第6章 控制器原理
- 格式:doc
- 大小:365.00 KB
- 文档页数:13
第六章选择性控制系统6.1 概述所有控制系统可分为三类:物料平衡(或能量平衡)控制,质量控制和极限控制。
选择性控制属于极限控制一类。
它的特点是:在正常工况下,该参数不会超限,所以也不考虑对它进行直接控制;而在非常工况下,该参数会达到极限值,这时又要求采取强有力的控制手段,避免超限。
选择性控制系统又叫取代控制,也称超驰控制。
生产保护性措施的分类:硬保护和软保护1.硬保护参数达到第一极限时报警→设法排除故障→若没有及时排除故障,参数值会达到更严重的第二极限,经连锁装置动作,自动停车。
达到保护生产的目的。
2.软保护参数达到第一极限时报警→设法排除故障→在这同时,改变操作方式,按使该参数脱离极限值为主要控制目标进行控制,以防该参数进一步超限。
这种操作方式一般会使原有的控制质量降低,但能维持生产的继续运转,避免了停车。
当生产操作趋向极限条件时,用于控制不安全情况的控制系统将取代正常情况下工作的控制方案,直到生产操作重新回到安全范围时,正常情况下的控制方案又恢复对生产过程的正常控制。
要构成选择性控制,生产操作必须有一定选择性逻辑关系。
而选择性控制的实现则需要具有选择功能的自动选择器(高值选择器和低值选择器)或有关切换装置来完成。
6.2选择性控制系统的类型及应用6.2.1 开关型选择性控制系统定义:一般设有A、B两个可供选择的变量。
其中A是工艺操作的主要指标;另一个变量B,工艺上对它只有一个限值要求。
当B工作在限值以内时,生产过程按变量A进行连续控制,当B达到或超过限值时,选择控制系统将通过专门的装置切断A的输出,而控制阀迅速关闭或打开,直到B回到限值内,系统才重新恢复到按变量A进行连续控制。
开关型选择性控制系统一般都用作系统的限值保护。
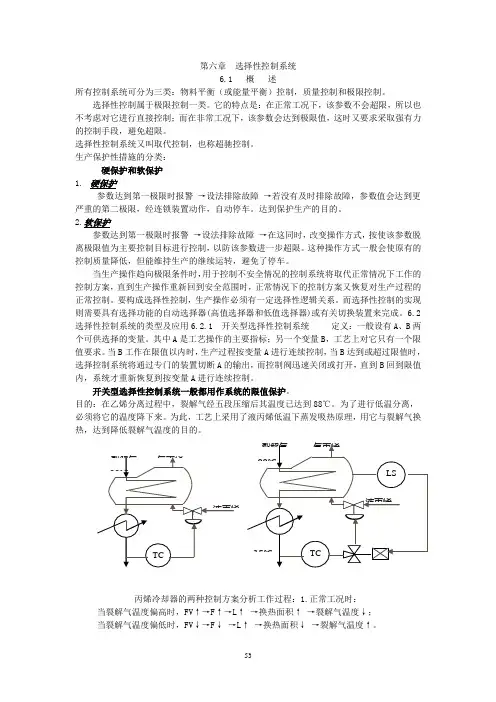
目的:在乙烯分离过程中,裂解气经五段压缩后其温度已达到88℃。
为了进行低温分离,必须将它的温度降下来。
为此,工艺上采用了液丙烯低温下蒸发吸热原理,用它与裂解气换热,达到降低裂解气温度的目的。
在线自测单元自测判断题第1章常用低压电器(判断下面说法的正、误)1、一台额定电压为220V的交流接触器在工频交流220V和直流220V的电源上均可使用。
2、交流接触器线圈通电后铁心吸合受阻,将导致线圈烧毁。
3、直流接触器比交流接触器更适合用于频繁操作的场合。
4、低压断路器又称为自动空气开关。
5、直流电磁铁励磁电流的大小与行程成正比。
6、闸刀开关可以用于分断堵转电动机。
7、低压断路器一般具有欠压、失压保护功能8、热继电器的额定电流就是其触点的额定电流。
9、只要外加电压不发生变化,交流电磁铁的吸力在吸合过程中是不变的。
10、在本质上,中间继电器不属于电压继电器。
对:2.3.4.7.第2章电气控制线路的基本控制环节1.全压启动的优点是电气设备少、线路简单、电流小。
2.电气安装图包括电器安装图和互连图两部分。
3、电动机星形降压启动瞬间,电流和启动转矩均为三角形启动时的1/3。
4、绕线式异步电动机启动时可在转子电路中串电阻,达到减小启动电流、增大启动转矩的目的。
5、电葫芦控制和车床拖板箱快速移动的电机控制通常采用带自锁的控制。
6、电动机的正反转控制电路中,连锁控制可有可无。
7、鼠笼式异步电动机的调速方法有变极调速、变频调速和变转差率调速。
8、常用的电气制动有能耗制动和再生发电制动。
9、多地控制同一台电动机时,启动控制按钮相串联,停止按钮相并联。
10、直流电动机一般只采用能耗制动和反接制动。
对:2.3.4.7.10.第3章机床电气控制系统1.钻床主轴的纵向进给是它的主运动。
2.“集零为整”的方法可用来检查整个控制电路是否有遗漏。
3、M7120型平面磨床工作台上电磁吸盘的作用是吸持工件。
4、T68型卧式镗床的运动主要有主运动、进给运动和辅助运动三种。
5、X62W型万能铣床的进给运动包括上、下、左、右四种。
6、镗床主拖动电动机低速运行时定子绕组接成双星形,高速运行时接成三角形。
7、机床电气控制系统故障分析和检查方法通常有5种。

