文献综述
题目:智能算法的TSP算法求解文献综述学生姓名:
系别:数学物理系
专业年级: 2012级信息与计算科学
学号: 2012070
2015年 6 月 30日
智能算法的TSP算法求解
1 简介
TSP问题为组合优化中的经典问题,已经证明为一NP完全问题,即其最坏情况下的时间复杂性随着问题规模的扩大,按指数方式增长,到目前为止不能找到一个多项式时间的有效算法。
遗传算法是一种进化算法,其基本原理是仿效生物界中的“物竞天择,适者生存”的演化法则。遗传算法把问题参数编码为染色体,再按照所选择的适应度函数,利用迭代的方式进行选择、交叉、变异以及进化逆转等运算对个体进行筛选和进化,使适应值大的个体被保留,适应值小的个体被淘汰,新的群体继承了上一代的信息,又优于上一代,这样反复循环,直至满足条件,最后留下来的个体集中分布在最优解的周围,筛选出最优个体作为问题的解。
2 基于遗传算法TSP算法
2.1 基于遗传算法的TSP算法总体框架
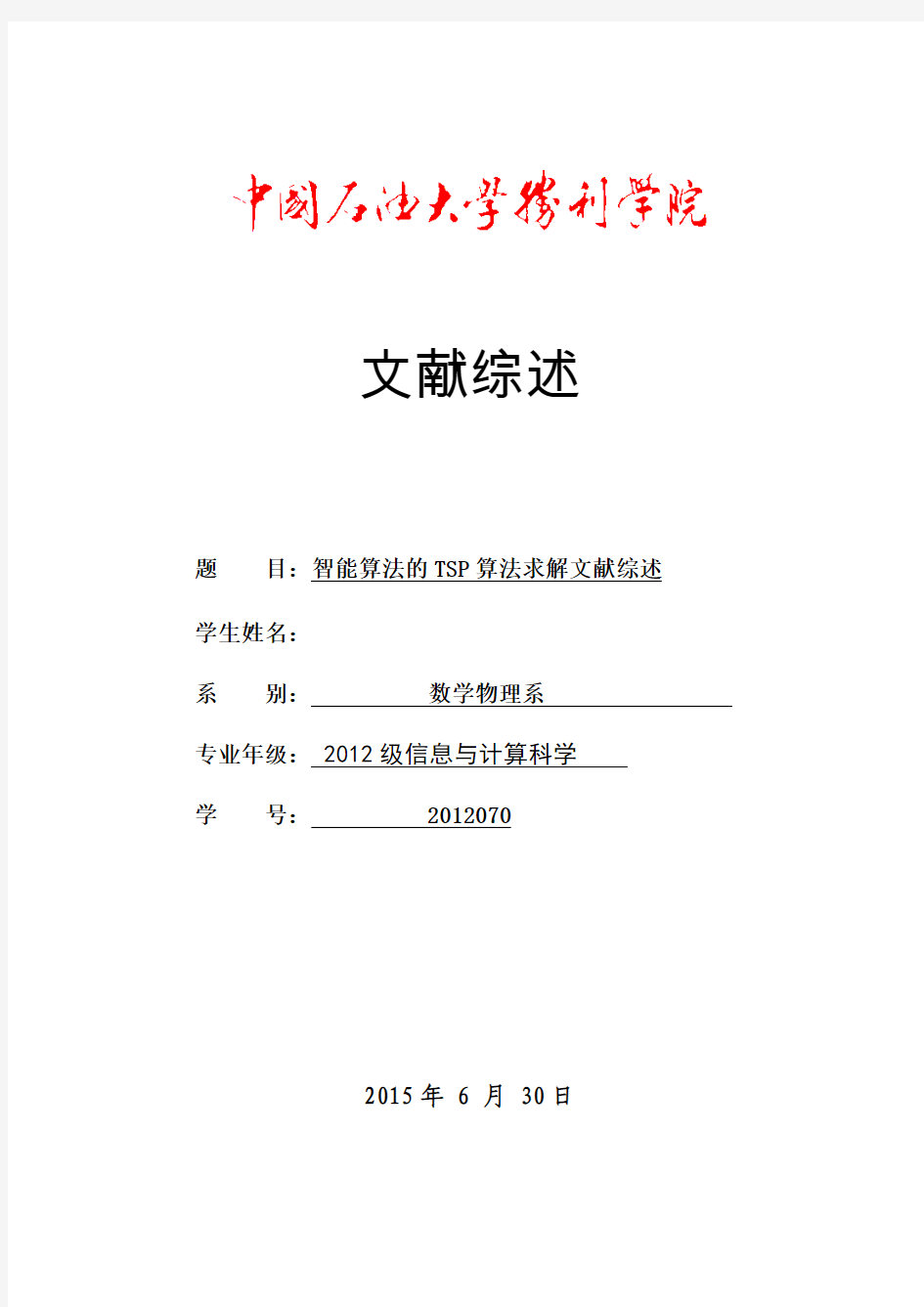
TSP问题的遗传算法包括编码设计、种群初始化、适应度函数选择、终止条件设定、选择操作设定、交叉操作设定以及变异操作设定和进化逆转操作.为简化TSP问题的求解,假设每个城市和其它任意一个城市之间都以欧氏距离,直接相连.遗传算法TSP问题的流程图如图1所示。.
