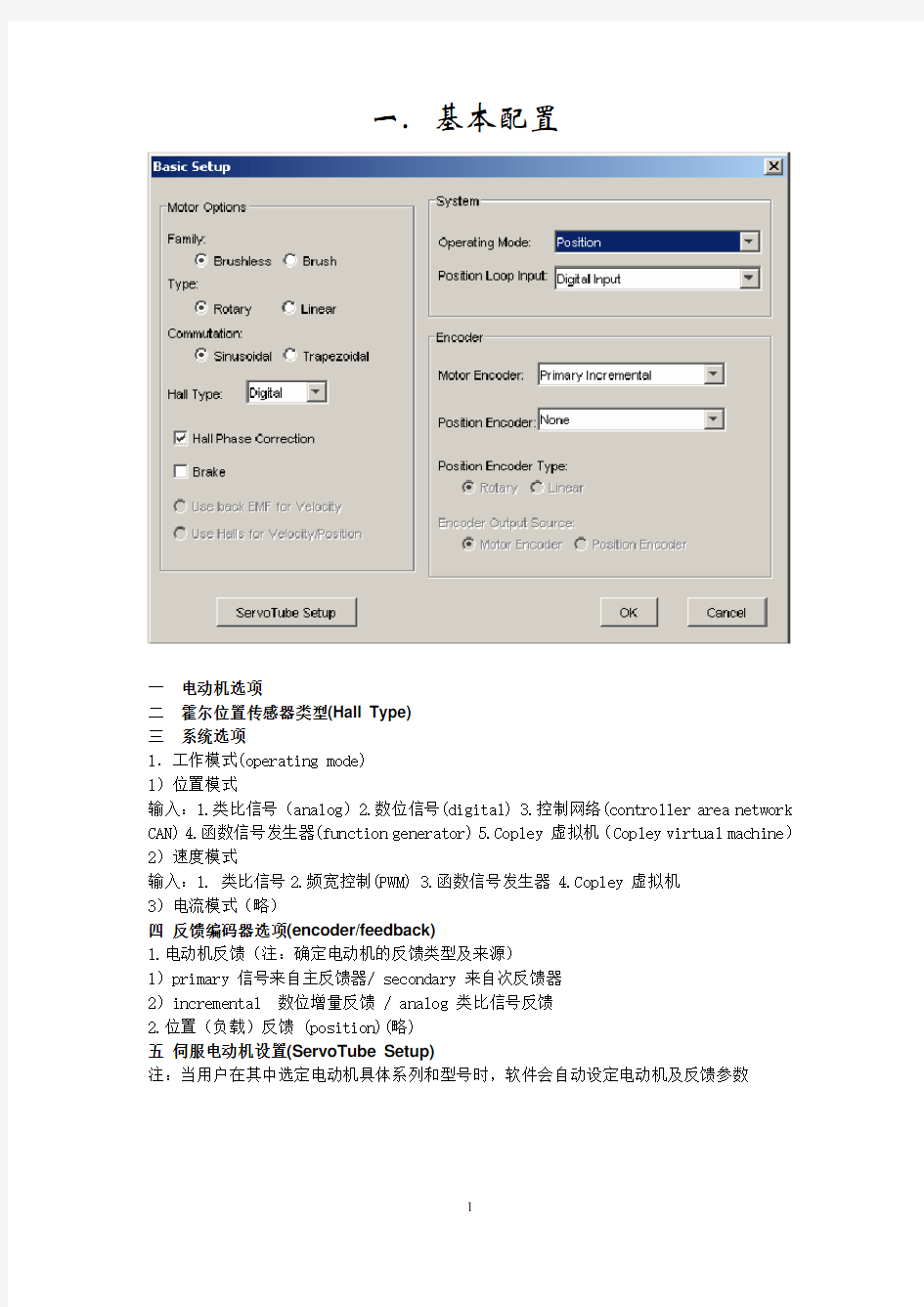

一. 基本配置
一电动机选项
二霍尔位置传感器类型(Hall Type)
三系统选项
1.工作模式(operating mode)
1)位置模式
输入:1.类比信号(analog)2.数位信号(digital) 3.控制网络(controller area network CAN) 4.函数信号发生器(function generator) 5.Copley 虚拟机(Copley virtual machine)2)速度模式
输入:1. 类比信号2.频宽控制(PWM) 3.函数信号发生器 4.Copley 虚拟机
3)电流模式(略)
四反馈编码器选项(encoder/feedback)
1.电动机反馈(注:确定电动机的反馈类型及来源)
1)primary 信号来自主反馈器/ secondary 来自次反馈器
2)incremental 数位增量反馈 / analog 类比信号反馈
2.位置(负载)反馈 (position)(略)
五伺服电动机设置(ServoTube Setup)
注:当用户在其中选定电动机具体系列和型号时,软件会自动设定电动机及反馈参数
二.具体配置
一电动机及反馈配置(Motor/Feedback)
1. 用户可直接载入现成的配置文件
2. 转动电动机参数
转动惯量(Motor Inertial),磁极数(Number of poles),最大转矩(Peak Torque),连续转矩(Continuous Torque), 速度限制(Velocity Limit),单位制(unit),转矩常数(Torque Constant),反电动势常数 (Back EMF Constant),电阻,电感
3. 线形电动机参数:
质量,最大推力,连续推力...
4. 反馈参数
依照技术说明书填写编码器参数
编码器精度(encoder resolution)
注:如果同时存在两个反馈器,必须确保电动机匝数和位置匝数之比等于电动机编码器匝数和位置编码器匝数之比 ???????????
5. 制动参数
制动流程:
制动指令(enable input)—〉电动机减速/计时开始,当速度降至事先设定的“制动激活速度”(Stop Activation Velocity)或时长超过“制动延迟时间”(the Brake/Stop Delay Time)—〉制动开始/发出制动信号/计时开始,当时长超过制动反应时间,所有输出端终止输出(设此延迟目的是为了在电动机电源切断前使其速度降至0)
注:在电流模式中,当伺服收到制动指令便立即停止输出(电流),同时发出制动信号。
6 增益计算程序(Calculate Function)
.
