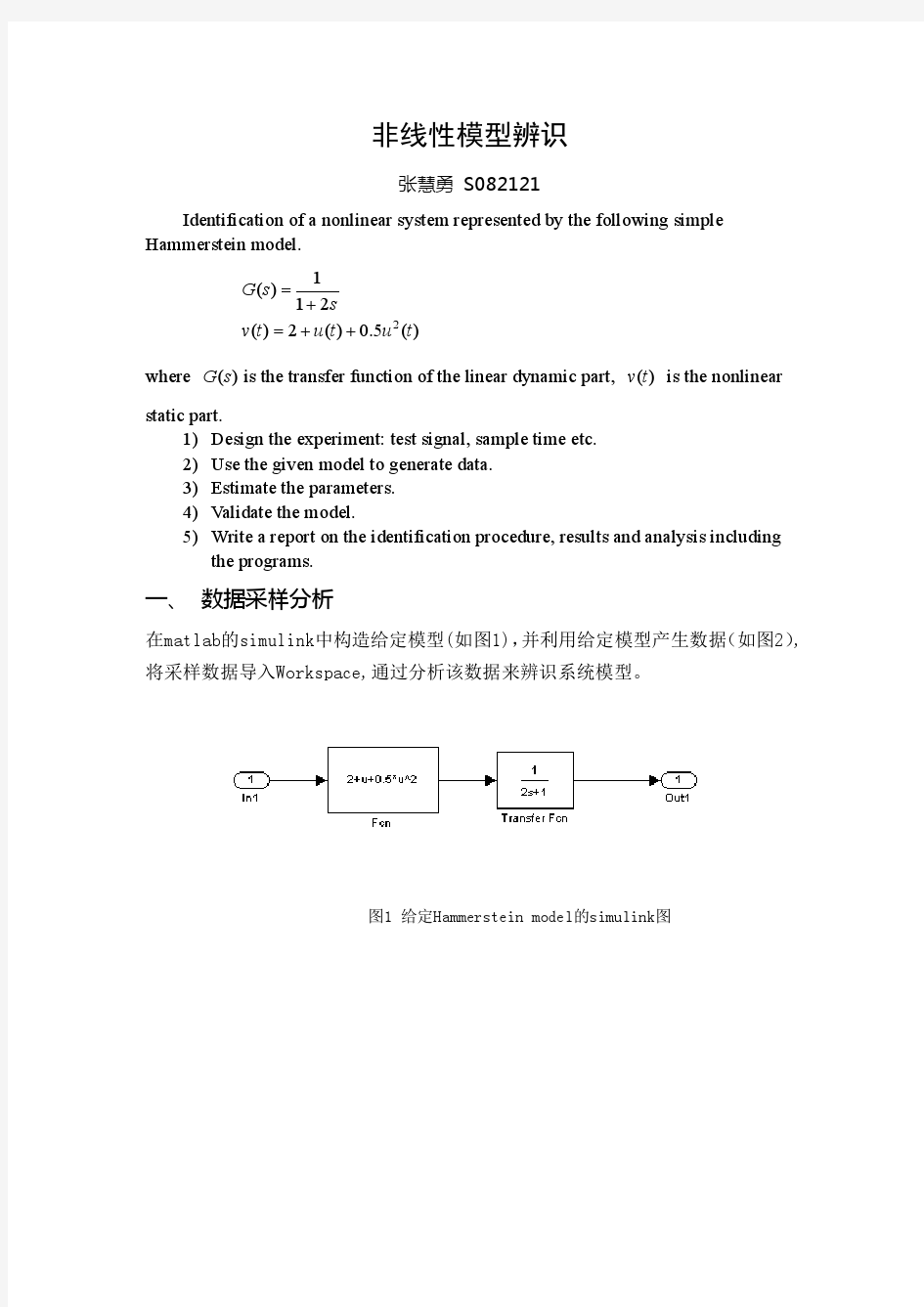
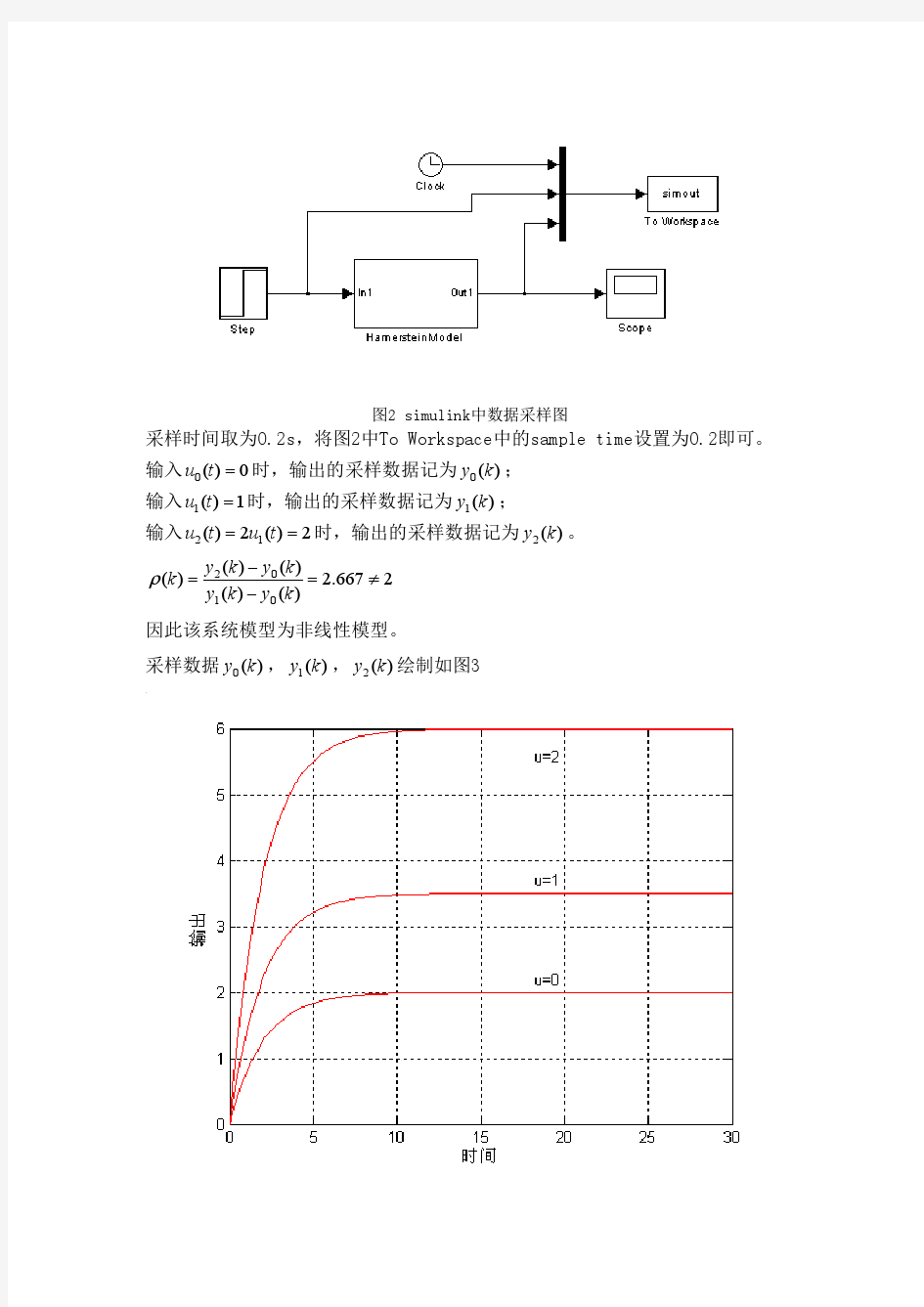
毕业设计开题报告 电气工程与自动化 非线性Hammerstein模型的辨识 一、选题的背景与意义 系统辨识是是现代控制理论中的一个重要分支。通过辨识建立数学模型的目的是估计表征系统行为的重要参数,建立一个能模仿真实系统行为的模型,用当前可测量的系统的输入和输出预测系统输出的未来演变,以及控制器的设计。非线性系统辨识是系统辨识的一个重要的发展方向,一直是现代辨识领域中的一个主要课题,对其研究有十分重要的理论和实际意义。非线性问题的主要困难之一是一直缺乏描述各种非线性系统特性的统一的数学模型。为此,人们提出了多种类型的模型,如块联模型]1[、神经网络模型]2[、双线性模型]3[、非线性参数模型等等。 Hammerstein模型属于块联模型,由一个线性动态系统跟随一个非线性静态模块构成。自从Narendra& Gallman 1966年提出了Hammerstein模型后]4[,由于模型结构简单且能有效地描述常见的非线性动态系统特性,所以许多学者相继研究了Hammerstein模型参数的估计方法,近年来Hammerstein模型被广泛地应用于非线性系统辨识。辨识Hammerstein模型的意义在于:利用辨识结果获得中间层输出,选择合适的性能指标,就可以把原非线性系统的控制问题分解为线性模块的动态优化问题和非线性模块的静态求根问题,因此可以有效结合线性模型预测控制的成熟理论解决这类非线性对象的控制问题,避免传统非线性控制方法计算量大,收敛性和闭环稳定性不能得到保证等诸多问题。 二、研究的基本内容与模拟解决的主要问题: 针对Hammerstein模型的辨识问题,可以归结为线性模块的动态优化问题和非线性模块的静态求根问题。因此研究的重点就是如何运用比较新颖的优化算法得到Hammerstein模型的参数解集,并能通过和传统算法的比较论证阐述采用方法的合理性,可行性及有效性。具体需要解决的问题包括以下几点: 1.什么是Hammerstein模型,它的基本结构式怎么样的; 2.确定Hammerstein非线性系统辨识的思想和实现方法; 3.熟悉PSO/BFO优化算法和熟悉最小二乘法估计方法;
通过动态非线性偏最小二乘法对非线性模型进行预测以及控制 G. BAFFI, J. MORRIS and E. MARTIN 过程分析与控制技术中心,纽卡斯尔大学,纽卡斯尔,英国 通过动态非线性偏最小二乘(PLS )模型,模型预测控制(MPC)技术延伸到了非线性系统。对于嘈杂的建模,PLS显示有适合它的多元回归方法,相关性以及/或者总线的数据。在一个“静态”框架内,这种方法已广泛应用于工业过程一些数据的建模和分析中。本文的贡献是对于非线性动态PLS框架在MPC应用中的发展。该非线性动态PLS模型利用了一个基于误差的非线性偏最小二乘算法,其中非线性内部模型是建立于自回归与外源输入(ARX )框架。特别地,我们应该将二次和前馈神经网络内部模型考虑在内。一个MPC框架内的一个动态的PLS模型的应用开辟了一种基于多元统计基础的预测方法,这一方法不仅应用于过程建模,推理估计和性能监控,同时也可进行模型预测控制。一个基准仿真的pH值中和系统验证了非线性动态PLS框架在模型预测控制中的应用。 关键词:模型预测控制,非线性动态偏最小二乘
引言 模型预测控制(MPC )正成为一种常规的采用先进的过程控制策略。基于线性过程模型的MPC算法已被广泛研究并应用于化工流程工业。这主要归功于它们处理过程约束,时间延迟和多变量系统的能力。然而,许多过程是高度非线性的,并且,基于线性过程模型的MPC算法可能会导致控制性能不佳;这样一来,MPC技术就延伸到了非线性过程1-6。 在MPC中,感知的过程动态模型首先发展为预测过程在未来一定时间内的输出值。这些数值被用来评估未来的控制动作,以减少预定义的代价函数。基于程控制策略的过程建模和模型都是特别依赖于感兴趣的系统中的适当的数学表达式的可利用性。一种方法是通过基于详细的化学和物理现象的知识原理的机理原理以及模型的发展来确定过程行为。虽然一些非线性的MPC方法已经应用于基于非线性的展开机理模型,但是由于他们的发展需要详细知识和时间,这一方法未能受到广泛的应用6。此外,在现代这个响应式的制造环境中,对于复杂的多产品生产家,精确的理论模型的研发甚至可能不实用。 由于一些正在研究的不具体的过程知识比那些需要制定一个物理原理模型更加具有需求性,从过程操作数据鉴定而来的以经验数据为基础的模型提供了另一种机械建模。在工业流程上,这使得非线性的MPC算法得到了更广泛的应用。这种结构包括多项式自回归滑动平均模型(ARMA)3,Volterra级数模型5,7和神经网络模型8,9。当那些属于基本过程表示的是相关过程变量性质的正在发展的经验表示模型时,一个重要的、潜在的甚至严重的问题产生了。无视相关结构能够严重影响用于获得该模型的非线性优化技术参数。一种解决方案是应用基于偏最小二乘(PLS )建模技术的多变量的统计预测,且这种建模技术考虑到了数据底层结构的相关性。 这项工作的目的是评估动态非线性PLS在MPC应用上的适用性。一个良好已知的基准pH中和模型10已应用于测试动态非线性偏最小二乘回归模型及其在非线性PLS MPC方案中的使用。严重的非线性特征提供了一个主要的建模挑战。
