第34卷 第5期光 学 学 报
Vol.34,No.5
2014年5月
ACTA OPTICA SINICA
May
,2014自干涉合成孔径激光三维成像雷达原理
刘立人
(中国科学院上海光学精密机械研究所中国科学院空间激光信息传输与探测技术重点实验室,上海201800)摘要 在直视合成孔径激光成像雷达(SAL)的基础上,提出了一种自干涉的产生三维成像的原理方法。首先对于交轨向正扫描和反扫描的柱面镜进行位置偏置,造成交轨向成像频谱的平移并产生相对线性相延,然后逐一对一对交轨向正扫描和反扫描收集聚焦像进行相干叠加,并由此产生自干涉。自干涉产生的交轨向平展条纹对于目标面的倾斜投射即可产生包含目标高度信息的波痕干涉图,
最后通过解包裹算法产生表征目标表面轮廓的等位线图。本方法采用一发一收的雷达结构通过单航过干涉法实现三维成像,结构简单,原理有效,同时具有抗大气、运动平台等相位干扰能力。
关键词 成像系统;合成孔径激光成像雷达;直视合成孔径激光成像雷达;干涉合成孔径雷达;三维地形浮雕成像;扫描柱面镜位置偏置
中图分类号 TN958 文献标识码 A doi:10.3788/AOS201434.0528001
Principle of Self-Interferometric Synthetic Ap
erture Ladarfor 3DImaging
Liu
Liren(Key Laboratory of
Space Laser Communication and Detection Technique,Shanghai Institute of Optics andFine Mechanics,Chinese Academy of
Sciences,Shanghai 201800,China)Abstract On the basis of down-looking
synthetic aperture ladar(DL-SAL),a kind of self-interferometric SAL for3D topographic relief imaging is proposed in this paper.Firstly,the forward-scanning and backward-scanning cylinderlenses for imaging along the orthogonal direction of travel are biased in their positions,it thus introduces a shiftedspectrum image with a linear phase term.Then pair of a forward-scanning
resulted focused image and the nextbackward-scanning resulted image are coherently
added,therefore a self-interference between the two images occurs.The flat fringes from this self-interference can be obliquely projected to a target plane,so that a subtly rippledinterferogram containing the target height information can be observed.Finally,by using the unwrapping algorithm,acontour mapping representing the surface profile will be achieved.This SAL including a transmitter and a receiverrealites the 3D imaging by
a one-pass interferometry.The features are simple in construction and effective in principle.Moreover,the phase errors from the atmospheric turbulence can be automatically compensated.Key words imaging systems;synthetic aperture imaging ladar(SAL);down-looking
SAL;interferometric syntheticaperture radar;3D topography relief imaging;position biasing of scanning cylindrical lensOCIS codes 2
80.6730;280.3640;110.6880;110.2970;110.3175 收稿日期:2013-12-17;收到修改稿日期:2014-01-
15作者简介:刘立人(1942—),男,研究员,博士生导师,目前主要从事空间信息光学方面的研究。E-mail:lirenliu@m
ail.shcnc.ac.cn1 引 言
合成孔径激光成像雷达(SAL)
近些年来得到迅速发展[
1-7
],实现三维成像必然是一个进一步发展的方向。微波侧视合成孔径雷达(SAR)
采用干涉技术实现三维地形浮雕成像[
8]
,常用的方法有单航过干涉法和两航过干涉法两种,单航过采用一发两收结构的SAR,双航过采用一发一收的SAR。在侧视合成孔径激光成像雷达领域也已经在实验平台规模的实验上实现了具有三维地形浮雕成像的干涉合成
孔径激光成像雷达[9]
,基本方法属于双航过干涉法。
光 学 学 报
由于大气扰动,运载平台的干扰以及其他影响,侧视SAL采用一发二收单通过干涉法需要保持二个接收机之间的稳定光频相位关系,采用一发一收两通过干涉法要求两幅图像之间保持光频级相位的同步,因此真正应用是非常困难的。
本课题组提出了一种直视合成孔径激光成像雷
达[7,10]
,基本原理是:对目标投射二个同轴同心且偏
振正交的光束并且进行自差接收,其中两个偏振光束波前由交轨向柱面波前和顺轨向的柱面波前组成。在交轨方向上这二个光束的柱面波前的符号相同,
曲率半径相同,并作相互反向的平移,因此在快时间轴上产生目标交轨向与目标位置有关的空间线性相位项调制。在运载平台运动的顺轨方向上这二个光束的波前具有符号相反的曲率半径,因此在慢时间轴上产生目标顺轨向位置有关的空间二次项相位历程。最终通过傅里叶变换实现交轨向聚焦成像,
通过共轭相位二次项匹配滤波实现顺轨向聚焦成像。由于采用了同轴光束自差接收,大大降低了大气、运动平台、光雷达系统和散斑等相位变化和干
扰的影响,同时简化了系统结构,使得实际应用成为可能。
本文在上述直视SAL的基础上,提出了一种自干涉的产生三维地形浮雕成像的原理方法。首先是对于交轨向正扫描和反扫描的柱面镜进行位置偏置,然后逐一对一对交轨向正扫描和反扫描收集聚焦像进行相干叠加,由此产生交轨向自干涉。自干涉产生的平展条纹对于目标面的倾斜投射即可产生包含目标高度信息的波痕干涉图,最后通过传统的解包裹算法产生表征目标表面轮廓的等位线图。该方法采用一发一收的单航过干涉法三维成像,提供了一种实现SAL干涉接收实现3D成像的可能途径。
2 一种自干涉直视合成孔径激光三维
成像雷达的结构
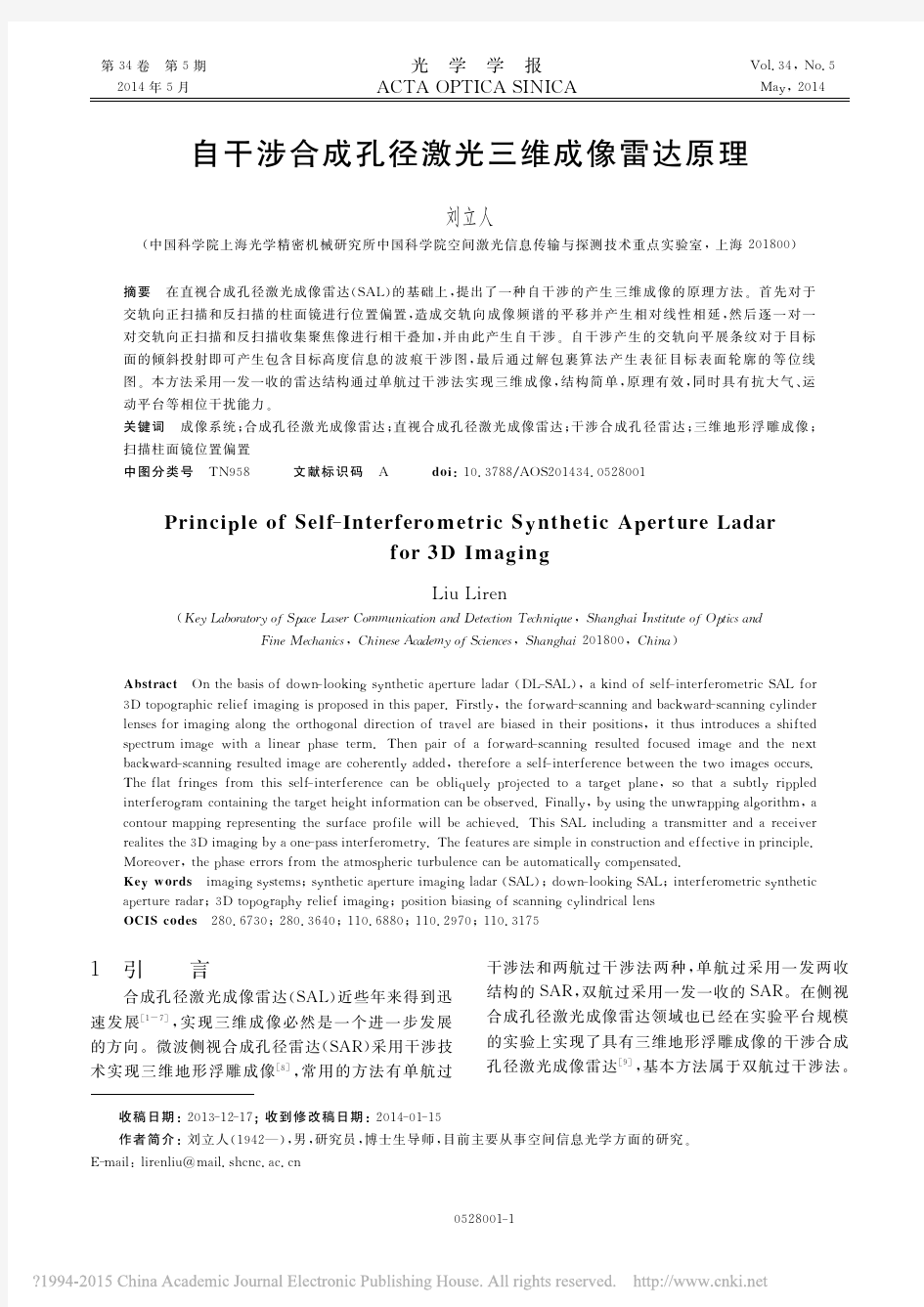
适合于基本原理的直视SAL可以有多种结构,图1给出一个具体结构来说明基本原理
。
图1自干涉合成孔径激光三维成像雷达的一种具体结构
Fig.1Aconfiguration of self-interferometric synthetic aperture 3Dimaging
ladar 激光光源输出平行偏振光束,
该光束经过发射偏振分束器(PS)在空间上被偏振分解为两个等强度的偏振正交的光束,即形成一个水平偏振光束和一个垂直偏振光束。水平偏振光束先经过反射镜到距离项柱面镜,顺轨向柱面镜和光阑,再经过λ/2波片旋转偏振态90°后直接通过发射偏振合束器(PS2
)。垂直偏振光束先经过距离项柱面镜,顺轨向柱面镜和光阑,经过反射镜后通过λ/2波片旋转偏振态再通过发射偏振合束器偏转光束。因此发射
偏振合束器再组合了水平偏振光束和垂直偏振光束成为同轴同心且偏振正交的光束,然后由发射主镜成像投影在目标面上,两个光阑都处于发射主镜的焦面上,光阑上的内光场被放大成像于目标面上。因为矩形光斑能够产生均匀的照明条幅,而且具有更好的成像分辨率,
所以激光光源输出平行偏振光束和光阑窗口均采用矩形截面。
两交轨向柱面镜作相对运动,其正、反方向定义见图1所示。两顺轨向柱面镜静止不动。两交轨向
刘立人: 自干涉合成孔径激光三维成像雷达原理
柱面镜的相位二次项符号相同,其相对移动时能够产生交轨向的线性相位项调制。两顺轨向柱面镜的相位二次项符号相反,SAL相对于目标运动时能够产生顺轨向二次项相位历程。
目标回波被接收望远镜收集并且通过λ/2波片旋转偏振态45°,然后通过偏振分束镜分解为同向接收通道和反向接收通道,最后通过平衡光电探测器输出光电流信号。
交轨向自干涉的要点是必须对于交轨向正扫描和反扫描的柱面镜进行位置偏置,包括同向偏置其使得两柱面镜的中心重合位置偏离出光阑窗口,也包括逆向偏置。同向偏置造成交轨向成像频谱的单边带平移,逆向偏置对于正扫描和反扫描的成像频谱产生相对线性相延,
