
液压挖掘机的三种流量控制方式
摘要:在液压挖掘机的负载适应控制策略中,负流量(Negative Flow Control)、正流量控制(Positive Flow Control)及负荷传感器控制(Load Sensing Control)三种流量控制方式的流行称谓,是按其泵控特性来分类的。本文通过对多种厂牌型号挖掘机的比较分析,提出了旁通流量控制(By-pass Flow Control)、先导传感控制(Pilot Sensing Control)及负荷传感控制的分类。这一分类方法,对于设计时比较不同控制系统的性能和维修时理解不同控制系统结构和功能的特点,都有所裨益。
1.流量控制
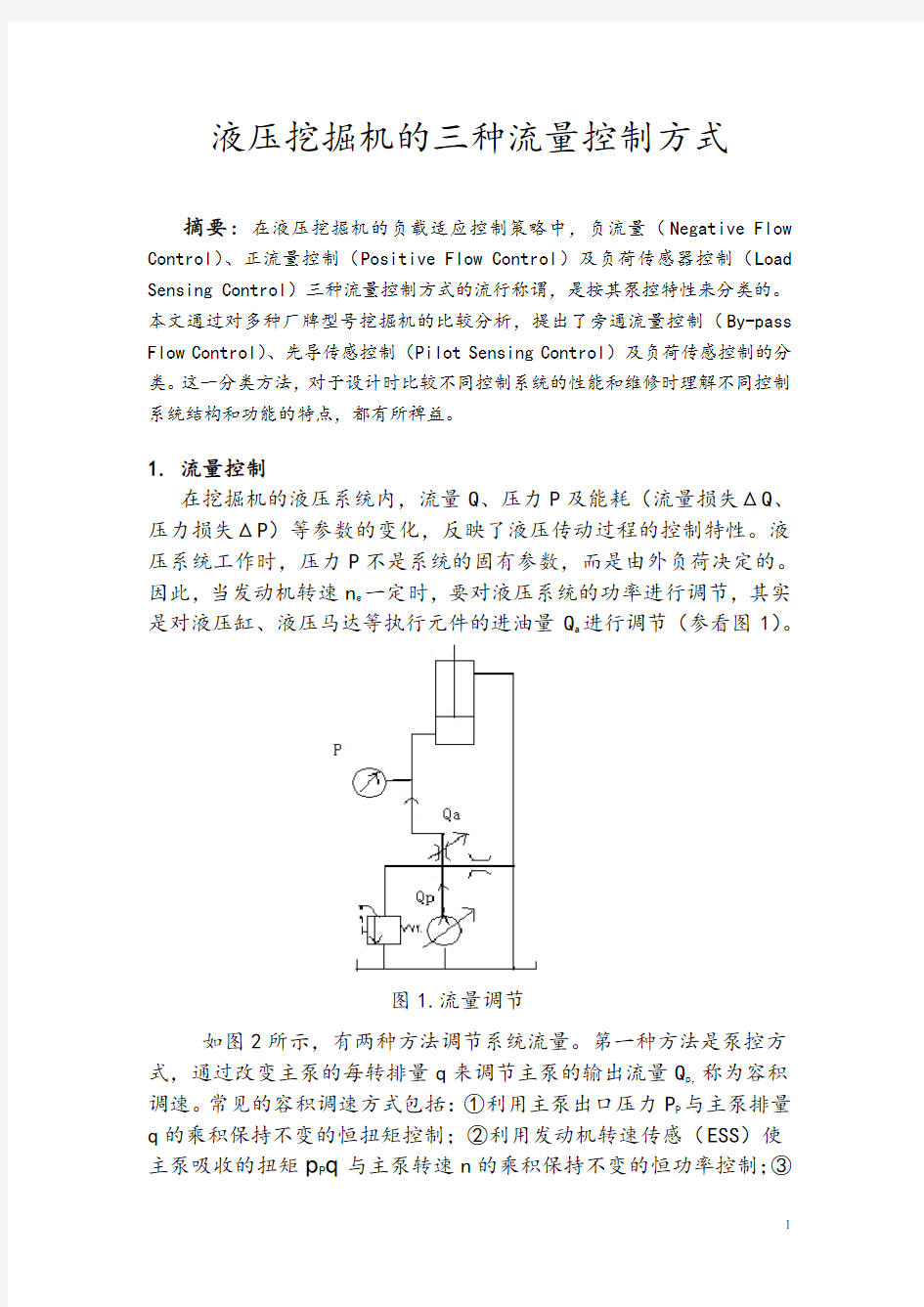
在挖掘机的液压系统内,流量Q、压力P及能耗(流量损失ΔQ、压力损失ΔP)等参数的变化,反映了液压传动过程的控制特性。液压系统工作时,压力P不是系统的固有参数,而是由外负荷决定的。因此,当发动机转速n e一定时,要对液压系统的功率进行调节,其实是对液压缸、液压马达等执行元件的进油量Q a进行调节(参看图1)。
图1.流量调节
如图2所示,有两种方法调节系统流量。第一种方法是泵控方式,通过改变主泵的每转排量q来调节主泵的输出流量Q p,称为容积调速。常见的容积调速方式包括:①利用主泵出口压力P P与主泵排量q的乘积保持不变的恒扭矩控制;②利用发动机转速传感(ESS)使主泵吸收的扭矩p P q与主泵转速n的乘积保持不变的恒功率控制;③
在临近系统溢流压力时,减小主泵排量的压力切断控制;④配用破碎头等作业附件时,由外部指令限定主泵最大排量的最大流量二段控制;⑤双泵系统中,利用两泵出口压力的平均值与主泵流量乘积保持不变的交叉功率控制(相加控制或总功率控制);⑥多泵系统中,因主泵组的液压总功率大于发动机的输出功率,为防止发动机出现失速,采用了极限负荷控制。
除了容积调速,还有一种泵控方式是通过动力模式下的变功率控制,利用外部指令设定不同工况下不同的发动机输出功率来改变主泵转速n e,从而调节主泵输出流量Q=nq。
调节系统流量的第二种方法是阀控方式,可对主泵输出的流量进行二次调节。这种通过改变主控阀开度来调节执行元件的进油量,称为节流调速。常见的节流调速采用操作手柄(踏板)先导阀输出的二次先导压力来调节主控阀的开度。
除了节流调速,还有其他多种阀控方式来调节执行元件的进油量,例如:在不同作业模式下,利用外部指令对双泵合流与分流的控制;动臂再生控制与斗杆再生控制;直线行走控制;复合作业时的动臂优先控制或回转优先控制等等。
容积调速的传动效率高,但是动特性差。节流调速动特性好,但是传动效率低。因此,在液压挖掘机上同时采用了容积调速与节流调节,以适应作业中执行元件对流量的需求。不唯如此,为实现节能,还要使容积调速时对主泵的控制与节流调速时对主控阀的控制协调起来,泵控对阀控实时响应。就是说,当主控阀的节流开度关小时,主泵的排量也要立即关小,反之亦然。这种按需供油的泵阀联合控制被称为流量控制。
在液压挖掘机上,采用了三种流量控制方式:旁通流量控制、先导传感控制及负荷传感控制。表1列出了部分厂牌机型采用的流量控制方式。
图2 液压挖掘机的流量调节
表1 液压挖掘机的流量控制方式举例
注: BF—旁通流量控制 PS—先导传感控制 LS—负荷传感控制 N—负流量控制E/N—电子负流量控制P—正流量控制E/P—电子正流量控制
2..旁通流量控制
典型的旁通流量控制如图3所示。要实现旁通流量控制,液压系统在结构上应同时具备以下三个条件:①主控阀为中位开路的三位六通阀,主控阀的各叠加阀的进油路为串并联;②在主控阀中位旁通回油路的底端设置有节流元件,同时并联有低压溢流阀。在节流元件进油口设置取压口,提取该点压力,作为流量控制的信号压力Pi。用于旁通流量控制的主控阀有如川崎的KMX系列控制阀、东芝的DX22/28型和UDX36型控制阀;③主泵的控制特性一般应为负流量控制(日立EX—5系列除外),即主泵的流量变化ΔQ P与信号压力的变化ΔPi成反比,而且主泵的负流量控制阀(NC阀)在主泵调节器上的位置,应确保恒扭矩控制(TVC)优先。用于旁通流量控制的主泵有如川崎的K3V和K5V系列柱塞泵。
图3 川崎的负流量控制
2.1旁通流量控制的原理
如图3所示,旁路节流阀的节流口前后压差
ΔP=Pi=Q R2/KA
式中 Pi—回油节流口前的压力。略去回油的背压时,ΔP=Pi。 Q R—主控阀中位回油流量(m3/s)。
A—回油节流口通流面积(m2).
