 行像素的曝光时间,从而在传感器层面上就实现原生的高动态范 围渲染,有别于之前的软件HDR技术,照片生成的速度更快,而 且可以实现HDR录像。 使用堆栈式首款OPPO Find 5(如下图) 4、镜头参数 4.1焦距, 焦距是指从镜头的透镜中心到成像面(也就是感光元件)的距离(如下图)。
JMK MODEL: JK-316 1/4 索尼高清CCD 内置自动变焦、自动光圈镜头 16倍光学变焦镜头 12倍数字变焦 可调视频传输距离(3步骤) 最低照度:0.001 Lux(DSS) RS-485协议and PTZ 控制器接口 监控摄像头的分类 分类包括: 枪形摄像机 半球形摄像机 一体化摄像机 红外摄像机 智能高速球型摄像机 智能中速球型摄像机 数字视频会议摄像机 微型针 从色彩分为:彩色,黑白,彩转黑从外形分为:枪击,半球,球机从原理分为:模拟,数字
摄像头工作原理 摄像头的工作原理大致为:景物通过镜头(LENS)生成的光学图像投射到图像传感器表面上,然后转为电信号,经过A/D(模数转换)转换后变为数字图像信号,再送到数字信号处理芯片(DSP)中加工处理,再通过USB接口传输到电脑中处理,通过显示器就可以看到图像了。 注1:图像传感器(SENSOR)是一种半导体芯片,其表面包含有几十万到几百万的光电二极管。光电二极管受到光照射时,就会产生电荷。 注2:数字信号处理芯片DSP(DIGITAL SIGNAL PROCESSING)功能:主要是通过一系列复杂的数学算法运算,对数字图像信号参数进行优化处理,并把处理后的信号通过USB等接口传到PC等设备。 DSP结构框架: 1. ISP(image signal processor)(镜像信号处理器) 2. JPEG encoder(JPEG图像解码器) 3. USB device controller(USB设备控制器) 摄像头的构成主要包括主控芯片、感光芯片、镜头和电源。好的电源也是保证摄像头工作的一个方面。 摄像头镜头:五玻镜头是主流 这个问题对于大多数人来说已经不算问题了,笔者提出来也只是仅对小白而言。简单的说镜头是由透镜组成,摄像头的镜头一般是由玻璃镜片或者塑料镜片组成的。玻璃镜头能获得比塑料镜头更清晰的影像。这是因为光线穿过普通玻璃镜片通常只有5%~9%的光损失,而塑料镜片的光损失高达11%~20%。有些镜头还采用了多层光学镀膜技术,有效减少了光的折射并过滤杂波,提高了通光率,从而获得更清晰影像。
智能小车控制系统设计 ——ARM控制模块设计 EasyARM615是一款基于32位ARM处理器,集学习和研发于一体的入门级开发套件,该套件采用Luminary Micro(流明诺瑞)公司生产的Stellaris系列微控制器LM3S615。本系统设计是以EasyARM615开发板为核心,通过灰度传感器检测路面上的黑线,运用PWM直流电机调速技术,完成对小车运动轨迹等一系列的控制。同时利用外扩的液晶显示器显示出各个参数。以达到一个简易的智能小车。 本文叙述了系统的设计原理及方法,讨论了ISR集成开发环境的使用,系统调试过程中出现的问题及解决方法。 据观察,普通的玩具小车一般需要在外加条件下才能按照自己的的设想轨迹去行驶,而目前可借助嵌入式技术让小车无需外加条件便可完成智能化。在小车行驶之前所需作的准备工作是在地面上布好黑线轨迹,设计好的小车便可按此黑线行驶,即为智能小车。其设计流程如下: 1、电机模块 采用由达林顿管组成的H型PWM电路。PWM电路由四个大功率晶体管组成,H桥电路构成,四个晶体管分为两组,交替导通和截止,用单片机控制达林顿管使之工作在开关状态,根据调整输入控制脉冲的占空比,精确调整电机转速。这种电路由于管子工作只在饱和和截止状态下,效率非常没。H型电路使实现转速和方向的控制简单化,且电子开关的速度很快,稳定性也极强,是一种广泛采用的PWM调整技术。 具体电路如下图所示。本电路采用的是基于PWM原理的H型驱动电路。该电路采用TIP132大功率达林顿管,以保证电动机启动瞬间的8安培电流要求。
