光电鼠标设计方案和鼠标芯片介绍
2009-11-26 15:58:58 作者:jcmicon622来源:浏览次数:1218 文字大小:【大】【中】【小】
中国电脑教育报
相对于传统的机械式鼠标,光电鼠标具有定位准确、移动流畅且不易脏污等优点。并且,随着光电鼠标价格的不断下跌,取代机械式鼠标而成为市场主流的趋势已不可阻挡。
今天,笔者就以方正品牌机配备的光电鼠标为例,带领大家一起去见识一下光电鼠标的内部“风光”。
光电鼠标的工作原理
光电鼠标与机械式鼠标最大的不同之处在于其定位方式不同。
光电鼠标的工作原理是:在光电鼠标内部有一个发光二极管,通过该发光二极管发出的光线,照亮光电鼠标底部表面(这就是为什么鼠标底部总会发光的原因)。然后将光电鼠标底部表面反射回的一部分光线,经过一组光学透镜,传输到一个光感应器件(微成像器)内成像。这样,当光电鼠标移动时,其移动轨迹便会被记录为一组高速拍摄的连贯图像。最后利用光电鼠标内部的一块专用图像分析芯片(DSP,即数字微处理器)对移动轨迹上摄取的一系列图像进行分析处理,通过对这些图像上特征点位置的变化进行分析,来判断鼠标的移动方向和移动距离,从而完成光标的定位。
光电鼠标通常由以下部分组成:光学感应器、光学透镜、发光二极管、接口微处理器、轻触式按键、滚轮、连线、PS/2或USB接口、外壳等。下面分别进行介绍:
光学感应器
光学感应器是光电鼠标的核心,目前能够生产光学感应器的厂家只有安捷伦、微软和罗技三家公司。其中,安捷伦公司的光学感应器使用十分广泛,除了微软的全部和罗技的部分光电鼠标之外,其他的光电鼠标基本上都采用了安捷伦公司的光学感应器。
图1 光电鼠标内部的光学感应器
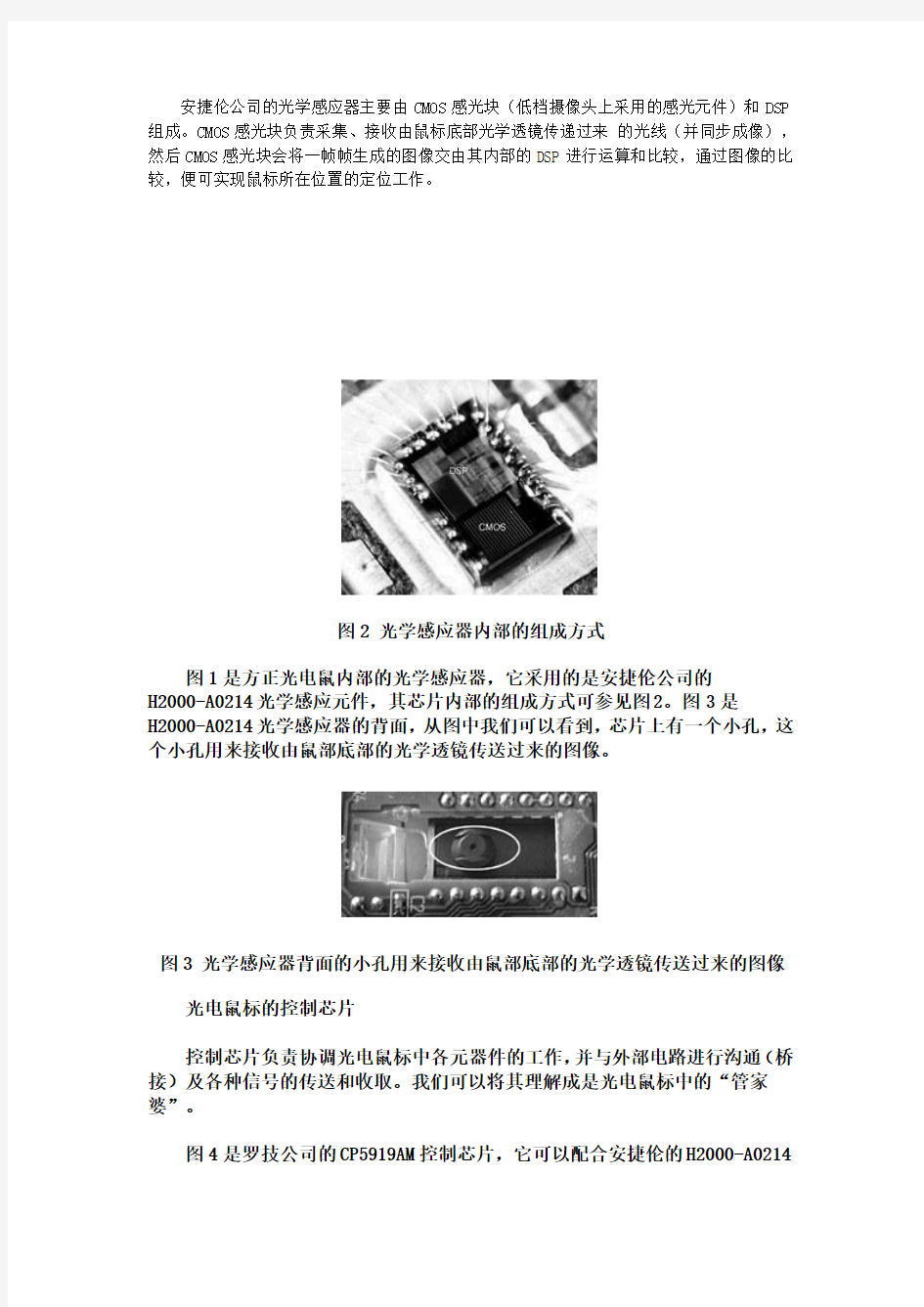
安捷伦公司的光学感应器主要由CMOS感光块(低档摄像头上采用的感光元件)和DSP 组成。CMOS感光块负责采集、接收由鼠标底部光学透镜传递过来的光线(并同步成像),然后CMOS感光块会将一帧帧生成的图像交由其内部的DSP进行运算和比较,通过图像的比较,便可实现鼠标所在位置的定位工作。
图2 光学感应器内部的组成方式
图1是方正光电鼠内部的光学感应器,它采用的是安捷伦公司的
H2000-A0214光学感应元件,其芯片内部的组成方式可参见图2。图3是
H2000-A0214光学感应器的背面,从图中我们可以看到,芯片上有一个小孔,这个小孔用来接收由鼠部底部的光学透镜传送过来的图像。
图3 光学感应器背面的小孔用来接收由鼠部底部的光学透镜传送过来的图像
光电鼠标的控制芯片
控制芯片负责协调光电鼠标中各元器件的工作,并与外部电路进行沟通(桥接)及各种信号的传送和收取。我们可以将其理解成是光电鼠标中的“管家婆”。
图4是罗技公司的CP5919AM控制芯片,它可以配合安捷伦的H2000-A0214
光学感应元件,实现与主板USB接口之间的桥接。当然,它也具备了一块控制芯片所应该具备的控制、传输、协调等功能。
这里有一个非常重要的概念大家应该知道,就是dpi对鼠标定位的影响。dpi是它用来衡量鼠标每移动一英寸所能检测出的点数,dpi越小,用来定位的点数就越少,定位精度就低;dpi越大,用来定位点数就多,定位精度就高。
图4 罗技公司的CP5919AM控制芯片
通常情况下,传统机械式鼠标的扫描精度都在200dpi以下,而光电鼠标则能达到400甚至800dpi,这就是为什么光电鼠标在定位精度上能够轻松超过机械式鼠标的主要原因。
9890501 at 2008-7-21 10:45:56
光学透镜组件
光学透镜组件被放在光电鼠标的底部位置,从图5中可以清楚地看到,光学透镜组件由一个棱光镜和一个圆形透镜组成。
图5 光学透镜组件由一个棱光镜和一个透镜组成
其中,棱光镜负责将发光二极管发出的光线传送至鼠标的底部,并予以照亮。
圆形透镜则相当于一台摄像机的镜头,这个镜头负责将已经被照亮的鼠标底部图像传送至光学感应器底部的小孔中。通过观看光电鼠标的背面外壳,我们可以看出圆形透镜很像一个摄像头(如图6)!