K—常数,与节流口的收缩系数、速度系数、油液重度等有关,K由实验决定。
对于具体的回油节流阀结构,A、K为一定数,旁通流量Q R与Pi 的关系如图4第四象限所示:Q R越大,Pi越大,Q R与Pi呈抛物线的函数关系。
图4 负流量控制的流量特性
当主控阀各阀芯均处于中位时,Q R最大,控制压力Pi也最大,其值由旁路溢流阀调定(参看图3),此时主泵流量Q P最小为Qpo,如图4第一象限所示。以装用川崎精机KMX15R主阀的系统为例,旁通流量Q R最大为30L/min,此时旁通溢流阀开启,控制压力Pi达到最大值3.5MPa。
当主控阀的阀芯开度达到执行元件进油量Q A与主泵供油量Q P相等时,中位旁通回油流量Q R接近于0,控制压力Pi变得很小,主泵流量Q P已调到最大,如图4第二象限所示。主控阀芯行程改变时,控制压力Pi随动变化,执行元件的进油量Q A为主泵供油量Q P与旁通流量Q R之差,参看图4第二象限。
表2列出了采用旁通流量控制的部分厂牌与机型。
表2 典型的旁通流量控制
成反比。
2.2旁通流量控制阀
斗山DH-5系列挖掘机的旁通流量控制阀如图5所示。节流孔C前端压力fp传送到主泵调节器上。当fp超过弹簧B设定的压力时,旁通油路溢流,这样可防止在主控阀所有滑阀都位于中位时,负控压力fp的急剧升高。
图5 东芝的负流量控制阀
卡特320C型挖掘机的旁通流量控制阀如图6所示。旁通回路的压力油通过8个小孔a节流后流回油箱。节流孔a前端压力P N被引入主泵调节器。当P N压力超过弹簧C设定的压力后,提动阀b打开溢流。
图6 卡特的流量控制阀
现代R—7系列的旁通流量控制阀如图7所示。旁通油路21的压
力油经过锥阀15中心的小孔节流,形成负控压力F L。当F L高于弹簧16设定的压力时,锥阀15将开启溢流,旁通油全部流入回油通道13.
图7 现代的负控阀
2.3小松的OLSS系统
1981年以后,小松公司在PC400—1,PC650—1及40t级以下的PC—3、PC—5系列挖掘机上,采用了OLSS系统(Opened Center Load Sensing System中位开式负荷传感系统),如图8所示。OLSS系统并非本文所述的负荷传感系统,而是早期的旁通流量控制系统。
图8 小松的OLSS系统
射流传感器如图9所示。主控阀中位旁通油流Qc从元件1的小孔do以射流形态喷出,大部分射流碰到螺套2的端面,其压力Pd(背压)接近油箱压力;小部分射流经小孔d1,流入螺套2的B腔,由于d1<d0,这部分射流的动压力被节流减压后成为射流压力Pt与Pd。
图9 射流传感器
射流传感器输出的压差(Pt-Pd)与旁通流量Qc的关系如图10曲线a段所示。当操作手柄处于中位,旁通流量超过40L/min时,溢流阀3开启(图9),压差稳定在1.5MPa左右,如图10直线b段所示,此时主泵排量最小。
压力Pt与Pd由软管传到主泵的NC阀二端(参看图8),通过NC 阀对主泵排量进行控制。压差(Pt-Pd)与主泵排量Q呈反比关系(参看表2)。
图10 射流传感器的输出特性
2.4神钢SK-6的电子负流量控制系统
前述旁通流量控制的节流元件,是直接用机械—液压的结构提取压力(压差)信号来实现控制压力(压差)与主泵流量的比例控制,不可避免的存在静态误差,影响系统的调速性能。2000年,神钢公司在SK—6系列挖掘机上,采用电液比例技术将控制压差(Pn—Tn)的电信号传送到机电控制器,经过控制算法处理后,再通过比例阀控制主泵排量,如图11所示。
图11 神钢SK—6的电子负流量控制系统两个主泵供油压力P1和P2由高压压力传感器变送为信号电压,经过机电控制器对泵压信号处理后,平均压力(P1+P2)/2(电压U)与主泵流量Q的关系如图12所示。设恒功率控制下某一工况P1(P2)泵输出的流量为Q′。当主控阀开度变化后,旁通流量随之改变,负控节流阀输出的压差(Pn-Tn)也就变化。
通过机电控制器对负控信号处理后,压差(Pn-Tn)(电压U)对主泵流量Q′进行调制,如图13所示。
通过电子负流量控制,只要执行元件的进油量减小,主泵的排量
Q′就会立即减小,反之亦然。
图12 交叉功率控制特性图13 负流量控制特性
2.5斗山的电子负流量控制系统
斗山(大宇)DH—3/5系列挖掘机采用川崎的K3V主泵和东芝的DX22/28或UDX36型主控阀。当主控阀的滑阀从中立位置移到工作位置时,旁通流量与负流量控制压力P N会突然减小,使主泵流量急剧增加,液压缸等执行元件的速度突增,引起挖掘机抖动。
图14 DH—3系列挖掘机的电子负流量控制
为改善执行元件动作起点时泵流量的突变,在EPPR比例阀组上
(参看图14)可选装一个称为“负流量控制优先阀”的电液比例阀A3。在单独操作行走、动臂提升、斗杆等任一动作时,EPOS控制器在1秒内向A3输出700~150mA递减的斜坡信号电流,优先阀A3会对应输出3.2—0MPa递减的斜坡控制油压Pa。通过梭阀VS,对动作起点的负流量控制阀NR输出的压力P N和优先阀A3输出的压力Pa比较后,选择P N与Pa的较高者作为旁通流量控制压力Pi,去调节主泵排量,从而降低了泵流量变化的梯度,如图15所示。
图15 斗山DH220—3的负流量控制特性
2.6 日立EX—5的正流量控制系统
日立建机在EX—5系列上采用了正流量控制系统,泵流量控制阀在油路上的位置如图16所示。2000年,日立推出的ZX系列也采用了正流量控制系统,但泵流量控制阀的结构和安装位置有很大的差异(参看图20),虽然都称之为正流量控制,,但二者流量控制的机理却全然不同:EX—5采用的是旁通流量控制,而ZX采用的是先导传感控制,详见后述。
图16 日立EX—5的旁通流量控制
EX—5的泵流量控制阀包括泵控制阀A和减压阀B,如图17所示。当控制阀开度变小,旁通流量Qd增大时,泵控制阀的滑阀A向右移动,调节阀B的设定压力降低,来自先导泵的初级先导压力被调压阀B分流而输出较低的控制压力Pi。控制压力Pi被传到主泵调节器,使泵排量按Pi压力成正比减小,因此称为正流量控制(参看表2)。
在这里,阀A用于检测旁通流量,阀B的作用则相当于逻辑电路的“非门”。先导泵提供控制压力源,初级先导压力经过阀B的调制而成为旁通流量控制的信号压力。
EX—5采用的是正流量控制。这一实例表明旁通流量控制多为负流量控制也有正流量控制。但是,先导传感控制却都是正流量控制(参看表3)。
图17 日立EX—5泵流量控制阀的工作原理
3.先导传感控制
典型的先导传感控制系统如图18所示。要实现先导传感控制,液压系统在结构上应同时具备以下三个条件:①主控阀为中位开路的三位六通阀,主控阀的各叠加阀的进油路为串并联。不过,为减小液动力的影响,增大调速范围,改善滑阀的静特性,提高微调性能,对主控阀阀芯台肩切口的形状尺寸、封油长度与开口量的比例,都进行了优化设计;②用梭阀链对各操作阀输出的二次先导压力进行比较,选择其中最高的先导压力Pi作为先导传感控制的信号压力;③主泵的控制特性为正流量控制,即主泵的流量变化ΔQp应与先导传感的控制压力的变化ΔPi成正比,而且主泵的调节器应使恒扭矩控制优先于流量控制。