第四章 等效电路模型参数在线辨识 通过第三章函数拟合的方法可以确定钒电池等效电路模型中的参数,但是在实际运行过程中模型参数随着工作环境温度、充放电循环次数、SOC 等因素发生变化,根据离线试验数据计算得到的参数值估算电池SOC 可能会造成较大的估计误差。因此,在实际运行时,应对钒电池等效电路模型参数进行在线辨识,做出实时修正,提高基于模型估算SOC 的精度。 4.1 基于遗忘因子的最小二乘算法 参数辨识是根据被测系统的输入输出来,通过一定的算法,获得让模型输出值尽量接近系统实际输出值的模型参数估计值。根据能否实时辨识系统的模型参数,可以将常用的参数辨识方法分为离线和在线两类,离线辨识只能在数据采集完成后进行,不能对系统模型实时地在线调整参数,对于具有非线性特性的电池系统往往不能得到满意的辨识结果;在线辨识方法一般能够根据实时采集到的数据对系统模型进行辨识,在线调整系统模型参数。常用的辨识方法有最小二乘法、极大似然估计法和Kalman 滤波法等。因最小二乘法原理简明、收敛较快、容易理解和掌握、方便编程实现等特点,在进行电池模型参数辨识时采用了效果较好的含遗忘因子的递推最小二乘法。 4.1.1 批处理最小二乘法简介 假设被辨识的系统模型: 12121212()()()1n n n n b z b z b z y z G z u z a z a z a z ------+++==++++L L (4-1) 其相应的差分方程为: 1 1 ()()()n n i i i i y k a y k i b u k i ===--+-∑∑(4-2) 若考虑被辨识系统或观测信息中含有噪声,则被辨识模型式(4-2)可改写为: 1 1 ()()()()n n i i i i z k a y k i b u k i v k ===--+-+∑∑(4-3) 式中, ()z k 为系统输出量的第k 次观测值;()y k 为系统输出量的第k 次真值,()y k i -为系统输出量的第k i -次真值;()u k 为系统的第k 个输入值,()u k i -为 系统的第k i -个输入值;()v k 为均值为0的随机噪声。
9 显式非线性动态分析 在前面的章节中,已经考察了显式动态程序的基本内容;在本章中,将对这个问题进行更详细的讨论。显式动态程序对于求解广泛的、各种各样的非线性固体和结构力学问题是一种非常有效的工具。它常常对隐式求解器是一个补充,如ABAQUS/Standard;从用户的观点来看,显式与隐式方法的区别在于: ?显式方法需要很小的时间增量步,它仅依赖于模型的最高固有频率,而与载荷的类型和持续的时间无关。通常的模拟需要取10,000至1,000,000个增量步,每个增量步的计算成本相对较低。 ?隐式方法对时间增量步的大小没有内在的限制;增量的大小通常取决于精度和收敛情况。典型的隐式模拟所采用的增量步数目要比显式模拟小几个数量级。然而,由于在每个增量步中必须求解一套全域的方程组,所以对于每一增量步的成本,隐式方法远高于显式方法。 了解两个程序的这些特性,能够帮助你确定哪一种方法是更适合于你的问题。9.1 ABAQUS/Explicit适用的问题类型 在讨论显式动态程序如何工作之前,有必要了解ABAQUS/Explicit适合于求解哪些类问题。贯穿这本手册,我们已经提供了贴切的例题,它们一般是应用ABAQUS/Explicit求解的如下类型问题: 高速动力学(high-speed dynamic)事件 最初发展显式动力学方法是为了分析那些用隐式方法(如ABAQUS/Standard)分析起来可能极端费时的高速动力学事件。作为此类模拟的例子,在第10章“材料”中分析了一块钢板在短时爆炸载荷下的响应。因为迅速施加的巨大载荷,结构的响应变化的非常快。对于捕获动力响应,精确地跟踪板内的应力波是非常重要的。由于应力波与系统的最高阶频率相关联,因此为了得到精确解答需要许多小的时间增量。
非线性回归预测法 前面所研究的回归模型,我们假定自变量与因变量之间的关系是线性的,但社会经济现象是极其复杂的,有时各因素之间的关系不一定是线性的,而可能存在某种非线性关系,这时,就必须建立非线性回归模型。 一、非线性回归模型的概念及其分类 非线性回归模型,是指用于经济预测的模型是曲线型的。常见的非线性回归模型有下列几种: (1)双曲线模型: i i i x y εββ++=1 2 1 (3-59) (2)二次曲线模型: i i i i x x y εβββ+++=2321 (3-60) (3)对数模型: i i i x y εββ++=ln 21 (3-61) (4)三角函数模型: i i i x y εββ++=sin 21 (3-62) (5)指数模型: i x i i ab y ε+= (3-63) i i i x x i e y εβββ+++=221110 (3-64) (6)幂函数模型: i b i i ax y ε+= (3-65) (7)罗吉斯曲线: i x x i i i e e y εββββ++=++1101101 (3-66) (8)修正指数增长曲线: i x i i br a y ε++= (3-67) 根据非线性回归模型线性化的不同性质,上述模型一般可细分成三种类型。 第一类:直接换元型。 这类非线性回归模型通过简单的变量换元可直接化为线性回归模型,如:(3-59)、(3-60)、(3-61)、(3-62)式。由于这类模型的因变量没有变形,所以可以直接采用最小平方法估计回归系数并进行检验和预测。 第二类:间接代换型。 这类非线性回归模型经常通过对数变形的代换间接地化为线性回归模型,如:(3-63)、(3-64)、(3-65)式。由于这类模型在对数变形代换过程中改变了因变量的形态,使得变形后模型的最小平方估计失去了原模型的残差平方和为最小的意义,从而估计不到原模型的最佳回归系数,造成回归模型与原数列之间的较大偏差。 第三类:非线性型。
