
食饵—捕食者模型稳定性分析 【摘要】自然界中不同种群之间还存在着一种非常有趣的既有相互依存、又有相互制约的生活方式:种群甲靠丰富的天然资源生存,种群乙靠捕食甲为生,形成食饵-捕食者系统,如食用鱼和鲨鱼,美洲兔和山猫,害虫和益虫等。本文是基于食饵—捕食者之间的有关规律,建立具有自身阻滞作用的两种群食饵—捕食者模型,分析平衡点的稳定性,进行相轨线分析,并用数值模拟方法验证理论分析的正确性。 【关键词】食饵—捕食者模型相轨线平衡点稳定性
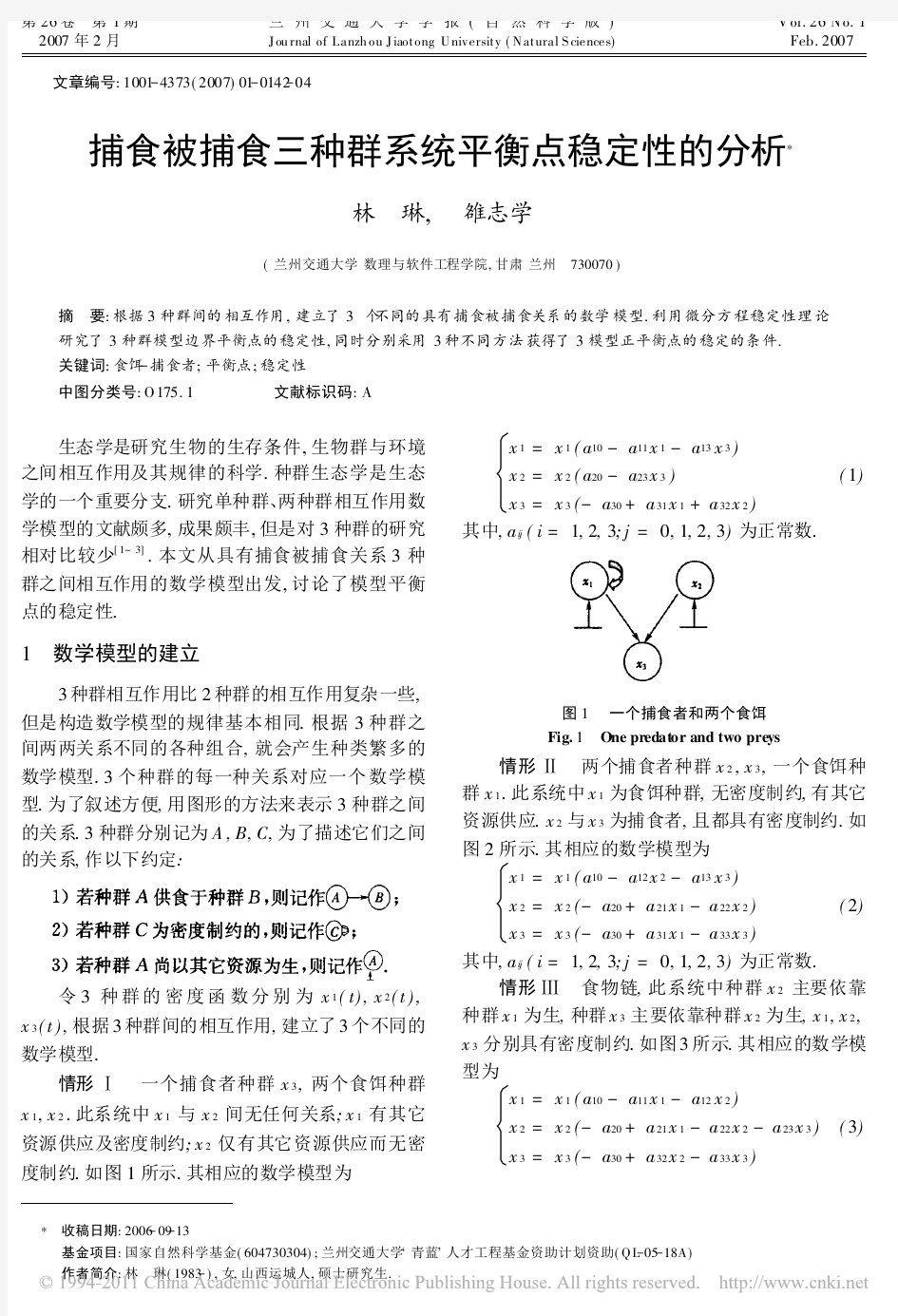
一、问题重述 在自然界中,存在这种食饵—捕食者关系模型的物种很多。下面讨论具有自身阻滞作用的两种群食饵-捕食者模型,首先根据该两种群的相互关系建立模型,解释参数的意义,然后进行稳定性分析,解释平衡点稳定的实际意义,对模型进行相轨线分析来验证理论分析的正确性。 二、问题分析 本文选择渔场中的食饵(食用鱼)和捕食者(鲨鱼)为研究对象,建立微分方 程,并利用数学软件MATLAB 求出微分方程的数值解,通过对数值结果和图形的观察,猜测出它的解析解构造。然后,从理论上研究其平衡点及相轨线的形状,验证前面的猜测。 三、模型假设 1.假设捕食者(鲨鱼)离开食饵无法生存; 2.假设大海中资源丰富,食饵独立生存时以指数规律增长; 四、符号说明 )(t x /)(1t x ——食饵(食用鱼)在时刻t 的数量; )(t y /)(2t x ——捕食者(鲨鱼)在时刻t 的数量; 1r ——食饵(食用鱼)的相对增长率; 2r ——捕食者(鲨鱼)的相对增长率; 1N ——大海中能容纳的食饵(食用鱼)的最大容量;
2N ——大海中能容纳的捕食者(鲨鱼)的罪的容量; 1σ——单位数量捕食者(相对于2N )提供的供养食饵的实物量为单位数量捕食 者(相对于1N )消耗的供养甲实物量的1σ倍; 2σ——单位数量食饵(相对于1N )提供的供养捕食者的实物量为单位数量捕食 者(相对于2N )消耗的供养食饵实物量的2σ倍; d ——捕食者离开食饵独立生存时的死亡率。 五、模型建立 食饵独立生存时以指数规律增长,且食饵(食用鱼)的相对增长率为1r ,即 rx x =',而捕食者的存在使食饵的增长率减小,设减小的程度与捕食者数量成正 比,于是)(t x 满足方程 axy rx ay r x t x -=-=')()( (1) 比例系数a 反映捕食者掠取食饵的能力。 由于捕食者离开食饵无法生存,且它独立生存时死亡率为d ,即dy y -=',而食饵的存在为捕食者提供了食物,相当于使捕食者的死亡率降低,且促使其增长。设这种作用与食饵数量成正比,于是)(t y 满足 bxy dy bx d y t y +-=+-=')()( (2) 比例系数b 反映食饵对捕食者的供养能力。
实验一--控制系统的稳定性分析
实验一控制系统的稳定性分 班级:光伏2班 姓名:王永强 学号:1200309067
实验一控制系统的稳定性分析 一、实验目的 1、研究高阶系统的稳定性,验证稳定判据的正确性; 2、了解系统增益变化对系统稳定性的影响;
