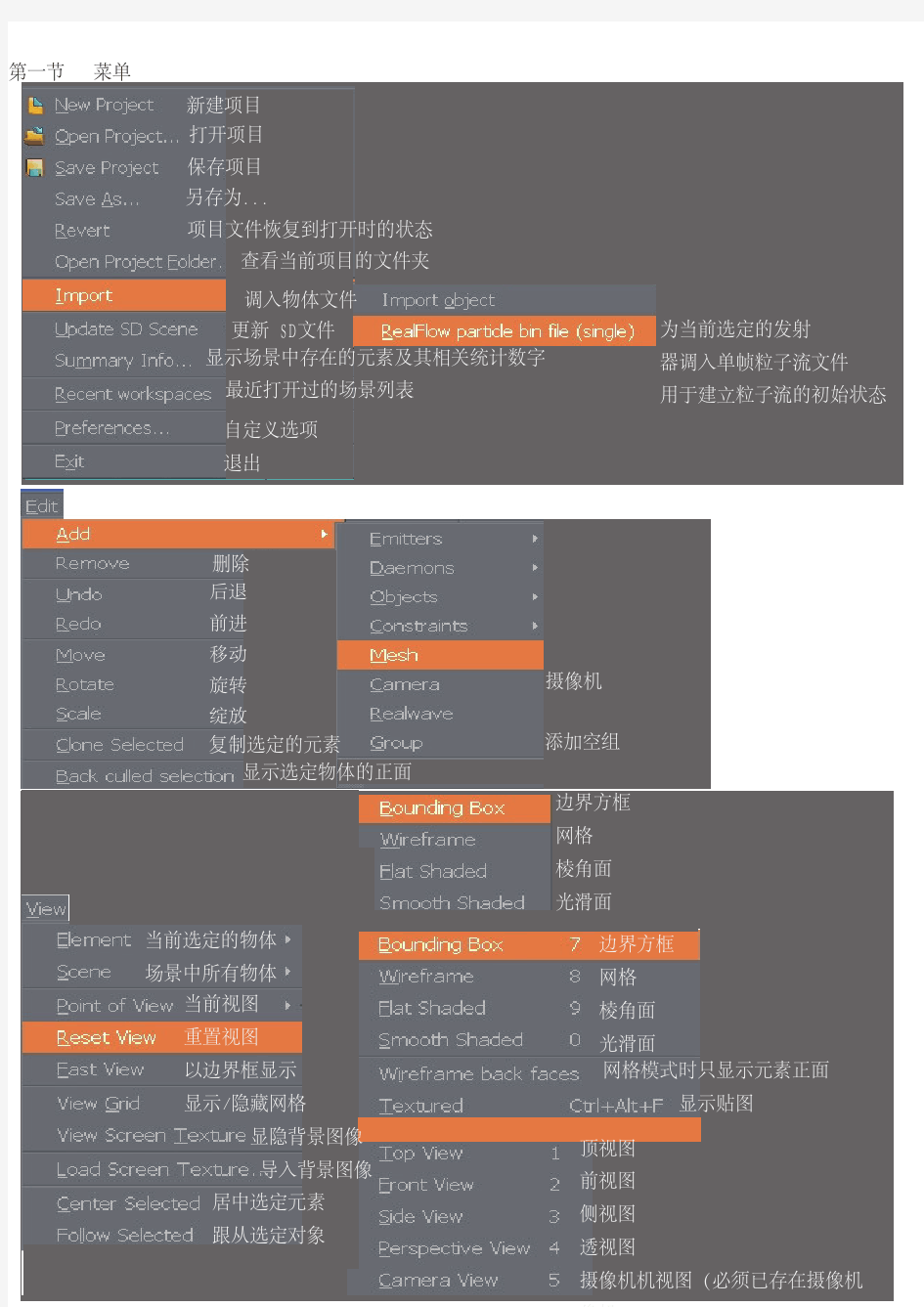
第一节 菜单
新建项目打开项目保存项目另存为...
项目文件恢复到打开时的状态
查看当前项目的文件夹调入物体文件
为当前选定的发射器调入单帧粒子流文件用于建立粒子流的初始状态
更新 SD文件
显示场景中存在的元素及其相关统计数字最近打开过的场景列表自定义选项退出
摄像机删除
后退前进移动旋转绽放
复制选定的元素
显示选定物体的正面
添加空组边界方框网格棱角面光滑面
当前选定的物体场景中所有物体
边界方框网格棱角面
光滑面
网格模式时只显示元素正面 显示贴图顶视图前视图侧视图透视图
摄像机机视图(必须已存在摄像机
当前视图重置视图以边界框显示显示/隐藏网格 显隐背景图像 导入背景图像 居中选定元素 跟从选定对象
Element:当前选定的物体( Object ) 、浪面( Realwave ) 或网面(Mesh)的视图显示:
Bounding Box 边界方框。 Wireframe 网格。
Flat Shaded 棱角面。 Smooth Shaded 光滑面。Scene: 场景中所有物体、浪面或网面的视图显示:
Bounding Box 边界方框。 Wireframe 网线。
Flat Shaded 棱角面。 Smooth Shaded 光滑面。 Wireframe back faces 网格模式时只显示元素正面。Textured 显示贴图。――――――――――
Point of View :当前视图:
Top View 上视图, Front View 前视图
Side view 侧视图, Perspective View 透视图 Camera View 摄像机机视图(场景中必须已存在摄像机)Reset View 使当前视图恢复到0 点居中的系统默认状态
Fast View 进行视图操作时,物体、浪面和网面以边界框显示――――――――――
View Grid 显示或隐藏当前视图的建筑平面。
View Screen Texture 显示或隐藏当前视图的背景图像。需事先导入图像文件,才能显示(见紧下方)。――――――――――
Load Screen Texture 导入视图背景图像。――――――――――
Center Selected 使当前选定元素居中。
Follow Selected 播放时,当前选定的有动作的元素静止不动,视图及其它元素作相对运动――――――――――
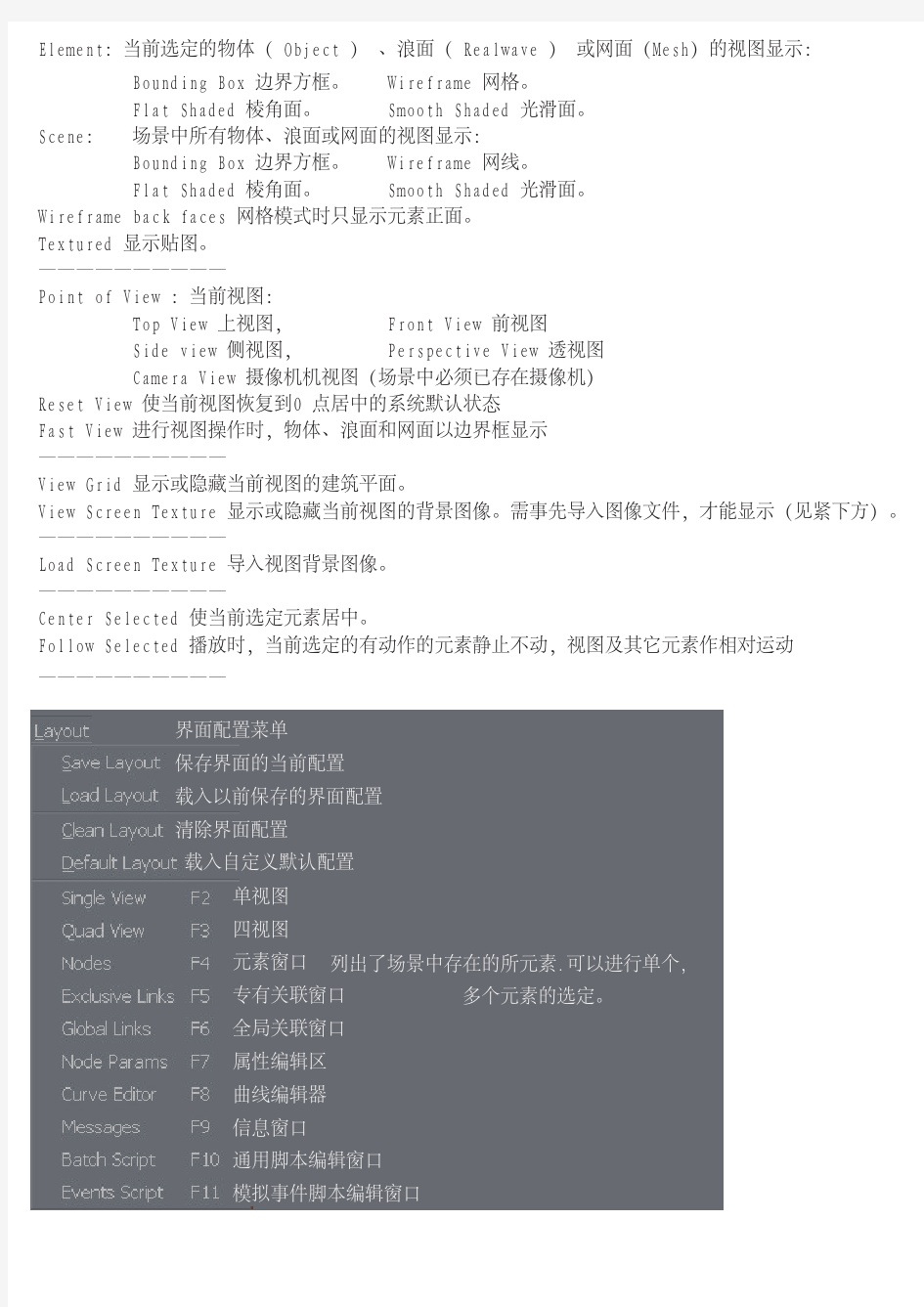
界面配置菜单保存界面的当前配置载入以前保存的界面配置清除界面配置 载入自定义默认配置 单视图
四视图元素窗口
专有关联窗口全局关联窗口属性编辑区曲线编辑器信息窗口通用脚本编辑窗口模拟事件脚本编辑窗口
列出了场景中存在的所元素.可以进行单个,
多个元素的选定。
弹出RealFlow 的插件管理窗口
清除当前场景中经输出中心保存的所有模拟结果
清空缓存清空后退历史
如勾选,鼠标指向粒子时 就会框出现信息框
粒子选定工具
上网检查升级资源重新认证创建行列阵测量工具
Particle Selection 粒子选定工具。
点击打开粒子选定窗口,可以在当前发射器所发射的粒子中选定部分粒子,将它们设置成一个粒子组。对这个粒子组,可以进行三种操作――删除这部分粒子;冻结这部分粒子;将这部分粒子链接到某个物体,以跟随该物体的运动。Create array 创建行列阵。
用于创建发射器或辅助器的行列阵。左边是各方向新创建元素的个数,右边是各新元素间的距离。Measure utility 测量工具。 仅用于测量物体的面积和体积。
输出所有项目输出中心
读取项目文件夹中最后保存的模拟结果
保存当前发射器发射的粒子流在当前帧的状态
Export All 输出所有项目。在输出中心有同名按钮,功能重复。
Update Time Line Cache 读取项目文件夹中最后保存的模拟结果。这是个反悔机制。有时误按 了重置(Reset)按钮,却发现原来的模拟结果是可以用的。这时点选此菜单项,就能恢复原来 的模拟结果。输出中心有同名按钮,功能重复。
File Name Options… 与自定义选项中的Export 栏相同。输出中心也有同名按钮。功能重复。RealFlow particle Bin file(single)保存当前发射器发射的粒子流在当前帧的状态。 用于保存粒子流的初始状态。
第二节 视图右键菜单
处于选择状态
视图
导入/显示 视图背景
适配所有元素
适配选定元素
编辑
添加关键帧删除关键帧删除所有关键帧 下一关键帧 上一关键帧
(同上)第三章 工具栏和控制区
1.添加发射器 2.添加辅助器 3.添加物体 4. 添加约束器 5.创建网面 6.添加摄像机 7.创建浪面
元素创建工具栏
系统脚本工具栏
1. 改变粒子流精度(Change resolution)2. 创建网面(Build meshes)
通用脚本编辑器单视图四视图元素列表窗口专有关联窗口全局关联窗口属性编辑区曲线编辑器信息窗口
模拟事件脚本编辑器
类型选择按钮 分割工具
纵向分割当前窗口 横向分割当前窗口把当前窗口分割成4 部分
更名删除成组
显示与隐藏拷贝元素名
如有树状结构展开如有树状结构关闭
显示所有类型的元素不显示所有类型的元素发射器辅助器物体约束器浪面网面摄像机
网面(Meshes)的右键菜单:
为粒子流在当前帧创建网面
添加粒子流(发射器)
使粒子流成为网面的子元素,才能为之创建网面。
添加场景中所有发射器
清除所有已添加的发射器
在视图中显示网面
浪面(Realwave)的右键菜单:
控点型波浪
涌动型波浪
样式型波浪
波浪脚本
元素窗口 全局关联窗口 专有关联窗口
属性编辑区(Node Params)
1. 发射器的属性编辑区:
元素节点初始状态粒子流统计信息视图显示
圆形发射器的专有属性
是否激活位置旋转绽放轴心点
链接到…也就是建立父子关系颜色
运动继承。粒子是否跟随发射器运动
这是一个只有两个项目的简单面板。无论处于模拟过程中,
或是模拟完成后,都可以任意选取一帧,也就是把时间划块拖到任意一帧,只要此刻的粒子流状态(形态)符合要求,就可以点击面板上的Make Initial State 按钮。点击按钮后似乎什么也没有发生,实际上一个粒子流文件(.bin 格式)已被保存起来了。如果事先已创建项目文
件,初始状态就被保存到项目文件路径中的Initial State 文件夹中,不需要在输出中心勾选任何选项。如果还没有创建项目文件,仍处于试验阶段, 初始状态则会被保存在RF4 的安装目录\Scenes\Initial State\下。
使用初始状态之前,还必须设置Use Initial State=Yes。另外,在模拟控制区的Reset 选项中,勾选Reset To Initial State。