N
2.2 算法的详细设计
2.2.1 解空间的表示方式
遗传算法对解空间的表示大多采用二进制编码形式,但是二进制编码方式不适合TSP 问题的解的表示,因为它要求特殊的修补算子来修复变化算子所产生的非法路径(即不可行路径).给出城市编号,用十进制数编码来表示解更合适,例如:近邻表示、次序表示和路径表示等等.这里采用了最简单的路径表示法.它是最自然、最接近人类思维的表示法。
2.2.2 种群初始化
种群的规模选择应适当,盲目的增大种群规模不能使算法得到改进,反而大大增加了计算的开销。
2.2.3 适应度函数
适应度表明个体或解的优劣性,不同的问题,适应度函数的定义方式也不同,优化的目标就是选择适应度函数值尽可能大的染色体,适应度函数值越大的染色体越优质,反之越劣质.求得种群中所有个体的适应值后,将适应值最大的个体保存起来,到演化完毕时,这个个体就是最后要求的最优解。
3.2.4 选择操作
选择操作的目的是为了从当前群体中以一定的概率选择优良个体到新群体中,将选择算子作用于群体,从而使优化的个体有机会直接遗传到下一代或通过配对交叉产生新的个体再遗传到下一代;个体被选中的概率与适应度值有关,适应度值越大,被选中的概率也就越大,而适应度值越大的染色体越优质.本案例选择轮盘赌法,即基于适应度比例的选择策略,个体i 被选中的概率为:
1i
i N j
j F p F
==∑ 其中,i F 为个体i 的适应度值;N 为种群个体数目。
3.2.5 交叉操作
交叉操作是遗传算法中最主要的遗传操作,通过交叉操作可以得到新一代个体,新个体结合了其父辈个体的特性,交叉体现了信息交换的思想.利用不同映射杂交,确定交叉操作的父代,将父代样本两两分组,每组重复以下过程:
(1)产生两个[1,10]区间的随机整数1r和2r,确定两个位置,对两个位置的中
间数据进行交叉,如14
r=,
27
r=
5 1 2 4 3
6
7 9
8 10
10 6 2 3 5 8 9 4 1 7
交叉为:
* 1 2 3 5 8 9 * * 10
10 * 2 4 3 6 7 * 1 *
(2)交叉后,对同一个个体中有重复的城市编号,不重复的数字保留,有冲突的数字(带*的位置)采用部分映射的方法消除冲突,即利用中间段的对应关系进行映射.结果为:
4 1 2 3
5 8 9
6
7 10
10 5 2 4 3 6 7 8 1 9
交叉是希望不同的个体在产生下一代时,能够结合各自的优势基因,产生更好质量的下一代。
3.2.6 变异操作
变异可以看作是外界对种群的影响.变异是为了引入新的因素,希望个体在外界的作用下,能够实现自我优化,生好的基因.将变异算子作用于群体。即是对群体中的个体串的某些基因位置上的基因值作变动。变异算子采用了简单的倒序变换,由于这种变异算子仍能保持个体中的路径片段,即倒序前后这个切割段的路径是一样的,只是两端点与整个路径的连接颠倒了,这使得变异不是漫无边际,而是有所取舍的。这种简单反序可以保证后代仍然是一条合法途径。
3.2.7进化逆转操作
为了改善遗传算法的局部搜索能力,在选择、交叉、变异之后引进连续多次的进化逆转操作,这里的“进化”是指逆转算子的单方向性,即只有经逆转后,适应度值有所提高的才接受下来,否则逆转无效。
对每个个体进行交叉变异,然后代入适应度函数进行评估,x选择出适应值大的个体进行下一代交叉和变异以及进化逆转操作循环操作:判断是否满足设定
的最大遗传代数MAXGEN,不满足则跳入适应度值计算;否则结束遗传操作。4遗传算法优缺点
4.1遗传算法优点:
(1)对可行解表示的广泛性,具有群体搜索特性,不需要辅助信息;
(4)内在启发式随机搜索特性;
(5)遗传算法在搜索过程中不容易陷入局部最优,即使在所定义的适应度函数是不连续的,非规则的或有噪音的情况下,也能以很大的概率找到全局最优解;(6)遗传算法具有固有的并行性和并行计算能力;
(7)遗传算法具有可扩展性,易于同别的技术混合。
4.2遗传算法缺点:
(1)编码不规则或编码存在表示的不规则性;
(2)单一的遗传算法编码不能全面的将优化问题的约束表示出来;
(3)遗传算法通常的效率比比其他传统的优化方法低,容易出现过早收敛;(4)遗传算法对算法的精度,可信度,计算复杂性等方面,还没有有效的定量分析方法。
6总结
遗传算法利用自然界的“物竞天择、适者生存”的演化法则,把问题参数编码为染色体,再利用迭代的方式进行选择、交叉以及变异等运算来交换种群中染色体的信息,最终生成符合优化目标的染色体。实践证明,遗传算法在搜索优秀解的过程中模拟生物遗传,实现优中选优的过程,在解空间中快速收敛到优秀解。遗传算法对于解决TSP问题等组合优化问题具有较好的寻优性能。
参考文献
[1]储理才.基于MATLAB的遗传算法程序设计及TSP问题求解[J].集美大学学报:
2001,6(01):14-19.
[2]代桂平,王勇,侯亚荣.基于遗传算法的TSP问题求解算法及其系统[J].微计算机
信息,2010(04):15-16,19.
[3]张春霞,王蕊.基于遗传算法求解TSP 问题的算法设计[J].安阳工学院学
报.2007.
[4]李飞,白艳萍.用遗传算法求解旅行商问题[J].中北大学学报.2007.
Artificial Intelligence and Robotics Research 人工智能与机器人研究, 2015, 4(3), 17-22 Published Online August 2015 in Hans. https://www.doczj.com/doc/9c5642402.html,/journal/airr https://www.doczj.com/doc/9c5642402.html,/10.12677/airr.2015.43003 A Survey on Object Tracking Jialong Xu Aviation Military Affairs Deputy Office of PLA Navy in Nanjing Zone, Nanjing Jiangsu Email: pugongying_0532@https://www.doczj.com/doc/9c5642402.html, Received: Aug. 1st, 2015; accepted: Aug. 17th, 2015; published: Aug. 20th, 2015 Copyright ? 