图6 光电鼠标的背面外上的壳圆形透镜很像一个摄
像头
通过试验,笔者得出结论:不管是阻断棱光镜还是圆形透镜的光路,均会立即导致光电鼠标“失明”。其结果就是光电鼠标无法进行定位,由此可见光学透镜组件的重要性。
发光二极管
光学感应器要对缺少光线的鼠标底部进行连续的“摄像”,自然少不了“摄影灯”的支援。否则,从鼠标底部摄到的图像将是一片黑暗,黑暗的图像无法进行比较,当然更无法进行光学定位了。
图7 光电鼠标内部的发光二极管
通常,光电鼠标采用的发光二极管(如图7)是红色的(也有部分是蓝色的),且是高亮的(为了获得足够的光照度)。发光二极管发出的红色光线,一部分通过鼠标底部的光学透镜(即其中的棱镜)来照亮鼠标底部;另一部分则直接传到了光学感应器的正面。
用一句话概括来说,发光二极管的作用就是产生光电鼠标工作时所需要的光源。
9890501 at 2008-7-21 10:46:36
轻触式按键
没有按键的鼠标是不敢想象的,因而再普通的光电鼠标上至少也会有两个轻触式按键。方正光电鼠标的PCB上共焊有三个轻触式按键(图8)。除了左键、右键之外,中键被赋给了翻页滚轮。高级的鼠标通常带有X、Y两个翻页滚轮,而大多数光电鼠标还是像这个方正光电鼠标一样,仅带了一个翻页滚轮。翻页滚轮上、下滚动时,会使正在观看的“文档”或“网页”上下滚动。而当滚轮按下时,则会使PCB上的“中键”产生作用。注意:“中键”产生的动作,可由用户根据自己的需要进行定义。
图8 方正光电鼠标的PCB上共焊有三个轻触式按键
当我们卸下翻页滚轮之后,可以看到滚轮位置上,“藏”有一对光电“发射/接收”装置(如图9)。“滚轮”上带有栅格,由于栅格能够间隔的“阻断”这对光电“发射/接收”装置的光路,这样便能产生翻页脉冲信号,此脉冲信号经过控制芯片传送给Windows操作系统,便可以产生翻页动作了。
图9 光电“发射/接收”装置
除了以上这些,光电鼠标还包括些什么呢?它还包括连接线、PS/2或USB接口、外壳等。由于这几个部分与机械式鼠标没有多大分别,因此,这里就不再说明了!
安捷伦和安华高
安捷伦科技(NYSE:A)是由美国惠普公司战略重组分立而成的,其业务重点包括通
信、电子及化学分析与生命科学。1999 年11月18日, 安捷伦科技以代码“A”在纽约股票交易所挂牌上市。虽然在除了光学传感之外的领域里,安捷伦也取得了巨大的成就。但是对于广大玩家来说,大家提起安捷伦(AGILENT),还是首先想起它作为世界上最著名的鼠标用光学/激光感应器材的生产厂家。
的确,在上世纪90年代和本世纪初的这段时间里,安捷伦几乎是高档光电/激光鼠标芯片的代名词,作为安捷伦历史悠久的合作伙伴,在上世纪末,在MS和安捷伦勾搭上之前,LOGITECH几乎是垄断了高端外设的市场。而在山的那一边,那条叫RAZER 的小蛇,当时连牙还没有长全呢~
在2005年8月,投资公司Kohlberg Kravis Roberts Co.会同风险投资商Silver Lake Partners,以26.6亿美的价格并购了安捷伦科技。并购后,新成立了公司AVAGO,也就是现在大家所说的安华高,并且号称全球最大的非上市独立半导体公司。
Avago Technologies 拥有5,500多种系列产品,主要应用于无线和有线通信、工业、汽车、消费电子及存储和计算机等广阔的应用领域和终端市场。它在光电耦合器、红外线收发器、光通信器件、打印机ASIC、光学鼠标传感器和运动控制编码器等领域一直保持市场前 3名的领导地位。通过并购,安华高遗传了安捷伦全部的研发能力和市场网络,并且将其在光电鼠标处理芯片上的技术优势地位继续延续。
在下面的文章中,在介绍产品的时候,我决定仍然使用安捷伦这个名字,也当作是对它的一个怀念和敬意吧
先补充一点小知识,有关激光引擎和光学引擎的
激光引擎和光学引擎的区别~~~
从原理上来讲是类似的,但是由于激光是相干光~ 所以具有比LED光源更好的特性~ 安捷伦自己的描述是这样的
A, LED光学引擎的原理示意图
下载 (56.46 KB)
2008-9-8 14:06
B,激光引擎的原理示意图
下载 (47.8 KB)
2008-9-8 14:06
C, 激光比LED引擎的优越性
下载 (43.4 KB)
2008-9-8 14:06
D, 激光可支持更多的表面
下载 (41.77 KB)
2008-9-8 14:06
激光引擎可以支持的表面包括:纸,木材,包装纸,粗斜纹棉布,棉布,榻榻米(!),地毯(!),金属,瓷砖,塑料,福米卡塑料(!?),网格(!!!)
LED引擎可以支持的表面包括:纸,木材,包装纸,粗斜纹棉布,棉布,纯黑表面
安捷伦到目前为止,所出产的鼠标应用方案如下:
LED光学引擎系列
型号系
列描述
ADNS-2030 无线系
列低功率光学传感器,为无线应用优化
ADNS-2051 有线系
列中频光学传感器,为有线/无线应用
ADNS-2610 有线(小型封
装)入门级,小型封装光学传感器,为普通鼠标应用
ADNS-2620 有线(小型封
装)入门级,小型封装光学传感器,性能提高
ADNS-3040 无线系
列超低功率光学传感器,为无线应用优化
ADNS-3060 有线系
列高性能光学传感器
ADNS-3080 游戏系
列高分辨率光学传感器,为游戏应用
ADNS-3530 MINI系
列 MINI系列低功率,芯片-基板-LED整合设计光学传感器,为无线应用设计ADNS-3550 MINI系
列 MINI系列低功率,芯片-基板-LED整合设计光学传感器,为无线应用设计ADNS-5000 有线系
列基于LED的导航传感器ADNS-5020-EN 有线(小型封装)小型封装光学传感器,较入门级性能有所提高
ADNS-5030 无线(小型封装)低功率,小型封装光学传感器,为无线应用设计
ADNS-5050 有线系
列性能提升的基于LED的导航
传感器
LaserStream 激光引擎系列
型号系
列描述
ADNS-6000 有线系
列高性能激光鼠标传感器ADNS-6010 游戏系
列高分辨率激光鼠标传感器,为游戏设计
ADNS-6090 专业游戏系列增强型游戏级激光传感器
ADNS-6530 MINI系
列 MINI系列低功率,芯片-基板-LED一体化设计激光传感器,为无线应用设计ADNS-7010 休闲游戏系列休闲型游戏级激光传感器
ADNS-7050 无线系
列低功率激光传感器ADNS-7530 无线系
列整合型,入门级,小型封装激光传感器
ADNS-7550 有线系
列整合型,入门级,小型封装激光传感器
目前,以LOGI为主的厂家,包括MS等,以及国产的双飞燕等,均广泛使用安捷伦的芯片
各款芯片的主要技术参数
A, 安捷伦光电引擎系列
下载 (359.02 KB) 2008-9-8 14:19
B, 安捷伦激光引擎系列
下载 (272.16 KB)
2008-9-8 14:19
单位注释:
1,IPS: INCH PER SECOND=英寸/秒, 1英寸=2.54厘米
2,CPI: COUNT PER INCH,类似于DPI,表示每英寸采集多少个点的数据
3, FPS: FRAME PER SECOND,每秒扫描多少帧图像4,G: GRAVITY,加速度单位, 1G=9.8米/秒