备注:
如果电流峰值,持续电流和速度限制有一个或多个不合适,需检查最大扭矩(或推力),持续扭矩(推力),速度限制,扭矩(推力)-电流常数是否正确
若电动机及反馈参数均正确,但相关限制参数仍不适合于该应用场合,请在调试过程中修改
三. 数字信号的输入与输出 一. 信号输入
1. Pull up +5 V:内部抬高该组输入端电压至5v
Pull down :内部降低该组输入端电压至0v
Debounce Time: “防抖动时长”(信号输入有效需持续之最短时长)2. 标准输入函数:
AMP Enable-LO(HI) Enables with clear faults (with reset )
低(高)信号输入启动伺服,低向高跳变(高向低跳变)信号消除锁死的错误和输出(重启)
NEG(POS) Limit-HI(LO) Inhibits
高(低)信号阻止逆向(正向)运动Reset on LO-HI Transition
低向高跳变重启
Motor Temp HI Disables
高信号产生过热错误提示
Home Switch Active HI
高信号产生复位提示
Motion Abort Active HI
高信号停止电动机运动,不停止伺服
3. 标准输入端口的分配
使能端(通常IN1),过热信号指示端(通常IN5)
二. 信号输出
1. 标准输出函数
Fault Active High 出现错误输出高信号
Brake-Active High 制动时输出高信号
2 . 用户设定函数
注:勾上锁定输出(latch Output)来锁定输出端
1. 用户事件
Amplifier Fault 伺服器错误Motor Brake Active 制动信号
Amp Over Temperature 伺服器过热PWM Outputs Disabled 频宽输出未启用
Motor Phasing Error 电动机相位(霍尔
传感器错误)Positive Software Limit
Negative Software Limit
限位错误
Feedback Error 位置反馈错误Following Error 跟随误差
Motor Over Temperature 电机动子过热Following Warning 跟随误差警告Under Voltage/Over Voltage 电压过低/过高Position has Wrapped 位置记录错误
Short Circuit 短路Velocity Limited 速度受限
Current / Voltage Limited 电流/电压过大Acceleration Limited 加速度受限
Amp Disabled by Hardware 使能端无信号Position Outside of Tracking
Window
跟随错误
Amp Disabled by Software 软件指令制动Velocity Outside of Tracking
Window
速度误差过大
Attempting to Stop Motor 预制动信号In Motion 电动机运动中,伺
服无信号
Phase not Initialized相位未初始化
2. 关于锁定(latch)
如果未锁定输出端被开始输出信号,一旦所选中的事件被清除,输出端停止输出信号
如果是一个锁定的输出端,只有在如下情况才会停止输出信号
a. 重启伺服
b. 复位被配置为“Enables with Clear Faults”或“Enables with Reset”的输入端口
c. 在CME2的控制面板里选择“清除错误”或“复位”
3. 用户输出函数的锁定状态与伺服器的错误锁定状态互不影响
四. 指令信号的输入
一. 模拟信号配置
1. 比例设定(scaling)
指当输入端输入为10v时,输出端的输出信号。增加精确度
2. 死区设定(dead band) 提高信号准确度
3. 反向指令
使输出端极性与输入端相反
4. 偏置(offset)
5. (位置模式下)
最大速度限制,最大加速度限制,最大减速加速度限制,自动减速加速度(Abort Decel)
二. 频宽调制信号配置
1. 两种工作模式
1)占空比50%(单线)
2)占空比100%(双线)
注: 两种模式中,伺服器都提供当占空比达0%或100%停止工作的监控功能,可确保安全
三. 位置模式下的数字信号配置
1. 输入信号控制
Pulse and Direction: 一信号作为动作指令,另一信号作为方向指令
Pulse Up / Pulse Down: 一信号作为正向动作指令,另一信号作为反向指令
Quadrature: 一信号作为速度指令,另一信号作为方向指令
Rising/ Falling Edge: 在信号上升/下降沿动作
Stepping Resolution:输入脉冲与输出脉冲的比值关系
五. 常见错误
1. 常见错误
Amplifier over temperature: 放大器过热
Motor phasing error:电动机相位角错误(霍尔传感器错误)
Feedback error: 位置反馈错误(反馈器供电端口电流过载,反馈器未连接或超出测量范围)Motor over temperature: 电动机动子过热开关切换至过热状态
Under voltage/over voltage: 电压不足/过载
Following error: 跟随错误
Short circuit detected: 电力线短路错误
Over current: I2T超时
注:关于跟踪窗口的说明
当误差超过跟踪窗口设定值时,输出端输出信号。直到误差信号在正负设定值之间维持一个“跟踪时长“,输出复位。
六. 电机角设定
一. 伺服放大器
1. 确保使能端未激活,加上电源
2. 把电动机向你希望的正向转动
3. 激活使能端,开始自动配置(start)
4. 开始测试
5. (非解码)霍尔传感器配置
5. (解码)解码器相位角配置
七. 控制环
一. 电流控制环的配置与调试
1. 配置
1) 参数
峰值相电流限制,I2T时间限制,连续相电流限制,电流环偏置
比例增益(Cp),积分增益(Ci)
2) 驱动输出
平整度最大化,速度最大化
3) 自动调试
2. 手动调试
原理:给电流环加一个方波激励,调节Ci和Cp来得到想要的波形
1) 选择示波(Scope)工具,选择电流信号(current)
2) 选中自动配置,配置如下
a.波形:方波
b.振幅:最大速度的10%(确保不超过电动机的限制)
c.频率:5Hz
d.通道一(绿):理论波形
e.通道二(白):实际波形
3) 调节Cp
a. 把Ci调为0
b. 调高或调低Cp得到适合的阶跃响应频率(通常在小电流波形情况下不超过100Hz)。
若Cp过大,可能产生自振;若过小,带宽会减小
4)调节Ci
直到获得想要的建立时间(settling time ***************************???)
3. 自动调试
1) 确保放大器使能端处于激活状态,选择自动调试(Auto Tuning)
2) 改变调试电流(Auto Tune Current), 开始调试
自动调节Cp,Ci
显示数据
3) 选择使用哪套数据
默认选择的中等(Medium)数据可满足大多数场合的应用
二. 关于电流环
1. 流程示意图
前端为限制平台(limiting stage) 平台接收电流指令,加上限制条件 (limits) ,把这个处理过的信号传给求和节点(summing junction) .求和节点把该电流信号减去实际电流(由反馈得到),产生一个误差信号。然后用Cp和Ci进行处理,产生一个命令,传到电源平台(power stage)
2. 限制条件
最大电流限制/持续电流限制:放大器能够产生的…
I2T时间限制:电动机能承受电流峰值的最大时长
电流模式之变化率(Ramp): 用以限制Jog模式的动作
3. 输出信号
电流环的输出信号确定了放大器输出频宽信号的占空比
三. 速度环的配置与调试
1. 配置
1)参数
速度限制(Vel limit),加速限制,减速限制,Vp , Vi , 制动加速度(Fast Stop Ramp)追踪参数(幅度,时长),增益比例(Enable Gains Scalar, 用以增加增益调节的精确度)?????????????????????????????????