3、观察系统结构和稳态误差之间的关系。 二、实验任务 1、稳定性分析 欲判断系统的稳定性,只要求出系统的闭环极点即可,而系统的闭环极点就是闭环传递函数的分母多项式的根,可以利用MATLAB中的tf2zp函数求出系统的零极点,或者利用root函数求分母多项式的根来确定系统的闭环极点,从而判断系统的稳定性。 (1)已知单位负反馈控制系统的开环传递 函数为 0.2( 2.5) () (0.5)(0.7)(3) s G s s s s s + = +++,用MATLAB编写 程序来判断闭环系统的稳定性,并绘制闭环系统的零极点图。 在MATLAB命令窗口写入程序代码如下:z=-2.5 p=[0,-0.5,-0.7,-3] k=1 Go=zpk(z,p,k)
Gc=feedback(Go,1) Gctf=tf(Gc) dc=Gctf.den dens=ploy2str(dc{1},'s') 运行结果如下: Gctf = s + 2.5 --------------------------------------- s^4 + 4.2 s^3 + 3.95 s^2 + 2.05 s + 2.5 Continuous-time transfer function. dens是系统的特征多项式,接着输入如下MATLAB程序代码: den=[1,4.2,3.95,1.25,0.5] p=roots(den)
生物模型:设生物群体的数量N 是时间t 连续函数. 物种捕食模型: 捕食者P 的存在依赖于被捕食者的存在, 增长率由于被捕食者N 的存在而增大, 没有被捕食者时将自然趋向死亡. 被捕食者N 的增长率由于捕食者P 的存在而减少, 模型为 ???????+-=-=P N c r t N P c r t N p n )(d dP )(d d 21 (12) 其中 21,,,c c r r p n >0是常数. 相空间为N ≥0, P ≥0, 奇点有两个, (0, 0) 和 (N *, P *) = )/,/(12c r c r n p , 当N , P 不等于零时, 轨道方程可由方程的两式消去d t 而得变量分离方程; 0d d d d 12=-+-P P r P c N N r N c n p (13) 从点(N *, P *)积分到点(N , P )得 C P P P P r N N N N r P N H n p =--+--=]* ln )1*[(]*ln )1*[(:),( (14) 由不等式 0ln 1:)(≥--=x x x f , 对任意x >0恒成立, 且当x 1≠ 时, 0)(>x f , )(x f 在),1[∞上从零严格单调增加到无穷大. )(x f 在]1,0(上从无穷大严格单调减少到零. 因此, ),(P N H 关于(N *,P *)点是定正函数, 且在从(N *,P *)点出发的任一射线上随着与(N *,P *)点的距离增加而从零严格单调增加至无穷大. 因此对于任一 C > 0, 轨道方程(14)表示一条闭轨, 对应于方程的周期解. 设其周期为T =T (C ), 我们可以证明在闭轨上N , P 的平均值分别为N *, P *. 证: ???==--=-0d 1)(d *) (d )*(220P P c P r N c P N N t N N p T , 同理可证另一个关系式.
