
3、空间一般力系
3.1内容提要
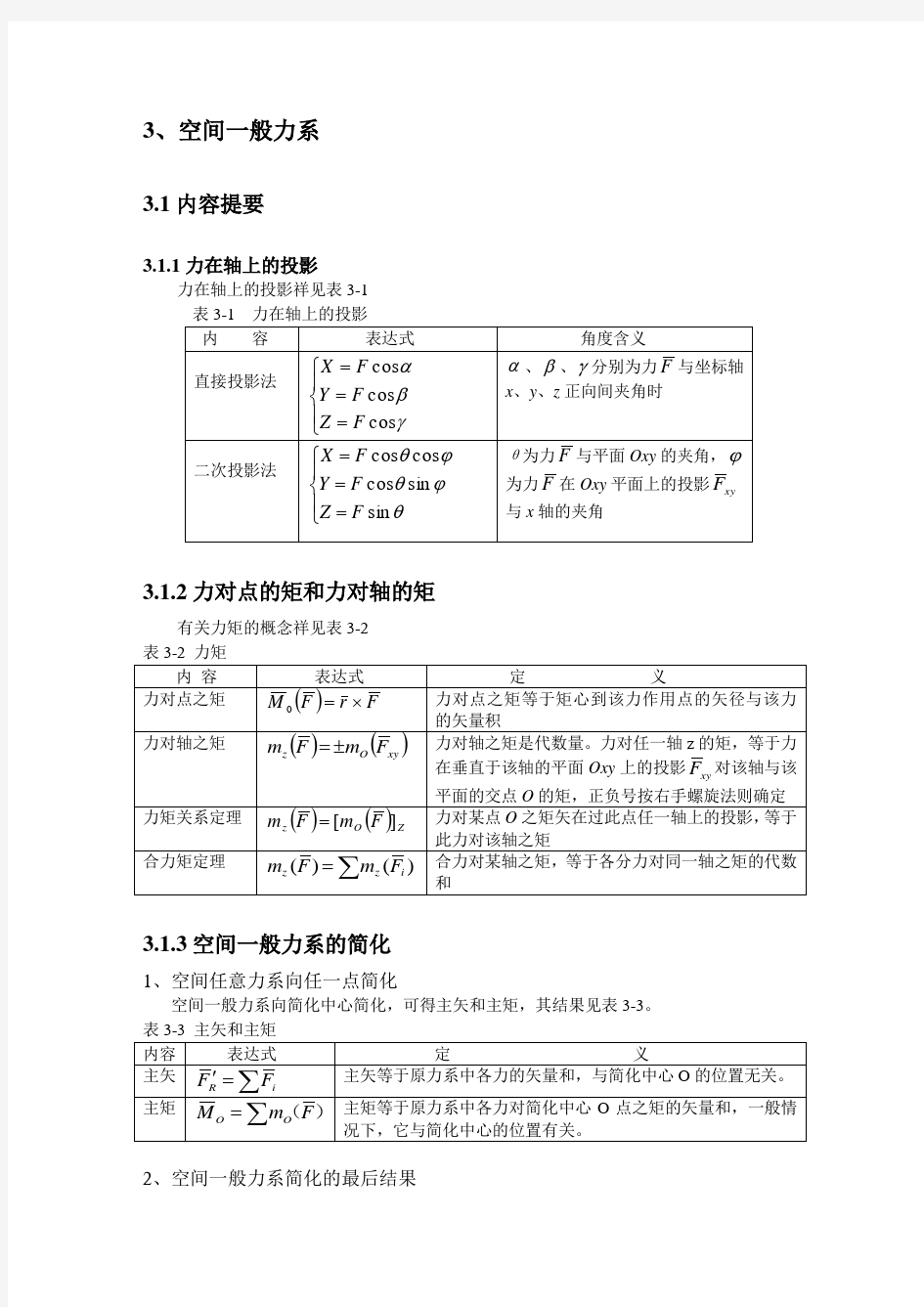
3.1.1力在轴上的投影
力在轴上的投影祥见表3-1
表3-1 力在轴上的投影
3.1.2力对点的矩和力对轴的矩
有关力矩的概念祥见表3-2
3.1.3空间一般力系的简化
1、空间任意力系向任一点简化
空间一般力系向简化中心简化,可得主矢和主矩,其结果见表3-3。
2、空间一般力系简化的最后结果
空间一般力系简化的最后结果见表3-4
3.1.4空间一般力系的平衡
空间一般力系是力系的最一般形式,其平衡的充要条件是,力系的主矢和对任一点O 的主矩都等于零,即
0='R F ,00=M
空间力系的平衡方程见表3-5。 3.2解题要点
1、 空间一般力系的题型可分为空间力系的简化问题和平衡问题两大类。 物体在空间力系作用下的平衡问题的解题方法和步骤与平面问题基本相同。但求解空间问题时,要有清晰的空间概念,熟练掌握力在轴上的投影和力对轴之矩。
3、为了简化计算,在选取投影抽与力拒轴时,投影轴要与尽可能多的未知力或其所 在的平面相垂直,力矩轴应与尽可能多的未知力相交或平行.投影轴不一定要彼此垂直, 也不一定要与力矩轴相重合。在列平衡方程时,可用适当的力矩方程取代投影方程,即 可采用四矩式、五矩式或六矩式的平衡方程,只要所建立的平衡方程是彼此独立的,就能 解出全部未知量。
4.解空间力系平衡问题时,有时采用将该力系向三个相互垂直的坐标平面投影的方 法,将空间力系化为三个平面力系分别求解。采用此法时,必须注意各力在投影面上投 影的大小、方向及作用点的位置。
3.3范例分析
例3-1 图3-1(a)为直角三棱柱。其上作用力系::F 1=200 N,22F F '==100N ,试求该力系在各轴上的投影及对轴之矩。
图3-1
解
解题思路: F 1在轴上的投影可按直接投影法计算,对轴之矩可用力对轴之矩的解析式计算;22F F '与组成一个空间力偶矩矢M 1=F 2×0.2=20N ·m ,如图(b )所示,对轴之矩直接投影即可。
)N ( 28.7429
22004
.03.02.02.02
2
2
1
=?