输入端、输出端滤波器特性设定(Command Filter, 可根据用户需要进行编程设定)2. 手动调试
1) 选择示波(Scope)工具,选择速度信号(velocity)
2) 选中自动配置,配置如下
a.波形:方波
b.振幅:最大速度的10%(确保不超过电动机的限制)
c.频率:5Hz
d.通道一(绿):理论波形
e.通道二(白):实际波形
3) 调节Vp
a. 把Vi调为0
b. 调高或调低Vp得到适合的阶跃响应频率(通常在低速波形情况下不超过5Hz)。????4)调节Vi
直到获得想要的建立时间(settling time ***************************???)
四. 关于速度环
1. 流程示意图
限制平台接收速度指令,加上限制条件,把这个处理过的信号传给输入端滤波器,滤波器处理后传给求和节点。求和节点把该速度信号减去实际速度(速度环的反馈总是由电动机反馈器得到,即使负载上也安装了反馈编码器),产生一个误差信号。然后用Vp和Vi进行处理产生一个电流命令。可编程滤波器可加载在输入输出两个端口。
2. 相关参数
加速度、减速度限制:只用于速度模式,在位置模式中相关限制数据由轨迹发生器(Trajectory Generator)负责处理。
制动加速度: 只在速度模式且硬件制动时被使用。
限速关系示意图
3. 增益比例(Gain Scalar)?????
在调试未设比例的数值为64或更低的增益时,可以使用该功能。此类低增益可能会在精确度高于一微米的线性电动机的调试中被用到。
4. 可编程滤波器
输入端:减小速度指令的信号噪声;输出端:减小谐振激励的影响
5. 输出信号
电流信号,用作电流环的输入
五. 电流控制环的配置与调试
1. 配置
1)参数
加速度前馈(Acceleration Feed Forward , Aff),速度前馈(Velocity Feed Forward , Vff)?????????????????????????????????????
位置环比例增益(Pp), 增益倍数(Gains Multiplier),跟踪窗口设定(幅度,时间)
跟随错误设定(Following Fault): 错误(Fault , 同时停止环的运行);警告(Warning)
2. 手动调试
1) 选择示波(Scope)工具,选择分布图(Profiles)标签
2) 选中自动配置,配置如下
a.动作:相对
b.类型:Trap ???????????????????????????
c.距离:2000个计数单位
d.通道一(绿):速度分布图
e.通道二(白):跟随错误
3)选择开始(start), 此时分布图发生器执行一个短距运动(short move)
注意:1. 分布图??在这个短距运动中可能不会达到匀速运动状态
2. 如果产生跟随错误,打开控制面板(Control Panel),选择清除错误(Clear Faults)
3) 手动设定(在Trajectory Limits 和 Profile 标签中进行)
(略)
4) 调节Pp,以使跟随错误最小
a. 把 Vff 和 Aff 调为0
b. 在Profile标签页选择开始(start), 然后在增益标签页中调节Pp,以获得最好结果
c. 每调一次Pp,重新选择一次start, 以测试新的Pp
注意:1. 过大的Pp会导致振荡
2. 如果产生跟随错误,打开控制面板选择清除错误
5) 调节Vff(方法同上)
Vff 可以减少分布图中速度部分的跟随误差。
通常 Vff值为16384(100%)时最佳
6)调节Aff (方法同上)
Aff 可以减小加速和减速时的跟随误差
7) 请使用多套Profile参数来模拟在实际应用中执行的动作,重复步骤3
8)测试S-Curve的Profile(略)
备注:
1. 如果调试后发现电动机使能端有效但无法工作,同时发出低频噪音,可以调低速度环的
增益Vp和Vi;如果增益设得过低,对瞬时变化率的响应将会被削弱(例如,对干扰和瞬变信号的修正会变慢)
2. 如果伺服放大器工作在位置模式,输入信号为模拟信号,并且在电动机端经过调试后
仍有太多噪音信号,可以使用速度模式中的可编程滤波器来进一步消除噪声。
六. 关于位置环
1. 流程示意图
伺服放大器从数字或模拟信号输入端,控制局域网(CAN)接口或串行总线,或者从CVM控制程序中接收位置指令。当使用数字或模拟信号输入时,放大器的内部轨迹发生器根据轨迹限制参数计算出一个a trapezoidal motion profile。当使用控制局域网接口、串行总线或者CVM 控制程序时,可编程出一个trapezoidal或者S-curve profile。在接收位置指令的同时,轨迹发生器实时更新计算数据。发生器的输出端是一个已加上限制条件的瞬时位置指令。另外同时也产生瞬时的速度和加速度的profile信号。这些信号与实际位置反馈信号一起在位置环中被处理,产生一个速度指令。
在数字或模拟输入的位置模式下,可以通过把最大加速度设为0来绕过轨迹发生器。事实上,在此情况下唯一的限制条件就是在速度环中的速度限制和电流限制。(注意:最大加速度设为0可能会使伺服放大器在位置模式下无法正常工作)
2 相关参数
Vff : Profile中的速度会被乘以这个参数,用以减小匀速过程中的跟随误差
Aff: Profile中的加速度会被乘以这个参数,用以减小加减速过程中的跟随误差
3 关于反馈
在单反馈情况下:位置反馈信号来自电动机
在双反馈情况下:位置反馈信号来自电动机和负载
注意:在两种情况下,速度环的反馈信号都来自电动机
4 输出信号
速度信号,用作速度环的输入信号
八. 步进控制
1. CME2支持Copley的步进电动机系列
步进放大器可以工作在步进和伺服两种模式下
2. 位置限制设定(略)
3. 编码器修正设定
1) 编码器修正增益(Encoder Correction Gain,Ecp ) 可以补偿微步的损失
2) 补偿最大速度(Max Step Rate) :可以用Ecp补偿微步的最大速度(若超过该速度会导致更
大的微步损失)
4. 制动补偿增益(Detent Compensation Gain)
力矩制动会导致速度的波动,使用该增益可补偿
基于ARM32位单片机的机器人设计毕业论文 目录 摘要 (2) Abstract (3) 第一章引言 (4) 第二章S3C44B0X控制器介绍 (6) 2.1 S3C44B0X控制器管脚 (6) 2.2 Samsung S3C44B0X介绍 (8) 第三章ARM开发工具简介 (12) 3.1 ARM开发工具综述 (12) 3.2 ARM STD安装和应用 (13) 第四章S3C44B0X部资源编程 (20) 4.1 LED显示 (20) 4.2键盘控制 (23) 4.3 数码管显示 (24) 4.4 中断控制 (25) 第五章机器人的设计 (27) 5.1硬件结构 (27) 5.2软件设计 (31)
