基于智能手机远程控制的移动机器人设计
摘要:家庭监控系统监控范围一般多为固定区域,存在监控死角的弊端,如采用商用监控,则价格昂贵,为提高家庭监控安全性和适用性,设计一款基于智能手机远程控制的移动机器人,不仅可以实现远程实时监控,避免监控死角,而且采用万向轮的移动平台,可以实现在有限空间内的灵活移动。
0 引言
家庭监控安防系统主要是利用网络技术将安装在室内的视频、音频、报警等监控设备连接起来,提高家庭安全防护能力[1, 2]。现用的家庭监控系统多采用一组或多组摄像头、监控器和中央存储器组成。其摄像头一般都为固定安装,可旋转一定角度,因此,覆盖范围有限。而由此易出现监控盲区,降低了安全性[3]。而基于Internet的远程监控机器人系统,其具备了一定移动能力,可实现无死角的全覆盖监控,提高了安全防护等级。
1 移动机器人系统设计
1.1 系统架构设计
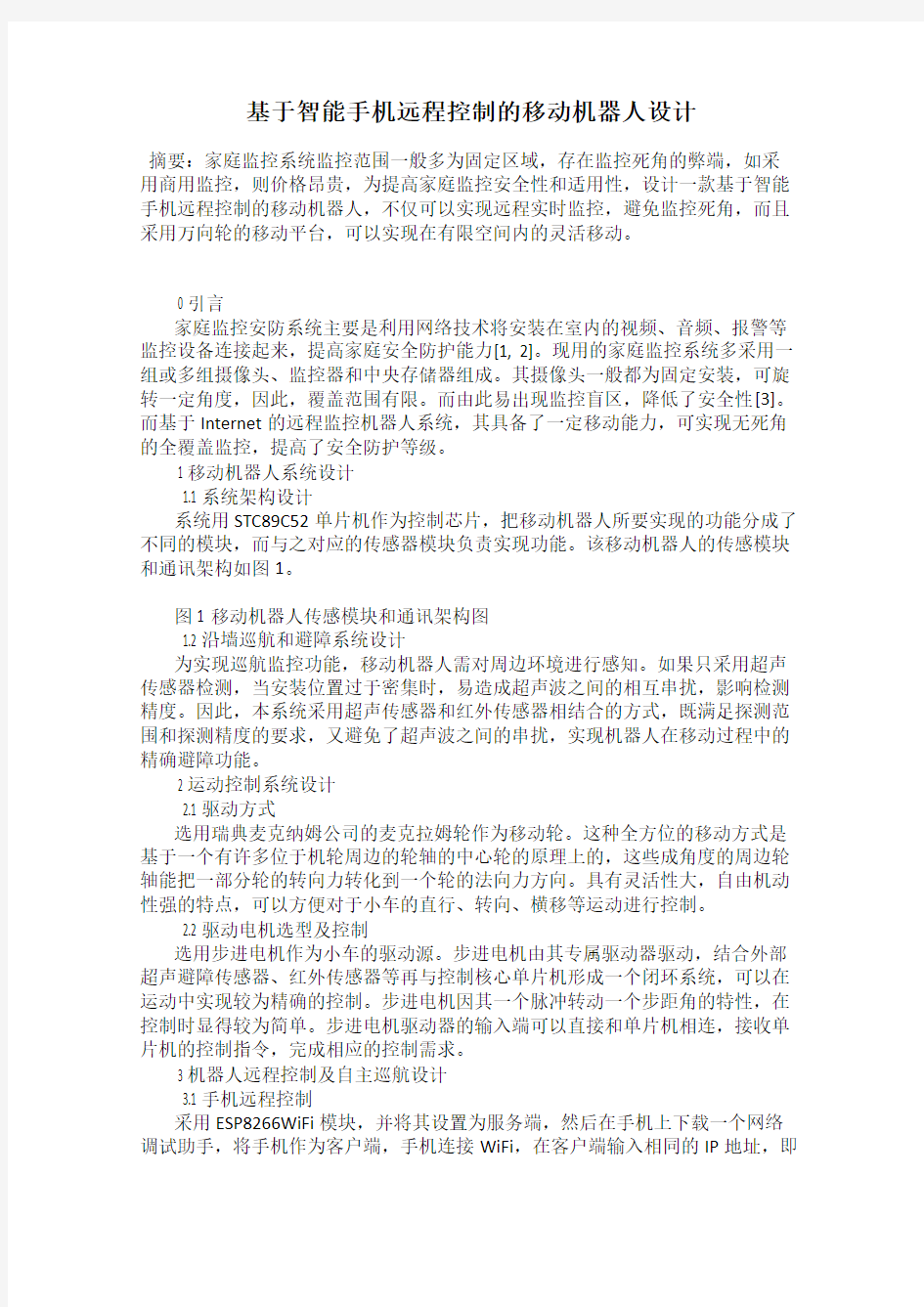
系统用STC89C52单片机作为控制芯片,把移动机器人所要实现的功能分成了不同的模块,而与之对应的传感器模块负责实现功能。该移动机器人的传感模块和通讯架构如图1。
图1 移动机器人传感模块和通讯架构图
1.2 沿墙巡航和避障系统设计
为实现巡航监控功能,移动机器人需对周边环境进行感知。如果只采用超声传感器检测,当安装位置过于密集时,易造成超声波之间的相互串扰,影响检测精度。因此,本系统采用超声传感器和红外传感器相结合的方式,既满足探测范围和探测精度的要求,又避免了超声波之间的串扰,实现机器人在移动过程中的精确避障功能。
2 运动控制系统设计
2.1 驱动方式
选用瑞典麦克纳姆公司的麦克拉姆轮作为移动轮。这种全方位的移动方式是基于一个有许多位于机轮周边的轮轴的中心轮的原理上的,这些成角度的周边轮轴能把一部分轮的转向力转化到一个轮的法向力方向。具有灵活性大,自由机动性强的特点,可以方便对于小车的直行、转向、横移等运动进行控制。
2.2 驱动电机选型及控制
选用步进电机作为小车的驱动源。步进电机由其专属驱动器驱动,结合外部超声避障传感器、红外传感器等再与控制核心单片机形成一个闭环系统,可以在运动中实现较为精确的控制。步进电机因其一个脉冲转动一个步距角的特性,在控制时显得较为简单。步进电机驱动器的输入端可以直接和单片机相连,接收单片机的控制指令,完成相应的控制需求。
3 机器人远程控制及自主巡航设计
3.1 手机远程控制
采用ESP8266WiFi模块,并将其设置为服务端,然后在手机上下载一个网络调试助手,将手机作为客户端,手机连接WiFi,在客户端输入相同的IP地址,即
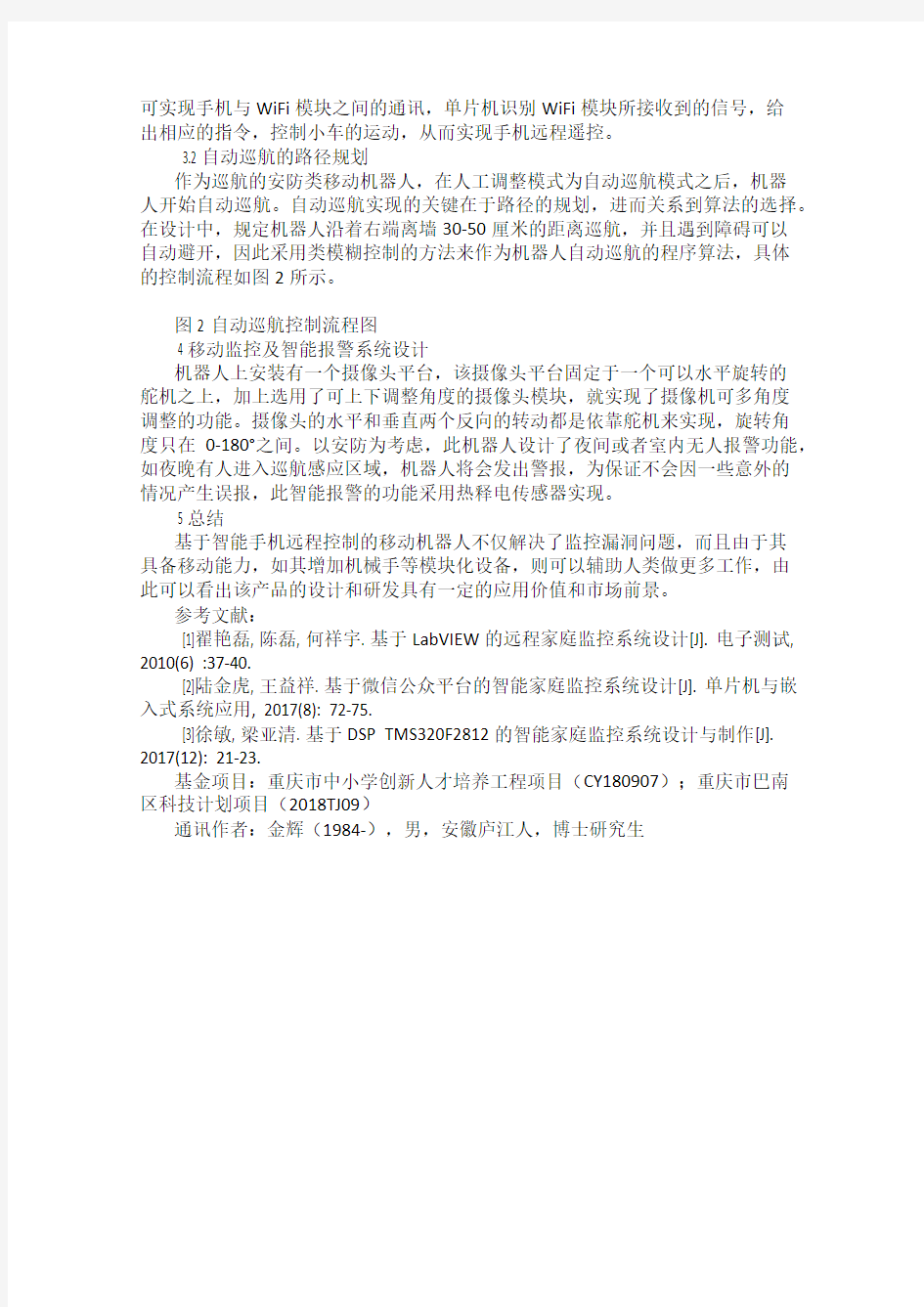
移动机器人定位--传感器和技术 摘要 确切的了解车辆的位置是移动机器人应用的一个基本问题。在寻找解决方案时,研究人员和工程师们已经开发出不同的移动机器人定位系统、传感器以及技术。本文综述了移动机器人定位相关技术,总结了七种定位系统:1.里程法;2.惯性导航;3.磁罗盘;4.主动引导; 5.全球定位系统; 6.地标式导航和 7.模型匹配。讨论了各自的特点,并给出了现有技术的例子。 移动机器人导航技术正在蓬勃发展,正在开发更多的系统和概念。因为这个原因,本文给出的各种例子只代表各自的种类,不表示作者的倾向。在文献上可以发现许多巧妙的方法,只是限于篇幅,本文不能引用。 1。介绍 摘要概述了该技术在传感器、系统、方法和技术的目标,就是在一个移动机器人的工作环境中被找到。在测量文献中讨论这个问题,很明显,不同方法的基准比较是困难的,因为缺乏公认的测试标准和规的比较。使用的研究平台大不相同,用于不同的方法的关键假设也大不相同。再进一步,困难源自事实上不同的系统是处在其发展的不同阶段。例如,一个系统已经可以商业化;而另一个系统,也许有更好的性能,却只能实验室条件下作有限的测试。正是由于这些原因,我们一般避免比较甚至判断不同系统或技术的表现。在这篇文章里,我们也不考虑自动引导车(AGV)。AGV使用磁带、地下的引导线、或地面上的彩色条纹在作引导。这些小车不能自由设计路径,不能改变自己的道路,那样它们无法响应外部传感器输入(如避障)。然而,感兴趣的读者可能会在[Everett, 1995]找到AGV引导技术调查。 也许最重要的移动机器人定位文献的阅读结果,正是到目前为止,并没有真正完美的解决问题的方案。许多局部的解决办法大致分为两组:绝对的和相对的位置测量。因为缺乏一种完善的方法,开发移动机器人通常结合两种方法,从每个小组选一个方法。这些方法可以进一步分为以下七类: I:相对位置的测量(也称为Dead-reckoning) 1。里程法 2。惯性导航 II:绝对位置测量(基于参考的系统) 3。磁罗盘 4。主动发射引导 5。全球定位系统 6。地标式导航 7。模型匹配