第6章 控制器原理 主要内容:控制器的基本功能、控制器的基本组成、指令的执行过程、组合逻辑控制器组成原理与实现方法、微程序控制器组成原理与实现方法、控制方式。 重 点:指令的执行过程,组合逻辑控制器的组成原理与设计方法,微程序控制器的设计方法,微指令的格式,微程序流的控制。 难 点:指令的执行过程,组合逻辑控制器的组成原理与设计方法,微程序控制器的设计方法,微指令的格式,微程序流的控制。
控制器是计算机系统的指挥中心,它把运算器、存储器、输入/输出设备等部件组成一个有机的整体,然后根据指令的要求指挥全机各部分的工作。
6.1 控制器的基本功能及结构 6.1.1 控制器的功能 计算机之所以能快速、自动、连续工作,是由于控制器在程序的要求下不断对机器控制的结果。控制器的作用就是控制程序的执行,它必须具有以下基本功能: 1.取指令 2.分析指令 3.执行指令 4.控制程序和数据的输入与结果输出 5.随机事件和某些特殊请求的处理
6.1.2 控制器的组成 控制器是计算机的指挥中心,影响其组成的因素很多,如微操作序列部件的组成、指令系统与指令格式、控制方式等,尽管如此,但控制器的基本工作过程、基本组成还是相同的。图6-1是控制器的基本组成框图,主要包括以下几部分。
I/O状态信息 „„ 程序状态字寄存器 来 自 ALU 节拍发生器 启 停 线 路 脉 冲 源 „„ 译 码 器 操 作 码 地 址 码 微 操 作 序 列 形 成 部 件
地 址 形 成 电 路 程 序 计 数 器 PC +△
送MAR
或ALU
中 断 机 构 „ 中 断 源
图6-1 控制器基本结构
微 操 作 序 列 1.指令部件 指令部件的主要任务是完成取指令并分析指令。包括以下部分: (1)程序计数器PC:程序计数器又称指令计数器,用来存放当前指令或接下来要执行的指令的地址。 (2)指令寄存器IR:指令寄存器用来存放从存储器中取出的指令。 (3)指令译码器ID:指令译码器的功能是对指令寄存器中的指令操作码进行分析、解释,并产生相应的控制信号送给微操作形成部件。 2.时序部件 时序部件能产生一定的时序信号,以保证计算机的各功能部件有节奏的运行。 (1)脉冲源:用来产生一定频率和宽度的时钟脉冲信号作为整个机器的基准时序脉冲(也称为机器的主脉冲)。 (2)启停线路:可靠地开放或封锁脉冲,实现对计算机安全可靠的启动和停机。 (3)节拍信号发生器:其主要功能是按时间先后次序,周而复始地发出各个机器周期中的节拍信号,用来控制计算机完成每一步微操作。 3.微操作信号发生器 微操作是一个指令周期中最基本的不可再分割的操作,不同的机器指令具有不同的微操作序列。微操作信号发生器就是用来产生微操作序列。 4.中断机构 响应和处理中断的逻辑线路称为中断机构,负责处理异常情况和特殊请求。 由于大规模集成电路的发展,目前计算机的体系结构已有了很大的发展,一些先进的技术已引入计算机系统中,如指令预取、流水线等,在后面的章节中我们将在图6-1的基础上逐步介绍。
6.2 指令的执行过程 6.2.1 时序系统 时序系统是控制器的心脏,其功能是为指令的执行提供各种定时信号,通常由周期(分指令周期和机器周期两种)、节拍和工作脉冲组成。 1.指令周期和机器周期 指令周期—指执行一条指令(包括取指令、分析指令和执行指令)所需的全部时间,不同指令的指令周期是不同的。 机器周期—又可称作CPU周期,通常它是主存储器的一个访问周期。 2.节拍 在每个机器周期内要执行若干个微操作,这些操作可能需要分成几步完成,例如按变址方式读取操作数,先要进行变址运算才能访存读取。所以应把一个机器周期分为若干个相等的时间段,以便对应一个机器周期中规定的微操作,这样的每个时间段都对应一个电位信号,称为节拍电位信号。“节拍”是计算机操作的最小时间单位,又可称作时钟周期或T周期。 3.工作脉冲 节拍电位信号提供了一项操作所需要的时间分段,它是信息的载体,在数据通路传输中起着开门或关门的作用,但在一个节拍中,有的操作还需要严格的定时脉冲,如将稳定的运算结果打入寄存器、机器周期状态切换等。所以在一个节拍之内往往还需要设置几个工作脉冲,作为各种同步脉冲的来源。 … „ PC MAR MDR R0
RN-1 …
控制信号形成部件 ID IR
微操作控制信号
ALU Z
Y ADD SUB