然后逐一对一对交轨向正扫描和反扫描收集聚焦像进行相干叠加。
在光电处理器中,光电流信号先通过傅里叶变换进行交轨向聚焦成像,
然后实现相邻距离像轨迹的自干涉相干叠加,最后采用相位二次项历程共轭
匹配滤波实现顺轨向聚焦成像。
3 信息获取过程分析
交轨向柱面镜L11和L21可以为正透镜或者负透镜,现采用负透镜,焦距为fx,因此相位分布为二次项exp
jπλfx
x()
2。顺轨向柱面镜L12和L22的负号相反。取L12的相位分布为exp
jπλfy
y()
2
,L22的相位分布为exp-jπλfy
y()
2,其中焦距为fy
。距离项柱面镜的扫描从静态固定位置开始,到
达终点后再开始返回固定点。因此前一段扫描称之为正向扫描,
后一段扫描称之为反向扫描。3.1 正向扫描二维数据收集
对于正向扫描(n为偶数),垂直偏振光束和水平偏振光束在各自光阑位置上的内光场可以分别表达为
ein,V(x,y;tf,
n,nis even)=E0recttf,
nT()f
rectxW()xrectyW()y×exp jπλfxx-vxtf,n-Sb-S()a[]2
exp
jπλfy
y()
2,ein,P(x,y;tf,
n,nis even)=E0recttf,
nT()f
rectxW()xrectyW()
y×exp
jπλfxx+vxtf,n-Sb+S()a[
]2
exp-jπλfy
y(
)
2,(1)光阑窗口宽度为Wx×Wy,扫描时间为系统快时间其变量记为tf,
n,柱面镜运动速度为vx,扫描时间宽度为Tf-
Tf2≤tf,
n≤Tf()
2
,
Sb为正反扫描中的相位二次项附加的相等的中心位移,2Sa为正反扫描中的相位二次项附加的中心相对偏离,因此tf,
n=0的两个交轨向柱面镜的中心位置分别位于S1=Sb+Sa,
S2=Sb-Sa.
(2) 由发射主镜产生的发射光场通过夫琅禾费衍射到达目标面,因此目标面上的光场事实上是内光场的尺度放大(-M倍)。M=Z/ft,其中Z是目标距离,ft是发射主镜焦距。
忽略水平偏振光束和垂直偏振光束的相同相位因子如夫琅禾费衍射相位二次项,因此正向扫描的垂直偏振光束和水平偏振光束在目标面上的外光场分别表达为
et,V(x,y:tf,
n,nis even)=Etrecttf,
nT()f
rectxMW()xrectyMW()y×exp jπM2λfxx+Mvxtf,n+MSb+MS()a[]2
exp
jπM2λfy
(y-nΔY)[]
2,et,P(x,y:tf,
n,nis even)=Etrecttf,
nT()f
rectxMW()xrectyMW()
y×exp
jπM2λfxx-Mvxtf,n+MSb-MS()b[]2
exp-jπM2λfy
(y-nΔY)[]
2,(3)式中ΔY为顺轨向采样距离间隔,Et=E0tat/M,tat为大气通过率。
可以看到光学足址(扫描条幅)的尺度为
光 学 学 报
MWx×MWy。
采用一个目标点来分析回波收集情况。目标回波由接收望远镜接收,从目标到光学望远镜接收天线的传播也用夫琅禾费衍射描述。假定目标点(xp,yp)的有限尺度为dx×dy,在光学接收天线平面上的正向扫描的垂直偏振和水平偏振的接收场强分别为
er,V(xp,yp:tf,n,nis even)=ρ(xp,yp)Errecttf,nT()frectxpMW()xrectyp-nΔYMW()y
×exp jπM2λfxxp+Mvxtf,n+MSb+MS()a[]2
exp
jπM2λfy
(yp-nΔY)[]
2,er,P(xp,yp:tf,n,nis even)=ρ(xp,yp)Errecttf,nT()frectxpMW()xrectyp-nΔYMW(
)
y
×exp
jπM2λfxxp-Mvxtf+MSb-MS()a[]2
exp-jπM2λfy
(yp-nΔY)[]
2, (4)式中Er=
dx
dyλ
ZEttat,ρ(xp,yp)为目标点的光场反射率。正向扫描时的一路探测接收产生同相电流为
iip(xp,yp,tf,n,nis even)=ηSd2槡22er,1(xp,yp:tf,n,n)+槡22
er,2(xp,yp:tf,n,n[
]
)×槡22er,1
(xp
,yp
:tf,
n,n)+槡22
er,2
(xp
,yp
:tf,
n,n[])*
=η2ρ2
(xp,yp
)E2
r
recttf,nT()f
rectxpMW()xrectyp
-nΔYMW()y
×1+cos2πM2
λfx2(xp+MSb)Mvxtf
+Sa
v()[
]{}x
exp jπM2
λfy
/2(yp
-nΔY)[]2
,(5)式中η为光电探测率,Sd为接收望远镜主镜接收面积。另外一路探测接收产生π相移电流为
iop(xp,yp:tf,n,nis even)=ηSd2槡22er,V(xp,yp:tf,n,n)-槡22
er,P(xp,yp:tf,
n,n[
]
)×槡22er,V
(xp
,yp
:tf,
n,n)-槡22
er,P
(xp,yp
:tf,
n,n[])*
=η2ρ2
(xp,yp
)E2
r
recttf,nT()f
rectxpMW()xrectyp
-nΔYMW()y
×1-cos2πM2
λfx2(xp+MSb)Mvxtf
+Sa
v()[
]{}x
exp jπM2
λfy
/2(yp
-nΔY)[]2
.(6) 因此,
正向扫描平衡接收的输出电流可表示为ib(xp,yp,tf,n,nis even)=iin(xp,yp:tf,n,nis even)-iop(xp,yp:tf,
n,nis even)=ηρ2(xp,yp)E2
rrecttf,nT()frectxpMW()xrectyp-nΔYMW(
)ycos2πM2λfx
2(xp+MSb)Mvxtf+Sav()[
]{
}
x×
exp
jπM2λfy/2
(yp-nΔY)[
]
2
.(7
)3.2 反向扫描二维数据收集
反向扫描取vx=-vx,
垂直偏振光束和水平垂直偏振光束在各自光阑位置上的内光场可以分别表达为ein,V(x,y:tf,
n,nis odd)=E0recttf,
nT()f
rectxW()xrectyW()y×exp jπλfxx+vxtf,n-Sb-S()a[]2
exp
jπλfy
y()
2,ein,P(x,y:tf,
n,nis odd)=E0recttf,
nT()f
rectxW()xrectyW()
y×exp
jπλfxx-vxtf,n-Sb+S()a[
]2
exp-jπλfy
y(
)
2.(8
) 反向扫描的垂直偏振光束和水平偏振光束目标面上的外光场可以分别表达为
刘立人: 自干涉合成孔径激光三维成像雷达原理
et,V(x,y:tf,
n,nis odd)=Etrecttf,
nT()f
rectxMW()xrectyMW()y×exp jπM2λfxx-Mvxtf,n+MSb+MS()a[]2
exp
jπM2λfy
(y-nΔY)[]
2,et,P(x,y:tf,
n,nis odd)=Etrecttf,
nT()f
rectxMW()xrectyMW()
y×exp
jπM2λfxx+Mvxtf,n+MSb-MS()a[
]2
exp-jπM2λfy
(y-nΔY)[
]
2.(9) 反向扫描的垂直偏振和水平偏振的接收场强分别为
er,V(xp,yp:tf,n,nis odd)=ρ(xp,yp)Errecttf,nT()frectxpMW()x
rectyp-nΔYMW()y×exp jπM2λfxxp-Mvxtf,n+MSb+MS()a[]2
exp
jπM2λfy
(yp-nΔY)[]
2,er,P(xp,yp:tf,n,nis odd)=ρ(xp,yp)Errecttf,nT()frectxpMW()xrectyp-nΔYMW(
)
y
×exp
jπM2λfxxp+Mvxtf,n+MSb-MS()a[
]2
exp-jπM2λfy
(yp-nΔY)[
]
2. (10) 同样,
反向扫描平衡接收的输出电流为ib(xp,yp:tf,n,nis odd)=iin(xp,yp:tf,n:nis odd)-iop(xp,yp:tf,
n,nis odd)=ηρ2(xp,yp)E2
rrecttf,nT()frectxpMW()xrectyp-nΔYMW(
)ycos2πM2λfx
2(xp+MSb)Mvxtf,n-Sav()[
]{
}x×
exp
jπM2λfy/2
(yp-nΔY)[
]
2
.(11
)(7)式和(11)式表达了目标点(xp,yp)产生的数据收集方程。可见同向位移Sb产生了交轨向线性相移动的位置平移,而异向位移Sa产生了交轨向线性相移动的时间延时。
4 信息处理过程分析
信息处理可以采用传统的交轨向傅里叶变换聚焦和顺轨向共轭相位二次项匹配滤波聚焦成像算法,也
可以采用二维傅里叶变换算法1
1
。本文采用前一种算法。首先对目标回波进行交轨向聚焦成像,采用傅里叶变换实现。因此,正向扫描的交轨聚焦像为Iorg(ξ,y:xp,yp:,nis even)=Ftf→
ξib(xp,yp:tf,n,nis even{})=ηρ2(x,y)E2
rTfrectxpMW()x
sinc(Tfξ)×δξ-2(xp+MSb)vxMλf()x+δξ+2(xp+MSb)vxMλf(
)[]{
}x
×
rectyp
-nΔYMW()y
exp jπM2
λfy
/
2(yp
-nΔY)[]2
exp j2πξSa
v()x
.(12
