半导体材料测量(measurement for semiconductor material)
用物理和化学分析法检测半导体材料的性能和评价其质量的方法。它对探索新材料、新器件和改进工艺控制质量起重要作用。在半导体半barl材料制备过程中,不仅需要测量半导体单晶中含有的微量杂质和缺陷以及表征其物理性能的特征参数,而且由于制备半导体薄层和多层结构的外延材料,使测量的内容和方法扩大到薄膜、表面和界面分析。半导体材料检测技术的进展大大促进了半导体科学技术的发展。半导体材料测量包括杂质检测、晶体缺陷观测、电学参数测试以及光学测试等方法。
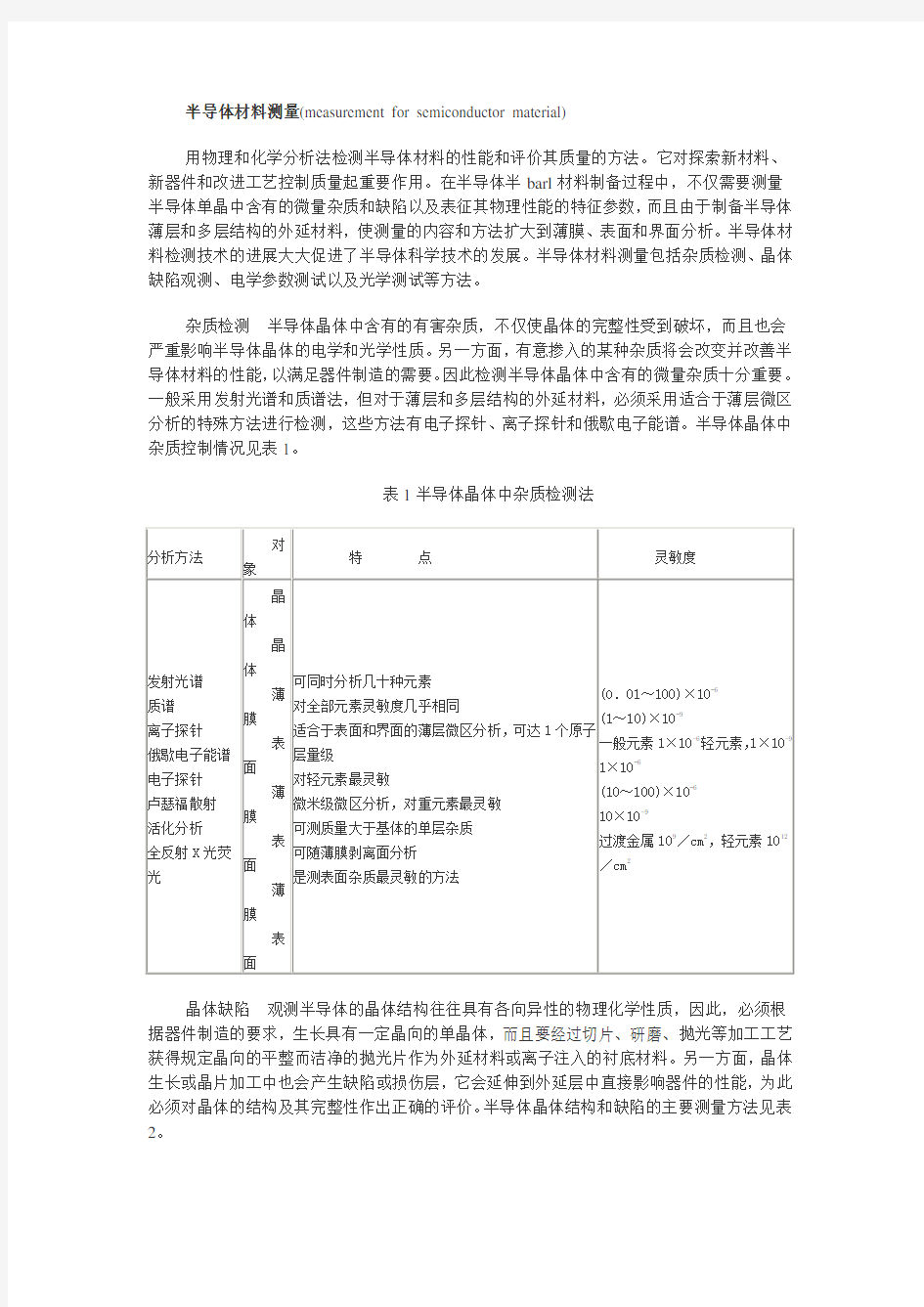
杂质检测半导体晶体中含有的有害杂质,不仅使晶体的完整性受到破坏,而且也会严重影响半导体晶体的电学和光学性质。另一方面,有意掺入的某种杂质将会改变并改善半导体材料的性能,以满足器件制造的需要。因此检测半导体晶体中含有的微量杂质十分重要。一般采用发射光谱和质谱法,但对于薄层和多层结构的外延材料,必须采用适合于薄层微区分析的特殊方法进行检测,这些方法有电子探针、离子探针和俄歇电子能谱。半导体晶体中杂质控制情况见表1。
表1半导体晶体中杂质检测法
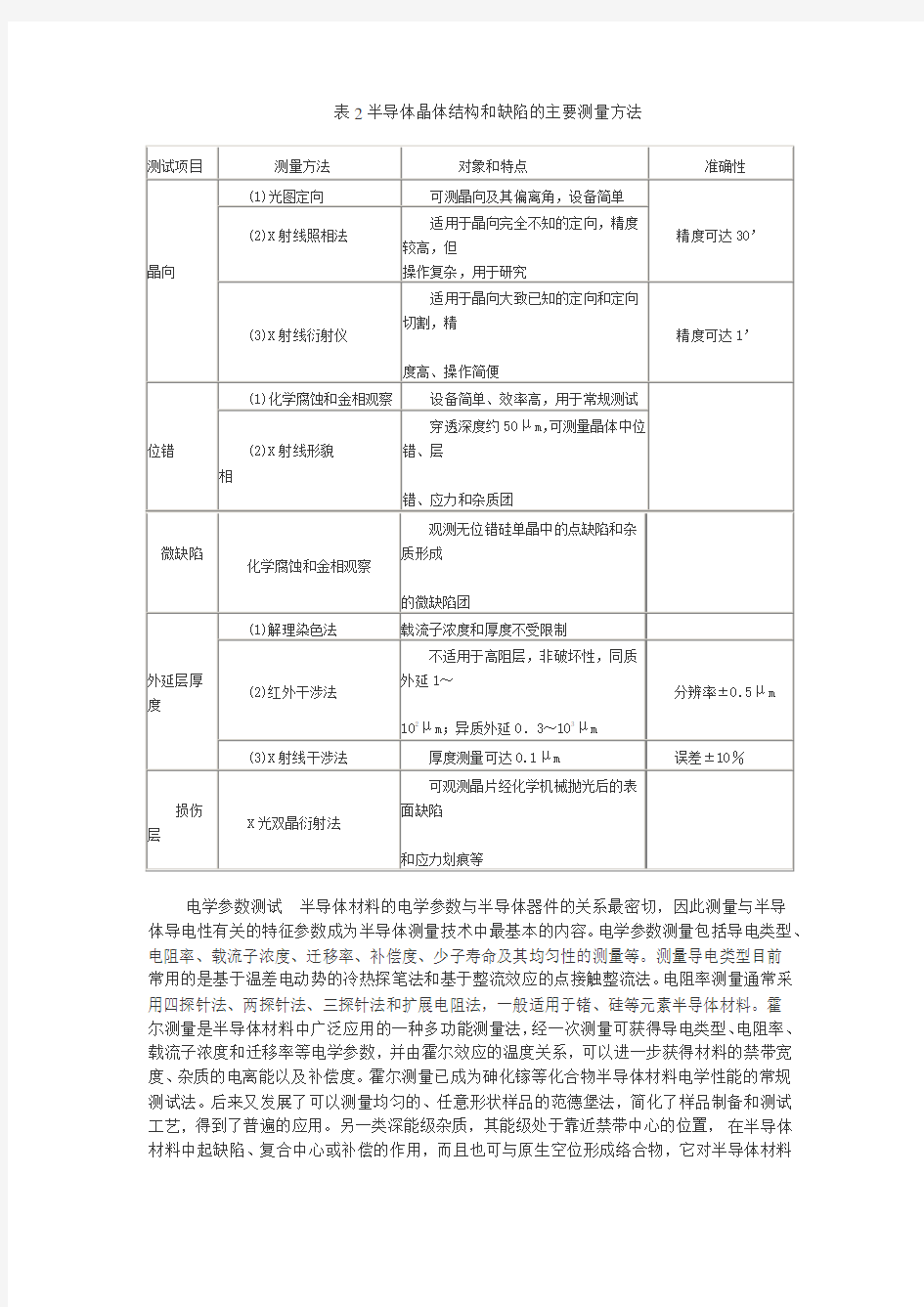
晶体缺陷观测半导体的晶体结构往往具有各向异性的物理化学性质,因此,必须根据器件制造的要求,生长具有一定晶向的单晶体,而且要经过切片、研磨、抛光等加工工艺获得规定晶向的平整而洁净的抛光片作为外延材料或离子注入的衬底材料。另一方面,晶体生长或晶片加工中也会产生缺陷或损伤层,它会延伸到外延层中直接影响器件的性能,为此必须对晶体的结构及其完整性作出正确的评价。半导体晶体结构和缺陷的主要测量方法见表2。
表2半导体晶体结构和缺陷的主要测量方法
电学参数测试半导体材料的电学参数与半导体器件的关系最密切,因此测量与半导
体导电性有关的特征参数成为半导体测量技术中最基本的内容。电学参数测量包括导电类型、电阻率、载流子浓度、迁移率、补偿度、少子寿命及其均匀性的测量等。测量导电类型目前常用的是基于温差电动势的冷热探笔法和基于整流效应的点接触整流法。电阻率测量通常采用四探针法、两探针法、三探针法和扩展电阻法,一般适用于锗、硅等元素半导体材料。霍尔测量是半导体材料中广泛应用的一种多功能测量法,经一次测量可获得导电类型、电阻率、载流子浓度和迁移率等电学参数,并由霍尔效应的温度关系,可以进一步获得材料的禁带宽度、杂质的电离能以及补偿度。霍尔测量已成为砷化镓等化合物半导体材料电学性能的常规测试法。后来又发展了可以测量均匀的、任意形状样品的范德堡法,简化了样品制备和测试工艺,得到了普遍的应用。另一类深能级杂质,其能级处于靠近禁带中心的位置,在半导体材料中起缺陷、复合中心或补偿的作用,而且也可与原生空位形成络合物,它对半导体材料的电学性质产生重大影响。对这种深能级杂质的检测比较困难,目前用结电容技术进行测量取得了较大进展,所用方法有热激电容法、光电容法和电容瞬态法,后又发展了深能级瞬态能谱法,可以快速地测量在较宽能量范围内的多个能级及其浓度。外延材料中载流子浓度的剖面分布采用电容一电压法,可测深度受结或势垒雪崩击穿的限制,随浓度的增加而减小。在此基础上建立的电化学电容一电压法,它是利用电解液阳极氧化来实现载流子浓度剖面分布的连续测量,特别适用于Ⅲ-V族化合物半导体材料和固溶体等多层结构的外延材料。测
量半导体材料中少数载流子寿命的方法有多种,广泛应用的是交流光电导衰退法,简便迅速,测量范围为10~103μs。,适合于锗、硅材料。半导体材料电学参数测量方法列于表3中。
表3半导体材料电学参数测量方法
光学测试法光学检测技术对半导体材料中的杂质和缺陷具有很高的灵敏度,可以检测非电活性杂质以及杂质与结构缺陷形成的络合物,而且在量子能量和样品空间大小的探测上具有很高的分辨率,特别适合于微区薄层和表面分析。除了用于锗、硅晶体中超微量杂质的分析外,由于Ⅲ-V族化合物半导体材料中存在部分离子键成分,光与晶体中电子的耦合比较强,使光学效应大大增强。这些材料又广泛用于光电器件,光谱范围处于可见光和近红外区域,测试仪器不太复杂,探测器的灵敏度高,因此特别适合于Ⅲ-V族一类的化合物半
导体材料。光学测试主要用于杂质的识别和超微量分析,而且利用发光光谱可以研究与杂质、缺陷、位错、应力、补偿率等的对应关系,作出晶体均匀性和完整性的判据,因此光学分析得到了广泛的应用。半导体材料光学测量法列于表4中。
表4半导体材料光学测量法
水准测量的原理 一、几种常见的水准测量方法 1.几何水准测量(简称水准测量); 2.三角高程测量; 3.气压高程测量(物理高程测量)。 二、水准测量原理 水准测量 就是利用水平视线来求得两点的高差。例如图2-1中,为了求出A 、B 两点的高差AB h ,在A 、B 两个点上竖立带有分划的标尺——水准尺,在A 、B 两点之间安置可提供水平视线的仪器——水准仪。当视线水平时,在A 、B 两个点的标尺上分别读得读数a 与b,则A 、B 两点的高差等于两个标尺读数之差。即: b a h AB -= (2-1) 如果A 为已知高程的点,B 为待求高程的点,则B 点的高程为: AB A B h H H += (高差法) (2-2) 读数a 就是在已知高程点上的水准尺读数,称为“后视读数”;b 就是在待求高程点上的水准尺读数,称为“前视读数”。高差必须就是后视读数减去前视读数。高差AB h 的值可能就是正,也可能就是负,正值表示待求点B 高于已知点A,负值表示待求点B 低于已知点A 。此外,高差的正负号又与测量进行的方向有关,例如图2-2中测量由A 向B 进行,高差用AB h 表示,其值为正;反之由B 向A 进行,则高差用BA h 表示,其值为负。所以说明高差时必须标明高差的正负号,同时要说明测量进行的方向。 图 2-1 由图2-1可以瞧出,B 点高程还可以通过仪器的视线高程H i 来计算,即 H i =H A +a (2-3) H B =H i -b (仪高法) (2-4) 三、转点、测站 当两点相距较远或高差太大时,则可分段连续进行,从图2-2中可得: b a h h b a h b a h b a h AB n n n ∑-∑=∑=-=-=-=Λ Λ2 221 11 (2-5)