5.3结论 (44) 第六章展望 (45) 参考文献 第一章引言 ARM(Advanced RISC Machines)是微处理器行业的一家知名企业,设计了大量高性能、廉价、耗能低的RISC处理器、相关技术及软件。技术具有性能高、成本低和能耗省的特点。适用于多种领域,比如嵌入控制、消费、教育类、多媒体、DSP和移动式应用等。ARM将其技术授权给世界上许多著名的半导体、软件和OEM厂商,每个厂商得到的都是一套独一无二的ARM相关技术及服务。利用这种合伙关系,ARM很快成为许多全球性RISC标准的缔造者。 目前,总共有30家半导体公司与ARM签订了硬件技术使用许可协议,其中包括Intel、IBM、LG半导体、NEC、SONY、菲利浦和国民半导体这样的大公司。至于软件系统的合伙人,则包括微软、升阳和MRI等一系列知名公司。ARM架构是面向低预算市场设计的第一款RISC 微处理器。 ARM提供一系列核、体系扩展、微处理器和系统芯片方案。由于所有产品均采用一个通用的软件体系,所以相同的软件可在所有产品中运行(理论上如此)。典型的产品如下。 ①CPU核 --ARM7:小型、快速、低能耗、集成式RISC核,用于移动通信。 -- ARM7TDMI(Thumb):这是公司授权用户最多的一项产品,将ARM7指令集同Thumb扩展组合在一起,以减少存容量和系统成本。同时,它还利用嵌入式ICE调试技术来简化系统设计,并用一个DSP增强扩展来改进性能。该产品的典型用途是数字蜂窝和硬盘驱动器。 --ARM9TDMI:采用5阶段管道化ARM9核,同时配备Thumb扩展、调试和Harvard总线。在生产工艺相同的情况下,性能可达ARM7TDMI的两倍之多。常用于连网和顶置盒。 ②体系扩展 -- Thumb:以16位系统的成本,提供32位RISC性能,特别注意的是它所需的存容量非常小。 ③嵌入式ICE调试 由于集成了类似于ICE的CPU核调试技术,所以原型设计和系统芯片的调试得到了极大的简化。 ④微处理器 --ARM710系列,包括ARM710、ARM710T、ARM720T和ARM740T:低价、低能耗、封装式常规系统微型处理器,配有高速缓存(Cache)、存管理、写缓冲和JTAG。广泛应用于手持式计算、数据通信和消费类多媒体。 --ARM940T、920T系列:低价、低能耗、高性能系统微处理器,配有Cache、存管理和写缓冲。应用于高级引擎管理、保安系统、顶置盒、便携计算机和高档打印机。 --StrongARM:性能很高、同时满足常规应用需要的一种微处理器技术,与DEC联合研制,后来授权给Intel。SA110处理器、SA1100 PDA系统芯片和SA1500多媒体处理器芯片均采用了这一技术。 --ARM7500和ARM7500FE:高度集成的单芯片RISC计算机,基于一个缓存式ARM7 32位核,拥有存和I/O控制器、3个DMA通道、片上视频控制器和调色板以及立体声端口;ARM7500FE 则增加了一个浮点运算单元以及对EDO DRAM的支持。特别适合电视顶置盒和网络计算机(NC)。Windows CE的Pocket PC只支持ARMWindows CE可支持多种嵌入式处理器,但基于
v .. . .. 基于ARM的指纹识别系统设计 摘要 世界正朝着互联化的方向发展,而物联网正是这个数字革命的核心之一。在目前流行的物联网技术中,要求嵌入式终端能够提供成熟且价格便宜的生物特征识别技术,目前来说指纹识别的技术应用最为广泛,我们不仅在门禁、考勤系统中可以看到指纹识别技术的身影,市场上有了更多指纹识别的应用:如手机、指纹锁、银行支付验证都可应用指纹识别的技术。 在指纹识别控制领域,也会用到各种微控制器,本文采用了三星半导体S3C6410作为控制核心,S3C6410应用了专为要求高性能、低成本、低功耗的嵌入式消费类电子设计的ARM9内核。按性能分成两个不同的系列:该系列内核时钟频率已经达到72MHz。 指纹识别基于两种特征点来识别:(i)组成指纹的指纹整体特征结构(ii)局部的特征点。本文提出了一种可以在自动指纹识别系统中使用的基于特征点的指纹识别算法。本文提到的方法基于从细化提取的特征点,二值化一个指纹图像分割图。该系统采用在指纹分类的指纹索引匹配,大大提高了匹配算法的性能。 关键字:ARM9,指纹识别,特征识别,图像处理 . . . 资料. .
v .. . .. Abstract The world is moving in the direction of the development of the Internet, the Internet of is one of the core of the digital revolution. In the current network technology, the embedded terminal capable of providing biometric technology is mature and the price is cheap, at present technology of fingerprint recognition is the most widely, we can not only see the fingerprint recognition technology in access control, attendance system, fingerprint recognition application is more on the market: such as mobile phone, fingerprint lock, bank payment verification can be applied to fingerprint recognition technology. In the fingerprint recognition and control field, we will also use a variety of micro controller, this paper uses Samsung S3C6410 as the control core, S3C6410 application designed for high performance, low cost, low power embedded consumer electronic design based on ARM9 kernel. According to performance is divided into two different series: this series of core clock frequency has reached 72MHz. Fingerprint identification two feature points based on: (I) to identify the fingerprint feature structure fingerprint (II) feature local. This paper proposes a can be used in automatic fingerprint recognition system of fingerprint . . . 资料. .
