基于Matlab的多约束自动平行泊车轨迹规划
李红1,郭孔辉1,2,宋晓琳1,李飞龙1
【摘要】摘要:分析泊车轨迹曲线特点,在已有轨迹函数基础上提出新的轨迹函数,通过对实际泊车轨迹的拟合证明该函数的可用性。分析泊车环境中存在的可能碰撞点,建立相应的避撞约束函数。以泊车环境障碍约束、车辆自身参数约束、泊车初始点方位约束、泊车终点位置约束为轨迹函数的约束函数,以泊车终点车辆与车位夹角最小为目标函数建立单目标多约束轨迹方程。分别对一般泊车环境和狭小空间泊车环境进行泊车轨迹规划,利用Matlab软件非线性约束优化函数求得轨迹函数参数。仿真结果表明:对于一般泊车环境,该方法能满足泊车轨迹曲率连续性,使车辆无碰撞进入车位,并使车辆与车位平行;对于狭小空间泊车环境,虽未能使车辆与车位平行,但实现了车辆无碰撞地泊车入位并保证轨迹曲率的连续性。由此可知该方法可实现车辆无碰撞地泊车入位,并满足轨迹曲率连续性要求,有效地解决了泊车过程中停车转向问题。【期刊名称】中南大学学报(自然科学版)
【年(卷),期】2013(044)001
【总页数】7
【关键词】轨迹规划;自动泊车;避撞;多约束;优化
【文献来源】https://https://www.doczj.com/doc/9e1383533.html,/academic-journal-cn_journal-central-south-university-science-technology_thesis/0201248333038.html
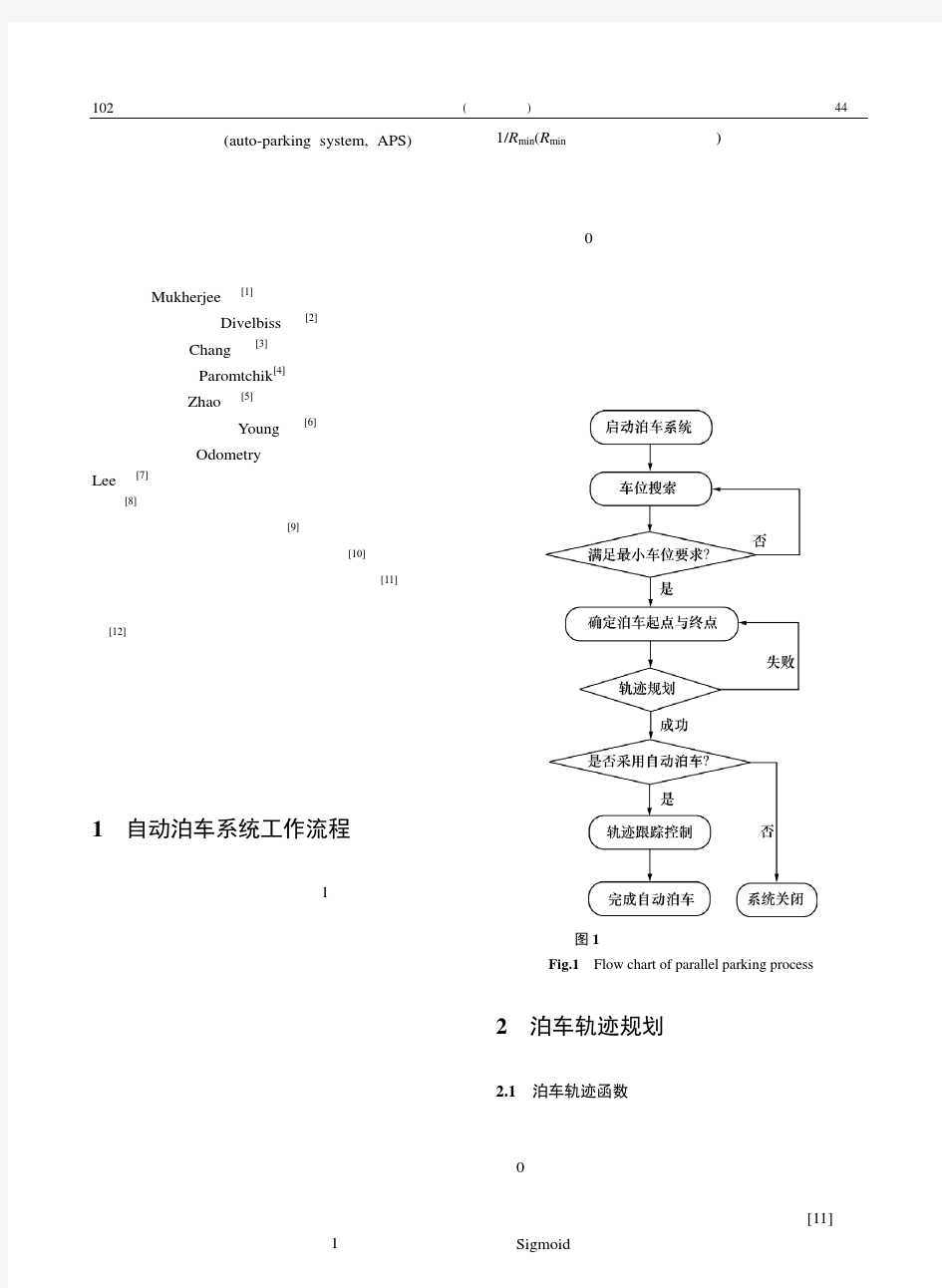
自动泊车技术(auto-parking system,APS)是智能汽车技术的重要组成部分,其目的是辅助或者替代驾驶员完成车辆的安全泊位。随着汽车行业的发展,乘用车辆的普及,城市泊车空间越来越小,增加了驾驶员泊车的困难,因此,自
自动泊车系统路径规划与跟踪控制研究作为一种方便、快捷的交通工具,汽车已成为人们生活和工作的重要组成部分。随着汽车数量的逐年增加,有限的城市空间显得日趋拥挤,车辆平均分配到的停放空间也日趋缩小,车辆泊车入位困难问题在人们生活中逐渐显现。 人们对车辆使用轻便性及安全性要求促使越来越多汽车生产商、科研机构及高校对泊车系统进行研究。目前,国外已有部分汽车生产商推出自己的自动泊车系统,但仅装配于高端车型,我国暂时还未具有自主知识产权的汽车自动泊车系统。 因此,本文以低端车型为研究平台,针对自动平行泊车系统的核心技术——泊车控制策略进行探索,目的为提高泊车操作轻便性和泊车过程安全性。本文采用泊车路径规划和泊车路径跟踪控制方法进行泊车系统控制器控制策略设计,全部工作内容如下:(1)车位检测方法研究及验证。 了解超声波雷达测距原理,采用超声波雷达与车轮里程计进行车位检测。通过测位雷达测距变化特点分析车位起始点和终止点,并结合轮速信号得到车位的长度,通过测位雷达测距获得车位宽度,并通过车位检测实验验证了方法的可行性。 (2)泊车路径规划。提出基于B样条理论的泊车路径规划思想,针对车位空间大小采用单步泊车或两步泊车路径规划方法。 分别对两种泊车方式路径约束进行分析,建立泊车路径优化函数,最终设计出满足泊车过程多个非线性约束的易于车辆跟踪的泊车路径。(3)路径跟踪控制方法研究。 为降低泊车系统对驾驶员车速控制要求,提出非时间参考的泊车路径跟踪控
制策略。针对路径跟踪过程中,因车辆转向系统转角转速约束、车辆最小转弯半径约束、车辆行驶速度等因素导致的车辆偏离目标路径现象,提出结合过定点控制的路径跟踪控制方法,设计出非时间参考的车辆过定点控制律,并通过Carsim 与Simulink联合仿真对路径跟踪策略进行验证。 (4)车辆定位方法及验证。车辆定位包括车辆初始位姿计算和车辆运动位姿计算。 为提高道路两侧车位利用率,并使泊车系统更具人性化,泊车系统根据车位信息提供驾驶员多个可选择的车辆停放标准。根据驾驶员发出的车辆停放基准指令,泊车系统建立泊车空间坐标系并计算车辆初始位姿。 采用基于车轮里程计的车辆定位方法计算泊车过程中车辆在泊车空间中的位姿,并通过实验对定位方法可行性进行验证。(5)泊车系统控制策略功能验证。 组建泊车系统感知单元、转向执行机构、人-机交互系统、数据采集与通信设备等。在Simulink中建立泊车系统控制器模型,使用StateFlow模块实现控制器各控制状态之间的切换,基于快速控制原型技术对泊车系统泊车功能进行泊车实验验证。 本文主要创新点可归纳如下:(1)基于B样条理论进行路径规划,满足了泊车路径多阶平滑、变化灵活、泊车安全性等要求,根据车位大小实现了单步泊车或两步泊车路径规划。(2)提出了非时间参考的路径跟踪控制方法,避免了车速对路径跟踪控制的影响,降低了驾驶员速度控制难度。 (3)提出了过定点跟踪控制的车辆位姿调整方法,通过车辆位姿调整,可提高泊车成功率,并实现车辆规范停放。(4)基于Simulink/StateFlow建立了泊车控制系统控制器模型,对泊车的路径规划和跟踪控制进行了仿真,基于一种新的
清扫机器人路径规划方法研究 摘要:近年来,智能清扫机器人系统的研究和开发已具备了坚实的基础和良好的 发展前景。现在的智能清扫机器人通过软硬件的合理设计,使其能够自动避开障 碍物,实现一般家居环境及特定户外环境的自主清扫工作。本文简单介绍了清扫 机器人基于无环境模型的路径规划的具体办法。 关键词:清扫机器人、无环境模型、路径规划 一、绪论 机器人的研究在日本和欧美的一些发达国家的研究相对比较深入,同时也取 得了很多显著的成果。国内关于清扫机器人的研究也取得了极大的进展。我国继 清华大学于1994年通过智能清扫机器人鉴定之后,陆续有中国科学院沈阳自动 化所研制了全方位移动式机器人视觉导航系统;2001年香港城市大学完整地研究了地面清扫机器人的导航、控制及整个硬件系统;2009年哈尔滨工业大学与香港中文大学合作,联合研制开发出一种全方位地面清扫机器人。总而言之,清洁机 器人的研究正在快速发展,并且也越来越深入,但是还有需要完善和改进的地方,例如清洁机器人的避障问题,路径规划等等,所以针对清扫机器人进行一系列的 技术研究探讨是相当有意义的。 