图6-2 模型机的数据通路 至地址总线
至数据总线 1→C0
6.2.2 指令的执行过程 一条指令的执行通常都可以分为三个阶段,即取指令、分析指令和执行指令。 1.取指令 具体的操作如下: (1)将程序的启动地址,即第一条指令的地址置于程序计数器PC中。 (2)将PC中的内容送至主存的地址寄存器MAR,并送地址总线AB。 (3)向存储器发读命令。读取指令时CPU是空闲的,利用这段时间完成PC+△的操作,为指令的连续运行做准备。 (4)从主存中取出的指令经过主存的数据寄存器MDR,再经过数据总线进入CPU中的指令寄存器中。 2.分析指令 取出指令后指令译码器对保存在IR中的指令操作码进行译码,产生译码信号并送微操作序列形成部件,进而产生微操作序列送运算器、存储器、外设及控制器本身。 3.执行指令 根据分析指令阶段所产生的微操作序列,控制运算器、存储器、外设及控制器本身完成指令规定的各种操作。
6.2.3 指令的执行过程举例 我们知道,控制器在实现一条指令的功能时,总是把每条指令分解成一系列时间上先后有序的最基本、最简单的微操作,即微操作序列。通过一个简单的模型机来看具体指令的执行过程,即指令的微操作序列。 1.数据通路 假设某机的数据通路如图6-2所示。其中ALU为运算器,Y为其输入端的一个暂存器,Z用来保存其输出结果;PC为程序计数器;IR、ID分别为指令寄存器和指令译码器;MAR、MDR分别为存储地址寄存器和存储数据寄存器;R0至RN-1
为模型机的N个寄存器。
2.加法指令ADD R1,[NUM] 这条指令完成的功能是将指令中出现的地址NUM送到主存以取得第一个操作数,再与R1的内容相加,最后将结果送回R1中。即实现:(NUM)+(R1)→R1 相应的微操作如下: (1)PCout、MARin、READ、在数据没取出的间隙进行PC+1(0→Y,1→C0,ADD,Zin); (2)Zout、PCin、WMFC(等待存储功能完成); (3)MDRout、IRin; (4)IR(D)out、MARin、READ; (5)R1out、Yin、WMFC; (6)MDRout、ADD、Zin; (7)Zout、R1in; (8)END。 3.转移指令JZ A 这是一条条件转移指令,若上次运算结果为0(ZF=1),就转移,转移地址为A;若上次运算结果不为0(ZF=0),就顺序执行下一条指令。相应的微操作序列如下: (1)PCout、MARin、READ、在数据没取出的间隙进行PC+1(0→Y,1→C0,ADD,Zin); (2)Zout、PCin、WMFC(等待存储功能完成); (3)MDRout、IRin (4)IF ZF=1 THEN IR(D)out、PCin (5)END。
6.3 硬布线控制器的组成原理与实现方法 硬布线控制器又称为组合逻辑控制器,是早期设计计算机的一种方法。 6.3.1 硬布线控制器的组成原理 1.硬布线控制器的原理 图6-3是硬布线控制器的结构方框图。逻辑网络的输入信号来源有三个:(1)指令操作码译码器的输出In;(2)来自时序发生器的节拍电位信号Tk;(3)来自执行部件的反馈信号Bj。逻辑网络的输出信号就是微操作控制信号,用来对执行部件进行控制。 Cm=f(In,Mi,Tk,Bj) 2.组合逻辑控制器的设计步骤: (1)绘制指令流程图 以指令为线索,按指令类型分类,将每条指令归纳成若干微操作,然后根据操作的先后次序画出流程图。 (2)安排指令操作时间表 指令流程图的进一步具体化,把每一条指令的微操作序列分配到各个机器周期的各个时序节拍信号上。要求尽量多地安排公共操作,避免出现互斥。 (3)安排微命令表 以微命令为依据,表示在哪个机器周期的哪个节拍有哪些指令要求这些微命令。 (4)进行微操作逻辑综合 根据微操作时间表,将执行某一微操作的所有条件(哪条指令、哪个机器周期、哪个节拍和脉冲等)都考虑在内,加以分类组合,列出各微操作产生的逻辑表达式,并加以简化。
… C1 C2 Ck
B1 B2
Bj
模k 计数器 计数启停
复 位 时 钟
1/k译码器 „ T1 T2 Tk
组合逻辑网络 I1
I2
IN …
指 令 译 码 器 操 作 码 地 址 码 IR 执行
部件的反馈信号
„
图6-3 硬布线控制器的结构方框图