好了,现在点击Reset,时间划块回0,粒子流则处于初始状
态。这是RF4 的新增功能
粒子类型
精度
密度.单位是 kg / m3
内压.粒子流内部粒子间的排斥力
外压.是防止粒子流松散的力
粘滞性
表面张力
插值最大粒子数液体(Liquid)的突出属性是它的不可压缩性。
气体(Gas)的突出属性是它的弥散性,它总是企图占据 它所处的整个空间。惰性粒子(Dumb)实质上相当于Max 中的普通粒子(包括Particle Flow 中的粒子)。惰性粒子内部没有交互作用,既不互相吸引,也不互相排斥。其它类型的粒子对惰性粒子不能产生作用,惰性粒子却能对其它类型粒子产生作用。惰性粒子能与非粒子物体相互作用。它是RealFlow 中效率最高的粒子类型,速度最快,而且非常稳定。不大会发生粒子逃(leaking)、爆炸
(explosions)所导致的模拟失败。
弹性粒子( Elastics ) 是RealFlow 试图用来模拟软体(SoftBody)或布料的。软体的模拟往往不稳定,效果远不如Max和Maya 对软体的处理,不建议使用。但布料的模拟,有它的独特之处Max particles 最大粒子数。用来限制一个发射器所
能发射的粒子数最大值。达到最大值后,发射器或停
止发射(静态)或一边发射一边删除最早发射的粒子(动态)。
Resolution 精度。默认值为1,表示每立方米空间中有1000 个粒子。Density 密度,单位是 kg / m3。密度越大,意味着质量越大,流体的运动越弛缓。默认值1000,代表水的密度
Internal pressure 内压。 粒子流内部粒子间的排斥
力。内压越大,粒子流越倾向于膨胀。内压值很灵
敏,调节时要细心
External pressure 外压。 是防止粒子流松散的力。
将内、外压均设为0,就相当于惰性粒子了
Viscosity 粘滞性。流体的物理属性。水的粘滞性在1
~5 之间,增大粘滞性可以进行油、蜂蜜、水银等的
模拟。
Surface Tension 表面张力。 是造成相邻粒子相互聚拢的力量。增大表面张力可以制作水珠一类的效果。表面张力取很大的值时,流体的粘滞性显著增大。另有表面张力辅助器,功能类似,可以联合应用。Interpolation 插值。 RF4 新增功能,主要与粒子流的初始状态和系统脚本“Change resolution”配套。已经模拟好的粒子流,可以用Change resolution 脚本来改变精度,也就是改变粒子的数目。我们可以用较低的粒子精度,来获得较好的稳定性,保证模拟的顺利进行。模拟完成后,再提高粒子流精度,达到必要的粒子数目。新增加的粒子如何合理分布,并满足粒子运动的方程式,就是插值所要解决的问题。有三个选项:None、Local、Global。None 不进行插值计算。Local 局部插值,是默认插值方法。这种方法使增加粒子后的粒子流尽可能保持原有的形态。Global
全局插值。适用于对维持原有形态的要求不高,粒子增加的数量又很大的情况。
速度
上下方向随机值水平方向随机值圆形比率外溅
体积模式
发射粒子的大小显示箭头箭头长度特性自动调节
通过Export 菜单,或按F12,可以打开输出中心窗口。
反悔按钮
文件名选项清除所有勾选保存所有内容保存所有物体保存所有网面
保存所有发射器粒子流
输出内容 文件保存路径
文件名 图形文件格式 发射器
速度
上下方向随机值水平方向随机值圆形比率外溅
体积模式
发射粒子的大小显示箭头箭头长度特性自动调节
场景中现存的由当前发射器发射的粒子数当前发射器已发射的粒子数粒子质量。最小速度最大速度。
气体的属性面板
粒子温度 粒子流压强 扩张或动能 大小环境温度 应与粒子温度相等
热容 热容越大 粒子群温度分布就越均匀导热性 粒子群与环境之间进行热交换的速率
弹性粒子的属性面板
弹性阻尼弹性极限断裂界限
Spring 弹性。值越大,弹性越强。默认值1 万,大致相当于气球皮的弹性。设为10 万时,相当于钢丝床的弹性。小于500 并继续减小弹性值,粒子间的联系逐步消失,变得互不相干了。
Damping 阻尼。用于减轻“弹簧”的摇晃(不稳定性),太大时,弹簧就会僵硬。
Elastic limit 弹性极限,用“弹簧”初始长度的百分数表示,大于100 才有意义。“弹簧”拉长超过设定值时,弹性消失,粒子群不能继续保持“绷紧”的状态了。Break limit 断裂界限,也用初始长度的百分数表示,大于100才有意义。“弹簧”拉长超过设定值时,粒子群在某个部位断裂,断裂后的粒子群碎片仍保持原有的弹性
粒子与浪面交互属性面板( RW ParticleInteraction)
浮力。默认值与重力相当
杀灭深度。到达设置深度的粒子将被清除 粒子到达浪面表面后的处置方式 粒子与浪面碰撞后 分裂分裂的新粒子数激起波浪撞击力系数最大浪高浪速
波浪传播阻尼水下起浪深度泡沫贴图参与度
On surface 是粒子到达浪面表面后的处置方式。 有3 个选项:
No interact 无反应,是默认选项。粒子的行 为完全正常。
Destroy 杀灭。与浪面接触的粒子将被杀灭。Place 受阻散开。与浪面接触的粒子就象遇到 了固体一样受到阻挡,并沿着浪面向四周 散开,而不是反弹离开浪面。
无论哪个选项,粒子都可以对浪面产生作用,激起波浪。有的选项可能导致其它参数的意义发生改变.比如Destroy 将使Destroy on depth 变得没有意义。
Realflow4菜单中英文对照表 这是主界面(为了截图我把窗口缩小了,不过大概的布局还是能看清的) 最上面一排是标题栏,期待补完…… 从左往右依次是新建、打开、保存,这个跟大部分软件一样。 从左往右依次是选择、移动、旋转、缩放,最后一个是控制被选择物体的轴在世界轴向与自身轴向间切换。 场景缩放与节点目录。 从左往右依次为: 第一个图标:添加一个新的发射器到场景中。 第二个图标:添加一个场或者消亡区域或者其他东西到场景中。 第三个图标:添加一个新的(多边形)物体到场景中。 第四个图标:添加一个约束到场景中。 第五个图标:添加一个新的网格到场景中。 第六个图标:添加一个新的摄像机到场景中。 第七个图标:添加一个RealWave(真实波浪?)到场景中。 四视图与曲线编辑器窗口
Nodes(上左):节点 Exclusive Links(上中):独有连接、单独连接 Global Links(上右):总体连接、全局连接 Node Params(下左):节点参数 Messages(下右):信息 时间控制区期待补完…… 动画控制区期待补完…… 发射器(emitter)篇 Circle:圆形发射器 Square:矩形发射器 Sphere:球形发射器 Linear:线形发射器 Triangle:三角形发射器 Spline:曲线发射器 Cylinder:圆柱形发射器 Bitmap:位图发射器 Object emitter:物体发射器 Fill Object:填充物体 RW_Splash:RW飞溅 RW_Particles:RW粒子 Fibers:纤维发射器 Binary Loader: NBinary Loader:
质量管理中英文名词对照 质量管理中英文名词对照表 Accuracy 准确度 Active 主动 Action 评价.处理 Activity 活动 Add 加 Addition rule 加法运算规则 Analysis Covariance 协方差分析 Analysis of Variance 方差分析 Appraisal Variation 评价变差 Approved 承认 ASQC 美国质量学会 Attribute 计数值 Audit 审核 Automatic database recovery 数据库错误自动回复Average 平均数 balance 平衡 Balance sheet 资产负债对照表 Binomial 二项分配 Body 机构 Brainstorming Techniques 脑力风暴法Business Systems Planning 企业系统规划 Cable 电缆 Capability 能力 Cause and Effect matrix 因果图.鱼骨图 Center line 中心线 check 检查 Check Sheets 检查表 Chi-square Distribution 卡方分布 Clutch spring 离合器弹簧 Coining 压印加工 Common cause 共同原因 Complaint 投诉 Compound factor 调合因素 Concept 新概念 Condenser 聚光镜 Conformity 合格 Connection 关联 Consumer’s risk 消费者之风险 Control 控制 Control characteristic 管制特性
品质管理 (be) qualfied, up to grade 合格 模具正式投産前確認 3B 5M Man/Machine/Material/Method/Measurement 人力/ 機器/ 材料/ 方法/ 量測 5S整理/ 整頓/ 清掃/ 清潔/ 教養 5WIH When/Where/Who/What/Why/How to 何時/ 何地/ 誰/ 何事/ 為什麼/ 怎麼做7QCTools7 Quality Controls Tools 品管七大手法 8 disciplines 8項回復內容 abnormal handling 異常處理 ACC Accept 允收 acceptance = receive 驗收 ADM Absolute Dimension Measurement全尺寸測量 AIR Artical Inspection report AOD Accept On Deviation 特采 AOQ Average Output Quality平均出廠品質 AOQL Average Output Quality Level 平均出廠品質水準 APP Approve 核准,認可,承認 AQL Acceptable Quality Level 允收品質水準 AR Averary Range全距平均值
Bending 軟體導入 C=0 Critical=0 極嚴重不允許 CAR Corrective action request 改正行動要求改正報告 CP capability index 製造能力指數 CPK capability index of process 模具制程能力參數 CR Critical 極嚴重的 defective product/non-good parts 不良品 defective products 不良品 DFR Defect Failure Rate NG Not Good 不良,不合格 No.Number 數(號) OOBA out of box audit 開箱檢查 OQA output quality assurance 出貨品質保證 OQC output quality control 最終出貨品管 ORT On going Reliability Qualit P/O Waive Purchase Order Waive Packing 包裝 PDCA Plan/ Do /Check /Action 計劃/ 執行/ 檢查/ 總結POC passage quality control 段檢人員
波束赋形算法研究包括以下几个方面: 1.常规的波束赋形算法研究。即研究如何加强感兴趣信号,提高信道处理增益,研究的是一 般的波束赋形问题。 2.鲁棒性波束赋形算法研究。研究在智能天线阵列非理想情况下,即当阵元存在位置偏差、 角度估计误差、各阵元到达基带通路的不一致性、天线校准误差等情况下,如何保证智能天线波束赋形算法的有效性问题。 3.零陷算法研究。研究在恶劣的通信环境下,即当存在强干扰情况下,如何保证对感兴趣信 号增益不变,而在强干扰源方向形成零陷,从而消除干扰,达到有效地估计出感兴趣信号的目的。 阵列天线基本概念(见《基站天线波束赋形及其应用研究_ 白晓平》) 阵列天线(又称天线阵)是由若干离散的具有不同的振幅和相位的辐射单元按一定规律排列并相互连接在一起构成的天线系统。利用电磁波的干扰与叠加,阵列天线可以加强在所需方向的辐射信号,并减少在非期望方向的电磁波干扰,因此它具有较强的辐射方向性。组成天线阵的辐射单元称为天线元或阵元。相邻天线元间的距离称为阵间距。按照天线元的排列方式,天线阵可分为直线阵,平面阵和立体阵。 阵列天线的方向性理论主要包括阵列方向性分析和阵列方向性综合。前者是指在已知阵元排列方式、阵元数目、阵间距、阵元电流的幅度、相位分布的情况下分析得出天线阵方向性的过程;后者是指定预期的阵列方向图,通过算法寻求对应于该方向图的阵元个数、阵间距、阵元电流分布规律等。对于无源阵,一般来说分析和综合是可逆的。 阵列天线分析方法 天线的远区场特性是通常所说的天线辐射特性。天线的近、远区场的划分比较复杂,一般而言,以场源为中心,在三个波长范围内的区域,通常称为近区场,也可称为感应场;在以场源为中心,半径为三个波长之外的空间范围称为远区场,也可称为辐射场。因此,在分析天线辐射特性时观察点距离应远大于天线总尺寸及三倍的工作波长。阵列天线的辐射特性取决于阵元因素和阵列因素。阵元因素包括阵元的激励电流幅度相位、电压驻波比、增益、方