二、基于无环境模型的路径规划 清洁机器人的路径规划是根据机器人所感知到的工作环境信息,按照某种优 化指标,在起始点和目标点规划出一条与环境障碍无碰撞的路径,并且实现所需 清扫区域的合理完全路径覆盖,同时实现封闭区域内机器人行走路径对工作区域 的最大覆盖率和最小重复率。目前全区域覆盖路径规划有两种,一种是无环境模 型的路径规划,另一种是基于环境模型的路径规划。本文主要着重介绍无环境规 划的整个过程。 无环境模型的路径规划不需要建立环境模型,有随机遍历路径规划和全区域 覆盖路径规划两种模式。机器人在清扫的时候比较自由,一般都是采用递进的方式,清扫完这个直线再偏移一段距离,掉头清扫另外一条直线,以达到全区域清扫,本文也着重介绍无环境模型的路径规划。基于无环境模型的依据边界的路径 规划方法 三、基于无环境模型的路径规划具体方法 (一)建立房间边界 首次在未知空间内行驶时,小车所能记录的信息为两种,一种是小车两个驱 动轮行驶路程L1与L2,另一种是各传感器被触发的状态。下图是小车在某转角 处的路线图,根据以上特点及为后续数据处理提供依据,我们可以建立如下规则。轨迹计算原理,数据处理规则。 (1)小车转角计算 若小车沿某一物体边缘转过θ角,则可以通过如下公式求算θ角 规定为行走时小车的拐角,规定连续经过多个拐角时,为各自拐角的和。 (2)小车行程的计算 小车行程的计算可以按照两驱动轮轨迹线的中心线即可代表小车行驶时的轨迹,小车行 车记录为: (3)机器人沿着边界行驶 机器人选择任意一方向寻找边界,找到边界后,小车沿边界方向前进直到遇到拐角。行 进过程中根据传感器状态确定内外侧路径,确定完内外侧后,小车前进过程中所记录的拐角
多目标规划 multiple objectives programming 数学规划的一个分支。研究多于一个目标函数在给定区域上的最优化。又称多目标最优化。通常记为VMP。在很多实际问题中,例如经济、管理、军事、科学和工程设计等领域,衡量一个方案的好坏往往难以用一个指标来判断,而需要用多个目标来比较,而这些目标有时不甚协调,甚至是矛盾的。因此有许多学者致力于这方面的研究。1896年法国经济学家V.帕雷托最早研究不可比较目标的优化问题,之后,J.冯·诺伊曼、H.W.库恩、A.W.塔克尔、A.M.日夫里翁等数学家做了深入的探讨,但是尚未有一个完全令人满意的定义。求解多目标规划的方法大体上有以下几种:一种是化多为少的方法,即把多目标化为比较容易求解的单目标或双目标,如主要目标法、线性加权法、理想点法等;另一种叫分层序列法,即把目标按其重要性给出一个序列,每次都在前一目标最优解集内求下一个目标最优解,直到求出共同的最优解。对多目标的线性规划除以上方法外还可以适当修正单纯形法来求解;还有一种称为层次分析法,是由美国运筹学家沙旦于70年代提出的,这是一种定性与定量相结合的多目标决策与分析方法,对于目标结构复杂且缺乏必要的数据的情况更为实用。 1947年,J.冯·诺伊曼和O.莫根施特恩从对策论的角度提出了有多个决策者在彼此有矛盾的情况下的多目标问题。1951年,T.C.库普曼斯从生产和分配的活动中提出多目标最优化问题,引入有效解的概念,并得到一些基本结果。同年,H.W.库恩和A.W.塔克尔从研究数学规划的角度提出向量极值问题,引入库恩-塔克尔有效解概念,并研究了它的必要和充分条件。1963年,L.A.扎德从控制论方面提出多指标最优化问题,也给出了一些基本结果。1968年,A.M.日夫里翁为了排除变态的有效解,引进了真有效解概念,并得到了有关的结果。自70年代以来,多目标规划的研究越来越受到人们的重视。至今关于多目标最优解尚无一种完全令人满意的定义,所以在理论上多目标规划仍处于发展阶段。 化多为少 即把多目标规划问题归为单目标的数学规划(线性规划或非线性规划)问题进行求解,即所谓标量化的方法,这是基本的算法之一。 ①线性加权和法对于多目标规划问题(VMP),先选取向量 要求λi>0(i=1,2,…,m) 作各目标线性加权和
自动泊车系统路径规划与跟踪算法研究自动泊车系统作为车辆智能化时代代表系统之一,成为各大汽车公司展示自身在车辆智能化方面实力的主要途径;在泊车位日益稀缺、泊车空间日益缩小的今天,自动泊车系统逐渐成为车辆的“标配件”,成为消费者购车的主要参考项之一。本文主要针对自动泊车系统的核心问题——系统控制算法进行深入探究,分泊车路径规划与路径跟踪两方面进行讨论分析。 在路径规划方面,基于车辆低速运动特征提出了一种特殊的轨迹线——双匀速轨迹;基于泊车工况中驾驶员的操纵行为进一步提出了主要应用于泊车路径规划的轨迹线——车辆DCD轨迹(双匀速-圆弧-双匀速轨迹);对DCD轨迹相关参数进行补充和说明,总结了利用DCD轨迹规划平行泊车和垂直泊车路径的方法,利用逆向路径规划的方法分析了在一次性泊车情况下的最小可行泊车空间和泊车可行域问题。在路径跟踪方面,本文首先研究了双速变化对于双匀速轨迹的影响规律,发现了在车辆双速同时成比例变化时,所形成的双匀速轨迹具有固定的形态;将双匀速轨迹特性进一步延伸至DCD轨迹中,得到了DCD轨迹所具有的特殊性质;利用DCD轨迹的特殊性质,设计了一种基于实时车速和车辆所处阶段的方向盘转角控制算法,该算法利用DCD轨迹的特性找到了车速与方向盘转速间的变化关系,大幅降低车速波动对于路径跟踪精度的影响;由于基于DCD轨迹特性的泊车控制算法为开环算法,无法处理随机干扰对于路径跟踪效果的影响,为了提高算法的稳定性,本文基于非时间参考的路径跟踪控制理论推导出车辆跟随直线目标轨迹的方向盘转角控制率,在原开环算法中加入中部利用闭环算法调整车辆位姿的环节,利用Carsim中的车辆模型验证了经过改进的“半闭环”算法在理论上的可行性。