Communications and Control Engineering For other titles published in this series,go to https://www.doczj.com/doc/9d4121260.html,/series/61
Series Editors A.Isidori J.H.van Schuppen E.D.Sontag M.Thoma M.Krstic Published titles include: Stability and Stabilization of In?nite Dimensional Systems with Applications Zheng-Hua Luo,Bao-Zhu Guo and Omer Morgul Nonsmooth Mechanics(Second edition) Bernard Brogliato Nonlinear Control Systems II Alberto Isidori L2-Gain and Passivity Techniques in Nonlinear Control Arjan van der Schaft Control of Linear Systems with Regulation and Input Constraints Ali Saberi,Anton A.Stoorvogel and Peddapullaiah Sannuti Robust and H∞Control Ben M.Chen Computer Controlled Systems E?m N.Rosenwasser and Bernhard https://www.doczj.com/doc/9d4121260.html,mpe Control of Complex and Uncertain Systems Stanislav V.Emelyanov and Sergey K.Korovin Robust Control Design Using H∞Methods Ian R.Petersen,Valery A.Ugrinovski and Andrey V.Savkin Model Reduction for Control System Design Goro Obinata and Brian D.O.Anderson Control Theory for Linear Systems Harry L.Trentelman,Anton Stoorvogel and Malo Hautus Functional Adaptive Control Simon G.Fabri and Visakan Kadirkamanathan Positive1D and2D Systems Tadeusz Kaczorek Identi?cation and Control Using Volterra Models Francis J.Doyle III,Ronald K.Pearson and Babatunde A.Ogunnaike Non-linear Control for Underactuated Mechanical Systems Isabelle Fantoni and Rogelio Lozano Robust Control(Second edition) Jürgen Ackermann Flow Control by Feedback Ole Morten Aamo and Miroslav Krstic Learning and Generalization(Second edition) Mathukumalli Vidyasagar Constrained Control and Estimation Graham C.Goodwin,Maria M.Seron and JoséA.De Doná Randomized Algorithms for Analysis and Control of Uncertain Systems Roberto Tempo,Giuseppe Cala?ore and Fabrizio Dabbene Switched Linear Systems Zhendong Sun and Shuzhi S.Ge Subspace Methods for System Identi?cation Tohru Katayama Digital Control Systems Ioan https://www.doczj.com/doc/9d4121260.html,ndau and Gianluca Zito Multivariable Computer-controlled Systems E?m N.Rosenwasser and Bernhard https://www.doczj.com/doc/9d4121260.html,mpe Dissipative Systems Analysis and Control (Second edition) Bernard