=++=F F x
)N ( 56.1482942002941
=?==F F y
)N ( 41.11129
320029
31
-=?-=-=F F z
)m N ( 56.44041.1114.0)(?-=-?-=-=y z x zF yF M
)m N ( 28.341241.1112.053
)(1?=+?=+
-=M xF zF M z x y 154
)(M yF xF M x y z +-=
)m N ( 161628.44.056.1482.0?=+?-?=7
例3-2均质矩形板ABCD 重P=200 N ,作用在其对角线交点上,矩形板用球形铰链A 和蝶
形铰链B 固定在墙上,并用绳子CE 维持在水平位置如图3-2(a )所示,若α=30°,试求绳子的拉力以及铰链A,B 的反力。
图3-2
解
解题思路:取矩形板为研究对象,空间球形铰链A 的约束反力可用三个互相垂直的分力来表示。而蝶形铰链轴向的约束反力和垂直于轴向的约束力偶可以忽略,故约束反力的作用线在垂直于铰链轴的平面内。作用在板上的力组成一个空间任意力系,它有六个平衡方程,可求解六个未知力。
(1)取矩形板为研究对象,受力图如图(b )所示。为便于计算绳子拉力F 对x ,y 轴之矩,可将力F 分解成平行于z 轴的分力F z =F sin30°,与在板平面内的分力F xy =F cos30°。 (2)建立空间任意力系的平衡方程:
0)(=∑F m z , 0=Bx F (1) 0)(=∑F m y ,030sin 2
1
=??-?
BC F BC P (2) N F 200=
0)(=∑F m x ,030sin 2
1
=??+?-?CD F AB P AB F Bz (3)
0=Bz F
0=∑X ,060cos 30cos =???-+F F F Bx Ax (4)
N 6.86=Ax F
0=∑Y , 030cos 30cos =???-F F Ay (5)
N 150=Ay F
0=∑Z , 030sin =?+-+F P F F Bz Az (6)
N 100=Az F
[讨论]
空间力系的平衡方程建立次序可以随意,一般,首先建立的是不用解联立方程的力矩平衡方程。应尽可能使一个方程包含一个未知量,使未知量从方程中直接解出。最后还可以用非独立的平衡方程来校核所得约束力。如对DB 线用0=∑DB M 平衡方程来校核力F ,F Az
的值。
例3-3 图3-3(a )所示电杆OD 高7m ,D 处受水平力F =10kN 作用。O 处视为球铰支座,A 处以钢索AB 、AC 与地面相连,略去电杆自重。试求钢索拉力及支座反力。
解:
解题思路:电杆OD 受已知力F 、钢索的拉力F 1与F 2以及球铰支座O 处的反力F Ox 、F Oy 、F Oz 作用,计有5个未知量,可由空间一般力系平衡方程的基本形式求解。
OD 杆的受力如图(b )所示。对图示坐标系,列平衡方程
图3-3
0=∑X , 0s i n 45cos sin 45cos 21=+?-?O x F a F a F (1)
0=∑Y , 0c o s 45cos cos 45cos 21=+?+?+-O y F a F a F F (2)
0=∑Z , 045cos 45cos 21=?-?-F F F O z (3) 0)(=∑F m x , 0445sin 445sin 721=??-??-?F F F (4)
0)(=∑F m y 0345sin 345sin 21=??-??F F (5)
由图示几何关系知:53sin =
a ,5
4
cos =a 联立求解上述5个平衡方程,可得
kN 37.1221==F F ,F Ox =0,F Oy =–4 kN ,F Oz =17.5 kN
其中,负号表示约束反力的实际方向与假设的方向相反。
讨论 为了避免解联立方程组,如何合理选取力矩轴?理论依据是当力与轴相交或平行时,力对该轴之矩等于零。
首先,欲使力矩平衡方程中不出现F 1及F 2 ,可过F 1、F 2交点A 作x '及y '轴(图b ),此时力F 、F Oy 、F Oz 与y '轴共面,则这些力对y '轴之矩为零。故应以y '轴为矩轴。
0)(=∑'F m y ,05=?-Ox F
得
0=Ox F
同理,应以x '轴为矩轴列为矩平衡方程。由于已求出00=X ,在下面建立平衡方程时,可不再考虑。由
0)(=∑'F m x ,052=?-?O y F F
得
kN 45
2
-=-=F F Oy
其次以F 1、F 2的交线BC 为矩轴,即
0)(=∑F m BC ,047=?-?Oz F F
得
kN 5.174
7
==
F F Oz 最后,求F 1及F 2 。分别以OC 及OB 为力矩轴,列出力矩平衡方程
0)(=∑F m O C , 0)290cos(2
2
5sin 71=-???