本科毕业论文(设计)
摘要 射频识别(Radio Frequency Identification,RFID)是一种非接触式的自动识别技术,它通过射频信号自动识别目标对象并获取相关数据,识别过程无需人工干预,是一种新的自动识别技术[1]。RFID是利用射频的方式进行非接触的双向通信,而非接触式IC 射频卡成功地解决了无源(卡中无电源) 和免接触这一个难题。RFID具有非接触、长距离工作、适应环境能力强、可识别运动目标等优点,射频识别技术已经在越来越多的领域内出现,因此,对射频卡的开发应用也具有一定的现实意义。本文的设计是基于Philips公司的Mifare1 S50/S70芯片的射频识别系统的设计方案,制作一套以ARM微处理器为MCU的射频识别读写器系统,设计RF 接口电路,制作相应的硬件电路模块,分析非接触式IC 卡系统的通信协议,通过Keil C软件编程实现读写器与非接触式IC 卡系统的通信,并完成校园卡考勤系统。
关键词: RFID; 自动识别; ARM; 非接触式IC卡; Keil C Abstract RFID is a non-contact automatic identification technology,it identify target and get the related data through radio frequency signal automatically,the identification process without human intervention, is a kind of new automatic identification technology. RFID for non-contact two-way communication by the way of radio frequency, and non-contact IC radio frequency card has successfully solved the difficulty problems: without power supply and non-contact. RFID has many advantages: non-contact,long-distance work,good adaptability for environment and can recognize the moving objects,RFID technology has appeared in more and more field,so the development and application of radio frequency card also has certain practical significance. The design of this article is based on the Mifare 1 S50 / S70 chip radio frequency
毕业设计开题报告----基于ARM技术的WIFI无线网络技术 研究 毕业论文(设计)开题报告 学生姓名学号班级教师姓名职称系别毕设题目基于ARM技术的WIFI无线网络技术研究 1. 查找有关WiFi无线网络的书籍、文章,了解WiFi无线网络技术; 教师资 料2. 调研目前WiFi无线网络的覆盖、应用及发展情况; 布置情况 3. 在各大网站及数据库中查找有关基于ARM技术的WiFi技术研究 的材料; 4. 了解目前流行的WiFi技术应用,选择适合题目研究的技术应用。 1. 通过对相关资源的搜索,了解什么是WiFi,以及它目前的覆盖和应用状况; 学生自主 2. 查询了解WiFi技术、ARM技术的优缺点,以及相关的研究意义; 资料查询 3. 在数据库中查询到有关基于WiFi技术应用和基于ARM的无线网络应用的相关情况论文进行参考,通过论文、书籍的相关内容大概了解研究所需的技术方法; 4. 搜索最新的WiFi无线网络应用,以找到适合毕设研究的项目。 1.研究的意义 随着互联网越来越深入的走进人们的生活,用户对能够随时随地上网的需求越来越迫切,WiFi 无线通信技术也得到了迅速发展。 WiFi是一种可以将个人电脑、手持设备(如PDA、手机)等终端以无线方式 互相连接的技术,它可以帮助用户访问电子邮件、Web和流式媒体。它为用户提供
了无线的宽带互联网访问。同时,它也是在家里、办公室或在旅途中上网的快速、 便捷的途径。WiFi凭借它覆盖范围广、速度快、可靠性高、无需布线、健康安全及 计费便宜等特点已成为当今无线网络接入的主流标准。只要随身携带的电子设备集 成了 WiFi 无线通信终端用户就可以在 WiFi覆盖区域内随时拨打或接听电话、快 速浏览网页、下载或上传音视频文件、收发电子邮件,而无需担心花费太高和网速 太慢等问题。国内外许多地区都提供了WiFi 信号覆盖域,美国等发达国家是目前 WiFi 用户最多的地区,我国的许多大中城市的机场、车站、咖啡厅、酒店、图书开题综述馆等公共场也逐渐被 WiFi 信号所覆盖。 随着 WiFi 信号覆盖范围越来越广,WiFi无线通信技术在各种便携式产品上的应用也将变得越来越多。目前具有WiFi功能的手机也越来越普遍,人们对于基 于WiFi技术的应用的需求越来越大,随着技术的不断发展,各种电子产品都将提 供 WiFi无线接入功能。 ARM 是目前进行便携式电子产品开发的主流芯片,它具有如下特点: 1、体积小、低功耗、低成本、高性能;2、支持Thumb(16位)/ARM(32位)双指令集,能很好的兼容8位/16位器件;3、大量使用寄存器,指令执行速度更 快 ;4、
基于ARMCortexM3的双以太网口通信的实现 毕业论文 目录 前言 (1) 第一章相关技术背景介绍 (3) 1. 嵌入式系统的定义 (3) 2. 嵌入式处理器分类与现状 (4) 3. 嵌入式操作系统 (6) 4. 网络协议栈 (6) 5. 本章小结 (7) 第二章系统硬件平台 (8) 1. ARM Cortex-M3处理器 (8) 2. 系统任务要求 (9) 2.1 硬件方面 (9) 2.1 软件方面 (9) 3. 开发板MB9F618简介 (9) 3.2 开发板外观 (9) 3.2 配置说明 (10) 4. 本章小结 (11) 第三章软件的设计 (12) 1. 嵌入式操作系统的选择 (12) 1.1 RT-Thread操作系统的简介 (12) 1.2 虚拟文件系统 (13) 1.3 shell系统 (13) 1.4 图形用户界面 (13) 1.5 支持的平台 (13) 1.6 RT-Thread的核对象模型 (14) 1.7 核对象管理工作模式 (14)
1.8 线程状态 (15) 2. LwIP协议栈 (16) 2.1 LwIP协议栈简介 (16) 2.2 LwIP的以太网数据接收 (18) 3. LwIP协议栈的初始化 (21) 4. MB9F618网口设置 (22) 5. 主要函数功能的简介 (25) 6. 本章小结 (25) 第四章系统功能模块调试 (27) 1. 程序烧写 (27) 2. 程序烧写后 (27) 3. 双网卡测试 (27) 4. 网口的通信 (29) 5. 本章小结 (31) 结论 (32) 参考文献 (33) 致谢 (34)
目录 摘要 (2) Abstract (3) 第一章引言 (4) 第二章 S3C44B0X控制器介绍 (6) 2.1 S3C44B0X控制器管脚 (6) 2.2 Samsung S3C44B0X介绍 (8) 第三章 ARM开发工具简介 (12) 3.1 ARM开发工具综述 (12) 3.2 ARM STD安装和应用 (13) 第四章 S3C44B0X内部资源编程 (20) 4.1 LED显示 (20) 4.2键盘控制 (23) 4.3 数码管显示 (24) 4.4 中断控制 (25) 第五章机器人的设计 (27) 5.1硬件结构 (27) 5.2软件设计 (31) 5.3结论 (44) 第六章展望 (45) 参考文献
摘要 ARMT7TDMI是通用的32位RISC微处理器成员之一,在非常低的功耗和价格下提供了很高性能。 Samsung S3C44B0X微处理器是三星公司专为手持设备和一般应用提供的高性价比和高性能的微处理器解决方案。它使用ARM7TDMI核,工作在66MHZ。为了降低系统总成本,该芯片集成了8KB Cache、外部存储器控制器、LCD控制器等,是一款高效的微处理器。 关键词:ARMT7TDMI 32位微处理器 Samsung S3C44B0X 66MHZ