上面的芯片参数来源于AVAGO官网
鼠标的组成及工作原理-标准化文件发布号:(9556-EUATWK-MWUB-WUNN-INNUL-DDQTY-KII
鼠标的组成及工作原理 1,分类 鼠标按接口类型可分为串行鼠标、PS/2鼠标、总线鼠标、USB鼠标(多为多为光电鼠标)四种 鼠标按其工作原理及其内部结构的不同可以分为机械式,光机式和光电式 2,组成 光电鼠标通常由以下部分组成:光学感应器、光学透镜、发光二极管、接口微处理器、轻触式按键、滚轮、连线、PS/2或USB接口、外壳等。 3,工作原理
管脚排列 管脚说明
这里主要介绍光电鼠标 光电鼠标器是通过红外线或激光检测鼠标器的位移,将位移信号转换为电脉冲信号,再通过程序的处理和转换来控制屏幕上的光标箭头的移动的一种硬件设备。光电鼠标的光电传感器取代了传统的滚球。这类传感器需要与特制的、带有条纹或点状图案的电垫板配合使用 光电鼠标器是通过检测鼠标器的位移,将位移信号转换为电脉冲信号,再通过程序的处理和转换来控制屏幕上的光标箭头的移动。光电鼠标用光电传感器代替了滚球。这类传感器需要特制的、带有条纹或点状图案的垫板配合使用。与光机鼠标发展的同一时代,出现一种完全没有机械结构的数字化光电鼠标。设计这种光电鼠标的初衷是将鼠标的精度提高到一个全新的水平,使之可充分满足专业应用的需求。这种光电鼠标没有传统的滚球、转轴等设计,其主要部件为两个发光二极管、感光芯片、控制芯片和一个带有网格的反射板(相当于专用的鼠标垫)。工作时光电鼠标必须在反射板上移动,X发光二极管和Y发光二极管会分别发射出光线照射在反射板上,接着光线会被反射板反射回去,经过镜头组件传递后照射在感光芯片上。感光芯片将光信号转变为对应的数字信号后将之送到定位芯片中专门处理,进而产生X-Y坐标偏移数据。
鼠标的定位原理 光电鼠标就是通过红外线或者激光检测鼠标的位移,将位移信号转换为电脉冲信号,通过程序的处理控制屏幕中光标箭头的移动。 一.鼠标的结构 光学鼠标主要由四部分的核心组件构成,分别就是发光二极管、透镜组件、光学引擎以及控制芯片组成。 光电鼠标的控制芯片 控制芯片负责协调光电鼠标中各元器件的工作,并与外部电路进行沟通(桥接)及各种信号的传送与收取。我们可以将其理解成就是光电鼠标中的“管家婆”,实现与主板USB接口之间的桥接。当然,它也具备了一块控制芯片所应该具备的控制、传输、协调等功能。 这里有一个非常重要的概念大家应该知道,就就是dpi对鼠标定位的影响。dpi就是它用来衡量鼠标每移动一英寸所能检测出的点数,dpi越小,用来定位的点数就越少,定位精度就低;dpi 越大,用来定位点数就多,定位精度就高。 光学感应器 光学感应器就是光电鼠标的核心。 光学感应器主要由CMOS感光块(低档摄像头上采用的感光元件)与DSP组成。CMOS感光块负责采集、接收由鼠标底部光学透镜传递过来的光线(并同步成像),然后CMOS感光块会将一帧帧生成的图像交由其内部的DSP进行运算与比较,通过图像的比较,便可实现鼠标所在位置的定位工作。
光学透镜组件 光学透镜组件被放在光电鼠标的底部位置,从图中可以清楚地瞧到,光学透镜组件由一个棱光镜与一个圆形透镜组成。 其中,棱光镜负责将发光二极管发出的光线传送至鼠标的底部,并予以照亮。圆形透镜则相当于一台摄像机的镜头,这个镜头负责将已经被照亮的鼠标底部图像传送至光学感应器底部的小孔中。通过观瞧光电鼠标的背面外壳,我们可以瞧出圆形透镜很像一个摄像头。 不管就是阻断棱光镜还就是圆形透镜的光路,均会立即导致光电鼠标“失明”。其结果就就是光电鼠标无法进行定位,由此可见光学透镜组件的重要性。 发光二极管 光学感应器要对缺少光线的鼠标底部进行连续的“摄像”,自然少不了“摄影灯”的支援。否则,从鼠标底部摄到的图像将就是一片黑暗,黑暗的图像无法进行比较,当然更无法进行光学定位了。 通常,光电鼠标采用的发光二极管就是红色的(也有部分就是蓝色的),且就是高亮的(为了获得
光电鼠标电路剖析及简单维修 发布者:1770309616发布时间:2012-3-114:18 关键词:光电鼠标,电路剖析,维修 光电鼠标的电路一般都比较简单,大多由二块集成电路组成。一块稍大的是COMS感光IC,另一块一般为鼠标专用IC。感光CMOS芯片通过鼠标移动产生的光线变化而得到位置信号,送到鼠标IC的X、Y输入端。而鼠标IC再收集左、右,滚轮键及滚轮前滚、后滚等信息随着CL K时钟信号一起送到 PS2或USB口中去。 一、USB光电鼠标。图1为使用GL603-USB鼠标IC芯片及安捷伦的H2000(400CPI、 每秒1500次扫描)为光电感应芯片的电路图。 二、PS2接口鼠标 图2为使用PAN101-208(第三代光电IC产品,800CPI光学分辨率,2000次扫描/秒)为光电感应芯片,84510系列芯片为鼠标IC的PS2接口光电鼠标电路。光电鼠标IC一般来说都比较可靠。坏的多是按键开关或是鼠标线。鼠标线四根芯中,如果VCC或GND断线时,会出现光电鼠底面感光处无红光发出,鼠标无法使用的故障。当CL K或DATA断线时,出现鼠标虽然有红光发出,但光标不动及所有按键无反应的故障。如果出现某个按键失灵时,基本是这个按键开关坏了。更换线及开关时,可以从旧的机械鼠上拆下来代用。如果光电鼠标出现某个方向移动时光标变得很慢,很可能是反射的凸镜脏了,清洗即可。
高性能光电鼠标原理及电路图 高精度光学引擎新贵自由豹210关键字:光学引擎无线鼠标
新贵的自由豹210无线鼠标应用了“九九互联,九九过界”技术,在定位和连接方面都有着出色的表现。 新贵自由豹210无线鼠标线条硬朗,设计十分现代,并有亚黑和酒红两种配色可供选择,满足不同用户的需求。这款鼠标内置高精度光学引擎,具有良好的兼容能力,可在木桌、玻璃等多种表面上正常工作,最高分辨率达到了1600dpi,并支持800/1200/1600dpi三档调节,适合不同尺寸的显示器。在安装驱动后,还能对按键功能、移动灵敏度等进行自由设定。 新贵自由豹210无线鼠标采用2.4G无线连接,具有75组频道,支持自动跳频防干扰,有效使用距离可达10米,配备的Mini接收器小巧便携,还能同时连接多个相兼容的无线键鼠,节省了宝贵的USB接口。
光电鼠标基础知识浅解 ——普通物理课外作业 班级:10-生物技术 姓名:李向阳 学号:201006040063
光电鼠标基础知识浅解 互联网的普及空前地打破了空间、时间的界限,小小鼠标,大大世界,点击之间,精彩萦绕你眼前。使用最广泛的鼠标有机械鼠标和光电鼠标,与传统的机械式鼠标相比,光电鼠标具有定位准确、移动流畅且不易脏污等优势,受到越来越多用户的认可。随着光电鼠标价格的不断下跌,取代机械式鼠标而成为市场主流的趋势已不可阻挡。 机械鼠标光电鼠标 光电鼠标的工作原理 光电鼠标定位的工作流程大致为:发光二极管照亮采样表面,对比度强烈的待采样影像通过透镜在CMOS(Complementary Metal Oxide Semiconductor---互补金属氧化物半导体,电压控制的一种放大器件。是组成CMOS数字集成电路的基本单元,CMOS制造工艺也被应用于制作数码影像器材的感光元件)上成像,CMOS将光学影像转化为矩阵电信号传输给DSP(digital singnal processor---数字信号处理器。其工作原理是接收模拟信号,转换为0或1的数字信号,再对数字信号进行修改、删除、强化,并在其他系统芯片中把数字数据解译回模拟数据或实际环境格式)。当鼠标移动时,DSP则将此影像信号与存储的上一采样周期的影像进行比较分析,然后发送一个位移距离信号到接口电路。接口电路对由DSP 发来的位移信号进行整合处理,而已传入计算机内部的位移信号再经过驱动程序的进一步处理,最终在系统中形成光标的位移。 光电鼠标的参数 分辨率