发射器通用属性介绍: Resolution:分辨率,这里可以理解为单位时间内例子发射的数量,这个值越高,流体效果就会越好,但要考虑到硬件的支持性能适当调节。 Density:流体密度,密度越高流体的速度就会越慢,越沉重。 Int pressure:内部压力,这个数值会影响两组相近的粒子,这个数值为0时就会取消流体和气体的运动。Ext pressure外部压力,这个数值会对所有粒子产生影响,并使粒子保持一种紧缩的状态防止其扩散。 Viscosity:黏度,像水这样的粒子黏度值比较低大概1-4之间,蜂蜜或石油这类的粒子就会比较高一点大概5-8之间。 Max particles:粒子的最大数量,当前发射器粒子总量。 基础发射器: 分为6种外形,circle圆形发射器、square方形发射器、sphere圆球发射器、linear线性发射器、triangle三角形发射器、cylinder圆柱形发射器。 他们的发射方式是相同的,只是外形有所变化。 此类发射器的参数介绍: Volume:体积,此参数设为正数时会产生大量粒子。 Speed:速度,控制着粒子发射器的速度,速度越高每秒产生的粒子就越多。为0时则不发射粒子。 Vrandom:垂直随机值,给粒子添加垂直方向的运动变化。 Hrandom:水平随机值,给粒子添加水平方向的运动变化。 Ring ratio:环比率,调整发射器的内径。 Randomness:随机值,粒子在原始方向或位置上添加一些随即变化。 object emitter:物体发射器 在链接物体的表面或顶点发射粒子。
Object:目标物体,选择要发射粒子的物体。 Creation:选择发射粒子的类型。 Parent velovityper:父速率,粒子在产生时获得一个父速率。 Distance threshold:距离极限,粒子与物体之间的距离。 Jittering:抖动,粒子的随机状态。 Speed:速度。 Randomness:随机值。 Smooth normals:平滑法线,设置粒子的平滑度。 Use texture:使用纹理,粒子将从物体材质中发射。 Select face:选择表面,点击此按钮后选择物体的表面,粒子就会从选择的表面进行发射Select vertex:选择顶点。 Clear selection:取消选择。 fill object:充满物体 这个发射器可以在所选物体内产生粒子,也可以在物体的表面产生粒子。 参数介绍: Object:物体,选择要进行计算的物体。 Fill volume:填充体积,用粒子填充满粒子。 Fill ratio:填充比例。 Remove#layers:移除层,移除粒子的百分比,移动过程是从外向内依次进行的。Jittering:抖动,使粒子为随机状态。 realwave emitters:飞溅发射器 此发射器可以给任何一个于水面相互作用的物体添加飞溅效果。
多波束形成技术研究 摘要:讨论了跟踪与数据中继卫星系统(TDRSS)中关于多波束形成的算法,优选的有LMS自适应方式和相位调整自适应方式;并简单介绍了波束控制和波束形成的实现。 关键词:TDRSS;多波束形成;LMS自适应算法;相位调整自适应算法 一、前言 随着航天技术的发展,要求测控通信站能高覆盖地对飞船等多个目标进行测控通信。要解决这个问题靠现有地面测控网和业务接收站已不能满足要求,需要建立天基测控通信系统,即跟踪与数据中继卫星系统(TDRSS)。 TDRSS把测控通信站搬移到天上同步定点轨道的中继星上,从上向下观测中低轨卫星、飞船、航天飞机等空间飞行器,从而提高了覆盖率。为了减轻中继星的复杂性和负担,将中继卫星观测到的数据和信息传到地面,由地面中心站进行处理。TDRSS中继星相控阵天线同时与多个用户航天器保持跟踪,地面站到航天器的正向通讯为时分多波束,反向通讯为码分和同时多波束。为了减轻中继星的负担,中继星上只装有形成正向天线波束扫描所需的电调移相器,由地面终端计算并发出指令,调节星上移相器相位,让天线波束以时分方式扫描对准各用户航天器,在对准期间完成正向数传。多个用户航天器送到中继星的反向数传信号在星上进行多波束形成会大大增加中继星的复杂性,反向信号经星上阵列天线接收和变换,各阵元收到的信号用频分多路方式相互隔离送往地面,由地面接收前端将频分多路还原成同频多路阵元输出,交由终端进行相控阵多波束形成处理。所谓波束形成, 就是利用开环控制或闭环自适应跟踪方法,对不同反向到达的信号用不同的权系数矢量对各阵元输出进行幅度和相位加权, 使各阵元收到的同一用户信号在合成器中得以同相相加, 输出信号最大, 干扰和噪声最小。当存在多个目标时, 地面终端利用码分多址方法和利用多个波束形成器并行地完成各目标的波束合成处理完成各用户的数传与测控。 二、多波束形成算法 数据中继卫星系统在多址方式下,服务对象一般分布在较低的地球轨道上,当用户星离地面的轨道高度在3 000 km以下时,中继星各阵元波束宽度只要26°就可覆盖地球周围的所有用户星。 当用户星以最大速度10 km/s运动,用户星穿过3.5°宽的合成波束所需的时间最短为205 s,所以中继星跟踪用户星所需的波束移动角速度是很小的。假定波束移动步进量为阵合成波束宽度3.5°的5%即0.175°,波束步进间隔时间长达10.5 s。只要计算机能在10.5 s 内依据用户星位置更新相控阵的相位加权系数,就会使合成波束移动并时刻对准目标。 按照目标的捕获与跟踪过程,多波束形成应有3种工作方式:主波束控制方式(开环)、扫描方式(开环)及自跟踪方式(闭环)。 当有先验信息如根据目标的轨道方程计算出目标在空中的当前位置时,可采用开环的主波束控制方式, 由用户星的实时俯仰角和方位角,计算机算出加权系数矢量,送到多波束处理器完成波束加权合成。用户星相对中继星来说角度移动缓慢,随着用户星的移动,计算机实时逐点计算出权系数矢量,可维持主波束的开环跟踪。主波束控制方式一般用于目标的初始捕获,完成后进入自动跟踪状态。 如果没有先验信息不知道目标的起始位置,可以采用波束扫描方式,根据事先制定的空间角度扫描轨迹图形,顺序调出各角度位置的加权矢量,形成波束的空中扫描,当波束扫到目标时,波束合成器输出最大信号并给出目标捕获指示,完成目标初始捕获,随即进入波束
调整RealFlow的全局参数 File cache 文件缓存是保留下来用于播放模拟数据的内存。这个参数如果使用较高的值,那么播放就可以加速 Min substeps最小子步数,仅仅适用于“Adaptive自适应”模式。如果增大这个数值,模拟就会变慢,但是增加精确程度,不稳定模拟变得稳定,一般数值5到10之间,如果错误仍然存在,可以轻微增大。 Max substeps最大子步数,也受限“Adaptive自适应”模式,低数值可以加速计算,但代价是牺牲精确度。过低值会导致粒子和物体之间的碰撞检测失败。 HYBRIDO混合粒子 grid domain 网格空间(网格流体都需要) grid fluid 网格流体 创建网格流体的三个步骤: 1.创建一个网格流体框 2.添加一个支持物体(几何体)作为发射器的外形 3.选中支持物体并创建物体发射器。 PS:网格流体框之间是不能相互交互的,他们都是分开区分的。 理解粒子在流体解算器中的地位很重要,基本上,他们是随流体进行流动的,没有质量的,他们的重要作用就是预览主水体,但是计算流体动力学的时候,他们却不被考虑,所以即使粒子数很多但是计算过程也是非常的快速。 网格流体容器(Grid Fluid Domain) Displacemrnt 置换面板 提供你对海洋曲面的所有必须参数。不仅能定义不同级别的细节程度,还可以控制外观。置换贴图使用一种静态的方法来创建曲面结构,这种方法强烈依赖于海洋曲面的精度。 Fluid 面板,这个参数组用于修改网格流体的物理属性以达到一些效果。