Abstract The ARM7TDMI is a member of the Advanced RISC Machines (ARM) family of general purpose 32-bit microprocessors, which offer very high performance for very low power consumption and price. SAMSUNG's S3C44B0X microprocessor is designed to provide a cost-effective and high performance micro-controller solution for hand-held devices and general applications. The S3C44B0X was developed using a ARM7TDMI core,up to 66MHZ。To reduce total system cost, S3C44B0X also provides the following: 8KB cache, optional internal SRAM, LCD controller and so on,which is a high performance microprocessors. Keywords: ARM7TDMI 32-bit microprocessors S3C44B0X 66MHZ
基于ARM32位单片机的机器人设计毕业设计
目录 摘要 (2) Abstract (3) 第一章引言 (4) 第二章 S3C44B0X控制器介绍 (6) 2.1 S3C44B0X控制器管脚 (6) 2.2 Samsung S3C44B0X介绍 (8) 第三章 ARM开发工具简介 (12) 3.1 ARM开发工具综述 (12) 3.2 ARM STD安装和应用 (13) 第四章 S3C44B0X内部资源编程 (20) 4.1 LED显示 (20) 4.2键盘控制 (23) 4.3 数码管显示 (24) 4.4 中断控制 (25) 第五章机器人的设计 (27) 5.1硬件结构 (27) 5.2软件设计 (31) 5.3结论 (44) 第六章展望 (45) 参考文献
摘要 ARMT7TDMI是通用的32位RISC微处理器成员之一,在非常低的功耗和价格下提供了很高性能。 Samsung S3C44B0X微处理器是三星公司专为手持设备和一般应用提供的高性价比和高性能的微处理器解决方案。它使用ARM7TDMI核,工作在66MHZ。为了降低系统总成本,该芯片集成了8KB Cache、外部存储器控制器、LCD控制器等,是一款高效的微处理器。 关键词:ARMT7TDMI 32位微处理器 Samsung S3C44B0X 66MHZ
Abstract The ARM7TDMI is a member of the Advanced RISC Machines (ARM) family of general purpose 32-bit microprocessors, which offer very high performance for very low power consumption and price. SAMSUNG's S3C44B0X microprocessor is designed to provide a cost-effective and high performance micro-controller solution for hand-held devices and general applications. The S3C44B0X was developed using a ARM7TDMI core,up to 66MHZ。To reduce total system cost, S3C44B0X also provides the following: 8KB cache, optional internal SRAM, LCD controller and so on,which is a high performance microprocessors. Keywords: ARM7TDMI 32-bit microprocessors S3C44B0X 66MHZ
学生毕业论文(设计)题目基于ARM的模数转换器的设计 姓名 XX 学号 XX 系部 XXXX系 专业 XXXXXXX技术 指导教师 XXXX 职称 XXXX(XXXX) XXXX年 1 月 XX 日 XXXXXXXXXXX教务处制
目录 摘要 (3) 关键词 (3) Abstract (3) Keywords (3) 1 绪论 (4) 1.1 技术背景 (4) 1.2 选题意义 (4) 2 A/D转换器基本原理 (4) 2.1 A/D转换器的基本原理 (4) 2.2 A/D转换器的基本功能 (5) 2.3 A/D转换模块 (5) 2.3.1 A/D转换模块概述 (5) 2.3.2 A/D转换的技术特性 (5) 2.3.3 A/D转换的功能寄存器框图 (5) 2.3.4 A/D转换初始化 (6) 2.3.5 A/D转换的操作 (6) 3 A/D转换器的设计 (7) 3.1 A/D转换器的工作原理 (7) 3.2 A/D转换电路 (8) 3.3 A/D转换器的原理图 (8) 4 A/D转换仿真结果 (9) 4.1 仿真设备 (9) 4.2 仿真设备简介 (9) 4.2.1 ADS1.2仿真软件 (9) 4.2.2 MagicARM2200 实验箱 (9) 4.3 仿真步骤 (12) 4.4 ADS1.2软件仿真 (12) 4.4.1 仿真软件 (12) 4.4.2 仿真硬件 (14) 4.5 仿真结果 (15) 结束语 (16) 致谢 (16) 参考文献 (16) 附录参考源程序 (16)
基于ARM的模数转换器的设计 XXXXXXX技术专业学生 XX 指导老师 XXXX 摘要:随着数字技术,特别是信息技术的飞速发展及普及,在现代控制通信及检测等领域,为了提高系统的性能指标,对信号的处理广泛采用了数字计算机技术。由于系统的实际对象往往都是一些模拟量(如温度、压力、位移、图像等),要使计算机或数字仪表能识别,处理这些信号,必须首先将这些模拟信号转换成数字信号;而经计算机分析,处理后输出的数字量也往往需要将其转换为相应模拟信号才能执行机构所接受。这样就需要一种能在模拟信号与数字信号之间起桥梁作用的电路——模数转换器。A/D转换器已成为信息系统中不可缺少的接口电路。为确保系统处理结果的精度,A/D转换器必须具有足够的转换精度,如果要实现快速变化信号的实时控制与检测,A/D转换器还要求具有较高的转换速度。转换精度与转换速度是衡量A/D的重要指标。随着集成技术的发展,现已研制和生产出许多单片和混合集成型的A/D转换器,它们具有愈来愈先进的技术指标。本文主要介绍了在ARM系统下,通过对A/D转换模块的设计。学习A/D接口原理及硬件电路,了解ARM的A/D 相关寄存器,利用外部模拟信号编程,实现ARM系统的A/D功能,掌握带有A/D的ARM编程实现A/D 功能的主要方法。 关键词:模数转换器;ADC模块;系统设计;仿真 ARM-based analog-to-digital converter design Student majoring in Computer-controlled technology professional XXX Ting Tutor XXX Abstract:The advent of digital technology, especially the rapid development of the information technology and the popularity of the field of modern control communication and detection, in order to improve system performance, signal processing widespread adoption of digital computer technology. Since the actual object of the system are often some analog quantity (such as temperature, pressure, displacement, image, etc.), make the computer or digital instrument can recognize, process these signals, you must first convert these analog signals into digital signals; while via computer analysis, the digital output after the processing is also often need to be converted to the corresponding analog signals in order to perform bodies accepted. Need a between the analog and digital signals from the bridge circuit - ADC .A / D converter the interface circuit has become indispensable