多目标线性规划的若干解法及MATLAB 实现 一.多目标线性规划模型 多目标线性规划有着两个和两个以上的目标函数,且目标函数和约束条件全是线性函 数,其数学模型表示为: 11111221221122221122max n n n n r r r rn n z c x c x c x z c x c x c x z c x c x c x =+++??=+++?? ??=+++? (1) 约束条件为: 1111221121122222112212,,,0 n n n n m m mn n m n a x a x a x b a x a x a x b a x a x a x b x x x +++≤??+++≤?? ??+++≤?≥?? (2) 若(1)式中只有一个1122i i i in n z c x c x c x =+++ ,则该问题为典型的单目标线性规划。我们记:()ij m n A a ?=,()ij r n C c ?=,12(,,,)T m b b b b = ,12(,,,)T n x x x x = , 12(,,,)T r Z Z Z Z = . 则上述多目标线性规划可用矩阵形式表示为: max Z Cx = 约束条件:0 Ax b x ≤?? ≥? (3) 二.MATLAB 优化工具箱常用函数[3] 在MA TLAB 软件中,有几个专门求解最优化问题的函数,如求线性规划问题的linprog 、求有约束非线性函数的fmincon 、求最大最小化问题的fminimax 、求多目标达到问题的fgoalattain 等,它们的调用形式分别为: ①.[x,fval]=linprog(f,A,b,Aeq,beq,lb,ub) f 为目标函数系数,A,b 为不等式约束的系数, Aeq,beq 为等式约束系数, lb,ub 为x 的下 限和上限, fval 求解的x 所对应的值。 算法原理:单纯形法的改进方法投影法 ②.[x,fval ]=fmincon(fun,x0,A,b,Aeq,beq,lb,ub ) fun 为目标函数的M 函数, x0为初值,A,b 为不等式约束的系数, Aeq,beq 为等式约束
自动泊车系统的路径规划及跟踪 随着汽车保有量的增加,停车难成为普遍现象。车位空间的狭小导致了泊车过程中事故频发。 自动泊车系统的出现,可以有效避免在泊车过程中的安全事故。因此,自动泊车系统成为了国内外各大企业和研究机构的研究热点。 本文以前轮转向的内燃机车辆为研究对象,通过使用多项式函数对泊车路径进行规划,并且设计了模糊控制器,实现对泊车路径的跟踪。本文首先通过对泊车过程的工况进行分析,确立了车辆的运动学模型。 并在对平行车位、垂直车位和斜车位的多种情况进行分析之后,确定了以超声波传感器为基础的自动泊车系统的车位检测方法。通过使用MATLAB/Simulink 软件平台,分别对三种车位的检测逻辑进行仿真验证,并证实了该车位检测方法的可行性。 其次,本文根据车辆的几何关系确定了最小泊车车位尺寸以及路径规划中需要使用到的各项参数。同时通过对平行车位、垂直车位和斜车位三种情况下的泊车流程进行分析,在最短泊车路径的基础上,分别求解出了不同车位情况下的泊车起始位置区域。 为自动泊车系统的路径规划奠定基础。再次,本文采用多项式对泊车路径进行规划。 使用多项式进行路径规划计算简便,可保证路径曲率连续,同时可以满足转向系的要求。通过对泊车过程中可能发生的碰撞和泊车环境等进行分析,确定了规划路径的位置约束、姿态约束和避障约束。 通过MATLAB/Simulink分别计算出了三种车位情况下的可用泊车路径。为之
后的路径跟踪奠定良好的基础。 最后,通过对驾驶员的驾驶经验进行总结,确定了模糊控制器的输入、输出、隶属度函数和模糊逻辑。并通过MATLAB/Simulink软件平台,对泊车路径进行跟踪。 通过对后轴中点的位置误差、航向角误差和前轮转向角的分析,可以确定模糊控制器的有效性。
§15. 利用Matlab求解线性规划问题 线性规划是一种优化方法,Matlab优化工具箱中有现成函数linprog对如下式描述的LP问题求解: % min f'x % s.t .(约束条件):Ax<=b % (等式约束条件):Aeqx=beq % lb<=x<=ub linprog函数的调用格式如下: x=linprog(f,A,b) x=linprog(f,A,b,Aeq,beq) x=linprog(f,A,b,Aeq,beq,lb,ub) x=linprog(f,A,b,Aeq,beq,lb,ub,x0) x=linprog(f,A,b,Aeq,beq,lb,ub,x0,options) [x,fval]=linprog(…) [x, fval, exitflag]=linprog(…) [x, fval, exitflag, output]=linprog(…) [x, fval, exitflag, output, lambda]=linprog(…) 其中: x=linprog(f,A,b)返回值x为最优解向量。 x=linprog(f,A,b,Aeq,beq) 作有等式约束的问题。若没有不等式约束,则令 111
A=[ ]、b=[ ] 。 x=linprog(f,A,b,Aeq,beq,lb,ub,x0,options) 中lb ,ub为变量x的下界和上界,x0为初值点,options为指定优化参数进行最小化。 Options的参数描述: Display显示水平。选择’off’ 不显示输出;选择’I ter’显示每一步迭代过程的输出;选择’final’ 显示最终结果。 MaxFunEvals 函数评价的最大允许次数 Maxiter 最大允许迭代次数 TolX x处的终止容限 [x,fval]=linprog(…) 左端fval 返回解x处的目标函数值。 [x,fval,exitflag,output,lambda]=linprog(f,A,b, Aeq,beq,lb,ub,x0) 的输出部分: exitflag描述函数计算的退出条件:若为正值,表示目标函数收敛于解x 处;若为负值,表示目标函数不收敛;若为零值,表示已经达到函数评价或迭代的最大次数。 output 返回优化信息:output.iterations表示迭代次数;output.algorithm表示所采用的算法;outprt.funcCount表示函数评价次数。 lambda返回x处的拉格朗日乘子。它有以下属性: lambda.lower-lambda的下界; lambda.upper-lambda的上界; lambda.ineqlin-lambda的线性不等式; lambda.eqlin-lambda的线性等式。 112