1.Resolution细分精度,此关键参数,只是增加容器空间内小单元格的数量,并不是增加实际粒子数。 2.Particle sampling粒子采样,控制粒子的数量,数值进行三次方计算等于每个小单元格的粒子数。 3.Density 密度,对流体密度的修改不会影响流体的动力学行为,即使修改为很大的值都不会产生很明显的效果。因为RealFlow的网格流体采用的是运动学(kinematic)的粘稠度,而不是动力学的。 4.Viscosity粘稠度,是直接和密度相连接的,RealFlow使用直接取决密度的运功学粘稠度。最小允许的粘稠度是水的粘稠度(大约0.000001),最大允许数值是融化的玻璃(大约1) https://www.doczj.com/doc/9412822954.html,pressibility 可压缩性,这个数值可以在0和1之间,主要控制流体的弹性,数值越大弹性越大,默认0.5,非常适合于表现水的效果。 曲面(Surface)面板(实体栅格属性面板) 网格流体的曲面在创建诸如水花(splash)和泡沫(foam)等辅助效果时,是个很重要的角色,决定最终在哪里产生辅助粒子。 两个重要的概念距离范围(distance field)和带宽(bandwidth) 距离范围:RealFlow需要一个距离范围来执行许多内部检查。这些检查通常来说只在曲面附近的相关区域内需要。在创建流体的置换时,在计算水花粒子的随机粒子数时,在计算泡沫粒子的位置和生成网格流体方面,和带宽,水花粒子和泡沫粒子的产生和反射,创建网格上的源也都是连接到距离范围上。一个在限定的区域内执行基于距离范围的检查当然要比在整个流体曲面上快得多。 带宽:以距离范围执行内部检查的曲面附近的相关区域就是带宽。带宽可以看作是网格框的一个属性,他和细分精度密切相关。 (以我理解,距离范围应该就是一个供网格解算的一个空间) 关于计算流体曲面“Calculate surface”,你有很多选项:
摘要 随着高速、超高速信号采集、传输及处理技术的发展,数字阵列雷达已成为当代雷达技术发展的一个重要趋势。数字波束形成(DBF)技术采用先进的数字信号处理技术对阵列天线接收到的信号进行处理,能够极大地提高雷达系统的抗干扰能力,是新一代军用雷达提高目标检测性能的关键技术之一。并且是无线通信智能天线中的核心技术。 本文介绍了数字波束形成技术的原理,对波束形成的信号模型进行了详细的推导,并且用matlab仿真了三种计算准则下的数字波束形成算法,理论分析和仿真结果表明以上三种算法都可以实现波束形成,并对三种算法进行了比较。同时研究了窄带信号的自适应波束形成的经典算法。研究并仿真了基于最小均方误差准则的LMS算法、RLS算法和MVDR自适应算法,并且做了一些比较。 关键词:数字波束形成、自适应波束形成、智能天线、最小均方误差、最大信噪比、最小方差
ABSTRACT With the development of high-speed, ultra high-speed signal acquisition, transmission and processing technology, digital array radar has became an important trend in the development of modern radar technology. Digital beamforming (DBF) technology uses advanced digital signal processing technology to process the signal received by antenna array. It can improve the anti-jamming ability of radar system greatly and it is one of the key technology。It is the core of the smart antenna technology in wireless communication too。 This paper introduces the principle of digital beam forming technology, the signal model of beam forming was presented, And the digital beam forming algorithm under the three calculation criterion was simulated by MATLAB, theoretical analysis and simulation results show that the three algorithms can achieve beamforming, and made some comparison between the three algorithms. At the same time, made some study about the adaptive narrow-band signal beam forming algorithm. Learned and Simulateded the LMS algorithm base on minimum mean square error criterion and RLS algorithm and MVDR algorithm, and do some comparison Key Words:DBF, ADBF, Smart antenna, The minimum mean square error, The maximum signal to noise ratio