Brogliato,Rogelio Lozano,Bernhard Maschke and Olav Egeland Algebraic Methods for Nonlinear Control Systems Giuseppe Conte,Claude H.Moog and Anna M.Perdon Polynomial and Rational Matrices Tadeusz Kaczorek Simulation-based Algorithms for Markov Decision Processes Hyeong Soo Chang,Michael C.Fu,Jiaqiao Hu and Steven I.Marcus Iterative Learning Control Hyo-Sung Ahn,Kevin L.Moore and YangQuan Chen Distributed Consensus in Multi-vehicle Cooperative Control Wei Ren and Randal W.Beard Control of Singular Systems with Random Abrupt Changes El-Kébir Boukas Nonlinear and Adaptive Control with Applications Alessandro Astol?,Dimitrios Karagiannis and Romeo Ortega Stabilization,Optimal and Robust Control Aziz Belmiloudi Control of Nonlinear Dynamical Systems Felix L.Chernous’ko,Igor M.Ananievski and Sergey A.Reshmin Periodic Systems Sergio Bittanti and Patrizio Colaneri Discontinuous Systems Yury V.Orlov Constructions of Strict Lyapunov Functions Michael Malisoff and Frédéric Mazenc Controlling Chaos Huaguang Zhang,Derong Liu and Zhiliang Wang Stabilization of Navier–Stokes Flows Viorel Barbu Distributed Control of Multi-agent Networks Wei Ren and Yongcan Cao
浅析电力系统模型参数辨识 (贵哥提供) 一、现状分析 随着我国电力事业的迅猛发展, 超高压输电线路和大容量机组的相继投入, 对电力系统稳定计算、以及其安全性、经济性和电能质量提出了更高的要求。现代控制理论、计算机技术、现代应用数学等新理论、新方法在电力系统的应用,正在促使电力工业这一传统产业迅速走向高科技化。 我国大区域电网的互联使网络结构更复杂,对电力系统安全稳定分析提出了更高的要求,在线、实时、精确的辨识电力系统模型参数变得更加紧迫。由于电力系统模型的基础性、重要性,国外早在上世纪三十年代就开始了这方面的分析研究,[1,2]国内外的电力工作者在模型参数辨识方面做了大量的研究工作。[3]随后IEEE相继公布了有关四大参数的数学模型。1990年全国电网会议上的调查确定了模型参数的地位,促进了模型参数辨识的进一步发展,并提出了研究发电机、励磁、调速系统、负荷等元件的动态特性和理论模型,以及元件在极端运行环境下的动态特性和参数辨识的要求。但传统的测量手段,限制了在线实时辨识方法的实现。 同步相量测量技术的出现和WAMS系统的研究与应用,使实现在线实时的电力系统模型参数辨识成为可能。同步相量是以标准时间信号GPS作为同步的基准,通过对采样数据计算而得的相量。相量测量装置是进行同步相量测量和输出以及动态记录的装置。PMU的核心特征包括基于标准时钟信号的同步相量测量、失去标准时钟信号的授时能力、PMU与主站之间能够实时通信并遵循有关通信协议。 自1988年Virginia Tech研制出首个PMU装置以来,[4]PMU技术取得了长足发展,并在国内外得到了广泛应用。截至2006年底,在我国范围内,已有300多台P MU装置投入运行,并且可预计,在不久的将来PMU装置会遍布电力系统的各个主要电厂和变电站。这为基于PMU的各种应用提供了良好的条件。 二、系统辨识的概念 系统模型是实际系统本质的简化描述。[5]模型可分为物理模型和数学模型两大类。物理模型是根据相似原理构成的一种物理模拟,通过模型试验来研究系统的