in the information system. To ensure the accuracy of the system processing the results of the A / D converter must have a sufficient accuracy of the conversion, A / D converter is also required to have a higher conversion speed; if you want to achieve the real-time control and detection of rapidly changing signal. Conversion accuracy and conversion speed is an important indicator to measure the A / D. With the development of integration technology, has been developed and produced many monolithic and hybrid integration of A / D converter, they have more and more state-of-the-art technical indicators. This paper describes the ARM system, through the design of the A / D converter module. Learning A / D interface principle and the hardware circuit, ARM's A / D register, the use of external analog signals programmed to achieve a the ARM system of A / D function, master ARM programming with an A / D A / D function method. Keywords: analog-to-digital converter; ADC module; system design;simulation
毕业论文 题目基于ARM嵌入式系统的Socket通信设计
摘要 嵌入式系统是计算机技术、半导体技术和电子技术的综合体,已经广泛应用于科学研究、工程设计、国防军事、自动化控制等各个领域。随着网络通讯技术的迅猛发展,生产和生活中广泛要求嵌入式系统终端能够完成网络通讯功能。论文就是以ARM7 TDMI为嵌入式开发平台,开发具有网络通信功能的嵌入式终端。 SOCKET是一个通信链的句柄,通过套接字向网络发出请求或者应答网络请求,用于TCPIP协议的应用程序之间的相互通信。论文选择了ARM体系结构的嵌入式LPC2200处理器,根据系统的需求,在综合各种设计方案的基础上,选择移植带有TCPIP协议的ucLinux嵌入式操作系统。裁剪和定制系统后,构建相关的文件系统。在此基础上,编写应用程序,调用系统的Socket通信函数,实现服务器端和客户端的通信。描述IP地址和端口,用于在两个 论文成功的实现了嵌入式设备的网络接入功能,各个带有网络通讯功能的嵌入式终端可以相互通讯,扩大了和提高了嵌入式设备的应用范围,对嵌入式系统的发展有较大的意义。
关键词:嵌入式系统;ARM7TDMI;socket;TCPIP Abstract The embedded system is a complex system with the computer technology, semiconductor technology and electronic technology .It widely used in scientific research, engineering, national defense, automation and other fields. With the rapid development of network communication technology,our production and life requires the terminal to complete the network communication function in a wide range of embedded systems. The Paper select the ARM7 TDMI for embedded development platform, develop the embedded network communication terminal. Socket is a communication chain applications,. The paper select LPC2200 embedded ARM as processor architecture, with the system need, design the integration based on transplantation with TCP IP protocol ucLinux embedded operating system. The paper build related file system.after cutting and custom systems. On this basis, finished an application, and call the system function of Socket Communications, achieve server and client communication. The paper achieved the network access functions of the embedded device, the embedded with a network communication terminal can communicate with each other, and expand and improve
毕业设计开题报告(理工类) 设计题目基于ARM的ucLinux移植 学生姓名钟宏淼学号0812102096 专业计算机科学与技 术 一、课题的目的意义: 随着各种芯片技术的发展,各种嵌入式产品也如雨后春笋一般地出现了。目前,嵌入式产品应用领域涉及移动通信、汽车、医疗、家电等很多领域。而且,如今的嵌入式硬件的速度和容量越来越接近于PC,因此在这些嵌入式产品上运行操作系统就成为了可能。一直以来,很多企业花费了巨大成本研发了大量运行在PC上的软件产品。如果将这些优秀的软件应用在嵌入式系统中,将会成为快速开发嵌入式系统,降低嵌入式产品开发成本,提高软件稳定性和安全性的重要途径。Linux的出现正符合我们所有的要求,因为其源代码公开且免费,我们不仅可以保证操作系统中不存在任何黑洞和隐蔽的问题,而且无疑可以为企业节约一大笔开支,以最少的成本实现相同性能的产品。所以学习基于ARM 的ucLinux移植对于提高国产嵌入式产品的性能和降低生产成本具有重要作用。 要使Linux操作系统在嵌入式系统中运行起来,就必须把Linux移植到各种嵌入式处理器平台上,这样才能应用于实际的产品。ARM平台是目前性价比最高且应用最广泛的嵌入式处理器。在激烈的市场竞争的大背景下,ARM自然也是国内各企业所钟爱的一款处理器。三星公司的S3C2410开发板由于产品成熟、价格低廉、功能强大和资料齐全成为很多嵌入式公司和技术爱好者的首选。所以,Linux和ARM是企业构建嵌入式软硬件平台的一对强强组合,是提高嵌入式产品性能的最佳选择。 现在Linux操作系统已经占有绝对优势,很多嵌入式产品都在S3C2410开发板进行应用程序的开发,而要实现上层程序的运行,需要底层系统的支持,所以系统移植(包括Uboot移植、Linux内核移植和文件系统移植)具有重大的意义。系统移植不仅使底层移植成为可能,它还为应用层提供了强大的支持。它还可以根据应用层需要可以实现各种各样的功能的需要和设计产品的诸多设计限制进行内核裁剪,使之成为功能即专一又强大,同时具备再次开发能力的优良产品,具有重大的意义。 综上所述,研究基于ARM的Linux移植(uboot移植、Linux内核移植和文件系统移植),对于深入理解Linux操作系统和ARM框架结构,以及在此基础上各种应用软件的成功运行,对提高整个民族的嵌入式产品的竞争力,都具有非常积极和重大的作用和意义。同时对于技术爱好者如何快速学习系统移植更是一次很好的提升机会。