2、传感器模块 灰度测量模块,是一种能够区分出不同颜色的的电子部件。灰度测量模块是专为机器人设计的灰度传感器。例如:沿着黑色轨迹线行走,不偏离黑色轨迹线;沿着桌面边沿行走,不掉到地上,等等。足球比赛时,识别场地中灰度不同的地面,以便于进行定位。不同的物体对红外线的反射率不同,黑色最低,白色最高;它通过发射红外线并测量红外线被反射的强度来输出反映物体颜色的电压信号,有效距离3-30毫米。 其技术规格如下: 已知灰度传感器的输出电压为0-3.3V,所以可通过ARM615开发板上的ADC 模块转换成数字信号,最后通过不断测试得出黑线与白线的大概参数值,完成对小车传感器部分的设计。 在本次设计中选择二个灰度传感器,其实现效果与布局如下所示。
高速摄像机是一种能够以小于1/1000秒的曝光或超过每秒250帧的帧速率捕获运动图像的设备。高速摄像机用于将快速移动的物体作为照片图像记录到存储介质上。录制后,存储在媒体上的图像可以慢动作播放。早期的高速摄像机使用胶片记录高速事件,但被完全使用电荷耦合器件(CCD)或CMOS有源像素传感器的电子设备取代,通常每秒超过1000帧记录到DRAM上,慢慢地回放研究瞬态现象的科学研究动作。 摄像机种类繁多,其工作的基本原理都是一样的:把光学图象信号转变为电信号,以便于存储或者传输。当我们拍摄一个物体时,此物体上反射的光被摄像机镜头收集,使其聚焦在摄像器件的受光面(例如摄像管的靶面)上,再通过摄像器件把光转变为电能,即得到了“视频信号”。光电信号很微弱,需通过预放电路进行放大,再经过各种电路进行处理和调整,最后得到的标准信号可以送到录像机等记录媒介上记录下来,或通过传播系统传播或送到监视器上显示出来。
高速摄像机可以在很短的时间内完成对高速目标的快速、多次采样,当以常规速度放映时,所记录目标的变化过程就清晰、缓慢地呈现在我们眼前。高速摄像机技术具有实时目标捕获、图像快速记录、即时回放、图像直观清晰等突出优点。 工作原理 高速运动目标受到自然光或人工辅助照明灯光的照射产生反射光,或者运动目标本身发光,这些光的一部分透过高速成像系统的成像物镜。经物镜成像后,落在光电成像器件的像感面上,受驱动电路控制的光电器件,会对像感面上的目标像快速响应,即根据像感面上目标像光能量的分布,在各采样点即像素点产生响应大小的电荷包,完成图像的光电转换。带有图像信息的各个电荷包被迅速转移到读出寄存器中。读出信号经信号处理后传输至电脑中,由电脑对图像进行读出显示和判读,并将结果输出。因此,一套完整的高速成像系统由光学成像、光电成像、信号传输、控制、图像存储与处理等几部分组成。 高速摄像在流体力学中的应用 高速摄像在工业应用中应用广泛,高速摄像机能拍摄到肉眼无法看清楚的图像和运动过程。流体力学中的湍流、流体的流速、流场、气泡、沸腾、两相流等运动规律的观察和分析更是少不了高速摄像机的参与。如用高速摄像拍摄的石头进入水中一刹那的细节。通过高速摄像机影像,研究人员能够了解石头水下的受力情况,并通过流体动力学,分析出为何石头能在水面上连续多次漂浮。 武汉中创联达科技有限公司,专业从事光电子影像产品(低照度相机、高速摄像机,超高速摄像机,高分辨率相机及其图像分析软件)的销售、研发,提供特殊环境下的拍摄、成像服务。经过多年的市场经验及技术积累,公司为国内
第八届“飞思卡尔”杯全国大学生 智能汽车竞赛 技术报告 学校:北京邮电大学 队伍名称:北邮摄像头一队 参赛队员:何映材 邬仲钧 刘涛 带队教师:高荔
技术报告和研究论文使用授权的说明 本人完全了解第八届“飞思卡尔”杯全国大学生智能汽车邀请赛关保留、使用技术报告和研究论文的规定,即:参赛作品著作权归参赛者本人,比赛组委会和飞思卡尔半导体公司可以在相关主页上收录并公开参赛作品的设计方案、技术报告以及参赛模型车的视频、图像资料,并将相关内容编纂收录在组委会出版论文集中。 参赛队员签名:何映材 邬仲钧 刘涛 带队教师签名: 日期:
目录 第一章设计概览 (4) 1 设计概述 (4) 1.1 整车设计思路 (4) 1.2 车模整体造型 (4) 图1.2车模整体造型 (5) 第二章硬件设计 (6) 2 硬件设计 (6) 2.1 机械结构 (6) 2.1.1舵机改装 (6) 2.1.2电池固定 (6) 2.1.3电机定位 (7) 2.1.4底盘固定 (7) 2.1.5差速调节 (7) 2.2 硬件电路 (7) 2.2.1电源设计 (7) 2.2.2电池电压检测模块 (8) 2.2.3驱动电路设计 (9) 2.3 摄像头选型 (9) 第三章系统软件设计 (10) 3 软件设计 (10) 3.1 程序整体设计 (10) 3.2 图像提取与处理 (11) 3.3 控制策略 (13) 3.3.1整体控制 (13) 3.3.2PID算法的引入与改进 (13) 3.3.3增量式or位置式 (15) 第四章调试工具 (16) 4 调试工具 (16) 第五章总结 (17) 5 总结 (17) 第六章车模参数 (18) 6 车模规格 (18) 参考文献 (18) 附录 (19)
目录 1、手机镜头产业链及发展历程 (1) 1.1手机镜头工作原理 (1) 1.2手机镜头产业链 (1) 1.3镜头产业技术演进历程 (3) 1.4手机摄像头发展趋势---注重画质与轻薄化 (5) 2、镜头行业市场规模情况 (7) 2.1近几年镜头市场概况 (7) 2.2近年来市场容量快速增长的因素分析 (10) 2.2.1因素一:搭载率上升与出货量上升 (10) 2.2.2因素二:高像素使用比例的提升 (10) 2.3棱镜市场规模测算 (12) 3、镜头产业链主要厂家与最新动态 (13) 3.1蓝玻璃滤光片市场 (13) 3.1.1 蓝玻璃滤光片的快速发展 (13)
3.1.2 蓝玻璃滤光片的相关公司情况 (14) 3.2棱镜市场 (17) 3.2.1片数增加、工艺难度变高 (17) 3.2.2棱镜厂商情况 (17) 3.3 CMOS传感器市场 (19) 3.3.1 产业集中化,寡头优势明显 (19) 3.3.2 四大厂商垄断市场,其他厂商难以介入 (20) 3.4 镜头模组市场 (21) 3.4.1模组封装发展趋势 (21) 3.4.2模组市场三大阵营技术差距明显 (25) 概要 2012年,手机镜头中棱镜的市场规模约为70亿元,其中5M以上的市场占70%左右,且有持续上升的趋势。算上其他用途的棱镜头(平板电脑、汽车、电视等)市场约100亿。 根据IDC预计,2011-2016全球2011-2016年智能手机的出货量综合增长率约20.5%。中低端的智能手机增长率快于高端手机。如果算上搭载率的提升以及高像素的使用比例提升,手机镜头中棱镜的市场规模预计复合增长率预计在30%以上,2016
摄像头的工作原理大致为:景物通过镜头(LENS)生成的光学图像投射到图像传感器表面上,然后转为电信号,经过A/D(模数转换)转换后变为数字图像信号,再送到数字信号处理芯片(DSP)中加工处理,再通过USB 接口传输到电脑中处理,通过显示器就可以看到图像了。 注1:图像传感器(SENSOR)是一种半导体芯片,其表面包含有几十万到几百万的光电二极管。光电二极管受到光照射时,就会产生电荷。 注2:数字信号处理芯片DSP(DIGITAL SIGNAL PROCESSING)功能:主要是通过一系列复杂的数学算法运算,对数字图像信号参数进行优化处理,并把处理后的信号通过USB等接口传到PC等设备。 DSP结构框架: 1. ISP(image signal processor)(镜像信号处理器) 2. JPEG encoder(JPEG图像解码器) 3. USB device controller(USB设备控制器) 摄像头的构成主要包括主控芯片、感光芯片、镜头和电源。好的电源也是保证摄像头工作的一个方面。摄像头镜头:五玻镜头是主流 这个问题对于大多数人来说已经不算问题了,笔者提出来也只是仅对小白而言。简单的说镜头是由透镜组成,摄像头的镜头一般是由玻璃镜片或者塑料镜片组成的。玻璃镜头能获得比塑料镜头更清晰的影像。这是因为光线穿过普通玻璃镜片通常只有5%~9%的光损失,而塑料镜片的光损失高达11%~20%。有些镜头还采用了多层光学镀膜技术,有效减少了光的折射并过滤杂波,提高了通光率,从而获得更清晰影像。