) 同样,
反向扫描的距离聚焦像为Iorg(ξ,y:xp,yp,nis odd)=Ftf→
ξib(xp,yp:tf,n,nis odd{})=ηρ2
(x,y)E2
rTfrectxpMW()x
sinc(Tfξ)×δξ-2(xp+MSb)vxMλf()x+δξ+2(xp+MSb)vxMλf(
)[]{
}x
×
rectyp
-nΔYMW()y
exp jπM2
λfy
/
2(yp
-nΔY)[]2
exp-j2πξSa
v()x
,(13
)公式中的δξ-2(xp+MSb)vxMλf()x+δξ+
2(xp+MSb)vxMλf()
x
项表明交轨向的成像占据了正负两个边带,而同向位移Sb表明最终可以平移成像点的位置。
为了消除孪生重叠,采用成像频率域单边滤波,令成像面即条幅宽度为Xp-Xp/2≤xp≤Xp/()2,设计MSb>Xp/2可以实现ξ>0的正频率域单边滤波成像。而设计MSb<-Xp/2可以实现ξ<0的负频率域单边滤波成像。本文分析中均采用正频率域单边滤波成像。
光 学 学 报
正频率域单边滤波成像条件下,正反向扫描的距离聚焦像分别为
Iorg(ξ,y:xp,yp,nis even)=ηρ2(x,y)E2
rTfrectxpMW()x
sinc(Tfξ)×δξ-2(xp+MSb)vxMλf[]{
}x
×rectyp
-nΔYMW()y
exp jπM2
λfy/
2(yp
-nΔY)[]{}2
exp j2πξSa
v()x
,(14)Iorg
(ξ,y:xp,yp
,nis odd)=ηρ2
(x,y)E2
r
Tf
rectxpMW()
x
sinc(Tf
ξ)×δξ-2(xp+MSb)vx
Mλf[]{}x
×rectyp
-nΔYMW()y
exp jπM2
λfy/
2(yp
-nΔY)[]{}2 exp-j2πξSa
v()x
.(15) 可见异向位移最终在交轨成像方向上产生相对线性相位移。
取相邻两个交轨聚焦项,n(偶数)和(n+1)(奇数)相干叠加组合成为一个交轨项输出,新序号为k=-!,…,-1,
0,1,…,!,即有n=2k;n+1=2k+1。所以组合交轨聚焦项为Iorg(ξ,y:xp,yp:tf,n,k)=Iorg(ξ,y:xp,yp,nis even)+Iorg(ξ,
y:xp,yp,n+1is odd)=2ηρ2(xp,yp)E2
rTfrectxpMW()x
sinc(Tfξ)×δξ-2(xp+MSb)vxMλf[]{
}
x
×rectyp
-kΔYMW()y
exp jπM2
λfy
2(yp
-kΔY)[]{}2
cos 2πξSav()x
,(16
) 可见在交轨成像方向上产生干涉调制cos 2πξSav()
x
,
这是本文的关键点。下一步实现顺轨向匹配滤波聚焦成像。顺轨向采用二次项相位历程的共轭匹配滤波聚焦成像,滤波函
数为相位历程二次项的共轭函数
exp-jπM2λfy/2
(
kΔY)[]
2
,(17
)在连续函数逼近下,可以取得解析表达。有二次项匹配滤波方程
rect
yp-yMW(
)yexp
jπM2λfy/2
(yp-y)[]{}
2×exp-jπM2λfy/2
y()
2
=
MWyexp-jπM2λfy/2(yp-y)[
]2
sinc MWyyM2λfy/()
2
×δ(y-yp)
,(18
)因此,最终的二维聚焦成像输出为
Iout(ξ,y:xp,yp)=4ηρ2(xp,yp)E2
rTfMWysinc(Tfξ)×δξ-2(xp+MSb)vxMλf[
]{
}
x
×sinc
TyyM2
λfy/(
)2×δ(y-yp{})cos 2πξSav()
x
.(19
) 从上述成像公式中显而易见:目标点(xp,yp)
的成像位置在
ξ=
2(xp+MSb)vxMλfx
,
y=yp.
(20
) 用点扩散函数表达成像分辨率函数为
p(ξ,y)=sinc(Tfξ)sinc MWyyλM2 fy
/()
2,(21
)相当于成像宽度为
δξ=2
Tf
,
δy=2
λM2
fy
/2MWy=λMfyWy
,(22)应当注意频率和交轨距离之间的关系x=Mλfx/
2vx
ξ。同时令扫描时间宽度为光阑宽度(Xp)扫描时间的K倍即Tf=K
Wxvx
,
则交轨向的距离单位的分辨率为
δ
x=λMfxWx1K
.(23
) 特别应当注意在交轨项上垂直干涉项c
os2πξSav(
)
x
,
其周期为
刘立人: 自干涉合成孔径激光三维成像雷达原理
Δξ=vx
Sa,
(24)这是用于等位线投影三维测量的核心基础。同时,
干涉条纹周期也可以采用距离单位表达:
Δ
X=λMfxXpWx
2Sa=δ
xWx2Sa
.(25
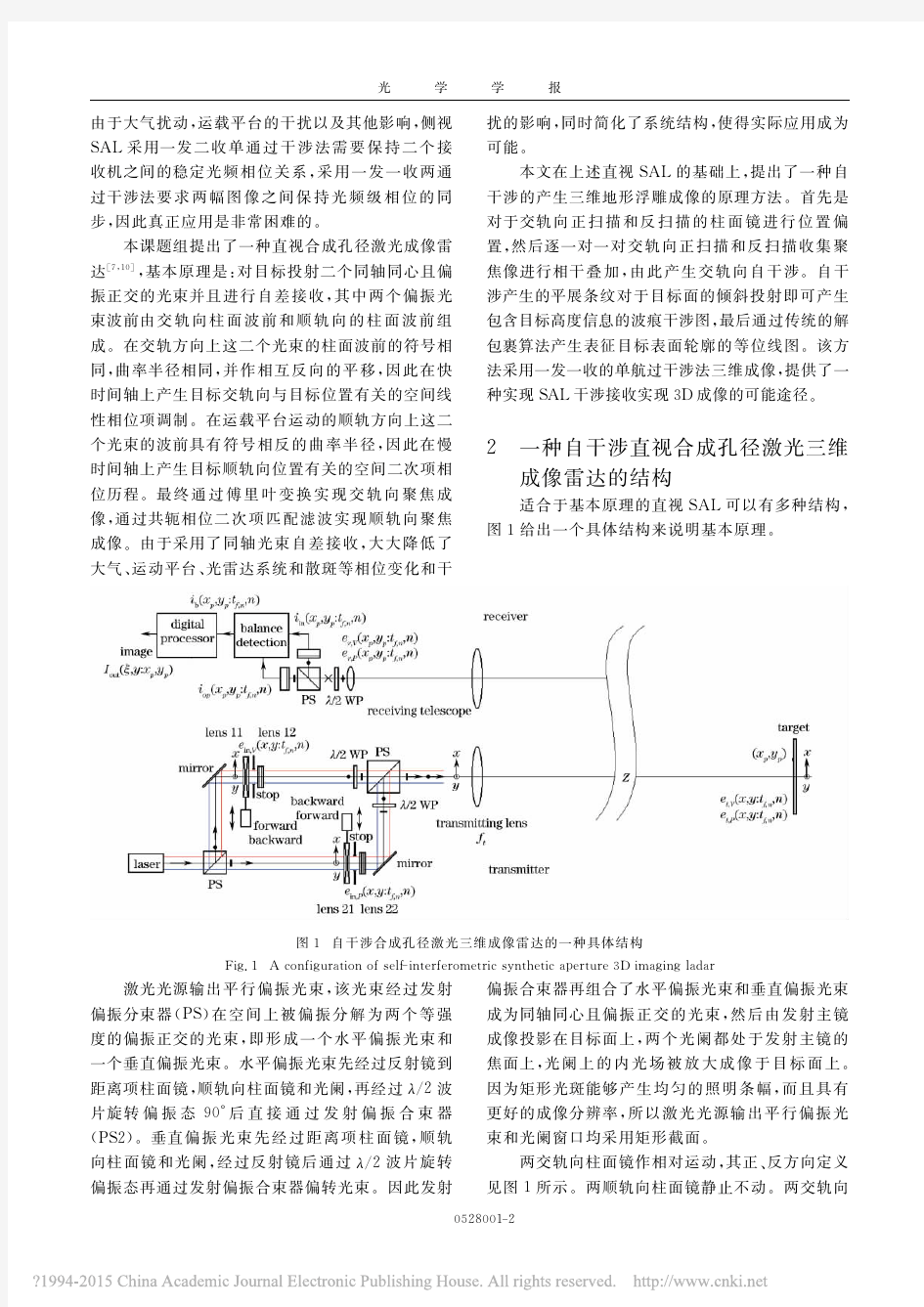
)5 讨 论
如图2所示,直视SAL的侧视观察可以实现3D地形浮雕成像。对于平面地形自干涉产生的平展条纹投影将在SAL像上沿交轨向产生平行条纹干涉图,因此对于3D地形将产生包含目标高度信息的局部变化的波痕干涉图,
最后可以采用传统的解包裹算法产生表征目标表面轮廓的等位线图。为了更好理解,以下给出一个具体的SAL的设计考虑。要求作用距离1.8km,照明光斑尺寸7.5m×7.5m,成像分辨率18mm。据此设计光阑窗口尺寸
5mm×5mm,交轨向和顺轨向柱面镜聚焦60mm,发射主镜焦距1.2m,主镜放大率M=1500。给定
Sb=2.5mm,Sa=0.5mm,因此干涉条纹周期为180mm
。
图2自干涉SAL的干涉条纹的侧视投影实现3D
地形浮雕成像
Fig.2 3Dtopographic relief imaging
from an obliqueprojection of flat interference fringes from a self- interferometric
SAL交轨向柱面镜lens11和lens21的tf,
n=0的相位二次项原始中心位置分别为S1=Sb+Sa和S2=
Sb-Sa。
以扫描-Wx2,W
x()
2
为标准,lens11的宽度为Wx2+Wx2+S1+Wx2,光学中心位于Wx+S1和Wx
2
之间。lens21的宽度为
Wx2+Wx
2
+S2+Wx2S2>Wx()
2,光学中心位于于Wx+S2和
Wx2
之间,或者宽度为Wx2+Wx2+Wx2+Wx2
S2≤
Wx()
2,光学中心位于Wx+S2和Wx-S2之间。
这些公式可用于计算交轨向柱面镜的尺寸。
图1给出的是一种原理性结构图,在具体实施上所有分系统均可以进一步简化,
例如发射的偏振分离组合和柱面镜扫描分系统的具体设计上具有多种结构的选择。
6 结 论
在直视SAL的基础上,本文提出了一种自干涉的产生三维地形浮雕成像的原理方法。要点是对于交轨向正扫描和反扫描的柱面镜进行位置偏置,包括同向偏置其使得柱面镜的中心重合位置偏离出光阑窗口,也包括逆向偏置。同向偏置造成交轨向成像频谱的单边带平移,逆向偏置对于正扫描和反扫描的成像频谱产生相对线性相延,
然后逐一对一对交轨向正扫描和反扫描收集聚焦像进行相干叠加,并由此产生自干涉。自干涉产生的平展条纹通过侧视方向对于目标面的投射即可产生包含目标高度信息的波痕干涉图,通过传统的解包裹算法产生表征目标表面轮廓的等位线图。
本方法采用一发一收的单航过干涉法三维成像,在直视SAL中作一些修改就可以实现3D成像,因此结构简单,原理有效。直视SAL本身具有抗大气、运动平台等相位干扰能力,因此这种附加的自干涉效应也不受大气、运动平台等相位干扰的影响。本建议提供了一种实现SAL干涉接收实现3D成像的可能途径。
在直视SAL的原始设计中[7,1
0]
,交轨向和顺轨向的内光场相位二次项波前是通过光学元件衍射产生的。本文设计交轨向和顺轨向的内光场相位二次项波前采用相位二次项柱面镜直接产生,交轨向扫描采用驱动器直接推动,因此波面及其扫描位置可以获得很高的精确度。交轨向的扫描时间的启点和扫描位置的启点对于所有扫描必须保持不变,一种简单的解决方法是在扫描机械上采用高精度位置传感器来触发扫描时间启点。下一步将在我们已经发展的直视SAL装置上开展实验验证工作。
光 学 学 报
参考文献
1MBashkansky,R L Lucke,E Funk,et al..Two-dimensionalsynthetic aperture imaging in the optical domain[J].Opt Lett,2002,27(22):1983-1985.
2SM Beck,J R Buck,W F Buell,et al..Synthetic-apertureimaging ladar:laboratory demonstration and signal processing[J].Appl Opt,2005,44(35):7621-7629.
3JRicklin,M Dierking,S Fuhrer,et al..Synthetic aperture ladarfor tactical imaging[C].DARPA Strategic Technology Office,2007.
4BKrause,J Buck,C Ryan,et al..Synthetic aperture ladar flightdemonstration[C].in CLEO:2011,OSA Technical Digest(Optical Society of America,2011),paper PDPB7.