机器视觉测量技术杨永跃合肥工业大学 2007.3 目录 第一章绪论 1.1 概述 1.2 机器视觉的研究内容 1.3 机器视觉的应用 1.4 人类视觉简介 1.5 颜色和知觉 1.6 光度学 1.7 视觉的空间知觉 1.8 几何基础 第二章图像的采集和量化 2.1 采集装置的性能指标 2.2 电荷藕合摄像器件 2.3 CCD 相机类 2.4 彩色数码相机 2.5 常用的图像文件格式
2.6 照明系统设计 第三章光学图样的测量 3.1 全息技术 3.2 散斑测量技术 3.3 莫尔条纹测量技术 3.4 微图像测量技术 第四章标定方法的研究 4.1 干涉条纹图数学形成与特征4.2 图像预处理方法 4.3 条纹倍增法 4.4 条纹图的旋滤波算法 第五章立体视觉 5.1 立体成像 2 5.2 基本约束 5.3 边缘匹配 5.4 匹域相关性 5.5 从 x 恢复形状的方法 5.6 测距成像
第六章标定 6.1 传统标定 6.2 Tsais 万能摄像机标定法 6.3 Weng ’ s 标定法 6.4 几何映射变换 6.5 重采样算法 第七章目标图像亚像素定位技术第八章图像测量软件 (多媒体介绍 第九章典型测量系统设计分析9.1 光源设计 9.2 图像传感器设计 9.3 图像处理分析 9.4 图像识别分析 附:教学实验 1、视觉坐标测量标定实验 2、视觉坐标测量的标定方法。 3、视觉坐标测量应用实验 4、典型零件测量方法等。
3 第一章绪论 1.1 概述 人类在征服自然、改造自然和推动社会进步的过程中,面临着自身能力、能量的局限性, 因而发明和创造了许多机器来辅助或代替人类完成任务。智能机器或智能机器人是这种机器最理想的模式。 智能机器能模拟人类的功能、能感知外部世界,有效解决问题。 人类感知外部世界:视觉、听觉、嗅觉、味觉、触觉 眼耳鼻舌身 所以对于智能机器,赋予人类视觉功能极其重要。 机器视觉:用计算机来模拟生物(外显或宏观视觉功能的科学和技术。 机器视觉目标:用图像创建或恢复现实世界模型,然后认知现实世界。 1.2 机器视觉的研究内容 1 输入设备成像设备:摄像机、红外线、激光、超声波、 X 射线、 CCD 、数字扫描仪、超声成像、 CT 等 数字化设备 2 低层视觉(预处理 :对输入的原始图像进行处理(滤波、增强、边缘检测 ,提取角点、边缘、线条色彩等特征。 3 中层视觉:恢复场景的深度、表面法线,通过立体视觉、运动估计、明暗特征、纹理分析。系统标定
方法简介 视距测量是利用经纬仪、水准仪的望远镜内十字丝分划板上的视距丝在视距尺(水准尺)上读数,根据光学和几何学原理,同时测定仪器到地面点的水平距离和高差的一种方法。这种方法具有操作简便、速度快、不受地面起伏变化的影响的优点,被广泛应用于碎部测量中。但其测距精度低,约为:1/200-1/300。 一、视距测量原理 1.视线水平时的距离与高差公式 欲测定A、B两点间的水平距离D及高差h,可在A点安置经纬仪,B 点立视距尺,设望远镜视线水平,瞄准B点视距尺,此时视线与视距尺垂直。求得上,下视距丝读数之差。上,下丝读数之差称为视距间隔或尺间隔。 2.视线倾斜时的距离与高差公式 在地面起伏较大的地区进行视距测量的,必须使视线倾斜才能读取视距间隔。由于视线不垂直于视距尺,故不能直接应用上述公式。 二、视距测量的观测与计算 施测时,安置仪器于A点,量出仪器高i,转动照准部瞄准B点视距尺,分别渎取上、下、中三丝的读数,计算视距间隔。再使竖盘指标水准管气泡居中(如为竖盘指标自动补偿装置的经纬仪则无此项操作),读取竖盘读数,并计算竖直角。用计算器计算出水平距离和高差。 三、视距测量误差及注意事项 1.视距测量的误差 读数误差用视距丝在视距尺上读数的误差,与尺子最小分划的宽度、水平距离的远近和望远镜放大倍率等因素有关,因此读数误差的大小,视使用的仪器,作业条件而定。 垂直折光影响祝距尺不同部分的光线是通过不同密度的空气层到达望远镜的,越接近地面的光线受折光影响越显著。经验证明,当视线接近地面在视距尺上读数时,垂直折光引起的误差较大,并且这种误差与距离的平方成比例地增加。 视距尺倾斜所引起的误差视距尺倾斜误差的影响与竖直角有关,尺身倾斜对视距精度的影响很大。
第二章 水准测量 高程是确定地面点位置的要素之一,在工程建设的设计、施工与管理等阶段都具有十分重要的作用。测定地面点高程的工作称为高程测量。高程测量按所使用的仪器和施测方法不同,主要有水准测量和三角高程测量等。水准测量是高程测量中最常用的一种方法。本章主要介绍水准测量原理、水准仪的构造及其使用、水准测量的施测方法与成果整理以及仪器的检验与校正等内容。 2-1 水准测量原理 水准测量不是直接测定地面点的高程,而是测出两点间的高差。即在两个点上分别竖立水准尺,利用水准测量的仪器提供的一条水平视线,瞄准并在水准尺上读数,求得两点间的高差,从而由已知点高程推求未知点高程。 如图2-1所示,设已知A 点高程为A H ,用水准测量方法求未知点B 的高程B H 。在A 、B 两点中间安置水准仪,并在A 、B 两点上分别竖立水准尺,根据水准仪提供的水平视线在A 点水准尺上读数为a ,在B 点的水准尺上读数为b ,则A 、B 两点间的高差为: b a h AB -= (2-1) 图2-1 水准测量
