
第三章金属塑性变形的力学基础
金属在外力作用下由弹性状态进入塑性状态,研究金属在塑性状态下的力学行为称为塑性理论或塑性力学,它是连续介质的一个力学分支。为了简化研究过程,塑性理论通常采用以下假设:
1)变形体是连续的,即整个变形体内不存在任何空隙。这样,应力、应变、位移等物理量也都是连续的,并可用坐标的连续函数来表示。
2)变形体是均质的和各向同性的。这样,从变形体上切取的任一微元体都能保持原变形体所具有的物理性质,且不随坐标的改变而变化。
3)在变形的任意瞬间,力的作用是平衡的。
4)在一般情况下,忽略体积力的影响。
5)在变形的任意瞬间,体积不变。
在塑性理论中,分析问题需要从静力学、几何学和物理学等角度来考虑。静力学角度是从变形体中质点的应力分析出发,根据静力学平衡条件导出该点附近各应力分量之间的关系式,即平衡微分方程。几何学角度是根据变形体的连续性和均匀性,用几何的方法导出应变分量与位移分量之间的关系式,即几何方程。物理学角度是根据实验与假设导出应变分量与应力分量之间的关系式。此外,还要建立变形体从弹性状态进入塑性状态并使塑性变形继续进行时,其应力分量与材料性能之间的关系,即屈服准则或塑性条件。
以上是塑性变形的力学基础,也是本章的主要内容。它为研究塑性成形力学问题提供基础理论。
第一节金属塑性成形过程的受力分析
塑性成形是利用金属的塑性,在外力作用下使金属成形的一种加工方法。作用于金属的外力可以分为两类:一类是作用在金属表面上的力,称为面力或接触力,它可以是集中力,但更一般的是分布力;第二类是作用在金属每个质点上的力,称为体积力。
1. 面力
面力可分为作用力、反作用力和摩擦力。
作用力是由塑性加工设备提供的,用于使金属坯料产生塑性变形。在不同的塑性加工工序中,作用力可以是压力、拉力或剪切力,但在多数情况下是用压力来成形的,因此塑性加工又称为压力加工。
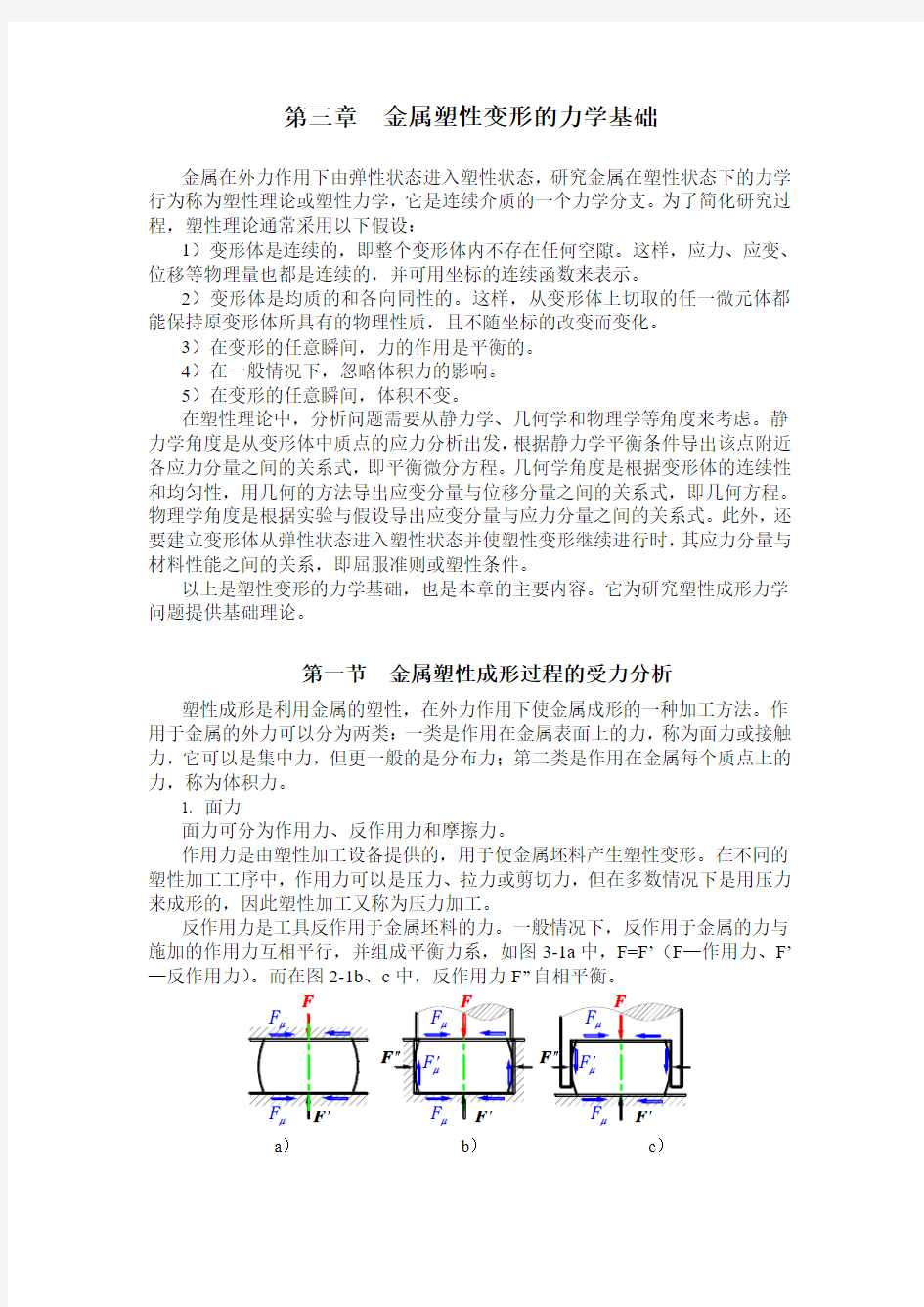
反作用力是工具反作用于金属坯料的力。一般情况下,反作用于金属的力与施加的作用力互相平行,并组成平衡力系,如图3-1a中,F=F’(F—作用力、F’—反作用力)。而在图2-1b、c中,反作用力F’’自相平衡。
a)b)c)
图3-1 镦粗时的受力分析
a)在平模具间镦粗b)在凹模内镦粗c)在凸模内镦粗金属在外力作用下产生塑性变形时,在金属与工具的接触面上产生阻止金属流动的摩擦力。摩擦力的方向通常与金属质点移动的方向相反,其最大值不应超过金属材料的抗剪强度。在图3-1a中的摩擦力Fμ自相平衡,而图3-1b中的摩擦力F’μ对金属底部变形起阻碍作用,不利于底部金属的充满,此时,F=F’+F’μ。在图3-1c中摩擦力F’μ有利于底部金属的充满,起到作用力的效果,此时,F’+ F’μ=F’。
2. 体积力
体积力是与变形体内各质点的质量成正比的力,如重力、磁力和惯性力等。对一般的塑性成形过程,由于体积力与面力相比要小得多,可忽略不计。因此,一般都假定是在面力作用下的静力平衡力系。
但在高速成形时,如高速锻造,爆炸成形等,惯性力不能忽略。在锤上模锻时,坯料受到由静到动的惯性力作用,惯性力向上,有利于金属填充上模,故锤上模锻通常将形状复杂的部位设置在上模。
在高速锤上挤压时,工件在出口部分的速度ν1远远大于工具运动速度ν0(图3-2)。根据体积不变条件,ν1=ν0A0/A1,当挤压比A0/A1= 5(A0、A1为挤压前和挤压后坯料的横截面积),ν1可达的100m/s。当挤压结束时,在如此高的速度下突然停止,工件受到由动到静的惯性力作用,且惯性力的方向向下。这时,有可能使工件产生缩颈,甚至拉断。
图3-2 高速锤上挤压时的惯性力
第二节变形体内一点的应力状态分析
物体变形时的应力状态是表示物体内所承受应力的情况。只有了解变形物体内任意一点的应力状态,才可能推断出整个变形物体的应力状态。点的应力状态是指物体内一点任意方位微小面积上所承受的应力情况,即应力的大小、方向和个数。
一、应力分析的截面法
在外力作用下,变形体内各质点之间就会产生相互作用的力,叫做内力,单位面积上的内力称为应力。图3-3 表示物体受外力系F 1,F 2,F 3,…的作用而处于平衡状态。若要知道物体内Q 点的应力,可以过Q 点作一法线为N 的平面B ,将物体切成两部分并移出上半部分,则B 面上的内力就变成外力,并与作用在下半部分的外力相平衡。
σ
图3-3 内力和应力图 图3-4 单向拉伸时任意斜面上的应力
在B 面上围绕Q 点取一无限小的面积 ΔA ,设该面积上内力的合力为 ΔF ,则定义
为B 面上Q 点的全应力。全应力S 可以分解成两个分量,一个垂直于B 面的分量,称为正应力或法向应力,一般用σ表示;另一个平行于B 面的分量,称为切应力,一般用τ表示。
过Q 点可以作无限多的切面,在不同方位的切面上,Q 点的应力显然是不同的。现以单向均匀拉伸为例进行分析。如图3-4所示,垂直于试棒拉伸轴线的横截面上的应力为
式中 F ——轴向拉力;
A 0——试棒的横截面面积。
现过Q 点作切面B ,其法线N 与拉伸轴成θ角,则B 面上Q 点的全应力、正应力和切应力分别为
}
式(3-2)表明,Q 点任意切面上的应力随其法线的方向角θ的变化而变化,即是θ角的函数。对于单向均匀拉伸,只要确定出σ0,则Q 点任意切面上的应力也就可以确定。因此,只用一个应力σ0就可以表示出单向拉伸时点的应力状态。
00
200cos cos cos cos 1sin sin 22
F F S A A S S θσθ
σθσθ
τθσθ=======(3-2)
(3-1) lim 0F dF S A A dA
?==?→?00
F A σ=
二、三维坐标系的应力分量和应力张量 塑性成形时,变形体一般是多向受力,显然不能只用一点某一切面上的应力来求得该点其他方向切面的应力。也就是说,仅仅用某一方向切面上的应力还不足以全面地表示出一点的受力状况。
设在直角坐标系 Oxyz 中有一承受任意力系的物体,物体内有任意点 Q ,围绕 Q 切取一个平行于坐标面的平行六面体作为单元体。如图3-5所示。由于各微分面上的全应力都可以按坐标轴方向分解为一个正应力分量和两个切应力分量,这样,三个互相垂直的微分面上共有九个应力分量,其中三个正应力分量,六个切应力分量。因此,在一般情况下表示一点的应力状态需要用坐标面上的九个应力分量来描述。
图3-5 直角坐标系中单元体上的应力分量
每个应力分量的符号带有两个下角标:第一个角标表示该应力分量所在的坐标面(用该面的法线方向命名);第二个角标则表示应力所指的坐标方向。正应力分量的两个下角标相同,一般只用一个下角标表示,例如σxx 简写为σx 。为清楚起见,可将九个应力分量写成下列矩阵形式:
应力分量的正、负号规定如下:在单元体上,外法线指向坐标轴正向的微分
面叫做正面,反之称为负面(图3-5中只标出了正面上的应力,负面上的应力没有标出)。在正面上,指向坐标轴正向的应力分量取正号,反之取负号:在负面上,指向坐标轴负向的应力分量为正,反之为负。这个规定与习惯上拉应力为正,压应力为负相一致。按此规定,图3-5中所标的切应力分量都是正的,这与材料力学中关于切应力正负号的规定是不同的。
由于单元体处于静力平衡状态,不发生旋转,故绕单元体各坐标轴的合力矩必须等于零,由此可以导出切应力互等定理
τxy = τyx ; τyz = τzy ; τzx = τxz (3-3)
xy xz x yx yz y zx zy z στττστττσ?? ? ? ???