力士乐公司的A8VSO系列主泵和M8、M9系列主控阀,川崎的K3VDIP 系列主泵和KMxRA系列主控阀,都适于构建先导传感控制系统。
表3列出了采用先导传感控制的部分厂牌机型。
图18 先导传感控制系统表3 典型的先导传感控制
3.1先导传感控制的流量特性
先导传感控制的流量特性如图19所示。Qp为主泵供油流量,Qpo 是主泵的最小流量(备用流量),Qp′是由泵出口压力与发动机转速决定的主泵最大流量。Qa为执行元件的进油流量。Pis是主泵的起调控制压力,Pie为主泵的终调控制压力。
图19 先导传感控制的流量特性曲线
3.2日立ZX的正流量控制系统
如图20所示,在先导操作阀的集油板(信号控制阀)内,通过梭阀1~17组成的梭阀链,对各个二次先导压力Ps比较后,选取复合操作时的最高先导压力Psmax。
图20 信号控制阀
Psmax传到泵流量控制阀(参看图21)的弹簧室内,推动阀柱。来自先导泵的初级先导压力Pc,经过阀柱打开的阀口节流后,流向油口S A。二次先导压力Psmax越大,Pi越大。最后,由软管将流量控制压力Pi传到主泵调节器上。
图21 ZX的泵流量控制阀
当流量控制压力Pi传到调节器右端时(参看图22),推动控制活塞4向左移动。于是,伺服活塞10大腔的油被阀芯3节流后,再从Dr油口流回油箱,而活塞10在右端的先导压力作用下将向左移动,将主泵的排量调大。Pi越大,伺服活塞向左的行程越大,主泵排量越大,这种正流量控制的特性如图23所示。
图22 ZX的主泵调节器
图23上泵流量Q′是在某一工况下,由左右主泵输出的平均压力(Pd1+Pd2)/2和由发动机转速决定的功率变换比例阀输出压力Pps 决定的最大泵油量。先导传感压力Pi则通过正流量控制滑阀3(参看图22),对流量Q′再次进行调制。
图23 ZX的泵流量控制特性
中文题目:XE40小型挖掘机液压系统设计 外文题目:DESIGN HYDRAULIC SYSTEM OF XE40 SMALL CRAWLER EXCAVATOR 毕业设计(论文)共 76 页(其中:外文文献及译文 8 页)图纸共 11 张完成日期 2015年 6 月答辩日期2015 年 6 月
辽宁工程技术大学 本科毕业设计(论文)学生诚信承诺保证书 本人郑重承诺:《》毕业设计(论文)的内容真实、可靠,系本人在指导教师的指导下,独立完成。如果存在弄虚作假、抄袭的情况,本人承担全部责任。 学生签名: 年月日 辽宁工程技术大学 本科毕业设计(论文)指导教师诚信承诺保证书本人郑重承诺:我已按学校相关规定对同学的毕业设计(论文)的选题与内容进行了指导和审核,确认由该生独立完成。如果存在弄虚作假、抄袭的情况,本人承担指导教师相关责任。 指导教师签名: 年月日
摘要 XE40小型挖掘机是徐工生产的小型液压挖掘机,本次的毕业设计的课题就是对其进行液压系统的参数化设计。为了研究这个课题,我们的主要的思路就是要先根据已知的挖掘机的性能参数对工作速度和工作压力进行初步的确定,再根据这些数据,对铲斗缸进行参数计算。参考所选液压缸的连接方式和XE40小型挖掘机选用的液压缸的具体形状,绘制出液压缸的CAD图。依照铲斗缸的设计方式与计算流程同理也能设计出斗杆缸和动臂缸。同时根据所设计的挖掘机所选用的动臂缸的数量,就能大致确定出运作液压缸所需要的流量。通过已确定的流量,工作压力,还有工作速度,就能初步确定液压泵的型号和液压马达的型号。然后再参考徐工挖掘机XE40的液压系统,根据系统回路和对挖掘机工作方式的了解,初步设计出液压挖掘机系统的原理图,并用CAD绘制出来。经过审核之后,再来确定所要要用的液压油,发动机,以及对液压阀进行选型。 关键词:液压缸;参数化设计;徐工挖掘机;液压系统
中国地质大学长城学院 本科毕业设计外文资料翻译 系别:工程技术系 专业:机械设计制造及其自动化 姓名:吴宝生 学号: 05211615 2015 年 1 月 22 日
国内外小型挖掘机发展综述 1液压挖掘机简介 液压挖掘机是由发动机、液压系统、工作装置、行走装置和电气控制等部分组成。液压系统由液压泵、控制阀、液压缸、液压马达、管路、油箱等组成。电气控制系统包括监控盘、发动机控制系统、泵控制系统、各类传感器、电磁阀等。液压挖掘机一般由工作装置、回转装置和行走装置三大部分组成。根据其构造和用途可以区分为:履带式、轮胎式、步履式、全液压、半液压、全回转、非全回转、通用型、专用型、铰接式、伸缩臂式等多种类型。 工作装置是直接完成挖掘任务的装置。它由动臂、斗杆、铲斗等三部分铰接而成。动臂起落、斗杆伸缩和铲斗转动都用往复式双作用液压缸控制。为了适应各种不同施工作业的需要,液压挖掘机可以配装多种工作装置,如挖掘、起重、装载、平整、夹钳、推土、冲击锤等多种作业机具。 回转与行走装置是液压挖掘机的机体,转台上部设有动力装置和传动系统。发动机是液压挖掘机的动力源,大多采用柴油要在方便的场地,也可改用电动机。 液压传动系统通过液压泵将发动机的动力传递给液压马达、液压缸等执行元件,推动工作装置动作,从而完成各种作业。以工地使用较多的PV-200型液压挖掘机为例。该机采用改进型的开式中心负荷传感系统(OLSS)。该系统用控制斜盘式变量柱塞泵斜盘角(输出流量)的方法,减少了发动机的功率输出,从而减少燃油消耗,是一种节能型系统。这种液压系统的特点是:定转矩控制,能维持液压泵驱动转矩不变,载断控制,可以减少作业时间的卸荷损失;油量控制,可减少空挡和小调控制时液压泵的输出流量,减少功率损失。 械到电力驱动和内燃机驱动回转挖掘机、应用机电液一体化技术的全自动液压挖掘机的逐步发展过程。由于液压技术的应用,20世纪40年代有了在拖拉机上配装液压反铲的悬挂式机械,20世纪50年代初期和中期相继研制出拖式全回转液压挖掘机和履带式全液压机械。初期试制的液压挖掘机是采用飞机和机床的液压技术,缺少适用于机械各种工况的液压元件,制造质量不够稳定,配套件也不齐全。从20世纪60年代起,液压挖掘机进入推广和蓬勃发展阶段,各国机械制造厂和品种增加很快,产量猛增。1968-1970年间,液压挖掘机产量已占机械总产量的83%,目前已接近100%。 2小型挖掘机的发展及其趋势 20 世纪80~90 年代小型挖掘机在市政工程、交通、管道等施工中发挥了较大优势并得以迅速发展。它在城市的土建施工工程中为节省人力、物力出了较大贡献 , 逐步成为城市施工中具有代表性的施工机械。 小型挖掘机的发展主要依赖于城市建设的发展,由于城市的改造、建设施工较多,要求施工时间短、施工机械对周围环境影响小、安全、低污染、回转半径小、便于运输以
( 操作规程 ) 单位:_________________________ 姓名:_________________________ 日期:_________________________ 精品文档 / Word文档 / 文字可改 2020版液压挖掘机的操作规程 Safety operating procedures refer to documents describing all aspects of work steps and operating procedures that comply with production safety laws and regulations.