原理 设水准测量是由A 点向B 点进行,如图2-1中箭头所示,则规定A 点为后视点,其水准尺读数a 为后视读数;B 点为前视点,其水准尺读数b 为前视读数。由此可见,两点之间的高差一定是“后视读数”减“前视读数”。如果a >b ,则高差AB h 为正,表示B 点比A 点高;如果a 角度测量的原理及其方法
角度测量的原理及其方法 角度测量原理 一、水平角测量原理 地面上两条直线之间的夹角在水平面上的投影称为水平角。如图 3-1所示,A、B、O为地面上的任意点,通OA和OB直线各作一垂 直面,并把OA和OB分别投影到水平投影面上,其投影线Oa和Ob 的夹角∠aOb,就是∠AOB的水平角β。 如果在角顶O上安置一个带有水平刻度盘的测角仪器,其度盘 中心O′在通过测站O点的铅垂线上,设OA和OB两条方向线在水 平刻度盘上的投影读数为a1和b1,则水平角β为: β= b1 - a1(3-1) 二、竖直角测量原理 在同一竖直面内视线和水平线之间的夹角称为竖直角或称垂直 角。如图3-2所示,视线在水平线之上称为仰角,符号为正;视线在 水平线之下称为俯角,符号为负。
图3-1 水平角测量原理图图3-2 竖直角测 量原理图 如果在测站点O上安置一个带有竖直刻度盘的测角仪器,其竖盘中心通过水平视线,设照准目标点A时视线的读数为n,水平视线的读数为m,则竖直角α为: α= n - m (3-2) 光学经纬仪 一、DJ6级光学经纬仪的构造 它主要由照准部(包括望远镜、竖直度盘、水准器、读数设备)、水平度盘、基座三部分组成。现将各组成部分分别介绍如下:1.望远镜 望远镜的构造和水准仪望远镜构造基本相同,是用来照准远方目标。它和横轴固连在一起放在支架上,并要求望远镜视准轴垂直于横轴,当横轴水平时,望远镜绕横轴旋转的视准面是一个铅垂面。为了控制望远镜的俯仰程度,在照准部外壳上还设置有一套望远镜制动和
微动螺旋。在照准部外壳上还设置有一套水平制动和微动螺旋,以控制水平方向的转动。当拧紧望远镜或照准部的制动螺旋后,转动微动螺旋,望远镜或照准部才能作微小的转动。 2.水平度盘 水平度盘是用光学玻璃制成圆盘,在盘上按顺时针方向从0°到360°刻有等角度的分划线。相邻两刻划线的格值有1°或30′两种。度盘固定在轴套上,轴套套在轴座上。水平度盘和照准部两者之间的转动关系,由离合器扳手或度盘变换手轮控制。 3.读数设备 我国制造的DJ6型光学经纬仪采用分微尺读数设备,它把度盘和分微尺的影像,通过一系列透镜的放大和棱镜的折射,反映到读数显微镜内进行读数。在读数显微镜内就能看到水平度盘和分微尺影像,如图3-4所示。度盘上两分划线所对的圆心角,称为度盘分划值。 在读数显微镜内所见到的长刻划线和大号数字是度盘分划线及其注记,短刻划线和小号数字是分微尺的分划线及其注记。分微尺的长度等于度盘1°的分划长度,分微尺分成6大格,每大格又分成10,每小格格值为1′,可估读到0.1′。分微尺的0°分划线是其指标线,它所指度盘上的位置与度盘分划线所截的分微尺长度就是分微尺读数值。为了直接读出小数值,使分微尺注数增大方向与度盘注数方向相反。读数时,以在分微尺上的度盘分划线为准读取度数,而后读取该度盘分划线与分微尺指标线之间的分微尺读数的分数,并估读
机器视觉测量技术 杨永跃 合肥工业大学 2007.3
目录第一章绪论 1.1 概述 1.2 机器视觉的研究内容 1.3 机器视觉的应用 1.4 人类视觉简介 1.5 颜色和知觉 1.6 光度学 1.7 视觉的空间知觉 1.8 几何基础 第二章图像的采集和量化 2.1 采集装置的性能指标 2.2 电荷藕合摄像器件 2.3 CCD相机类 2.4 彩色数码相机 2.5 常用的图像文件格式 2.6 照明系统设计 第三章光学图样的测量 3.1 全息技术 3.2 散斑测量技术 3.3 莫尔条纹测量技术 3.4 微图像测量技术 第四章标定方法的研究 4.1 干涉条纹图数学形成与特征 4.2 图像预处理方法 4.3 条纹倍增法 4.4 条纹图的旋滤波算法 第五章立体视觉 5.1 立体成像
5.2 基本约束 5.3 边缘匹配 5.4 匹域相关性 5.5 从x恢复形状的方法 5.6 测距成像 第六章标定 6.1 传统标定 6.2 Tsais万能摄像机标定法 6.3 Weng’s标定法 6.4 几何映射变换 6.5 重采样算法 第七章目标图像亚像素定位技术 第八章图像测量软件 (多媒体介绍) 第九章典型测量系统设计分析9.1 光源设计 9.2 图像传感器设计 9.3 图像处理分析 9.4 图像识别分析 附:教学实验 1、视觉坐标测量标定实验 2、视觉坐标测量的标定方法。 3、视觉坐标测量应用实验 4、典型零件测量方法等。
第一章绪论 1.1 概述 人类在征服自然、改造自然和推动社会进步的过程中,面临着自身能力、能量的局限性,因而发明和创造了许多机器来辅助或代替人类完成任务。智能机器或智能机器人是这种机器最理想的模式。 智能机器能模拟人类的功能、能感知外部世界,有效解决问题。 人类感知外部世界:视觉、听觉、嗅觉、味觉、触觉 眼耳鼻舌身 所以对于智能机器,赋予人类视觉功能极其重要。 机器视觉:用计算机来模拟生物(外显或宏观)视觉功能的科学和技术。 机器视觉目标:用图像创建或恢复现实世界模型,然后认知现实世界。 1.2 机器视觉的研究内容 1 输入设备成像设备:摄像机、红外线、激光、超声波、X射线、CCD、数字扫描仪、 超声成像、CT等 数字化设备 2 低层视觉(预处理):对输入的原始图像进行处理(滤波、增强、边缘检测),提取角 点、边缘、线条色彩等特征。 3 中层视觉:恢复场景的深度、表面法线,通过立体视觉、运动估计、明暗特征、纹理 分析。系统标定 4 高层视觉:在以物体为中心的坐标系中,恢复物体的完整三维图,识别三维物体,并 确定物体的位置和方向。 5 体系结构:根据系统模型(非具体的事例)来研究系统的结构。(某时期的建筑风格— 据此风格设计的具体建筑) 1.3 机器视觉的应用 工业检测—文件处理,毫微米技术—多媒体数据库。 许多人类视觉无法感知的场合,精确定量感知,危险场景,不可见物感知等机器视觉更显其优越十足。 1 零件识别与定位