+?-a F a F 0)(=∑F m O B , 0)290cos(2
2
5sin 72=-???
-?a F a F 可解出
α
ααcos 257)290cos(22
5
sin 721F F F F ?=
-=
=
kN 37.125
42
570==
应注意到,在上式的力矩计算中,应用了力矩关系定理。例如,当求)(1F m OC 时,是将力1F 对O 点之矩先表示为矩矢)(10F m ,再投影到OC 轴上。在本例中还可应用对CG 及BE 轴的力矩平衡方程,以求解F 1及F 2 。
综上述可知,由于合理地选取了力矩轴,并以力矩方程代替了投影方程,使得每个未知量都可由一个平衡方程单独解出来。既避免了解联立方程组,又可避免由于数值计算而产生误差的传播。
例3-4 在铅垂轴AB 上有一个水平圆盘。A 点为向心轴承,B 点为止推轴承。盘上C 点有力F 作用,在转轴上绕有一软绳,绳的一端悬挂有重物P ,如图3-4(a )所示。已知:P=100KN ,r 1=0.2m ,r 2=0.5m , a=1m ,α=30°,β=60°.试求平衡时力F 及轴承反力。 解
解题思路:先对z 轴取矩,列平衡方程,求出力F ,然后再求出A 及B 处的反力。
图3-4
(1)选取AB 物体为研究对象,A 点具有两个方向的轴向约束,B 点具有三个方 向的轴向约束,将传动轴上软绳分割。显然,分割后绳子的拉力为P 值。物体的受
力图见图(b),为方便地建立平衡方程,可将力F 分解成三个轴向的分力,按二次投影法,可得各分力大小为:F x =Fcos60°cos30°,F y =Fcos 260°,F y =Fsin60°。在作力F 的二次投影时,可
以作辅助图(c )来表示。
(2)按尽可能避免求解联立方程的原则建立方程:
∑=0)(F m z
, 060cos 21
=?-?r F r
P
得 F=80kN
∑=0)(F m
X
, 030cos 232=?-++-z y Ay F r aF aP aF
得 F A y =63﹒3kN
∑=0)(F m
Y
, 030sin 32=?++z x Ax F r aF aF
得 F Ax =–17﹒3kN
∑=0X , 0=++x Bx Ax
F F F
得: F Bx =–17﹒3kN
∑=0Y , 0=--+y By Ay
F P F F
得 F By =56﹒7kN
∑=0Z , 0=-z Bz
F F
得 F Bz =69﹒3kN
讨论:
对空间一般力系的平衡问题,可先将空间力沿三个坐标轴方向分解,然后再列平衡方程求解,较为方便。
例3-5边长为a 的等边三角形板ABC 用三根铅直杆1、2、3和三根与水平面各成30°角的斜杆4、5、6支撑在水平位置。在板的平面内作用有力偶M ,如图3-5(a)所示。板和各杆的自重不计,求各杆的内力。
图3-5
解:
解题思路:因支撑三角板的杆都是二力杆,故用截面法将各杆截开,取三角板为研究对象,受力如图(b )所示。它们构成空间一般力系,有六个未知量,可用空间一般力系平衡方程式求解。下面分别用三种方法求解。 [方法一]
用空间力系一般形式的平衡方程式求解。坐标系Dxyz 如图(b )所示。
0)(=∑F M z ,030cos 30cos 5=+???M a F (1) 得 a M
a M F 3430cos 2
5-=?
-
= 0=∑Y ,030cos 30cos 30cos 30cos 54=??-??F F (2) 得 a
M F F 3454-
== 0=∑X ,030sin 30cos 30sin 30cos 30cos 546=??-??-?F F F (3)
得 a
M
F F F 3430sin )(546-
=?+= 0)(=∑F M x ,030cos 30sin 30cos 42=???-?-a F a F
得 a
M
F F 3230sin 42=
?-= (4) 0)(=∑F M y ,
030sin 30sin 30sin 30sin 5423=??-???-?--a F a F a F a F (5) 得 a
M
F F F F 3230sin )30sin (5423=
?-?--= 0=∑Z ,
030sin 30sin 30sin 654321=?-?-?----F F F F F F (6)
得
a
M
F F F F F F 3230sin )(654321=
?++---= 上述求得的结果为各杆内力的大小。负号说明杆件受压。 在上面的分析中,我们应用了空间任意力系平衡方程的基本形式。与平面任意力系一样,空间任意力系平衡方程也有其他形式。我们可以根据需要选择投影轴或力矩轴,用力矩方程部分或全部地代替上述中的三个投影方程。 [方法二]
0)(=∑F M z , 030cos 30cos 5=+???M a F (1) 得 a
M
F 345-
= 0)(=∑F M FB , 030cos 30cos 6=+???M a F (2)
得 a
M
F 346-
= 0)(=∑F M EC , 030cos 30cos 4=+???M a F (3) 得 a
M
F 344-
= 0)(=∑F M AB , 030cos 30sin 30cos 63=???-?-a F a F (4) 得 a
M
F 323=