摘要 本文给出了微分方程稳定性的概念,并举了一些例子来说明不同稳定性定义之间的区别和联系。这些例子都是通过求出方程解析解的方法来讨论零解是否稳定。在实际问题中提出的微分方程往往是很复杂的,无法求出其解析解,这就需要我们从方程本身来判断零解的稳定性。所以我们讨论了通过Liapunov稳定性定理来判断自治系统零解的稳定性,并用类似的方法讨论了非自治系统零解的稳定性。在此基础上,讨论了一阶和二阶微分方程的平衡点及其稳定性,这对其研究数学建模的稳定性模型起到很大的作用,并且利用相关的差分方程的全局吸引性研究了具时滞的单种群模型 ()()()() () .1 1N t N t r t N t cN t ττ -- = -- 的平衡点1 x=的全局吸引性,所获结果改进了文献中相关的结论。关键词:自治系统平衡点稳定性全局吸引性
Abstract In this paper,we gived the conceptions of differential equation stability. Simultaneously a number of examples to illustrate the difference between the definition of different stability and contact. These examples are obtained by analytical solution equation method to discuss the stability of zero solution. Practical issues raised in the often very complicated differential equations, analytical solution can not be obtained, which requires us to determine from the equation itself, the stability of zero solution. So we discussed the stability theorem to determine through the stability of zero solution of autonomous systems, and use similar methods to discuss the non-zero solution of autonomous system stability. On this basis,we discuss a step and the second-step and the stability, which plays the major role to its stability of the model, and the global attractivity of the positive equilibrium 1 x=of the following delay single population model ()()()() () .1 1N t N t r t N t cN t ττ -- = -- is investigated by using the corresponding result related to a difference equation.The obtained results improve some known results in the literature. Key Words:autonomous system;equilibrium point;stability;delay;globally asymptotic stability;global attractivity
西京学院实验教学教案实验课程:现代控制理论基础 课序: 4 教室:工程舫0B-14实验日期:2013-6-3、4、6 教师:万少松 一、实验名称:系统的稳定性及极点配置二、实验目的 1.巩固控制系统稳定性等基础知识;2.掌握利用系统特征根判断系统稳定性的方法;3.掌握利用李雅普诺夫第二法判断系统的稳定性的方法;4. 掌握利用状态反馈完成系统的极点配置;5.通过Matlab 编程,上机调试,掌握和验证所学控制系统的基本理论。三、实验所需设备及应用软件序号 型 号备 注1 计算机2Matlab 软件四、实验内容1. 利用特征根判断稳定性;2. 利用李雅普诺夫第二法判断系统的稳定性;3.状态反馈的极点配置;五、实验方法及步骤1.打开计算机,运行MATLAB 软件。2.将实验内容写入程序编辑窗口并运行。3.分析结果,写出实验报告。 语文电气课件中管壁薄、接口不严等问题,合理利用管线敷设技术。线缆敷设原则:在分线盒处,当不同电压回路交叉时,应采用金属隔板进行隔开处动过程中高中资料试卷电气设备进行调试工作并且进行过关运行高中资料试卷技术指导。对于调试过程中高中资料试卷技术问题,作为调试人员,需要然停机。因此,电力高中资料试卷保护装置调试技术,要求电力保护装置做到准确灵活。对于差动保护装置高中资料试卷调试技术是指发电机一变压器
一、利用特征根判断稳定性 用matlab 求取一个系统的特征根,可以有许多方法,如,,,()eig ()pzmap 2ss zp ,等。下面举例说明。 2tf zp roots 【例题1】已知一个系统传递函数为,试不同的方法分析闭环系统的稳定性。()G s 2(3)()(5)(6)(22)s G s s s s s += ++++解:num=[1,3]den=conv([1,2,2],conv([1,6],[1,5]))sys=tf(num,den)(1)() eig p=eig(sys)显示如下:p = -6.0000 -5.0000 -1.0000 + 1.0000i -1.0000 - 1.0000i 所有的根都具有负的实部,所以系统稳定。(2) ()pzmap pzmap(sys) 从绘出的零极点图可看见,系统的零极点都位于左半平面,系统稳定。(3)2()tf zp [z,p,k]=tf2zp(num,den) (4)()roots roots(den)【例题2】已知线性定常连续系统的状态方程为122122x x x x x ==- 试用特征值判据判断系统的稳定性。 解: A=[0,1;2,-1] eig(A)