5Zhou Yu,Xu Nan,Luan Zhu,et al..2Dimaging experiment of a2Dtarget in a laboratory-scale synthetic aperture imaging ladar[J].Acta Optica Sinica,2009,29(7):2030-2032.
周 煜,许 楠,栾 竹,等.尺度缩小合成孔径激光雷达的二维成像实验[J].光学学报,2009,29(7):2030-2032.
6Liu Liren,Zhou Yu,Zhi Yanan,et al..A large-aperturesynthetic aperture imaging ladar demonstrator and its verificationin laboratory space[J].Acta Optica Sinica,2011,31(9):
0900112.
刘立人,周 煜,职亚楠,等.大口径合成孔径激光成像雷达演示样机及其实验室验证[J].光学学报,2011,31(9):0900112.7Liu Liren.Coherent and incoherent synthetic aperture imagingladars and laboratory-space experimental demonstrations[Invited][J].Appl Opt,2013,52(4):579-599.
8CV Jakowatz,D E Wahl,P H Eichel,et al..Spotlight-ModeSynthetic Aperture Radar:A Signal Processing Approach[M].Springer US,1996.
9SCrouch,Z W Barber.Laboratory demonstrations ofinterferometric and spotlight synthetic aperture ladar techniques[J].Opt Express,2012,20(22):24237-24246.
10Liu Liren.Principle of down-looking synthetic aperture imagingladar[J].Acta Optica Sinica,2012,32(9):0920002.
刘立人.直视合成孔径激光成像雷达原理[J].光学学报,2012,32(9):0920002.
11Liu Liren.2DFourier-transform imaging algorithm for syntheticaperture imaging ladars[J].Acta Optica Sinica,2014,34(1):0128001.
刘立人.合成孔径激光成像雷达的二维傅里叶变换成像算法[J].光学学报,2014,34(1):0128001.
栏目编辑:殷建芳
合成孔径雷达概述 1合成孔径雷达简介 (2) 1.1 合成孔径雷达的概念 (2) 1.2 合成孔径雷达的分类 (3) 1.3 合成孔径雷达(SAR)的特点 (4) 2合成孔径雷达的发展历史 (5) 2.1 国外合成孔径雷达的发展历程及现状 (5) 2.1.1 合成孔径雷达发展历程表 (6) 2.1.2 世界各国的SAR系统 (9) 2.2 我国的发展概况 (11) 2.2.1 我国SAR研究历程表 (11) 2.2.2 国内各单位的研究现状 (12) 2.2.2.1 电子科技大学 (12) 2.2.2.2 中科院电子所 (12) 2.2.2.3 国防科技大学 (13) 2.2.2.4 西安电子科技大学 (13) 3 合成孔径雷达的应用 (13) 4 合成孔径雷达的发展趋势 (14) 4.1 多参数SAR系统 (15) 4.2 聚束SAR (15) 4.3极化干涉SAR(POLINSAR) (16) 4.4合成孔径激光雷达(Synthetic Aperture Ladar) (16) 4.5 小型化成为星载合成孔径雷达发展的主要趋势 (17) 4.6 性能技术指标不断提高 (17) 4.7 多功能、多模式是未来星载SAR的主要特征 (18) 4.8 雷达与可见光卫星的多星组网是主要的使用模式 (18) 4.9 分布SAR成为一种很有发展潜力的星载合成孔径雷达 (18) 4.10 星载合成孔径雷达的干扰与反干扰成为电子战的重要内容 (19) 4.11 军用和民用卫星的界线越来越不明显 (19) 5 与SAR相关技术的研究动态 (20) 5.1 国内外SAR图像相干斑抑制的研究现状 (20) 5.2 合成孔径雷达干扰技术的现状和发展 (20) 5.3 SAR图像目标检测与识别 (22) 5.4 恒虚警技术的研究现状与发展动向 (25) 5.5 SAR图像变化检测方法 (27) 5.6 干涉合成孔径雷达 (31) 5.7 机载合成孔径雷达技术发展动态 (33) 5.8 SAR图像地理编码技术的发展状况 (35) 5.9 星载SAR天线方向图在轨测试的发展状况 (37) 5.10 逆合成孔径雷达的发展动态 (38) 5.11 干涉合成孔径雷达的发展简史与应用 (38)
第四章 合成孔径雷达 合成孔径雷达(Synthetic Aperture Radar ,简称SAR )是成像雷达中应用最 多,也是本书讨论的重点。在前几章对雷达如何获取高的距离分辨率和横向分辨 的基础上,从本章开始用三章的篇幅对合成孔径雷达作较详细的讨论。 首先,结合工程实际介绍合成孔径雷达的原理。在前面的讨论中已经提到, 根据不同的要求,成像算法(特别是横向成像算法)有许多种,本章只介绍最简 单的距离-多普勒算法的原理,目的是由此联系到对合成孔径雷达系统的要求以 及工程实现方面的问题。 合成孔径雷达通常以场景作为观测对象,它与一般雷达有较大不同,我们将 在本章讨论合成孔径雷达有别于一般雷达的一些技术性能和参数。 4.1 条带式合成孔径雷达成像算法的基本原理 4.1所示,设X 轴为场景的中心 线,Q 为线上的某一点目标,载机以 高度H 平行于中心线飞行,离中心线 的最近距离B R 为 B R = (4.1) 当载机位于A 点时,它与Q 点的斜距 为 R = (4.2) 式中t X 为点目标Q 的横坐标。 当分析中心线上各个点目标的回波状况及成像算法时,可以在包括场景中心 线(即X 轴)和载机航线的平面里进行。至于场景里中心线外的情况将在后面 说明,这里暂不讨论。 一般合成孔径雷达发射线性调频(LFM )脉冲,由于载机运动使其到目标的 距离发生变化,任一点目标回波在慢时间域也近似为线性调频,而且包络时延也 几何示意图
随距离变化,即所谓距离徙动。合成孔径雷达成像算法的任务是从载机运动录取得到的快、慢时间域的回波数据,重建场景图像,它是二维匹配滤波问题。 严格考虑距离徙动的成像算法比较复杂,在实际应用中,一般均根据情况采用一些较简单的算法,这些将在第五章里系统介绍。在这里我们主要讨论分辨率较低,距离徙动影响可以忽略的最简单的情况,这时可采用简易的距离-多普勒基本算法。 所谓距离徙动的影响可以忽略不计是指雷达波束扫过某点目标的相干处理时间里,目标斜距变化引起的距离徙动值小于距离分辨单元长度的1/4~1/8,即场景中心线上所有点目标的回波(距离压缩后的)在慢时间域里均位于同一个距离单元。当然,因斜距改变引起的二次型相位变化还是需要考虑的,即系统的脉冲响应函数应考虑二次型相位。这种情况下的成像算法是比较简单的,可将回波信号先在快时间域作脉压匹配滤波,然后再对快时间域的每一个距离单元分别沿慢时间作方位压缩的匹配处理,于是得到场景的二维图像。在上面的图4.1中,我们提出只对中心线上的目标进行讨论,场景的二维图像当然包括场景里中心线以外的目标,这将在下一节里说明。 脉压匹配滤波可以在时域用回波数据与系统函数作卷积处理,也可以在频域作乘积处理,由于乘积的运算量小,同时时频域之间的傅里叶变换有FFT快速算法,频域计算用得更多。此外,由于场景有一定宽度,比发射脉冲宽度宽不少,而沿慢时间录取的数据长度一般也比波束扫过一个点目标的相干积累时间长得多,即时域信号长度比系统匹配函数长得多,这里应将信号分段处理后再加以拼接。 4.2合成孔径雷达回波的多普勒特性 信号有时域表示和频域表示,一般情况直接获取的是时域信号,通过傅里叶变换得到它的频谱。合成孔径雷达信号也是如此,快时间表示的发射信号是在时域生成,而慢时间回波则为载机运动过程中回波的变化序列。通过傅里叶变换,可以得到快时间频谱(距离谱)和慢时间频谱(多普勒谱或方位谱)。 合成孔径雷达信号有它的特殊性,它的回波为众多点目标回波的线性组合,而对一个点目标来说,其快、慢时间回波均为(或近似为)线性调频信号。对于
Real and Synthetic Aperture Radar
Real Aperture Radar (RAR) flight direction
azimuth Synthetic Aperture Radar (SAR) flight direction
azimuth
1
Spatial Resolution (1)
2
距离分辨率 与真实孔径雷达距离向分辨率相同。但由于真实孔径 机载雷达一般用短脉冲来实现距离向分辨率,而合成孔 径雷达通常用带宽(脉冲频率的变化范围)为B的线性调 频脉冲来实现作用距离向的良好分辨率。
δr =
1 c cτ = 2 2B
Spatial Resolution (2)
For Real Aperture Radar (Side-looking Radar)
razimuth ?