系统辨识综述 张培硕研4班 摘要:本文主要介绍了系统辨识中的非线性系统辨识方法,包括多层递阶辨识方法,以及把神经网络、模糊逻辑、遗传算法等知识应用于非线性系统辨识而得到的一些新型辨识方法,最后概括了非线性系统辨识未来的发展方向。 关键词:非线性系统辨识;多层递阶;神经网络 1 引言 系统辨识作为现代控制论和信号处理的重要内容,是近几十年发展起来的一门学科,它研究的基本问题是如何通过运行(或实验)数据来建立控制与处理对象(或实验对象)的数学模型。因为系统的动态特性被认为必然表现在它变化着的输入/输出数据之中,辨识就是利用数学方法从数据序列中提炼出系统的数学模型。 从本质上说,系统辨识是一种优化问题,当前常用辨识算法的基本方法是通过建立系统的参数模型,把辨识问题转化为参数估计问题。这类算法能较好地解决线性系统或本质线性系统的辨识问题,但若要应用于本质非线性系统则比较困难。可是,真实世界中的模型都不是严格线性的,它们或多或少都表现出非线性特性,因此越来越多的非线性现象和非线性模型己经引起了人们广泛的重视。 非线性系统广泛的存在于人们的生产生活中,随着人类社会的发展进步,越来越多的非线性现象和非线性系统已经引起研究者们的广泛关注,混沌现象的发现被誉为“ 二十世纪三大发现之一” 。目前关于非线性理论的研究正处于发展阶段。建立描述非线性现象和非线性系统的模型是研究非线性问题的基础。线性系统辨识理论已经趋于成熟,但一般的线性模型实际上是某些非线性被忽略或用线性关系代替后得到的对真实系统的近似数学描述。随着科学技术的迅猛发展,控制系统越来越复杂,对控制精度的要求越来越高,具有复杂非线性的系统不能用线性模型来近似,所以研究非线性系统辨识理论有着很重要的实际意义。 对于非线性系统参数模型的辨识问题,人们最早涉及的是某些特殊类型的非线性系统,如双线性系统模型、Hammerstain 模型、Wiener 模型、非线性时间序列模型、输出仿射模型等。针对每一类特殊模型,各国学者都作了大量的工作,提出了不少辨识算法。同时,也对这些算法的估计一致性问题进行了讨论。随着人们对非线性系统辨识问题研究的日益深入,更为一般的普适性非线性模型的辨识问题就显得日益重要。常用的非线性系统描述方法有微分(或差分)法、泛函级数法、NARMAX 模型法及分块系统法等。一些学者已经对非线性系统辨识方法进行了某方面的综述。例如,1965 年Arnold 和Stark 讨论了正交展开方法在非线性系统辨识中的应用,1968 年Aleksandrovskii 和Deich及1977 年Hung 和Stark综述了核辨识算法,1989 年Titterington 和Kitsos总结了非线性试验设计的最新发展,并列举了十五个在化工领域中常遇到的非线性模型。 本文对近年来新的非线性系统的辨识方法作以简单的综述。
云南大学信息学院学生实验报告 课程名称:现代控制理论 实验题目:预测控制 小组成员:李博(12018000748) 金蒋彪(12018000747) 专业:2018级检测技术与自动化专业
1、实验目的 (3) 2、实验原理 (3) 2.1、预测控制特点 (3) 2.2、预测控制模型 (4) 2.3、在线滚动优化 (5) 2.4、反馈校正 (5) 2.5、预测控制分类 (6) 2.6、动态矩阵控制 (7) 3、MATLAB仿真实现 (9) 3.1、对比预测控制与PID控制效果 (9) 3.2、P的变化对控制效果的影响 (12) 3.3、M的变化对控制效果的影响 (13) 3.4、模型失配与未失配时的控制效果对比 (14) 4、总结 (15) 5、附录 (16) 5.1、预测控制与PID控制对比仿真代码 (16) 5.1.1、预测控制代码 (16) 5.1.2、PID控制代码 (17) 5.2、不同P值对比控制效果代码 (19) 5.3、不同M值对比控制效果代码 (20) 5.4、模型失配与未失配对比代码 (20)
1、实验目的 (1)、通过对预测控制原理的学习,掌握预测控制的知识点。 (2)、通过对动态矩阵控制(DMC)的MATLAB仿真,发现其对直接处理具有纯滞后、大惯性的对象,有良好的跟踪性和较强的鲁棒性,输入已 知的控制模型,通过对参数的选择,来获得较好的控制效果。 (3)、了解matlab编程。 2、实验原理 模型预测控制(Model Predictive Control,MPC)是20世纪70年代提出的一种计算机控制算法,最早应用于工业过程控制领域。预测控制的优点是对数学模型要求不高,能直接处理具有纯滞后的过程,具有良好的跟踪性能和较强的抗干扰能力,对模型误差具有较强的鲁棒性。因此,预测控制目前已在多个行业得以应用,如炼油、石化、造纸、冶金、汽车制造、航空和食品加工等,尤其是在复杂工业过程中得到了广泛的应用。在分类上,模型预测控制(MPC)属于先进过程控制,其基本出发点与传统PID控制不同。传统PID控制,是根据过程当前的和过去的输出测量值与设定值之间的偏差来确定当前的控制输入,以达到所要求的性能指标。而预测控制不但利用当前时刻的和过去时刻的偏差值,而且还利用预测模型来预估过程未来的偏差值,以滚动优化确定当前的最优输入策略。因此,从基本思想看,预测控制优于PID控制。 2.1、预测控制特点 首先,对于复杂的工业对象。由于辨识其最小化模型要花费很大的代价,往往给基于传递函数或状态方程的控制算法带来困难,多变量高维度复杂系统难以建立精确的数学模型工业过程的结构、参数以及环境具有不确定性、时变性、非线性、强耦合,最优控制难以实现。而预测控制所需要的模型只强调其预测功能,不苛求其结构形式,从而为系统建模带来了方便。在许多场合下,只需测定对象的阶跃或脉冲响应,便可直接得到预测模型,而不必进一步导出其传递函数或状