0)(=∑F M AC ,030cos 30sin 30cos 52=???-?-a F a F (5) 得 a
M
F F 3230sin 52=
?-= 0)(=∑F M BC , 030cos 30sin 30cos 41=???+?a F a F (6) 得 a
M
F F 3230sin 41=
?-= [方法三]
本题中,结构对称,荷载也对称,所以反力也应该对称,即 F 1=F 2=F 3 , F 4=F 5=F 6
因此,只有列出两个平衡方程,就可求出各杆内力。
讨论:
(1)由上述三种方法可知,合理选择投影轴和力矩轴对求解空间力系的平衡问题尤为重要。同时,不一定总要使三个力矩轴分别与投影轴重合;而且也不一定要采用三个投影式和三个力矩标准形式的平衡方程来求解。只要根据具体问题灵活选用,就能使求解简便。
(2)根据结构对称或荷载对称条件,也会给求解带来方便。 选不同力矩轴和投影轴建立平衡方程有一定的限制。当然,要判别任意写出的六个平衡方程是否独立是一个比较复杂的问题。但是,如果一个方程能解出一个未知量,这不仅避免了解联立方程,而且这个方程也一定是独立的。所以,在列平衡方程的其他形式时,要尽可能地使方程中只含有一个未知数。
例3-6 已知均质杆AB 和BC 分别重为P 和Q ,A 和C 用球形铰链支座连接在水平面上,另一端B 用球形铰链相连,靠在光滑的墙上,AC 与墙与地面的交线平行,?=∠90BAC ,AC=AO ,杆AB 与水平线交角为45°,如图3-6(a )所示。试求A 、C 的支座反力及墙上B 点所受的压力。
(a )
(b )
图3-6
解:
解题思路:本题为空间力系的物系平衡问题,可分别取整体及其中一部分为研究对象,列平衡方程求解。列平衡方程时应合理地选取力矩轴以避免解联立方程。
1、以整体为研究对象,受力图如图(a )所示,应注意两杆在B 点铰接后靠在墙上,故B 处为光华面约束。为方便计,取辅助坐标轴x '和z '。
∑='0)(F m x ,02
)(=?-?
+OB F OA
Q P B 得 2
Q
P F B +=
∑=0)(F m y ,02
=?
-?AC
Q AC Z C 得 2
Q Z C =
∑='
0)(F m
z , 0=?AC Y C
得 0=C Y
∑=0Y , 0=++B C A
F Y Y
得 2
Q
P Y A +-
= ∑=0Z , 0=--+Q P Z Z
C A
得 2
Q P Z A +
= ∑=0X , 0=+C A
X X
2、以杆AB 为研究对象,受力图见图(b )。
∑=0)(F m z
, 0=?OA X
A
得 0=A X
0=-=A C X X
讨论:对于空间力系的物系平衡问题,应特别注意研究对象及力矩轴、投影轴的选取,避免求解联立方程。
3.4课后练习
3.4.1是非题
1、一空间力系,若各力的作用线不是通过固定点A ,就是通过固定点B ,则其独立的平衡方程式只有5个。()
2、若空间力系各力的作用线都垂直某固定平面,则其独立的平衡方程最多有3个。()
3、一空间力系,对不共线的任意三点的主矩均等于零,则该力系平衡。()
4、物体的重心和形心虽然是两个不同的概念,但它们的位置却总是重合的。()
3.4.2填空题
1、通过A (3,0,0)、B (0,1,2)两点(长度单位为m ),由A 指向B 的力F 在z 轴上的投影为 ,对z 轴之矩为 。
2、图3-7中力KN F 3=,力F 对x 轴之矩为 ,对y 轴之矩为 ,对z 轴之矩为 。
图3-7 图3-8
3、已知力F和长方体的边长a、b、c及角?、θ,如图3-8所示,力F对AB轴之矩的大小为。
4、边长为a的立方体,受三个力作用,如图3-9所示。设F
=
=
F
F=
F
,则此力系
1
2
3
的简化结果为。
图3-9
3.4.3选择题
1、空间力矩是()。
(a)标量;(b)定点矢量;(c)滑动矢量;(d)自由矢量。
2、空间力偶矩是()。
(a)标量;(b)定点矢量;(c)滑动矢量;(d)自由矢量。
3、正立方体的顶角上作用着6个大小相等
的力,如图3-10所示。此力系向任一点简化的结果是()。
(a)主矢等于零,主矩不等于零(b)主矢不等于零,主矩也不等于零
(c)主矢不等于零,主矩等于零(d)主矢等于零,主矩也等于零
图3-10
4、正立方体的前侧面沿AB 方向作用一力F ,如图3-11所示。该力()。 (a )对x 、y 、z 轴之矩全相等 (b )对三轴之矩全不相等 (c )对x 、y 轴之矩相等 (d )对y 、z 轴之矩相等
图3-11
5、在一个正方体上沿棱边作用6个力,各力的大小都等于F ,如图3-12所示。此力系的最终简化结果为()。
(a ) 合力 (b )平衡 (c) 合力偶 (d) 力螺旋
图3-12
3.4.4计算题
3-1正方体的边长a=20 cm ,力F 沿对顶线AB 作用,如图3-13所示,其大小以AB 线的长度表示,每1cm 代表10N 。试求:
(1) 力F 在各坐标轴上的投影,(2)力F 对各坐标轴之矩,(3)力F 对O 点的矩矢。 答案:(1)X =–200N ,Y = Z =200N
(2)0)(=F m x ,m N F m y ?-=40)( , m N F m z ?=40)( (3)j i F m 40400)(+-=