2020版液压挖掘机的操作规程 作业前的技术准备 1)发动机部分,按通用操作规程的有关规定执行。 2)发动机启动或操作前应发出信号。 3)检查液压系统有无渗漏;轮胎式挖掘机应检查其轮胎是否完好、气压是否符合规定;检查传动装置、制动系统、回转机构及仪器、仪表、并经试运转,确认正常后方允许进入作业状态。 4)详细了解施工任务和现场情况。检查挖掘机停机处土壤的坚实性和稳定性,轮胎式挖掘机应加支撑,以保持其平稳、可靠。检查路堑和沟槽边坡的稳定情况,防止挖掘机倾覆。 5)严禁区任何人员在挖掘机作业区内滞留。禁止无关人员进入驾驶室。 6)挖掘机作业现场应有自卸车进出的道路。
作业与行驶中的技术要求 1)挖掘机作业时禁止任何人上、下挖掘机和传递物品,不准边作业边保养、维修;不要随意调整发动机(调速器)以及液压系统、电控系统;要注意选择和创造合理的作业面,严禁掏洞挖掘。 2)挖掘机卸料时应待自卸车停稳后进行;卸料时在不碰撞自卸车任何部位的情况下,应昼降低铲斗高度;禁铲斗从自卸车驾驶室上方越过。 3)禁止利用铲斗击碎坚固物体;如遇到较大石块或坚硬物体时,应先清除后继续作业;禁止挖掘示经爆破的5级以上的岩石。 4)禁止将挖掘机布置在上、下两个挖掘段内同时作业;挖掘机在工作面内移动时应先平整地面,并清除通道内的障碍物。 5)禁止用铲斗油缸全伸出方法顶起挖掘机。铲斗没有离开地面时挖掘机不能作横行行驶或回转运动。 6)禁止用挖掘机动臂横向拖拉他物;液压挖掘机不能用冲击方法进行挖掘。 7)挖掘机在作回转运动时,不能对回转手柄作相反方向的操作。
液压挖掘机智能化控制系统 余会挺,李丽 (煤炭科学研究总院上海分院,上海200030) 摘 要: 提出一种基于模糊算法和遗传算法相结合的自适应控制方法,对挖掘机的挖掘轨迹进行自动控制,取得了较好的应用效果。 关键词: 矿山;挖掘机;遗传算法;模糊控制 中图分类号:T D422.2+2 文献标识码:B 文章编号:1001-0874(2008)05-0031-04 I nte lli gent Contr o l System of Hydrauli c Excava t o r YU Hui2ting,L I L i (Shanghai B ranch of China Coal Research I nstitute,Shanghai200030,China) Ab s trac t: A fuzzy self2steering tracing contr ol syste m of hydraulic excavat or based on combinati on of fuzzy algorith m with genetic algorithm is p r oposed.The good efficiency of p resented method app lied t o s ome excavat ors has already been shown. Keywo rd s: m ine;excavat or;genetic algorith m;fuzzy contr ol 1 引言 随着科学技术的迅猛发展,智能化控制成为挖掘机技术发展的主要课题之一[1]。随着液压传动技术的发展及液压部件的质量提高、成本的降低,上世纪80年代,液压挖掘机替代了机械式挖掘机。液压挖掘机具有重量轻、体积小、结构紧凑、传动平稳、操纵简单、以及容易实现无级变速和自动控制等一系列优点。随着计算机技术、电子技术、传感器技术、机电一体化技术的发展,液压挖掘机正向着高效率、高可靠性、安全节能及自动化、智能化的方向发展[2]。 本文对液压挖掘机工作装置轨迹智能化控制进行研究。 2 挖掘机工作装置 (1)结构 液压挖掘机工作装置是由动臂、斗杆、铲斗和液压油缸等构成的连杆机构,通过电液控制系统控制液压油缸的伸缩实现运动控制[3]。挖掘机工作装置电液驱动控制系统的控制模型结构如图1所示,并在作业过程中采用通过电磁比例先导阀控制多路换向阀的方法 。 图1 挖掘机电液驱动控制系统图 图2 挖掘轨迹控制图 (2)轨迹控制原理 挖掘机工作装置轨迹控制系统由电液伺服系统、控制器、压力传感器、角度传感器、操作手柄、人机交互模块(上位机)等组成。在液压油缸驱动下 控制动臂角θ 1 、斗杆角θ 2 、铲斗角θ 3 (图2),实现挖掘机工作装置轨迹控制。控制器预先设定工作装置的运行轨迹,通过编程将其离散化。在实时控制时, 采集角度传感器测得的转角θ 1 、θ 2 、θ 3 ;将其与设定
液压挖掘机行走操作及安全使用注意事项示范文本 In The Actual Work Production Management, In Order To Ensure The Smooth Progress Of The Process, And Consider The Relationship Between Each Link, The Specific Requirements Of Each Link To Achieve Risk Control And Planning 某某管理中心 XX年XX月
液压挖掘机行走操作及安全使用注意事 项示范文本 使用指引:此管理制度资料应用在实际工作生产管理中为了保障过程顺利推进,同时考虑各个环节之间的关系,每个环节实现的具体要求而进行的风险控制与规划,并将危害降低到最小,文档经过下载可进行自定义修改,请根据实际需求进行调整与使用。 1)挖掘机起步前应检查环境安全情况、清理道路上的 障碍物,无关人员离开挖掘机,然后提升铲斗。 2)准备工作结束后驾驶员应先按喇叭,然后操作挖掘 机起步。 3)行走杆操作之前应先检查履带架的方向,尽量争取 挖掘机向前行走。如果驱动轮在前,行走杆应向后操作。 4)如果行走杆在低速范围内挖掘机起步,发动机转速 会突然升高,因此驾驶员要小心操作行走杆菌。 5)挖掘机倒车时要留意车后空间,注意挖掘机后面盲 区,必要时请专人指挥予以协助。 6)液压挖掘机行走速度——高速或低速可由驾驶员选
择。当选择开关在“0”位置时,挖掘机将低速、大扭矩行走;当选择开头在“1”位置时,挖掘机行走速度将根据液压行走回路工作压力而自动升高或下降。例如,挖掘机在平地上行走可选择高速;上坡行走时可选择低速。如果发动机速度控制盘设定在发动机中速(约1400r/min)以下,即使选择开关在“1”位置上,挖掘机仍会以低速行走。 7)挖掘机应尽可能在平地上行走,并避免上部转台自行放置或操纵其回转。 8)挖掘机在不良地面上行走时应避免岩石碰坏行走马达和履带架。泥砂、石子进入履带会场影响挖掘机正常行走及履带的使用寿命。 9)挖掘机在坡道上行走时应确保履带方向和地面条件,使挖掘机尽可能直线行驶;保持铲斗离地20-30cm,如果挖掘机打滑或不稳定,应立即放下铲斗;当发动机在
液压挖掘机开题报告 福州大学本科生毕业设计(论文)开题报告 机械设计制造及其自动姓名张玉辉学号 020800239 专业化题目小型液压挖掘机工作装置的设计 一、研究背景、概况及意义 这次的毕业设计是在我们学完了大学的全部基础课程、技术基础课程以及全部专业课程之后进行的。这是我们对所有课程的一次深入的综合性的总复习,也是一次理论结合实际的训练,因此,它在我们四年的大学生活中占有重要的地位。就我个人而言,这次毕业设计是熟悉和运用有关手册、图表等技术资料及编写技术文件等基本技能的一次实践机会,它能让我综合运用各科专业课程的基本理论,并结合生产实习和课程设计中学到的实践知识,独立地分析和解决问题,为未来从事的工作打下良好的基础。 挖掘机是用来开挖土嚷的施工机械。它是用铲斗上的斗齿切削土嚷并装入斗内,装满后提升铲斗并回转到卸土地点卸土,然后再使回转台回转、铲斗下降到挖掘面、进行下一次挖掘。挖掘机在工业与民用建筑、道路建设、农田水利、油田矿山、市政工程、机场港口等部门土石施工中占有重要位置。与发达国家相比,我国重矿机械行业还存在着不小的差距,主要表现为我们国家科技和新产品开发能力薄弱,缺乏市场竞争力,现代重要技术装备仍依靠进口,而从20世纪后期开始,国际上挖掘机的生产向大型化、微型化、多功能化、专用化和自动化的方向发展。因此开发新品种、多功能、高质量及高效率的挖掘机具有重要的现实意义。液压挖掘机的工作装置的性能是决定挖掘机能效高低的关键因素,它的设计好坏直接决定了挖掘机的性能水平。因此,研究小型液压挖掘机工作装置的设计具有十分重要的理论意义和现实意义。