基于最小二乘模型的Bayes 参数辨识方法 王晓侃1,冯冬青2 1 郑州大学电气工程学院,郑州(450001) 2 郑州大学信息控制研究所,郑州(450001) E-mail :wxkbbg@https://www.doczj.com/doc/9d4121260.html, 摘 要:从辨识定义出发,首先介绍了Bayes 基本原理及其两种常用的方法,接着重点介绍了基于最小二乘模型的Bayes 参数辨识,最后以实例用MATLAB 进行仿真,得出理想的辨识结果。 关键词:辨识定义;Bayes 基本原理;Bayes 参数辨识 中国图书分类号:TP273+.1 文献标识码:A 0 概述 系统辨识是建模的一种方法。不同的学科领域,对应着不同的数学模型,从某种意义上讲,不同学科的发展过程就是建立它的数学模型的过程。建立数学模型有两种方法:即解析法和系统辨识。L. A. Zadehll 于1962年曾对”辨识”给出定义[1]:系统辨识是在对输入和输出观测的基础上,在指定的一类系统中,确定一个与被识别的系统等价的系统。一般系统输出y(n)通常用系统过去输出y(n-m)和现在输入u(n)及过去输入u(n-m)的函数描述 y(n)=f(y(n-1),y(n-2),...,y(n-m y ), u(n),u(n-1),... ,u(n-m u ))=f(x(n),n) x(n)=[y(n-1),y(n-2),...y(n-m y ), u(n),u(n-1),...,u(n-m u )]’ 这里f(,)为未知函数关系,一般情况为泛函数,可以是线性函数或非线性函数,分别对应于线性或非线性系统,通常这个函数未知,但是局部输入输出数据可以测出,系统辨识的任务就是根据这部分信息寻找确定函数或确定系统来逼近这个未知函数。但实际上我们不可能找到一个与实际系统完全等价的模型。从实用的角度来看,系统辨识就是从一组模型中选择一个模型,按照某种准则,使之能最好地拟合由系统的输入输出观测数据体现出的实际系统的动态或静态特性。接下来本文就以最小二乘法为基础的Bayes 辨识方法为例进行分析介绍并加以仿真[4]。 1 Bayes 基本原理 Bayes 辨识方法的基本思想是把所要估计的参数看做随机变量,然后设法通过观测与该参数有关联的其他变量,以此来推断这个参数。 设μ是描述某一动态系统的模型,θ是模型μ的参数,它会反映在该动态系统的输入输出观测值中。如果系统的输出变量z(k)在参数θ及其历史纪录(1) k D ?条件下的概率密度函 数是已知的,记作p(z(k)|θ,(1) k D ?),其中(1) k D ?表示(k-1)时刻以前的输入输出数据集 合,那么根据Bayes 的观点参数θ的估计问题可以看成是把参数θ当作具有某种先验概率密 度p (θ,(1) k D ?)的随机变量,如果输入u(k)是确定的变量,则利用Bayes 公式,把参数θ 的后验概率密度函数表示成[2] p (θ,k D )= p (θ|z (k ),u(k ), (1) k D ?)=p (θ|z (k ),(1) k D ?) = (k-1) (k-1) p(z(k)/,D )p(/D ) (k-1)(k-1)p(z(k)/,D )p(/D )d θθθθθ∞∫?∞ (1) 在式(1)中,参数θ的先验概率密度函数p(θ|(1) k D ?)及数据的条件概率密度函数p(z(k)|θ,
Chapter 10 Numerical Optimal Control of Nonlinear Systems In this chapter,we present methods for the numerical solution of the constrained ?nite horizon nonlinear optimal control problems which occurs in each iterate of the NMPC procedure.To this end,we ?rst discuss standard discretization techniques to obtain a nonlinear optimization problem in standard form.Utilizing this form,we outline basic versions of the two most common solution methods for such problems,that is Sequential Quadratic Programming (SQP)and Interior Point Methods (IPM).Furthermore,we investigate interactions between the differential equation solver,the discretization technique and the optimization method and present several NMPC speci?c details concerning the warm start of the optimization routine.Finally,we discuss NMPC variants relying on inexact solutions of the ?nite horizon optimal control problem. 10.1Discretization of the NMPC Problem The most general NMPC problem formulation is given in Algorithm 3.11and will be the basis for this chapter.In Step (2)of Algorithm 3.11we need to solve the optimal control problem minimize J N n,x 0,u(·) :=N ?1 k =0ωN ?k n +k,x u (k,x 0),u(k) +F J n +N,x u (N,x 0) with respect to u(·)∈U N X 0(n,x 0), subject to x u (0,x 0)=x 0,x u (k +1,x 0)=f x u (k,x 0),u(k) .