然而,现在很多小厂,为了节约成本、追求高利润,往往减少镜片的数量,或者使用廉价的塑料镜头。虽然这些产品在价格上便宜不少,看上去很有吸引力,但实际的成像效果却实在是令人无法恭维。现在市面上大多数摄像头采用的都是五玻镜头,但是不乏少数商家将塑料镜头说成五玻镜头的。因此消费者在选购一些杂牌摄像头时,一定要详细试用一下,谨防上当受骗。 另外,镜头还有一个重要的参数那就是光圈,通过调整光圈可以控制通过镜头到达传感器的光线的多少,除了控制通光量,光圈还具有控制景深的功能,即光圈越大,则景深越小 摄像头感光器件:CCD一定比CMOS好吗? 在选择摄像头时,镜头是很重要的。按感光器件类别来分,现在市场上摄像头使用的镜头大多为CCD 和CMOS两种,其中CCD(Charge Coupled Device,电荷耦合组件)因为价格较高更多是应用在摄像、图象扫描方面的高端技术组件,CMOS(Complementary Metal-Oxide Semiconductor,附加金属氧化物半导体组件)则大多应用在一些低端视频产品中。
智能车速度控制系统的设计与实现 引言 在智能车竞赛中,速度控制不能采用单纯的PID,而要采用能够在全加速、紧急制动和闭环控制等多种模式中平稳切换的“多模式”速度控制算法,才能根据不同的道路状况迅速准确地改变车速,实现稳定过弯。 系统硬件设计 按照竞赛要求,本文设计的智能车速度控制系统,以飞思卡尔 MC9S12DG128 单片机为核心[1],与车速检测模块、直流电机驱动模块、电源模块等一起构成了智能车速度闭环控制系统。单片机根据赛道信息采用合理的控制算法实现对车速的控制,车速检测采用安装于车模后轴上的光电编码器,直流电机驱动采用了由四个MOS管构成的H桥电路如图1所示,电源模块给单片机、光电编码器和驱动电机等供电。 系统建模 一个针对实际对象的控制系统设计,首先要做的就是对执行器及系统进行建模,并标定系统的输入和输出。为了对车速控制系统设计合适的控制器,就要对速度系统进行定阶和归一化[2]。对此,分别设计了加速和减速模型测定实验。通过加装在车模后轮轴上的光电编码器测量电机转速。编码器齿轮与驱动轮的齿数比为33/76,编码器每输出一个脉冲对应智能车运动1.205mm。车模可以通过调节加给电机的PWM波的占空比进行调速。单片机上的PWM模块可以是8位或16位的,为了提高调速的精度,电机调速模块选用16位PWM,其占空比调节范围从0到65535,对应电机电枢电压从0%到100%的电池电压。 将车模放置在一段长直跑道上,采用开环方式给驱动电机加上不同的电压,记录车模在速度进入稳定后的速度值。然后将所测得的电枢电压与车速进行拟合的曲线如图2所示,由图1可将智能车加速模型近似为线性模型。 根据实验数据可以确定车速执行器系统的零点和增益。车速V与占空比PWM_Ratio的关系见公式1: V = PWM_Ratio×402 + 22000 (1) 其中:PWM_Ratio的取值范围为0-65535 车模减速有三种方法:自由减速、能耗制动和反接制动。自由减速动力来自摩擦阻力,基本认为恒定。能耗制动是将能量消耗到电机内阻上,制动力随着车速的降低而降低,也可通过控制使加速度减小得更快。反接制动通过反加电压实现,制动力与所加的反向电压有关。