2015 by author and Hans Publishers Inc. This work is licensed under the Creative Commons Attribution International License (CC BY). https://www.doczj.com/doc/9c5642402.html,/licenses/by/4.0/ Abstract Object tracking is a process to locate an interested object in a series of image, so as to reconstruct the moving object’s track. This paper presents a summary of related works and analyzes the cha-racteristics of the algorithm. At last, some future directions are suggested. Keywords Object Tracking, Track Alignment, Object Detection 目标跟踪相关研究综述 徐佳龙 海军驻南京地区航空军事代表室,江苏南京 Email: pugongying_0532@https://www.doczj.com/doc/9c5642402.html, 收稿日期:2015年8月1日;录用日期:2015年8月17日;发布日期:2015年8月20日 摘要 目标跟踪就是在视频序列的每幅图像中找到所感兴趣的运动目标的位置,建立起运动目标在各幅图像中的联系。本文分类总结了目标跟踪的相关工作,并进行了分析和展望。
智能小车设计文献综述 摘要:随着电子工业的发展,智能技术广泛运用于各种领域,智能小车不仅在工业智能化上得到广泛的应用,而且运用于智能家居中的产品也越来越受到人们的青睐。国外智能车辆的研究历史较长。相比于国外,我国开展智能车辆技术方面的研究起步较晚,在智能车辆技术方面的研究总体上落后于发达国家但是也取得了一系列的成果。随着人工智能技术、计算机技术、自动控制技术的迅速发展,智能控制将有广阔的发展空间。本设计的智能小车利用红外对管检测黑线与障碍物,并以单片机为控制芯片控制电动小汽车的速度及转向,从而实现自动循迹避障的功能。并对智能小车研究现状以及未来的应用与发展前景做一个全方面的介绍。 关键词:智能技术,自动循迹,避障 1前言 随着电子技术、计算机技术和制造技术的飞速发展,数码相机、DVD、洗衣机、汽车等消费类产品越来越呈现光机电一体化、智能化、小型化等趋势。智能化作为现代社会的新产物,是以后的发展方向,他可以按照预先设定的模式在一个特定的环境里自动的运作,无需人为管理,便可以完成预期所要达到的或是更高的目标。智能小车,也称轮式机器人,是一种以汽车电子为背景,涵盖控制、模式识别、传感技术、电子、电气、计算机、机械等多科学的科技创意性设计,一般主要路径识别、速度采集、角度控制及车速控制等模块组成。一般而言,智能车系统要求小车在白色的场地上,通过控制小车的转向角和车速,使小车能自动地沿着一条任意给定的 黑色带状引导线行驶[1]。智能小车运用直流电机对小车进行速度和正反方向的运动 控制,运用直流电机对小车进行速度和正反方向的运动控制,通过单片机来控制直流电机的工作,从而实现对整个小车系统的运动控制。 2智能小车的发展历史、国内外研究现状 2.1国外研究现状 国外智能车辆的研究历史较长,始于上世纪50年代。它的发展历程大体可以分成三个阶段[2][3][4]: 第一阶段,20世纪50年代是智能车辆研究的初始阶段。1954年美国Barrett Electronics 公司研究开发了世界上第一台自主引导车系统AGVS(Automated Guided Vehicle System)。该系统只是一个运行在固定线路上的拖车式运货平台,但它却具有了智能车辆最基本得特征即无人驾驶。早期研制AGVS的目的是为了提高仓库运输的自动化水平,应用领域仅局限于仓库内的物品运输。随着计算机的应用和传感
现代智能优化算法课程群智能优化算法综述 学生姓名: 学号: 班级: 2014年6月22日
摘要 工程技术与科学研究中的最优化求解问题十分普遍,在求解过程中,人们创造与发现了许多优秀实用的算法。群智能算法是一种新兴的演化计算技术,已成为越来越多研究者的关注焦点,智能优化算法具有很多优点,如操作简单、收敛速度快、全局收敛性好等。群智能优化是智能优化的一个重要分支,它与人工生命,特别是进化策略以及遗传算法有着极为特殊的联系。群智能优化通过模拟社会性昆虫的各种群体行为,利用群体中个体之间的信息交互和合作实现寻优。本文综述群智能优化算法的原理、主要群智能算法介绍、应用研究及其发展前景。 关键词:群智能;最优化;算法
目录 摘要 (1) 1 概述 (3) 2 定义及原理 (3) 2.1 定义 (3) 2.2 群集智能算法原理 (4) 3 主要群智能算法 (4) 3.1 蚁群算法 (4) 3.2 粒子群算法 (5) 3.3 其他算法 (6) 4 应用研究 (7) 5 发展前景 (7) 6 总结 (8) 参考文献 (9)
1 概述 优化是人们长久以来不断研究与探讨的一个充满活力与挑战的领域。很多实际优化问题往往存 在着难解性,传统的优化方法如牛顿法、共扼梯度法、模式搜索法、单纯形法等己难以满足人们需求。 因此设计高效的优化算法成为众多科研工作者的研究目标。随着人类对生物启发式计算的研究, 一些社会性动物( 如蚁群、蜂群、鸟群) 的自组织行为引起了科学家的广泛关注。这些社会性动物在漫长的进化过程中形成了一个共同的特点: 个体的行为都很简单, 但当它们一起协同工作时, 却能够“突现”出非常复杂的行为特征。基于此,人们设计了许多优化算法,例如蚁群算法、粒子群优化算法、混合蛙跳算法、人工鱼群算法,并在诸多领域得到了成功应用。目前, 群智能理论研究领域主要有两种算法: 蚁群算法(Ant Colony Optimization, ACO) 和粒子群优化算法(ParticleSwarm Optimization, PSO)。 2 定义及原理 2.1 定义 群集智能优化算法源于对自然界的生物进化过程或觅食行为的模拟。它将搜索和优化过程模拟成个体的进化或觅食过程,用搜索空间中的点模拟自然界中的个体;将求解问题的目标函数度量成个体对环境的适应能力;将个体的优胜劣汰过程或觅食过程类比为搜索和优化过程中用好的可行解取代较差可行解的迭代过程。从而,形成了一种以“生成+检验”特征的迭代搜索算法,是一种求解极值问题的自适应人工智能技术。各类优化算法实质上都是建立问题的目标函数,求目标函数的最优解,因而实际工程优化问题均可转化为函数优化问题。其表达形式如下: 求: ,,2,1,0)(..), (min , ,,2,1,),,,(21Lm j X g t s X f n L i x L x x X i T n i =≤== 。Ω∈X 其中, i X 为设计变量;)(X f 为被优化的目标函数;0)(≤X g j 为约束函数;Ω为设计变量的 可行域。
计算机图形学 课 程 设 计 题目名称:汽车车牌识别系统的设计综述班级: 学号: 学生姓名:
汽车车牌识别系统的设计综述 摘要 车牌的自动识别是计算机视觉、图像处理与模式识别技术在智能交通领域应用的重要研究课题之一, 是实现交通管理智能化的重要环节, 主要包括车牌识别、字符预处理和特征提取三个关键环节。 车牌识别包括车牌定位、灰度(或彩色)图像二值化、字符切分及字符识别等。 图像预处理包括图像灰度变换、图像增强、图像二值化、梯度锐化、噪声去除、倾斜度调整、车牌边框去除、字符分割、尺寸标准归一化、紧缩重排。 特征提取本文采用逐象素特征提取法来对支付进行识别。 理论上,本系统可以对中国大陆普通汽车车牌的字符进行识别。 关键词:车牌识别,图像预处理,特征提取
引言 1.1 问题概述 随着我国汽车产业的飞速发展,大量在公共场合的汽车需要得到监管,为了更好地进行管理,必须对车辆进行一种确认,而车牌识别就是其中最有效的确认方法,汽车车牌识别VLPR 是Vehicle License Plate Recognition 的简称,他是智能交通系统(Intelligent Transportation Systems,ITS)的一个重要组成部分。车牌识别技术的运用使得“大输入小输出”成为了可能——输入一幅很大存储量的图像,输出时仅仅是很小存储量的数字,这必然使得其在大量存储和管理数据库相连等方面有无可替代的优越性。车牌识别技术在高速公路收费站、路口监测(电子警察)、大型停车场等场所具有广阔的发展前景。 1.2 目的和意义 车牌识别LPR[1]是智能交通系统(ITS)的一个重要组成部分。在社会生活,治安管理等方面有很大的作用。车牌识别技术的运用使得“大输入小输出”成为了可能——输入一幅很大存储量的图像,输出时仅仅是很小存储量的数字,这必然使得其在大量存储和管理数据库相连等方面有无可替代的优越性。 由于光照、气候引起的车牌图像上字符光照不均,车牌本身污损造成的字符笔画不清和字符间粘连,汽车行驶速度较快,使拍摄出的车牌字符产生变形、模糊不清,因此图像需要增强。另外又由于拍摄角度及拍摄点的高度、路面的倾斜等情况造成了车牌图像的倾斜,从而需要对车牌进行校正。另外字符的识别也是一个重点问题。 1.3 思路和方法 借助数字图像处理和模式识别技术,我们对车牌图像依次进行以下处理:彩色的256 色的BMP 图进行灰度转换->图像增强->图像二值化->梯度锐化(Roberts 梯度算子)->离散点噪声去除->倾斜度调整->边框切除->字符切割->字符尺寸归一化->字符紧缩重排->神经网络的字符识别,最后得出车牌字符。
文献综述 一般使用的计算机的硬件结构主要反映数值计算的需要,而计算机上的非数值处理的对象基本上是字符串数据,因此在处理字符串数据时比处理整数和浮点数要复杂的很多。随着程序语言将程序的发展,字符串的处理也有了越来越多的研究。子串的定位炒作通常称为串的模式匹配,是各种处理系统中最重要的操作之一。串匹配问题是指从给定的字符序列中找出一个或多个具有某种属性的模式序列,而字符串匹配指的便是从给定的字符序列中找出一个或若干个给定的字符串。字符串匹配算法是一个基础算法,它的解决以及在这个过程中产生的方法对计算机的其他问题都产生了巨大的影响。在我们日常使用计算机的过程中,使用字符串匹配技术的例子十分普遍,例如:入侵检测、病毒检测、信息检索、信息过滤、计算生物学等等都包含了字符串匹配技术。 在字符串匹配技术被广泛应用的同时,众多的科技人员也对其进行了深入的研究,字符串匹配问题现在已经发展成为一门相对独立的科学——字符串学(Stingology)[1][2][3]。字符串匹配技术最先被应用于图书文献目录摘要的查询系统和构建数据的全文检索系统。而后,随着网络安全技术和生物技术的日益发展,在网络安全和生物计算等领域中字符串匹配技术又获得了新的发展空间。 随着网络速度和流量的日益增加,基于网络的入侵检测[4][5]系统面临着严峻的挑战,它的处理、分析速度越来越难以跟上网络流量增加速度,从而极易导致数据包的丢失。解决数据包丢失等问题,提高处理速度是关键。另外对于基于误用的入侵检测系统而言,检测过程中最费时的部分便是入侵特征匹配。 目前,信息资源的高速膨胀已经成为一个全球普遍关注的现象。加利福尼亚大学伯克利分校研究人员发现,仅从1999年至2002年全球新产生的信息量就翻了一番。伴随着信息膨胀,信息的良莠不齐现象也是一个严重困扰人们的问题。大量反动、黄色信息以及国家机密在网络上蔓延和传播,给国建安全和社会稳定造成了严重的威胁,如何对这些不良信息进行网络监控是我们面临的一个重要问题。在信息过滤时,特别是在主干网络上进行过滤与检索,对字符串匹配的实时性要求极高,字符串匹配性能的优劣直接影响了过滤与检索系统的性能。 随着生命科学的发展,人们对生命物质的微观结构也有了越来越清晰的认识。目前,人类基因组序列的绘制工作已完成,Prosite等大型蛋白质重要样本数
机器视觉的辅助驾驶系统的视频中行人 实时检测识别研究文献综述 1机器视觉发展 国外机器视觉发展的起点难以准确考证,其大致的发展历程是:20世纪50年代提出机器视觉概念,20世纪70年代真正开始发展,20世纪80年代进入发展正轨,20世纪90年代发展趋于成熟,20世纪90年代后高速发展。在机器视觉发展的历程中,有3个明显的标志点,一是机器视觉最先的应用来自“机器人”的研制,也就是说,机器视觉首先是在机器人的研究中发展起来的;二是20世纪70年代CCD图像传感器的出现,CCD摄像机替代硅靶摄像是机器视觉发展历程中的一个重要转折点;三是20世纪80年代CPU、DSP等图像处理硬件技术的飞速进步,为机器视觉飞速发展提供了基础条件。 国内机器视觉发展的大致历程:真正开始起步是20世纪80年代,20世纪90年代进入发展期,加速发展则是近几年的事情。中国正在成为世界机器视觉发展最活跃的地区之一,其中最主要的原因是中国已经成为全球的加工中心,许许多多先进生产线己经或正在迁移至中国,伴随这些先进生产线的迁移,许多具有国际先进水平的机器视觉系统也进入中国。对这些机器视觉系统的维护和提升而产生的市场需求也将国际机器视觉企业吸引而至,国内的机器视觉企业在与国际机器视觉企业的学习与竞争中不断成长。 未来机器视觉的发展将呈现下列趋势: (1)技术方面的趋势是数字化、实时化、智能化 图像采集与传输的数字化是机器视觉在技术方面发展的必然趋势。更多的数字摄像机,更宽的图像数据传输带宽,更高的图像处理速度,以及更先进的图像处理算法将会推出,将会得到更广泛的应用。这样的技术发展趋势将使机器视觉系统向着实时性更好和智能程度更高的方向不断发展。 (2)产品方面:智能摄像机将会占据市场主要地位 智能摄像机具有体积小、价格低、使用安装方便、用户二次开发周期短的优点,非常适合生产线安装使用,越来越受到用户的青睐,智能摄像机所采用的许多部件与技术都来自IT行业,其价格会不断降低,逐渐会为最终用户所接受。因此,
智能优化算法的统一框架 指导老师:叶晓东教授 姓名:李进阳 学号:2 班级:电磁场与微波技术5班 2011年6月20日