λR
l cτ 2 sin θ
rground ? range =
For Synthetic Aperture Radar (SAR)
razimuth ?
l 2 c 2 B sin θ
rground ?range =
3
Rr =
τc
2 cos γ
=
ground Range resolution
pulse length × speed of light 2 cos ( depression angle )
Range Resolution (2)
4
激光雷达与激光成像雷达 一、激光雷达与激光成像雷达 一、激光雷达与激光成像雷达 人通过感觉器官感知,认识外部世界的一切。用耳朵听音乐、话音、机器的轰隆声、钟声、铃声等一切通过声音传递的信息;用手感觉温度、物体的硬软以及物质的存在;用眼睛观察外部世界的形状、颜色、运动状态、速度、位置、识别物体的种类等等。人的眼睛之所以可以看见外部世界,是因为太阳光谱中的可见光照射在物体上反射的结果。那么除了“可见光谱”之外还存在别的“不可见的光谱”吗?事实上,广义的光谱按频段的不同,有大家所熟悉的电磁波、远红外、近红外、可见光、紫外光谱,而可见光谱区中,红色的光波长最长,紫色的波长最短。而且人们已经发现不同的物质辐射不同的谱线,在特定的条件下还可以只辐射某一单一波长的谱线,当其人们发现不可见光谱区中的单一的光谱谱线具有可贵的特性的时候,就力图去产生、开发、利用这种单一光谱谱线,由此产生了激光及用于不同场合的激光系统。 视觉引发人们的形象思维,眼睛从外界事物所获取的信息量大,直接而快速,是其他感觉器官所不能代替的,这也就是古人所说的“眼见为实”的深切内涵。正是因为这个道理,人们不愿受限于“可见光”的可见,而想去探求自然光条件下所看不见的东西,如想在漆黑的夜晚,去观察外部世界,就开发出了“夜视仪”。被动“红外热成像仪”也不是依赖于可见光的反射特性去观察变幻莫测的外部世界的,而是依赖于物体本身的热辐射,无论白天或黑夜都可以用以观察人类世界的一切,而且已经是超视距的。目前最新的热成像仪,1ms内热敏成像。红外成像高速测温用来检测来复枪,其射出的弹头在弹道上飞行速度为840m/s,弹头距枪口0.914 4m处的热成像还能分辨出弹头上不同部位摩擦热的温差。 遥感仪则可以依据物体本身的辐射谱线,包括电磁波段与红外光区,远距离成像,把肉眼原本看不见的自然变化,转化为可见,以照片的形式或屏幕显示的图像,甚至动态图像的形式展现出来,这就是当今人们感兴趣的可视化技术。人们力图从各个领域做这方面的研究和开发应用。 通过眼睛人们能够确定方向——定位,作为控制手的动作的依据,当然这是受限于“视距”之内的,通过望远镜可以延伸视距;但是“定位”的精度达不到人们通用目的需要,所谓“差之毫厘,失之千里”。雷达满足了远距离定位和精度的要求,雷达源于英文Radio Detection And Ranging的缩写RADAR,于1935年问世。 当其“激光”这种波长处于红外光谱波段的“激光光源”被研究出来之后,人们自然想到利用微米波段(红外光谱波段)的光波作为信息的载体去探测、获取其他手段难于探测、观测到的目标的信息。激光雷达研制成功后,相继激光成像雷达应运而生。激光雷达的英文名字“LADAR”是Laser Detection And Ranging的缩写。激光雷达的研究是从目标探测和测距入手的,早期(1962~1976年)的研究系统被称为光雷达(Optical RADAR),并命名为LIDAR(Light Detection And Ranging)。可以说军事应用对测量系统精确度的要求日
合成孔径雷达成像自聚焦算法的比较 【摘要】本文简要地分析和比较两类合成孔径雷达自聚焦算法的特点,并通过多点目标自聚焦成像对其进行验证,表明结论可靠。 【关键词】自聚焦算法;多点目标;孔径雷达 0 引言 SAR自聚焦算法的任务是首先要对经过处理后的未补偿的SAR信号进行相位误差估计,然后消除其相位误差。SAR自聚焦算法就其本质而言是一个二维估计问题,在公式(2)中的相位误差既是空变的又是不可分离的乘性噪声的事实使问题变得极为棘手。影响成像的几何线性,分辨率、图像对比度和信噪比的主要因素取决于相位误差的性质和大小,基于处理孔径上相位误差形式,表1给出两大类相位误差及其每一类对SAR成像的一般影响。 表1 相位误差的分类 1 几种实用的自聚焦算法的比较 一般来说,自聚焦算法可以划分为两类:基于模式算法和非参数算法。基于模式的自聚焦算法估计相位误差的模式展开系数。低阶模自聚焦仅能估计二阶相位误差,而更复杂的方法还可以估计高阶多项式相位误差。子孔径相关法(MD)和多孔经相关法(MAM)是针对低频相位误差补偿提出的基模自聚焦算法的范例。基于模式算法虽然执行起来相对简单而且算法高效。不过只能相位误差被正确估计的情况下才能保证这样的优越性。 第二类自聚焦算法,即非参数自聚焦算法,典型的有相位梯度自聚焦算法,基于最小熵准则和最大对比度准则的自聚焦方法,这些方法都不需要相位误差的先验知识。特别地,相位梯度自聚焦算法几种改进的算法。其中特征向量法是在PGA框架下运用了极大似然算子取代了原始的相位差算子核,改进的相位梯度自聚焦算法的策略通过选择一组高质量的目标以提供非迭代的PGA解。另一种方法是运用加权最小二乘法以实现相位误差最小化的PGA。适用范围扩大,计算高效。 在一些SAR应用中,相位误差显著依赖位置,空变的自聚焦的常用的方法是将大场景分成更小的子图像,每个子图像的误差近似不变的,因此,传统的空间不变的自聚焦程序可以应用到每个子图像。当重新聚焦时,个别的子图像拼接或镶嵌在一起产生完整的场景图像聚焦图像。 2 性能评价标准 第一个测试是检查在方位域一维的点目标响应。聚焦质量质量指标包括3dB
合成孔径雷达概述 蔡 Beautyhappy521@https://www.doczj.com/doc/9818783256.html, 二OO八年三月二十三
1合成孔径雷达简介 (3) 1.1 合成孔径雷达的概念 (3) 1.2 合成孔径雷达的分类 (4) 1.3 合成孔径雷达(SAR)的特点 (5) 2合成孔径雷达的发展历史 (6) 2.1 国外合成孔径雷达的发展历程及现状 (6) 2.1.1 合成孔径雷达发展历程表 (7) 2.1.2 世界各国的SAR系统 (10) 2.2 我国的发展概况 (12) 2.2.1 我国SAR研究历程表 (12) 2.2.2 国内各单位的研究现状 (13) 2.2.2.1 电子科技大学 (13) 2.2.2.2 中科院电子所 (13) 2.2.2.3 国防科技大学 (14) 2.2.2.4 西安电子科技大学 (14) 3 合成孔径雷达的应用 (14) 4 合成孔径雷达的发展趋势 (15) 4.1 多参数SAR系统 (16) 4.2 聚束SAR (16) 4.3极化干涉SAR(POLINSAR) (17) 4.4合成孔径激光雷达(Synthetic Aperture Ladar) (17) 4.5 小型化成为星载合成孔径雷达发展的主要趋势 (18) 4.6 性能技术指标不断提高 (18) 4.7 多功能、多模式是未来星载SAR的主要特征 (19) 4.8 雷达与可见光卫星的多星组网是主要的使用模式 (19) 4.9 分布SAR成为一种很有发展潜力的星载合成孔径雷达 (19) 4.10 星载合成孔径雷达的干扰与反干扰成为电子战的重要内容 (20) 4.11 军用和民用卫星的界线越来越不明显 (20) 5 与SAR相关技术的研究动态 (21) 5.1 国内外SAR图像相干斑抑制的研究现状 (21) 5.2 合成孔径雷达干扰技术的现状和发展 (21) 5.3 SAR图像目标检测与识别 (23) 5.4 恒虚警技术的研究现状与发展动向 (26) 5.5 SAR图像变化检测方法 (28) 5.6 干涉合成孔径雷达 (32) 5.7 机载合成孔径雷达技术发展动态 (34) 5.8 SAR图像地理编码技术的发展状况 (36) 5.9 星载SAR天线方向图在轨测试的发展状况 (38) 5.10 逆合成孔径雷达的发展动态 (39) 5.11 干涉合成孔径雷达的发展简史与应用 (39)
激光主动成像制导雷达的研究方向 刘立宝1 蔡喜平2 乔立杰2 杨 洋2 (哈尔滨工业大学威海分校理学系1 威海 264209) (哈尔滨工业大学应用物理系2 哈尔滨 150001) 文摘:文中介绍了国外制导用激光成像雷达近年来的发展情况,总结提出了激光主动成像制导雷达的研究方向。CO2激光成像雷达系统效率高,大气传输性能好,信息处理技术成熟,易于实现高灵敏度外差探测和三维成像,曾经是主要的研究对象;固体激光雷达系统具有系统质量轻、价格低,探测器不需要制冷的独特优点正成为现在研究热点;二极管激光成像雷达体积小、造价低、寿命长、可靠性高、功耗低,可采用室温探测,有着很大的发展前途。 关键词: 激光雷达 成像 制导 R esearch of active im aging guiding lidar system Liu Libao1 Cai Xiping2 Qiao Lijie2 Yang Yang2 (Department of Science,Weihai Campus,Harbin Institute of Technology1, Weihai, China, 264209) (Department of Applied Physics,Harbin Institute of Technology2, Harbin, China, 150001) Abstract:In this paper,the latest development of imaging guiding lidar overseas is introduced, and the future of that is predicted.The CO2lidar system has the advantages of higher efficiency,bet2 ter transmission capability in air,more developed information processing technology,easy to actualize the coherent detection with high sensitivity,and3D imaging,so it has been the main object for study2 ing.For the special excellence of light weight,lower price,and detector without cooling,the solid imaging lidar system is now being a hot spot of research.With well outlook,the diode lidar system has got more characteristics than the systems before. K eyw ords: Lidar Imaging Guidance 1999206224收稿 1999212220修回作者简介:刘立宝 男 31岁 讲师 从事光学成像研究及教学工作。 第29卷第2期 红外与激光工程 2000年4月Vol.29No.2 Infrared and Laser Engineering A pr.2000
