
FANUC机器人示教器的简单认识
示教器是主管应用工具软件与用户(机器人)之间的接口操作装置。示教器通过电缆与控制柜连接。我们在机器人的点动进给、程序创建、程序的测试执行、操作执行和姿态确认等等操作时都会使用示教器。
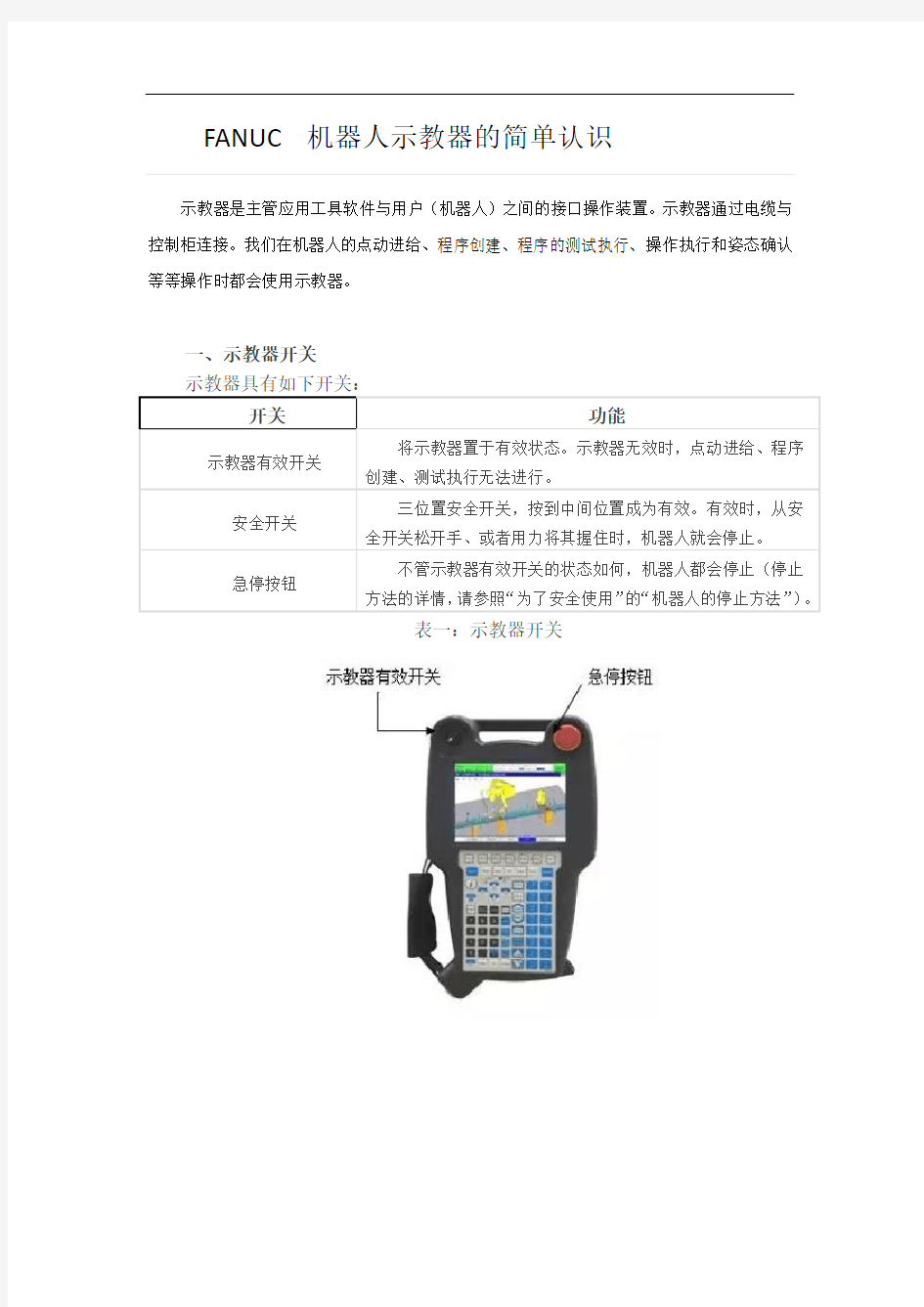
一、示教器开关
示教器具有如下开关:
开关功能
示教器有效开关
将示教器置于有效状态。示教器无效时,点动进给、程序创建、测试执行无法进行。
安全开关
三位置安全开关,按到中间位置成为有效。有效时,从安全开关松开手、或者用力将其握住时,机器人就会停止。
急停按钮
不管示教器有效开关的状态如何,机器人都会停止(停止方法的详情,请参照“为了安全使用”的“机器人的停止方法”)。
表一:示教器开关
二、示教器按键
示教器按键由与菜单相关的按键、与点动相关的按键、与执行相关的按键、与编辑相关的按键和其他按键组成。
(1)与应用相关的按钮
按键功能
功能键(F),用来选择画面最下行的功
能键菜单。
NEXT(翻页)键将功能键菜单切换到
下一页。
按下[MENU](菜单)键,显示出画面
菜单。
FCTN(辅助)键用来显示辅助菜单。
SELECT(一览)键用来显示程序一览
画面。
EDIT(编辑)键用来显示程序编辑界
面。
DATA(数据)键用来显示数据画面。
POSN(位置显示)键用来显示当前位
置画面。
单独按下的情况下,移动操作对象画
面。
在与SHIFT键同时按下的情况下,分
割屏幕(单屏、双屏、三屏)。
单独按下的情况下,移动到提示画面。
在于SHIFT键同时按下的情况下,移
动到报警界面。
单独按下时,按照G1→G1S→G2→G
2S→…的顺序,依次切换组、副组。
按住GROUP(组切换)键的同时,按
住希望变更的组号码的数字键,即可变更为
该组。
HANDLING TOOL(搬运工具)用示