浅谈智能手机对个人电脑的远程控制 许杰 (黔南民族师范学院物理与电子科学系,贵州都匀558000) 摘要:通过在塞班操作系统手机上运行TSMobiles 软件,基于Windows远程桌面(RDP)协议,实现了对个人电脑的远程连接,使手机用户可以随时随地掌握个人电脑的情况,并能通过手机发出相应指令对个人电脑进行操作。 关键词:智能手机; TSMobiles; 个人电脑; 远程控制 1 引言 近年来随着通信技术的不段发展和人们消费水平的不断提高,智能手机的普及越来越大众化。对智能手机的应用功能要求也越来越来高。另一方面现代生活节奏也使更多白领要求通讯工具有更多的实用功能。因此,用手机对个人电脑的远程控制符合大众的需求。 本文介绍了利用手机运行TSMobiles软件利用通信网络与个人电脑连接,实现远程控制。利用手机移动性强、通信网络覆盖面广的优点实现了随时随地对个人电脑实施控制,从而实现大众无时无刻对办公、生活、娱乐等方面的需求。 2 对系统的介绍和要求 TSMobiles是一个运行在手机上的JAVA软件,它基于Windows 远程桌面(RDP)协议,让你可以通过手机远程访问运行Windows操作系统的电脑桌面或Windows Server系
统的终端服务,效果等同于电脑上面的远程桌面链接(MSTSC命令)。 主要功能:兼容WinXP/7/Vista/NT/2000/2003/2008等Windows系列操作系统;可以保存要连接的远程主机列表,并可以对列表进行加密管理,以杜绝未经许可的访问;手机键盘可以当电脑键盘直接输入文本到远程的应用程序中;支持全屏或放大/缩小两种屏幕显示模式;支持Windows系统的热键,比如:WIN+R、F4; 2.1 对手机系统和网络的要求:支持的设备:JAVA (J2ME) MIDP 2.0;内存要求:不少于2M的空闲内存;屏幕大小:至少130*170,65536色;网络要求:GPRS、EDGE、3G或者WIFI无线局域网络;手机端要求连接PC需要:利用GPRS,但必需是cmnet接入方式;wlan 直接访问被控电脑。 2.2 个人电脑,需满足以下条件:开放远程桌面功能(我的电脑,右健,属性--远程---勾选上:允许用户远程连接此计算机,同时设置好PC防火墙,开放3389端口);具备与手机直接连接IP,如,公网IP,或者通过WLAN连接的内网IP (此地址,是手机访问的依据)。 3 安装运行 3.1 下载安装(塞班操作系统的手机需对软件进行签名。) 3.2 运行安装后的软件:
基于深度视觉的室内移动机器人即时定位与建图研究 在无法获取GPS信号的室内场合,如何有效地解决移动机器人的室内定位与导航问题,已经成为机器人技术研究领域的难点与热点,而即时定位与地图构建(SLAM)方法为此提供了一个较为合适的解决方法。近些年,由于以Kinect为代表的深度相机具有同时获取场景的彩色信息与深度信息的特点,基于深度相机的视觉SLAM方法逐渐成为视觉SLAM研究的一个重要方向。 本文主要针对基于深度相机的室内移动机器人SLAM技术展开研究,先是利用TUM数据集完成视觉SLAM算法的测试,再在移动机器人平台上进行算法实验,结果能够较好地建立出室内环境的地图模型。本文的主要研究内容共分为以下几个部分:首先,对本课题研究中使用的深度相机的模型展开介绍,包括其中涉及的坐标系与坐标变换,以及深度相机的标定方法。 接着,分析机器人的视觉SLAM过程中涉及的相关系统变量,并对其运动方程和观测方程作出描述。同时,结合图模型,以位姿图的形式,表示移动机器人的即时定位与地图构建过程,为后续研究打下基础。 其次,详细研究基于深度相机的视觉SLAM算法的各个模块。考虑整体SLAM 算法的实时性能,在视觉SLAM的前端,采用计算速度极快的ORB特征,并利用汉明距离进行匹配,同时引入误匹配优化机制,提高特征匹配的准确率。 在估计相机运动时,利用深度相机的深度信息,使用3D-2D的方法估计两帧图像之间相机的运动。在后端处理部分,介绍回环检测方法,利用视觉词袋算法对机器人运动过程中的位姿进行回环,约束其位姿的估计误差。 然后,介绍基于位姿图的非线性优化方法,并利用g2o库求解相机运动轨迹,同时根据深度相机的数据,构建点云地图,展开算法的评价。再次,针对点云地图