因此,这九个应力分量只有六个是独立的。这样,任意点的应力只需用坐标面上六个应力分量来表示。
图3-5的坐标系是任意选取的,在一定外力条件下,物体内任意点的应力状态已被确定,如果取不同的坐标,则表示该点应力状态的九个分量将有不同的数值,而该点的应力状态并没有变化。某一坐标系的九个分量组成的物理量,能被转换到另一坐标系,这种物理量在数学上叫做二阶张量,简称为张量。因此,点的应力状态是一个张量。称为应力张量,可用张量符号σij 表示,即
(3-4)
σij 是应力张量的缩写符号,角标i 和j 分别表示x ,y ,z ,即i =x ,y ,z ;j =x ,y ,z 。因此,σij 代表了九个应力分量,其中角标不重复的表示切应力,写成τxy ,τyx ,…。
图3-6 圆柱坐标系中单元体上的应力分量
由于切应力互等,即τij = τji ,式(3-4)对称于对角线,所以应力张量是对称张量,也可以简写为
(3-4a)
张量有许多特性,例如张量可以合并,也可以分解,存在主方向,有主值及不变量等,这些对于进一步分析应力状态是分有用的。在后面的分析中将要引用这些特性,而不加以证明,也不涉及张量的运算。
当变形体是旋转体时,用圆柱体系更为方便,三个坐标轴分别为ρ(或r )——径向、θ——周向、z ——轴向。用圆柱坐标表示的单元体及应力状态如图3-6所示,应力张量为
(3-5) xy xz x ij yx yz y zx zy z σττστστττσ??
?
= ? ?
??xy xz x ij yz y z σττσστσ??
?
= ? ??? z ij z
z z z ρρθρθρθθρθσττστστττσ??
?
= ? ???
三、任意斜面上的应力
如果变形体中一点的九个应力分量已知,便可以求得过该点任意斜面上的应力,这就表明该点的应力状态完全被确定。下面通过静力平衡来求任意斜面上的应力。
图3-7 任意斜面上的应力
如图3-7所示,已知Q 点三个互相垂直坐标面上的应力分量为σij ,任意斜面ABC 与三个坐标轴相交于A 、B 、C 。设斜面ABC 的外法线方向为N ,它与x 、y 、z 三个坐标轴的方向余弦为
l = cos (N ,x ); m =cos (N ,y ); n = cos (N ,z ) 若斜面ABC 面积为dA ,则dA 在三个坐标面上的投影面积分别为
现设斜面ABC 上的全应力为S ,它在三个坐标轴方向的分量为S x 、S y 、S z ,由于四面体QABC 处于平衡状态,由静力平衡条件∑F x = 0,有
整理得
同理
于是可求得全应力为
(3-7)
全应力S 在法线N 上的投影就是斜面上的正应力σ,它等于Sx 、Sy 、Sz 在N 上的投影之和,即
(3-8)
斜面上的切应力为
(3-9) 如果质点处于受力物体的边界上,则斜面ABC 即为物体的外表面,作用在
d d ;d d ;d d x y z A l A A m A A n A
===d d d d 0x x x yx y zx z S A A A A σττ-+-=x x yx zx S l m n
σττ=++y xy y zy S l m n τστ=++z xz yz z S l m n ττσ=++(3-6) }
2222x y z S S S S =++x y z S l S m S n σ=++()2222x y z xy yz zx l m n lm mn nl σσστττ=+++++222
S τσ=-
其上的表面力(外力)F 沿坐标轴的分量为Fx 、Fy 、Fz ,式(2-6)仍成立,根据式(3-6)即可得到
(3-10)
式(3-10)称为应力边界条件。
四、主应力和应力不变量 1. 主应力 由式(3-8)、式(3-9)可知,任意斜面上正应力σ和切应力τ,是随着该面法线N 的方向余弦l 、m 、n 的变化而变化。过一点可以作无数个斜面,总能得到这样一组斜面,其上只有正应力没有切应力,也就是说斜面上的全应力S 和正应力σ重合,而切应力τ=0。这种切应力为零的平面,叫做主平面。主平面上的正应力,叫做主应力。主平面的法线方向,就是主应力方向,叫做应力主方向或应力主轴。
现设图3-7中的斜面ABC 是待求的主平面,面上的切应力τ=0,因而正应力就是全应力,即σ=S 。于是全应力S 在三个坐标轴上的投影为
Sx = Sl = σl Sy = Sm = σm Sx = Sn =σn
将S x 、S y 、S z 的值代入式(3-6),整理后得
(3-11)
上式是以l 、m 、n 为未知数的齐次方程组,常数项为零,其解就是应力主轴的方向。由解析几何知,方向余弦之间存在以下关系
即l 、m 、n 不可能同时为零。根据线性方程组理论,只有在方程组的系数组成的行列式等于零的条件下,该方程组才有非零解。所以必有
展开行列式,整理后得
σ3 - (σx +σy +σz )σ2 +[σx σy +σy σz +σz σx -(τ2xy +τ2yz +τ2zx )] σ - [σx σy σz +2τxy τyz τz x -(σx τ2yz +σy τ2zx +σz τ2xy )] = 0
设
(3-13)
x x yx zx y xy y zy z xz yz z F l m n F l m n
F l m n
στττστττσ=++=++=++}
()()()0
0x yx zx xy y zy xz yz z l m n l m n l m n σστττσστττσσ-++=+-+=++-=2221
l m n ++=0x xy xz yx y yz zx zy z σστττσστττσσ
--=-()
22232x y z xy yz xz x yz y zx z xy J σσστττστστστ=+-++}
}
}
()2222[]
z x y y z x xy yz zx J σσσσσστττ=-++-++1z
x y J σσσ=++
于是有 σ3 - J 1σ2
– J 2σ– J 3 = 0 (3-14) 上式称为应力特征方程。可以证明,该方程必然有一组唯一的三个实根,它的三个实根就是主应力σ1、σ2、σ3。将所得的主应力代入式(3-11)中的任意两式,并与式(3-12)联解,便可求出三个互相垂直的主方向。
2. 应力张量不变量
对于一个确定的应力状态,只能有一组主应力。因此,方程式(3-14)的系数 J 1、J 2和J 3应该是单值的,不随坐标而变,分别称为应力张量的第一、第二、第三不变量。于是可以得出如下的重要结论:尽管应力张量的各分量随坐标而变,但按式(3-13)的形式组成的函数值是不变的。所以,应力张量的三个不变量表示了一个确定的应力状态其应力分量之间的确定关系。
存在主值、主方向和不变量,这些也正是张量的重要特性。
如果以主轴作为坐标系,则一点的应力状态只有三个主应力,应力张量为 (3-4b )
在主轴坐标系中斜面上应力分量的公式可以简化为下列表达式
S 1 =σ1l ; S 2 =σ2 m ; S 3 =σ3 n (3-6a ) S 2=σ12l 2 +σ2 2m 2 +σ32 n 2 (3-7a ) σ = σ1l 2 +σ2 m 2 +σ3n 2 (3-8a ) 及 τ2 = S 2-σ2 =σ12l 2 +σ2 2m 2 +σ32 n 2 - (σ1l 2 +σ2 m 2 +σ3n 2)2 (3-9a ) 应力张量的三个不变量为
(3-13a )
由此可见,用主应力表示应力状态,可使运算大为简化,在后面的工序分析中,一般都近似认为变形过程处于主应力状态。另外,利用应力张量不变量,可以判别应力状态的异同。如有以下两个应力张量
上述两个应力张量是否表示同一应力状态,可以通过求得的应力张量不变量是否相同来判断。按式(3-13)计算,上述两个应力状态的应力张量不变量相等,均为
J 1 = a + b , J 2 = -ab , J 3 = 0 所以,上述两个应力状态相同。
3. 应力椭球面
应力椭球面是在主轴坐标系中点的应力状态的几何表达式。
1123J σσσ=++()2122331J σσσσσσ=-++3123J σσσ=}
123000000ij σσσσ?? ?= ? ?
??10000000ij a b σ?? ?= ? ???2022
022000ij a b a b a b a b σ+-??
? ?
-+ ?= ? ? ? ???
由式(3-6a )可得
由于
于是得 (3-15)
这是椭球面方程,其主半轴的长度分别等于σ1、σ2、σ3。这个椭球面称为应力椭球面,如图3-8所示。对于一个确定的应力状态,任意斜面上全应力矢量S 的端点必然在椭球面上。
图3-8 应力椭球面图
在三个主应力中,如果有两个主应力为零,叫单向应力状态。属圆柱应力状态。如果一个主应力为零,则是两向应力状态(或平面应力状态),此时应力椭球面变为在某个平面上的椭圆轨迹。如果有两个主应力相等,例如σ2=σ3,应力椭球面变成为旋转椭球面,该点的应力状态对称主轴O 1,也属圆柱体应力状态。 如果三个主应力都相等,则应力椭球面变成了球面,称为球应力状态。由式(3-9a )可知,τ=0,此时所有方向都是主方向,且应力都相等。
例2-1 设某点应力状态如图3-9所示,试求其主应力及主方向(应力单位:MPa )。
图3-9 某点的应力状态
解 图3-9所示的应力张量为
312
123
;;S S S l m n σσσ===2221
l m n ++=222
3122221231S S S σσσ++=423261315ij σ??
??=??
????