合成孔径雷达(SAR) 合成孔径雷达产生的过程 为了形成一幅真实的图像增加两个关键参数:分辨率、识别能力。 合成孔径打开了无限分辨能力的道路 相干成像特性:以幅度和相位的形式收集信号的能力 相干成像的特性可以用来进行孔径合成 民用卫星接收系统SEASA T、SIR-A、SIR-B 美国军用卫星(LACROSSE) 欧洲民用卫星(ERS系列) 合成孔径雷达(SAR)是利用雷达与目标的相对运动将较小的真实天线孔径用数据处理的方法合成一个较大孔径的等效天线孔径的雷达。 特点:全天候、全天时、远距离、和高分辨率成像并且可以在不同频段不同极化下得到目标的高分辨率图像 SAR高分辨率成像的距离高分辨率和方位高分辨率 距离分辨率取决于信号带宽 方位高分辨率取决于载机与固定目标相对运动时产生的具有线性调频性质的多普勒信号带宽 相干斑噪声 机载合成孔径雷达是合成孔径雷达的一种 极化:当一个平面将空间划分为各向同性和半无限的两个均匀介质,我们就可以定义一个电磁波的入射平面,用波矢量K来表征:该平面包含矢量K以及划分这两种介质的平面法线垂直极化(V):无线电波的振动方向是垂直方向与水平极化(H):无线电波的振动方向是水平方向 TE波:电场E与入射面垂直
TH波:电场E属于入射平面 合成孔径雷达的应用 军事上、地质和矿物资源勘探、地形测绘和制图学、海洋应用、水资源、农业和林业 合成孔径雷达在军事领域的应用:战略应用、战术应用、特种应用。 SAR系统的几个发展趋势:多波段、多极化、多视角、多模式、多平台、高分辨率成像、实时成像。 SAR图像相干斑抑制的研究现状 分类:成像时进行多视处理、成像后进行滤波 多视处理就是对同一目标生成多幅独立的像,然后进行平均。 这是最早提出的相干斑噪声去除的方法,这种技术以牺牲空间分辨率为代价来获取对斑点的抑制 成像后的滤波技术成为SAR图像相干噪声抑制技术发展的主流 均值滤波、中值滤波、维纳滤波用来滤去相干斑噪声,这种滤波方法能够在一定程度上减小相干斑噪声的方差 合成孔径雷达理论概述 合成孔径雷达是一种高分辨率成像雷达,高分辨率包含两个方面的含义:方位向的高分辨率和距离向高分辨率。它通过采用合成孔径原理提高雷达的方位分辨率,并依靠脉冲压缩技术提高距离分辨率 由于SAR雷达发射信号(距离向信号)和合成孔径信号(方位信号)均具有线性调频性质,SAR成像的实质就是通过匹配滤波器对距离向和方位向具有线性调频信号的信号进行二维脉冲压缩的过程,也就是依靠脉冲压缩技术提高距离分辨率,通过合成孔径原理提高雷达的方位分辨率的过程 SAR成像处理是先利用距离向匹配滤波器,进行距离脉压,实现距离向高分辨率后,再通过方位向德匹配滤波,最终得到原始目标的高分辨图像。
激光雷达在军事中的应用 摘要:本文简要介绍激光雷达的特点、激光雷达探测的基本物理原理及其在军事领域的应用现状.Laser rader’s character was briefly introduced in this essay.Besides,its elementary physical fundamental was also introduced as well al its use from military field. 关键词:激光雷达;探测;军事应用 1引言 激光雷达是现代激光技术与传统雷达技术相结合的产物,由发射机、天线、接收机、跟踪架及信息处理等部分组成。发射机是各种形式的激光器,如二氧化碳激光器、掺钕钇铝石榴石激光器半导体激光器及波长可调谐的固体激光器等;天线是光学望远镜;接收机采用各种形式的光电探测器,如光电倍增管、半导体光电二极管、雪崩光电二极管、红外和可见光多元探测器件等。激光雷达采用脉冲或连续波2种工作方式即为直接探测和外差探测。它像传统的微波雷达一样,由雷达向目标发射波束,然后接收目标反射回来的信号,并将其与发射信号对比,获得目标的距离、速度以及姿态等参数.但是它又不同于传统的微波雷达,它发射的不是微波束,而是激光束,使激光雷达具有不同于普通微波雷达的特点. 根据激光器的不同,激光雷达可工作在红外光谱、可见光谱和紫外光谱的波段上.相对于工作在米波至毫米波波段的微波雷达而言,激光雷达的工作波长短,是微波雷达的万分之一到千分之一,根据光学仪器的分辨率与波长成反比的原理,利用激光雷达可以获得极高的角分辨率和距离分辨率,通常角分辨率不低于0.1mrad ,距离分辨率可达0.1m , 利用多普勒效应可以获得10m / s 以内的速度分辨率.这些指标是一般微波雷达难以达到的,因此激光雷达可获得比微波雷达清晰得多的目标图像。 激光束的方向性好、能量集中,在20km 外,其光束也只有茶杯口大小,因而敌方难以截获,而且激光束的抗电磁干扰能力强,难以受到敌方有源干扰的影响. 由于各种地物回波影响,因而在低空存在微波雷达无法探测的盲区.而对于激光雷达,只有被激光照射的目标才能产生反射,不存在低空地物回波的影响,所以激光雷达的低空探测性能好.激光雷达体积小、重量轻,有的整套激光雷达系统的重量仅几十千克.例如为了适应海军陆战队的需要,美国桑迪亚国家实验室和伯恩斯公司都提出了手持激光雷达的设计方案.相对于重达数吨、乃至数十吨的微波雷达而言,激光雷达的机动性能显然要好得多. 任何事物都是一分为二的,激光雷达也有自身的缺陷.激光光束窄、方向性好,虽然表现出能量集中的优点,但不宜用作战场监视雷达搜索大空域.而且激光的传输受环境影响大,尤其是在雨、雪、雾的天气,激光在传输过程中的衰减更大.当然,激光在大气层外传输时不易衰减,有其得天独厚的优势.经过几十年的努力,科学家们趋利避害,已研制出多种类型的军用激光雷达.激光雷达在军事上可用于对各种飞行目标轨迹的测量。如对导弹对卫星的精密定轨等。激光雷达与红外、电视等光电设备相结合,组成地面、舰载和机载的火力控制系统对目标进行搜索、识别、跟踪和测量。由于激光雷达可以获取目标的三维图像及速度信息,有利于识别隐身目标。激光雷达可以对大气进行监测,遥测大气中的污染和毒剂,还可测量大气的温度、湿度、风速、能见度及云层高度。用激激光器作为辐射源的雷达。 2. 用干战场侦察的激光雷达 众所周知,普通的成像技术(如电视摄像、航空摄影及红外成像等)获得的场景图像都是反映被摄区域辐射强度几何分布的图像,而激光雷达可以通过采集方位角一俯冲角一距离一速度一强度等三维数据,再将这些数据以图像的形式显示出来,从而可产生极高分辨率的辐射强度几何图像、距离图像、速度图像等,因而它提供了普通成像技术所不能提供的信息. 例如美国桑迪亚国家实验库研制的一种激光雷达,激光器功率为120MW ,显示屏幕的像素为64
合成孔径雷达第一次作业 姓名:xxx 学号:xxx 一题目: 1.LFM信号分析:(1)仿真LFM信号;(2)观察不同TBP的LFM信号的频谱。(3)观察不同过采样率下的DFT结果,注意频谱混叠情况。 2.脉冲压缩仿真:针对“基带LFM信号”:(1)实现无误差的脉冲压缩;(2)通过频域补0实现时域十倍以上的过采样率,得到光滑的时域波形,通过观察给出指标(IRW,PSLR);(3)阅读资料,按照公式实现3阶(-20dB),6阶(-40 dB)泰勒加权,观察加窗效果,分析指标(IRW,PSLR),并对比MATLAB TAYLORWIN 函数的一致性;(4)在3阶泰勒加权下实现15.30.45.60.90.135度QPE下的脉冲压缩,显示输出波形,观察记录QPE的影响。 3.一维距离向仿真:(1)输入参数:目标参数:RCS=1,分别位于10km,11km,11km+3m,11km+50m处。LFM信号参数:中心频率1.0GHz,脉冲宽度30us,带宽30MHz。 (2)输出:设计采样波门,仿真回波,完成脉冲压缩,检测各峰值位置,判断每个目标是否得以分辨,分析各出现在相应位置及幅度的原因。 二题目分析与解答: 1.问题分析:由基础知识知,决定LFM信号的主要参数有中心频率fc(此处仿真取fc=0),带宽B,脉冲宽度Tp, 调频斜率K,其中K=B/Tp。对LFM信号进行傅里叶变换时,不同的时宽带宽积(TBP)会对频谱有不同的影响。 主要程序段(源程序见附件): %参数设置 Tp=5e-6; B=10e6; K=B/Tp;Fs=2*B; Ts=1/Fs; N=Tp/Ts; TBP=Tp*B %波形产生 t=linspace(-Tp/2,Tp/2,N); St=exp(j*pi*K*t.^2); Phase=pi*K*t.^2; Fre=2*pi*K*t; f=linspace(-Fs/2,Fs/2,N); figure(2) plot(f*1e-6,fftshift(abs(fft(St))),'k'); xlabel('Frequency/MHz'); ylabel('Magnitude'); title('Frequence Response'); legend('TBP=50') fft_St=fftshift(abs(fft(St)));