光电鼠标的分辨率通常用CPI(Count Per Inch : 每英寸的测量次数)来表示,CPI 越高,越利于反映用户的微小操作。而且在鼠标光标移动相同逻辑距离时,分辨率高的需要移动的物理距离则要短。拿一款800 CPI的光电鼠标来说,当使用者将鼠标移动1英寸时,其光学传感器就会接收到反馈回来的800个不同的坐标点,鼠标箭头同时会在屏幕上移动800个像素点。反过来,鼠标箭头在屏幕上移动一个像素点,就需要鼠标物理移动1/800英寸的距离。所以,CPI高的鼠标更适合在高分辨率的屏幕下使用。光学机械鼠标的分辨率多为200~400 CPI,而光电鼠标的分辨率通常在400~800 CPI之间。 除CPI以外,DPI(Dots Per Inch : 每英寸像素数)也常被人用来形容光电鼠标的分辨率。由于光电鼠标的分辨率反映了一个动态过程,所以用CPI来形容更恰当些。但无论是CPI还是DPI,描述的都是光电鼠标的分辨率,不存在性能差别。 刷新频率 光电鼠标的刷新频率也被称为扫描频率或者帧速率,它反映了光学传感器内部的DSP对CMOS每秒钟可拍摄图像的处理能力。在鼠标移动时,光学传感器中的数字处理器通过对比所“拍摄”相邻照片间的差异,从而确定鼠标的具体位移。但当光电鼠标在高速运动时,可能会出现相邻两次拍摄的图像中没有明显参照物的情况。那么,光电鼠标势必无法完成正确定位,也就会出现我们常说的“跳帧”现象了。而提高光电鼠标的刷新频率就加大了光学传感器的拍摄速度,也就减少了没有相同参考物的几率,达到了减少跳帧的目的。 像素处理能力 虽然分辨率和刷新率都是光电鼠标重要的技术指标,但它们并不能客观反映光电鼠标的性能,所以罗技(罗技是全球著名的电脑周边设备供应商)提出了像素处理能力这个指标,并规定:像素处理能力=CMO晶阵像素数×刷新频率。根据光电鼠标的定位原理我们知道,光学传感器会将CMOS拍摄的图像进行光学放大后再投射到CMOS晶阵上形成帧,所以在光学放大率一定的情况下,增加了CMOS晶阵像素数,也就可增大实际拍摄图像的面积。而拍摄面积越大,每帧图像上的细节也就越清晰,参考物也就越明显,和提高刷新率一样,也可减少跳帧的几率。 不过,需要注意的是,大多数情况下,厂商不会公布鼠标的CMOS尺寸,其大小从15x15到30x30像素(Pixel)不等。 光电鼠标的内部构成 从功能实现角度看,光电鼠标主要由发光二极管、固定夹、光学透镜、光学传感器、接口控制器芯片以及微动开关6部分元器件组成。
1、分辨率 光电鼠标的分辨率通常用CPI(Count Per Inch : 每英寸的测量次数)来表示,CPI 越高,越利于反映玩家的微小操作。而且在鼠标光标移动相同逻辑距离时,分辨率高的需要移动的物理距离则要短。拿一款800 CPI的光电鼠标来说,当使用者将鼠标移动1英寸时,其光学传感器就会接收到反馈回来的800个不同的坐标点,鼠标箭头同时会在屏幕上移动800个像素点。反过来,鼠标箭头在屏幕上移动一个像素点,就需要鼠标物理移动1/800英寸的距离。所以,CPI高的鼠标更适合在高分辨率的屏幕下使用。光学机械鼠标的分辨率多为200~400 CPI,而光电鼠标的分辨率通常在400~800 CPI之间。 除CPI以外,DPI(Dots Per Inch : 每英寸像素数)也常被人用来形容光电鼠标的分辨率。由于光电鼠标的分辨率反映了一个动态过程,所以用CPI来形容更恰当些。但无论是CPI还是DPI,描述的都是光电鼠标的分辨率,不存在性能差别。 2、刷新频率 光电鼠标的刷新频率也被称为扫描频率或者帧速率,它反映了光学传感器内部的DSP对CMOS每秒钟可拍摄图像的处理能力。在鼠标移动时,光学传感器中的数字处理器通过对比所“拍摄”相邻照片间的差异,从而确定鼠标的具体位移。但当光电鼠标在高速运动时,可能会出现相邻两次拍摄的图像中没有明显参照物的情况。那么,光电鼠标势必无法完成正确定位,也就会出现我们常说的“跳帧”现象了。而提高光电鼠标的刷新频率就加大了光学传感器的拍摄速度,也就减少了没有相同参考物的几率,达到了减少跳帧的目的。 3、像素处理能力 虽然分辨率和刷新率都是光电鼠标重要的技术指标,但它们并不能客观反映光电鼠标的性能,所以罗技提出了像素处理能力这个指标,并规定:像素处理能力=CMO晶阵像素数×刷新频率。根据光电鼠标的定位原理我们知道,光学传感器会将CMOS拍摄的图像进行光学放大后再投射到CMOS晶阵上形成帧,所以在光学放大率一定的情况下,增加了CMOS晶阵像素数,也就可增大实际拍摄图像的面积。而拍摄面积越大,每帧图像上的细节也就越清晰,参考物也就越明显,和提高刷新率一样,也可减少跳帧的几率。 不过,需要注意的是,大多数情况下,厂商不会公布鼠标的CMOS尺寸,其大小从15x15到30x30像素(Pixel)不等。 光电鼠标的工作原理和内部构成 光电鼠标与机械式鼠标最大的不同之处在于其定位方式不同。光电鼠标的工作原理是:在光电鼠标内部有一个发光二极管,通过该发光二极管发出的光线,照亮光电鼠标底部表面(这就是为什么鼠标底部总会发光的原因)。然后将光电鼠标底部表面反射回的一部分光线,经过一组光学透镜,传输到一个光感应器件(微成像器)内成像。这样,当光电鼠标移动时,其移动轨迹便会被记录为一组高速拍摄的连贯图像。最后利用光电鼠
传统光学鼠标的工作原理 传统光学鼠标工作原理示意图 光学跟踪引擎部分横界面示意图 光学鼠标主要由四部分的核心组件构成,分别是发光二极管、透镜组件、光学引擎(Optical Engine)以及控制芯片组成。 光学鼠标通过底部的LED灯,灯光以30度角射向桌面,照射出粗糙的表面所产生的阴影,然后再通过平面的折射透过另外一块透镜反馈到传感器上。 当鼠标移动的时候,成像传感器录得连续的图案,然后通过“数字信号处理器”(DSP)对每张图片的前后对比分析处理,以判断鼠标移动的方向以及位移,从而得出鼠标x, y方向的移动数值。再通过SPI传给鼠标的微型控制单元(Micro Controller Unit)。鼠标的处理器对这些数值处理之后,传给电脑主机。传统的光电鼠标采样频率约为3000 Frames/sec(帧/秒),也就是说它在一秒钟内只能采集和处理3000张图像。 根据上面所讲述的光学鼠标工作原理,我们可以了解到,影响鼠标性能的主要因素有哪些。 第一,成像传感器。成像的质量高低,直接影响下面的数据的进一步加工处理。 第二,DSP处理器。DSP处理器输出的x,y轴数据流,影响鼠标的移动和定位性能。