ricanxinghuji实习小编一级|消息 | 我的百科 | 我的知道 | 百度首页 | 退出我的贡献草稿箱我的任务为我推荐 新闻网页贴吧知道MP3图片视频百科文库 帮助设置 ? ? ? ? ? ? ? ? ? ? ? ? ? ? 多目标规划 科技名词定义 中文名称:多目标规划 英文名称:multiple objective program 定义:生态系统管理中,为了同时达到两个或两个以上的目标,需要在许多可行性方案中进行选择的整个过程。 所属学科:
生态学(一级学科);生态系统生态学(二级学科) 本内容由全国科学技术名词审定委员会审定公布 多目标规划是数学规划的一个分支。研究多于一个的目标函数在给定区域上的最优化。又称多目标最优化。通常记为 MOP(multi-objective programming)。 目录 编辑本段 多目标规划 multiple objectives programming 数学规划的一个分支。研究多于一个目标函数在给定区域上的最优化。又称多目标最优化。通常记为 VMP。在很多实际问题中,例如经济、管理、军事、科学和工程设计等领域,衡量 多目标规划
一个方案的好坏往往难以用一个指标来判断,而需要用多个目标来比较,而这些目标有时不甚协调,甚至是矛盾的。因此有许多学者致力于这方面的研究。1896年法国经济学家 V. 帕雷托最早研究不可比较目标的优化问题,之后,J.冯·诺伊曼、H.W.库恩、A.W.塔克尔、A.M.日夫里翁等数学家做了深入的探讨,但是尚未有一个完全令人满意的定义。求解多目标规划的方法大体上有以下几种:一种是化多为少的方法,即把多目标化为比较容易求解的单目标或双目标,如主要目标法、线性加权法、理想点法等;另一种叫分层序列法,即把目标按其重要性给出一个序列,每次都在前一目标最优解集内求下一个目标最优解,直到求出共同的最优解。对多目标的线性规划除以上方法外还可以适当修正单纯形法来求解;还有一种称为层次分析法,是由美国运筹学家沙旦于70年代提出的,这是一种定性与定量相结合的多目标决策与分析方法,对于目标结构复杂且缺乏必要的数据的情况更为实用。 编辑本段 规划简史 多目标最优化思想,最早是在1896年由法国经济学家V.帕雷托提出来的。他从政治 数学规划 经济学的角度考虑把本质上是不可比较的许多目标化成单个目标的最优 化问题,从而涉及了多目标规划问题和多目标的概念。1947年,J.冯·诺伊曼和O.莫根施特恩从对策论的角度提出了有多个决策者在彼此有矛盾的情 况下的多目标问题。1951年,T.C.库普曼斯从生产和分配的活动中提出多目标最优化问题,引入有效解的概念,并得到一些基本结果。同年,H.W.库恩和 A.W.塔克尔从研究数学规划的角度提出向量极值问题,引入库恩-塔克尔有效解概念,并研究了它的必要和充分条件。1963年,L.A.扎德从控制论方面提出多指标最优化问题,也给出了一些基本结果。1968年,A.M.日夫里翁为了排除变态的有效解,引进了真有效解概念,并得到了有关的结果。自70年代以来,多目标规划的研究越来越受到人们的重视。至今关于多目标最优解尚无一种完全令人满意的定义,所以在理论上多目标规划仍处于发展阶段。 编辑本段 求解方法 化多为少的方法 即
优化与决策 ——多目标线性规划的若干解法及MATLAB实现 指导老师: XX教授 学生姓名: XX 多目标线性规划的若干解法及MATLAB实现 丁宏飞 (西南交通大学数学学院四川成都 610031)
摘要:求解多目标线性规划的基本思想大都是将多目标问题转化为单目标规划,本文介绍了理想点法、线性加权和法、最大最小法、目标规划法[1],然后给出多目标线性规划的模糊数学解法[2],最后对每种解法给出例子,并用Matlab 软件加以实现。 关键词:多目标线性规划 Matlab 模糊数学 Some solutions of Multi-objective linear programming and realized by Matlab Ding Hongfei School of Mathematics, Southwest Jiaotong University ,Chengdu, 610031 Abstract: The basic ideas to solve Multi-objective linear programming are transforming the multi-objective problem into single-objective planning, This paper introduces the ideal point method, linear weighted and law, max-min method, the goal programming method, then given multi-objective linear programming Fuzzy mathematics method, finally give examples of each method and used Matlab software to achieve. Key words: Multi-objective Linear Programming Matlab fuzzy mathematics 一.引言 多目标线性规划是多目标最优化理论的重要组成部分,由于多个目标之间的矛盾性和不可公度性,要求使所有目标均达到最优解是不可能的,因此多目标规划问题往往只是求其有效解(非劣解)。目前求解多目标线性规划问题有效解的方法,有理想点法、线性加权和法、最大最小法、目标规划法,然而这些方法对多目标偏好信息的确定、处理等方面的研究工作较少,本文也给出多目标线性规划的模糊数学解法。 二.多目标线性规划模型 多目标线性规划有着两个和两个以上的目标函数,且目标函数和约束条件全是线性函 数,其数学模型表示为: 11111221221122221122m ax n n n n r r r rn n z c x c x c x z c x c x c x z c x c x c x =+++?? =+++?? ? ?=+++? (1)