将各分量代入式(3-13),得 J 1 = 15;J 2 = -60;J 3 = 54 再将不变量代入式(3-14),得 σ3 - 15σ2 + 60σ - 54 = 0 分解因式 (σ – 9)(σ2 -6σ + 6)= 0
解得 将应力分量代入式(3-11),并与式(3-12)一起写成方程组
为求主方向,可分别将主应力的数值代入上式,并联解方程组。由于前三式是不定方程组,只需用其中两式与第四式联解,或者求出不定方程组的通解再代入第四式求解。例如,求σ1的方向时,将σ1=9代入前两式得l 1=m 1和m 1= n 1,由第四式解得
对于σ1
=0.577
对于σ2
对于σ3 l 3 = 0.789;m 3 = - 0.211;n 3 = 0.577 4. 主应力图
受力物体内一点的应力状态可用作用在应力单元体上的主应力来描述,只用主应力的个数及符号来描述一点应力状态的简图称为主应力图。一般主应力图只表示出主应力的个数及正、负号,并不表明所作用应力的大小。
主应力图共有九种,其中三向应力状态有四种,二向应力状态有三种,单向应力状态有两种,如图3-10所示。在两向和三向主应力图中,各向主应力符号相同时,称为同号主应力图,符号不同时,称为异号应力图。根据主应力图,可定性比较某一种材料采用不同的塑性成形加工工艺时,塑性和变形抗力的差异。
123
9;33σσσ===()()()4230260350l m n l m n l m n σσσ-++=+-+=++-=2221
l m n ++=}
111l m n ===1111/l m n ===222
0.211;0.789;0.577
l m n ====-==
图3-10 主应力图种类
五、主切应力和最大切应力
与分析斜面上的正应力一样,切应力也随斜面的方位而改变,当斜面上的切应力为极大值时,该切应力称为主切应力。主切应力作用的平面称为主切应力平面。
为方便起见,取应力主轴为坐标轴,任意斜面的法线方向余弦为l 、m 、n ,则斜面上的切应力可由式(3-9a )求得,即
τ2 = σ12l 2 +σ2 2m 2 +σ32 n 2 - (σ1l 2 +σ2 m 2 +σ3n 2)2 (a ) 以 n 2 = 1 – l 2 – m 2 代入式(a ),可得
τ2 = (σ12 -σ32 )l 2+(σ2 2 -σ32 )m 2+σ32 – [(σ1 -σ3)l 2+(σ2 -σ3 )m 2+σ3]2 为求切应力的极值,将式(a )分别对l 、m 求偏导数并令其为零,若σ1>σ2 >σ3,经化简后得
l {(σ1 -σ3 )- 2[(σ2 - σ3)l 2 +(σ2 - σ3)m 2]} = 0
m {(σ2 -σ3 )- 2[(σ1 - σ3)l 2 +(σ2 - σ3)m 2]} = 0 (b )
将上述两式与l 2 + m 2 + n 2
= 1联立求解,可得三组方向余弦。按同样的方法,从式(3-9a )中消去l 或m ,还可解出另外三组方向余弦值,见表3-1。将各组的方向余弦值分别代入式(3-8a )和(3-9a )中,可解出这些平面上的正应力和切应力值。
表3-1 切应力为极值6组方向余弦
平面上的切应力有极大值,为主切应力平面。主切应力平面共有12个,它们分别与一个主平面垂直,与另外两个主平面交成450角,如图3-11所示。主切应力值为
τ12=±(σ 1 - σ 2)/2 τ23= ±(σ 2 - σ 3)/2 τ31= ±(σ 3 - σ 1)/2
三个主切应力中绝对值最大的一个叫做最大切应力,用表示τmax 表示。其值为
τmax = τ13=(σ 1 - σ 3)/2 (3-17)
主切应力平面上的正应力为
σ 12 =(σ 1+ σ2)/2 σ 23 =(σ 2+ σ 3)/2 σ 31 =(σ 3+ σ 1)/2
从式(3-16)可以看出:
1) 若σ 1=σ 2= σ3=±σ ,即变形物体处于三向等拉或三向等压的应力状
} (3-16) }
(3-18)
态(即球应力状态)时,主切应力为零,即
τ12=τ23=τ31=0
2) 若三个主应力同时增加或减少一个相同的值时,主切应力值将保持不变。
主切应力的这些性质对于研究金属塑性变形有重要意义。
a )
b )
c )
图3-11 主切应力平面
六、应力球张量和应力偏张量 1. 应力张量的分解
按照应力的叠加原理,表示受力物体内任一点应力状态的应力张量可以分解为应力球张量和应力偏张量两部分。
现设σ m 为三个正应力分量的平均值,称为平均应力,即
(3-19)
由式(3-19)可知,σ m 是不变量,与所取的坐标无关,即对于一个确定的应力状态,它为单值。于是可将三个正应力分量写成 σx =(σ x - σm ) + σ m = σx ’+ σ m σy =(σ y - σm ) + σ m = σy ’+ σ m σz =(σz - σm ) + σ m = σz ’+ σ m
将上式代入应力张量表达式(3-4)中,即可将应力张量分解成两个张量,有
或简记为 (3-20a )
式中为δij 克氏符号,也称单位张量,当i=j 时,δij =1;当i ≠j 时,δij =0。使用克氏符号可以将角标不同的元素去掉。
若取主轴坐标系,则式(3-20)为
(3-20b )
()()112311
333
m x y z J σσσσσσσ=++=++=x xy xz ij yx y yz zx zy z σττστστττσ????==??????000000x m x y xz m y x y m y z m z x
z y z m m σσττστσστσττσσσ??-??
????-+????????-????ij ij ij m σσδσ'=+(3-20) 1230
00000ij σσσσ????==??????123000000000000m m m m m m σσσσσσσσσ-????????-+????????-????
()()()()()2222222222
16x y y z z x xy yz zx x y y z z x xy yz zx J σσσσσστττσσσσσστττ??'''''''=-++-++????=-+-+-+++????应力张量的分解也可以用图2-12表示。
式(3-20)右边的后一项表示球应力的状态,故称应力球张量。其任何方向都是主方向,而且主应力相同,均为平均应力σ m ,因此,也称静水应力状态。由于球应力状态在任何斜面上都没有切应力,所以它不能使物体产生生形状变化(塑性变形),只能产生体积变化。
式(3-20)右边的前一项σ ’ij 称为应力偏张量,它是由原来的应力张量分解出球张量后得到的,即
由于被分解出的应力球张量没有切应力,任意方向都是主方向且主应力相等。因此,应力偏张量σ ’ij 的切应力分量、主切应力、最大切应力以及应力主轴等等都与原应力张量相同。因而应力偏张量使物体产生形状变化,而不能产生体积变化,材料的塑性变形就是由应力偏张量引起的。
应力张量应力偏张量应力球张量
图3-12 应力张量的分解
a )任意坐标系
b )主坐标系
2. 应力偏张量不变量
应力偏张量是由原应力张量减去球张量后得到的,它仍然是一个张量,而且是二阶对称张量。因此,应力偏张量同样存在三个不变量,分别用J ’1、J ’2和J ’3表示。将应力偏张量的分量代入式(3-13),可得
J ’1 =σ’x + σ’y + σ’z =(σx - σm )+ (σy –σm )+(σz –σm )
对于主轴坐标系,有 J ’1 = 0
J ’2 = 16
[(σ1 –σ2 )2+(σ2 -σ3 )2+(σ1 -σ3)2] J ’3 = σ’1σ’2 σ’3
应力偏张量的第一不变量J ’1 = 0,表明应力分量中已经没有静水应力成分。
ij
ij ij m σσδσ'=-3x xy xz yx y yz zx zy z J σττσττσ'''='(3-21) }
(3-21a) }
第二不变量J ’2与屈服准则有关(见本章每四节)。第三不变量J ’3决定了应变的类型;J ’3 > 0属伸长类应变;J ’3 = 0属平面应变;J ’3 < 0属压缩类应变。
例 3-2 已知简单拉伸、拉拔及挤压变形区的应力张量分别为
、 、 (应力单位:10MPa ),试分解为球张量和偏张量,并画出分解的主应力图。 解 对于简单拉伸,因为σ1 = 6,σ2 = σ3 = 0,则 所以 σ’1 = σ1 –σm = 4, σ’2 = σ’3 = 0 - σm = -2
则
对于拉拔,因为σ1 = 3,σ2 = σ3 = -3,则 σm =(σ1 +σ2 +σ3 )/3 = -1
所以 σ’1 = σ1 –σm , σ’2 = σ’3 = -3 - σm = -2
则
对于挤压,因为σ1 = -2,σ2 = σ3 = -8,则
123
63
m σσσσ++==-
所以 σ’1 = σ1 –σm = 4, σ2 = σ3 = - 8 - σm = -2
则
上述应力张量分解见图3-13。经比较可以看出,三种加工方式的应力状态虽然不同,但它们的应力偏张量却相同,所产生的变形都是轴向伸长,横向收缩,同属于伸长类应变。因此,根据应力偏量,可以判断变形的类型。
600000000??????????300030003????-????-??
200080008-????-????-??1236
2
33
m σσσσ++===600200400000020020000002002??????
??????
=+-????????????-??????300100400030010020003001002-??????
??????
-=-+-????????????---??????20060
0400080060020008006002--????????????
-=-+-????????????---??????