合成孔径雷达(SAR)的点目标仿真(附件带代码程序) 合成孔径雷达(SAR)的点目标仿真 一. SAR原理简介 合成孔径雷达(Synthetic Aperture Radar ,简称SAR)是一种高分辨率成像雷达技术。它利用脉冲压缩技术获得高的距离向分辨率,利用合成孔径原理获得高的方位向分辨率,从而获得大面积高分辨率雷达图像。SAR回波信号经距离向脉冲压缩后,雷达的距离分辨率由雷达发射信号带宽决定:,式中表示雷达的距离分辨率,表示雷达发射信号带宽,表示光速。同样,SAR回波信号经方位向合成孔径后,雷达的方位分辨率由雷达方位向的多谱勒带宽决定:,式中表示雷达的方位分辨率,表示雷达方位向多谱勒带宽,表示方位向SAR平台速度。 二. SAR的成像模式和空间几何关系 根据SAR波束照射的方式,SAR的典型成像模式有Stripmap(条带式),Spotlight(聚束式)和Scan(扫描模式),如图2.1。条带式成像是最早研究的成像模式,也是低分辨率成像最简单最有效的方式;聚束式成像是在一次飞行中,通过不同的视角对同一区域成像,因而能获得较高的分辨率;扫描模式成像较少使用,它的信号处理最复杂。 图2.1:SAR典型的成像模式 这里分析SAR点目标回波时,只讨论正侧式Stripmap SAR,正侧式表示SAR波束中心和SAR平台运动方向垂直,如图2.2,选取直角坐标系XYZ为参考坐标系,XOY平面为地平面;SAR平台距地平面高h,沿X轴正向以速度V匀速飞行;P点为SAR平台的位置矢量,设其坐标为(x,y,z);T点为目标的位置矢量,设其坐标为;由几何关系,目标与SAR平台的斜距为: (2.1) 由图可知:;令,其中为平台速度,s为慢时间变量(slow time),假设,其中表示SAR平台的x 坐标为的时刻;再令,表示目标与SAR的垂直斜距,重写2.1式为: (2.2) 就表示任意时刻时,目标与雷达的斜距。一般情况下,,于是2.2式可近似写为: (2.3) 可见,斜距是的函数,不同的目标,也不一样,但当目标距SAR较远时,在观测带内,可近似认为不变,即。
合成孔径雷达成像几何机理分析及处理方法研究合成孔径雷达作为二十世纪出现的尖端对地观测技术,由于它具有全天时、全天候的成像能力并能穿透一些地物,在土地覆盖制图、生态和农业、固体地球科学、水文、海冰等众多领域有着广泛的应用。随着未来更高分辨率、多极化、多波段、更优化的干涉测量设计的SAR系统的出现,合成孔径雷达遥感技术将会在更多的领域扮演更重要的角色。 合成孔径雷达遥感技术在我国有着极大的潜在应用市场,对于某些特殊问题的解决,例如西部困难地区的地形图测绘及南方阴雨地区地形图的快速更新,它甚至是唯一可行的解决之道。由于有关几何处理、辐射定标等基础问题没有很好地解决,影响了这一技术在我国的大规模应用及产业化进程。 本文致力于解决SAR影像的几何问题及与地形有关的辐射问题,对合成孔径雷达图像的几何特性作了系统深入的研究,以对构像方程的分析及推导为中心,研究并解决了包括地理编码、目标定位、影像模拟、利用控制点进行空间轨道精确重建、地形辐射影响的消除等一系列问题。为了加强对合成孔径雷达图像的理解,首先对合成孔径雷达成像的技术本质从数学上进行了简明阐述。 从信号处理的角度,分析了脉冲压缩的工作原理,解释了匹配滤波器的构造。分析了多普勒频率的特征及其作用。 从理论上推导了SAR距离向和方位向分辨率所能达到的极限值,并且指出了他们在实际中的限制。从系统的角度,分析了SAR距离向和方位向模糊度的限制。 构像方程是所有几何处理的基础。为推导了SAR构像方程,在定量分析了地球摄动力对卫星轨道影响的基础上,提出了一套改进的SAR轨道参数模型,与国外已有的模型相比,该模型更加简洁而且具有极高的精度。
合成孔径雷达干涉测量(InSAR)简述 摘要:本文主要介绍了合成孔径雷达干涉测量技术的发展简史、基本原理、及其3种基本模式,并且对其数据处理的基本步骤进行了概述。最后,还讲述合成孔径雷达干涉测量的主要应用,并对其未来发展进行了展望。 关键字:合成孔径雷达合成孔径雷达干涉测量微波遥感影像 1.发展简史 合成孔径雷达(Synthetic Aperture Radar,SAR)是一种高分辨率的二维成像雷达。它作为一种全新的对地观测技术,近20年来获得了巨大的发展,现已逐渐成为一种不可缺少的遥感手段。与传统的可见光、红外遥感技术相比,SAR 具有许多优越性,它属于微波遥感的范畴,可以穿透云层和甚至在一定程度上穿透雨区,而且具有不依赖于太阳作为照射源的特点,使其具有全天候、全天时的观测能力,这是其它任何遥感手段所不能比拟的;微波遥感还能在一定程度上穿透植被,可以提供可见光、红外遥感所得不到的某些新信息。随着SAR 遥感技术的不断发展与完善,它已经被成功应用于地质、水文、海洋、测绘、环境监测、农业、林业、气象、军事等领域。 L. C. Graham 于1974 年最先提出了合成孔径雷达干涉测量(InSAR )三维成像的概念,并用于金星测量和月球观察。后来Zebker、G. Fornaro及A. Pepe 等做出了进一步的研究,以解决InSAR 处理系统中有关基线估计、SAR 图像配准、相位解缠及DEM 生成等方面的问题。自1991 年7 月欧空局发射载有C 波段SAR 的卫星ERS- 1 以来,极大地促进了有关星载SAR 的InSAR 技术研究与应用。由于有了优质易得的InSAR 数据源,大批欧洲研究者加入到这个领域,亚洲(主要是日本)的一些研究者也开展了这方面的研究。日本于1992 年2 月发射了JERS- 1,加拿大于1995 年初发射了RADARSAT,特别是1995 年ERS- 2 发射后,ERS- 1 和ERS- 2 的串联运行极大地扩展了利用星载SAR 干涉的机会,为InSAR 技术的研究提供了数据保证。目前用于InSAR 技术研究的数据来源主要有:ERS- 1/2、SIR- C/X SAR、RADARSAT、JERS- 1、TOPSAR 和SEASAT 等。 1979年9月,我国自行研制的第一台合成孔径雷达原理样机在实验室完成,并在试飞中获得我国第一批SAR影像。1989年起国家科委设立了“合成孔径雷达遥感应用实验研究项目”,拉开了大规模雷达遥感研究的帷幕。目前国内外许多部门和科研机构正积极从事着InSAR 技术机理及其应用的研究,已经取得了许多成果,InSAR 技术的前景日益看好。 2.InSAR的基本原理 InSAR 技术是一门根据复雷达图像的相位数据来提取地面目标三维空间信息的技术。其基本思想是:利用两副天线同时成像或一副天线相隔一定时间重复成像,获取同一区域的复雷达图像对,由于两副天线与地面某一目标之间的距离
激光雷达原理 -------读书笔记 99121-19 邓洪川 一.概念: “雷达”(Radio Detection and Range,Radar)是一种利用电磁波探测目标位置的电子设备.电磁波其功能包括搜索目标和发现目标;测量其距离,速度,角位置等运动参数;测量目标反射率,散射截面和形状等特征参数。 传统的雷达是微波和毫米波波段的电磁波为载波的雷达。激光雷达以激光作为载波.可以用振幅、频率、相位和振幅来搭载信息,作为信息载体。 激光雷达利用激光光波来完成上述任务。可以采用非相干的能量接收方式,这主要是一脉冲计数为基础的测距雷达。还可以采用相干接收方式接收信号,通过后置信号处理实现探测。激光雷达和微波雷达并无本质区别,在原理框图上也十分类似,见下图 微波雷达 激光雷达 激光雷达由发射,接收和后置信号处理三部分和使此三部分协调工作的机构组成。激光光速发散角小,能量集中,探测灵敏度和分辨率高。多普勒频移大,可以探测从低速到高速的目标。天线和系统的尺寸可以作得很小。利用不同分子对特定波长得激光吸收、散射或荧光特性,可以探测不同的物质成分,这是激光雷达独有的特性。 目前,激光雷达的种类很多,但是按照现代的激光雷达的概念,常分为以下几种: (1)按激光波段分,有紫外激光雷达、可见激光雷达和红外激光雷达。 (2)按激光介质分,有气体激光雷达、固体激光雷达、半导体激光雷达和二极管激光泵 浦固体激光雷达等。 (3)按激光发射波形分,有脉冲激光雷达、连续波激光雷达和混合型激光雷达等。
(4) 按显示方式分,有模拟或数字显示激光雷达和成像激光雷达。 (5) 按运载平台分,有地基固定式激光雷达、车载激光雷达、机载激光雷达、船载激光 雷达、星载激光雷达、弹载激光雷达和手持式激光雷达等。 (6) 按功能分,有激光测距雷达、激光测速雷达、激光测角雷达和跟踪雷达、激光成像 雷达,激光目标指示器和生物激光雷达等。 (7) 按用途分,有激光测距仪、靶场激光雷达、火控激光雷达、跟踪识别激光雷达、多 功能战术激光雷达、侦毒激光雷达、导航激光雷达、气象激光雷达、侦毒和大气监测激光雷达等。 激光雷达的波长比微波断好几个数量级,又有更窄的波束。因此,于微波雷达相比,激光雷达具有如下优点: (1) 角分辨率高,速度分辨率高和距离分辨率高。采用距离-多普勒成像技术可 以得到运动目标的高分辨率的清晰图象。 (2) 抗干扰能力强,隐蔽性好;激光不受无线电波干扰,能穿越等离子鞘,低 仰角工作时,对地面多路径效率不敏感。激光束很窄,只有在被照射的那一点,那瞬间,才能被接收,所以激光雷达发射的激光被截获的概率很低。 (3) 激光雷达的波长短,可以在分子量级上对目标探测。这是微波雷达无能为 力的。 (4) 在功能相同的情况下,比微波雷达体积小,重量轻。 当然,激光雷达也有如下缺点: (1) 激光受大气及气象影响大。大气衰减和恶劣天气使作用距离降低。此外, 大气湍流会降低激光雷达的测量精度。 (2) 激光束窄,难以搜索目标和捕获目标。一般先有其他设备实施大空域、 快速粗捕目标,然后交由激光雷达对目标进行精密跟踪测量。 二.激光雷达作用距离方程 激光和微波统属电磁波,激光雷达作用距离方程的推导与微波雷达的推导是相似的。从微波雷达作用距离方程可以导出激光雷达方程: Sys Atm T T R D R R G P P ηηππδπ???=4442 2 2 式中,P R 是接收激光功率(W );P T 发射激光功率(W );G T 是发射天线增益;σ是目标散 射截面;D 是接收孔径(m );R 是激光雷达达到目标的距离(m );ηAtm 是单程大气传输系数;ηSys 是激光雷达的光学系统的传输系数。定义A R =πD 2是有效接收面积(m 2).式中还有: 24T T G θ π = 其中 D K a T λ θ= 两式中,θT 是发射激光的带宽;λ是发射激光的波长;K a 是孔径透光常数。 经过整理,式(1)变为
