基于总线模式的工业机器人控制系统
张爱民,王倩
【摘要】摘要:针对目前国内工业机器人开发周期长、成本高、通用性差的问题,提出基于工业现场总线GSK-link的模块化、标准化工业机器人结构体系,并开发了相关产品,部分产品已应用于公司电机制造生产线上。经实验测试和现场实际应用,发现基于模块化体系结构的工业机器人性能较传统工业机器人有较大改善,系统故障率较低,系统维护和维修简便。
【期刊名称】机械
【年(卷),期】2010(037)009
【总页数】3
【关键词】总线;工业机器人;控制系统
工业机器人工作在结构化的工业现场环境中,可将人从繁重、单调与重复的体力劳动中部分解脱出来,目前已大量应用于汽车、电子、信息产品等现代制造业。目前国际上还没有专用于机器人系统中的伺服通信总线,在实际应用过程中通常根据系统需求,把常用的一些总线,如以太网、CAN、1394、SERCOS、USB、RS-485等,用于机器人系统中。Gsk_link伺服通讯总线采用低成本以太网技术,物理层采用市场上通用产品,数据链路层采用FPGA编程实现。本文讨论的工业机器人拟采用Gsk_link伺服总线,利用伺服总线将主控制器、示教盒、驱动器、IO单元、传感器等主从设备连接起来。
1 总线模式工业机器人的总体方案设计
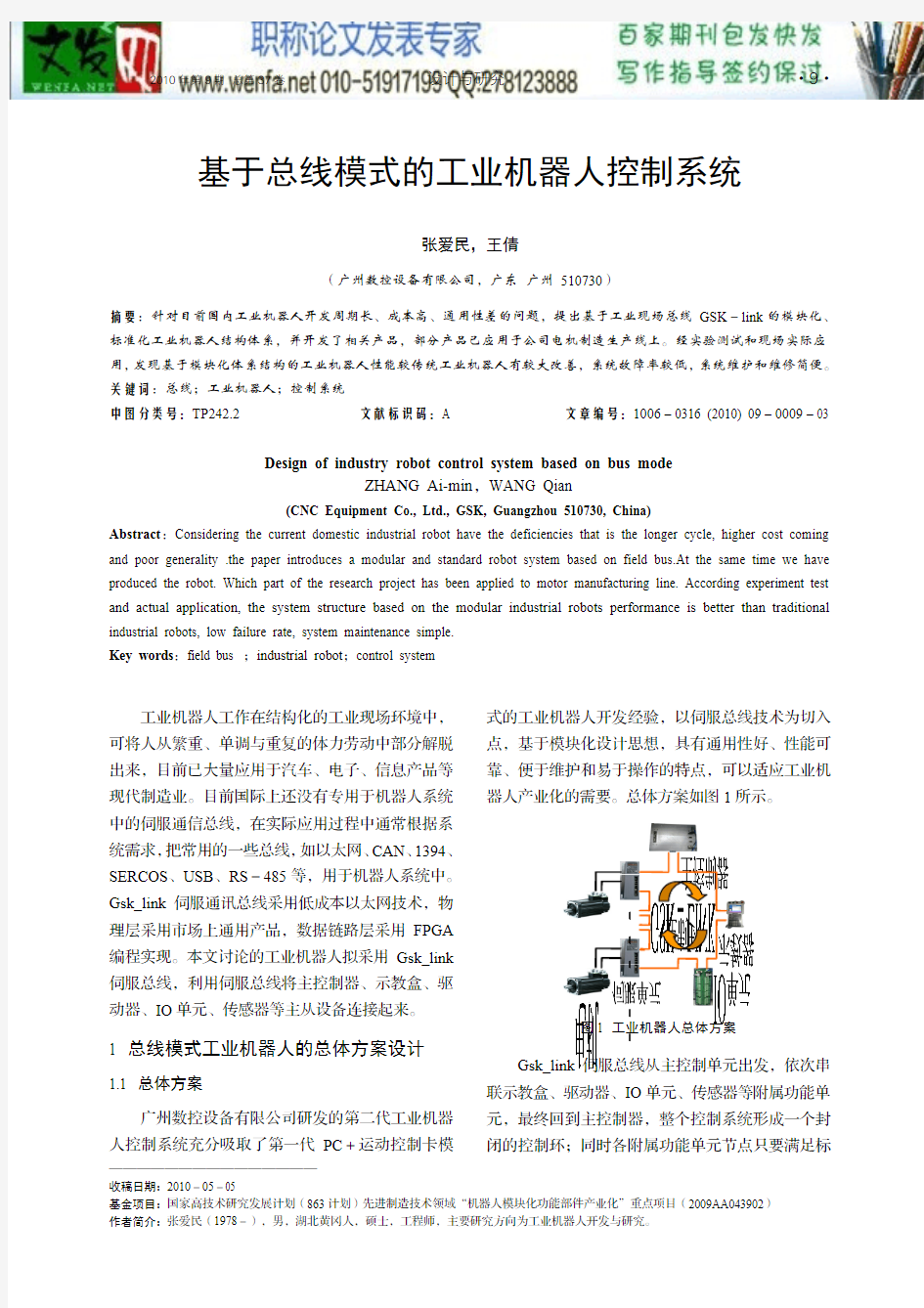
1.1 总体方案
广州数控设备有限公司研发的第二代工业机器人控制系统充分吸取了第一代PC