第3章 自适应波束形成及算法 (3.2 自适应波束形成的几种典型算法) 3.2 自适应波束形成的几种典型算法 自适应波束形成技术的核心内容就是自适应算法。目前已提出很多著名算法,非盲的算法中主要是基于期望信号和基于DOA 的算法。常见的基于期望信号的算法有最小均方误差(MMSE )算法、小均方(LMS )算法、递归最小二乘(RLS )算法,基于DOA 算法中的最小方差无畸变响应(MVDR )算法、特征子空间(ESB )算法等[9]。 3.2.1 基于期望信号的波束形成算法 自适应算法中要有期望信号的信息,对于通信系统来讲,这个信息通常是通过发送训练序列来实现的。根据获得的期望信号的信息,再利用MMSE 算法、LMS 算法等进行最优波束形成。 1.最小均方误差算法(MMSE ) 最小均方误差准则就是滤波器的输出信号与需要信号之差的均方值最小,求得最佳线性滤波器的参数,是一种应用最为广泛的最佳准则。阵输入矢量为: 1()[(),, ()]T M x n x n x n = (3-24) 对需要信号()d n 进行估计,并取线性组合器的输出信号()y n 为需要信号 ()d n 的估计值?()d n ,即 *?()()()()H T d n y n w x n x n w === (3-25) 估计误差为: ?()()()()()H e n d n d n d n w x n =-=- (3-26) 最小均方误差准则的性能函数为: 2 {|()|}E e t ξ= (3-27) 式中{}E 表示取统计平均值。最佳处理器问题归结为,使阵列输出 ()()T y n w X n =与参考信号()d t 的均方误差最小,即: 2{ |()|}M i n E e t
Realflow动力场参数详解 赵勇攀整理 每个辅助器的前面有一个小图标。表示辅助器能用于发射器;表示辅助器能用于发射器和物体。 Gravity 重力 Affect 作用方式。没有明显意义。 Strength 力度。默认值 9.8,力的方向是垂直向下(-Z)。 但可以通过旋转,设置为任何方向。也常需改变它的大小,来控制 粒子的运动速度,或容器中粒子的松散程度。 Bounded 边界界限。可以将重力局限定在一定范围内,范围之外的粒子或物体不会受到影响。 有三种设界方式。 方块(Box)在Node 属性面板中设置方块的形状、大小、方向、位置等。 平面(Plane)在Node 属性面板中设置平面的形状、大小、方向、位置等。推进器(Push)适用于物体。把关联的物体推动前进。 Underwater 水下推进。在选用Push 后才有意义。仅用于与浪面有交互作用的物体。选Yes,推进器只有没入水面后才起作用。 Attractor 牵引力 Internal force 中心引力。吸引器中心的引力强度。取负值便是排斥力强度。这是吸引器最具实际意义的参数项。 Internal radius 中心半径。中心可以是一个区域,这个区域内的引力强度均等。External force 外围引力。远离中心的外围区域仍具有的最小引力。 External radius 衰减半径。自中心到外围,引力强度逐步衰减至外围引力值,之后保持最小引力值不变。衰减半径设置的是最小引力值的起点。如设外围引力为0,则衰减半径设置的是引力场的边界。 Attenuated 衰减。默认否。此时,上述中心半径、外围引力、衰减半径这三项参数未被激活,不可用。中心不再是个区域,而只是一个点。 Attractor type 吸引器类型。有三种:中心点形(spherical)、轴线型(axial)和球形(planetary)。轴线型和球形还各有自己的一项参数。 Axial strength 轴线引力。选轴线型,此项被激活。值越大,整条轴线的引力越大。设为0 时,实际上就是中心点型吸引器了。 Planet radius 球半径。选球形,此项被激活。这里把球体当作一个星球,企图模拟星球的引力场。进入球体的粒子受到球心的吸引,效果与中心点型完全相同。球体以外的粒子,受到的引力较小,与粒子到球心的距离的平方的倒数成正比。Boundary 边界。默认否。选Yes,视图中出现一个图标,用于设置有效范围的大小,适合于无衰减工作状态。界的大小是通过对视图中的图标进行缩放、移动来调节的。
缩写英文对照中文术语 8D 8 Disciplines Of Solving Problem 解决问题8步法 AC./RE. Acceptable / Rejective 允收/拒收 AQL Acceptable Quallity Level 允收水准 ABB Activity-Based Budgeting 实施作业制预算制度 ABC Activity-Based Costing 作业制成本制度 ABM Activity-Based Mangement 作业制成本管理 APS Advanced Planning And Scheduling 应用程式服务供应商APQP Advanced Product Quality Planning 先期产品品质规划ANOVA Analysis Of Variance 方差分析 AAR Appearance Approval Report 外观承认报告 AC Appraisal Cost 鉴定成本 ASL Approved Suplier List 合格供应商清单 AVL Approved Vendor List 认可的供应商清单 ATP Available To Promise 可承诺量 BSC Balanced Score Card 平衡记分卡
BOM Bill Of Material 材料明细 BTF Build To Forecarst 计划生产 BTO Build To Order 订单生产 BPR Business Process Reengineering 企业流程再造 CPK Capability Of Process 修正过程能力指数 Ca. Capability Of Accuraty 精确度指数 Cp. Capability Of Precesion 精密度指数 CRP Capacity Requirement Planning 产能需求规划 C. OF C. Certificate Of Compliance (质量)承诺证明书CEO Chief Excutive Officer 执行总裁 CQC Companywide Quality Control 全公司范围的品质管理CPM Complaint Per Illion 每百万报怨次 CAD Computer Aided Design 计算机辅助设计 CTO Configuration To Order 客制化生产 CRC Contract Review Committee 合同评审委员会 CIF Cost Inusance And Freight 到岸价格