一、视距测量的概念 视距测量是根据几何光学原理,利用仪器望远镜筒内的视距丝在标尺上截取读数,应用三角公式计算两点距离,可同时测定地面上两点间水平距离和高差的测量方法。视距测量的优点是,操作方便、观测快捷,一般不受地形影响。其缺点是,测量视距和高差的精度较低,测距相对误差约为1/200~1/300。尽管视距测量的精度较低,但还是能满足测量地形图碎部点的要求,所以在测绘地形图时,常采用视距测量的方法测量距离和高差。 二、视距测量的计算公式 (一)望远镜视线水平时测量平距和高差的计算公式 如图4-7 所示,测地面两点的水平距离和高差,在点安置仪器,在点竖立视距尺,当望远镜视线水平时,水平视线与标尺垂直,中丝读数为,上下视距丝在视距尺上的位置读数之差称为视距间隔,用表示。 1、水平距离计算公式 设仪器中心到物镜中心的距离为,物镜焦距为,物镜焦点到点的距离为,由图4-7可知两点间的水平距离为,根据图中相似三角形成比例的关系得两点间水平距离为: (4-7)式中:为视距乘常数,用表示,其值在设计中为100。为视距加常数,仪器设计为0。 则视线水平时水平距离公式:
(4-8) 式中—视距乘常数其值等于100。 —视距间隔。 2、高差的计算公式: 两点间的高差由仪器高和中丝读数求得,即: (4-9) 式中:—仪器高,地面点至仪器横轴中心的高度。 (二)望远镜视线倾斜时测量平距和高差的公式 在地面起伏比较大的地区进行视距测量时,需要望远镜倾斜才能照准视距标尺读取读数,此时视准轴不垂直于视距标尺,不能用式4-8计算距离和高差。如图4-8所示,下面介绍视准轴倾斜时求水平距离和高差的计算公式。 视线倾斜时竖直角为,上下视距丝在视距标尺上所截的位置为,,视距间隔为,求算、两点间的水平距离。 首先将视距间隔换算成相当于视线垂直时的视距间隔之距离,按式4-8求出倾斜视线的距离′,其次利用倾斜视线的距离′和竖直角计算为水平距离。因上下丝的夹角很小,则认为∠和∠为90°,设将视距尺旋转角,根据三角函数得视线倾斜时水平距离计算式为式(4-10),两点高差计算公式为式(4-11)。
如图8-5所示,如果我们把竖立在B 点上视距尺的尺间隔MN ,化算成与视线相垂直的尺间隔M ′N ′,就可用式(8-2)计算出倾斜距离L 。然后再根据L 和垂直角α,算出水平距离D 和高差h 。 从图8-5可知,在△EM ′M 和△EN ′N 中,由于φ角很小(约34′),可把∠EM ′M 和∠EN ′N 视为直角。而∠MEM ′=∠NEN ′=α,因此 ααααcos cos )(cos cos MN EN ME EN ME N E E M N M =+=+='+'='' 式中M ′N ′就是假设视距尺与视线相垂直的尺间隔l ′, 图8-5 视线倾斜时的视距测量原理
MN 是尺间隔l ,所以 αcos l l =' 将上式代入式(8-2),得倾斜距离L αcos Kl l K L ='= 因此,A 、B 两点间的水平距离为: αα2cos cos Kl L D == (8-4) 式(8-4)为视线倾斜时水平距离的计算公式。 由图8-5可以看出,A 、B 两点间的高差h 为: v i h h -+'= 式中 h ′——高差主值(也称初算高差)。 α ααα2sin 2 1 sin cos sin Kl Kl L h = ==' (8-5) 所以 v i Kl h -+=α2sin 2 1 (8-6) 式(8-6)为视线倾斜时高差的计算公式。
二、视距测量的施测与计算 1.视距测量的施测 (1)如图8-5所示,在A 点安置经纬仪,量取仪器高i ,在B 点竖立视距尺。 (2)盘左(或盘右)位置,转动照准部瞄准B 点视距尺,分别读取上、下、中三丝读数,并算出尺间隔l 。 (3)转动竖盘指标水准管微动螺旋,使竖盘指标水准管气泡居中,读取竖盘读数,并计算垂直角α。 (4)根据尺间隔l 、垂直角α、仪器高i 及中丝读数v ,计算水平距离D 和高差h 。 2.视距测量的计算 例8-1 以表8-1中的已知数据和测点1的观测数据为例,计算A 、1两点间的水平距离和1点的高程。 解 ()[]m 14.15784812cos m 574.1100cos 2 2 1 ='''?+??==αKl D A v i Kl h A -+=α2sin 2 1 1