(OCP n N ,e ) We will particularly emphasize the case in which the discrete time system (2.1)is induced by a sampled data continuous time control systems ˙x(t)=f c x(t),v(t) ,(2.6)L.Grüne,J.Pannek,Nonlinear Model Predictive Control , Communications and Control Engineering, DOI 10.1007/978-0-85729-501-9_10,?Springer-Verlag London Limited 2011275
EViews非线性模型参数估计方法步骤 1.新建EViews工作区,并将时间序列X、P1和P0导入到工作区; 2.设定参数的初始值全部为1,其方法是在工作区中其输入下列命令 并按回车键 param c(1) 1 c(2) 1 c(3) 1 c(4) 1 3.估计非线性模型参数,其方法是在工作区中其输入下列命令并按 回车键 nls q=exp(c(1))*x^c(2)*p1^c(3)*p0^c(4) 4.得到结果见table01(91页表3. 5.4结果)(案例一结束) Dependent Variable: Q Method: Least Squares Date: 03/29/15 Time: 21:44 Sample: 1985 2006 Included observations: 22 Convergence achieved after 9 iterations Q=EXP(C(1))*X^C(2)*P1^C(3)*P0^C(4) Coefficient Std. Error t-Statistic Prob. C(1) 5.567708 0.083537 66.64931 0.0000 C(2) 0.555715 0.029067 19.11874 0.0000 C(3) -0.190154 0.143823 -1.322146 0.2027 C(4) -0.394861 0.159291 -2.478866 0.0233 R-squared 0.983631 Mean dependent var 1830.000 Adjusted R-squared 0.980903 S.D. dependent var 365.1392 S.E. of regression 50.45954 Akaike info criterion 10.84319 Sum squared resid 45830.98 Schwarz criterion 11.04156 Log likelihood -115.2751 Hannan-Quinn criter. 10.88992 Durbin-Watson stat 0.672163 (92页表3.5.5结果)(案例二过程) 5.新建EViews工作区,并将时间序列X、P1和P0导入到工作区;
神经网络模型预测控制器 摘要:本文将神经网络控制器应用于受限非线性系统的优化模型预测控制中,控制规则用一个神经网络函数逼近器来表示,该网络是通过最小化一个与控制相关的代价函数来训练的。本文提出的方法可以用于构造任意结构的控制器,如减速优化控制器和分散控制器。 关键字:模型预测控制、神经网络、非线性控制 1.介绍 由于非线性控制问题的复杂性,通常用逼近方法来获得近似解。在本文中,提出了一种广泛应用的方法即模型预测控制(MPC),这可用于解决在线优化问题,另一种方法是函数逼近器,如人工神经网络,这可用于离线的优化控制规则。 在模型预测控制中,控制信号取决于在每个采样时刻时的想要在线最小化的代价函数,它已经广泛地应用于受限的多变量系统和非线性过程等工业控制中[3,11,22]。MPC方法一个潜在的弱点是优化问题必须能严格地按要求推算,尤其是在非线性系统中。模型预测控制已经广泛地应用于线性MPC问题中[5],但为了减小在线计算时的计算量,该部分的计算为离线。一个非常强大的函数逼近器为神经网络,它能很好地用于表示非线性模型或控制器,如文献[4,13,14]。基于模型跟踪控制的方法已经普遍地应用在神经网络控制,这种方法的一个局限性是它不适合于不稳定地逆系统,基此本文研究了基于优化控制技术的方法。 许多基于神经网络的方法已经提出了应用在优化控制问题方面,该优化控制的目标是最小化一个与控制相关的代价函数。一个方法是用一个神经网络来逼近与优化控制问题相关联的动态程式方程的解[6]。一个更直接地方法是模仿MPC方法,用通过最小化预测代价函数来训练神经网络控制器。为了达到精确的MPC技术,用神经网络来逼近模型预测控制策略,且通过离线计算[1,7.9,19]。用一个交替且更直接的方法即直接最小化代价函数训练网络控制器代替通过训练一个神经网络来逼近一个优化模型预测控制策略。这种方法目前已有许多版本,Parisini[20]和Zoppoli[24]等人研究了随机优化控制问题,其中控制器作为神经网络逼近器的输入输出的一个函数。