目录 1 概述 (3) 2群体智能优化算法.................................. 错误!未定义书签。 人工鱼群算法 (4) 蚁群算法 (5) 混合蛙跳算法 (9) 3神经网络算法 (10) 神经网络知识点概述 (10) 神经网络在计算机中的应用 (11) 4模拟退火算法 (15) 5遗传算法.......................................... 错误!未定义书签。 遗传算法知识简介 (17) 遗传算法现状 (18) 遗传算法定义 (19) 遗传算法特点和应用 (20) 遗传算法的一般算法 (21) 遗传算法的基本框架 (26) 6总结 (28) 7感谢 (29)
1概述 近年来,随着人工智能应用领域的不断拓广,传统的基于符号处理机制的人工智能方法在知识表示、处理模式信息及解决组合爆炸等方面所碰到的问题已变得越来越突出,这些困难甚至使某些学者对强人工智能提出了强烈批判,对人工智能的可能性提出了质疑。众所周知,在人工智能领域中,有不少问题需要在复杂而庞大的搜索空间中寻找最优解或准优解。像货朗担问题和规划问题等组合优化问题就是典型的例子。在求解此类问题时,若不能利用问题的固有知识来缩小搜索空间则会产生搜索的组合爆炸。因此,研究能在搜索过程中自动获得和积累有关搜索空间的知识,并能自适应地控制搜索过程,从而得到最优解或准有解的通用搜索算法一直是令人瞩目的课题。智能优化算法就是在这种背景下产生并经实践证明特别有效的算法。 2群体智能优化算法 自然界中群体生活的昆虫、动物,大都表现出惊人的完成复杂行为的能力。人们从中得到启发,参考群体生活的昆虫、动物的社会行为,提出了模拟生物系统中群体生活习性的群体智能优化算法。在群体智能优化算法中每一个个体都是具有经验和智慧的智能体 (Agent) ,个体之间存在互相作用机制,通过相互作用形成强大的群体智慧来解决复杂的问题。自 20世纪 90年代模拟蚂蚁行为的蚁群算法(ACO)提出以来,又产生了模拟鸟类行为的微粒群算法 ( PSO)、模拟鱼类生存习性的人工鱼群算法、模拟青蛙觅食的混合蛙跳算法 ( SFLA)等。这些群体智能优化算法的出现,使原来一些复杂的、难于用常规的优化算法进行处理的问题可以得到解决,大大增强了人们解决和处理优化问题的能力,这些算法不断地用于解决工程实际中的问题,使得人们投入更大的精力对其理论和实际应用进行研究。群体智能优化算法本质上是一种概率搜索,它不需要问题的梯度信息具有以下不同于传统优化算法的特点: ①群体中相互作用的个体是分布式的,不存在直接的中心控制,不会因为个别个体出现故障而影响群体对问题的求解,具有较强的鲁棒性; ②每个个体只能感知局部信息,个体的能力或遵循规则非常简单,所以群体智能的实现简单、方便; ③系统用于通信的开销较少,易于扩充; ④自
本科毕业论文 文献综述 题目:GPS在工程测量中的应用及数据处理 姓名:赵建平学号2009303200901 专业:地理信息系统 指导教师:苗洁职称讲师 中国·武汉 二○一三年一月 分类号密级
华中农业大学本科毕业论文 文献综述 GPS在工程测量中的应用及数据处理GPS in Engineering Measurement and Data Processing 学生姓名:赵建平 学生学号:2009303200901 学生专业:地理信息系统 指导教师:苗洁讲师 华中农业大学资源与环境学院 二○一三年一月
Ⅰ目录 1.GPS和工程测量等相关概念2 1.1GPS相关概念2 1.1.1 GPS概念2 1.1.2 GPS技术2 1.1.3 GPS卫星测量原理3 1.1.4 GPS 测量的技术特点3 1.2 工程测量介绍4 2. GPS 在现代工程测量中的具体应用分析5 2.1实时动态(RTK>定位技术简介5 2.2 静态GPS在工程测量中的应用6 2.3 动态GPS在工程测量中的应用7 3.工程测量及数据处理7 3.1工程控制网数据处理方法7 3.2 GPS基线处理与质量控制8 3.2.1 GPS基线边的解算8 3.2.2 各种检核计算9 3.2.3 平差计算和成果分析9 4.分析与总结10 5.参考文献11 6.致谢11
GPS工程测量及数据处理研究 Ⅱ摘要:GPS测量技术具有测量时间短、技术含量高、精确度高等优点,在工程测量实践中发挥着越来越重要的作用。本文主要通过介绍GPS的系统组成、工作原理、技术特点等基本情况,系统总结了GPS技术在工程测量中的应用情况,及其在工程测量后的数据处理方法。 Ⅲ关键词:全球定位系统; GPS测量技术;工程测量;应用。静态测量;动态测量;数据处理 1.GPS和工程测量等相关概念 1.1GPS相关概念 1.1.1 GPS概念 GPS是英文Navigation SatelliteTiming And Ranging/Global PositioningSystem 卫星测时测距导航/全球定位系统)的简称,而其中文简称为“球位系”。GPS是20世纪70年代由美国陆海空三军联合研制的新一代空间卫星导航定位系统。其主要目的是为陆、海、空三大领域提供实时、全天候和全球性的导航服务,并用于情报收集、核爆监测和应急通讯等一些军事目的,是美国独霸全球战略的重要组成。经过20余年的研究实验,耗资300亿美元,到1994年3月,全球覆盖率高达98%的24颗GPS卫星星座己布设完成。 1.1.2 GPS技术 GPS定位技术的高度自动化及其所达到的高精度和具有的潜力,也引起了广大测量工作者的极大兴趣。当时GPS定位基本上只有一个作业模式——静态相对定位,两台或若干台GPS接收机安置在待定点上,连续同步观测同一组卫星1-2h或更长一些时间,通过观测数据的后处理,给出各待定点间的基线向量,在采用广播星历的条件下,静态定位可取得5mm+1×10-6D<双频)或10mm+2×10-6D<单频)基线解精度。随着技术的发展,快速静态定位为短基线测量作业闯出了一条新路,大大提高了GPS测量的劳动生产率。一对GPS测量系统<双频)在10km以内的短边上,正常接收4-5颗卫星5min左右,即可获取5-10mm+1×10-6D的基
摘要:随着计算机技术的飞速发展,智能计算方法的应用领域也越来越广泛,本文介绍了当前存在的一些智能计算方法,阐述了其工作原理和特点,同时对智能计算方法的发展进行了展望。关键词:人工神经网络遗传算法模拟退火算法群集智能蚁群算法粒子群算1什么是智能算法智能计算也有人称之为“软计算”,是们受自然(生物界)规律的启迪,根据其原理,模仿求解问题的算法。从自然界得到启迪,模仿其结构进行发明创造,这就是仿生学。这是我们向自然界学习的一个方面。另一方面,我们还可以利用仿生原理进行设计(包括设计算法),这就是智能计算的思想。这方面的内容很多,如人工神经网络技术、遗传算法、模拟退火算法、模拟退火技术和群集智能技术等。 2人工神经网络算法“人工神经网络”(ARTIFICIALNEURALNETWORK,简称ANN)是在对人脑组织结构和运行机制的认识理解基础之上模拟其结构和智能行为的一种工程系统。早在本世纪40年代初期,心理学家McCulloch、数学家Pitts就提出了人工神经网络的第一个数学模型,从此开创了神经科学理论的研究时代。