图3-13 应力张量分解
a )简单拉伸
b )拉拔
c )挤压
七、八面体应力和等效应力 1. 八面体应力
以受力物体内任意点的应力主轴为坐标轴,在无限靠近该点处作等倾斜的微分面,其法线与三个主轴的夹角都相等。在主轴坐标系空间八个象限的等倾斜面构成一个正八面体,如图3-14所示,正八面体的每个平面称为八面体平面,其面上的应力称为八面体应力。
图3-14 八面体应力
八面体平面的方向余弦为
代入式(3-8a )和(3-9a
σ8和八面体切应力τ8:
l m n ===
(3-22)
(3-23)
由上面两式可以看出,σ8就是平均应力,即球张量,是不变量。τ8则是与应力球张量无关的不变量,反映了三个主切应力的综合效应,与应力偏量第二不变量J ’2有关。若式(3-22)中的J 1和式(3-23)中的J ’2若分别用式(3-13)和(3-21)代入,可得到用任意坐标系应力分量表示的八面体应力
(3-22a )
(3-23a ) 主应力平面、主切应力平面和八面体平面都是一点应力状态的特殊平面,总共有26个,这些平面上的应力值,对研究一点的应力状态有重要作用。
2. 等效应力
将八面体切应力τ8乘以3/称为等效应力,也称广义应力或应力强度,用σ表示。对主轴坐标系
(3-24) 对任意坐标系
(3-24a )
等效应力有以下特点:
1) 等效应力是一个不变量。
2) 等效应力在数值上等于单向均匀拉伸(或压缩)时的拉伸(或压缩)应力σ1,即σ= σ1。
3) 等效应力并不代表某一实际表面上的应力,因而不能在某一特定平面上表示出来;
4) 等效应力可以理解为代表一点应力状态中应力偏张量的综合作用。 等效应力是研究塑性变形的一个重要概念,它是与材料的塑性变形密切关系的参数。
八、应力平衡微分方程
在外力作用下处于平衡状态的变形物体,其内部点与点之间的应力大小是连续变化着的,也就是说,应力是坐标的连续函数。
在直角坐标系中,设物体内一点Q 的坐标为x 、y 、z ,应力状态为σij ,在Q 点无限邻近处有另一点Q ’,坐标为x +d x 、y +d y 、z +d z ,则形成一个边长为d x 、d y 、d z 并与三个坐标面平行的平行六面体,由于坐标的微量变化,因此Q ’点的应力比Q 点的应力要增加一个微小的增量。如Q 点面上的正应力分量为σx ,则Q ’
点面上的正应力分量应为x
x dx x
σσ?+?。依此类推,故Q ’点的应力状态(图3-15)
为
()1
8123133J σσσσ=++=8τ===18τ=8σ==σ=
d d d d d d d d d d d d d d d 0
yx x zx x yx zx x yx zx x y z y z x z x y x y z y z z x x y τστσττσττ????????
?+++++ ? ? ??????????
---=000yx x zx
xy y zy
yz xz z
x y z
x y z
x y z τσττστττσ???++=??????++=??????++=???10
21010z z z z z
z z z z ρθρ
ρρθρθρθθ
θρρθσττσσρρθρττστρρθρ
τττσρ
???-+++=??????+++=??????+++=???
由于六面体处于静力平衡状态,因此作用在六面体上所有力沿坐标轴的投影之和应等于零。如沿x 轴有
同理沿y 和z 轴还可以写出与上式类似的两个等式。化简整理后,可得直角坐标系中质点的应力平衡微分方程式为
}
简记为 (3-25a )
当变形体是旋转体时,用圆柱坐标更为方便。按同样方法,得圆柱坐标的应力平衡微分方程式
(3-25) (3-26) x xy xz xy xz x
yx y yz ij yx yz y zx zy z zx zy z dx dx dx x x x dy dy dy y y y
dz dz dz z z z σττστττστστστττσττσ?????+++ ???? ???? ?
=+++ ???? ?
???
?+++ ??????0
ij i
x σ?=?
00yx
x xy y x y
x y
τστσ??+=????+=??图3-15 直角坐标中一点邻区的应力平衡
九、平面应力状态和轴对称应力状态
求解一般的三维问题是很困难的,在处理实际问题时,通常要把复杂的三维问题简化为平面的或轴对称的状态。因此,研究平面问题的应力状态和轴对称应力状态有重要的实际意义。平面问题的应力状态有两类:一类是平面应力状态;另一类是平面应变状态下的应力状态,下面分别加以讨论。
1. 平面应力状态
如图3-16a 所示,在变形体为板料或薄壁件时,常常可以认为某个平面(如板面)上没有应力的作用,这就是平面应力状态。平面应力状态的特点是:1) 变形体内各质点在与某一方向(如 z 向)垂直的平面上没有应力作用,即σz =τzx =τzy =0,z 轴为主方向,只有σx 、σy 、τxy 三个应力分量;2)σx 、σy 、τxy 沿 z 轴方向均匀分布,即应力分量与 z 轴无关,对 z 轴的偏导数为零。
a) b)
图3-16 平面应力状态
a )单元体上的应力
b )任意方向斜面上的应力
在工程实际中,薄壁管扭转、薄壁容器承受内压、板料成形中的一些工序等,由于厚度方向的应力相对很小而可以忽略,一般均作为平面应力状态来处理。
平面应力状态的应力张量为 (3-27)
在直角坐标系中,由于σz =τzx =τzy =0,由式(3-25)可得平面应力状态下的应力平衡微分方程为
}
平面应力状态下任意斜面上的应力、主应力和主切应力可分别由三向应力状态的公式导出。如图3-16b 所示,设斜面AB 的法线N 与x 轴的交角为υ,则该
12000000000000x xy ij yx y ij στσστσσσ????
????==????
???????? 或 (3-28)
2123;;0
x y x y xy J J J σσσστ=+=-+=()220
x y x y xy σσσσσστ-++-=斜面的三个方向余弦为
由式(3-6),得
(3-29)
则斜面上的正应力由式(3-8),得
(3-30)
斜面上的切应力由图3-16b 可直接得
(3-31)
应力张量的三个不变量为
则应力状态的特征方程为
于是,可求得主应力
(3-32)
由于σ3=0,平面应力状态下的主切应力为
(3-33)
需要特别指出,平面应力状态中z 方向虽然没有应力,但是有应变。只有在纯剪切时,没有应力的方向上才没有应变,纯切应力状态属平面应力状态的特殊情况。
2. 平面应变状态时的平面应力 变形物体在某一方向不发生变形,称为平面变形,其应力状态称为平面应变状态下的应力状态,发生变形的平面称塑性流平面。平面应变的应力状态特点是:1) 不产生变形的方向(设如图3-17所示的z 向)为主方向,与该方向垂直的平面上没有切应力,即τzx=τzy =0,因而σz 为主应力;2)在z 方向有阻止变形的正应力,其值为:对于弹性变形σz=ν(σx+σy),式中ν为泊松比,对于塑性变形,σz=(σx+σy)/2=σm(见本章第五节);3)所有应力分量沿z 轴均匀分布,即与z 轴无关,对z 的偏导数为零。
cos ;cos sin ;0
2l m n π?????
==-== ???cos sin cos sin x x xy x xy y yx y yx y S l m S l m στσ?τ?τστ?σ?=+=+=+=+()()22211cos 2sin 222x y xy x y x y xy l m lm
σσστσσσσ?τ?=++=++-+()1sin 2cos 22x y x y xy S m S l τσσ?τ?
=-=--122x y σσσσ+?=??1221122331
;222σσσστττ-=±==±=±
图3-17 平面应变的应力状态
平面应变状态下的应力张量可写成 在主轴坐标系时,为
式中,σm =12(σx +σy )=1
2(σ1+σ2)。由于式(3-34a )中的偏应力
12
2''2
x σσσσ-==-,σ’3=0,即为纯切应力状态,所以,平面变形时的应力状态
就是纯切应力状态叠加一个应力球张量。
平面应变状态的应力平衡微分方程、变形平面中斜面上的应力和主应力均与式(3-28)、(3-30)、(3-31)和(3-32)相同。平面应变状态的主切应力和最大切应力为
(3-35)
由式(3-35)可知,平面应变状态下最大切应力所在的平面与变形平面上的两个主平面交成450角,这是建立平面应变滑移线理论的重要依据。
0000x xy
ij yx y z στστσσ????==??????0202
000x y x y x y y x σστσστ-??
????-??-????????
??
000000m m m σσσ????+?????
?12120000002ij σσσσσ??????==????????+12
12002002
000σσσσ-??????-??-???????
???000000m
m m σσσ????+??????
(3-34) (3-34a) 12
12max 1
2
23312
4σσττσσττ-=±=-==±}