Matlab程序设计 课程大作业 题目名称:_________________________________ 班级:_________________________________ 姓名:_________________________________ 学号:_________________________________ 课程教师:温海骏 学期:2015-2016学年第2学期 完成时间: MATLAB优化应用 §1 线性规划模型 一、线性规划问题: 问题1:生产计划问题 假设某厂计划生产甲、乙两种产品,现库存主要材料有A类3600公斤,B类2000公斤,C类3000公斤。每件甲产品需用材料A类9公斤,B类4公斤,C类3公斤。每件乙产品,需用材料A类4公斤,B类5公斤,C类10公斤。甲单位产品的利润70元,乙单位产品的利润120元。问如何安排生产,才能使该厂所获的利润最大。 问题2:投资问题 某公司有一批资金用于4个工程项目的投资,其投资各项目时所得的净收益(投入资金百分比)如下表:工程项目收益表 工程项目 A B C D 收益(%) 15 10
12 由于某种原因,决定用于项目A的投资不大于其他各项投资之和而用于项目B和C的投资要大于项目D的投资。试确定该公司收益最大的投资分配方案。 问题3:运输问题 有A、B、C三个食品加工厂,负责供给甲、乙、丙、丁四个市场。三个厂每天生产食品箱数上限如下表: 工厂 A B C 生产数 60 40 50 四个市场每天的需求量如下表: 市场 甲 乙 丙 丁 需求量 20 35 33 34 从各厂运到各市场的运输费(元/每箱)由下表给出: 收点 发点 市场 甲 乙 丙 丁 工 厂 A 2 1 3 2 B
基于环视的自动泊车方法研究与系统设计汽车作为现代社会最为方便、快捷和有效的交通工具已日益普及,给人们带来便利的同时导致城市拥挤,停车难等问题异常突出。为解决泊车位紧缺和停车难带来的一系列交通拥挤等问题,泊车辅助越来越来被许多国家所重视。 为了提高泊车的效率和交通安全性,基于全景视觉的泊车辅助系统和自动泊车系统就成了辅助驾驶和智能车辆的关键技术和难点之一。本文主要研究了低成本的全景可视化的环视泊车辅助系统和基于视觉的自动泊车系统,具体而言,论文主要研究得工作如下:本文首先对环视泊车辅助系统进行了方案的初步设计,根据泊车辅助任务需求,将泊车辅助系统划分为环视泊车辅助模块和和自动泊车两个模块。 针对环视泊车辅助模块,一个重要的问题时如何完全消除泊车盲区和视觉死角,因此设计了低成本的基于四个摄像机图像信息融合的实时全景鸟瞰图用于泊车辅助。该模块具有易于实现、实时性强的特点。 同时,针对带广角镜头图像失真和多摄相机图像拼接融合等问题,详细介绍了摄像机模型及坐标系之间变换的推导过程。通过基于网格图案对车辆-四个摄像机进行了联合标定,利用逆透视变换,提出了基于特征点的图像拼接方法,并通过实际实验表明了该方法的有效性、准确性和可靠性。 其次,针对自动泊车模块,其核心问题是如何准确、可靠检测识别出停车位并对空停车位进行提取。为此,对现有检测识别方法存在准确率地和低鲁棒性等不足问题,本文提出了基于Radon变换的亮点特征检测识别的新方法来检测识别停车位。 然后提出了基于兴趣窗口的空停车位提取方法。实验证明,该方法能提高停
车位检测识别的正确性,并具有高的鲁棒性。 最后,针对自动泊车中的泊车路径规划和路径跟随控制问题。首先分析了车辆在泊车环境中即低速情况下,车辆在约束条件下的运动学模型。 根据运动学模型,考虑车辆相对于停车位的初始位姿,提出了改进双圆弧的垂直、平行泊车路径规划方法。仿真和实验证明,该方法生成的路径安全易控,同时利用航位推算结合改进的前馈-反馈预瞄方法的路径跟随控制,能达到良好的控制效果。
Pareto: In the single objective case, one attempts to obtain the best solution, which is absolutely superior to all other alternatives. 在单目标的情况下,一个试图以获得最佳的解决方案,这是绝对优于所有其他的替代品。 In the multiple objective case, there does not necessarily exist a solution that is best with respect to all objectives because of incommensurability and conflict among objectives. 在多个目标的情况下,不存在必然存在着一个解决方案,最好是不可通约性和目标之间的的冲突,因为所 有的目标。 There usually exist a set of solutions; nondominated solutions or Pareto optimal solutions, for the multiple objective case which cannot simply be compared with each other. 通常存在的一整套解决方案;非支配的解决方案或帕累托最优的解决方案,为多个目标的情况下,不能简单 地互相比较。 For a given nondominated point in the criterion space Z, its image point in the decision space S is called efficient or noninferior. A point in S is efficient if and only if its image in Z is nondominated. 对于一个给定的的标准空间z的非支配点,其形象在决定空间S点是所谓的效率或劣。非支配当且仅当其 在Z的形象是一个S点是有效的。 