APP综合监控系统解决设计方案 机房远程APP综合监控系统主要是对机房设备(如供配电系统、UPS电源、防雷器、空调、消防系统、保安门禁系统等)的运行状态、温湿度、烟雾、振动、红外、水浸、供电的电压、电流、频率、配电系统的开关状态、测漏系统、环境状态等进行实时监控并记录历史数据机房监控(机房动环系统)APP软件是怎样的,机房监控,机房动环系统 一、系统概述 机房远程APP综合监控系统主要是对机房设备(如供配电系统、UPS电源、防雷器、空调、消防系统、保安门禁系统等)的运行状态、温湿度、烟雾、振动、红外、水浸、供电的电压、电流、频率、配电系统的开关状态、测漏系统、环境状态等进行实时监控并记录历史数据,同时将机房设备的工作状态的进行实时的视频监控,实现对机房远程监控与管理功能,通过手机APP可对上述全部监控对象进行可靠、准确的监控与控制。使机房无线远程监控达到无人或少人值守,为机房高效的管理和安全运营提供有力的保证。 机房远程APP综合监控系统支持市面全系列安卓手机,手机终端可以通过4G/3G/GPRS/WIFI远程进行监控与控制,是目前无人值守管理人员最不可以缺少的系统组成部分之一,从而有效提高工作效率,保证机房系统运作的安全性与稳定性。 二、系统设计原则 系统设计坚持“技术先进、使用方便、经济合理、超前考虑”的原则,系统具有先进性、实用性、规范性、可靠性、开放性,同时为了保证整个系统稳定可靠,具备良好的整体升级、扩展能力和方便维护,符合机房间远程APP综合管理控制的需要,系统设备选型在符合系统功能要求的前提下,综合的考虑了性能指标、规格统一性及性能价格比。 可靠性 保证系统的高可靠性。即不会出现因为某一个设备发生故障而造成整个监控系统无法使用的现象。 系统的接入不会影响现有通信设备和网络的正常工作。
智能移动机器人 近年来,随着机器人研究的不断发展,机器人技术开始源源不断地向人类活动的各个领域渗透,结合这些领域的应用特点,各种各样的具有不同功能的机器人被研制出来,并且在不同的应用领域都得到了广泛的应用。 本文主要设计一个配置机械手的智能移动机器人,可以调速、转弯、抓取物体。涉及到双目摄像头定位、激光测距、电机控制、压力传感器等技术。 一、系统总体结构图 机器人系统主要由机械系统、驱动控制系统、视觉系统、传感器系统、上位机系统、电源系统以及人机交互系统等组成。 系统总体结构图如下: 智能机器人平台采用了主从结构的分布式处理方式,由上位机系统来协调控制各个子模块系统。各个子系统都有自己的数据处理机制,数据处理都在本模块的DSP处理器中完成。上位机只是负责数据融合、任务分解、策略选择制定、协调控制各子模块等工作。当上位机需要某个模块的数据时,子模块向上位机提供该模块经过处理以后的数据。由于大量的数据处理都在各个子模块中完成,上位机得到的都是经过处理后的小量数据,大大减少了上位机的负担。采用这种方式既提高了上位机的效率,又增加了系统的稳定性,方便系统的维护。 二、机械手
该机械手的设计仿照人类手臂的构造,总共有五个自由度,包括抬手臂转动关节,肩转动关节,肘转动关节,腕转动关节,手爪旋转关节与手爪开闭关节。这种多自由度的设计使得机械手具有较大的灵活度,以适应抓取不同目标物体的要求。 三、控制系统 1、感知系统 感知系统也就是传感器系统,本智能机器人系统的传感器系统可以只包含两个传感器,一个是测障、测距用激光传感器,一个是抓物时压力感测的压力传感器。 红外测距传感器(简称PSD:Poison Sensitive Detector): 通常采用光学三角测量方法来确定机器人同物体之间的距离:传感器的红外发光管发出红外光,当红外光没有碰到障碍的时候,红外光保持前行;当红外光碰到障碍的时候,红外光反射回来,并进入探测器。这样,在反射点,发射器,探测器之间形成一个三角形,探测器通过镜面反射,将红外光射入一个线性CCD中,由CCD测量反射光的角度,并由角度的大小来计算障碍物的距离。本机器人系统配置4路PSD传感器,分别以接近于90度的角度间距安装于机器人的前、后、左、右四个方向上和机械臂抓手的手掌内。 图2 PSD传感器位置示意图 压力传感器: 测得与物体接触的压力值返回给DSP分析处理:是否继续抓紧动作。装在机械臂抓手的每个手指上。 传感器系统结构图
基于视觉导航的轮式移动机器人设计方案第一章移动机器人 §1.1移动机器人的研究历史 机器人是一种自动化的机器,所不同的是这种机器具备一些与人或生物相似的智能,如感知能力、规划能力、动作能力和协同能力,是一种具有高度灵活性的自动化机器)。1962年,美国Unimation公司的第一台机器人Unimate。在美国通用汽车公司(GM)投入使用,标志着第一代机器人的诞生。 智能移动机器人更加强调了机器人具有的移动能力,从而面临比固定式机器人更为复杂的不确定性环境,也增加了智能系统的设计复杂度。1968年到1972年间,美国斯坦福国际研究所(Stanford Research Institute, SRI)研制了移动式机器人Shaky,这是首台采用了人工智能学的移动机器人。Shaky具备一定人工智能,能够自主进行感知、环境建模、行为规划并执行任务(如寻找木箱并将其推到指定目的位置)。