第三,SPI于MCU之间的配合。数据的传输具有一定的时间周期性(称为数据回报率),而且它们之间的周期也有所不同,SPI主要有四种工作模式,另外鼠标采用不同的MCU,与电脑之间的传输频率也会有所不同,例如125MHZ、8毫秒;500MHz,2毫秒,我们可以简单的认为MCU可以每8毫秒向电脑发送一次数据,目前已经有三家厂商(罗技、Razer、Laview)使用了2毫秒的MCU,全速USB设计,因此数据从SPI传送到MCU,以及从MCU传输到主机电脑,传输时间上的配合尤为重要。 光电鼠标电路图
产品城市化设计说明书 设计题目:振动光电鼠标设计 院系:工程机械学院 专业:工业设计 班级学号:20X X250101 课程组人员:陈生臣20XX25010116 田旭20XX25010110 周志华20XX25010120 指导老师:张伟社 20XX 年01月1
目录 1设计调查 (1) 2设计专利调查分析..........................................2-3 3专利综合分析 (3) 4设计构思...........................................................4-5 5鼠标产品设计说明 (6) 6附件 (7)
1设计调查 市场调查 通过对现有市场的调查,一般现在的市面上的鼠标样式为以下这种样式 主要是左右键,手触面还有滚轮。现在的鼠标样式基本定型了,而且消费者也亲睐与这样的拿起来舒适的鼠标样式。
2设计专利调查分析 (1)制动导光式无线光电鼠标 (2) 旧式的振动光电鼠标 首先,我们来了解一下这款旧式的振动光电鼠标,它是一款基于一般的光电鼠标外形,设计出来的一款外加振动功能的鼠标,突起的部分是振动按摩的感受区域。 功能主要:用来对人体的手掌的补位进行震动按摩,舒缓人长时间使用鼠标时的疲劳。使人体得到放松。其他的功能与一般鼠标没有很
大的区别。 缺点:按摩的区域太窄,不可以对整个手掌进行震动按摩,振动的频率是固定的,不可以调节,外形已经过时了,不美观,而且款式太单一,不能迎合广大的客户的需求。 (3)可折叠光电鼠标 3专利综合分析 根据上面的市场调查,专利调查,鼠标的大致样式适合人的手掌,不会很容易的产生疲劳感,但是却没有一项功能减轻舒缓疲劳的,而专利上的,制动导光式无线光电鼠标,可采用自然光,省电节能。振动光电鼠标,可以舒缓任长时间使用光电鼠标所带来的疲劳感,但是缺点是按摩区域太过狭小,外形不美观,而且振动的频率不可以根据人的需要来调节。可折叠式的光电鼠标,具有可折叠的功能。都有其各自的优点和不足。综合上面的情况和案例的具体分析,我们设计出了
鼠标的结构及工作原理 鼠标器(Mouse)是一种相当普通的、廉价的点输入设备(Pointing Device)。随着Windows 的日益流行,鼠标对于大多数的PC机用户来说已必不可少。较之其他的点设备(如跟踪球、数字化仪、光笔、触摸屏等),它更为便宜和方便,所以鼠标在PC机上的应用相当普及。鼠标器按与电脑连接的方式(即接口)分为:通过串行口与电脑建立连接的串口鼠标,及通过PS/2口与电脑建立连接的过PS/2鼠标。当鼠标器在平面上移动时,随着移动的方向和快慢的变化,会产生两个在高低电平之间不断变化的脉冲信号,主机接收这两个脉冲信号,并对其计数。根据接收到的这两个脉冲信号的个数,来控制电脑屏幕上的鼠标器指针在横(X)轴、纵(Y)轴两个方向上移动距离的大小。按照该方式,即可以控制鼠标器指针在屏幕上随意地移动。 脉冲信号是由鼠标器内的半导体光敏器件产生的。根据结构的不同,鼠标器主要可分为机电式鼠标和光电式鼠标。 机电式鼠标的底部有一个实心的橡胶球,内部有两个互相垂直的滚轴靠在橡胶球上。在两个滚轴的顶端,各装有一个开有径向槽(或开窗格)的光栅轮。光栅轮的两侧分别安装着由发光二极管和光敏三极管构成的光电检测电路。当移动鼠标器,橡胶球滚动时,带动滚轴及其上的光栅轮旋转。因为光栅轮开槽处透光,使得光敏三极管接收到由发光二极管发出的光线时断时续,从而产生不断变化的高低电平,形成脉冲电信号。互相垂直的两个轴对应着屏幕平面上的横(X)轴、纵(Y)轴两个方向。脉冲信号的数量对应着位移的大小。 机电式鼠标一般用摩擦滚动球的方法来进行操作,所以使用极为方便,价格也便宜。但是,这类鼠标则容易因轻微的振动,包括滚动球的跳动及滚动球与X、Y传感滚柱之间的相对位置的变化等因素而影响其精度,而且其重复定位精度也较差。由于有滚动球、传感滚柱、辅助滚柱等机械部件,故机电式鼠标器也容易因机械故障而失灵。 光电式鼠标器没有橡胶球和带光栅的轮的滚轴。这类鼠标器内的两对光电检测器互相垂直,光敏三极管检测发光二极管照射到鼠标器下面垫板上产生的反射光来进行工作,因此,光电式鼠标器工作时需要上面画有黑白相间格子的专用垫板。当发光二极管发出的光线照到黑格上,光线被吸收而无反射光;若光线照到白格上,则有反射光。光敏三极管据此而产生高低电平,形成脉冲信号。光电式鼠标没有机械部件,主要用光电位移传感器取代滚动球,所以不会出现机械故障的可能。这类传感器需要带有特制条纹或点状图案的垫子配合使用,因此光电式鼠标器有一个专用的光电极(反射板)。这类鼠标器的重定位精度较高,将鼠标从一个地点移到另一个地点再返回来,屏幕上的光标也将会精确地回到原来的位置。光电式鼠标的主要缺点是价格较贵,使用要受制于光电板的位置的局限。优点是精度高和故障率低。此外,还有一种称为轨迹球的鼠标器。它的工作原理与机电式鼠标器相同,内部结构也类似。差别是轨迹球鼠标器工作时球在上面,直接用手拨动,而球座固定不动。故轨迹球鼠标器占用的空间小,多用于便携机上。
光电鼠标上盖注塑模具设计 1.模具设计与参数计算 1.1产品的外形尺寸 总长:130mm 高度:39mm 宽度:68mm 鼠标的厚度:1~~2mm 鼠标的拔模角:0~~2 鼠标的表面粗糙度不需要太高一般在2.5~~3.6之间 而鼠标的精度要求也不是很高一般在IT5~~IT6之间 底盖筋板厚度:2mm 上盖的筋板厚度1mm 螺孔直径:3mm 1.2本塑件制品分析 产品要求 对本产品进行的工艺分析,所设计的塑件材料为丙烯氰—丁二烯—苯乙烯共聚物,材料收缩率为:0.005,进行模具设计时,其精度要求不高,故可以一次注塑两个,采用方形分布的流道布置。塑件立体图如图1所示: 图1 鼠标上盖 计算制品的体积重量 该产品为鼠标上盖,材料采用丙烯氰—丁二烯—苯乙烯共聚物也就是ABS,查书《塑料模具设计》附录得知其密度为0.0011g/mm3,收缩率为0.5%。使用pro/engineer软件对三维试题产品自动计算出产品的体积,当然也可以根据实