3-2均质等腰三角形薄板ABC ,重为P ,用球铰A 及不计自重的细杆BE 、 BD 及CD 维持于水平位置上,如图3-14所示。没EA=AB=BC=a ,试求A 处的反力及各杆的内力。
答案:3P F Ax -= ,32P F Ay -= ,3
P F Az = P F BE 322=
,P F BD 3
3-= ,P F CD 32
=
图3-13 图3-14
3-3正方形板ABCD 由六根直杆支撑,各杆尺寸如图3-15所示。在板上点A 处沿AD 边
作用水平力F ,板和各杆的重量都不计。求各杆的内力。
答案:F F =1,F F 22-=,F F -=3,F F 24=,F F 25=,F F -=6
图3-15
3-4起重机绞车如图3-16所示。已知α=20°,r=100mm ,R=200mm ,其它尺寸(单位:mm )如图所示,Q=10kN ,试求重物匀速上升时支座A 、B 的反力及齿轮所受的力P 的大小。 答案:F Ay =–1﹒67kN ,F Az =7﹒27kN ;
F By =–3﹒33kN , F Bz =4﹒55kN ; P=5﹒32kN 。
图3-16
3-5 图3-17所示装置中,竖杆AB 用两绳拉住,A 处为球铰支座。已知P=20 kN ;不计杆重,试求两绳的拉力和铰A 的反力。
答案:F H =F G =28.3kN ,X A =0 ,Y A =20kN ,Z A =69.2kN
图3-17
3-6 均质长方形板重260N ,用球铰A 、蝶形铰链B 和不计重量的杆CE 支持,处于水平位置,如图3-18所示。已知AB=1.2m ,AD=0.5m ,AE=0.65m ,C 、E 为球铰。试求A 、B 、C 处的约束反力。
答案:N X A 100-=,N Y A 240-=,N Z A 130=,0=B X ,0=B Z ,N F CE 5130=
图3-18
3-7 图3-19所示折杆ABCD 的A 端为固定端约束,荷载及尺寸如图所示。试求A 端的约束反力。
答案:0=A X ,N Y A 200-=,kN Z A 1=,m kN M x ?=11,0=y M ,
m kN M z ?-=2
图3-19
课时授课计戈I 」 第三章空间力系与重心 掌握力在空间直角坐标系上的投影的计算 掌握力对轴的矩的计算 掌握空间力系的平衡条件 掌握重心的概念 空间力系的平衡条件 力对轴的矩的计算 第三章 空间力系与重心 第一节力在空间直角坐标系上的投影 第二节力对轴的矩 第三节 空间力系的平衡条件 第四节物体的重心 课本 教学方法 课堂教学 授课日期 2011.10.22 1044-3 目 的 要 求
教学过程: 复习:1、复习约束与约束反力概念。 2、复习物体受力图的绘制。 课: 第三章 空间力系与重心 第一节力在空间直角坐标系上的投影 1. 力在直角坐标轴上的投影和力沿直角坐标轴的分解 若已知力F 与正交坐标系Oxyz 三轴间的夹角分别为a 、p 、丫, 如图4-1 所示,则力在三个轴上的投影等于力F 的大小乘以与各轴夹角的余弦, 即 X=F cos a Y=W cos p Z=F cos 丫 当力F 与坐标轴Ox Oy 间的夹角不易确定时,可把力 F 先投影到坐 标平面Oxy 上,得到力F 砂,然后再把这个力投影到x 、y 轴上。在图4-2 中, 已知角丫和卩,则力F 在三个坐标轴上的投影分别为 (4-1) O 图4一 1 書
Z jr 乙Z
X=F sin 丫 COS 0 Y=F sin 丫 sin W Z=F cos 丫 若以人、人、人表示力F 沿直角坐标轴X 、y 、z 的正交分量,以i 、 j 、k 分别表示沿X 、y 、z 坐标轴方向的单位矢量,如图4-3所示,则 图4-2 戸=人+尸$+巧=为+Y +Zk 由此,力F 在坐标轴上的投影和力沿坐标轴的正交分矢 量间的关系可表示为 人=X ,人=Y ,人=zk (4-4) 如果己知力F 在正交轴系Oxyz 的三个投影,则力F 的大小和方向余弦为 F =J 护+尸+0 £ cos( F , i)= F (4-5) 例:图4-4所示的圆柱斜齿轮,其上受啮合力 E 的作用。已知斜齿 轮的齿倾角(螺旋角)P 和压力角a ,试求力E 沿x 、y 和z 轴的分力。 (4-2) (4-3)
3、空间一般力系 3.1内容提要 3.1.1力在轴上的投影 力在轴上的投影祥见表3-1 表3-1 力在轴上的投影 3.1.2力对点的矩和力对轴的矩 有关力矩的概念祥见表3-2 3.1.3空间一般力系的简化 1、空间任意力系向任一点简化 空间一般力系向简化中心简化,可得主矢和主矩,其结果见表3-3。 2、空间一般力系简化的最后结果
空间一般力系简化的最后结果见表3-4 3.1.4空间一般力系的平衡 空间一般力系是力系的最一般形式,其平衡的充要条件是,力系的主矢和对任一点O 的主矩都等于零,即 0='R F ,00=M 空间力系的平衡方程见表3-5。 3.2解题要点 1、 空间一般力系的题型可分为空间力系的简化问题和平衡问题两大类。 物体在空间力系作用下的平衡问题的解题方法和步骤与平面问题基本相同。但求解空间问题时,要有清晰的空间概念,熟练掌握力在轴上的投影和力对轴之矩。 3、为了简化计算,在选取投影抽与力拒轴时,投影轴要与尽可能多的未知力或其所 在的平面相垂直,力矩轴应与尽可能多的未知力相交或平行.投影轴不一定要彼此垂直, 也不一定要与力矩轴相重合。在列平衡方程时,可用适当的力矩方程取代投影方程,即 可采用四矩式、五矩式或六矩式的平衡方程,只要所建立的平衡方程是彼此独立的,就能 解出全部未知量。 4.解空间力系平衡问题时,有时采用将该力系向三个相互垂直的坐标平面投影的方 法,将空间力系化为三个平面力系分别求解。采用此法时,必须注意各力在投影面上投 影的大小、方向及作用点的位置。