Linux环境下编译ARM上运行的Mplaye毕业设 计毕业论文 目录 摘要.................................................................... I Abstract................................................................. II 目录. (1) 第一章绪论 (1) 1.1选题背景 (1) 1.2 研究意义 (2) 1.3总体思路 (3) 1.4主要解决的问题 (4) 第二章硬件介绍 (5) 2.1 ARM处理器 (5) 2.1.1、ARM微处理器特点 (5) 2.1.2、ARM体系结构特点 (5) 2.1.3、Thumb的技术概述 (6) 2.2 TFT-LCD触摸屏 (6) 2.2.1、TFT-LCD模块介绍 (6) 2.2.2、TFT-LCD模块原理 (7) 2.3 2×3键盘简介 (11) 第三章软件介绍 (12) 3.1 开发板的环境搭建 (12) 3.2 Linux环境搭建 (12) 3.2.1、虚拟机的安装 (12) 3.2.2、VMware Tools安装及设置 (12) 3.2.3、Smb与nfs服务器的配置 (12) 3.2.4安装交叉编译器 (13) 第四章程序设计 (14) 4.1 设计要求 (14) 4.2 设计总体结构 (15) 4.2.1、对各层的简单描述 (15) 4.2.2、项目子模块设计思路分述 (16) 4.3 设计步骤 (17) 第五章软硬件测试 (20) 5.1 开发板性能测试 (20) 5.2 虚拟机可靠性测试 (20)
基于ARM的指纹识别系统设计 摘要 世界正朝着互联化的方向发展,而物联网正是这个数字革命的核心之一。在目前流行的物联网技术中,要求嵌入式终端能够提供成熟且价格便宜的生物特征识别技术,目前来说指纹识别的技术应用最为广泛,我们不仅在门禁、考勤系统中可以看到指纹识别技术的身影,市场上有了更多指纹识别的应用:如手机、指纹锁、银行支付验证都可应用指纹识别的技术。 在指纹识别控制领域,也会用到各种微控制器,本文采用了三星半导体S3C6410作为控制核心,S3C6410应用了专为要求高性能、低成本、低功耗的嵌入式消费类电子设计的ARM9内核。按性能分成两个不同的系列:该系列内核时钟频率已经达到72MHz。 指纹识别基于两种特征点来识别:(i)组成指纹的指纹整体特征结构(ii)局部的特征点。本文提出了一种可以在自动指纹识别系统中使用的基于特征点的指纹识别算法。本文提到的方法基于从细化提取的特征点,二值化一个指纹图像分割图。该系统采用在指纹分类的指纹索引匹配,大大提高了匹配算法的性能。 关键字:ARM9,指纹识别,特征识别,图像处理 1
Abstract The world is moving in the direction of the development of the Internet, the Internet of is one of the core of the digital revolution. In the current network technology, the embedded terminal capable of providing biometric technology is mature and the price is cheap, at present technology of fingerprint recognition is the most widely, we can not only see the fingerprint recognition technology in access control, attendance system, fingerprint recognition application is more on the market: such as mobile phone, fingerprint lock, bank payment verification can be applied to fingerprint recognition technology. In the fingerprint recognition and control field, we will also use a variety of micro controller, this paper uses Samsung S3C6410 as the control core, S3C6410 application designed for high performance, low cost, low power embedded consumer electronic design based on ARM9 kernel. According to performance is divided into two different series: this series of core clock frequency has reached 72MHz. Fingerprint identification two feature points based on: (I) to identify the fingerprint feature structure fingerprint (II) feature local. This paper proposes a can be used in automatic fingerprint recognition system of fingerprint recognition algorithm based on feature points. The methods mentioned in this article is based on the feature points extracted from refined, two value segmentation image of a fingerprint image. The system adopts fingerprint indexing in the fingerprint classification matching, greatly improves the performance of matching algorithm. Keywords: ARM9,Fingerprint Identifier,Feature Point,Image Processing. 2
基于ARM的音频播放器设计毕业论文 一、概述 音频播放一直是人们所钟爱的,琳琅满目的各种个样的MP3播放器随处可见,但其相应的驱动能力有限。本设计是采用S3C44B0X处理器的IIS音频接口和音频编码解码芯片UDA1341TS,并用DMA方式高效地来实现录音和播放声音时的数据传输。 二、音频播放器硬件设计 2.1 硬件体系结构设计 UDA1314TS和S3C44B0X通过IIS总线传输音频数据,控制数据通过UDA1314的L3接口传输,但S3C44B0X没有提供标准的L3接口,可以通过3个GPIO引脚模拟L3接口时序,实现与UDA1314TS的L3接口相联。UDA1314TS芯片集成了数字化音频和混频器功能,可以播放器数字化声音和录制声音(常把此类芯片称为CODEC编码译码器设备),它可以外接麦克风和扬声器。 由于音频数据传输量大,数据传输通常采用BDMA方式。放音系统的过程是:音频数据首先传输到部缓冲区,然后BDMA控制器将缓冲区的数据通过IIS总线传输给音频芯片。音频芯片经过解码及D/A转换给扬声器。 三星公司的BDMA控制器没有置的存储区域,在驱动程序中必须 2.2.1 IIS总线简介 S3C44B0X IIS(Intel –IC Sound,置集成电路音频总线)接口能用来连接一个外部8/16位立体声音CODEC。IIS总线接口对FIFO存取提供DMA传输模式代替中断模式,它可以同时发送数据和接收数据,也可以只发送数据。 1.特征 (1)支持IIS格式与MSB_justified格式,每个通道支持16fs,32fs和48fs的穿行位时钟频率。
(2) 每个通道可以支持8位或者16数据格式。 (3) 256fs 和384fs 主时钟 (4) 时钟和外部CODEC 时钟的可编程的频率分频器。 (5) 32字节的发送和接收FIFO (6) 支持正常传输模式和DMA 传输模式。 2. IIS 总线结构 ADDR IISDI DATA IISDO ONTL BRFC 包括总线接口、部寄存器、状态机、控制总线接口和FIFO 访问;3位的双向分频器包括一个作为IIS 总线的主设备时钟发生器,另一个作为外部时钟编码器的时钟发生器;16字节发送和接收FIFO 完成发送数据写入发送FIFO ,接收数据从接收FIFO 中读出功能;主设备串行比特时钟发生器(主设备模块)将从主设备时钟中分频得到串行比特数时钟;声道发生器和状态器生成和控制IISCLK 和IISLRCK ,并且控制数据的接收和发送;16位移位寄存器在发送数据时将数据由并变串,接收数据时将数据由串变并。 IISCLK IISLRC 发生器和声 道控制器 (CHN C ) 16字节发送FIFO 16字节接收FIFO IIS 主时钟发生器 总线接口 FIFO 控制 (BRFC ) 16 位移 位寄存器