性能稳定性分析 1功角的具体含义。 电源电势的相角差,发电机q轴电势与无穷大系统电源电势之间的相角差。 电磁功率的大小与δ密切相关,故称δ为“功角”或“功率角”。电磁功率与功角的关系式被称为“功角特性”或“功率特性”。 功角δ除了表征系统的电磁关系之外,还表明了各发电机转子之间的相对空间位置。 2功角稳定及其分类。 电力系统稳态运行时,系统中所有同步发电机均同步运行,即功角δ是稳定值。系统在受到干扰后,如果发电机转子经过一段时间的运动变化后仍能恢复同步运行,即功角δ能达到一个稳定值,则系统就是功角稳定的,否则就是功角不稳定。 根据功角失稳的原因和发展过程,功角稳定可分为如下三类: 静态稳定(小干扰) 暂态稳定(大干扰) 动态稳定(长过程) 3电力系统静态稳定及其特点。 定义:指电力系统在某一正常运行状态下受到小干扰后,不发生自发振荡或非周期性失步,自动恢复到原始运行状态的能力。如果能,则认为系统在该正常运行状态下是静态稳定的。不能,则系统是静态失稳的。 特点:静态稳定研究的是电力系统在某一运行状态下受到微小干扰时的稳定性问题。系统是否能够维持静态稳定主要与系统在扰动发生前的原始运行状态有关,而与小干扰的大小、类型和地点无关。 4电力系统暂态稳定及其特点。 定义:指电力系统在某一正常运行状态下受到大干扰后,各同步发电机保持同步运行并过渡到新的或恢复到原来的稳态运行状态的能力。通常指第一或第二振荡周期不失步。如果能,则认为系统在该正常运行状态下该扰动下是暂态稳定的。不能,则系统是暂态失稳的。 特点:研究的是电力系统在某一运行状态下受到较大干扰时的稳定性问题。系统的暂态稳定性不仅与系统在扰动前的运行状态有关,而且与扰动的类型、地点及持续时间均有关。 作业2 5发电机组惯性时间常数的物理意义及其与系统惯性时间常数的关系。 表示在发电机组转子上加额定转矩后,转子从停顿状态转到额定转速时所经过的时间。TJ=TJG*SGN/SB 6例题6-1 (P152) (补充知识:当发电机出口断路器断开后,转子做匀加速旋转。汽轮发电机极对数p=1。额定频率为50Hz。要求列写每个公式的来源和意义。)题目:已知一汽轮发电机的惯性时间常数Tj=10S,若运行在输出额定功率状态,在t=0时其出口处突然断开。试计算(不计调速器作用) (1)经过多少时间其相对电角度(功角)δ=δ0+PAI.(δ0为断开钱的值)(2)在该时刻转子的转速。 解:(1)Tj=10S,三角M*=1,角加速度d2δ/dt2=三角M*W0/Tj=W0/10=31.4RAD/S2 δ=δ0+0.5dd2δ/dt2 所以PI=0.5*2PI*f/10t方 t=更号10/50=0.447 (2)t=0.447时,
楚雄师范学院数学系《数学建模》课程 教学论文 题目:具有自身阻滞作用的两种群食饵—捕食模型 专业:信息与计算科学 班级:08级3班 学号:152 学生姓名:罗文枢 完成日期:2011 年 6 月
具有自身阻滞作用的两种群食饵—捕食模型 摘要:在自然界中,更多的生物是杂居在一起的,各种生物根据其生理特点、食物来源分成了不同的层次,各层次之间及同一层次的生物种群之间有着各样的联系,尤其是相互之间影响非常大的生物种群,需要放在一起讨论,在这里,我们一两种群为例进行建模和讨论,具有自身阻滞作用的两种群食饵—捕食者模型。捕食—食饵模型是数学生态学研究的重要内容,影响种群波动的因素很多,自身阻滞作用就是其中重要的一种因素。因为资源环境是有限的,相互竞争是不可避免的,所以自身阻滞也是影响平衡位置的不稳定性和周期波动现象的主要因素。时滞可以对生态系统的性质产生相当大的影响,理论生态学家们普遍认为在种群的相互作用中,自身阻滞作用是不可避免的。本文主要通过对两类具有自身阻滞作用的典型的捕食-食饵模型的研究,通过分析发现时滞对模型的稳定性有非常重要的作用。事实上只要在Volterra模型加入考虑自身阻滞作用的Logsitic项就可以得到这种现象了。 关键字:自身阻滞,稳定性分析,相轨线分析,平衡点分析,Logistic模型;
一.问题重述: 讨论具有自身阻滞作用的两种群食饵—捕食者模型,首先根据两种群的相互关系建立模型,解释参数的意义,然后进行稳定性分析,解释平衡点稳定的实际意义,对模型进行相轨线分析来验证理论分析的正确性。 二.问题分析: 本论文主要是讨论具有自身阻滞作用的食饵—捕食者模型。我们用Logistic模型来描述这个种群数量的演变过程,即食饵会受到自然界中的资源所限制,它不仅会无限的增大,而且捕食者也会受到食饵的数量的影响。此种情况下会出现以下的3种现象: 1.当捕食者灭绝时,食饵也不会无限的增长,即指数函数型增长,因为有自身的阻滞作用,它达到某个数量就不在会增长而趋于稳定了; 2.当食饵受到自然资源的影响的灭绝时,捕食者也会因食物而灭绝; 3.当两种群都不灭绝时,它们会趋于某个非零的有限值,从而达到稳定状态。 三.模型假设: 1.假设在某特定环境中只存在食饵和捕食者两种群; 2.假设食饵和捕食者均能正常生长,没有疾病等原因促使死亡; 3.假设两种群的增长率不变; 4.食饵由于捕食者的存在使增长率降低,假设降低的程度与捕食者数量成正比; 5.捕食者由于食饵为它提供食物的作用使其死亡率降低或使之增长,假设增长的程度与食饵数量成正比。 四.符号说明: ()t x :食饵在时刻t的数量; 1 ()t x :捕食者在时刻t的数量; 2 R:食饵独立生存时以指数规律增长,相对增长率; 1 R:捕食者独立生存时以指数规律增长,相对增长率; 2 N:食饵生存的最大容量; 1 N:捕食者生存的最大容量; 2
实验二 控制系统的阶跃响应及稳定性分析 一、实验目的及要求: 1.掌握控制系统数学模型的基本描述方法; 2.了解控制系统的稳定性分析方法; 3.掌握控制时域分析基本方法。 二、实验内容: 1.系统数学模型的几种表示方法 (1)传递函数模型 G(s)=tf() (2)零极点模型 G(s)=zpk(z,p,k) 其中,G(s)= 将零点、极点及K值输入即可建立零极点模型。 z=[-z1,-z …,-z m] p=[-p1,-p …,-p] k=k (3)多项式求根的函数:roots ( ) 调用格式: z=roots(a) 其中:z — 各个根所构成的向量 a — 多项式系数向量 (4)两种模型之间的转换函数: [z ,p ,k]=tf2zp(num , den) %传递函数模型向零极点传递函数的转换 [num , den ]=zp2tf(z ,p ,k) %零极点传递函数向传递函数模型的转换 (5)feedback()函数:系统反馈连接