阵列雷达数字波束形成技术仿真与研究 【摘要】本文首先介绍了数字波束形成的基本原理,随后对普通波束形成及基于LCMV准则和MVDR准则的单多波束自适应形成技术分别进行了原理介绍和仿真分析。仿真结果表明,基于自适应技术的数字波束形成能有效提取有用信号,并在干扰方向上形成零陷,有效的抑制噪声和干扰,大大提高了阵列雷达的天线性能。 【关键词】阵列雷达;波束形成;自适应 1.引言 波束形成(Beam Forming,BF)[1]是指将一定几何形状排列的多元阵列各阵元的输出经过加权、时延、求和等处理,形成具有空间指向性波束的方法。BF技术的广泛应用赋予了雷达、通信系统诸如多波束形成、快速、灵活调整方向图综合等许多优点。阵列天线的波束形成可以采用模拟方式,也可以采用数字方式,采用数字方式在基带实现滤波的技术称为数字波束形成(Digital Beaming Forming,DBF),它是天线波束形成原理与数字信号处理技术结合的产物,是对传统滤波技术的空域拓展,在通信领域中也称为智能天线技术。 2.普通波束形成 2.1 普通波束形成的基本原理 要研究数字波束形成技术,首先要建立阵列信号的表示形式。假设接收天线为N元均匀线阵,阵元间的间隔为d,各阵元的加权矢量为W=[w1,w2,…,wN],假设信号为窄带信号S(t),信号波长为,来波方向为,经过加权控制的阵列天线示意图如图1所示[2]。 图1 阵列天线波束形成示意图 若以阵元1为参考点,则各阵元接收信号可以写成: (1) (2) 将上式写成矢量形式,得: (3) 称为为方向矢量或导向矢量。在窄带条件下,它只依赖于阵列的几何结构和波的传播方向,因此,均匀线阵的导向矢量可表示为:
质量管理八大原则原则 本译文表述的虽然是ISO9000:2000 系列标准下的质量管理原则,但这些原则与CMM/CMMI 标准的管理原则是相通的。特别是CMMI 标准,综合了三个源标准,也借鉴和融合了当今适用的管 理理论和实践,包括ISO9000 等其他的标准的管理思想。 各软件企业所服务的行业不同,企业性质不同,组织战略不同,实施ISO9000 标准,推行 CMM/CMMI 标准也就会有不同的实施方法。但管理原则应该是一致的。 Introduction 介绍 This document introduces the eight quality management principles on which the quality management system standards of the revised ISO 9000:2000 series are based. These principles can be used by senior management as a framework to guide their organizations towards improved performance. The principles are derived from the collective experience and knowledge of the international experts who participate in ISO Technical Committee ISO/TC 176, Quality management and quality assurance, which is responsible for developing and maintaining the ISO 9000 standards. 本文介绍了修订版ISO9000:2000 质量管理体系标准所依据的八大管理原则。这些原则可以作为一个框架,指导高级管理者改进组织的绩效。这些原则来源于参与ISO 技术委员会ISO/TC176 质量管理和质量保证的国际专家组的集体经验和知识。技术委员会负责ISO9000 标准的开发和维护。 The eight quality management principles are defined in ISO 9000:2000, Quality management systems Fundamentals and vocabulary, and in ISO 9004:2000, Quality management systems Guidelines for performance improvements. 这八大管理原则在以下二个标准中有定义:ISO9000:2000, 质量管理体系基础和词汇; ISO9004:2000 ,质量管理体系绩效改进指南。 This document gives the standardized descriptions of the principles as they appear in ISO 9000:2000 and ISO 9004:2000. In addition, it provides examples of the benefits derived from their use and of actions that managers typically take in applying the principles to improve their organizations' performance. 本文给出了八大管理原则在ISO 9000:2000 和ISO 9004:2000 中的标准描述。另外,列举了使用这些原则的一些好处,以及管理人员应用这些原则改进组织绩效的有代表性的做法。 Principle 1 Customer focus 原则 1 以客户为关注焦点 Organizations depend on their customers and therefore should understand current and future customer needs, should meet customer requirements and strive to exceed customer expectations. 组织依赖于他们的客户,所以应该了解客户现在和将来的需求,应该满足客户需求并努力超越客户期望。
自适应波束形成仿真 一、理想情况 在理想情况下,假设阵列中各阵元是各向同性的且不存在通道不一致、互耦等因素的影响,则()()()t t t =+X AS N 。 在波束形成时,通过适当的时延可以改变阵列的主瓣方向,数字波束形成时可通过复加权来实现,也就是说加权系数可以改变阵列方向图,如果加权系数使得在干扰方向对阵列方向图形成零点,那么就可以完全抑制该干扰,这种加权方式就可通过自适应波束形成的方式来获得。 考虑一个线性阵列,由M=2M ’+1个感应器构成 图1-1 线性阵列空间采样 空间平面波信号为: 0(,)exp[()]s x t j t k x ω=-? 第m 个感应器的坐标为: ?(')m x m M dx =- 感应器的输出为: 0()(,)exp[(('))]m m x y t s x t j t k m M d ω==-- 如果对每个阵列输出采样则信号复包络可构成向量: 1 1 sin sin 2 2 ()[]M M jk d jk d T s a k e e θθ ---= 设干扰(噪声)协方差阵为n R ,则在最大信噪比准则下加权向量w 的最优解为: *1()n s w R a k -= 波束响应 ()(),H p θθθ=∈Θw a 。d 。 。 。 。 。 。 。