Definition 1: For a given point z0€Z, it is nondominated if and only if there does not exist another point z€Z such that, for the maximization case,where, z0 is a dominated point in the criterion space Z. Definition 2: For a given point x0€S, it is efficient if and only if there does not exist another point x€S such that, for the maximization case,where, x0 is inefficient.定义1:对于一个给定的点Z0属于Z,它非支配当 且仅当不存在另一点于属于z的,最大化的情况下,其中,Z0是在标准空间Z.的主导点 定义2:对于一个给定的点x0属于S,它是有效的当且仅当不存在另一点x属于S,最大化的情况下,其 中,X0是低效的。 Example 1: Two-objective (bicriteria) linear programming 例1:两个目标(bicriteria)线性规划 m ax We can observe that both regions are convex and the extreme points of Z are the images of extreme points of S. 我们可以观察到,这两个地区是凸的并且极端点的Z是极值点S的的图像。 The extreme points in the feasible region S of the decision space are shown in Fig. 4.1: 在可行区域的决策空间小号的极端点如图.4.1:
基于Matlab的多约束自动平行泊车轨迹规划 李红1,郭孔辉1,2,宋晓琳1,李飞龙1 【摘要】摘要:分析泊车轨迹曲线特点,在已有轨迹函数基础上提出新的轨迹函数,通过对实际泊车轨迹的拟合证明该函数的可用性。分析泊车环境中存在的可能碰撞点,建立相应的避撞约束函数。以泊车环境障碍约束、车辆自身参数约束、泊车初始点方位约束、泊车终点位置约束为轨迹函数的约束函数,以泊车终点车辆与车位夹角最小为目标函数建立单目标多约束轨迹方程。分别对一般泊车环境和狭小空间泊车环境进行泊车轨迹规划,利用Matlab软件非线性约束优化函数求得轨迹函数参数。仿真结果表明:对于一般泊车环境,该方法能满足泊车轨迹曲率连续性,使车辆无碰撞进入车位,并使车辆与车位平行;对于狭小空间泊车环境,虽未能使车辆与车位平行,但实现了车辆无碰撞地泊车入位并保证轨迹曲率的连续性。由此可知该方法可实现车辆无碰撞地泊车入位,并满足轨迹曲率连续性要求,有效地解决了泊车过程中停车转向问题。【期刊名称】中南大学学报(自然科学版) 【年(卷),期】2013(044)001 【总页数】7 【关键词】轨迹规划;自动泊车;避撞;多约束;优化 【文献来源】https://https://www.doczj.com/doc/9e1383533.html,/academic-journal-cn_journal-central-south-university-science-technology_thesis/0201248333038.html 自动泊车技术(auto-parking system,APS)是智能汽车技术的重要组成部分,其目的是辅助或者替代驾驶员完成车辆的安全泊位。随着汽车行业的发展,乘用车辆的普及,城市泊车空间越来越小,增加了驾驶员泊车的困难,因此,自
多目标非线性规划程序 M a t l a b Document serial number【NL89WT-NY98YT-NC8CB-NNUUT-NUT108】
f u n c t i o n[e r r m s g,Z,X,t,c,f a i l]= BNB18(fun,x0,xstat,xl,xu,A,B,Aeq,Beq,nonlcon,setts,options1,options2,maxSQPit,varargin ); %·Dêy1£Díóa·§¨μü′ú·¨£úDê1ó£DèOptimization toolbox §3 % Minimize F(x) %subject to: xlb <= x <=xub % A*x <= B % Aeq*x=Beq % C(x)<=0 % Ceq(x)=0 % % x(i)éaáD±á£êy£ò1ì¨μ % ê1óê %[errmsg,Z,X]=BNB18('fun',x0,xstat,xl,xu,A,B,Aeq,Beq,'nonlcon',setts) %fun£o Mt£±íê×Dˉ±êoˉêyf=fun(x) %x0: áDòᣱíê±á3μ %xstat£o áDòá£xstat(i)=0±íêx(i)aáD±á£1±íêêy£2±íê1ì¨μ %xl£o áDòᣱíê±á %xu: áDòᣱíê±áé %A: ó, ±íêD2μèêêμêy %B: áDòá, ±íêD2μèêêé %Aeq: ó, ±íêDμèêêμêy %Beg: áDòá, ±íêD2μèêêóòμ %nonlcon: Mt£±íê·Dêoˉêy[C,Ceq]=nonlin(x),DC(x)a2μèêê, % Ceq(x)aμèêê %setts: ·¨éè %errmsq: ·μ′íóìáê %Z: ·μ±êoˉêy×Dμ %X: ·μ×óa % %àyìa % max x1*x2*x3 % -x1+2*x2+2*x3>=0 % x1+2*x2+2*x3<=72 % 10<=x2<=20 % x1-x2=10 % èD′ Moˉêy % function f=discfun(x) % f=-x(1)*x(2)*x(3); %óa % clear;x0=[25,15,10]';xstat=[1 1 1]'; % xl=[20 10 -10]';xu=[30 20 20]'; % A=[1 -2 -2;1 2 2];B=[0 72]';Aeq=[1 -1 0];Beq=10; % [err,Z,X]=BNB18('discfun',x0,xstat,xl,xu,A,B,Aeq,Beq); % XMAX=X',ZMAX=-Z %