调用格式:sys=feedback(s1,s2,sign) 其中,s1为前向通道传递函数,s2为反馈通道传递函数,sign=-1时,表示系统为单位负反馈;sign=1时,表示系统为单位正反馈。 2.控制系统的稳定性分析方法 (1)求闭环特征方程的根(用roots函数); 判断以为系统前向通道传递函数而构成的单位负反馈系统的稳定性,指出系统的闭环特征根的值: 可编程如下: numg=1; deng=[1 1 2 23]; numf=1; denf=1; [num,den]= feedback(numg,deng,numf,denf,-1); roots(den) (2)化为零极点模型,看极点是否在s右半平面(用pzmap); 3.控制系统根轨迹绘制 rlocus() 函数:功能为求系统根轨迹 rlocfind():计算给定根的根轨迹增益 sgrid()函数:绘制连续时间系统根轨迹和零极点图中的阻尼系数和自然频率栅格线 4.线性系统时间响应分析 step( )函数---求系统阶跃响应 impulse( )函数:求取系统的脉冲响应 lsim( )函数:求系统的任意输入下的仿真 三、实验报告要求:
食饵——捕食者模型 摘要 自然界中不同种群之间存在着一种有趣的既有依存,又有制约的生存方式:种群甲靠丰富的自然资源生长,而种群乙靠捕食种群甲为生。生态学上称种群甲为食饵)(Pr ey ,种群乙为捕食者)(Pr edator ,二者共处组成食饵——捕食者系统(简称P P -系统)。为了对食饵、捕食者的数量关系做出分析和预测,建立了食饵——捕食者模型:根据微分方程稳定性理论辅之以相轨线分析,对具有自身阻滞作用的两种群的数量关系做出分析和预测。 关键词 食饵——捕食者,模型,生态学,Logistic 规律。 问题重述 讨论具有自身阻滞作用的两种群食饵——捕食者模型,首先根据两种群的相互关系建立模型,解释参数的意义,然后进行稳定性分析,解释平衡点稳定的实际意义,对模型进行相轨线分析来验证理论分析的正确性。 模型建立 种群甲(食饵)靠丰富的自然资源生长,而种群乙(捕食者)靠捕食种群甲为生,食饵(甲)和捕食者(乙)在t 时刻的数量分别记为)(t x ,)(t y ,r 是甲的固有增长率,种群甲和乙的最大容量分别为N 、M 。数量的演变均遵从Logistic 规律。于是对种群甲有 )1()(N x rx t x -= 其中因子)1(N x -反映由于甲对有限资源的消耗导致的对它本身增长的阻滞作用, N x 可解释为相对于N 而言单位数量的甲消耗别的供养甲的食物量(设食物总量为1)。 当两个种群在同一自然环境中生存时,考察由于乙消耗同一种有限资源对甲 的增长产生的影响,可以合理的在因子)1(N x -中再减去一项,该项与种群乙的 数量y (相对于M 而言)成正比,于是得到种群甲增长的方程为 )1()(1M y N x rx t x σ--= (1) 这里的意义是:单位数量乙(相对于M 而言)消耗的供养甲的食物量为单位数 量甲(相对N )消耗的供养甲的食物量的1σ倍。
2009年11月 襄樊学院学报 Nov.,2009 第30卷第11期 Journal of Xiangfan University V ol.30 No.11 捕食者死亡率具比率型的捕食者-食饵模型 肖氏武1 ,陈旭松2 (1.襄樊学院 数学与计算机科学学院,湖北 襄樊 441053; 2.襄樊职业技术学院 公共课部,湖北 襄樊 441021) 摘要 :建立捕食者死亡率依赖于捕食者与食饵的比率的捕食-食饵模型,分别考虑捕食者的 功能性反应为双线性型与比率依赖型的情形,在一定条件下得到正平衡点全局稳定和极限环的存 在性,并进行了数值模拟. 关键词:比率依赖;捕食者-食饵模型;极限环 中图分类号:O175. 1 文献标识码:A 文章编号:1009-2854(2009)11-0009-05 在现实世界里,任何生物种群都处于某一群落中与别的种群发生着一定的联系,而真正的单种群只有在生物学家的实验室里才存在. 由于捕食者与食饵的这种捕食现象在自然界中普遍存在且相当重要,因此研究捕食者与食饵之间的动力学关系已经是并将长期成为生物界与生物数学方面的重要研究课题之一[1-3]. 虽然在过去的四十多年里,捕食者-食饵理论取得了很大的进步,但是在这方面还是有很多数学和生态学上的问题没解决[3-6]. 在捕食者-食饵相互作用的理论的研究中,一个具有里程碑的进展是被Hairston N. G . [7]和 Rosenzweig M. L.[8]等人揭示的现在被称为富足性谬论(Paradox of enrichment)的发现. 在生物数学领域中,数学家的很多工作被看作是数学对生物学的重要贡献. 直到现在,在生态学家之间对此也引起争议. 当然,争论的焦点并不是模型的数学分析,而是建立的模型本身. 最近,有很多确定的生物和生物物理证据[9-10]显示,在很多情况下,特别是当捕食者必须寻找食物(因此必须分享或竞争食物)时,一个更合理的捕食者-食饵理论应该建立在所谓的比率依赖理论的基础之上. 比率依赖是指每一个捕食者个体的增长率应该是关于食饵与捕食者数量的比的函数,因此,又称之为捕食者功能性反应. 这些理论为众多的领域和实验及观察结果所支持[9, 11]. 一般地,具比率型的捕食者-食饵模型可取如下形式 ()()()()dx x x x yp dt y dy x cyq r y dt y ??=?????=??? 1 基本模型 Tanner J. T. 提出一类被称为Holling-Tanner 的混合型捕食者-食饵模型[12-13] (1)(1)dx x cxy ax dt K x m dy fy dy dt x ?=????+??=??? 这里,,,,,,a K c m f d 为正常数,其生物意义显然可知. 基本假设是如果食饵密度x 为常数,捕食者的捕获力为x f . 显然,Holling--Tanner 模型中关于捕食者的方程类似于比率依赖型,而关于食饵的方程是典型的 收稿日期:2009-08-17 作者简介:肖氏武(1971— ), 男, 湖北天门人, 襄樊学院数学与计算机科学学院副教授.