智能车摄像头图像畸变矫正的研究 甄红涛;齐晓慧;白勇博 【期刊名称】《信息技术》 【年(卷),期】2011(035)001 【摘要】The geometric model of smart car camera is built, and the truth of image distortion is discussed. Against the longitudinal distortion and transversal distortion, non-uniform lines collection and linear compensating are proposed, and the conversion of coordinates formula is deduced. The experiment result shows that this image rectifying method is efficient and can supply accurate image information to extract routing parameter for smart car. For the simple theory, high adaptability and ideal effect of this method, it has high-use value on engineering implementation.%建立了智能车摄像头成像的几何模型,并对图像畸变原理进行了分析,针对图像的纵向畸变和横向畸变分别提出了非均匀行采集和线性补偿的矫正方法,并推导出了坐标变换公式.实验证明,这种方法能够对摄像头图像进行有效矫正,为智能车导航路径参数的提取提供了准确的图像信息.该方法原理简单,适应性强,效果理想,在工程上具有较高的实用价值. 【总页数】4页(52-55) 【关键词】智能车;图像矫正;非均匀行采集 【作者】甄红涛;齐晓慧;白勇博 【作者单位】军械工程学院光学与电子工程系,石家庄,050003;军械工程学院光学与电子工程系,石家庄,050003;军械工程学院光学与电子工程系,石家
无线WiFi 视频监控系统设计与实施无线远程视频监控系统由站点(视频采集设备、无线 视频监控终端)、接入点(AP)、视频服务器组成。作为无线WiFi 视频监控系统的移动终端,首先对无线网络摄像机进行无线设置。本系统以凯聪品牌摄像头为例进行操作介绍。 (1)搜索并配置局域网下的网络摄像机。在组网中可以直接登录无线路由器来查看与无线路由器连接的网络摄像头的IP,这样就很方面的找到需要的IP 地址。 (2)局域网监控。在通过无线路由器查看到IP 之后,在默认浏览器中输入网络摄像头的IP 地址,会弹出一个登陆框,填入摄像机的登陆用户名和登陆密码,登陆网络摄像机。登陆成功后既可以看到监控画面了。 (3)无线设置。要实现摄像头的无线功能,必须先对摄像头进行设置,同时也需要对无线路由器进行设置。登陆路由器,进入路由器的“无线设置”下的“基本设置”,查看路由器的SSID (ServiceSet Identifier,服务集标识符)。在浏览器中登陆摄像机后,设置与路由器SSID 的绑定,以确保摄像头每次都能连接到指定路由器。 (4)语音和录像设置。网络摄像机自带拾音器,只要外接一个小音箱后,就可以启用语音功能。登陆摄像机后,启用摄像机的
双向语音和录像功能。网络摄像机的操作界面,可以对摄像机进行操作,转到云台和录像等,同时也可以在IE 中显示摄像机当前的时间以及摄像机的名称。 (5)多画面视频监控。完成单画面的视频监控画面后,要实现多画面的视频监控需要对无线网络摄像机进行设置,选择设备管理里的多路设备设置,添加一路设备的信息,输入需要添加的网络摄像机的IP,重启后,重新进去监控画面,选择设备状态,即可选择多路视频监控,多画面的监控。 (6)远程登录控制。远程登陆监控是一种IP 映射技术,需要用到网络地址转换(NAT)技术。NAT 允许网络应用程序对它们是否位于一个具有UPnP(通用即插即用)能力的NAT 设备之后进行检测,然后这些程序将获得共享的全球可 用路由的IP 地址。本系统的网络摄像机内嵌UPnP 协议, 只要路由器中打开“UPnP”,就可以在远程电脑浏览器地 址栏中输入摄像机自带的域名登陆网络摄像机了。