1 二、研究主要内容 本次设计研究主要内容包含工作装置的整体方案拟定、对比、确定,对挖掘机工况分析,各主要零件的主要结构参数计算、结构分析和结构设计,并绘制出液压挖掘机工作装置的装配图及各主要零件的零件图,对动臂三维建模、强度分析、提出完善意见,查阅相关科技外文资料然后对其翻译,最后编写设计说明书。 三、研究步骤、方法及措施 1、查阅相关文献、搜集有关的资料。初步了解液压挖掘机的发展及应用。 2、通过对实物的参观及查阅相关书籍,对液压挖掘机的结构、工作原理、特点有进一步的了解。 3、对工况进行分析,根据有关书籍上提供的经验数据和有关公式,计算出主要件的结构参数。 4、根据计算结果和有关图册,进行工作装置的结构设计。 5、对动臂进行三维建模、利用相关软件进行强度分析、根据分析结果提出结构完善意见。 6、翻译相关科技外文资料。 7、编写设计说明书。 2 四、研究进度计划 设计是为2012年2月13日至2010年6月15日,期间约有15周。以下为大体计 划和进度。 毕业设计的主要内容和时间安排:
目录 目录 (1) 一、选题的目的和意义: (2) 二、国内外研究现状(文献综述) (2) 2.1挖掘机的机器人化 (2) 2.2遥控挖掘机的研究 (3) 2.3挖掘机节能技术的研究 (4) 2.4振动挖掘机理研究 (5) 三、市场发展状况(市场分析) (6) 3.1挖掘机的多功能化 (6) 3.2挖掘机的智能化 (7) 3.3挖掘机的实用型设计 (8) 四、选题研究的内容: (8) 五、选题研究的技术路线、研究方法和要解决的主要问题: (8) 六、研究工作进度: (9) 七、参考文献: (9) 1
一、选题的目的和意义: 挖掘机械是一种集土方挖掘、装载、平整、拆除、抢险等作业的工程机械,广泛应用于各类土石方工程施工、民用建筑、道路建设和市政工程场所。近年来伴随着我国经济的快速增长,大规模的基础设施建设对挖掘机提出了强劲的市场需求,我国挖掘机械的产销量每年均有15%~30%的爆炸式增长,2011年更是达到了70%,另一方面,挖掘机作为技术复杂的终端机械产品,其开发和制造涉及机械、液压传动、冶金、石油化工、电气等众多行业,已经形成了一个庞大的产业集群。因此,大力开展对液压挖掘机的研究和探索,对于提升国家整体工业水平和加速国民经济的发展具有重大的促进意义。 二、国内外研究现状(文献综述) 2.1挖掘机的机器人化 为延伸人类在复杂、恶劣、危险环境中的作业,世界各国对机器人化挖掘机的研发工作非常重视,国外在这方面研究比较早,较为典型的有: ①Carnegie Mellon大学的自主装载系统(Au—tonomous Loading System,ALS)t'Jt~ALS系统使用两个激光扫描测距仪,对车辆进行确认和准确定位、观测土壤表面情况、识别障碍物等。该系统还提出一种用于实时轨迹规划和执行复杂挖掘机器人运动的参数化控制方法。相同情况下,普通挖掘机熟练的操作手装满一卡车需要120S,而使用该系统也不超过150S,完成一个装载循环的时间小于1min,与熟练的操作手的操作速度基本相当。因此该系统能满足连续重复挖掘装载的工况要求。关于该系统的具体说明见于下面两篇论文:Peyret F,Jurasz J.The Compu~r Integrated Road Construction pmject[J].Automation in Construction,2000(9)Singh S,Cannon H_Multi-Resolution Planning for Earthmoving.Proceedings International Conference on Robotics and Automation[C].Leuven,Belgium,1998 ②国内机器人化挖掘机的研究国内在这方面研究相对较迟,浙江大学冯培恩教授从上世纪80年代开始率先着手研究挖掘机机电一体化技术,首先实现挖掘机器人作业过程的分级规划和局部自主控制圈。但是他们在任务 2
液压挖掘机设计与研究毕业论文 1 绪论 1.1 设计背景及目的 液压挖掘机是一种广泛用于建筑、公路、铁路、水利、采矿等建设工程的土方机械。液压挖掘机利用液压元件(液压泵、液压马达、液压缸等)带动各种构件动作,具有非常多得优点,而且只要加装不同的辅助设备即可用来抓物,钻孔,推土,清沟,破碎等作业,是工程机械的一个重要品种,能适应各种恶劣环境状况,大大提高了工作效率,改善了人的劳动强度。为整个社会的快速发展作出了巨大的贡献。 随着技术日渐成熟,国外一些知名的工程机械制造企业发展均比较迅速。例如,国外的有日本小松、德国力士乐、OK公司等,国有徐工集团、中联重科、三一集团、广西柳工集团、龙工集团、山河智能等企业。工程机械制造业的迅速发展不仅在专业方面做出了卓越贡献,同时也为整个社会的建筑风貌、自然救灾等方面作出了伟大的贡献。如5.12汶川大地震发生后,三一重工派出数十台挖掘机日夜兼程赶往灾区用于道路疏通,伤员抢救,以及灾后重建工作等。 我国是一个发展中国家,在辽阔的国土上正在进行大规模的经济建设,这就需要大量的土石方施工机械为其服务,而液压挖掘机是最重要的一类土石方施工机械。因此,可以肯定液压挖掘机的发展空间很大。可以预见,随着国家经济建设的不断发展,对挖掘机的需求量将逐年大幅度增长。今后几年我国液压挖掘机行业将会有一个很大的发展,其年产量将会以高于20%的速度增长。 从1967年到1977年间,国通过数年坚持不懈的努力,克服了重重困难,终于有少量几种规格的液压挖掘机产品获得初步成功,当时有上海建筑机械厂的WY100;矿山机器厂的W4-60;矿山机器厂的WY60;长江挖掘机厂的WY160和重型机械厂的WY250等,到现在,短短的40多年,挖掘机的产量和销量有了飞跃式的提高。尤其是在十一五期间,我国品牌的液压挖掘机发展迅速,在国的市场占有率也快速提高,如表1。
液压挖掘机主控制阀 液压挖掘机主控制阀 液压挖掘机主控制阀 液压挖掘机主控制阀 液压挖掘机主控制阀 主控制阀也称为主控阀或主阀,它的作用是按操作者的指令将泵排出的压力油提供到液压挖掘机主控制阀 各执行元件,使挖掘机完成各种动作。主控阀是个复杂的液压元件,现就几种典型的主控阀加以说明。 1.U28阀 U28阀是日本东芝公司生产的专用于20—3t的挖掘机上。其外形见图3—32 图3—32 U28阀外形图 该阀是一组多路阀,阀体分左,中,右三片,用螺栓紧密相联。左片是一组三联阀(上图中1,2,3号阀),中间片是油道,右片是一组四联阀(上图中4,5,6,7号阀)。 该阀具有如下功能: (1)单独动臂提升时双泵合流供油,提高动臂提升速度。(只在动臂提升时) (2)斗杆单独动作时双泵台流供油,加快斗杆动作速度。 (3)动臂优先,动臂与其他动作同时进行时,动臂的动作将优先保证。 (4)回转优先,回转与斗杆同时动作时,回转将优先保证。 (5)负流量控制,给主泵提供一个负流量信号,使阀杆在中位时,主泵排量变为最小。 (6)直线行走,当挖掘机前进或后退时可同时作其他动作,以保证特殊工况的需要。 (7)可配置电传感器,以满足电控的需要。 (A)液压系统符号