实验一控制系统的稳定性分析 一、实验目的 1.观察系统的不稳定现象。 2.研究系统开环增益和时间常数对稳定性的影响。 二、实验仪器 1.自动控制系统实验箱一台 2.计算机一台 三、实验内容 系统模拟电路图如图 系统模拟电路图 其开环传递函数为: G(s)=10K/s(0.1s+1)(Ts+1) 式中 K1=R3/R2,R2=100KΩ,R3=0~500K;T=RC,R=100KΩ,C=1μf或C=0.1μf两种情况。 四、实验步骤 1.连接被测量典型环节的模拟电路。电路的输入U1接A/D、D/A卡的DA1输出,电路的 输出U2接A/D、D/A卡的AD1输入,将纯积分电容两端连在模拟开关上。检查无误后接通电源。 2.启动计算机,在桌面双击图标 [自动控制实验系统] 运行软件。 3.在实验项目的下拉列表中选择实验三[控制系统的稳定性分析] 5.取R3的值为50KΩ,100KΩ,200KΩ,此时相应的K=10,K1=5,10,20。观察不同R3 值时显示区内的输出波形(既U2的波形),找到系统输出产生增幅振荡时相应的R3及K值。再把电阻R3由大至小变化,即R3=200kΩ,100kΩ,50kΩ,观察不同R3值
时显示区内的输出波形, 找出系统输出产生等幅振荡变化的R3及K值,并观察U2的输出波形。 五、实验数据 1模拟电路图 2.画出系统增幅或减幅振荡的波形图。 C=1uf时: R3=50K K=5:
R3=100K K=10 R3=200K K=20:
等幅振荡:R3=220k: 增幅振荡:R3=220k:
R3=260k: C=0.1uf时:
楚雄师范学院数学系《数学模型》课程 食饵—捕食者模型 3. 讨论具有自身阻滞作用的两种群食饵-捕食者模型,首先根据该两种群的相互关系建立模型,解释参数的意义,然后进行稳定性分析,解释平衡点稳定的实际意义,对模型进行相轨线分析来验证理论分析的正确性,并用matlab 软件画出图形。 自然界中不同种群之间还存在着一种非常有趣的既有相互依存、又有相互制约的生活方式:种群甲靠丰富的天然资源生长,而种群乙靠捕食甲为生,形成鱼和鲨鱼,美洲兔和山猫,落叶松和蚜虫等等都是这种生存方式的典型,生态学称种群甲为食饵,种群乙为捕食者。二者共同组成食饵—捕食者系统。 一食饵—捕食者 选用食饵(食用鱼)和捕食者(鲨鱼)为研究对象,设)(t x /)(1t x 为食饵(食用鱼)在时刻t 的数量,)(t y /)(2t x 为捕食者(鲨鱼)在时刻t 的数量,1r 为食饵(食用鱼)的相对增长率,2r 为捕食者(鲨鱼)的相对增长率;1N 为大海中能容纳的食饵(食用鱼)的最大容量,2N 为大海中能容纳的捕食者(鲨鱼)的最大容量,1σ为单位数量捕食者(相对于2N )提供的供养食饵的实物量为单位数量捕食者(相对于1N )消耗的供养甲实物量的1σ倍;2σ为单位数量食饵(相对于1N )提供的供养捕食者的实物量为单位数量捕食者(相对于2N )消耗的供养食饵实物量的2σ倍;d 为捕食者离开食饵独立生存时的死亡率 二模型假设 1.假设捕食者(鲨鱼)离开食饵无法生存;
2.假设大海中资源丰富,食饵独立生存时以指数规律增长; 三模型建立 食饵(食用鱼)独立生存时以指数规律增长,且食饵(食用鱼)的相对增长率为 1r ,即rx x =',而捕食者的存在使食饵的增长率减小,设减小的程度与捕食者数 量成正比,于是)(t x 满足方程 axy rx ay r x t x -=-=')()( (1) 比例系数a 反映捕食者掠取食饵的能力。 由于捕食者离开食饵无法生存,且它独立生存时死亡率为d ,即dy y -=',而食饵的存在为捕食者提供了食物,相当于使捕食者的死亡率降低,且促使其增长。设这种作用与食饵数量成正比,于是)(t y 满足 bxy dy bx d y t y +-=+-=')()( (2) 比例系数b 反映食饵对捕食者的供养能力。 方程(1)、(2)是在自然环境中食饵和捕食者之间依存和制约的关系,这里没有考虑种群自身的阻滞作用,是Volterra 提出的最简单的模型。结果如下。 不考虑自身阻滞作用:数值解 令x(0)=x0,y(0)=0,设r=1,d=0.5,a=0.1,b=0.02,x0=25,y0=2 使用Matlab 求解 求解如下 1)先建立M 文件 function xdot=shier(t,x) r=1;d=0.5;a=0.1;b=0.02; xdot=[(r-a*x(2)).*x(1);(-d+b*x(1)).*x(2)]; 2)在命令窗口输入如下命令: ts=0:0.1:15; >> x0=[25,2]; >> [t,x]=ode45('shier',ts,x0);[t,x],
. Matlab在控制系统稳定性判定中的应用 稳定是控制系统的重要性能,也是系统能够工作的首要条件,因此,如何分析系统的稳定性并找出保证系统稳定的措施,便成为自动控制理论的一个基本任务.线性系统的稳定性取决于系统本身的结构和参数,而与输入无关.线性系统稳定的条件是其特征根均具有负实部. 在实际工程系统中,为避开对特征方程的直接求解,就只好讨论特征根的分布,即看其是否全部具有负实部,并以此来判别系统的稳定性,由此形成了一系列稳定性判据,其中最重要的一个判据就是劳斯判据。劳斯判据给出线性系统稳定的充要条件是:系统特征方程式不缺项,且所有系数均为正,劳斯阵列中第一列所有元素均为正号,构造劳斯表比用求根判断稳定性的方法简单许多,而且这些方法都已经过了数学上的证明,是完全有理论根据的,是实用性非常好的方法. 具体方法及举例: 一用系统特征方程的根判别系统稳定性 设系统特征方程为s5+s4+2s3+2s2+3s+5=0,计算特征根并判别该系统的稳定性。在command window窗口输入下列程序,记录输出结果。 >> p=[1 1 2 2 3 5]; >> roots(p) 二用根轨迹法判别系统稳定性:对给定的系统的开环传递函数 1.某系统的开环传递函数为,在command window窗口输入程序,记录系统闭环零极点图及零极点数据,判断该闭环系统是否稳定。 >> clear >> n1=[0.25 1]; >> d1=[0.5 1 0]; >> s1=tf(n1,d1);