USB摄像头的工作原理 2010-04-06 15:03 摄像头的工作原理 摄像头的工作原理大致为:景物通过镜头(LENS)生成的光学图像投射到图像传感器表面上,然后转为电信号,经过A/D(模数转换)转换后变为数字图像信号,再送到数字信号处理芯片(DSP)中加工处理,再通过USB接口传输到电脑中处理,通过显示器就可以看到图像了。 注1:图像传感器(SENSOR)是一种半导体芯片,其表面包含有几十万到几百万的光电二极管。光电二极管受到光照射时,就会产生电荷。 注2:数字信号处理芯片DSP(DIGITAL SIGNAL PROCESSING)功能:主要是通过一系列复杂的数学算法运算,对数字图像信号参数进行优化处理,并把处理后的信号通过USB等接口传到PC等设备。 DSP结构框架: 1. ISP(image signal processor)(镜像信号处理器) 2. JPEG encoder(JPEG图像解码器) 3. USB device controller(USB设备控制器) 四、摄像头的主要结构和组件 从摄像头的工作原理就可以列出摄像头的主要结构和组件: 1、主控芯片(详情请参阅:《影响摄像头的关键
元器件是什么?》) 2、感光芯片(详情请参阅:《影响摄像头的关键元器件是什么?》) 3、镜头(详情请参阅:《影响摄像头的关键元器件是什么?》) 4、电源 摄像头内部需要两种工作电压:3.3V和2.5V,因此好的摄像头内部电源也是保证摄像头稳定工作的一个因素。 五、摄像头的一些技术指标 1、图像解析度/分辨率(Resolution): ●SXGA(1280 x1024)又称130万像素 ●XGA(1024 x768)又称80万像素 ●SVGA(800 x600)又称50万像素 ●VGA(640x480)又称30万像素(35万是指648X488) ●CIF(352x288) 又称10万像素 ●SIF/QVGA(320x240) ●QCIF(176x144) ●QSIF/QQVGA(160x120) 2、图像格式(image Format/ Color space) RGB24,I420是目前最常用的两种图像格式。 ●RGB24:表示R、G、B三种颜色各8bit,最多可表现256级浓淡, 从而可以再现256*256*256种颜色。 ●I420:YUV格式之一。 ●其它格式有: RGB565,RGB444,YUV4:2:2等。 3、自动白平衡调整(AWB) 定义:要求在不同色温环境下,照白色的物体,屏幕中的图像应也是白色的。 色温表示光谱成份,光的颜色。色温低表示长波光成分多。 当色温改变时,光源中三基色(红、绿、蓝)的比例会发生变化, 需要调节三基色的比例来达到彩色的平衡,这就是白平衡调节的实际。 4、图像压缩方式 JPEG:(joint photographic expert group)静态图像压缩方式。 一种有损图像的压缩方式。压缩比越大,图像质量也就越差。当图像精度要求 不高存储空间有限时,可以选择这种格式。目前大部分数码相机都使用JPEG格式。 5、彩色深度(色彩位数) 反映对色彩的识别能力和成像的色彩表现能力,实际就是A/D转换器的量
扬州大学能源与动力工程学院课程设计报告总结 题目:智能小车运动控制系统 课程:电子技术综合课程设计 专业:测控技术与仪器 班级: 学号: 姓名: 指导教师: 完成日期:
《电子技术综合课程设计》任务书 一、课程设计的目的 本课程实在学完《模拟电子技术基础》、《数字电子技术基础》之后,集中两周时间,进行的复杂程度较高、综合性较强的设计课题的实做训练。主要包括:方案论证,系统电路分析、单元功能电路设计、元器件选择、安装调试、计算机辅助设计、系统综合调试与总结等。通过本课程设计可培养和提高学生的科研素质、工程意识和创新精神。真正实现了理论和实际动手能力相结合的教学改革要求。 二、课程设计的要求 1、加强对电子电路的理解,学会查寻资料、方案比较,以及设计计算等环节,进一步调高分析解决实际问题的能力。 2、独立开展电路实验,锻炼综合应用所学电子技术知识,分析、解决电子电路问题的实际本领,真正实现由知识向技能的转化。 3、独立书写课程设计报告,报告应能正确反映设计思路和原理,反映安装、调试中解决各路问题。 三、课程设计进度安排
目录 1、任务及要求 (4) 2、整体方案设计 (5) 2.1 各器件模块说明 (5) 2.2 系统控制框图 (6) 3、程序编写与设计 (7) 3.1 主控芯片模块程序设计及仿真波形 (7) 3.2 PWM模块程序设计及仿真波形 (9) 3.3 运动控制模块程序设计及仿真波形 (10) 3.4 系统总的设计图 (12) 4、最终成果 (13) 5、心得体会 (14) 6、参考文献 (16) 7、附录 (16)
1.任务及要求 任务:(1)小车可完成启动、停止控制; (2)小车可完成前进、后退、转向等行驶方向; (3)小车可完成调速控制行驶; (4)可通过遥控器控制小车的运行。 要求:(1)课题要求用可编程逻辑器件(CPLD/FPGA)设计实现; (2)在试验箱上或印刷电路板上安装、调试出所设 计的电路; (3)在EDA编程实验系统上完成硬件系统的功能仿 真; (4)写出设计、调试、总结报告。
本帖最后由 superyongzhe 于 2009-11-16 23:24 编辑 我想大家肯定还遇到一个问题,那就是如何知道自己采集的图像是否正确呢?可以使用串 口,大家把我那个程序里面的printp.c 复制到你的工程里,再把includes.h里面的声明添加到你的程序里,在串口初始化程序里 设置好波特率(如何设置可参考《单片 机嵌入式在线开发方法》一书中的相关内容,也可以看芯片资料)。上位机可以使用“串口 助手就可以了”,很简单的。如果大 家还有什么问题就赶快提出来把,我尽量给大家解决,因为这里面前车的东西比较繁杂,我 一下说不清楚。最好有个电视机,能 够看到摄像头摄在那里,这样会更容易校对 近几天看到论坛里有很多网友遇到CCD图像采集的麻烦,我在最开始的时候也为这个烦恼过,由于本人比较菜,在度过大概半个月的绝望日夜后,在刚准备放弃时突然发现我已经采集到正确的图像了。特再次分享,希望能解决大家当前遇到的麻烦。 在采集图像之前,我们首先要知道摄像头输出信号的特性。目前的模拟摄像头一般都是PAL制式的,输出的信号由复合同步信号,复合消隐信号和视频信号。其中的视频信号才是真正的图像信号,对于黑白摄像头,图像越黑,电压越低,图像越白,电压越高。而复合同步信号是控制电视机的电子枪对电子的偏转的,复合消隐信号是在图像换行和换场时电子枪回扫时不发射电子。由于人眼看到的图像大于等于24Hz时人才不会觉得图像闪烁,所以PAL 制式输出的图像是25Hz,即每秒钟有25幅画面,说的专业点就是每秒25帧,其中每一帧有625行。但由于在早期电子技术还不发达时,电源不稳定,容易对电视信号进行干扰,而交流电源是50Hz所以,为了和电网兼容,同时由于25Hz时图像不稳定,所以后来工程师们把一副图像分成两场显示,对于一幅画面,一共有625行,但是电子枪先扫描奇数场1,3,5.....,然后再扫描2,4,6.....,所以这样的话,一副图像就变成了隔行扫描,每秒钟就有50场了。其中具体的细节请参考这个网站 电视原理与系统 /zjx/zjx09/zjx090000.htm 只用看前面的黑白全电视信号和PAL制式就可以了(当然如果感兴趣可以全部看完)。 通过上面的内容如果你对PAL制式信号了然于心,那么就可以开始图像的采集了,PAL 输出的信号有复合同步信号,复合消隐信号和视频信号。那么我们首先就是要从这三种信号中分理出复合同步信号,复合消隐信号和视频信号,以便我们对AD采样到的值进行存储,