其后,FRosenblatt、Widrow和J.J.Hopfield等学者又先后提出了感知模型,使得人工神经网络技术得以蓬勃发展。神经系统的基本构造是神经元(神经细胞),它是处理人体内各部分之间相互信息传递的基本单元。据神经生物学家研究的结果表明,人的一个大脑一般有1010~1011个神经元。每个神经元都由一个细胞体,一个连接其他神经元的轴突和一些向外伸出的其它较短分支——树突组成。轴突的功能是将本神经元的输出信号(兴奋)传递给别的神经元。其末端的许多神经末梢使得兴奋可以同时传送给多个神经元。树突的功能是接受来自其它神经元的兴奋。神经元细胞体将接受到的所有信号进行简单处理(如:加权求和,即对所有的输入信号都加以考虑且对每个信号的重视程度——体现在权值上——有所不同)后由轴突输出。神经元的树突与另外的神经元的神经末梢相连的部分称为突触。 2.1人工神经网络的特点人工神经网络是由大量的神经元广泛互连而成的系统,它的这一结构特点决定着人工神经网络具有高速信息处理的能力。人脑的每个神经元大约有103~104个树突及相应的突触,一个人的大脑总计约形成1014~1015个突触。用神经网络的术语来说,即是人脑具有1014~1015个互相连接的存储潜力。虽然每个神经元的运算功能十分简单,且信号传输速率也较低(大约100次/秒),但由于各神经元之间的极度并行互连功能,最终使得一个普通人的大脑在约1秒内就能完成现行计算机至少需要数10亿次处理步骤才能完成的任务。人工神经网络的知识存储容量很大。在神经网络中,知识与信息的存储表现为神经元之间分布式的物理联系。它分散地表示和存储于整个网络内的各神经元及其连线上。每个神经元及其连线只表示一部分信息,而不是一个完整具体概念。只有通过各神经元的分布式综合效果才能表达出特定的概念和知识。由于人工神经网络中神经元个数众多以及整个网络存储信息容量的巨大,使得它具有很强的不确定性信息处理能力。即使输入信息不完全、不准确或模糊不清,神经网络仍然能够联想思维存在于记忆中的事物的完整图象。只要输入的模式接近于训练样本,系统就能给出正确的推理结论。 [!--empirenews.page--]正是因为人工神经网络的结构特点和其信息存储的分布式特点,使得它相对于其它的判断识别系统,如:专家系统等,具有另一个显著的优点:健壮性。生物神经网络不会因为个别神经元的损失而失去对原有模式的记忆。最有力的证明是,当一个人的大脑因意外事故受轻微损伤之后,并不会失去原有事物的全部记忆。人工神经网络也有类似的情况。因某些原因,无论是网络的硬件实现还是软件实现中的某个或某些神经元失效,整个网络仍然能继续工作。人工神经网络是一种非线性的处理单元。只有当神经元对所有的输入信号的综合处理结果超过某一门限值后才输出一个信号。因此神经网络是一种具有高度非线性的超大规模连续时间动力学系统。它突破了传统的以线性处理为基础的数字电子计算机的局限,标志着人们智能信息处理能力和模拟人脑智能行为能力的一大飞跃。 2.2几种典型神经网络简介 2.2.1多层感知网络(误差逆传播神经网络) 在1986年以Rumelhart和McCelland为首的科学家出版的《ParallelDistributedProcessing》一书中,完整地提出了误差逆传播学习算法,并被广泛
基于机器视觉的产品识别检测技术研究 摘要:机器视觉检测系统采用CCD照相机将被检测的目标转换成图像信号,传送给图像处理系统,根据像素分布和亮度、颜色等信息,转变成数字化信号,图像处理系统对这些信号进行各种运算来抽取目标特征,如面积、数量、位置,再根据预设的允许度和其他条件输出结果,包括尺寸、个数、合格/不合格、标识有无等,实现自动识别功能。机器视觉的研究是从20世纪60年代中期开始70年代已形成几个重要研究分支:目标制导的图像处理、图像处理和分析的并行运算、序列图像分析和运动参量求值、视觉知识的表示、视觉系统的知识库等。 关键词:机器视觉;CCD相机;图像处理;产品检测。
引言 机器视觉就是用机器代替人眼来做测量和判断,它是一项综合技术,其中包括数字图像处理技术、控制技术、电光源照明技术、光学成像技术、传感技术、模拟与数字视频技术等,机器视觉更强调实用性,要求能够适应工业生产中恶略的环境,要有通用的工业接口。电视摄像技术的成熟与计算机技术的发展使得机器视觉研究成为可能,它作为早期人工智能的一部分,由于技术条件的限制进展缓慢。后来在随着计算机技术的快速发展,机器视觉的研究得到了迅速发展在国外,机器视觉的应用普及主要体现在半导体及电子行业,机器视觉系统在产品检测方面已经得到了广泛的应用。在中国机器视觉技术应用开始与90年代,目前国内机器视觉大多为外国品牌,不过随着机器视觉的应用,国内公司技术上已经逐渐成熟。与此同时,随着配套基础设施建设的完善,技术、资金的积累,各行各业对机器视觉技术的工业自动化、智能化需求开始广泛出现。国内高校校、研究所和企业在这个领域进行了积极探索和大胆尝试,这都将促进工业检测自动化技术向智能化发展。
1引言 目标跟踪可分为主动跟踪和被动跟踪。视频目标跟踪属于被动跟踪。与无线电跟踪测量相比,视频目标跟踪测量具有精度高、隐蔽性好和直观性强的优点。这些优点使得视频目标跟踪测量在靶场光电测量、天文观测设备、武器控制系统、激光通信系统、交通监控、场景分析、人群分析、行人计数、步态识别、动作识别等领域得到了广泛的应用[1-2]。 根据被跟踪目标信息使用情况的不同,可将视觉跟踪算法分为基于对比度分析的目标跟踪、基于匹配的目标跟踪和基于运动检测的目标跟踪。基于对比度分析的跟踪算法主要利用目标和背景的对比度差异,实现目标的检测和跟踪。基于匹配的跟踪主要通过前后帧之间的特征匹配实现目标的定位。基于运动检测的跟踪主要根据目标运动和背景运动之间的差异实现目标的检测和跟踪。前两类方法都是对单帧图像进行处理,基于匹配的跟踪方法需要在帧与帧之间传递目标信息,对比度跟踪不需要在帧与帧之间传递目标信息。基于运动检测的跟踪需要对多帧图像进行处理。除此之外,还有一些算法不易归类到以上3类,如工程中的弹转机跟踪算法、多目标跟踪算法或其他一些综合算法。2基于对比度分析的目标跟踪算法基于对比度分析的目标跟踪算法利用目标与背景在对比度上的差异来提取、识别和跟踪目标。这类算法按照跟踪参考点的不同可以分为边缘跟踪、形心跟踪和质心跟踪等。这类算法不适合复杂背景中的目标跟踪,但在空中背景下的目标跟踪中非常有效。边缘跟踪的优点是脱靶量计算简单、响应快,在某些场合(如要求跟踪目标的左上角或右下角等)有其独到之处。缺点是跟踪点易受干扰,跟踪随机误差大。重心跟踪算法计算简便,精度较高,但容易受到目标的剧烈运动或目标被遮挡的影响。重心的计算不需要清楚的轮廓,在均匀背景下可以对整个跟踪窗口进行计算,不影响测量精度。重心跟踪特别适合背景均匀、对比度小的弱小目标跟踪等一些特殊场合。图像二值化之后,按重心公式计算出的是目标图像的形心。一般来说形心与重心略有差别[1-2]。 