. >> sys=feedback(s1,1); >> P=sys.den{1};p=roots(P) >> pzmap(sys) >> [p,z]=pzmap(sys) 2
微分方程平衡点及其稳定性理论 这里简单介绍下面将要用到的有关内容: 一、 一阶方程的平衡点及稳定性 设有微分方程 ()dx f x dt = (1) 右端不显含自变量t ,代数方程 ()0f x = (2) 的实根0x x =称为方程(1)的平衡点(或奇点),它也是方程(1)的解(奇解) 如果从所有可能的初始条件出发,方程(1)的解()x t 都满足 0lim ()t x t x →∞ = (3) 则称平衡点0x 是稳定的(稳定性理论中称渐近稳定);否则,称0x 是不稳定的(不渐近稳定)。 判断平衡点0x 是否稳定通常有两种方法,利用定义即(3)式称间接法,不求方程(1)的解()x t ,因而不利用(3)式的方法称直接法,下面介绍直接法。 将()f x 在0x 做泰勒展开,只取一次项,则方程(1)近似为: 0'()()dx f x x x dt =- (4) (4)称为(1)的近似线性方程。0x 也是(4)的平衡点。关于平衡点0x 的稳定性有如下的结论: 若0'()0f x <,则0x 是方程(1)、(4)的稳定的平衡点。 若0'()0f x >,则0x 不是方程(1)、(4)的稳定的平衡点 0x 对于方程(4)的稳定性很容易由定义(3)证明,因为(4)的一般解是 0'()0()f x t x t ce x =+ (5) 其中C 是由初始条件决定的常数。
二、 微分方程组的平衡点和稳定性 方程的一般形式可用两个一阶方程表示为 112212()(,)()(,)dx t f x x dt dx t g x x dt ?=????=?? (6) 右端不显含t ,代数方程组 1212 (,)0(,)0f x x g x x =??=? (7) 的实根0012 (,)x x 称为方程(6)的平衡点。记为00012(,)P x x 如果从所有可能的初始条件出发,方程(6)的解12(),()x t x t 都满足 101lim ()t x t x →∞= 202lim ()t x t x →∞ = (8) 则称平衡点00012(,)P x x 是稳定的(渐近稳定);否则,称P 0是不稳定的(不渐 近稳定)。 为了用直接法讨论方法方程(6)的平衡点的稳定性,先看线性常系数方程 1111222122()()dx t a x b x dt dx t a x b x dt ?=+????=+?? (9) 系数矩阵记作 1122a b A a b ??=???? 并假定A 的行列式det 0A ≠ 于是原点0(0,0)P 是方程(9)的唯一平衡点,它的稳定性由的特征方程 det()0A I λ-= 的根λ(特征根)决定,上方程可以写成更加明确的形式: 2120()det p q p a b q A λλ?++=?=-+??=? (10) 将特征根记作12,λλ,则
本文给出了微分方程稳定性的概念,并举了一些例子来说明不同稳定性定义之间的区别和联系。这些例子都是通过求出方程解析解的方法来讨论零解是否稳定。在实际问题中提出的微分方程往往是很复杂的,无法求出其解析解,这就需要我们从方程本身来判断零解的稳定性。所以我们讨论了通过Liapunov稳定性定理来判断自治系统零解的稳定性,并用类似的方法讨论了非自治系统零解的稳定性。在此基础上,讨论了一阶和二阶微分方程的平衡点及其稳定性,这对其研究数学建模的稳定性模型起到很大的作用,并且利用相关的差分方程的全局吸引性研究了具时滞的单种群模型 ()()()() () .1 1N t N t r t N t cN t ττ -- = -- 的平衡点1 x=的全局吸引性,所获结果改进了文献中相关的结论。 关键词:自治系统平衡点稳定性全局吸引性 Abstract In this paper,we gived the conceptions of differential equation stability. Simultaneously a number of examples to illustrate the difference between the definition of different stability and contact. These examples are obtained by analytical solution equation method to discuss the stability of zero solution. Practical issues raised in the often very complicated differential equations, analytical solution can not be obtained, which requires us to determine from the equation itself, the stability of zero solution. So we discussed the stability theorem to determine through the stability of zero solution of autonomous systems, and use similar methods to discuss the non-zero solution of autonomous system stability. On this basis,we discuss a step and the second-step and the stability, which plays the major role to its stability of the model, and the global attractivity