4 固态塑性变形物理本质 材料经过加工成形使其具有需要的形状和性能,才体现出它的价值。材料加工的目的就是两个:一是改变材料的形状,另一个是改善其性能。塑性变形是既改变材料的形状,又改变材料的组织结构及相应性能的有效方法。 通过塑性变形可以有效地改变材料的性能,材料的性能又直接影响到工艺的进行。金属材料的性能(包括使用性能和深加工性能)在使用条件一定时,是决定于成分和组织结构的。在材料的化学成分一定的情况下,其组织结构是由加工工艺决定的,既通过冷、热加工、热处理和形变热处理可以在很大范围内改变金属材料的组织结构,从而改变材料的性能。我们掌握了形变、相变、形变和相变相结合的过程中金属材料组织结构的变化规律,就可以利用这些规律,设计和优化加工工艺来获得满足性能要求所需要的组织结构。有时为了充分发挥冷、热加工、热处理和形变热处理改变金属材料的组织结构的作用,也经常适当地调整化学成分,从而获得更好的效果。这些知识是制定各种金属材料生产工艺的理论依据,为了达到有效的控制材料性能目的,我们首先要认识塑性加工过程中材料的组织及性能变化。 4.1 固态塑性变形机理 材料塑性变形包括晶内变形和晶间变形。通过各种位错运动而实现的晶内一部分相对于另一部分的剪切运动,这就是晶内变形。剪切运动有不同的机理,其中最基本的形式是:滑移、孪生、形变带和扭折带。在r T T 5.0>(r T 熔化温度)时,可能出现晶间变形。当 变形温度比晶体熔点低很多时,起控制作用的变形机理是滑移和孪生。在高温塑性变形时,扩散机理起重要作用。 在金属和合金的塑性变形过程中,常常同时有几种机理起作用。各种机理作用的情况受许多因素影响,例如:晶体结构、化学成分、相状态等材料的内在因素,及变形温度、变形速度、应力状态等外部条件的影响。因此要研究和控制材料的变形过程,掌握基本的塑性变形机理很有必要。 4.1.1 滑移 (1)点阵阻力 晶内变形是晶体的一部分相对于另一部分的剪切变形,都是通过位错运动来实现的,所以研究基本的塑性变形机理就应研究相应的各种位错运动形式。滑移是重要的切变机理之一。虽说位错的滑移运动是很容易的,但是,它也必须至少克服点阵阻力对它的阻碍才能运动。所谓点阵阻力也就是派一纳力。当位错从一个低能的稳定位置过渡到另一个低能的稳定位置,必须越过一个能量最大值的位置,就需要对位错施加足够的力以供克服这一能垒所需要的能量,这个能垒就称为派尔斯垒,克服这个能垒所需要的力就是派一纳力。 派尔斯等作者,在经典的弹性介质假设和滑移面上原子的相互作用为原子相对位移的正弦函数假设的基础上,求出了单位长度位错的激活能△W (即派尔斯垒)和其临界切应力(派一纳力)p τ,按指数规律随面间距 a 和柏氏矢量 b 的比值a /b 而变化。
弹性理论与塑性理论,弹性材料与塑性材料浅析 经过一学期,弹性与塑性力学这门课程的学习结束了。学习完弹性与塑性力学以后,我对弹性力学与塑性力学,弹性材料与塑性材料的区别与联系的认识进一步加深了。 首先谈一下有关弹性理论的基本知识。 弹性力学也称弹性理论,主要研究弹性体在外力作用或温度变化等外界因素下所产生的应力、应变和位移,从而解决结构或机械设计中所提出的强度和刚度问题。在研究对象上,弹性力学同材料力学和结构力学之间有一定的分工。材料力学基本上只研究杆状构件;结构力学主要是在材料力学的基础上研究杆状构件所组成的结构,即所谓杆件系统;而弹性力学研究包括杆状构件在内的各种形状的弹性体。弹性力学是固体力学的重要分支,它研究弹性物体在外力和其它外界因素作用下产生的变形和内力,也称为弹性理论。它是材料力学、结构力学、塑性力学和某些交叉学科的基础,广泛应用于建筑、机械、化工、航天等工程领域。弹性体是变形体的一种,它的特征为:在外力作用下物体变形,当外力不超过某一限度时,除去外力后物体即恢复原状。绝对弹性体是不存在的。物体在外力除去后的残余变形很小时,一般就把它当作弹性体处理。 弹性力学所依据的基本规律有三个:变形连续规律、应力-应变关系和运动(或平衡)规律,它们有时被称为弹性力学三大基本规律。弹性力学中许多定理、公式和结论等,都可以从三大基本规律推导出来。 连续变形规律是指弹性力学在考虑物体的变形时,只考虑经过连续变形后仍为连续的物体,如果物体中本来就有裂纹,则只考虑裂纹不扩展的情况。这里主要使用数学中的几何方程和位移边界条件等方面的知识。求解一个弹性力学问题,就是设法确定弹性体中各点的位移、应变和应力共15个函数。从理论上讲,只有15个函数全部确定后,问题才算解决。但在各种实际问题中,起主要作用的常常只是其中的几个函数,有时甚至只是物体的某些部位的某几个函数。所以常常用实验和数学相结合的方法,就可求解。 数学弹性力学的典型问题主要有一般性理论、柱体扭转和弯曲、平面问题、变截面轴扭转,回转体轴对称变形等方面。 在近代,经典的弹性理论得到了新的发展。例如,把切应力的成对性发展为极性物质弹性力学;把协调方程(保证物体变形后连续,各应变分量必须满足的关系)发展为非协调弹性力学;推广胡克定律,除机械运动本身外,还考虑其他运动形式和各种材科的物理方程称为本构方程。对于弹性体的某一点的本构方程,除考虑该点本身外还要考虑弹性体其他点对该点的影响,发展为非局部弹性力学等。 弹性力学的基本假定如下: 1.假定物体是连续的,就是假定整个物体的体积都被组成这个物体的介质所填满,不留下任何空隙。 2.假定物体是完全弹性的,就是假定物体完全服从胡克定律——应变与引起该应变的那个应力分量成比例。 3.假定物体是均匀的,就是整个物体是由同一材料组成的。 4.假定物体是各向同性的,就是物体内一点的弹性在所有各个方向都相同。5.假定位移和形变是微小的。 以下是塑性理论的基本知识:
弹塑性力学基础翻译■第七章 7、塑性 7.1介绍 两个基本因素控制弹性的发展,一个是加载过程的完全可逆性,当一个使物体产生应变的力消失,物体就立刻回到未加载力之前;第二个因素说明在荷载作用下物体的变形或者应变只取决于最终的应力,与加载过程和路径无关,因此弹性行为可以视为一个点函数,因为任何产生的应变可以通过初始应力、终了应力以及特定的比例常数来确定。但是当塑性或者永久变形产生时这两个因素就不明显了。 为了产生塑性变形或者塑性流,应力必须超过屈服应力。如果大大超过屈服应力,许多固体(比如延性金属)的变形或尺寸会一直打到一个很大的程度。另外,当最终应变形成,一个应变元可以通过不同的加
载方式使物体达到末状态,因此当荷载消失后不仅无法观测到像弹性一样的完全可逆现象,末状态也取决于荷载的加载过程而不只是初应力和末应力状态。这个发现意味着塑性变形是一个过程函数,需要增量应变在应变过程上的累积来确定总的应变。 在研究塑性的时候至少可以采取三种很明显 的方式。 1、在考虑应力应变分布满足规定的边界条件的情况下,通过材料的性质来建立理想模型。这个被称作宏观塑性理论,很类似于长久以来的弹性理论。 2、应用于金属物理学的方法。在这种方法中,实际固体中单晶体变形方式建立于研究的基础,通过一个物体内部联系从单晶体扩展到多晶体的聚集从而形成整个构件。这种方法通常被工程师运用。这个叫做微观塑性理论。 3、技术的方法。通过寻求某些现象学的规则,运用实验观察实际物体材料在宏观尺寸上的数学表达式。这确保在一般意义上的设计上可以预测材料的属性,这可能被叫做宏观工程塑性。这种方法在本章中是重点。 7.2弹性和塑性的比较为了方便,许多上述的说明被总结成表格的形式。在这种方式有个直接的比较,很
《金属塑性变形理论》习题集 张贵杰编 河北联合大学 金属材料与加工工程系 2013年10月
前言 《金属塑性变形理论》是关于金属塑性加工学科的基础理论课,也是“金属材料工程”专业大学本科生的主干课程,同时也是报考材料科学与工程专业方向硕士研究生的必考科目。 《金属塑性变形理论》总学时为72,内容上分为两部分,即“金属塑性加工力学”(40学时)和“塑性加工金属学”(32学时)。 为使学生能够学好本课,以奠定扎实的理论基础,提高分析问题和解决问题的能力,编者集20余年的教学经验特编制本习题集,一方面作为学生在学习本课程时的辅导材料,供课下消化课堂内容时使用,另一方面也可供任课教师在授课时参考,此外对报考研究生的学生还具有指导复习的作用。 本“习题集”在编写时,充分考虑了学科内容的系统性、学生学习的连贯性以及与教材顺序的一致性。该“习题集”中具有前后关联的一个个题目,带有由浅入深的启发性,能够引导学生将所学的知识不断深化。教师也可根据教学进程从中选题,作为课外作业指导学生进行练习。所有这些都会有助于学生理解和消化课堂上所学习的内容,从而提高课下的学习效率。 编者 2013年10月
第一部分 金属塑性加工力学 第一章 应力状态分析 1. 金属塑性加工中的外力有哪几种?其意义如何? 2. 为什么应力分量的表达需用双下标?每个下标都表示何物理意义? 3. 已知应力状态如图1-1所示,写出应力分量,并以张量形式表示。 4. 已知应力状态的六个分量7-=x σ,4-=xy τ,0=y σ,4=yz τ, 8-=zx τ,15-=z σ(MPa),画出应力状态图,写出应力张量。 5. 作出单向拉伸、单向压缩、三向等值压缩、平面应力、平面应变、 纯剪切应力状态的应力Mehr 圆。 6. 已知应力状态如图1-2所示,当斜面法线方向与三个坐标轴夹角余 弦31 ===n m l 时,求该斜面上的全应力S 、全应力在坐标轴上的 分量x S 、y S 、z S 及斜面上的法线应力n σ和切应力n τ。 图 1-1 ?? ?? ? ??------ =1548404847σT x y z 图 1-2 x 10
第十一章习题答案 11.3使用静力法和机动法求出图示超静定梁的极限载荷。 解1:( 1)静力法 首先该超静定梁(a )化为静定结构(b )、(c )。分别求出其弯矩图,然后叠 加,得该超静定梁的弯矩图(f ) 在极限情况下 M A M s , M B M s 设C 点支反力为R C ,贝U : R C 2l Pl 1 当P 值达到上述数值时,结构形成破坏机构,故 P 为该梁的完全解。 (2)机动法 设破坏机构如图(g ),并设B 点挠度为,则: C ,(2l l 1) 21 l 1 21 11 外力功W e P (I R c (2l h) M s 由上二式得 M p 41 l 1 2l l 1 l 1 k ——
41 l 内力功 W i M AA M B B —M l 1 21 l 1 由W e W ,可得极限载荷上限为 4l l i l i 2l l i 由于在P 作用下,M s M x M s ,故上式所示载荷为完全解的极限载荷。 解2:( 1)静力法 先将该超静定梁化为静定梁(b )、(c ),分别作弯矩图,叠加得该超静定梁的 弯矩图(f ) 设A 点为坐标原点,此时弯矩方程为: M x R B l x 在极限状态时,有 M s x x-1 ,M x 1 M s 令dM X dx 0 得 q(l X i ) R B 而 R B l iql 2 1 2q (1)、(2)、(3)得 M s 2 l R B l X i 联立解 2qM s i i ql M s M s (1) (2) (3) 解得q ii2 i44 i6 M s l 2