3.3范例分析 例3-1 图3-1(a)为直角三棱柱。其上作用力系::F 1=200 N,22F F '==100N ,试求该力系在各轴上的投影及对轴之矩。 图3-1 解 解题思路: F 1在轴上的投影可按直接投影法计算,对轴之矩可用力对轴之矩的解析式计算;22F F '与组成一个空间力偶矩矢M 1=F 2×0.2=20N ·m ,如图(b )所示,对轴之矩直接投影即可。 )N ( 28.7429 22004 .03.02.02.02 2 2 1 =? =++=F F x )N ( 56.1482942002941 =? ==F F y )N ( 41.11129 320029 31 -=?-=-=F F z )m N ( 56.44041.1114.0)(?-=-?-=-=y z x zF yF M )m N ( 28.341241.1112.053 )(1?=+?=+ -=M xF zF M z x y 154 )(M yF xF M x y z +-= )m N ( 161628.44.056.1482.0?=+?-?=7 例3-2均质矩形板ABCD 重P=200 N ,作用在其对角线交点上,矩形板用球形铰链A 和蝶 形铰链B 固定在墙上,并用绳子CE 维持在水平位置如图3-2(a )所示,若α=30°,试求绳子的拉力以及铰链A,B 的反力。
3、空间一般力系 内容提要 力在轴上的投影 力在轴上的投影祥见表3-1 表3-1 力在轴上的投影 力对点的矩和力对轴的矩 有关力矩的概念祥见表3-2 空间一般力系的简化 1、空间任意力系向任一点简化 空间一般力系向简化中心简化,可得主矢和主矩,其结果见表3-3。 2、空间一般力系简化的最后结果
空间一般力系简化的最后结果见表3-4 空间一般力系的平衡 空间一般力系是力系的最一般形式,其平衡的充要条件是,力系的主矢和对任一点O 的主矩都等于零,即 0='R F ,00=M 空间力系的平衡方程见表3-5。 解题要点 1、 空间一般力系的题型可分为空间力系的简化问题和平衡问题两大类。 物体在空间力系作用下的平衡问题的解题方法和步骤与平面问题基本相同。但求解空间问题时,要有清晰的空间概念,熟练掌握力在轴上的投影和力对轴之矩。 3、为了简化计算,在选取投影抽与力拒轴时,投影轴要与尽可能多的未知力或其所 在的平面相垂直,力矩轴应与尽可能多的未知力相交或平行.投影轴不一定要彼此垂直, 也不一定要与力矩轴相重合。在列平衡方程时,可用适当的力矩方程取代投影方程,即 可采用四矩式、五矩式或六矩式的平衡方程,只要所建立的平衡方程是彼此独立的,就能 解出全部未知量。 4.解空间力系平衡问题时,有时采用将该力系向三个相互垂直的坐标平面投影的方 法,将空间力系化为三个平面力系分别求解。采用此法时,必须注意各力在投影面上投 影的大小、方向及作用点的位置。
范例分析 例3-1 图3-1(a)为直角三棱柱。其上作用力系::F 1=200 N,22F F '==100N ,试求该力系在各轴上的投影及对轴之矩。 图3-1 解 解题思路: F 1在轴上的投影可按直接投影法计算,对轴之矩可用力对轴之矩的解析式计算;22F F '与组成一个空间力偶矩矢M 1=F 2×=20N ·m ,如图(b )所示,对轴之矩直接投影即可。 )N ( 28.7429 22004 .03.02.02.02 2 2 1 =? =++=F F x )N ( 56.1482942002941 =? ==F F y )N ( 41.11129 320029 31 -=?-=-=F F z )m N ( 56.44041.1114.0)(?-=-?-=-=y z x zF yF M )m N ( 28.341241.1112.053 )(1?=+?=+ -=M xF zF M z x y 154 )(M yF xF M x y z +-= )m N ( 161628.44.056.1482.0?=+?-?=7 例3-2均质矩形板ABCD 重P=200 N ,作用在其对角线交点上,矩形板用球形铰链A 和蝶形 铰链B 固定在墙上,并用绳子CE 维持在水平位置如图3-2(a )所示,若α=30°,试求绳子的拉力以及铰链A,B 的反力。
第三章 空间力系 3-1 在正方体的顶角A 和B 处,分别作用力1F 和2F ,如图所示。求此两力在x ,y ,z 轴上的投影和对x ,y ,z 轴的矩。试将图中的力1F 和2F 向点O 简化,并用解析式计算其大小和方向。 3-2 图示正方体上A 点作用一个力F ,沿棱方向,问: (1)能否在B 点加一个不为零的力,使力系向A 点简化的主矩为零? (2)能否在B 点加一个不为零的力,使力系向B 点简化的主矩为零? (3)能否在B ,C 两处各加一个不为零的力,使力系平衡? (4)能否在B 处加一个力螺旋,使力系平衡? (5)能否在B ,C 两处各加一个力偶,使力系平衡? (6)能否在B 处加一个力,在C 处加一个力偶,使力系平衡?