体尺寸手动计算出它的体积。下面是部分计算过程: 通过计算塑件的体积为:V 1=18397mm3,塑件的重量:M 1 =ρ.V 1 =1.10× 18397=20.249g,浇注系统体积:V 2≈2000mm3,浇注系统重量:M 2 =ρ.V2=0.0011 ×2000=2.2g,故M总=2M 1+M 2 =2×20.249+2.2=42.48g ρ—塑料密度 1.3注塑机的确定 根据制品的体积和重量查《塑料模具设计》选定注塑机型号为:JPH150A。 注塑机的参数如下: 注塑机最大注塑量:186g 锁模力:1500KN 注塑压力:194MPa 最小模厚:180mm 最大开距:800mm 顶出行程:80mm 注塑机定位孔直径:125mm 注塑机拉杆的间距:410×410(mm×mm) 喷嘴球半径:10mm 喷嘴前端孔径:3mm 1.4模具结构设计 由于考虑到模具的成本和市场需求量,该产品应大批量生产,故本产品使用一模二腔,浇注系统从鼠标的内壁注入,选用潜伏式浇口,而分流道设计选用U 型截面的分流道.选择Futaba SA-TYPE模架,大小为400×400mm。具体结构见模具设计图。 1.5注塑机参数校核 最大注塑量 注塑机的最大注塑量应大于制品的重量或体积(包括流道及浇口凝料飞边),通常注塑机的实际注塑量最好在注塑机的最大注塑量的80%。 所以选用的注塑机最大注塑量应0.8M机>=M塑件+M浇式中: M机——注塑机的最大注塑量,单位g。 M机>=(M塑件+M浇)/0.8=(42.48)/0.8=53.1g 而选定的注塑机注塑量为:186g,所以满足要求。 锁模力校核: 锁模力是注射机锁模装置施加于模具的最大夹紧力。锁模力的作用在于平衡和克服模腔压力产生的使模具沿分型面张开的力,保持模具紧密锁和,防止溢料。注射机锁摸力与模腔压力的关系可用下式表示: F0 ≥K.P模.A F0——注射机锁模力; K——安全系数,一般取1.1~1.2; P模——熔融型料在型腔内的压力。(40Mpa~60MPa);
I SS N1672-4305CN12-1352/N 实 验 室 科 学LABORAT ORY SC I ENCE 第3期 2009年6月No .3 Jun .2009 仪器、设备、技术 光电鼠标常见故障的排除 徐 军,王春燕,刘瑞斌,李怡文,杨敏霞 (大连理工大学基础化学实验中心,辽宁大连 116023) 摘 要:根据多年的经验,主要对光电鼠标在使用中出现的常见问题及解决方法进行详细介绍,供高校教师和相关科技工作者参考。 关键词:光电鼠标;光敏元件;灵敏度 中图分类号:TP334.2 文献标识码:B 文章编号:1672-4305(2009)03-0155-03 Repairing co mmon malfuncti ons of the optical mouse XU Jun,WANG Chun -yan,L I U Rui -bin,L I Yi -wen,Y ANG M in -xia (Funda mental Che m ical Experi m ental Center,Dalian University of Technol ogy,Dalian 116023,China )Abstract:I n order t o offer a reference f or the university teachers and researchers,the common tr ou 2bles and res oluti ons in the use of op tical mouse are intr oduced in detail based on the authors ’experi 2ences . Key words:op tical mouse;op tical components;sensitivity 自从1999年微软与安捷伦公司合作,推出了第一款光学成像鼠标(I ntelli m ouse Exp l orer )。光电鼠标就因为有着极高的适应能力和无需清洁等优点,在短短的时间里将统治了计算机桌面几十年之久的机械滚轮鼠标赶下台。图1是光电鼠标的内部构造,图2是光电鼠标电路图。因为光电鼠标是使用发光管等光敏元件来定位,所以很容易出现如灵敏度下降、指针飘移等小故障 。 图1 光电鼠标的内部构造 1 光电鼠标的工作原理 光电鼠标与机械式鼠标最大的不同之处在于其定位方式不同。光电鼠标的工作原理 [1] 是:在光电 鼠标内部有一个发光二极管,通过该发光二极管发 出的光线,照亮光电鼠标底部表面( 这就是为什么 图2 光电鼠标的电路图 鼠标底部总会发光的原因)。然后将光电鼠标底部 表面反射回的一部分光线,经过一组光学透镜,传输到一个光感应器件(微成像器)内成像。这样,当光电鼠标移动时,其移动轨迹便会被记录为一组高速拍摄的连贯图像。最后利用光电鼠标内部的一块专 用图像分析芯片(DSP,即数字微处理器),对移动轨迹上摄取的一系列图像进行分析处理,通过对这些图像上特征点位置的变化进行分析,来判断鼠标的移动方向和移动距离,从而完成光标的定位。 光电鼠标通常由以下部分组成:光学感应器、控制芯片、光学透镜、发光二极管、接口微处理器、轻触式按键、滚轮、连线、PS/2或US B 接口、外壳等。
鼠标那点事——鼠标工作原理分析 前言 经历了数年的飞速发展,如今的电脑配件以及周边的外设已经越来越好,我们最常用的鼠标从滚轮到光电,从有线到无线,有着惊人的改变。不过在鼠标的工作原理方面,依然延续着昔日的经典,没有太多的改变,只是如今的鼠标在性能上有着不小的突破。 尽管鼠标产品现在已经成为我们每天工作娱乐的必需品,但是对于鼠标的工作原理,相信了解的朋友并不多,毕竟技术这种东西比较枯燥,人们没有太多的兴趣。不过今天小编在这里还是要给大家来温习一下鼠标的工作原理,感兴趣的朋友不妨关注一下哦。
机械鼠标的工作原理 机械鼠标是通过移动鼠标,带动胶球,胶球滚动又磨擦鼠标内分管水平和垂直两个方向的栅轮滚轴,驱动栅轮转动。栅轮轮沿为格栅状。紧靠栅轮格栅两侧,一侧是一红外发光管,另一侧是红外接收组件。红外接收组件为一三端器件,其中包含甲乙两个红外接收管。在水平和垂直栅轮夹角正对方向有一压紧轮,它使胶球无论向何方向滚动都始终压紧在两个栅轮轴上。
通过ps/2 口或串口与主机相连。接口使用四根线,分别为电源,地,时钟和数据。正常工作时,鼠标的移动转换为水平和垂直栅轮不同方向和转速的转动。栅轮转动时,栅轮的轮齿周期性遮挡红外发光管发出的红外线照射到接收组件中的甲管和乙管,从而甲和乙输出端输出电脉冲至鼠标内控制芯片。由于红外接收组件中甲乙两管垂直排列,栅轮轮齿夹在红外发射与接收中间的部分的移动方向为上下方向,而甲乙接收管与红外发射管的夹角不为零,于是甲乙管输出的电脉冲有一个相位差。鼠标内控制芯片通过此脉冲相位差判知水平或垂直栅轮的转动方向,通过此脉冲的频率判知栅轮的转动速度,并不断通过数据线向主机传送鼠标移动信息,主机通过处理使屏幕上的光标同鼠标同步移动。