单目视觉图像深度测量方法研究 相机与其它传感器相比,具有能够直观反映客观世界、数据量大、信息丰富等特点,而且通常价格较低、配置方便,是自动化装置和机器人感知环境传感器中的优先选择之一。但由于普通相机在拍摄时获得的是被拍摄场景投影到成像平面上的二维图像,丢失了场景的深度信息,这使得机器无法通过图像直接得到场景中物体的远近、大小和运动速度等信息,因此需要从二维图像中恢复深度信息,即深度测量。深度测量在工业自动化、智能机器人、目标检测和跟踪、智能交通、三维建模和3D视频制作等领域都有广泛的应用。深度测量方法有很多种,其中基于单目视觉的图像深度测量方法具有设备简单、成本低廉、操作方便等特点而成为研究热点,并且单目相机体积小,重量轻,在一些有空间大小或载荷限制的特定场合以及手眼系统等应用中,需要或只能使用基于单目视觉的图像深度测量方法,而目前该测量方法还很不成熟,有必要对其计算原理、技术方法等方面进行研究。 因此本文对基于单目视觉的图像深度测量方法开展研究,主要工作和创新点如下:(1)提出一种基于熵和加权Hu氏不变矩的目标物体绝对深度的测量方法。该方法用普通单目相机拍摄同一场景的两幅图像,拍摄时保持相机的参数不变,将相机沿光轴方向移动,分别在物距间隔为d的前后两处各拍摄一幅图像,然后采用LBF模型的方法分割出图像中的物体,并求出各个目标物体像的面积,再将物体像的熵的相对变化率和加权Hu氏不变矩结合起来实现图像内物体的自动匹配,最后运用本文推导的公式计算出各个目标物体的绝对深度。文中采用真实场景图像对该方法进行了实验验证并与其他方法进行了对比,结果表明了该方法的有效性。(2)提出一种基于SIFT特征的目标物体绝对深度的测量方法,该方法同样需要按照上面的方法获取同一场景的两幅图像,然后分别对这两幅图像进行图像分割和SIFT特征点提取,并进行图像中的目标物体匹配,接着用凸包和几何形状约束从匹配物体中选出一对最佳直线段,最后根据光学成像原理利用直线段长度计算出场景中静态目标物体的绝对深度信息。 由于是通过被测量物体上的两个SIFT特征点所成的直线段长度来计算出物体的绝对深度信息的,所以该方法鲁棒性较好,不受场景中被测量目标物体部分遮挡或缺失的限制,对比实验表明该方法测量精度高于现有其他方法。(3)提出一种基于梯度信息和小波分析的单幅图像相对深度测量方法。该方法首先利用图像
水准测量的方法及其实施 水准测量原理 水准测量的基本测法是:在图2-1中,已知A点的高程为H A,只要能测出A点至B点的高程之差,简称高差h AB。,则B点的高程 H B就可用下式计算求得: H B=H A+h AB (2-1) 差h AB。的原理如图2-1所示, 在A、B两点上竖立水准尺, 并在A、B两点之间安置— 图2-1 水准测量原理示意图架可以得到水平视线的仪器 即水准仪,设水准仪的水平视线截在尺上的位置分别为M、N,过A 点作一水平线与过B点的竖线相交于C。因为BC的高度就是A、B 两点之间的高差h AB。,所以由矩形MACH就可以得到计算h AB的式: h AB = a - b (2-2) 测量时,a、b的值是用水准仪瞄准水准尺时直接读取的读数值。 因为A点为已知高程的点,通常称为后视点,其读数a为后视读数,
而B点称为前视点,其读数b为前视读数。即 h AB = 后视读数-前视读数 视线高H i=H A+a (2-3)B点高程H B=H i-b (2-4)综上所述要测算地面上两点间的高差或点的高程,所依据的就是一条水平视线,如果视线不水平,上述公式不成立,测算将发生错误。因此,视线必须水平,是水准测量中要牢牢记住的操作要领。 水准仪和水准尺 一、微倾式水准仪的构造 如图2-2所示,微倾式水准仪主要由望远镜、水准器和基座组成。水准仪的望远镜能绕仪器竖轴在水平方向转动,为了能精确地提供水平视线,在仪器构造上安置了一个能使望远镜上下作微小运动的微倾螺旋,所以称微倾式水准仪。 1.望远镜 望远镜由物镜、目镜和十字丝三个主要部分组成,它的主要作用是能使我们看清远处的目标,并提供一条照准读数值用的视线。 十字丝是在玻璃片上刻线后,装在十字丝环上,用三个或四个可
水准仪测量高程的方法和步骤 2010-11-28 01:58:11| 分类:工程测量|举报|字号订阅 [教程]第二章水准测量 未知2009-12-13 16:21:06 网络 内容:理解水准测量的基本原理;掌握 DS3 型微倾式水准仪、自动安平水准仪的构造特点、水准尺和尺垫;掌握水准仪的使用及检校方法;掌握水准测量的外业实施(观测、记录和检核)及内业数据处理(高差闭合差的调整)方法;了解水准测量的注意事项、精密水准仪和电子水准仪的构造及操作方法。 重点:水准测量原理;水准测量的外业实施及内业数据处理。 难点:水准仪的检验与校正。 §2.1 高程测量( Height Measurement )的概念 测量地面上各点高程的工作 , 称为高程测量。高程测量根据所使用的仪器和施测方法的不同,分为: (1)水准测量 (leveling) (2)三角高程测量 (trigonometric leveling) (3)气压高程测量 (air pressure leveling) (4)GPS 测量 (GPS leveling) §2.2 水准测量原理 一、基本原理 水准测量的原理是利用水准仪提供的“水平视线”,测量两点间高差,从而由已知点高程推算出未知点高程。
a ——后视读数 A ——后视点 b ——前视读数 B ——前视点 1、A 、 B 两点间高差: 2、测得两点间高差后,若已知 A 点高程,则可得B点的高程: 。 3、视线高程: 4、转点 TP(turning point) 的概念:当地面上两点的距离较远,或两点的高差太大,放置一次仪器不能测定其高差时,就需增设若干个临时传递高程的立尺点,称为转点。 二、连续水准测量
水准测量基本原理(教案)
水准测量基本原理 课型:讲授 教学目的与要求: 了解高程测量常用的方法。 理解水准测量基本原理。 掌握高差法、仪高法及连续水准测量计算未知点高程的方法。教学重点、难点: 重点:水准测量基本原理。 高差法、仪高法及连续水准测量计算未知点高程的方法。 难点:水准测量基本原理。 采用教具: 多媒体课件 复习、提问 1、高程的定义、高差的定义。