MATLAB 语言应用————最优化 MATLAB 编程线性规划问题 第二章0-1规划 MATLAB 的0-1规划函数bintprog 是针对下述0-1规划: 12min *.**[,,],01,1,2,n i z f x s t A x b aeq x beq x x x x x or i n L L ()解0-1规划()的0-1规划函数bintprog 表述为 [x, fv, exitflag, output]= bintprog(f,A,b,aeq, beq) ()输入部分: f 为目标函数,实为目标函数的系数。 A 为()中的不等式约束矩阵 b 为()中的不等式约束向量 aeq 为()中的等式约束矩阵 beq ()中的等式约束向量 输出部分: x 为最优解fval 为最优值 exitflag 为输出标志 exitflag=1,有最优解exitflag=0,迭代次数超过设定次数exitflag==-2,约束区域不可行 exitflag=-3,问题无解 output ,表明算法和迭代情况如果我们不需要了解迭代情况和存储情况,可将 0-1规划函数bintprog 写成[x, fv, ex]= linprog(f,A,b,aeq, beq) () 在函数bintprog 中,输入或输出元素的符号可以变更,如()中 ex 仍为输出标志,但元素的符号位置不能变更。在输出部分,如有缺者,可用 []号代替。函数bintprog 的使用要点与函数linprog 的使用要点相同。 函数是为求目标函数的最小值而设置的, 如要求函数的最大值,可先求出()f 的最小值fv ,则fv 必为f 的最大值。 例一用函数bintprog 求解下列0-1规划用MA TLAB 语言编程如下:
第41卷 第2期吉林大学学报(工学版) V ol.41 No.22011年3月 Journal of Jilin University(Engineering and Technology Edition) M ar.2011收稿日期:2010-01- 06.基金项目:“863”国家高技术研究发展计划项目(2006AA11A122). 作者简介:姜辉(1981-),女,博士研究生.研究方向:汽车动态模拟与仿真.E-mail:jiang hui0608@163.com通信作者:郭孔辉(1935-) ,男,教授,博士生导师,中国工程院院士.研究方向:汽车动力学,人-车闭环评价,驾驶员模拟和轮胎力学特性.E-mail:guo.konghui@ascl.j lu.edu.cn基于路径规划的自动平行泊车转向控制器 姜 辉,郭孔辉,张建伟 (吉林大学汽车动态模拟国家重点实验室,长春130022 )摘 要:分析了汽车低速倒车过程中的运动学特性,以及汽车在倒车过程中车身与停车位以及障碍物之间可能发生的碰撞, 同时根据汽车与车位之间的几何约束规划倒车路径,确定平行泊车的预备倒车区域,实现平行泊车的转向策略,以便追踪规划的路径,避免发生碰撞。在SIM-ULINK中搭建某轿车的运动学模型以及模拟平行泊车的倒车环境。将转向控制策略引入应用SIMULINK所建立的系统中仿真模拟该轿车的平行泊车过程。通过仿真验证了该策略实现平行泊车的可行性。 关键词:车辆工程;平行泊车;路径规划;碰撞分析;仿真 中图分类号:U471.15 文献标志码:A 文章编号:1671-5497(2011)02-0293- 05Design of automatic parallel parking steering controller based on path-planningJIANG Hui,GUO Kong -hui,ZHANG Jian-wei(State Key Laboratory of Automobile Dynamic Simulation,Jilin University,Changchun130022,China)Abstract:The kinematic behavior of the car in the low-speed back-up process and the collisionpossibility between the car body and the obstacle in the parking space were analyzed,and the startingarea for the back-up under parallel parking condition was determined according to the back-up pathfrom the geometric constrains of the car body by the parking space.A steering strategy for the parallelparking was realized to trace the planned path to avoid collision.A kinematic model was built for acertain car in SIMULINK to simulate the car back-up environment of parallel parking.The parallelparking process of the car was simulated by introducing the steering control strategy into the systembuilt using SIMULINK.The simulated results verified the feasibility to realize the parallel parking bythe proposed strategy .Key words:vehicle engineering;parallel parking;path-planning;collisions analysis;simulation 早在20世纪90年代初期,Murray和Sastry 等就对泊车问题进行了大量的理论研究,Paromtchik和Laug iert等陆续提出了规划特定路线泊车的操作理论[1- 3]。本文以某国产A0级轿车的平行泊车为例根据停车空间的几何形状、 车辆的动力学模型、倒车过程中的碰撞约束等,预先规划泊车路径,完成小空间的泊车。 1 汽车的运动学模型 在不考虑轮胎侧滑的低速倒车范围内,任意