图中下面油口中,两个P1分别与两个主泵的出油口相接,是主进油口P2~口P3用油管连接,作为斗杆合流时的辅助进油。 b口与上面b口(左罗辑阀出口)用油管连接。 C口与动臂阀伺服油a1口相连,作为动臂合流的信号。 R口是主回油,接液压油散热器,然后回油箱。 a口与上面a口(右罗辑阀出口)用油管连接。 Py1和Py2与左,右行走操纵阀(脚踏阀)的出油连接,使行走增压。 上面油口fL和fR分别与两个主泵的负流量控制接口相接。 G口作为信号输出可作他用,如接压力传感器等。 当各阀杆在中立位置时(无操作时),左路P1通过三组阀后,推开罗辑阀2,经过负流量阀3进入回油道,从主回油口R回油箱。右路P1通过四组阀后,推开罗辑阀,经过负流量阀进入回油道,从主回油口R回油箱。 此时,两个负流量阀接口fL和fR分别有压力信号输出到主泵的调节器,使主泵排量减小。这是阀杆全部处于中立位置时油的流向。如果阀杆移动将有下面的情况。 1.回转阀(左片下面)移动时,假设a1口进伺服油,推动阀杆向右移位,P1的中路油被切断,而旁路油推开单向阀进入A1口,油从A1口流出进入回转马达。由回转马达流回的油经B1口从该阀的回油口流入回油道。此时,这一路油被引入执行元件回转马达而使挖掘机回转,上面的两组阀没有油通过,所以,负流量输出口fL没有压力输出,主油泵排量变大。 2.斗杆阀(左片中间一组)移动时,假设a2进伺服油,推动阀杆向右移位,P1的中路油被切断,而旁路油推开单向阀进入A2口,油从A2口流出进入斗杆油缸大腔。由斗杆油缸小腔流回的油经B2口从该阀的回油口流入回油道。此时,这一路油被斗杆阀切断,上面的一组阀没有油通过(指到罗辑阀处没有油,经节流阀6来的并联油路的油在单向阀4处被断开)。所以,负流量输出口fL没有压力输出,主油泵排量变大。 当该阀杆向右移时,阀杆右端切断了控制油到回油道的通路(虚线,从a口来的油,即从右片阀的罗辑阀出口a经外接管道进入下面a口)。使右片阀的罗辑阀出口a被堵截,右面主泵压力油从罗辑阀心
目录 摘要 .....................................................................IV Abstract....................................................................V 前言 .................................................................... VI 第一章绪论 ........................................... 错误!未定义书签。 1.1 液压挖掘机在现代化建设中的作用.................. 错误!未定义书签。 1.2 液压挖掘机的工作特点和基本类型 (1) 1.2.1 液压挖掘机的主要优缺点 (1) 1.2.2 液压挖掘机的基本类型及主要特点 ............ 错误!未定义书签。 1.3 国内外液压挖掘机研究现状及发展趋势 (4) 1.3.1 研究现状 (4) 1.3.2 发展趋势 .................................. 错误!未定义书签。 1.4 课题设计的目的和意义 (5) 1.5 本设计所要完成的主要任务 (5) 第二章总体方案设计 .................................... 错误!未定义书签。 2.1 履带式液压挖掘机的组成.......................... 错误!未定义书签。 2.2 设计依据 (7) 2.2.1 履带式行走装置的主要特点 (7) 2.2.2 设计参数 .................................. 错误!未定义书签。 2.3 总体设计原则.................................... 错误!未定义书签。 2.4 动力装置的比较与选型 (8) 2.5 工作装置的比较与选择 (9) 2.5.1 反铲工作装置 .............................. 错误!未定义书签。 2.5.2 正铲工作装置 .............................. 错误!未定义书签。 2.6 回转机构的选择.................................. 错误!未定义书签。 2.7 传动方式的比较与选择............................ 错误!未定义书签。 2.7.1 机械传动 .................................. 错误!未定义书签。 2.7.2 液力机械传动 .............................. 错误!未定义书签。 2.7.3 电力传动 .................................. 错误!未定义书签。
毕业设计(开题报告) 学院 专业 班级学号 学生 指导教师 题目基于SOLIDWORKS的液压挖掘机 工作装置设计 任务规定 进行日期自2013 年1月14日起,至2013 年6月25 日止 1 绪论 1.1 开题的目的和意义: 液压挖掘机是一种多功能机械,目前被广泛应用于水利工程,交通运输,电力工程和矿山采掘等机械施工中,它在减轻繁重的体力劳
动,保证工程质量。加快建设速度以及提高劳动生产率方面起着十分重要的作用。由于液压挖掘机具有多品种,多功能,高质量及高效率等特点,因此受到了广大施工作业单位的青睐。液压挖掘机的生产制造业也日益蓬勃发展。 挖掘机液压传动紧密地联系在一起,其发展主要以液压技术的应用为基础。其结构主要是由发动机、液压系统、工作装置、行走装置和电气控制等部分组成(如图1.1所示),由于挖掘机的工作条件恶劣,要求实现的动作很复杂,于是它对液压系统的设计提出了很高的要求,其液压系统也是工程机械液压系统中最为复杂的。因此,对挖掘机液压系统的分析设计已经成为推动挖掘机发展中的重要一环。 所以,液压挖掘机作为工程机械的一个重要品种,对于减轻工人繁重的体力劳动,提高施工机械化水平,加快施工进度,促进各项建设事业的发展,都起着很大的作用,因此,大力发展液压挖掘机,对于提高劳动生产率和加速国民经济的发展具有重要意义。
图1.1 液压挖掘机整体系统图 通过本次毕业设计,我能将所学的基础理论应用于实际,从而使知识 系统化、综合化。并结合本次毕业设计培养独立获取新知识的能力,提高其运用SOLIDWORKS完成总体装配结构图设计,并将三维图转换为二维CAD图纸的能力,学会一些机械绘图基本要求。使自己树立起具有符合国情和生产实际的正确的设计思想和观点;树立起严谨、负责、实事求是、刻苦钻研、勇于探索并 与建筑、高等级公路、桥梁,水坝和矿业的发展息息相关,使用也越来越广。 1.2液压挖掘机的类型 挖掘机械的类型与构造型式繁多,可按照挖掘工作原理与过程、用途、构造特征等进行划分。 (1)根据铲斗类型分为正铲和反铲。 (2)按照用途:单斗挖掘机分为 建筑型、采矿型和剥离型等。 建筑型挖掘机一般可装置各种不同的工作装置 进行多种作业 故又称通用式。 (3)按照动力装置 挖掘机有电驱动、内燃机驱动和复合驱动等 以一台发动机带支挖掘机全部机构者为单机驱动式 以若干发动机分别带动各个主要机构者为多机驱动式。 (4)按照传动方式 挖掘机分为机械传动式、液压传动式和混合