它装备了电视摄像机、三角法测距仪、碰撞传感器、驱动电机以及编码器,并通过无线通讯系统由二台计算机控制。当时计算机的体积庞大,但运算速度缓慢,导致Shaky往往需要数小时的时间来分析环境并规划行动路径。 1970年前联月球17号探测器把世界第一个无人驾驶的月球车送七月球,月球车行驶0.5公里,考察了8万平方米的月面。后来的月球车行驶37公里,向地球发回88幅月面全景图。在同一时代,美国喷气推进实验室也研制了月球车(Lunar rover),应用于行星探测的研究。采用了摄像机,激光测距仪以及触觉传感器。机器人能够把环境区分为可通行、不可通行以及未知等类型区域。 1973年到1979年,斯坦福大学人工智能实验室研制了CART移动机器人,CART可以自主地在办公室环境运行。CART每移动1米,就停下来通过摄像机的图片对环境进行分析,规划下一步的运行路径。由于当时计算机性能的限制,CART每一次规划都需要耗时约15分钟。CMU Rover由卡耐基梅隆大学机
基于Android手机的智能家居远程控制系统 罗云1,胡伊菁2,刘松林 3 (武汉纺织大学电子与电气学院) 摘要:针对家里的安全和防盗问题、同时也为了满足人们日益智能化的生活需求,提出了一种基于Android 智能手机编写的Java应用程序作为远程控制系统,Cortex-M3作为中央控制器,利用物联网技术的智能家居系统。该系统不仅能适用于普通的住宅家庭用户,也可用于酒店等地方。经验证,智能家居系统成本低、可靠性高、设备简单、实用性强。 关键词:Android;Java;Cortex-M3;智能家居 0 引言 版随着生产力的不断发展,人们的物质生活水平不断提高,传统的家居系统成本高,安全性差已经无法满足人们的需求了,于是要求借助物联网技术和移动终端实现“安全的、方便的、实时的”智能家居控制系统 [1]。设计的这款基于Android手机的智能家居远程控制系统的创新点在于(1)利用智能手机进行远程控制,达到实时性的要求(2)有全面的安全预警系统(3)通过手机远程监控室内情况,防止盗窃。随着Android平台的扩张,“智能家居”系统也会被投入应用。 1 系统设计方案 智能家居系统主要是利用基于Android系统下编写Java应用程序智能手机作为远程控制终端,用户操作手机终端,通过GPRS网、WiFi网发送控制命令,将数据传到家中的网络设备,实现实时与家中的中央处理器(CORTEX-M3)通信,将命令传送到不同的MCU(STC89C52RC)单元,然后中央控制器进行数据处理的操作,再经网络将有效数据返回给用户,以实现对家里各用电器的操作与监控,当家发生异常情况,如:天然气泄漏、入室盗窃等,可通过安全预处理系统及时处理,并在第一时间将信息告知用户以便及时处理,将损失尽最大可能减小为零[2]。系统的设计框图如图1所示:
一种基于SMS的智能家居远程监控系统(1) 关键字:SMS智能家居远程监控系统 1 引言 随着生活节奏的加快,生活水平的提高,人们对现代家居的安全性、智能性、舒适性和便捷 性提出了更高的要求。智能家居控制系统就是适应这种需求而出现的新事物,正朝着智能化、远程化、小型化、低成本等方向发展。如今手机已经十分普及,如何让普通百姓只需要 增加少量投入便可以通过手机远程遥控自己家中的电器设备,远程查看设备或安防系统状 况。同时,一旦家中发生煤气泄露、火灾、被盗等安全事故时能够立即获知警报,及时处理。为此本文提出了一种基于SMS和Atmega128 的智能家居远程监控系统。 2 系统结构及工作原理 本文所设计的智能家居远程监控系统由CP U 模块、短信收发模块、电源模块、时钟模块、LCD 显示模块、键盘模块、驱动模块、无线收发模块、检测模块等模块组成,如图 1 所示。系统的工作原理如下:用户通过手机将控制或查询命令以短信的形式通过GSM 网发送到短信收发模块,CPU 再通过串口将短信读入内存,然后对命令分析处理后作出响应,控制相 应电器的开通或关断,实现了家电的远程控制。CPU 定时检测烟感传感器、CO 传感器、门禁系统的信号,一旦家中发生煤气泄露、火灾、被盗等险情时,系统立即切断电源、蜂鸣 器警报并向指定的手机发送报警短信,实现了家居的远程监视。为了达到更人性化的设计, 当用户在家时可通过手持无线遥控器控制各个家电的通断,通过自带的小键盘设定授权手机 号码、权限和设定系统的精确时间等参数。LCD 用来实时显示各电器状态和各个传感器的 状态。 图1 系统结构框图 3 硬件系统设计