教器上的应用专用按键。应用专用按键根据
应用而有所不同。
注释: GROUP键,只有在订购了多动作和附加轴控制的软件选项,追加并启动附加轴和独立附加轴的情况下才有效。
按键功能
SHIFT键与其他键同时按下时,可以进
行点动进给、位置数据的示教、程序的启动。
左右的SHIFT键功能相同。
COORD(手动进给坐标系)键,用来切
换手动进给坐标系。依次进行如下切换;“关
节”→“手动”→“世界”→“工具”→“用
户”→“关节”。当同时按下此键与SHIFT
键时,出现用来进行坐标系切换的点动菜
单。
倍率键用来进行速度倍率的变更。依次
进行如下切换:“VFINE(微速)”→“FIN
E(低速)”→“1%→5%→50%→100%”(5%
以下时以1%为刻度切换,5%以上时以5%为
刻度切换)。
点动键,与SHIFT键同时按下可以进行
点动进给。
J7、J8用于同一群组内的附加轴点动进
给。但是,5轴机器人和4轴机器人等不到
6轴的机器人的情况下,从空闲中的按键起
依次使用。(例:5轴机器人上,将J6、J7、
J8键用于附加轴的点动进给)
※J7、J8键的效果设定可进行变更。
详情请参照相关说明书。
按键功能
FED(前进)键、BDW(后退)键(+SHIFT键)
用于程序的启动。
程序执行中松开SHIFT键时,程序执行暂停。
HOLD(暂停)键,用来中断程序的执行。
STEP(单步/连续)键,用于测试运转时的单步执
行和连续执行的切换。
(4):其他按键
按键功能
PREV(返回)键,用于返回到上一级。
只有有从属关系的菜单才能够返回。相互独立
的菜单或界面不能返回。
ENTER(输入)键,用于数值的输入和菜
单的选择。
BACK SPACE(取消)键,用来删除光
标位置之前一个字符或数字。
光标键用来移动光标。
ITEM(项目选择)键,用于输入行号后
移动光标至该行。