在以上q0值作用下,梁已形成破坏机构,故其解为完全解 (2)机动法如图(g) 设在A、C两点形成塑性铰A B 内力功为 外力功为 由虚功原理W i W 该解与完全解的误差为 3% q 解3:(1)静力法 设坐标原点在C点,此时弯矩方程为: BC 段(0 x L 2)M (x) R c x qx2 1 1 AB段(L 2 x l)M (x)&X - ql x T 2 4 取较大的值,可得q011.66 处,M为极大值,设在BC段,由 dM x dx 得R c q 0 R c q (1) M s M s g2 3M s l W e 2 02q x dx 4q 得:q 12M s q0 11.66^ l2 b ----------- ----------------- H
金属塑性变形原理 1、变形和应力 1.1塑性变形与弹性变形 金属晶格在受力时发生歪扭或拉长,当外力未超过原子之间的结合力时,去掉外力之后晶格便会由变形的状态恢复到原始状态,也就是说,未超过金属本身弹性极限的变形叫金属的弹性变形。多晶体发生弹性变形时,各个晶粒的受力状态是不均匀的。 当加在晶体上的外力超过其弹性极限时,去掉外力之后歪扭的晶格和破碎的晶体不能恢复到原始状态,这种永久变形叫金属的塑性变形。金属发生塑性变形必然引起金属晶体组织结构的破坏,使晶格发生歪扭和紊乱,使晶粒破碎并且使晶粒形状发生变化,一般晶粒沿着受力方向被拉长或压缩。 1.2应力和应力集中 塑性变形时,作用于金属上的外力有作用力和反作用力。由于这两种外力的作用,在金属内部将产生与外力大小相平衡的内力。单位面积上的这种内力称为应力,以σ表示。 σ=P/S 式中σ——物体产生的应力,MPa: P——作用于物体的外力,N; S——承受外力作用的物体面积,mm2。 当金属内部存在应力,其表面又有尖角、尖缺口、结疤、折叠、划伤、裂纹等缺陷存在时,应力将在这些缺陷处集中分布,使这些缺陷部位的实际应力比正常应力高数倍。这种现象叫做应力集中。 金属内部的气泡、缩孔、裂纹、夹杂物及残余应力等对应力的反应与物体的表面缺陷相同,在应力作用下,也会发生应力集中。 应力集中在很大程度上提高了金属的变形抗力,降低了金属的塑性,金属的破坏往往最先从应力集中的地方开始。 2、塑性变形基本定律 2.1体积不变定律 钢锭在头几道轧制中因其缩孔、疏松、气泡、裂纹等缺陷受压缩而致密,体积有所减少,此后各轧制道次的金属体积就不再发生变化。这种轧制前后体积不变的客观事实叫做体积不变定律。它是计算轧制变形前后的轧件尺寸的基本依据。 H、B、L——轧制前轧件的高、宽、长;h、b、l——轧制后轧件的高、宽、长。根据体积不变定律,轧件轧制前后体积相等,即 HBL=hbl 2.2最小阻力定律 钢在塑性变形时,金属沿着变形抵抗力最小的方向流动,这就叫做最小阻力定律。根据这个定律,在自由变形的情况下,金属的流动总是取最短的路线,因为最短的路线抵抗变形的阻力最小,这个最短的路线,即是从该动点到断面周界的垂线。
第二章 2.1(曾海斌)物体上某点的应力张量σij 为σij =?? ?? ??????1003100031001000000 (应力单位) 求出: (a )面积单位上应力矢量的大小,该面元上的法线矢量为n =(1/2,1/2,1/2); (b )应力主轴的方位; (c )主应力的大小; (d )八面体应力的大小; (e )最大剪应力的大小。 解答: (a)利用式(2.26)计算应力矢量的分量n T i ,得 n T 1=σ1j n j =σ11n 1+σ12n 2 +σ13n 3 = 0 ;同样 n T 2= j n j =272.47 n T 3=σ3j n j =157.31 所以,应力矢量n T 的大小为 =n T [(n T 1 )2 +(n T 2 )2 +(n T 3)2]1/2=314.62 (b)(c)特征方程:σ3—I 1σ2 + I 2σ—I 3=0 其中I 1 =σij 的对角项之和、I 2 =σij 的对角项余子式之和、I 3 =σij 的行列式。 从一个三次方程的根的特征性可证明: I 1 =σ1+σ2+σ3 I 2=σ1σ2+σ2σ3+σ3σ1 I 3=σ1σ2σ3 其中得,σ1=400、σ2=σ3=0 是特征方程的根。 将σ1、σ2和σ3分别代入(2.43),并使用恒等式n 12+ n 22 + n 32=1 可决定对应于主应力每个值的单位法线n i 的分量(n 1 、n 2 、n 3): n i (1)=(0, ±0.866,±0.5) n i (2)=(0, μ0.5,±0.866) n i (3)=(±1, 0,0) 注意主方向2和3不是唯一的,可以选用与轴1正交的任何两个相互垂直的轴。 (d )由式(2.96),可算 σotc =1/3(0+100+300)=133.3 τotc =1/3(90000+40000+10000+6*30000) 1/2=188.56 (e) 已经求得σ1=400、σ2=σ3=0,则有(2.91)给出的最大剪应力为τmax =200
金属塑性成形原理》 习题答案 一、填空题 1. 衡量金属或合金的塑性变形能力的数量指标有伸长率和断面收缩率。 2. 所谓金属的再结晶是指冷变形金属加热到更高的温度后,在原来变形的金属中会重新形成新的无畸变的等轴晶,直至完全取代金属的冷变形组织的过程。 3. 金属热塑性变形机理主要有:晶内滑移、晶内孪生、晶界滑移和扩散蠕变等。 4. 请将以下应力张量分解为应力球张量和应力偏张量 5. 对应变张量,请写出其八面体线变与八面体切应变的表达式。 =
6.1864 年法国工程师屈雷斯加( H.Tresca )根据库伦在土力学中研究成果, 并从他自已所做的金属挤压试验,提出材料的屈服与最大切应力有关,如果 采用数学的方式,屈雷斯加屈服条件可表述为 。 7. 金属塑性成形过程中影响摩擦系数的因素有很多, 归结起来主要有 金属的 种类和 化学成分 、 工具的表面状态 、 接触面上的单位压力 、 变形温度 、 变形速度 等几方面的因素。 8. 变形体处于塑性平面应变状态时,在塑性流动平面上滑移线上任一点的切 线方向即 为该点的最大切应力方向。对于理想刚塑性材料处于平面应变状态 下,塑性区内各点的应力状态不同其实质只是 平均应力 不同,而各点处 的 最大切应力 为材料常数。 9. 在众多的静可容应力场和动可容速度场中,必然有一个应力场和与之对应 的速度 场,它们满足全部的静可容和动可容条件,此唯一的应力场和速度场, 称之为 真实 应力场和 真实 速度场,由此导出的载荷,即为 真实 载荷, 它是唯一的。 10. 设平面三角形单元内部任意点的位移采用如下的线性多项式来表示: 11、金属塑性成形有如下特点: 、 、 、 12、按照成形的特点,一般将塑性成形分为 和 两大类,按 照成形时工件的温度还可以分为 、 和 三类。 13、金属的超塑性分为 和 两大类。 14、晶内变形的主要方式和单晶体一样分为 和 。 其中 变形是主要的,而 变形是次要的,一般仅起调节作用。 ,则单元内任一点外的应变可表示为
"塑性变形力学基础与轧制原理" 参考书:"塑性变形力力学基础及轧制及原理"曹鸿德等主编,机械工业出版社。 学生应掌握的主要内容: 点的应力状态的张量性质:已知主方向和主应力,求斜面应力:画出主应力图示;写出主应力平面的方向余弦,主切应力平面的法应力, 主切应力;什么是八面体平面,写出八面体平面法向应力及剪应力分式:写出平衡微分方程式;推导体积应力及不可压缩性条件,画出主应变图示:试述均匀变形的定义和特点,对数应变系数和条件应变系数的关系;试述塑性表面的概念;试述最大剪应力等于常值的塑性条件,写出公式:试述单位弹性形态改变势能等于常值的塑性条件,写出公式:试述两个塑性条件的差别和联系。 试述平面问题的概念,写出平面问题的方程式:如何选定滑移线的参变量和确定滑移线的方向,对简单的实际问题能给出滑移线的正方向:推导汉基积分(4一17)式及(4一18)式:试述滑移线的几何性质;证明汉基第一定理(画图):画出窄锤头冲压厚板时的滑移线场,并求解单位压力 P;试述何为几何可能位移和静力可能的屈服应力状态;求各种典型压力加工情况的上限解。 试述在平面镦粗和轧制时的单位摩擦力的分布规律;推导卡尔曼近似平衡微分方程式(6-46)及单位压力基本平衡微分方程式(4-49)并分析求解此方程式的基本方法;推导奥洛万近似的平衡微分方程式(6 -69);画图说明各种因素对单位压力的影响;导出计算咬入角及变形区 长度的公式;试述中性角的概念;前滑的概念及前滑公式,如何测定前滑系数;写出轧件的工程常用变形系数;试述位移体积的概念及导出其表达式,导出以对数变形系数表示的体积不变条件;简述变形抗力的概念;简述各种因素对变形抗力的影响,了解强化强度,变形速度的概念;试述滑动摩擦的种类及概念,基本滑动摩擦机理;导出斯通公式;阐述轧机传动力矩的组成及概念;画图说明在简单轧制,带张力轧制及单辊传动时金属对轧辊作用力的方向。
塑性力学与弹性力学的区别与联系固体力学就是研究固体材料及其构成的物体结构在外部干扰(荷载、温度变化等)下的力学响应的科学,按其研究对象区分为不同的科学分支。塑性力学、弹性力学正就是固体力学中的两个重要分支。 弹性力学就是研究固体材料及由其构成的物体结构在弹性变形阶段的力学行为,包括在外部干扰下弹性物体的内力(应力)、变形(应变)与位移的分布,以及与之相关的原理、理论与方法;塑性力学则研究它们在塑性变形阶段的力学响应。 大多数材料都同时具有弹性与塑性性质,当外载较小时,材料呈现为弹性的或基本上就是弹性的;当载荷渐增时,材料将进入塑性变形阶段,即材料的行为呈现为塑性的。所谓弹性与塑性,只就是材料力学性质的流变学分类法中两个典型性质或理想模型;同一种材料在不同条件下可以主要表现为弹性的或塑性的。因此,所谓弹性材料或弹性物体就是指在—定条件下主要呈现弹性性态的材料或物体。塑性材料或塑性物体的含义与此相类。如上所述。大多数材料往往都同时具有弹性与塑性性质,特别就是在塑性变形阶段,变形中既有可恢复的弹性变形,又有不可恢复的塑性变形,因此有时又称为弹塑性材料。本书主要介绍分析弹塑性材料与结构在外部干扰下力学响应的基本原理、理论与方法。以及相应的“破坏”准则或失效难则。 塑性力学与弹性力学的区别在于,塑性力学考虑物体内产生的永久变形,而弹性力学不考虑;与流变学的区别在于,塑性力学考虑的永久变形只与应力与应变的历史有关,而不随时间变化,而流变学考虑的永久变形则与时间有关。 一、基本假定 1、弹性力学: (1)假设物体就是连续的。就就是说物体整个体积内,都被组成这种物体的物质填满,不留任何空隙。这样,物体内的一些物理量,例如:应力、应变、位移等,才可以用坐标的连续函数表示。 (2)假设物体就是线弹性的。就就是说当使物体产生变形的外力被除去以后,物体能够完全恢复原来形状,不留任何残余变形。而且,材料服从虎克定律,应力与应变成正比。 (3)假设物体就是均匀的。就就是说整个物体就是由同一种质地均匀的材料组成的。这样,整个物体的所有部分才具有相同的物理性质,因而物体的弹性模量与泊松比才不随位置坐标而变。 (4)假设物体就是各向同性的。也就就是物体内每一点各个不同方向的物理性质与机械性质都就是相同的。 2、塑性力学: (1)材料就是连续的,均匀的。 (2)平均正应力(静水压力)不影响屈服条件与加载条件。 (3)体积的变化就是弹性的。 (4)不考虑时间因素对材料性质的影响。 二、基本内容 (一)弹性力学 弹性力学问题的求解主要就是基于以下几个理论基础。 1、Newton定律 弹性力学就是一门力学,它服从Newton所提出的三大定律,即惯性定律﹑运动定律,以及作用与反作用定律。质点力学与刚体力学就是从Newton定律演绎出来的,而弹性力学不同于理论力学,它还有新假设与新定律。