第一讲 水准测量基本原理 一、高程测量(测定地面点高程)的方法 高程是确定地面点位置的要素之一,在工程建设的设计、施工与管理等阶段都具有十分重要的作用。测定地面点高程的工作称为高程测量。按所使用的仪器和施测方法分:水准测量、三角高程测量、气压高程测量和GPS 高程测量。 二、水准测量基本原理 水准测量不是直接测定地面点的高程,而是测出两点间的高差。即在两个点上分别竖立水准尺,利用水准测量的仪器提供一条水平视线,瞄准并在水准尺上读数,求得两点间的高差,从而由已知点高程推求未知点高程。 如图1-1所示,设已知A 点高程为A H ,用水准测量方法求未知点B 的高程B H 。在A 、B 两点中间安置水准仪,并在A 、B 两点上分别竖立水准尺,根据水准仪提供的水平视线在A 点水准尺上读数为a ,在B 点的水准尺上读数为b ,则A 、B 两点间的高差为:b a h AB -= 图1-1 水准测量原理
设水准测量是由A 点向B 点进行,如图1-1中箭头所示,则规定 A 点为后视点,其水准尺读数a 为后视读数; B 点为前视点,其水准 尺读数b 为前视读数。由此可见,两点之间的高差一定是“后视读数”减“前视读数”。如果a >b ,则高差AB h 为正,表示B 点比A 点高;如果 a < b ,则高差AB h 为负,表示B 点比A 点低。 在计算高差AB h 时,一定要注意AB h 的下标A B 的写法: AB h 表示A 点至B 点的高差,BA h 则表示B 点至A 点的高差,两个高差应该是绝对值相同而符号相反,即:BA AB h h =- 测得A 、B 两点间高差AB h 后,则未知点B的高程B H 为: )(b a H h H H A AB A B -+=+= (1-1) 水准测量:水平视线(水准仪)+水准尺→待定点与已知点高差+已知点高程→未知点高程。 三、推导以下几种计算未知点高程的公式: 1、高差法(由一点求另一点):直接利用高差计算未知点高程。 b a h AB -=(后视读数-前视读数);AB A B h H H += 2、视线高法(仪高法,由一点求多点):由仪器视线高程H i 计算未知点B 点高程。H A 为A 点的高程,a 为水准尺读数,b 为待求高程点水准尺读数。 ?? ? -=+=b H H a H H i B A i 注意事项: ①区别仅在与计算方法不同;
如图8-5所示,如果我们把竖立在B点上视距尺得尺间隔MN,化算成与视线相垂直得尺间隔M′N′,就可用式(8-2)计算出倾斜距离L。然后再根据L与垂直角α,算出水平距离D与高差h。 图8-5 视线倾斜时得视距测量原理 从图8-5可知,在△EM′M与△EN′N中,由于φ角很小(约34′),可把∠EM′M与∠EN′N视为直角。而∠MEM′
=∠NEN ′=α,因此 ααααcos cos )(cos cos MN EN ME EN ME N E E M N M =+=+='+'='' 式中M ′N ′就就是假设视距尺与视线相垂直得尺间隔l ′,MN 就是尺间隔l ,所以 αcos l l =' 将上式代入式(8-2),得倾斜距离L αcos Kl l K L ='= 因此,A 、B 两点间得水平距离为: αα2 cos cos Kl L D == (8-4) 式(8-4)为视线倾斜时水平距离得计算公式。 由图8-5可以瞧出,A 、B 两点间得高差h 为: v i h h -+'= 式中 h ′——高差主值(也称初算高差)。 α ααα2sin 21 sin cos sin Kl Kl L h ===' (8-5)
所以 1 =α2 sin + v h- i Kl 2 (8-6) 式(8-6)为视线倾斜时高差得计算公式。 二、视距测量得施测与计算 1.视距测量得施测 (1)如图8-5所示,在A点安置经纬仪,量取仪器高i,在B点竖立视距尺。 (2)盘左(或盘右)位置,转动照准部瞄准B点视距尺,分别读取上、下、中三丝读数,并算出尺间隔l。 (3)转动竖盘指标水准管微动螺旋,使竖盘指标水准管气泡居中,读取竖盘读数,并计算垂直角α。 (4)根据尺间隔l、垂直角α、仪器高i及中丝读数v,计算水平距离D与高差h。 2.视距测量得计算
水准测量的原理 、几种常见的水准测量方法 1.几何水准测量(简称水准测量) ; 2.三角高程测量; 3.气压高程测量(物理高程测量) 。 二、水准测量原理 水准测量 是利用水平视线来求得两点的高差。例如图 2-1中,为了求出 A 、B 两点的 高差 h AB ,在 A 、B 两个点上竖立带有分划的标尺—— 水准尺 ,在 A 、B 两点之间安置可提 供水平视线的仪器—— 水准仪 。当视线水平时,在 A 、B 两个点的标尺上分别读得读数 a 和 b ,则 A 、 B 两点的高差等于两个标尺读数之差。即: (2-1) 如果 A 为已知高程的点, B 为待求高程的点,则 B 点的高程为: H B H A h AB (高差法) 读数 a 是在已知高程点上的水准尺读数,称为“后视读数” 准尺读数,称为“前视读数” 。高差必须是后视读数减去前视读数。高差 hAB 的值可能是正, 也可能是负,正值表示待求点 B 高于已知点 A ,负值表示待求点 B 低于已知点 A 。此外, h BA 表示,其值为负。所以说明高差时必须 由图 2- 1可以看出, B 点高程还可以通过仪器的视线高程 H i 来计算,即 H i = H A + a (2- 3) H B = H i -b (仪高法) (2-4) 三、转点、测站 当两点相距较远或高差太大时,则可分段连续进行,从图 2-2 中可得: h 1 a 1 b 1 h 2 a 2 b 2 h n a n b n h AB h a b (2-2) ; b 是在待求高程点上 高差的正负号又与测量进行的方向有关,例如图 2-2中测量由 A 向 B 进行,高差用 h AB 表 (2-5) 示,其值为正;反之 由 B 向 A 进行,则高差用