第25卷第7期V ol.25No.7 控制与决策 Control and Decision 2010年7月 Jul.2010移动机器人路径规划技术综述 文章编号:1001-0920(2010)07-0961-07 朱大奇,颜明重 (上海海事大学水下机器人与智能系统实验室,上海201306) 摘要:智能移动机器人路径规划问题一直是机器人研究的核心内容之一.将移动机器人路径规划方法概括为:基于模版匹配路径规划技术、基于人工势场路径规划技术、基于地图构建路径规划技术和基于人工智能的路径规划技术.分别对这几种方法进行总结与评价,最后展望了移动机器人路径规划的未来研究方向. 关键词:移动机器人;路径规划;人工势场;模板匹配;地图构建;神经网络;智能计算 中图分类号:TP18;TP273文献标识码:A Survey on technology of mobile robot path planning ZHU Da-qi,YAN Ming-zhong (Laboratory of Underwater Vehicles and Intelligent Systems,Shanghai Maritime University,Shanghai201306, China.Correspondent:ZHU Da-qi,E-mail:zdq367@https://www.doczj.com/doc/a114620058.html,) Abstract:The technology of intelligent mobile robot path planning is one of the most important robot research areas.In this paper the methods of path planning are classi?ed into four classes:Template based,arti?cial potential?eld based,map building based and arti?cial intelligent based approaches.First,the basic theories of the path planning methods are introduced brie?y.Then,the advantages and limitations of the methods are pointed out.Finally,the technology development trends of intelligent mobile robot path planning are given. Key words:Mobile robot;Path planning;Arti?cial potential?eld;Template approach;Map building;Neural network; Intelligent computation 1引言 所谓移动机器人路径规划技术,就是机器人根据自身传感器对环境的感知,自行规划出一条安全的运行路线,同时高效完成作业任务.移动机器人路径规划主要解决3个问题:1)使机器人能从初始点运动到目标点;2)用一定的算法使机器人能绕开障碍物,并且经过某些必须经过的点完成相应的作业任务;3)在完成以上任务的前提下,尽量优化机器人运行轨迹.机器人路径规划技术是智能移动机器人研究的核心内容之一,它起始于20世纪70年代,迄今为止,己有大量的研究成果报道.部分学者从机器人对环境感知的角度,将移动机器人路径规划方法分为3种类型[1]:基于环境模型的规划方法、基于事例学习的规划方法和基于行为的路径规划方法;从机器人路径规划的目标范围看,又可分为全局路径规划和局部路径规划;从规划环境是否随时间变化方面看,还可分为静态路径规划和动态路径规划. 本文从移动机器人路径规划的具体算法与策略上,将移动机器人路径规划技术概括为以下4类:模版匹配路径规划技术、人工势场路径规划技术、地图构建路径规划技术和人工智能路径规划技术.分别对这几种方法进行总结与评价,展望了移动机器人路径规划的未来发展方向. 2模版匹配路径规划技术 模版匹配方法是将机器人当前状态与过去经历相比较,找到最接近的状态,修改这一状态下的路径,便可得到一条新的路径[2,3].即首先利用路径规划所用到的或已产生的信息建立一个模版库,库中的任一模版包含每一次规划的环境信息和路径信息,这些模版可通过特定的索引取得;随后将当前规划任务和环境信息与模版库中的模版进行匹配,以寻找出一 收稿日期:2009-08-30;修回日期:2009-11-18. 基金项目:国家自然科学基金项目(50775136);高校博士点基金项目(20093121110001);上海市教委科研创新项目(10ZZ97). 作者简介:朱大奇(1964?),男,安徽安庆人,教授,博士生导师,从事水下机器人可靠性与路径规划等研究;颜明重(1977?),男,福建泉州人,博士生,从事水下机器人路径规划的研究.