液压挖掘机主控制阀 发表于:2008年3月18日 16时55分34秒阅读(4)评论(0)本文链接: https://www.doczj.com/doc/9e18658667.html,/479140927/blog/1205830534 液压挖掘机主控制阀 液压挖掘机主控制阀主控制阀也称为主控阀或主阀,它的作用是按操作者的指令将泵排出的压力油提供到各执行元件,使挖掘机完成各种动作。主控阀是个复杂的液压元件,现就几种典型的主控阀加以说明。 1.U28阀 U28阀是日本东芝公司生产的专用于20—3t的挖掘机上。其外形见图3—32 图3—32 U28阀外形图该阀是一组多路阀,阀体分左,中,右三片,用螺栓紧密相联。左片是一组三联阀(上图中1,2,3号阀),中间片是油道,右片是一组四联阀(上图中4,5,6,7号阀)。 该阀具有如下功能: (1)单独动臂提升时双泵合流供油,提高动臂提升速度。 (只在动臂提升时) (2)斗杆单独动作时双泵台流供油,加快斗杆动作速度。 (3)动臂优先,动臂与其他动作同时进行时,动臂的动作将优先保证。 (4)回转优先,回转与斗杆同时动作时,回转将优先保证。 (5)负流量控制,给主泵提供一个负流量信号,使阀杆在中位时,主泵排量变为最小。 (6)直线行走,当挖掘机前进或后退时可同时作其他动作,以保证特殊工况的需要。 (7)可配置电传感器,以满足电控的需要。 (A)液压系统符号
图中下面油口中,两个P1分别与两个主泵的出油口相接,是主进油口P2~口P3用油管连接,作为斗杆合流时的辅助进油。 b口与上面b口(左罗辑阀出口)用油管连接。 C口与动臂阀伺服油a1口相连,作为动臂合流的信号。 R口是主回油,接液压油散热器,然后回油箱。 a口与上面a口(右罗辑阀出口)用油管连接。 Py1和Py2与左,右行走操纵阀(脚踏阀)的出油连接,使行走增压。 上面油口fL和fR分别与两个主泵的负流量控制接口相接。 G口作为信号输出可作他用,如接压力传感器等。 当各阀杆在中立位置时(无操作时),左路P1通过三组阀后,推开罗辑阀2,经过负流量阀3进入回油道,从主回油口R回油箱。右路P1通过四组阀后,推开罗辑阀,经过负流量阀进入回油道,从主回油口R回油箱。 此时,两个负流量阀接口fL和fR分别有压力信号输出到主泵的调节器,使主泵排量减小。这是阀杆全部处于中立位置时油的流向。如果阀杆移动将有下面的情况。 1.回转阀(左片下面)移动时,假设a1口进伺服油,推动阀杆向右移位,P1的中路油被切断,而旁路油推开单向阀进入A1口,油从A1口流出进入回转马达。由回转马达流回的油经B1口从该阀的回油口流入回油道。此时,这一路油被引入执行元件回转马达而使挖掘机回转,上面的两组阀没有油通过,所以,负流量输出口fL没有压力输出,主油泵排量变大。 2.斗杆阀(左片中间一组)移动时,假设a2进伺服油,推动阀杆向右移位,P1的中路油被切断,而旁路油推开单向阀进入A2口,油从A2口流出进入斗杆油缸大腔。由斗杆油缸小腔流回的油经B2口从该阀的回油口流入回油道。此时,这一路油被斗杆阀切断,上面的一组阀没有油通过(指到罗辑阀处没有油,经节流阀6来的并联油路的油在单向阀4处被断开)。所以,负流量输出口fL没有压力输出,主油泵排量变大。 当该阀杆向右移时,阀杆右端切断了控制油到回油道的通路(虚线,从a口来的油,即从右片阀的罗辑阀出口a经外接管道进入下面a口)。使右片阀的罗辑阀出口a被堵截,右面主泵压力油从罗辑阀心
设计(论文) 题目 履带式挖掘机行走装置的设计 设计(论文)类型(划“√”)工程设计应用研究开发研究基础研究其它 √ 一、本课题的发展现状 履带式挖掘机属于工程机械,而工程机械是国民经济建设及国防工程施工中使用的重要技术装备,在国民经济建设中,尤其是城市建设、民用建筑、水利建设、道路构筑、机场修建、矿山开采、码头建造、农田改良中,工程机械起着越来越重要的作用。我国的工程机械行业目前进入了一个高速发展阶段,推、挖、装、起重、铲土运输、筑路、农用机械等各种品种齐全并形成了系列化,各种工程机械虽然品种很多但基本上可划分为动力装置、行走装置和工作装置。行走装置是全机的基础。 二、本课题的国内外发展趋势 由于传统履带式挖掘机具有很多的不足之处(如跨越障碍物的能力弱,摩擦阻力损失大,性价比高,稳定性差等),因此未来挖掘机的结构逐渐向着实用化的方向发展,从而呈现出新的发展趋势。 1)挖掘机的各个零部件趋于系列化,利于机械的维修。 2)新型的液压式挖掘机的稳定性得到进一步的改善。 三、本课题的主要研究内容(提纲) 1、履带式挖掘机的发展趋势 2、托链轮体及轮架的制造过程 3、传动方案的总体设计 4、履带张紧装置的设计 5、履带式行走装置的总体方案设计 6、驱动轮设计 7、导向轮设计 8、支重轮的设计
四、文献综述(国内外研究情况及其发展) 从国内情况来看,我国挖掘机行业整体发展水平较国外缓慢,在挖掘机液压系统方面的理论还比较薄弱。国内大部分挖掘机企业在挖掘机液压系统传统技术方面的研究具有一定基础,但由于采用传统液压系统的挖掘机产品在性能、质量、作业效率、可靠性等方面均较差,因此采用传统液压系统的挖掘机在国内市场上基本失去了竞争力,取而代之的是采用各种高新技术的国外挖掘机产品。先进的挖掘机液压系统都被国际上一流的生产企业垄断,国内企业在该领域的研究几乎是空白,这样国内的挖掘机生产厂家就无法独立制造出性能优异的挖掘机,绝大部分的市场份额都被国外各种品牌的挖掘机所占据。以20t级的中型液压挖掘机为例,国产20t级挖掘机大多数是欧洲80年代初的技术”,同90年代初以来在国内形成批量的日本小松、日立、神钢以及韩国大宇、现代等机型相比,其主要差距柴油机功率偏低,液压系统流量偏小,液压系统特性差,导致平台回转速度低,行走速度低,各种性能参数均偏小,整机性能和作业效率较国外偏低。研究挖掘机的节能控制处于非常关键的地位,决定了国内挖掘机今后的竞争力。尽管国外挖掘机节能控制已经发展到了非常成熟的地步,但并不意味着我们没有一点机会,混合动力汽车的发展为我们挖掘机等工程机械的的节能提供了很好的借鉴,说明挖掘机节能还有很大的潜力可挖,乐观估计的话应该还有50%的节能潜力。 中国工程机械行业从形成、发展到壮大,成为世界工程机械大国,经历了短短的40余年,特别是改革开放30年来,发展尤为迅速,以液压挖掘机为例,1993年我国液压挖掘机总销量为2349台,15年后的2008年我国液压挖掘机的总销量高达83000台,15年增长35倍。而2010年我国液压挖掘机的总销量已超过一万台,挖掘机行业在中国机械行业中占据了不可替代的地位。
轮式液压挖掘机操作规程 (一)启动前检查 第一条清理设备上的泥土杂物;检查设备外观是否完好,有无变形、裂纹等异常损坏。 第二条检查转向连杆机构有无异常。 第三条检查轮胎有无损伤,气压是否正常,螺栓有无松动和丢失,轮辋、轮胎压圈及压圈锁是否正常。 第四条检查车架有无变形、裂纹现象,各驱动桥有无开焊或裂纹。 第五条检查制动系统和管路有无异常。 第六条检查各部铰接点润滑是否良好。 第七条检查回转齿圈啮合情况和润滑情况是否良好。 第八条检查各工作油缸、动臂、斗杆、铲斗、斗齿、销轴、螺栓等有无变形、裂纹等异常和磨损过限。 第九条检查设备各部有无渗漏现象,各部联结螺栓有无松动、断裂、丢失;附件是否齐全。 第十条检查燃油位、发动机油位、液压油位、变速箱油和差速器油位、蓄电池电解液液位等。 第十一条检查空气滤清器,必要时清理空气滤清器外滤芯。 第十二条检查清理发动机周围和散热器上的杂物和尘土,检查发动机有无渗漏、联结螺栓有无松动丢失;检查进气管、排气管接口处密封状况,是否有泄漏。 第十三条检查发动机风扇皮带、发电机皮带张紧度以及皮带有无损坏。 第十四条检查油管、电气线路有无异常磨损、老化、破裂等现象。 第十五条检查并使主泵吸油管路上的球阀在接通位置。 第十六条检查照明、喇叭、雨刷器、倒车镜、灭火器、通讯设备是否齐全有效。 第十七条检查仪表、指示器和指示灯是否齐全完好。