如图8-5所示,如果我们把竖立在B点上视距尺的尺间隔MN,化算成与视线相垂直的尺间隔M′N′,就可用式(8-2)计算出倾斜距离L。然后再根据L和垂直角α,算出水平距离D和高差h。 图8-5 视线倾斜时的视距测量原理 从图8-5可知,在△EM′M和△EN′N中,由于φ角很小(约34′),可把∠EM′M和∠EN′N视为直角。
而∠MEM ′=∠NEN ′=α,因此 ααααcos cos )(cos cos MN EN ME EN ME N E E M N M =+=+='+'='' 式中M ′N ′就是假设视距尺与视线相垂直的尺间隔l ′,MN 是尺间隔l ,所以 αcos l l =' 将上式代入式(8-2),得倾斜距离L αcos Kl l K L ='= 因此,A 、B 两点间的水平距离为: αα2 cos cos Kl L D == (8-4) 式(8-4)为视线倾斜时水平距离的计算公式。 由图8-5可以看出,A 、B 两点间的高差h 为: v i h h -+'= 式中 h ′——高差主值(也称初算高差)。 α ααα2sin 21 sin cos sin Kl Kl L h ==='
(8-5) 所以 1 sin v i =α2 + h- Kl 2 (8-6) 式(8-6)为视线倾斜时高差的计算公式。 二、视距测量的施测与计算 1.视距测量的施测 (1)如图8-5所示,在A点安置经纬仪,量取仪器高i,在B点竖立视距尺。 (2)盘左(或盘右)位置,转动照准部瞄准B 点视距尺,分别读取上、下、中三丝读数,并算出尺间隔l。 (3)转动竖盘指标水准管微动螺旋,使竖盘指标水准管气泡居中,读取竖盘读数,并计算垂直角α。
经纬仪视距法测距 视距法测距所用的工具是经纬仪和视距尺。利用经纬仪望远镜中十字丝的上下两根短横丝,在视距尺上读得的上下两数之差以及其他一些数据,即可算出安置仪器点到立尺点的水平距离和高差。一、视距法测距原理 若在等腰三角形中有一条边和一个角为已知,就可以推算出另一条边长,这便是视距法测距的简单工作原理。 二、视距计算公式 (一)视准轴水平时的视距公式 如图,mn p =为视距丝间隔,MFN ∠为定角,F 为物镜前焦点,f 为焦距,s 为物镜离仪器中心的距离,'''N M t =为尺间隔,d ’为焦点到视距尺的距离,D ’为AB 之间的水平距离。 由图可以看出:MFN ?≌mFn ?,所以有: p f t d ='',即 ''t p f d ?= 因)(''s f d D ++=,故有 )(''s f t p f D ++?=。设 p f C =,s f Q +=,则上式改写为:Q t C D +?=''
C——视距乘常数。制造仪器时,一般将C设计为100。 Q——视距加常数。对于内调焦望远镜,其加常数接近于0,可忽略不计。 (二)视准轴倾斜时的视距公式 1、水平距离公式 若两点高差很大,则不可能用水平视线进行视距测量,必须把望远镜视准轴放在倾斜位置,如尺子仍竖直立着,则视准轴不与尺 面垂直,上面推导的公式就不 适用了。若要把视距尺与望远 镜视准轴垂直,那是办不到 的。因此在推导水平距离的公 式时,必须导入两项改正:(1) 对于视距尺不垂直于视准轴 的改正;(2)视线倾斜的改正。水平距离公式为: δ2 =D S其中:δ为竖角。 cos ? 2、高差公式 + ? =δ其中:i为仪器高,L为目标高。 h- i D L tg 三、视距法测距的作业方法 1、将经纬仪安置在测站上,对中、整平;
水准测量的基本原理及测量方法 内容:理解水准测量的基本原理;掌握DS3 型微倾式水准仪、自动安平水准仪的构造特点、水准尺和尺垫;掌握水准仪的使用及检校方法;掌握水准测量的外业实施(观测、记录和检核)及内业数据处理(高差闭合差的调整)方法;了解水准测量的注意事项、精密水准仪和电子水准仪的构造及操作方法。 重点:水准测量原理;水准测量的外业实施及内业数据处理。 难点:水准仪的检验与校正。 §2.1 高程测量(Height Measurement )的概念 测量地面上各点高程的工作, 称为高程测量。高程测量根据所使用的仪器和施测方法的不同,分为: (1)水准测量(leveling) (2)三角高程测量(trigonometric leveling) (3)气压高程测量(air pressure leveling) (4)GPS 测量(GPS leveling) §2.2 水准测量原理 一、基本原理 水准测量的原理是利用水准仪提供的“水平视线”,测量两点间高差,从而由已知点高程推算出未知点高程。
a ——后视读数A ——后视点 b ——前视读数B ——前视点 1、A 、 B 两点间高差: 2、测得两点间高差后,若已知A 点高程,则可得B点的高程: 。 3、视线高程: 4、转点TP(turning point) 的概念:当地面上两点的距离较远,或两点的高差太大,放置一次仪器不能测定其高差时,就需增设若干个临时传递高程的立尺点,称为转点。 二、连续水准测量
如图所示,在实际水准测量中,A 、 B 两点间高差较大或相距较远,安置一次水准仪不能测定两点之间的高差。此时有必要沿A 、 B 的水准路线增设若干个必要的临时立尺点,即转点(用作传递高程)。根据水准测量的原理依次连续地在两个立尺中间安置水准仪来测定相邻各点间高差,求和得到A 、 B 两点间的高差值,有: h 1 = a 1 - b 1 h 2 = a 2 - b 2 …… 则:h AB = h 1 + h 2 +…… + h n = Σ h = Σ a -Σ b 结论:A 、 B 两点间的高差等于后视读数之和减去前视读数之和。 § 2.3 水准仪和水准尺 一、水准仪(level) 如图所示,由望远镜、水准器和基座三部分组成。