弹塑性力学考试
————————————————————————————————作者:————————————————————————————————日期:
二、填空题:(每空2分,共8分) 1、在表征确定一点应力状态时,只需该点应力状态的-------个独立的应力分量,它们分别是-------。(参照oxyz直角坐标系)。 2、在弹塑性力学应力理论中,联系应力分量与体力分量间关系的表达式叫---------方程,它的缩写式为-------。 三、选择题(每小题有四个答案,请选择一个正确的结果。每小题4分,共16分。) 1、试根据由脆性材料制成的封闭圆柱形薄壁容器,受均匀内压作用,当压力过大时,容器出现破裂。裂纹展布的方向是:_________。 A、沿圆柱纵向(轴向) B、沿圆柱横向(环向) C、与纵向呈45°角 D、与纵向呈30°角 2、金属薄板受单轴向拉伸,板中有一穿透形小圆孔。该板危险点的最大拉应力是无孔板最大拉应力__________倍。 A、2 B、3 C、4 D、5 3、若物体中某一点之位移u、v、w均为零(u、v、w分别为物体内一点,沿x、y、z直角坐标系三轴线方向上的位移分量。)则在该点处的应变_________。 A、一定不为零 B、一定为零 C、可能为零 D、不能确定 4、以下________表示一个二阶张量。 A、B、C、D、 四、试根据下标记号法和求和约定展开下列各式:(共8分) 1、;(i ,j = 1,2,3 ); 2、; 五、计算题(共计64分。) 1、试说明下列应变状态是否可能存在: ;() 上式中c为已知常数,且。 2、已知一受力物体中某点的应力状态为:
第三章金属塑性变形的力学基础 金属在外力作用下由弹性状态进入塑性状态,研究金属在塑性状态下的力学行为称为塑性理论或塑性力学,它是连续介质的一个力学分支。为了简化研究过程,塑性理论通常采用以下假设: 1)变形体是连续的,即整个变形体内不存在任何空隙。这样,应力、应变、位移等物理量也都是连续的,并可用坐标的连续函数来表示。 2)变形体是均质的和各向同性的。这样,从变形体上切取的任一微元体都能保持原变形体所具有的物理性质,且不随坐标的改变而变化。 3)在变形的任意瞬间,力的作用是平衡的。 4)在一般情况下,忽略体积力的影响。 5)在变形的任意瞬间,体积不变。 在塑性理论中,分析问题需要从静力学、几何学和物理学等角度来考虑。静力学角度是从变形体中质点的应力分析出发,根据静力学平衡条件导出该点附近各应力分量之间的关系式,即平衡微分方程。几何学角度是根据变形体的连续性和均匀性,用几何的方法导出应变分量与位移分量之间的关系式,即几何方程。物理学角度是根据实验与假设导出应变分量与应力分量之间的关系式。此外,还要建立变形体从弹性状态进入塑性状态并使塑性变形继续进行时,其应力分量与材料性能之间的关系,即屈服准则或塑性条件。 以上是塑性变形的力学基础,也是本章的主要内容。它为研究塑性成形力学问题提供基础理论。 第一节金属塑性成形过程的受力分析 塑性成形是利用金属的塑性,在外力作用下使金属成形的一种加工方法。作用于金属的外力可以分为两类:一类是作用在金属表面上的力,称为面力或接触力,它可以是集中力,但更一般的是分布力;第二类是作用在金属每个质点上的力,称为体积力。 1. 面力 面力可分为作用力、反作用力和摩擦力。 作用力是由塑性加工设备提供的,用于使金属坯料产生塑性变形。在不同的塑性加工工序中,作用力可以是压力、拉力或剪切力,但在多数情况下是用压力来成形的,因此塑性加工又称为压力加工。 反作用力是工具反作用于金属坯料的力。一般情况下,反作用于金属的力与施加的作用力互相平行,并组成平衡力系,如图3-1a中,F=F’(F—作用力、F’—反作用力)。而在图2-1b、c中,反作用力F’’自相平衡。 a)b)c)
考试科目 :弹塑性力学试题 班号 研 班 姓名 成绩 一、概念题 (1) 最小势能原理等价于弹性力学平衡微分方程和静力边界条件,用最小势能原理求解弹性力学近似解时,仅要求位移函数满足已知位移边界条件。 (2) 最小余能原理等价于 应变协调 方程和 位移 边界条件,用最小余能原理求解弹性力学近似解时,所设的应力分量应预先满足平衡微分方程 和静力边界条件。 (3) 弹性力学问题有位移法和应力法两种基本解法,前者以位移为基本未知量,后者以 应力为基本未知量。 二、已知轴对称的平面应变问题,应力和位移分量的一般解为: ,)11(2)11(10,2,222 2=?? ????--+-+--==+-=+= θθθμμμμμτσσu Cr r A E u C r A C r A r r r 利用上述解答求厚壁圆筒外面套以绝对刚性的外管,厚壁圆筒承受内压p 作用,试求该问题的应力和位移分量的解。 解:边界条件为: a r =时:p r -=σ;0=θτr b r =时:0=r u ;0=θu 。 将上述边界条件代入公式得: ??? ? ???=?????--+-+--=-=+=0)11(2)11(122 2μμμμb C b A E u p C a A b r r 解上述方程组得: ()()()??? ? ???+-- =+---=]21[22121222 2222a b pa C a b b pa A μμμ 则该问题的应力和位移分量的解分别为:
()()()()()()??? ???? ? ? ??? ???=?? ???????? ??---+-???? ??-+-+--==+--+--=+--+---=??011)]21([11)]21([)21(10 21121212112121222222 222 22 222222 22 22222θθθμμμμμμμμτμμμσμμμσu b a pra b a r b pa E u a b pa r a b b pa a b pa r a b b pa r r r 三、已知弹性半平面的o 点受集中力 2 2222 222 2 223 )(2)(2)(2y x y x P y x xy P y x x P xy y x +- =+- =+- =πτπσπσ 利用上述解答求在弹性半平面上作用着n 个集中力i p 构成的力系, 这些力到所设原点的距离分别为i y ,试求应力xy y x τσσ,,的一般表达式。 解:由题设条件知,第i 个力i p 在点(x ,y )处产生的应力将为: y y
习题 1. 用文字或简图解释下列名词: 金属键单晶体多晶体 晶面晶向晶面族 晶向族晶面指数晶向指数 空位间隙原子位错 位错线刃型位错螺型位错 亚结构滑移面滑移方向 滑移线滑移带滑移系 临界剪切应力软位向硬位向 几何硬化双晶面双晶带 纤维组织变形织构加工硬化 多边形化冷变形热变形 不完全的冷变形不完全的热变形三类附加应力 残余应力 2. 金属晶体内的原于排列,是怎样处于稳定状态的?试以双原子作用模型来解释。 3. 试就图2.58立方晶胞中的指定晶面,建立坐标写出晶面指数? 4. 试就图2.59立方晶胞中的指定晶向,建立坐标写出晶向指数。 5. 试就图2.60密排六方晶胞中的指定晶面,建立坐标,写出晶面指数。 6. 试就图2.61密排六方晶跑中的指定晶向,建立坐标,写出晶向指数。
7. 试图示立方晶胞的(100)、(012)等晶面。 8. 试图示立方晶胞的[111]、[112]等晶向。 9. 试图示密排六方晶胞的(1010)、(1010)、[1012]等晶面或晶向。 10. 在立方晶格和六方晶格中怎样判别互相垂直或互相平行的晶向和晶面?试举例并图示说明。 11. 单晶体中塑性变形时沿什么样的晶面和晶向容易发生滑移?说明原因。 12. 晶胞的滑移系总数怎么计算?试具体算一下体心立方、面心立方和密排六方晶胞 的滑移系数,三种晶胞的塑性何者第一? 何者第二? 何者最差?为什么? 13. 试推导出单晶体受拉伸时计算临界剪切应力的公式。试就公式说明什么条件下 单晶体的屈服极限σs最小?多晶体的屈服极限和单晶体的屈服极限相比较有什么不同? 14. 试说明晶体滑移的机理(提示:用位错运动解释)。 15. 单晶体在抗伸和压缩变形时,滑移面分别怎样转向?图示说明。 16. 多晶体的塑性变形有哪几种方式?有什么特点? 17. 晶界的强度和硬度在室温条件下怎样?高温条件下怎样?为什么? 18. 室温条件下晶粒大小对金属材料的强度、硬度和塑性有什么影响?为什么?试从 材料微观组织的变化说明加工硬化的原因。 19. 说明回复的温度、回复的机理、回复在生产上的应用。 20. 说明再结晶的温度、再结晶的机理、再结晶在生产上的应用。 21. 什么是二次再结晶(集合再结晶)?什么条件下容易产生?对金属的机械性能有什 么影响?锻压工艺过程中怎样避免? 22. 什么是板料冲压中产生的“桔皮”现象?原因是什么? 23. 什么是板料拉深中产生的“制耳”?原因是什么? 24. 变形程度大小对再结晶后晶粒度有怎样的影响?说明原因。 25. 什么是静态的和动态的再结晶全图?再结晶全图在锻压生产工艺上有什么用处? 锻造时怎样控制锻件的晶粒度? 26. 制件中有残余应力有什么危害性?怎样消除残余应力?