1.改变信号、干扰方向 条件:L=1; %采样数(快拍数) SNR=20; %信号的信噪比 INR1=30; %干扰噪声比 INR2=30; %干扰噪声比 (1) 信号方向:0°干扰方向:20°,-20°
权值W 波束响应P
(2) 信号方向:-10°干扰方向:-20°,30° 权值W
场景:缓存 “缓存”意味着RealFlow | Cinema 4D将模拟数据写入磁盘(每个流体/网格节点和帧一个文件)并保存以供以后使用,例如用于重放模拟或与其他程序交换。 我们建议您阅读以下页面以获取更多信息:→“缓存模拟”。 轴设置 选择轴设置以确定场景的高度轴。 ●Cinema 4D / RealFlow = Z点远离用户,而X指向右侧,Y指向上方。 ●Houdini / Maya = Y指向用户,而X指向右侧,Z指向上方。 如果要从其他应用程序导入或导出网格,以及当网格显示为翻转或倾斜时,此选项很重要。 缓存文件夹(Mac OS X):这是存储模拟文件的文件夹的OS X路径。默认文件夹在Cinema 4D>编辑>首选项...> RealFlow下配置。 缓存文件夹(Windows):这是存储模拟文件的文件夹的Windows路径。默认文件夹在 Cinema 4D>编辑>首选项...> RealFlow下配置。 使用缓存 启用RealFlow时| Cinema 4D将从“缓存文件夹(macOS | Windows)”中读取现有缓存文件。 帧偏移 使用缓存后,可以偏移动画。此参数仅与缓存的模拟和效果流体、刚体、弹性和网格相关。您可以指定全局帧偏移,对所有节点都有效。此全局“帧偏移”也会影响单个节点偏移。rame offset + node-specific offset 变形器缓存模式 有三种选择:
●“点级动画(PLA)”。点级动画是Cinema 4D提供的一种记录顶点变形/动画的机制。选择 此选项后,所有几何体都受RealFlow |影响 Cinema 4D变形器(Rigid,Elastic和Particle Skinner)在根处复制,添加后缀“(cache)”。此信息存储在Cinema 4D文档中。 在此模式下不会生成修改对象的文件。此外,在此模式下,不会为刚性或弹性缓存生成任何Alembic文件。 ●“导出文件序列”。选择此选项后,RealFlow | Cinema 4D每帧,对象和刚性/弹性容器写入 一个刚性/弹性数据文件。 ●“导出文件序列+点级动画(PLA)”。两种先前选项的组合。 有关每种选项的便利性的更多信息,请查看→“缓存刚性和弹性”。 缓存模拟 当你点击这个按钮RealFlow | Cinema 4D将模拟调整后的帧范围: ●在此过程中,粒子不可见,但模拟进度可以跟随有关当前帧,经过时间和写入数据的对话 框信息。 ●RealFlow | Cinema 4D每帧写一个Alembic粒子文件,并在上面指定的“缓存文件夹”下写 入流体容器。 ●如果选择“导出文件序列”,则RealFlow | Cinema 4D每帧,对象和刚性/弹性容器写入一个 刚性/弹性数据文件(文件数量可能变得非常大)。 ●如果选择“点级动画(PLA)”,则会创建一个新的Null节点,其中包含与RealFlow修改的 每个对象相关的烘焙PLA。在模拟过程中使用Cinema 4D。 缓存网格 要从已缓存的模拟中创建和保存网格,请按此按钮: ●在此过程中,粒子不可见,但模拟进度可以跟随有关当前帧,经过时间和写入数据的对话 框信息。 ●RealFlow | Cinema 4D每帧写一个Alembic网格文件,并在上面指定的“缓存文件夹”下写 入网格容器。 删除缓存 单击此按钮会提示您删除与当前场景或文件夹中找到的任何缓存文件相关的缓存文件。此操作无法撤消。选项是: ●“删除场景缓存文件(N个文件)”。缓存文件夹中与当前场景流体,网格或刚性/弹性对象的 名称匹配的文件将被删除。初始状态将被保留。 ●“删除缓存文件夹(N个文件)”。将删除具有以下扩展名的缓存文件夹顶级文件:ABC,PTC 和PNG。
MVDR自适应波束形成算法研究 摘要 波束形成技术和信号空间波数谱估计是自由空间信号阵列处理的两个主要研究方面。MVDR是一种基于最大信干噪比(SINR)准则的自适应波束形成算法。MVDR算法可以自适应的使阵列输出在期望方向上功率最小同时信干噪比最大。将其应用于空间波数谱估计上可以在很大程度上提高分辨率和噪声抑制性能。本文将在深入分析MVDR算法原理的基础上,通过计算机仿真和海上试验数据处理的结果,分析了MVDR算法在高分辨率空间波数谱估计应用中的性能。同时通过比较对角加载前后的数据处理结果,分析对角加载对MVDR的改进效果。 关键词:波束形成;空间波数谱估计;MVDR;对角加载
Study of MVDR Self-adapting Beam-forming Algorism Abstract Beamforming technology and signal special beam-number spectral estimation are the two major researching emphasis in array signal processing. MVDR is a self-adapting algorism based on the maximal SINR principle. It can self-adaptingly make the array output reach maximum on the expected direction with the lowest SINR. Applying this algorism to special beam-number spectral estimation can to great extent increase the resolution and the inhibition capability. This paper makes a further analysis of MVDR algorism with the result of computer emulation and the processing of experimental data. Furthermore, this paper also shows the improvement of diagonal-loading technology to MVER algorism. Keywords: Beam-forming ;Spatial Wave-number spectral estimation;MVDR;Diagonal loading