移动机器人项目 可行性方案 规划设计/投资分析/产业运营
移动机器人项目可行性方案 汽车工业、3C电子、烟草行业、物流行业是移动机器人应用最为广泛 的几个行业,市场前景广阔。截止至2017年,我国移动机器人产量为 12090台,占工业机器人比重9.2%。而国产移动机器人需求量快速增长,2017年我国移动机器人销量达到了12900台,同比增加87.2%。这进一步 刺激了移动机器人的进口和海外需求。 该移动机器人项目计划总投资7471.02万元,其中:固定资产投资5708.49万元,占项目总投资的76.41%;流动资金1762.53万元,占项目 总投资的23.59%。 达产年营业收入11855.00万元,总成本费用9318.71万元,税金及附 加125.33万元,利润总额2536.29万元,利税总额3011.45万元,税后净 利润1902.22万元,达产年纳税总额1109.23万元;达产年投资利润率 33.95%,投资利税率40.31%,投资回报率25.46%,全部投资回收期5.43年,提供就业职位243个。 坚持节能降耗的原则。努力做到合理利用能源和节约能源,根据项目 建设地的地理位置、地形、地势、气象、交通运输等条件及“保护生态环境、节约土地资源”的原则进行布置,做到工艺流程顺畅、物料管线短捷、
公用工程设施集中布置,节约资源提高资源利用率,做好节能减排;从而实现节省项目投资和降低经营能耗之目的。 ......
移动机器人项目可行性方案目录 第一章申报单位及项目概况 一、项目申报单位概况 二、项目概况 第二章发展规划、产业政策和行业准入分析 一、发展规划分析 二、产业政策分析 三、行业准入分析 第三章资源开发及综合利用分析 一、资源开发方案。 二、资源利用方案 三、资源节约措施 第四章节能方案分析 一、用能标准和节能规范。 二、能耗状况和能耗指标分析 三、节能措施和节能效果分析 第五章建设用地、征地拆迁及移民安置分析 一、项目选址及用地方案
智能家居实现手机远程控制 时间:2012-06-28 来源:未知作者:admin 点击: 285 次评论:0人 物联传感通过zigbee无线技术将家居设备与互联网进行联系起来,从而实现了我们无论何时何地,随心所欲 的自由操控家庭里的设备,了解家庭设备的状况,并在家居设备有异常情况时及时通知到用户。 有的朋友问我为什么要装智能家居呢,用手按开关习惯了,改成触屏的面板反倒觉得麻烦。试想是躺在床上动动手就能拉上窗帘、关灯、检查门锁麻烦,还是下床在屋里转一圈挨个排查麻烦呢?理论上当然是用智能家居的终端来控制房屋更加便捷、简单。作为一个初识智能家居 的人,客观的来说首次与智能家居的接触更多的是体验新奇。房屋的智能化、美观是一方面,更重要的让居住的人心里踏实。对智能家居的新奇劲过后,智能家居在实用上,我们能给它打几分? 早上离开家门的时候,只要拿起手机轻轻一按“离家”,家庭的家居设备将逐渐关闭,安防设备开启布防,电动窗户也将合上,无线云智能锁自行上锁,以确保家中安全。 下班路上,拿起手机轻轻一按,热水器已经提前启动,为您舒舒服服的冲个热水澡做好准备;空调已按您的指令自动打开,一进家门就是一个清凉的世界,舒适宜人;一身清爽之后,拿 起自己的手机,随心操控各类设备,畅快的享受数码高清大片带来的震撼;躺在软软的床上, 遥控灯光让环境变得温柔,远离一天的嘈杂,享受此时属于自己的静谧;入睡之前,窗帘在手 机的指令下徐徐拉上,带着刚才满眼的星光和您一同入梦…… 这一切的智能化运作将我们引入一个新的行业,就是物联网。物联传感通过zigbee无线技术将家居设备与互联网进行联系起来,从而实现了我们无论何时何地,随心所欲的自由操控家庭里的设备,了解家庭设备的状况,并在家居设备有异常情况时及时通知到用户。 物联网智能家居系统是智能家居控制技术和物联网技术完美结合的产物。zigbee无线智能 家居系统以无线的方式,通过手机,把智能开关、智能插座、无线红外转发器、窗帘控制器、无线红外入侵探测器、门磁、烟雾报警器、视频监控等智能家居系统所包含的设备连接成一个完全双向的网络,我们也可以称之为家庭物联网。这个网络由于完全符合Zigbee协议标准, 所以也继承了Zigbee网络可靠性高、安全性强、响应快速、组网自动化、自动诊断和恢复系 统故障等先天性的优势。居家生活智能化,对物联网zigbee无线技术来说,简直是小菜一碟。随着物联网技术的发展,它将影响包括我们衣、食、住、行在内的生活的方方面面。 一部手机,集大成控制家庭的所有设备,物联传感智能家居的研发团队为您呈现了完美的无线智能家居系统。 当你刚离开家上班,忽然想起家里的窗户和电器没关,这时候,不要慌,打开手机操作界面,就全部搞定;下班时,再用手机按几个下,让电饭锅启动烧饭,热水器开始烧水,空调慢 慢调节到人体适宜的温度。当你到家时,就可以先洗个澡,吃上热腾腾的饭菜,还感受到屋内宜人的温度…… 手机将成智能家居终端控制主流,为什么我们不通过智能家居系统来控制家庭里的照明和用电器呢?智能家居手机终端几个例子:
智能移动式送料机器人机械系统设计 摘要:智能移动式送料机器人以电动机作为驱动系统,运用单片机传感器等技术达到其智能移动的目的,实现行走、刹车、伸缩、回转等多种动作的操作。因此它具有机械化、程序化、可控化、适应性、灵活性强的特点。 前言:工业机器人是一种典型的机电一体化产品在现代生产中应用日益广泛,作用越来越重要,机器人技术是综合了计算机、控制、机构学、传感技术等多学科而形成的高新技术是当代研究十分活跃,应用日益广泛的领域。
现在,国际上对机器人的概念已经逐渐趋近一致。一般说来,人们都可以接受这种说法,即机器人是靠自身动力和控制能力来实现各种功能的一种机器。联合国标准化组织采纳了美国机器人协会给机器人下的定义:“一种可编程和多功能的,用来搬运材料、零件、工具的操作机;或是为了执行不同的任务而具有可改变和可编程动作的专门系统。”我国研制的排爆机器人不仅可以排除炸弹,利用它的侦察传感器还可监视犯罪分子的活动。监视人员可以在远处对犯罪分子昼夜进行观察,监听他们的谈话,不必暴露自己就可对情况了如指掌。 智能小车,又称轮式机器人,可以在人类无法
适应的恶劣和危险环境中代替人工作。它是一个集环境感知,规划决策,自动驾驶等功能于一体的智能系统。现如今已在诸多领域有广泛的应用。对于快要毕业的大学生来说也是一个实时、富有意义和挑战的设计课题。 正文: 设计方案: 一课题名称:智能移动式送料机器人设计 二机器人工作过程及设计要求 自主设计智能移动小车,设计一个取料 手爪装配到小车上,完成取料机器人的机械系统设计,并进行机器人运动规划和取料虚拟仿真,使机
器人完成如下动作:沿规定路径行驶——工件夹取——车体旋转——手爪张开,将工件从储存处送到运料车上。 三机器人设计的内容 一机械手的设计:
机器人设计开题报告 【篇一:搬运机器人毕业设计开题报告】 广东技术师范学院 毕业设计(论文)开题报告 题目4-dof搬运机器人的结构设计 专业名称飞行器动力工程 班级学号 学生姓名 指导教师 填表日期2013 年 10月 28 日 一、选题的依据及意义: 传统的工业机器人常用于搬运、喷漆、焊接和装配工作。工业现场 的很多重体力劳动必将由机器代替,这一方面可以减轻工人的劳动强度,另一方面可以大大提高劳动生产率。搬运机器人是可以进行自动 化搬运作业的工业机器人。最早的搬运机器人出现在1960年的美国,versatran和unimate两种机器人首次用于搬运作业。搬运作业是 指用一种设备握持工件,是指从一个加工位置移到另一个加工位置。搬运机器人可安装不同的末端执行器以完成各种不同形状和状态的 工件搬运工作,大大减轻了人类繁重的体力劳动。目前世界上使用 的搬运机器人逾10万台,被广泛应用于机床上下料、冲压机自动化 生产线、自动装配流水线、码垛搬运、集装箱等的自动搬运。部分 发达国家已制定出人工搬运的最大限度,超过限度的必须由搬运机 器人来完成。搬运机器人是近代自动控制领域出现的一项高新技术,涉及到了力学,机械学,电器液压气压技术,自动控制技术,传感 器技术,单片机技术和计算机技术等学科领域,已成为现代机械制 造生产体系中的一项重要组成部分。它的优点是可以通过编程完成 各种预期的任务,在自身结构和性能上有了人和机器的各自优势, 尤其体现出了人工智能和适应性。 应用搬运机器人进行工作,这是直接减少人力的一个侧面,同时由 于应用搬运机械人可以连续的工作,这是减少人力的另一个侧面。 因此,在自动化机床的综合加工自动线上,目前几乎都有搬运机械手,以减少人力和更准确的控制生产的节拍,便于有节奏的进行工 作生产。
扫地机器人(自动打扫机)的设计方案 1.绪论 随着现代社会生活节奏的加快,人们或忙于工作,或享受生活,时间越来越宝贵,所以不会把它浪费在整理家务和打扫卫生方面。收入水平的不断提高使得人们对生活质量的要求越来越高,高品质的生活首先要保证居住环境的干净卫生,因此大家渴望找到一种机器人,能够智能的打扫房间卫生。 机器人作为人类20世纪最伟大的发明之一,在短短的几十年发生了日新月异的变化。近几年机器人已成为高技术领域具有代表性的战略目标。机器人技术的出现和发展,不但使传统的工业生产面貌发生根本性变化,而且将对人类社会产生深远的影响。随着社会生产技术的飞速发展,机器人的应用领域不断扩展。从自动化生产线到海洋资源的探索,乃至太空作业等领域,机器人可谓无所不在。目前机器人已经走进人们的生活与工作,机器人已经在很多的领域代替着人类的劳动,发挥着越来越重要的作用,人们已经离不开机器人的帮助。机器人工程是一门复杂的学科,它集工程力学、机械制造、电子技术、技术科学、自动控制等为一体。目前对机器人的研究已经呈现出专业化和系统化,一些信息学、电子学方面的先进技术正越来越多地应用于机器人领域。 目前机器人行业的发展与30年前的电脑行业极为相似。今天在汽车装配线上忙碌的一线机器人,正是当年大型计算机的翻版。而机器人行业的利基产品也同样种类繁多,比如协助医生进行外科手术的机械臂、在伊拉克和阿富汗战场上负责排除路边炸弹的侦查机器人、以及通过编译程序使其能做整套表演动作的舞蹈机器人,还有不少参考人、狗、恐龙等动物的模样制造机器人玩具。 扫地机器人,又称自动打扫机、智能吸尘、机器人吸尘器等,是智能家用电器的一种,能凭借一定的人工智能,自动在房间完成地板清理工作。一般采用刷扫和真空方式,将地面杂物先吸纳进入自身的垃圾收纳盒,从而完成地面清理的功能。一般来说,将完成清扫、吸尘、擦地工作的机器人,也统一归为扫地机器人。扫地机器人也是当下比较流行的一种机器人,随着不断的研究发展智能化大幅度提高,能够自我定位、感应障碍物、规划路径以及自动充电。 2.扫地机器人的技术指标 综合考虑经济型和先进性的原则,参考淘宝网在售产品,我选择了一款扫地机器人以作对比,实物如图2.1所示。该产品采用革命性清扫系统,真空龙卷大吸力(普通机器人的5倍),无毛刷设计,首创滚筒吸取器,将适配器与座充合二为一(简约、美观而且不占空间),零部件高度模块化,可自由拆卸更换,垃圾盒、独立滤网仓方便抽取和清理。
(物联网)智能家居远程控制系统源程序
智能家居远程控制系统刘庆宇
;***************************************************** ;Filename:BSHB_1_0_2.ASM ;MCU:AT89S52OSC:6.0000MHz ;IC:MT8870ISD4002LM38674LS04ULN280324C02 ;Display:LED*4 ;Buildby:LiuQingYu ;Vision:V1.0.2 ;Date:2008-06-13 ;******************************************************** ;功能:利用电话线路,远程控制4组继电器的通断,控制电饭煲、电;暖风等家用电器。可以设定延时通断。恢复出厂设置时按住设 ;置按键按复位键即可恢复默认密码123456 ;默认开关状态为:关,延时为:无 ; ;如需改变等待振铃次数,请搜索“振铃检测程序”并进行修改。 ; ; ;寄存器组使用: ;00:主程序 ;01:显示子程序 ;****************************************** ;输入输出引脚定义 ;****************************************** ;MT8870:数据P0.0~P0.3 MT_INEQUP1 ;STD____INT0 ;ISD4002: ;ISDINT____INT1 MOSIBITP0.4 SSBITP0.5 SCLKBITP0.6 ;HD7279: DATBITP2.4 CSBITP3.5 CLKBITP3.6 ;24C02: SCLBITP1.6 SDABITP1.7 ;继电器(摘机电路): JDQKBITP1.4;低电平有效 ;继电器1(控制高压) JDQ0_DFBBITP0.0;电饭煲 JDQ1_DNFBITP0.1;电暖风 JDQ2_KTBITP0.2;空调
基于FPGA的六自由度智能移动机器人设 计 摘要:智能移动机器人是指无需人工干预,可以自主完成行驶任务的车辆。路径规划是移动机器人的一个重要组成部分,它的任务就是在具有障碍物的环境内,按照一定的评价标准,寻找一条从起始状态到达目标状态的无碰路径。遗传算法就是对自然界中生物的遗传特性进行模拟而得出的一种模拟进化算法,它是继模糊方法、神经网络、蚁群之后新加入路径规划研究领域的一种算法。提出了一种基于遗传算法解决移动机器人路径规划问题的方法。通过本文的研究及实验结果证明,将遗传算法应用于移动机器人的路径规划问题研究,能够探索与改进一种新的路径优化方法。 