of the positive equilibrium 1 x=of the following delay single population model ()()()() () .1 1N t N t r t N t cN t ττ -- = -- is investigated by using the corresponding result related to a difference equation.The obtained results improve some known results in the literature. Key Words:autonomous system;equilibrium point;stability;delay;globally asymptotic stability;global attractivity
精品 实验题目控制系统的稳定性分析 一、实验目的 1.观察系统的不稳定现象。 2.研究系统开环增益和时间常数对稳定性的影响。 二、实验仪器 1.EL-AT-II型自动控制系统实验箱一台 2.计算机一台 三、系统模拟电路图 系统模拟电路图如图3-1 图3-1 系统模拟电路图R3=0~500K; C=1μf或C=0.1μf两种情况。 四、实验报告 1.根据所示模拟电路图,求出系统的传递函数表达式。 G(S)= K=R3/100K,T=CuF/10 2.绘制EWB图和Simulink仿真图。
精品 3.根据表中数据绘制响应曲线。 4.计算系统的临界放大系数,确定此时R3的值,并记录响应曲线。 系统响应曲线 实验曲线Matlab (或EWB)仿真 R3=100K = C=1UF 临界 稳定 (理论值 R3= 200K) C=1UF
精品 临界 稳定 (实测值 R3= 220K) C=1UF R3 =100K C= 0.1UF
精品 临界 稳定 (理论 值R3= 1100 K) C=0.1UF 临界稳定 (实测值 R3= 1110K ) C= 0.1UF
精品 实验和仿真结果 1.根据表格中所给数据分别进行实验箱、EWB或Simulink实验,并进行实验曲线对比,分析实验箱的实验曲线与仿真曲线差异的原因。 对比: 实验曲线中R3取实验值时更接近等幅振荡,而MATLAB仿真时R3取理论值更接近等幅振荡。 原因: MATLAB仿真没有误差,而实验时存在误差。 2.通过实验箱测定系统临界稳定增益,并与理论值及其仿真结果进行比较(1)当C=1uf,R3=200K(理论值)时,临界稳态增益K=2, 当C=1uf,R3=220K(实验值)时,临界稳态增益K=2.2,与理论值相近(2)当C=0.1uf,R3=1100K(理论值)时,临界稳态增益K=11 当C=0.1uf,R3=1110K(实验值)时,临界稳态增益K=11.1,与理论值相近 四、实验总结与思考 1.实验中出现的问题及解决办法 问题:系统传递函数曲线出现截止失真。 解决方法:调节R3。 2.本次实验的不足与改进 遇到问题时,没有冷静分析。考虑问题不够全面,只想到是实验箱线路的问题,而只是分模块连接电路。 改进:在实验老师的指导下,我们发现是R3的取值出现了问题,并及时解决,后续问题能够做到举一反三。 3.本次实验的体会 遇到问题时应该冷静下来,全面地分析问题。遇到无法独立解决的问题,要及时请教老师,
被捕食者—捕食者模型稳定性分析 【摘要】自然界中不同种群之间还存在着一种非常有趣的既有相互依存、又有相互制约的生活方式:种群甲靠丰富的天然资源生存,种群乙靠捕食甲为生,形成食饵-捕食者系统,如食用鱼和鲨鱼,美洲兔和山猫,害虫和益虫等。本文是基于食饵—捕食者之间的有关规律,建立具有自身阻滞作用的两种群食饵—捕食者模型,分析平衡点的稳定性,进行相轨线分析,并用数值模拟方法验证理论分析的正确性。 【关键词】食饵—捕食者模型相轨线平衡点稳定性
一、问题重述 在自然界中,存在这种食饵—捕食者关系模型的物种很多。下面讨论具有自身阻滞作用的两种群食饵-捕食者模型,首先根据该两种群的相互关系建立模型,解释参数的意义,然后进行稳定性分析,解释平衡点稳定的实际意义,对模型进行相轨线分析来验证理论分析的正确性。 二、问题分析 本文选择渔场中的食饵(食用鱼)和捕食者(鲨鱼)为研究对象,建立微分方 程,并利用数学软件MATLAB 求出微分方程的数值解,通过对数值结果和图形的观察,猜测出它的解析解构造。然后,从理论上研究其平衡点及相轨线的形状,验证前面的猜测。 三、模型假设 1.假设捕食者(鲨鱼)离开食饵无法生存; 2.假设大海中资源丰富,食饵独立生存时以指数规律增长; 四、符号说明 )(t x /)(1t x ——食饵(食用鱼)在时刻t 的数量; )(t y /)(2t x ——捕食者(鲨鱼)在时刻t 的数量; 1r ——食饵(食用鱼)的相对增长率; 2r ——捕食者(鲨鱼)的相对增长率; 1N ——大海中能容纳的食饵(食用鱼)的最大容量;
2N ——大海中能容纳的捕食者(鲨鱼)的罪的容量; 1σ——单位数量捕食者(相对于2N )提供的供养食饵的实物量为单位数量捕食者(相对于1N )消耗的供养甲实物量的1σ倍; 2σ——单位数量食饵(相对于1N )提供的供养捕食者的实物量为单位数量捕食者(相对于2N )消耗的供养食饵实物量的2σ倍; d ——捕食者离开食饵独立生存时的死亡率。 五、模型建立 食饵独立生存时以指数规律增长,且食饵(食用鱼)的相对增长率为1r ,即 rx x =',而捕食者的存在使食饵的增长率减小,设减小的程度与捕食者数量成正比,于是)(t x 满足方程 axy rx ay r x t x -=-=')()( (1) 比例系数a 反映捕食者掠取食饵的能力。 由于捕食者离开食饵无法生存,且它独立生存时死亡率为d ,即dy y -=',而食饵的存在为捕食者提供了食物,相当于使捕食者的死亡率降低,且促使其增长。设这种作用与食饵数量成正比,于是)(t y 满足 bxy dy bx d y t y +-=+-=')()( (2) 比例系数b 反映食饵对捕食者的供养能力。