Seong和Widrow[23]研究了一个初始状态为随机分配的优化控制问题,控制器为反馈状态,用一个神经网络来表示。在以上的研究中,应用了一个随机逼近器算法来训练网络。Al-dajani[2]和Nayeri等人[15]提出了一种相似的方法,即用最速下降法来训练神经网络控制器。 在许多应用中,设计一个控制器都涉及到一个特殊的结构。对于复杂的系统如减速控制器或分散控制系统,都需要许多输入与输出。在模型预测控制中,模型是用于预测系统未来的运动轨迹,优化控制信号是系统模型的系统的函数。因此,模型预测控制不能用于定结构控制问题。不同的是,基于神经网络函数逼近器的控制器可以应用于优化定结构控制问题。 在本文中,主要研究的是应用于非线性优化控制问题的结构受限的MPC类型[20,2,24,23,15]。控制规则用神经网络逼近器表示,最小化一个与控制相关的代价函数来离线训练神经网络。通过将神经网络控制的输入适当特殊化来完成优化低阶控制器的设计,分散和其它定结构神经网络控制器是通过对网络结构加入合适的限制构成的。通过一个数据例子来评价神经网络控制器的性能并与优化模型预测控制器进行比较。 2.问题表述 考虑一个离散非线性控制系统: 其中为控制器的输出,为输入,为状态矢量。控制
上海交通大学 硕士学位论文 Bouc-Wen滞回模型的参数辨识及其在电梯振动建模中的应用 姓名:周传勇 申请学位级别:硕士 专业:机械设计及理论 指导教师:李鸿光 20080201
Bouc-Wen滞回模型的参数辨识 及其在电梯振动建模中的应用 摘 要 电梯导靴是连接轿箱系统与导轨的装置,它能起到导向和隔振减振的作用。同时,在电梯的运行过程中它又将导轨由于制造或安装所造成的表面不平顺度传递给轿箱系统,从而引起轿箱系统的水平振动。国内外学者在电梯水平振动的建模和分析中,往往把导靴视为线性弹簧-阻尼元件来建模而忽略了非线性因素。事实上导靴与导轨之间存在非线性的迟滞摩擦力,本文通过实验的方法,采用Bouc-Wen 滞回模型来建立导靴-导轨非线性摩擦力模型。 Bouc-Wen滞回模型因其微分形式的非线性表达式而使得其参数辨识存在较大的困难,本文利用模型中部分参数的不敏感性,通过数学变换将非线性参数辨识问题转化为线性参数辨识问题,从而使得问题大大简化,参数辨识的效果也能满足要求。 基于以上导靴-导轨间摩擦力模型,本文进而建立了轿箱-导轨耦合水平振动动力学模型,该模型将轿箱系统等效为2自由度的平面运动刚体,将导靴等效为质量-弹簧-阻尼单元,同时考虑了导靴-导轨间的非线性摩擦力,以及导靴靴衬与导轨间接触的不连续性等。 在建立了轿箱-导轨耦合水平振动动力学模型后,利用Matlab/Simulink,建立了相应的仿真模型,开展了几种典型导轨不
平顺度激励(弯曲、失调和台阶)下的仿真分析。研究结果表明,这些分析对于电梯结构优化设计和动力学建模与分析有理论指导意义。 关键词:迟滞,参数辨识,非线性,动力学建模,系统仿真
2012-11-14 11:43 by:Abaqus教程来源:广州有道有限元 Abaqus显式非线性动态分析——ABAQUS/Explicit适用的问题类型 显式动态程序对于求解广泛的、各种各样的非线性固体和结构力学问题是一种非常有效的工具。它常常对隐式求解器是一个补充,如ABAQUS/Standard;从用 户的观点来看,显式与隐式方法的区别在于: ?显式方法需要很小的时间增量步,它仅依赖于模型的最高固有频率,而与载荷的类型和持续的时间无关。通常的模拟需要取10,000至1,000,000个增量步,每个增量步的计算成本相对较低。 ?隐式方法对时间增量步的大小没有内在的限制;增量的大小通常取决于精度和收敛情况。典型的隐式模拟所采用的增量步数目要比显式模拟小几个数量级。然而,由于在每个增量步中必须求解一套全域的方程组,所以对于每一增量步的成本,隐式方法远高于显式方法。 了解两个程序的这些特性,能够帮助你确定哪一种方法是更适合于你的问题。 ABAQUS/Explicit适用的问题类型 在讨论显式动态程序如何工作之前,有必要了解ABAQUS/Explicit适合于求解哪些类问题。贯穿这本手册,我们已经提供了贴切的例题,它们一般是应用ABAQUS/Explicit求解的如下类型问题: 高速动力学(high-speed dynamic)事件 最初发展显式动力学方法是为了分析那些用隐式方法(如ABAQUS/Standard)分析起来可能极端费时的高速动力学事件。作为此类模拟的例子,在第10章“材料”中分析了一块钢板在短时爆炸载荷下的响应。因为迅速施加的巨大载荷,结构的响应变化的非常快。对于捕获动力响应,精确地跟踪板内的应力波是非常重要的。由于应力波与系统的最高阶频率相关联,因此为了得到精确解答需要许多小的时间增量。 复杂的接触(contact)问题 应用显式动力学方法建立接触条件的公式要比应用隐式方法容易得多。结论是ABAQUS/Explicit能够比较容易地分析包括许多独立物体相互作用的复杂接触问题。ABAQUS/Explicit是特别适合于分析受冲击载荷并随后在结构内部发生复杂相互接触作用的结构的瞬间动态响应问题。在第12章“接触” 中展示的电路板跌落试验就是这类问题的一个例子。在这个例子中,一块插入在泡沫封装中的电路板从1m的高度跌落到地板上。这个问题包括封装与地板之间的冲击,以及在电路板和封装之间的接触条件的迅速变化。 复杂的后屈曲(postbuckling)问题