关键词:移动机器人;路径规划;遗传算法 Abstract:Intelligent mobile robot can complete the task independently without human intervention. Path planning is an important part of the mobile robot. Its task is to follow a certain evaluation criteria and find a route to goal state from the initial state without collision path in environments with obstacles. Genetic algorithm is a simulation of the genetic characteristics of the biological nature of the simulation and the results of evolutionary algorithms which is a path planning algorithm following the fuzzy methods, neural networks ant colony algorithm. This paper proposes a method to solve the problem of mobile robot path planning based on genetic algorithms. The research and experimental results show that the genetic algorithm can be applied to the mobile robot path planning, which improves a new path optimization methods. Key words: Mobile robot; Path planning; Genetic algorithm
第32卷第4期2006年7月 光学技术 OPTICAL TECHN IQU E Vol.32No.4 J uly 2006 文章编号:1002-1582(2006)04-0591-03 一种基于单目视觉的移动机器人室内导航方法Ξ 付梦印,谭国悦,王美玲 (北京理工大学信息科学技术学院自动控制系,北京 100081) 摘 要:针对室内导航的环境特点,提出了一种简单快速的、以踢脚线为参考目标的移动机器人室内导航方法。该方法从图像中提取踢脚线作为参考直线,通过两条直线在图像中的成像特征,提取角度和横向偏离距离作为移动机器人的状态控制输入,从而实现移动机器人的横向运动控制。该方法无需进行摄像机的外部参数标定,大大简化了计算过程,提高了视觉导航的实时性。 关键词:视觉导航;直线提取;Hough变换;移动机器人;踢脚线 中图分类号:TP242.6+2;TP391 文献标识码:A An indoor navigation algorithm for mobile robot based on monocular vision FU Meng-yin,T AN G uo-yue,WANG Mei-ling (Department of Automatic Control,School of Information and Science Technolo gy, Beijing Institute of Technology,Beijing 100081,China) Abstract:Considered the features of indoor environment,a sim ple fast indoor navigation algorithm for vision-guide mobile robot was presented,which used skirting lines as the reference objects to locate the mobile robot.This algorithm detected skirt2 ing lines using monocular images and analyzed the lines’parameters to provide angle and distance of the robot as in puts of robot control.Without calibrating camera parameters,this algorithm greatly reduces computation time and improves the real-time a2 bility of vision navigation. K ey w ords:vision navigation;line detection;Hough transform;mobile robot;skirt line 1 引 言 近年来,机器视觉因其含有丰富的环境信息而受到普遍的关注。随着视觉传感器价格的不断下降,视觉导航已成为导航领域研究的热点。在室外进行视觉导航时,采用视觉传感器可获取车道信息,通过摄像机的标定来实现坐标转换,通过确定车辆当前的状态来实现导航。绝大部分智能车辆都是应用视觉来完成车道检测的[1,2],例如意大利的AR2 GO[3]项目就是通过使用逆投射投影的方法[4]来确定车辆状态的,并获得了良好的实验效果。在室内进行视觉导航时,利用视觉提取室内环境特征,例如一些预先设置的引导标志就是通过图像处理进行识别并理解这些标志来完成导航任务的[5,6]。这些都需要在图像中进行大量的搜索运算来提取标志,并通过一系列的图像理解算法来理解标志的信息,因而计算量很大。当然也可以通过视觉计算室内环境,例如通过走廊中的角点特征来获取状态信息[7],以此减少图像搜索时的计算量。但这些角点信息易受移动机器人运动的影响,会模糊角点信息,为了提高计算精度需要通过光流法对背景信息进行运动补偿,计算复杂,实时性不理想。 当移动机器人在实验室走廊环境下进行导航控制时,需要视觉传感器为其提供偏航角和横向偏离距离这两个参数。通过对单目视觉图像进行处理来获取这两个参数,完成移动机器人的横向运动控制。 2 摄像机成像模型与视觉系统 2.1 摄像机成像模型 使用视觉传感器首先要考虑的是其成像模型,它是指三维空间中场景到图像平面的投影关系,不同的视觉传感器有不同的成像模型。本文采用高分辨率CCD摄像机作为视觉传感器,其成像模型为针孔模型,空间中任意一点P在图像上的成像位置可以用针孔模型近似表示。如图1所示,P点投影位置为p,它是光心O同P点的连线O P与图像平面的交点,这种关系叫投射投影。图中标出的坐标系定义如下[8]: (1)图像坐标系I(u,v)是以图像平面的左上角为坐标原点所定义的直角坐标系,以像素为单位表示图像中点的位置。 (2)像平面坐标(x,y)指的是CCD成像靶面 195 Ξ收稿日期:2005-07-12 E-m ail:guoyuetan@https://www.doczj.com/doc/a114620058.html, 基金项目:国家自然科学基金资助项目(60453001) 作者简介:付梦印(1964-),男,北京理工大学信息科学技术学院自动控制系教授,博士,主要从事导航制导、控制组合导航及智能导航技术的研究。