3-3 图示为一边长为a的正方体,已知某力系向B点简化得到一合力,向C?点简化也得一合力。问: (1)力系向A点和'A点简化所得主矩是否相等? (2)力系向A点和'O点简化所得主矩是否相等? 3-4 在上题图中,已知空间力系向'B点简化得一主矢(其大小为F)及一主矩(大小、方向均未知),又已知该力系向A点简化为一合力,合力方向指向O点试: (1)用矢量的解析表达式给出力系向'B点简化的主矩; (2)用矢量的解析表达式给出力系向C点简化的主矢和主矩。
3-5 (1)空间力系中各力的作用线平行于某一固定平面;(2)空间力系中各力的作用线分别汇交于两个固定点。试分析这两种力系最多能有几个独立的平衡方程。 3-6 传动轴用两个止推轴承支持,每个轴承有三个未知力,共6个未知量。而空间任意力系的平衡方程恰好有6个,是否为静定问题? 3-7 空间任意力系总可以由两个力来平衡,为什么? 3-8 某一空间力系对不共线的三点主矩都为零,问此力系是否一定平衡? 3-9 空间任意力系向两个不同的点简化,试问下述情况是否可能? (1)主矢相等,主矩相等。 (2)主矢不相等,主矩相等。 (3)主矢相等,主矩不相等。 (4)主矢、主矩都不相等。 3-10 一均质等截面直杆的重心在哪里?若把它弯成半圆形,重心位置是否改变?
第六章空间力系重心习题概念题: 4.1 4.2 4.3 4.4 4.5 4.6
4.7 4.8 4.9 4.10 4.11 4.12 计算题:
4.2 4.3 4.4
4.5 4.6 4.7
4.8 课后习题 6-1已知力P大小和方向如图所示,求里P对z轴的矩。(题6-1图a中的P位于其过轮缘上作用点的切平面内,且与轮平面成α=60度角;图b中的力P位于轮平面内与轮的法线成β=60度角)。 6-2作用于手柄端的力F=600KN,试求计算力在x,y,z轴上的投影及对x,y,z 轴之矩。 6-3图示三脚架的三只角AD,BD,CD各与水平面成60度角,且AB=BC=AC,绳索绕过D处的滑轮由卷扬机E牵引将重物G吊起,卷扬机位于∠ACB的等分线上,且DE与水平线成60度角。当G=30KN时 被等速地提升时,求各角所受的力。 6-4重物Q=10KN,由撑杆AD及链条BD和CD所支持。杆的A端以铰链固定,又A,B和C三点在同一铅垂墙上。尺寸如图所示,求撑杆AD和链条BD,CD 所受的力(注:OD垂直于墙面,OD=20cm)。 6-5固结在AB轴上的三个圆轮,半径各为r1,r2,r3;水平和铅垂作用力大大小F1=F1’,F2=F2’为已知,求平衡时F3和F3’两力的大小。
6-6平行力系由5个力组成,各力方向如图所示。已知:P1=150N,P2=100N,P3=200N,P4=150N,P5=100N。图中坐标的单位为cm。求平行力系的合力。 6-7有一齿轮传动轴如图所示,大齿轮的节圆直径D=100mm,小齿轮的节圆直径d=50mm。如两齿轮都是直齿,压力角均为α=20度,已知作用在大齿轮上的圆周力P1=1950N,试求转动轴作匀速转动时, 小齿轮所受的圆周力P2的大小及两轴承的反力。
第六章 空间力系及重心 一、内容提要 1、空间力对点之矩和对轴之矩 1)空间力对点之矩是矢量,且F r F m o ?=)( 2)空间力对轴之矩是一代数量,其正负号按右手螺旋规则确定,大小有两种计算方法: (a )先将力投影到垂直于轴的平面上,然后按平面上力对点之矩计算,即 )()(yz o Z F m F m = (b)若已知力在坐标轴上的投影F x 、F y 和F Z 及该力的作用点的坐标x 、y 、z ,则力对各坐标轴的矩可表示为 =)(F m x yF z -zF y =)(F m y zF x -xF z =)(F m z xF y -yF x 3) 力对点之矩和力对轴之矩的关系(力矩关系定理): x o x F m F m )]([)(= y o y F m F m )]([)(= z o z F m F m )]([)(= 4)特殊情况 当力与轴平行或相交(即力与轴共面)时,力对轴之矩等于零。 2、空间任意力系的简化、合成 1)空间任意力系的简化、力系的主矢与主矩 主矢R /=∑F i , 主矢的大小和方向与简化中心的位置无关。 主矩M o =∑m o (F), 主矩的大小和转向一般与简化中心的位置有关。 2)空间任意力系的合成结果
空间任意力系的平衡方程的基本形式为 0=∑x F ,0=∑y F ,0=∑Z F 0)(=∑F m x ,0)(=∑F m y ,0)(=∑F m Z 2)几种特殊力系的平衡方程 (a )空间汇交力系的平衡方程的基本形式为 0=∑x F ,0=∑y F ,0=∑Z F (b )空间平行力系,若力系中各力与轴平行,则0≡∑x F ,0≡∑y F , 0)(≡∑F m Z ,其平衡方程的基本形式为: 0=∑Z F ,0)(=∑F m x ,0)(=∑F m y (c )空间力偶系的平衡方程的基本形式为 0)(=∑F m x ,0)(=∑F m y ,0)(=∑F m Z 4、本章根据合力矩定理推导了重心坐标公式。对于简单形状的均质物体,其重心可用积分形式的重心坐标公式确定,或直接查表。至于复杂形状的均质物体的重心,可采用分割法或负面积(负体积)法求得。