塑性力学和弹性力学的区别和联系固体力学是研究固体材料及其构成的物体结构在外部干扰(荷载、温度变化等)下的力学响应的科学,按其研究对象区分为不同的科学分支。塑性力学、弹性力学正是固体力学中的两个重要分支。 弹性力学是研究固体材料及由其构成的物体结构在弹性变形阶段的力学行为,包括在外部干扰下弹性物体的内力(应力)、变形(应变)和位移的分布,以及与之相关的原理、理论和方法;塑性力学则研究它们在塑性变形阶段的力学响应。 大多数材料都同时具有弹性和塑性性质,当外载较小时,材料呈现为弹性的或基本上是弹性的;当载荷渐增时,材料将进入塑性变形阶段,即材料的行为呈现为塑性的。所谓弹性和塑性,只是材料力学性质的流变学分类法中两个典型性质或理想模型;同一种材料在不同条件下可以主要表现为弹性的或塑性的。因此,所谓弹性材料或弹性物体是指在—定条件下主要呈现弹性性态的材料或物体。塑性材料或塑性物体的含义与此相类。如上所述。大多数材料往往都同时具有弹性和塑性性质,特别是在塑性变形阶段,变形中既有可恢复的弹性变形,又有不可恢复的塑性变形,因此有时又称为弹塑性材料。本书主要介绍分析弹塑性材料和结构在外部干扰下力学响应的基本原理、理论和方法。以及相应的“破坏”准则或失效难则。 塑性力学和弹性力学的区别在于,塑性力学考虑物体内产生的永久变形,而弹性力学不考虑;和流变学的区别在于,塑性力学考虑的永久变形只与应力和应变的历史有关,而不随时间变化,而流变学考虑的永久变形则与时间有关。 一、基本假定 1、弹性力学: (1)假设物体是连续的。就是说物体整个体积内,都被组成这种物体的物质填满,不留任何空隙。这样,物体内的一些物理量,例如:应力、应变、位移等,才可以用坐标的连续函数表示。 (2)假设物体是线弹性的。就是说当使物体产生变形的外力被除去以后,物体能够完全恢复原来形状,不留任何残余变形。而且,材料服从虎克定律,应力与应变成正比。 (3)假设物体是均匀的。就是说整个物体是由同一种质地均匀的材料组成的。这样,整个物体的所有部分才具有相同的物理性质,因而物体的弹性模量和泊松比才不随位置坐标而变。 (4)假设物体是各向同性的。也就是物体内每一点各个不同方向的物理性质和机械性质都是相同的。 2、塑性力学: (1)材料是连续的,均匀的。 (2)平均正应力(静水压力)不影响屈服条件和加载条件。 (3)体积的变化是弹性的。 (4)不考虑时间因素对材料性质的影响。 二、基本内容 (一)弹性力学 弹性力学问题的求解主要是基于以下几个理论基础。 1.Newton定律 弹性力学是一门力学,它服从Newton所提出的三大定律,即惯性定律﹑运动定律,以及作用与反作用定律。质点力学和刚体力学是从Newton定律演绎出来的,而弹性力学不同
弹塑性力学基本理论及应用 刘士光著 华中科技大学
第一章绪论 1.1弹塑性力学的任务 固体力学是研究固体材料及其构成的物体结构在外部干扰(载荷、温度交化等)下的力学响应的科学,按其研究对象区分为不同的学科分支。弹性力学和塑性力学是固体力学的两个重要分支。弹性力学是研究固体材料及由其构成的物体结构在弹性变形阶段的力学行为,包括在外部干扰下弹性物体的内力(应力)、变形(应变)和位移的分布,以及与之相关的原理、理论和方法;塑性力学则研究它们在塑性变形阶段的力学响应。大多数材料都同时具有弹性和塑性性质,当外载较小时,材料呈现为弹性的或基本上是弹性的;当载荷渐增时,材料将进入塑性变形阶段,即材料的行为呈现为塑性的。所谓弹性和塑性,只是材料力学性质的流变学分类法中两个典型性质或理想模型;同一种材料在不同条件下可以主要表现为弹性的或塑性的。因此,所谓弹性材料或弹性物体是指在—定条件下主要呈现弹性性态的材料或物体。塑性材料或塑性物体的含义与此相类。如上所述。大多数材料往往都同时具有弹性和塑性性质,特别是在塑性变形阶段,变形中既有可恢复的弹性变形,又有不可恢复的塑性变形,因此有时又称为弹塑性材料。本书主要介绍分析弹塑性材料和结构在外部干扰下力学响应的基本原理、理论和方法。以及相应的“破坏”准则或失效准则。 以弹性分析为基础的结构设计是假定材料为理想弹性,相应于这种设计观点就以分析结果的实际适用范作为设计的失效准则,即认为应力(严柞地说是应力的某一函数值)到达一定限值(弹性界限),将进入塑性变形阶段时、材料将破坏。结构中如果有一处或—部分材料“破坏”,则认为结构失效(丧失设计所规定的效用)。由于一般的结构都处于非均匀受力状态,当高应力点或高应力区的材料到达弹性界限时,类他的大部分材料仍处于弹性界限之内;而实际材料在应力超过弹性界限以后并不实际发生破坏,仍具有一定的继续承受应力(载荷)的能力,只 不过刚度相对地降低。因此弹性设计方法不能充分发挥材料的潜力,导致材料的某种浪费。实际上,当结构内的局部材料进入塑性变形阶段,在继续增加外载荷时,结构的内力(应力)分布规律与弹性阶段不同,即所谓内力(应力)重分布,这种重分布总的是使内力(应力)分布更趋均匀,使原来处于低应力区的材料承受更大的应力,从而更好地发挥材料的潜力,提高结构的承载能力。显然,以塑性分析为基础的设计比弹性设计更为优越。但是,塑性设计允许结构有更大约变形,
、弹性和塑性的概念 可变形固体在外力作用下将发生变形。根据变形的特点,固体在受力过程中的力学行为可分为两个明显不同的阶段: 当外力小于某一限值(通常称之为弹性极限荷载)时,在引起变形的外力卸除后,固体能完全恢复原来的形状,这种能恢复的变形称为弹性变形,固体只产生弹性变形的阶段称为弹性阶段;当外力一旦超过弹性极限荷载时,这时再卸除荷载,固体也不能恢复原状,其中有一部分不能消失的变形被保留下来,这种保留下来的永久变形就称为塑性变形,这一阶段称为塑性阶段。 根据上述固体受力变形的特点,所谓弹性,就定义为固体在去掉外力后恢复原来形状的性质;而所谓塑性,则定义为在去掉外力后不能恢复原来形状的性质。弹性(Elasticity)”和塑性(Plasticity)”是可变形固体的基本属性,两者的主要区别在于以下两个方面:1)变形是否可恢复: 弹性变形是可以完全恢复的,即弹性变形过程是一个可逆的过程;塑性....... 变形则是不可恢复的,塑性变形过程是一个不可逆的过程。 2)应力和应变之间是否一一对应: 在弹性阶段,应力和应变之间存在一一对应的单值函数关............. 系,而且通常还假设是线性关系;在塑性阶段,应力和应变之间通常不存 在一一对应的关系,而且是非线性关系(这种非线性称为物理非线性)。 工程中,常把脆性和韧性也作为一对概念来讲,它们之间的区别在于固体破坏时的变形大小,若变形很小就破坏,这种性质称为脆性;能够经受很大变形才破坏的,称为韧性或延性。 通常,脆性固体的塑性变形能力差,而韧性固体的塑性变形能力强。 二、弹塑性力学的研究对象及其简化模型
弹塑性力学是固体力学的一个分支学科,它由弹性理论和塑性理论组成。弹性理论研究理想弹性体在弹性阶段的力学问题,塑性理论研究经过抽象处理后的可变形固体在塑性阶段的力学问题。因此,弹塑性力学就是研究经过抽象化的可变形固体,从弹性阶段到塑性阶段、直至最后破坏的整个过程的力学问题。 构成实际固体的材料种类很多,它们的性质各有差异,为便于研究,往往根据材料的主要性质做出某些假设,忽略一些次要因素,将它抽象为理想的“模型”。在弹性理论中,实际固体即被抽象为所谓的“ 理想弹性体”,它是一个近似于真实固体的简化模型。“理想弹性”的特征是: 在一定的温度下,应力和应变之间存在一一对应的关系,而且与加载过程无关,与时间无关。 在塑性理论中,由于实际固体材料在塑性阶段的应力-应变关系过于复杂,若采用它进行理论研究和计算都非常复杂,因此,同样需要进行简化处理。常用的简化模型可分为两类,即理想塑性模型和强化模型。 1.理想塑性模型 在单向应力状态下,理想塑性模型的特征如图 0.1 所示。理想塑性模型又分为理想弹塑性模型和理想刚塑性模型。当所研究的问题具有明显的弹性变形时,常采用理想弹塑性模型。 在总变形较大、而且弹性变形部分远小于塑性变形部分时,为简化计算,常常忽略弹性变形部分,而采用理想刚塑性模型;另外,在计算结构塑性极限荷载时,也常采用理想刚塑性模型。 2.强化模型 在单向应力状态下,强化模型的特征如图 0.2 所示。强化模型又分为线性强化弹塑性模型、线性强化刚塑性模型和幂次强化模型三种。
弹塑性力学大作业 姓名:张喻捷学号:S201304069 邮箱:zjyfan@https://www.doczj.com/doc/9513226629.html, 一、岩土类材料和金属材料的联系区别 1、金属是人工形成的晶体材料,而岩土类材料是由颗粒组成的多相体,是天然形成的,也称为多相体的摩擦型材料。岩土类材料抗压不抗拉(抗拉压不等性),而金属材料既可以承受拉力也可以承受压力。 2、在一定范围内,岩土类材料抗剪强度和刚度随压应力的增大而增大,这种特性可称为岩土的压硬性。岩土的抗剪强度不仅由粘结力产生,而且由内摩擦角产生。这是因为岩土由颗粒材料堆积或胶结而成,属于摩擦型材料,因而它的抗剪强度与内摩擦角及压应力有关,而金属材料不具这种特性,抗剪强度与压应力无关。 3、岩土为多相材料,岩土颗粒中含有孔隙,因而在各向等压作用下,岩土颗粒中的水、气排出,就能产生塑性体变,出现屈服,而金属材料在等压作用下是不会产生体变,实际上,金属材料的屈服由剪切应力控制,与静水压力无关。这种持性可称为岩土的等压屈服特性。 4、在压力不太大的情况下,体积应变实际上与静水压力呈线性关系,对于金属材料,可以认为体积变化基本上是弹性的,除去静水压力后的体积变形可以完全恢复,没有残余的体积变形,即塑性变形不受静水压力影响。但对于岩土类材料,静水压力对屈服应力和塑性变形的大小都有明显的影响,不能忽略。 5、岩土的体应变与剪应力有关,即剪应力作用下,岩土材料会产生塑性体应变(膨胀或收缩),即岩土的剪胀性(包含剪缩性)。反之,岩土的剪应变也与平均应力有关,在平均压应力作用下引起负剪切变形,导致刚度增大,这也是压硬性的一种表现,而金属材料不存在这种特性。 6、岩土具有双强度特征。由于岩土存在粘聚力和摩擦力,从而显示岩土具有双强度特征,而与金属材料显然不同。两种强度的发挥与消散决定了岩土类材料的硬化与软化。 7、岩土类材料和金属材料的力学单元不同。金属连续介质材料的微单元,球应力只产生球应变,偏应力只产生偏应变;而颗粒摩擦材料微单元中,球张量和偏张量存在交叉影响。 8、虽然金属材料是各项同性材料,但通过一定的修正,金属材料塑性理论的概念也适用于岩土类塑性材料。