课程简介 Introduction 中国科学院电子学研究所 微波成像技术重点实验室 合成孔径雷达技术概论2015秋北京课程概况 课程名称:合成孔径雷达技术概论 S ynthetic A perture R adar Techniques 课程编号:101M5012H 课程属性:专业基础课 预修课程:数字信号处理、信号与系统、雷达原理学时学分:50/3
教学目的和要求: 本课程为信号与信息处理专业和遥感信息工程专业研究生的专业基础课,重点论述SAR信号处理基础、成像处理算法及其实现,为从事后续相关研究工作奠定基础。 合成孔径雷达技术概论2015秋北京课程概况 课程特点: * 授课形式: 课程讲授与课堂演示、课堂练习(数据处理的matlab演示与练习)相结合。 自带笔记本电脑,预装Matlab * 课后阅读:参考书目、研究文献 * 研究课题及研究报告:课后研究
授课内容: SAR基础理论及其信号处理基础 典型成像处理算法 多普勒参数估计 星地几何关系和SAR系统级几何定位 先进合成孔径雷达系统 合成孔径雷达技术概论2015秋北京课程概况 任课教师: * 洪文研究员、博导 * 林赟助理研究员、博士 * 刘佳音副研究员、博士
教学内容与安排:每周三下午/教1-406 第一讲合成孔径雷达成像基本原理 授课内容:概述雷达基础、合成孔径的概念、SAR信号特征、SAR的典型成像算法等 合成孔径雷达技术概论2015秋北京 课程概况 教学内容与安排: 第二讲信号处理基础(一) 授课内容:卷积、傅里叶变换、升采样、卷积的DFT Matlab演示与练习 第三讲信号处理基础(二) 授课内容:信号采样与插值 Matlab演示与练习
基于机理的合成孔径雷达系统成像误差理论分析 基于机理的合成孔径雷达系统成像误差理论分析① 葛咏王劲峰 (中国科学院地理科学与资源研究所资源与环境信息系统国家重点实验室,北京, 100101) 摘要:目前在遥感和G IS中,关于误差和不确定性研究的主要方法有两种:概率统计和机理 1 前言 尽管遥感为空间数据库获取数据十分迅速,但 我们对数据处理过程中误差的理解,尤其是多种空 间数据的集成中的误差了解甚少(L unet taeta l1, 1991).由于误差的存在降低了最终遥感图像的可信 度,同时也使遥感图像用于决策支持的范围受到了 限制.因此对可能的误差源,及其影响大小的分析 即成为一个重要的问题.目前关于误差和不确定性 研究的主要方法有两种:概率统计和机理模拟.概 率统计误差研究的主要原理是假设或经验求解最终 误差的分布函数形式,然后用一定的识别函数根据 一些已知点(监督点)值外推未知点值,并将其识 别函数统计误差和不确定性用一定的函数形式表达 出来.机理模拟首先应建立系统各环节的信息传递 函数,然后进行误差灵敏度分析,并且考虑在系统 元器件的工艺水平,经济价格和物质属性的约束条 件下,进行误差的最优控制,指导系统总体设计. 当前遥感误差研究主要是基于概率统计和证据 理论.如N ew com er和Sza jg in(1984),V erg in (1989),H euvelink(1989, 1993)等的不确定性分 析及史文中,刘文宝和张景雄等对遥感和G IS的位 置和属性不确定性分析.统计方法的优点是简单,适 用性强.但统计模型一般是描述性的,对观测数据 作经验性的统计描述,或者进行相关分析,不解答 为什么会有这样的结果(李小文, 1995;齐欢, 1996).鉴于此,本文提出了基于SA R系统机理的 误差分析方法.误差机理模型可以用来模拟全系统 的信息流,分析模拟各环境因素的影响,预测最终 识别对象的误差和不确定性,从而提高了SA R图像 的精度,并且指导系统优化设计.关键是必须对全 系统的物理原理有清晰的了解,并且建立起各环节 的信息传递函数. 这一问题的研究不仅有助于遥感信息提取和遥 感信息反演,而且对遥感数据的质量控制的研究,以 及合成孔径雷达的研制具有指导意义. 2 统计方法处理SA R成像误差
第30卷第3期电子与信息学报Vol.30No.3 2008年3月 Journal of Electronics & Information Technology Mar.2008 一种合成孔径雷达图像特征提取与目标识别的新方法 宦若虹①②杨汝良①岳晋①② ①(中国科学院电子学研究所北京 100080) ②(中国科学院研究生院北京 100039) 摘 要:该文提出了一种利用小波域主成分分析和支持向量机进行的合成孔径雷达图像特征提取与目标识别的新方法。该方法对图像小波分解后提取低频子带图像的主成分分量作为目标的特征,利用支持向量机进行分类完成目标识别。实验结果表明,该方法可以明显提高目标的正确识别率,是一种有效的合成孔径雷达图像特征提取和目标识别方法。 关键词:合成孔径雷达;小波变换;主成分分析;支持向量机;识别 中图分类号:TN957.52 文献标识码:A 文章编号:1009-5896(2008)03-0554-05 A New Method for Synthetic Aperture Radar Images Feature Extraction and Target Recognition Huan Ruo-hong①②Yang Ru-liang①Yue-Jin①② ①(Institute of Electronics, Chinese Academy of Sciences, Beijing 100080, China) ②(Graduate University of the Chinese Academy of Sciences, Beijing 100039, China) Abstract: This paper presents a new method for synthetic aperture radar images feature extraction and target recognition which based on principal component analysis in wavelet domain and support vector machine. After wavelet decomposition of a SAR image, feature extraction is implemented by picking up principal component of the low-frequency sub-band image. Then, support vector machine is used to perform target recognition. Results are presented to verify that, the correctness of recognition is enhanced obviously, and the method presented in this paper is a effective method for SAR images feature extraction and target recognition. Key words: Synthetic Aperture Radar (SAR); Wavelet transform; Principal Component Analysis (PCA); Support Vector Machine (SVM); Recognition 1引言 合成孔径雷达(Synthetic Aperture Radar,SAR)图像目标识别是SAR图像解译和分析的重要组成部分,具有重要的商业和军事价值,是国内外SAR图像处理和模式识别领域的研究热点。特征提取是SAR图像目标识别过程中最重要的一步。为了得到可靠的目标识别结果,用于识别的特征必须在分类空间上具有良好的类内凝聚性和类间差异性[1]。目标识别过程的另一个关键步骤是分类方法的选择,分类方法性能的优劣,直接影响到最后的识别结果。 本文提出了一种利用小波域主成分分析(Principal Component Analysis,PCA)和支持向量机[2](Support Vector Machine,SVM)进行的SAR图像特征提取和目标识别方法。对小波分解得到的低频子带图像进行主成分分析[3]提取目标特征,得到的特征向量用支持向量机分类完成目标识别。用MSTAR数据对该方法进行验证,结果表明,该方法可以有效地提高目标的正确识别率。 2006-08-15收到,2007-01-05改回2目标识别步骤 本文的识别过程如图1所示由3个步骤组成:(1)图像预处理。对图像数据进行规则化调整。(2)特征提取。通过二维离散小波变换将图像变换到不同分辨率下的小波域;对低频子带图像进行主成分分析后提取主成分分量作为目标的特征向量。(3)利用支持向量机进行分类。在特征向量所形成的低维特征空间上完成目标识别并输出识别结果。 图1 识别过程框图 3图像预处理 3.1实验数据 本文使用的图像数据是MSTAR项目组公布的3类SAR 地面静止军用目标数据,包括装甲车BMP2,装甲车BTR70