第5章空间力系与重心 教学提示:本章介绍空间力系和重心、包括空间力的投影与分解、力对轴之 矩、空间力系的平衡、物体的重心.是静力学重要内容之一。 教学要求:本章是学生掌握以下内容,并学会实际应用。 (1) 空间汇交力系的概念 (2) 力对轴之矩和力对点之矩概念和计算 (3) 空间力偶系 (4) 空间力系的简化 (5) 空间力系的平衡条件和平衡方程 (6) 物体的重心 5.1力在直角坐标轴上的投影 已知力F与x轴如图5.1(a)所示,过力F的两端点A、B分别作垂直于x轴的平面M及N ,与x轴交于a、b,则线段ab冠以正号或负号称为力F在x轴上的投影,即 F x=±ab 符号规定:若从a到b的方向与x轴的正向一致取正号,反之取负号。 已知力F与平面Q,如图5.1(b)所示。过力的两端点A、B分别作平面Q的 '称为力F在平面Q上的投影。应注意的是力在垂直线AA′、BB′,则矢量B A' 平面上的投影是矢量,而力在轴上的投影是代数量。 (a) (b) 图5.1 图5.2
现在讨论力F 在空间直角坐标系Oxy 中的情况。如图5.2(a)所示,过力F 的端点A 、B 分别作x 、y 、z 三轴的垂直平面,则由力在轴上的投影的定义知,OA 、OB 、O C 就是力F 在x 、y 、z 轴上的投影。设力F 与x 、y 、z 所夹的角分别是α、β、γ,则力F 在空间直角坐标轴上的投影为: ??? ??±=±=±=γβα c o s c o s c o s F F F F F F z y x (5-1) 用这种方法计算力在轴上的投影的方法称为直接投影法。 一般情况下,不易全部找到力与三个轴的夹角,设已知力F 与z 轴夹角为γ ,可先将力投影到坐标平面Oxy 上,然后再投影到坐标轴x 、y 上,如图5.2(b )所示。设力F 在Oxy 平面上的投影为F xy 与x 轴间的夹角为θ,则 ??? ??±=±=±=γθγθγc o s s i n s i n c o s s i n F F F F F F z y x (5-2) 用这种方法计算力在轴上的投影称为二次投影法。 若已知力F 在坐标轴上的投影,则该力的大小及方向余弦为 ? ? ? ??===++=F Z F Y F X Z Y X F γβαcos ,cos ,cos 2 22 (5-3) 如果把一个力沿空间直角坐标轴分解,则沿三个坐标轴分力的大小等于力在这三个坐标轴上投影的绝对值。 例5.1 如图5.3所示,已知力F 1=2kN ,F 2=1kN ,F 3=3kN ,试分别计算三力在x 、y 、z 轴上的投影。 图5.3 解:
第六章空间力系和重心 教学目标 1 能熟练地计算力在空间直角坐标轴上的投影和力对轴之矩。 2 了解空间力系向一点简化的方法和结果。 3 能应用平衡条件求解空间汇交力系、空间任意力系、空间平行力系的平衡问题。 4 能正确地画出各种常见空间约束的约束力。 5 对重心应有清晰的概念,能熟练地应用组合法求物体的重心。 本章重点 1 力在空间直角坐标轴上的投影和力对轴之矩。 2 空间汇交力系、空间任意力系、空间平行力系平衡方程的应用。 3 各种常见空间约束的约束力。 4 重心的坐标公式。 本章难点 空间矢量的运算,空间结构的几何关系和立体图。 教学过程(下页)
一、空间力系的简化 1.空间力系向一点简化 刚体上作用空间力系),,(21n F F F ,将力系中各力向任选的简化中心O 简化。 主矢:∑∑='=C i F F F ,与O 点选择无关。 (6-1) 主矩:∑∑∑?===)()(00i i i i F r F M M M ,与O 点的选择有关。 (6-2) 主矢F 和主矩0M 的解析表达式 222)()()(∑∑∑++=iz iy ix F F F F (6-3) F F x F ix ∑= ),cos( ,F F y F iy ∑= ),cos( ,F F z F iz ∑= ),cos( 2 220))(())(())((i z i y i x F M F M F M M ∑∑∑++= (6-4) 0) (),cos(M F M x M i x ∑= ,0 0) (),cos(M F M y M i y ∑= ,0 0) (),cos(M F M z M i z ∑= 结论:空间力系向任一点简化,一般可得到一力和一力偶,该力通过简化中心,其大小和方向等于力系的主矢,该力偶的力偶矩矢等于力系对简化中心的主矩。 2.空间力系简化的最后结果 (1)空间力系平衡 0=F ,00=M ,此空间力系为平衡力系。 (2)空间力系简化为一合力偶 0=F ,00≠M ,此空间力系简化为一合力偶,合力偶矩矢等于力系主矩0M 与简 化中心的位置无关。