10.16638/https://www.doczj.com/doc/9e1383533.html,ki.1671-7988.2019.08.016 基于微分平坦的平行泊车路径规划 叶茂,季鑫,赵叶鑫 (长安大学汽车学院,陕西西安710064) 摘要:为提高泊车成功率,降低泊车路径规划耗时,提出基于微分平坦理论的平行泊车路径规划方法。泊车路径满足三类约束:为保证行驶安全,综合考虑可能碰撞情况,建立避障约束函数;为满足停放要求,建立了终点状态的约束函数;为保证路径可跟踪,建立了方向盘角度,转角速度和车速的约束函数。利用Matlab非线性约束优化函数求得路径参数。仿真结果表明:该方法鲁棒性强,对车辆初始位置和方位角要求不高,解决了必须从特定位姿开始泊车的问题,增加灵活性和成功率;对于一般泊车环境该方法能得到曲率和车速缓慢变化的轨迹,有效解决了中途停车转向的问题;规划的轨迹满足避撞约束、车辆自身的约束、泊车停放要求、方向盘转角和转角速度约束;基于微分平坦的路径规划方法,降低了计算复杂度,缩短了规划时间,提高了泊车成功率。 关键词:平行泊车;路径规划;微分平坦;鲁棒性 中图分类号:U467 文献标识码:A 文章编号:1671-7988(2019)08-51-04 Parallel Parking Trajectory Planning Based on Differential Flatness Ye Mao, Ji Xin, Zhao Yexin (School of Automobile, Chang’an University, Shaanxi Xi’an 710064) Abstract: In order to improve the parking success rate and reduce the time-consuming of planning of parking path, a parallel parking path planning method based on differential flat theory was proposed. The parking path satisfies three types of constraints: in order to ensure driving safety, possible collision situations was considered. then obstacle avoidance constraint function was established; in order to meet the parking requirements, a constraint function of the end state was established; to ensure that the path can be tracked, the constraint function of steering wheel angle and speed was established.. The path parameters was obtained by using the matlab nonlinear constrained optimization function. The simulation results show that the method is robust and has low requirements on the initial position and azimuth of the vehicle. It solves the problem that parking must start from a specific pose, increasing flexibility and success rate. For the general parking environment, a trajectory with small curvature and slow change of vehicle speed can be obtained, which effectively solves the problem of midway stop with steering; the planned trajectory satisfies collision avoidance constraint, vehicle's own constraints, parking parking requirements, steering wheel angle and corner speed constraint; The path planning method based on differential flatness can reduce computational complexity, shorten planning time, and improve parking success rate. Keywords: parallel parking; path planning; differential flatness; robustness CLC NO.: U467 Document Code: A Article ID: 1671-7988(2019)08-51-04 前言 汽车数量急剧增加使城市泊车难题日益突出,密歇根大学的Paul Green 的调查研究就已经表明:泊车所导致的事故占各类交通事故的比重已高达44%[1]。居高不下的泊车事故促使汽车厂商和科研人员对自动泊车技术的研究与开发。早期对泊车的研究主要是通过超声波或者倒车影像技术对倒车 作者简介:叶茂(1994-),男,硕士研究生,就读于长安大学。 51