第一章前言 1.1鼠标的发展历史 鼠标自从诞生到今天,已经有38个年头了,这38年来,鼠标无论在性能还是工作原理上都有了许多变化。“mouse”换代发展反映了计算机技术的普及和应用电子技术的突飞猛进。同时也证明了一个结论:原创+科技进步=产品的生命。 曾经获得计算机界最权威的“图灵奖”的道格拉斯?恩格尔巴特(Douglas Englebart)博士于1968年12月9日在IEEE会议上展示了世界上第一个鼠标。如图所示:一个木质的小盒子,盒子下面有两个互相垂直的轮子,每个轮子带动一个机械变阻器获得X、Y轴上的位移,在盒子的上面则有一个按钮开关提供连通信号。鼠标的这款鼻祖与今天的鼠标结构大不相同,甚至还需要外置电源给他供电才能正常工作。然而他却引领了一个科技领域的几次革命,带给计算机工作者一次次的欢欣鼓舞。 第一个mouse 1983年苹果公司受到仙童公司著名STAR计算机的启发,在当年推出的Iisa电脑上第一次使用了鼠标作为GUI(Graphical user interface)界面操作工具。这款电脑虽然不成功,但它为转年推出的Macintosh以及MACOS操作系统提供了经验,鼠标的黄金年代来临了。这个时候的鼠标还是老式的机械式鼠标,但是对于最初的产品已经有了新的改良,鼠标球取代了不灵活的单滚球,单键设计被更加灵活的双键/三键所取代,可供电的标准RS232串行口设计取代了早期的独立接口,现代鼠标的基本结构已经成型。1982年罗技公司发明的世界第一款光机鼠标,光机结构是鼠标发展史上最大的发明。也就是这个时候现在鼠标的结构设计基本成熟,光机鼠标统治了鼠标市场达18年之久。 1984年罗技的第一款无线鼠标研制成功,那时候还依靠红外线作为信号的载体。虽然说这款产品由于性能方面的诸多问题而告失败,但是罗技在无线方面的创新也给后来的产品带来了发展的潜能。 1996年由微软发明的鼠标滚轮是鼠标发展史上十分重大的发明,今天滚轮已经成为鼠标的标配之一。现在流行的滚轮设计一般包括两种,一是机械式滚轮,也就是用滚轮来带动
鼠标那点事——鼠标工作原理分析2010-02-24 00:00:00 王成| 责编: 王成CBSi中国·PChome | 作者: 本文导航?页:前言1第?页:机械鼠标的工作原理2第?页:光电鼠标工作原理3第?)2第4页:光电鼠标工作原理(?页:总结5第1前言 经历了数年的飞速发展,如今的电脑配件以及周边的外设已经越来越好,我们最常用的鼠标从滚轮到光电,从有线到无线,有着惊人的改变。不过在鼠标的工作原理方面,依然延续着昔日的经典,没有太多的改变,只是如今的鼠标在性能上有着不小的突
破。. 尽管鼠标产品现在已经成为我们每天工作娱乐的必需品,但是对于鼠标的工作原理,相信了解的朋友并不多,毕竟技术这种东西比较枯燥,人们没有太多的兴趣。不过今天小编在这里还是要给大家来温习一下鼠标的工作原理,感兴趣的朋友不妨关注一下
哦。. 2机械鼠标的工作原理 机械鼠标是通过移动鼠标,带动胶球,胶球滚动又磨擦鼠标内分管水平和垂直两个方向的栅轮滚轴,驱动栅轮转动。栅轮轮沿为格栅状。紧靠栅轮格栅两侧,一侧是一红外发光管,另一侧是红
外接收组件。红外接收组件为一三端器件,其. 中包含甲乙两个红外接收管。在水平和垂直栅轮夹角正对方向有一压紧轮,它使胶球无论向何方向滚动都始终压紧在两个栅轮轴上。 通过ps/2 口或串口与主机相连。接口使用四根线,分别为电源,地,时钟和数据。正常工作时,鼠标的移动转换为水平和垂直栅轮不同方向和转速的转动。栅轮转动时,栅轮的轮齿周期性遮挡红外发光管发出的红外线照射到接收组件中的甲管和乙管,从而甲和乙输出端输出电脉冲至鼠标内控制芯片。由于红外接收组件中甲乙两管垂直排列,栅轮轮齿夹在红外发射与接收中间的部分的移动方向为上下方向,而甲乙接收管与红外发射管的夹角不为零,于是甲乙管输出的电脉冲有一个相位差。鼠标内控制芯片通过此脉冲相位差判知水平或垂直栅轮的转动方向,通过此脉冲的频率判知栅轮的转动速度,并不断通过数据线向主机传送鼠标移动信息,主机通过处理使屏幕上的光标同鼠标同步移
无线鼠标原理 无线鼠标原理简介: 目前的市场上售卖的基本上都是光学鼠标和激光鼠标,更古老的机械鼠标、光电机械鼠标都已经淘汰,无线鼠标也是如此。因此要明白无线鼠标的工作原理,其实并没有太大困难,可以简单理解为:无线鼠标=有线鼠标-数据线+无线模块,这样是不是直白多了呢?
光学鼠标的工作原理如上图,LED或者Laser发出的光通过透镜,照射在鼠标工作表面(比如鼠标垫、或者桌面)上,部分反射光通过透镜进入成像传感器成像,并提供给图像分析芯片(DSP 数字微处理器)进行分析;当鼠标移动时,传感器就会截获一组高速拍摄的连贯图像,经DSP芯片分析处理后,得出鼠标的移动方向和移动量,并将这一信息传输给电脑,于是便有了桌面光标的移动行为。 CMOS成像传感器和DSP两部分合称鼠标的光学引擎,激光引擎和普通光学引擎的差异是,采用了具有相干性、波长单一、功率集中的激光(Laser)取代LED光来照射工作表面,这样可以提高鼠标对不同工作表面的适应能力,目前高端无线鼠标也大都采用激光引擎。
图中NRF字样的小方块就是2.4G无线芯片 其实无线鼠标和传统有线鼠标基本上是一样的,区别主要集中在最后一步的数据传输方式上,有线鼠标通过PS/2或者USB接口的数据线传输信息,而无线鼠标则采用红外、27MHz、2.4GHz和蓝牙等无线传输技术发送数据,摒弃了数据线,使用起来“无牵无挂”,自然更加方便。 无线传输技术介绍: 无线技术根据不同的用途和频段被分为不同的类别,其中包括蓝牙、Wi-Fi (IEEE 802.11)、Infrared (IrDA)、ZigBee (IEEE 802.15.4)等等多个无线技术标准,但市场上产品最多、消费者接触最广的,也仅有27Mhz、2.4G和蓝牙无线鼠标共三类。 27 MHz RF技术
光电鼠标的工作原理 摘要本文从结构、工作原理、性能参数以及和传统鼠标的对比等几个方面详细介绍了光电鼠标,并且简单介绍了激光鼠标的相关特性,最后对鼠标的未来发展趋势进行了简单的展望。 关键词光电鼠标光学感应器激光鼠标发展趋势 一、鼠标的概述 鼠标,全称为光电显示系统纵横位置指示器,是计算机系统的一种输入设备,因形似老鼠而得名。按其工作原理及其内部结构的不同可以分为机械式鼠标,光机式鼠标和光电式鼠标。下面将简单介绍机械式鼠标和光机式鼠标的工作原理: 1、机械式鼠标 机械鼠标主要由滚球、辊柱和光栅信号传感器组成。当拖动鼠标时,带动滚球转动,滚球又带动辊柱转动,装在辊柱端部的光栅信号传感器产生的光电脉冲信号反映出鼠标器在垂直和水平方向的位移变化,再通过电脑程序的处理和转换来控制屏幕上光标箭头的移动。这种机械鼠标的底部采用一个可四向滚动的胶质小球。这个小球在滚动时会带动一对转轴转动,分别为X转轴、Y转轴,在转轴的末端都有一个圆形的译码轮,译码轮上附有金属导电片与电刷直接接触。当转轴转动时,这些金属导电片与电刷就会依次接触,出现“接通”或“断开”两种形态,前者对应二进制数“1”、后者对应二进制数“0”。接下来,这些二进制信号被送交鼠标内部的专用芯片作解析处理并产生对应的坐标变化信号。只要鼠标在平面上移动,小球就会带动转轴转动,进而使译码轮的通断情况发生变化,产生一组组不同的坐标偏移量,反应到屏幕上,就是光标可随着鼠标的移动而移动。由于它采用纯机械结构,定位精度难如人意,加上频频接触的电刷和译码轮磨损得较为厉害,直接影响了机械鼠标的使用寿命。在流行一段时间之后,它就被成本同样低廉的“光机鼠标”所取代,后者正是现在市场上还很常见的所谓“机械鼠标”。 2、光机式鼠标 光机式鼠标,顾名思义是一种光电和机械相结合的鼠标。它在机械鼠标的基础上,将磨损最厉害的接触式电刷和译码轮改为非接触式的LED对射光路元件。当小球滚动时,