第四章→第二节→视距测量 一、视距测量的概念 视距测量是根据几何光学原理,利用仪器望远镜筒内的视距丝在标尺上截取读数,应用三角公式计算两点距离,可同时测定地面上两点间水平距离和高差的测量方法。视距测量的优点是,操作方便、观测快捷,一般不受地形影响。其缺点是,测量视距和高差的精度较低,测距相对误差约为1/200~1/300。尽管视距测量的精度较低,但还是能满足测量地形图碎部点的要求,所以在测绘地形图时,常采用视距测量的方法测量距离和高差。 二、视距测量的计算公式 (一)望远镜视线水平时测量平距和高差的计算公式 如图4-7 所示,测地面两点的水平距离和高差,在点安置仪器,在点竖立视距尺,当望远镜视线水平时,水平视线与标尺垂直,中丝读数为,上下视距丝在视距尺上的位置读数之差称为视距间隔,用表示。 1、水平距离计算公式 设仪器中心到物镜中心的距离为,物镜焦距为,物镜焦点到 点的距离为,由图4-7可知两点间的水平距离为,根据图中相似三角形成比例的关系得两点间水平距离为:
(4-7) 式中:为视距乘常数,用表示,其值在设计中为100。 为视距加常数,仪器设计为0。 则视线水平时水平距离公式: (4-8) 式中—视距乘常数其值等于100。 —视距间隔。 2、高差的计算公式: 两点间的高差由仪器高和中丝读数求得,即: (4-9) 式中:—仪器高,地面点至仪器横轴中心的高度。 (二)望远镜视线倾斜时测量平距和高差的公式 在地面起伏比较大的地区进行视距测量时,需要望远镜倾斜才能照准视距标尺读取读数,此时视准轴不垂直于视距标尺,不能用式4-8计算距离和高差。如图4-8所示,下面介绍视准轴倾斜时求水平距离和高差的计算公式。 视线倾斜时竖直角为,上下视距丝在视距标尺上所截的位置为,,视距间隔为,求算、两点间的水平距离。 首先将视距间隔换算成相当于视线垂直时的视距间隔之距离,按式4-8求出倾斜视线的距离′,其次利用倾斜视线的距离′
水准测量的原理
水准测量的原理 一、几种常见的水准测量方法 1.几何水准测量(简称水准测量); 2.三角高程测量; 3.气压高程测量(物理高程测量)。 二、水准测量原理 水准测量是利用水平视线来求得两点的高差。例如图2-1中,为了求出 A 、 B 两点的高差AB h ,在A 、B 两个点上竖立带有分划的标尺——水准尺,在 A 、 B 两点之间安置可提供水平视线的仪器——水准仪。当视线水平时,在A 、B 两个点的标尺上分别读得读数a 和b ,则A 、B 两点的高差等于两个标尺读数之差。即: b a h AB -= (2-1) 如果A 为已知高程的点,B 为待求高程的点,则B 点的高程为: AB A B h H H += (高差法) (2-2) 读数a 是在已知高程点上的水准尺读数,称为“后视读数”;b 是在待求高程点上的水准尺读数,称为“前视读数”。高差必须是后视读数减去前视读数。高差AB h 的值可能是正,也可能是负,正值表示待求点B 高于已知点A ,负值表示待求点B 低于已知点A 。此外,高差的正负号又与测量进行的方向有关,例如图2-2中测量由A 向B 进行,高差用AB h 表示,其值为正;反之由B 向A 进行,则高差用BA h 表示,其值为负。所以说明高差时必须标明高差的正负号,同时要说明测量进行的方向。 图 2-1 由图2-1可以看出,B 点高程还可以通过仪器的视线高程H i 来计算,即 H i =H A +a (2-3) H B =H i -b (仪高法) (2-4) 三、转点、测站 当两点相距较远或高差太大时,则可分段连续进行,从图2-2中可得:
水准测量的原理和使用方法 确定地面点高程的测量工作,称为高程测量。高程测量又是测量三项基本工作之一。根据使用仪器和施测方法的不同,高程测量可分为水准测量、三角高程测量和气压高程测量。用水准仪测量高程,称为水准测量,它是高程测量中最常用、最精密的方法。 水准测量的原理: 水准测量是利用一条水平视线,并借助水准尺,来测定地面两点间的高差,这样就可由已知点的高程推算出未知点的高程。测定待测点高程的方法有高差法和仪高法两种。 1.高差法 如图2-1所示,若已知A 点的高程A H ,欲测定B 点的高程B H 。在A 、B 两点上竖立两根尺子,并在A 、B 两点之间安置一架可以得到水平视线的仪器。假设水准仪的水平视线在尺子上的位置读数分别为A 尺(后视)读数为a ,B 尺(前视)读数为b ,则A 、B 两点之间的高程差(简称高差AB h )为 b a h AB -= (2-1) 于是B 点的高程B H 为 AB A B h H H += (2-2) b a H h H H A AB A B -+=+= (2-3) 这种利用高差计算待测点高程的方法,称高差法。这种尺子称为水准尺,所用的仪器称为水准仪。 图2-1 水准测量原理
2.仪高法 由式2-3可以写为 b a H H A B -+=)( (2-4) 如图2-2所示,即 b H H i B -= 上式中i H 是仪器水平视线的高程,常称为仪器高程或视线高程。仪高法是,计算一次仪高,就可以测算出几个前视点的高程。即放置一次仪器,可以测出数个前视点的高程。 综上所述,高差法和仪高法都是利用水准仪提供的水平视线测定地面点高程。必须注意 ①前视与后视的概念一定要清楚,不能误解为往前看或往后看所得的水准尺读数。 ②两点间高差AB h 是有正负的,计算高程时,高差应连其符号一并运算。在书写AB h 时,注意h 的下标,AB h 是表示B 点相对于A 点的高差;BA h 则表示是A 点相对于B 点的高差。AB h 与BA h 的绝对值相等,但符号相反。 图2-2 仪高法水准测量