3基于匹配的目标跟踪算法 3.1特征匹配 特征是目标可区别与其他事物的属性,具有可区分性、可靠性、独立性和稀疏性。基于匹配的目标跟踪算法需要提取目标的特征,并在每一帧中寻找该特征。寻找的 文章编号:1002-8692(2010)12-0135-04 视频目标跟踪算法综述* 蔡荣太1,吴元昊2,王明佳2,吴庆祥1 (1.福建师范大学物理与光电信息科技学院,福建福州350108; 2.中国科学院长春光学精密机械与物理研究所,吉林长春130033) 【摘要】介绍了视频目标跟踪算法及其研究进展,包括基于对比度分析的目标跟踪算法、基于匹配的目标跟踪算法和基于运动检测的目标跟踪算法。重点分析了目标跟踪中特征匹配、贝叶斯滤波、概率图模型和核方法的主要内容及最新进展。此外,还介绍了多特征跟踪、利用上下文信息的目标跟踪和多目标跟踪算法及其进展。 【关键词】目标跟踪;特征匹配;贝叶斯滤波;概率图模型;均值漂移;粒子滤波 【中图分类号】TP391.41;TN911.73【文献标识码】A Survey of Visual Object Tracking Algorithms CAI Rong-tai1,WU Yuan-hao2,WANG Ming-jia2,WU Qing-xiang1 (1.School of Physics,Optics,Electronic Science and Technology,Fujian Normal University,Fuzhou350108,China; 2.Changchun Institute of Optics,Fine Mechanics and Physics,Chinese Academy of Science,Changchun130033,China)【Abstract】The field of visual object tracking algorithms are introduced,including visual tracking based on contrast analysis,visual tracking based on feature matching and visual tracking based on moving detection.Feature matching,Bayesian filtering,probabilistic graphical models,kernel tracking and their recent developments are analyzed.The development of multiple cues based tracking,contexts based tracking and multi-target tracking are also discussed. 【Key words】visual tracking;feature matching;Bayesian filtering;probabilistic graphical models;mean shift;particle filter ·论文·*国家“863”计划项目(2006AA703405F);福建省自然科学基金项目(2009J05141);福建省教育厅科技计划项目(JA09040)
摘要 本科毕业设计 (文献综述) 题目基于单片机的GPS定位 系统设计 姓名 专业 学号201 指导教师 信息工程学院 二○一五年五月
基于单片机的GPS定位系统设计文献综述 前言 GPS卫星导航定位技术于上世纪80年代末引入中国,目前主要在大地测量(测绘、勘探)、海上渔业和车辆定位监控等领域得到了比较广泛的应用。在全球GPS应用领域中,车辆应用所占的比重最大,目前约占总数的40%以上。1996~1997年间是GPS车辆跟踪系统市场的调整和充实时期。主要是公安、金融等部门利用其专用的常规无线电台(异频单工电台)通信系统和模拟集群系统,在全国三四十个城市建成了金融运钞车和公安交警车辆跟踪系统。1998~2000年GPS车辆跟踪系统市场出现了快速增长的势头。随着我国GSM数字移动通信系统的快速发展与全国普及,作为系统瓶颈问题的通信网络通过采用GSM公众网的短信息服务找到了新的出路,这对GPS车辆跟踪系统的发展起极大的促进作用[3]。 我国现在拥有世界上最大潜力的卫星导航应用市场。经过十多年的发展,我国的卫星导航用户设备市场化的条件日趋成熟,批量化用户群体正在逐步形成,已进入应用行业高速发展的时期。美国联邦通信委员会规定,到2005年美国95%的用户手机必须配有定位能力,2003年底前,95%的新手机有定位能力。而移动电话与GPS结合是最好的解决办法。目前,国际上一些主流手机制造商如诺基亚、爱立信和三星等已开始使用集成的GPS芯片,而日本的日本电信电话移动通信网公司、KDDI和美国的Sprint、Verizon、网信公司等电信运营商也已开始或计划提供基于GPS手机的位置服务[4]。
现代智能优化算法课程群智能优化算法综述学生姓名: 学号: 班级: 2014年6月22日
摘要 工程技术与科学研究中的最优化求解问题十分普遍,在求解过程中,人们创造与发现了许多优秀实用的算法。群智能算法就是一种新兴的演化计算技术,已成为越来越多研究者的关注焦点,智能优化算法具有很多优点,如操作简单、收敛速度快、全局收敛性好等。群智能优化就是智能优化的一个重要分支,它与人工生命,特别就是进化策略以及遗传算法有着极为特殊的联系。群智能优化通过模拟社会性昆虫的各种群体行为,利用群体中个体之间的信息交互与合作实现寻优。本文综述群智能优化算法的原理、主要群智能算法介绍、应用研究及其发展前景。 关键词:群智能;最优化;算法
目录 摘要 0 1 概述 (2) 2 定义及原理 (2) 2、1 定义 (2) 2、2 群集智能算法原理 (3) 3 主要群智能算法 (3) 3、1 蚁群算法 (3) 3、2 粒子群算法 (4) 3、3 其她算法 (5) 4 应用研究 (6) 5 发展前景 (6) 6 总结 (7) 参考文献 (8)