目录 一、鼠标的分类 ............................................................................ 错误!未定义书签。鼠标按其工作原理及其内部结构的不同可以分为机械式和光电式错误!未定义书签。 机械鼠标错误!未定义书签。 光电鼠标错误!未定义书签。 按键数是指鼠标按键的数量。错误!未定义书签。 两键鼠标错误!未定义书签。 三键鼠标错误!未定义书签。 多键鼠标错误!未定义书签。 鼠标按接口类型分类错误!未定义书签。 串行鼠标错误!未定义书签。 PS/2鼠标错误!未定义书签。 连接方式,分为有线鼠标和无线鼠标错误!未定义书签。 无线鼠标错误!未定义书签。 有线鼠标错误!未定义书签。 特别新功能的鼠标错误!未定义书签。 滚轴鼠标错误!未定义书签。 感应鼠标错误!未定义书签。 3D振动鼠标错误!未定义书签。 二、典型鼠标在形态,材料,功能上的分析错误!未定义书签。 雷柏3500P超薄无线鼠标错误!未定义书签。 游戏鼠标错误!未定义书签。 Swiftpoint GT 自然触摸手势鼠标错误!未定义书签。 Logitech/罗技M557无线蓝牙鼠标错误!未定义书签。 三、惠普FM500鼠标的使用方面的分析错误!未定义书签。 重要参数介绍错误!未定义书签。
功能介绍错误!未定义书签。 柔软舒适滚轮设计错误!未定义书签。 兼容性强错误!未定义书签。 人体工程学设计错误!未定义书签。 使用原理错误!未定义书签。 使用过程错误!未定义书签。 四、惠普FM500生态蓝影鼠标的结构分析错误!未定义书签。产品连接错误!未定义书签。 机械连接销连接错误!未定义书签。 机械连接弹性卡口连接错误!未定义书签。 活动连接错误!未定义书签。 弹性连接错误!未定义书签。 五、模型展示错误!未定义书签。 各零件展示错误!未定义书签。 爆炸图展示错误!未定义书签。 六、鼠标的改进性建议错误!未定义书签。 七、设计心得错误!未定义书签。 想错误!未定义书签。 练错误!未定义书签。 久错误!未定义书签。
鼠标的组成及工作原理 1,分类 鼠标按接口类型可分为串行鼠标、PS/2鼠标、总线鼠标、USB鼠标(多为多为光电鼠标)四种 鼠标按其工作原理及其内部结构的不同可以分为机械式,光机式和光电式2,组成 光电鼠标通常由以下部分组成:光学感应器、光学透镜、发光二极管、接口微处理器、轻触式按键、滚轮、连线、PS/2或USB接口、外壳等。 3,工作原理
管脚排列 管脚说明
这里主要介绍光电鼠标 光电鼠标器是通过红外线或激光检测鼠标器的位移,将位移信号转换为电脉冲信号,再通过程序的处理和转换来控制屏幕上的光标箭头的移动的一种硬件设备。光电鼠标的光电传感器取代了传统的滚球。这类传感器需要与特制的、带有条纹或点状图案的电垫板配合使用 光电鼠标器是通过检测鼠标器的位移,将位移信号转换为电脉冲信号,再通过程序的处理和转换来控制屏幕上的光标箭头的移动。光电鼠标用光电传感器代替了滚球。这类传感器需要特制的、带有条纹或点状图案的垫板配合使用。与光机鼠标发展的同一时代,出现一种完全没有机械结构的数字化光电鼠标。设计这种光电鼠标的初衷是将鼠标的精度提高到一个全新的水平,使之可充分满足专业应用的需求。这种光电鼠标没有传统的滚球、转轴等设计,其主要部件为两个发光二极管、感光芯片、控制芯片和一个带有网格的反射板(相当于专用的鼠标垫)。工作时光电鼠标必须在反射板上移动,X发光二极管和Y 发光二极管会分别发射出光线照射在反射板上,接着光线会被反射板反射回去,经过镜头组件传递后照射在感光芯片上。感光芯片将光信号转变为对应的数字信号后将之送到定位芯片中专门处理,进而产生X-Y坐标偏移数据。
光电鼠标内部结构 光电鼠标通常由以下部分组成:光学感应器、光学透镜、发光二极管、接口微处理器、轻触式按键、滚轮、连线、PS/2或USB接口、外壳等。下面分别进行介绍: 目录 ? 1 光学感应器 ? 2 光电鼠标的控制芯片 ? 3 光学透镜组件 ? 4 发光二极管 ? 5 轻触式按键 光学感应器 光学感应器是光电鼠标的核心,目前能够生产光学感应器的厂家只有安捷伦、微软和罗技三家公司。其中,安捷伦公司的光学感应器使用十分广泛,除了微软的全部和罗技的部分光电鼠标之外,其他的光电鼠标基本上都采用了安捷伦公司的光学感应器。 图1:光电鼠标内部的光学感应器 安捷伦公司的光学感应器主要由CMOS感光块(低档摄像头上采用的感光元件)和DSP组成。CMOS感光块负责采集、接收由鼠标底部光学透镜传递过来的光线(并同步成像),然后CMOS感光块会将一帧帧生成的图像交由其内部的DSP进行运算
和比较,通过图像的比较,便可实现鼠标所在位置的定位工作。 图2:光学感应器内部的组成方式 图1是方正光电鼠内部的光学感应器,它采用的是安捷伦公司的H2000-A0214光学感应元件,其芯片内部的组成方式可参见图2。图3是H2000-A0214光学感应器的背面,从图中我们可以看到,芯片上有一个小孔,这个小孔用来接收由鼠部底部的光学透镜传送过来的图像。 图3光学感应器背面的小孔用来接收由鼠部底部的光学透镜传送过来的图像 [编辑] 光电鼠标的控制芯片 控制芯片负责协调光电鼠标中各元器件的工作,并与外部电路进行沟通(桥接)及各种信号的传送和收取。我们可以将其理解成是光电鼠标中的“管家婆”。图4是罗技公司的CP5919AM控制芯片,它可以配合安捷伦的H2000-A0214光学感应元件,实现与主板USB接口之间的桥接。当然,它也具备了一块控制芯片所应该具备的控制、传输、协调等功能。 这里有一个非常重要的概念大家应该知道,就是dpi对鼠标定位的影响。dpi是它用来衡量鼠标每移动一英寸所能检测出的点数,dpi越小,用来定位的点数就
本科毕业论文(设计) 论文题目:人机工程学鼠标创新设计 姓名:王杰 学号:103004020209 班级:1002班 年级:2010级 专业:工业设计 学院:机械工程学院 指导教师:梁之臻 完成时间:2014年5月14日
作者声明 本毕业论文(设计)是在导师的指导下由本人独立撰写完成的,没有剽窃、抄袭、造假等违反道德、学术规范和其他侵权行为。对本论文(设计)的研究做出重要贡献的个人和集体,均已在文中以明确方式标明。因本毕业论文(设计)引起的法律结果完全由本人承担。 毕业论文(设计)成果归武汉工业学院工商学院所有。 特此声明。 作者专业:工业设计 作者学号:103004020209 作者签名: 年月日
人机工程学鼠标创新设计 王杰 Ergonomic mouse innovative design Wang,jie 2014年 4 月22日
摘要 工业产品造型设计是把美学与工程技术相结合的一门特殊的学科。在当代工业飞速发展的背景下,工业设计早已不再是简单的技术与艺术的结合,而是材料学、工程学、应用美学、结构力学等体系的充分结合,以达到对生活的设计。同时,这种设计也是一种创造行为,对于新事物的创造实质是“创造一种更为合理的生存方式”。即要求生活上的安全,便捷,高效。对于产品而言,也就是要本着“以人为本”的设计思想,创造出更加实用,对人本身生活习惯或者健康的负影响更小的产品。而鼠标的工业设计在于外型和功能以及色彩等这几方面的设计。其目的就是让使用者在不影响其身体健康和不改变使用习惯的基础上,最大限度地带给用户以高效,愉悦的使用环境,从而达到人机之间更好的交互过程。 关键词:鼠标;人机工程学;创新