(二)启动 第十八条检查一切正常并确认周围无障碍物及人员后,将各操纵杆放到空位,停车制动在锁止位置。 第十九条将驾驶室左控制箱向上翻起(或操纵手动控制阀)切断先导控制回路。 第二十条将油门放在中间3/4位置上(即小油门)。 第二十一条将钥匙旋转到接通(“ON”)位置,鸣笛发出启动信号。将钥匙旋转到启动(“START”)位置,启动发动机。如果发动机启动困难,钥匙在启动位置的时间一次不准超过20秒,两次启动间隔时间不准少于2分钟,如果连续 3次不能启动,应检查发动机。 第二十二条当发动机启动后,立即松开钥匙。 第二十三条发动机启动后,观察各仪表指示是否正常,机油压力如果在6秒后仍不正常,应立即熄火检查。 第二十四条发动机启动后应怠速运转3~5分钟,检查发动机等有无异响、异味、异常振动和渗漏,观察发动机排气颜色是否正常。 第二十五条逐渐增大发动机油门,使转速至中速,以使发动机升温。 第二十六条在冬季停放时间较长的车应先进行预热,方可启动。 第二十七条如果使用启动液辅助启动,必须遵守有关启动液使用规定。(三)运行 第二十八条冷车启动后不准立即行驶和作业,发动机水温低于60摄氏度前不准满负荷工作。 第二十九条起步前检查空气压力表,表针指示在绿色区域内方准起步。 第三十条行走前应将平台锁紧销插入销孔,作业前应拨出。 第三十一条起步前检查车辆前后左右是否有人和障碍物,鸣笛示意。 第三十二条起步前必须先将铲斗提起离开地面0.5米左右,解除停车制动。 第三十三条起步后,检查制动系统和转向系统的可靠性。 第三十四条不准发动机熄火或空档滑行。 第三十五条不准用高速起步,起步时不准高于二档,起步后按道路情况升
一、主液压回路系统的构成 日立挖掘机主液压回路系统是由主液压系统和先导回路系统构成。主液压回路将泵的液压油供给各操作机能的促动器。 二、先导回路液压操作系统的组成 液压系统是由发动机、主泵、先导泵、控制阀各1台和四个液压缸、1台旋转马达及2台行走马达组合而成、泵通过输入轴由发动机所驱动。主泵的液压油通过控制阀流到各促动器。先导泵的液压油流入先导回路内。 三、主回路 1、主液压回路 主液压回路系由吸引回路、输出回路、回油路及牌友回路所构成。液压系统由主泵、控制阀、行走马达各一台及四个液压缸。 主泵是斜轴式排量可变型轴向活塞泵,是由发动机驱动的(发动机转速比为1.0) 2、吸引回路和输出回路 泵通过吸引滤油器吸引液压油箱的油,油从泵流入控制阀,然后由油箱口放出,主泵放出的油通过控制阀流至各促动器。 控制阀控制各种液压机能,从各促动器流出的回油通过控制阀和液压油冷却器流回液压油箱。 3、回油路 每个促动器放出的油全部通过控制阀流回液压油箱内。回油路内有旁道单向阀,其设定压力分别为9.8×10^4pa及4×9.8×10^4pa。通常回油通过液压油冷却器及左侧控制阀流回液压油箱, 油温低时,粘度变高,通过油冷却器时的阻力也随着增大。 油压超过9.8×10^4pa时,回油直接流回液压油箱,可在短时间内把油温提高到适当的高度。 油冷却器被阻塞时,回油通过旁道单向阀直接流回液压油箱。 旁道单向阀被阻塞时设在冷却器和液压油箱之间,其设定压力为4×9.8×10^4pa。 液压箱内设有直流式滤油器,从左右两侧的控制阀流出的油合流后经直流式滤油器过滤,直流式滤油器内有旁道安全阀。当滤芯阻塞使差压达9.8×10^4pa时,旁道安全阀就打开,油直接流回液压油箱。 4、排油回路 马达及刹车阀等内部漏的油以及润滑油回路内的油,全部都积蓄起来,经过排油回路流回操作油箱。 5、行走马达排油回路 左右两行走马达漏的油由各个马达壳的排油口排出,合流后通过中心接头,经过直流式滤油器流回液压油箱。 6、旋转马达排油回路 旋转马达漏的油排出后,与行走回路排出的油一起通过直流式滤油器流回液压油箱。 7、输出压控制 控制阀内的卸载安全阀控制泵的输出压力保持一定。全部操作均在330×9.8×10^4Pa设定压力操作。 在挖掘操作时,设定压力变为370×9.8×10^4Pa。 狼涌截止安全阀把高压油释放到液压油箱内,以免油压系统及发动机承受过负荷。 8、先导回路 先导回路是由吸引、出油回路构成的。先导系统有先导泵、换冲阀、保险阀、2个高速电
目录 1 绪论 (1) 1.1 选题意义 (1) 1.2 国内外研究现状 (2) 1.3 研究内容及方法 (3) 2 行走装置设计总体基本方案 (4) 2.1行走装置设计原则 (4) 2.2轮式液压挖掘机行走装置的结构形式 (4) 2.3液压系统的设计 (6) 2.4轮式行走装置的传动设计(液压机械传动) (10) 2.5轮式行走装置的构造 (11) 2.5.1悬挂装置选择 (11) 2.5.2 转向机构 (12) 2.5.3 转向方式 (13) 3 整机传动系的设计 (15) 3.1选择液压马达类型、行走速度及传动比 (15) 3.2实际速度及牵引力 (16) 3.3挖掘机行走装置参数 (16) 3.4 变速箱设计 (17) 3.4.1低速档齿轮设计 (17) 1 材料选择 ..................................... 错误!未定义书签。 2 齿数确定 ..................................... 错误!未定义书签。 3 按齿面接触强度设计 ........................... 错误!未定义书签。 4 按齿根弯曲强度设计 ........................... 错误!未定义书签。 5 齿轮几何尺寸计算 ............................. 错误!未定义书签。 3.4.2高速档齿轮设计 (18) 3.4.3齿轮变位 (19) 3.5 轮边减速器 (21) 3.5.1传动方案的选择 (21) 3.5.2配齿选择 (21) 3.5.3行星传动系设计 (22)
毕业设计(论文)开题报告题目:多功能挖掘机工作装置设计
图1 整体式直动臂图2 整体式弯动臂
注:1. 正文:宋体小四号字,行距22磅。 2. 开题报告由各系集中归档保存。 参考文献 [1] 任友良.液压挖掘机工作装置结构性能分析[D].杭州:浙江大学,2010:9-22 [2] 康海洋.液压挖掘机动臂结构动态分析[D].长沙:长沙理工大学,2007:6-18 [3] 王建军,冯光金,占必红等.小型挖掘机工作装置三维建模及有限元分析[J].中国工程 机械学报,2011,(9) [4] 牛多青,尹成龙,汪振乾等.基于SolidWorks的挖掘机工作装置虚拟设计[J].机械制造, 2007,(45) [5] 周勇,宋春华.国内外液压挖掘机的发展动向[J].矿山机械,2008,(36) [6] 朱建新,邹湘伏,黄志雄.谈国产液压挖掘机未来的发展趋势[J].凿岩机械气动工具, 2003,(3) [7] 何清华,张大庆,郝鹏等.液压挖掘机工作装置仿真研究[J].系统仿真学报,2006,(18) [8] 刘韬,胡军科,谢平.液压挖掘机工作装置结构的优化设计[J].建设机械技术与管理, 2010 [9] 张林艳,邓子龙,张红亮等.挖掘机工作装置虚拟样机的建立与动力学仿真[J].辽宁石 油化工大学学报,2008,(28) [10] 张卫国. 液压挖掘机工作装置动力学仿真分析及研究[D].山西:太原理工大学,2010 [11] 郑东京.挖掘机工作装置的有限元分析及其仿真[D].陕西:西北农林科技大学,2011 [12] 陈玉峰.液压挖掘机工作装置运动与动力综合优化研究[D].重庆:重庆大学,2005 [13] 杜文靖,崔国华,刘小光.液压挖掘机工作装置整体集成有限元分析[J].农业机械学报, 2007(38) [14]GU Jun and SEW ARD Derek.Digital Servo Control of a Robotic Excavator[J].CHINESE