1 概述 优化就是人们长久以来不断研究与探讨的一个充满活力与挑战的领域。很多实际优化问题往往存 在着难解性,传统的优化方法如牛顿法、共扼梯度法、模式搜索法、单纯形法等己难以满足人们需求。 因此设计高效的优化算法成为众多科研工作者的研究目标。随着人类对生物启发式计算的研究, 一些社会性动物( 如蚁群、蜂群、鸟群) 的自组织行为引起了科学家的广泛关注。这些社会性动物在漫长的进化过程中形成了一个共同的特点: 个体的行为都很简单, 但当它们一起协同工作时, 却能够“突现”出非常复杂的行为特征。基于此,人们设计了许多优化算法,例如蚁群算法、粒子群优化算法、混合蛙跳算法、人工鱼群算法,并在诸多领域得到了成功应用。目前, 群智能理论研究领域主要有两种算法: 蚁群算法(Ant Colony Optimization, ACO) 与粒子群优化算法(ParticleSwarm Optimization, PSO)。 2 定义及原理 2、1 定义 群集智能优化算法源于对自然界的生物进化过程或觅食行为的模拟。它将搜索与优化过程模拟成个体的进化或觅食过程,用搜索空间中的点模拟自然界中的个体;将求解问题的目标函数度量成个体对环境的适应能力;将个体的优胜劣汰过程或觅食过程类比为搜索与优化过程中用好的可行解取代较差可行解的迭代过程。从而,形成了一种以“生成+检验”特征的迭代搜索算法,就是一种求解极值问题的自适应人工智能技术。各类优化算法实质上都就是建立问题的目标函数,求目标函数的最优解,因而实际工程优化问题均可转化为函数优化问题。其表达形式如下: 求: ,,2,1,0)(..), (min , ,,2,1,),,,(21Lm j X g t s X f n L i x L x x X i T n i =≤== 。Ω∈X 其中,i X 为设计变量;)(X f 为被优化的目标函数;0)(≤X g j 为约束函数;Ω为设计变量的可行
视频目标检测与跟踪算法综述 1、引言 运动目标的检测与跟踪是机器视觉领域的核心课题之一,目前被广泛应用在视频编码、智能交通、监控、图像检测等众多领域中。本文针对视频监控图像的运动目标检测与跟踪方法,分析了近些年来国内外的研究工作及最新进展。 2、视频监控图像的运动目标检测方法 运动目标检测的目的是把运动目标从背景图像中分割出来。运动目标的有效分割对于目标分类、跟踪和行为理解等后期处理非常重要。目前运动目标检测算法的难点主要体现在背景的复杂性和目标的复杂性两方面。背景的复杂性主要体现在背景中一些噪声对目标的干扰,目标的复杂性主要体现在目标的运动性、突变性以及所提取目标的非单一性等等。所有这些特点使得运动目标的检测成为一项相当困难的事情。目前常用的运动目标检测算法主要有光流法、帧差法、背景相减法,其中背景减除法是目前最常用的方法。 2.1帧差法 帧差法主要是利用视频序列中连续两帧间的变化来检测静态场景下的运动目标,假设f k(x, y)和f(k i)(x, y)分别为图像序列中的第k帧和第k+1帧中象素点(x,y)的象素值,则这两帧图像的差值图像就如公式2-1所示: Diff ki f k(x, y) f(k 1)(x, y)(2-1)2-1式中差值不为0的图像区域代表了由运动目标的运动所经过的区域(背景象素值不变),又因为相邻视频帧间时间间隔很小,目标位置变化也很小,所以运动目标的运动所经过的区域也就代表了当前帧中运动目标所在的区域。利用此原理便可以提取出目标。下图给出了帧差法的基本流程:1、首先利用2-1式得到第k帧和第k+1帧的差值图像Diff k 1;2、对所得到的差值图像Diff k 1二值化(如 式子2-2示)得到Qk+1 ;3、为消除微小噪声的干扰,使得到的运动目标更准 确,对Q k 1进行必要的滤波和去噪处理,后处理结果为M k 1。 1
毕业设计开题报告 电气工程及其自动化 机器视觉在焊接熔池实时检测与参数测定中应用 1前言部分 机械制造业作为我国国民经济的支柱产业,决定了我国的工业生产能力和水平,焊接作为制造业中总要的加工方法之一,更是有着举足轻重的作用。随着科技水平的进步,人们对焊接质量的要求也越来越高。而人工焊接时,由于受到技术水平、疲劳程度、责任心、生理极限等客观和主观因素的应影响,难以较长时间保持焊接工作的稳定性和一致性。而且,由于焊接恶劣的工作条件,愿意从事手工焊接的人在减少,熟练的技术工人更有短缺的趋势。另一方面,电子技术、计算机技术、数控及机器人技术的发展为焊接过程的自动化提供了有利的条件,并已渗透到焊接的各个领域。 以往焊接质量主要是通过两种手段来保障。焊前根据工件、材料、性能要求等制订合理的焊接工艺,但是焊接过程存在的时变性使得质量无法得到严格保证。焊后可以进行质量检验,对不合格的焊缝,返修或者清理之后再重新焊接来保证焊缝质量,但这种检验方法费时又费力,况且某些焊接产品,如船舶、桥梁、大型压力容器、航天器材等一些重要的焊接件,是不允许出现焊接质量问题的。因此焊接过程中的在线实时质量控制就显得尤为重要。 但是焊接这一技术领域长期以来采用的是传统焊接方法,尽管近些年来各类气保护焊也得到了广泛应用,但焊接变形、咬边、气孔、裂纹、应力集中、未焊合和夹渣等在缺陷问题仍然较严重。同样,采用传统焊接方法进行生产,焊接接头的外观成形质量和一致性也无法得到保证,而且手工焊接也如先前所提的原因无法普遍适用。很显然这些都成了制约焊接质量提高的根源,因此采用自动化、智能化焊接时焊接技术革新的根本出路。 随着焊接自动化智能化研究的深入,人们越来越注重对焊接质量的控制,其中熔透与成形直接反映了焊接质量,因此检测出反映焊缝熔透和成形质量信息对于质量控制是非常关键的。目前国内外普遍使用各类传感装置对焊接熔池信息进
文献综述 1 引言 在计算机视觉和模式识别领域,人脸识别技术(Face Recognition Technology,简称FRT)是极具挑战性的课题之一。近年来,随着相关技术的飞速发展和实际需求的日益增长,它已逐渐引起越来越多研究人员的关注。人脸识别在许多领域有实际的和潜在的应用,在诸如证件检验、银行系统、军队安全、安全检查等方面都有相当广阔的应用前景。人脸识别技术用于司法领域,作为辅助手段,进行身份验证,罪犯识别等;用于商业领域,如银行信用卡的身份识别、安全识别系统等等。正是由于人脸识别有着广阔的应用前景,它才越来越成为当前模式识别和人工智能领域的一个研究热点。 虽然人类能够毫不费力的识别出人脸及其表情,但是人脸的机器自动识别仍然是一个高难度的课题。它牵涉到模式识别、图像处理及生理、心理等方面的诸多知识。与指纹、视网膜、虹膜、基因、声音等其他人体生物特征识别系统相比,人脸识别系统更加友好、直接,使用者也没有心理障碍。并且通过人脸的表情/姿态分析,还能获得其他识别系统难以获得的一些信息。 自动人脸识别可以表述为:对给定场景的静态或视频序列图像,利用人脸数据库验证、比对或指认校验场景中存在的人像,同时可以利用其他的间接信息,比如人种、年龄、性别、面部表情、语音等,以减小搜索范围提高识别效率。自上世纪90年代以来,人脸识别研究得到了长足发展,国内外许多知名的理工大学及TT公司都成立了专门的人脸识别研究组,相关的研究综述见文献[1-3]。 本文对近年来自动人脸识别研究进行了综述,分别从人脸识别涉及的理论,人脸检测与定位相关算法及人脸识别核心算法等方面进行了分类整理,并对具有典型意义的方法进行了较为详尽的分析对比。此外,本文还分析介绍了当前人脸识别的优势与困难。 2 人脸识别相关理论 图像是人们出生以来体验最丰富最重要的部分,图像可以以各种各样的形式出现,我们只有意识到不同种类图像的区别,才能更好的理解图像。要建立一套完整的人脸识别系统(Face Recognetion System,简称FRS),必然要综合运用以下几大学科领域的知识: 2.1 数字图像处理技术 数字图像处理又称为计算机图像处理,它是指将图像信号转换成数字信号并利用计算机