机械原理计算题
公司标准化编码 [QQX96QT-XQQB89Q8-NQQJ6Q8-MQM9N]
五. 计算题 (每小题10 分, 共20分)
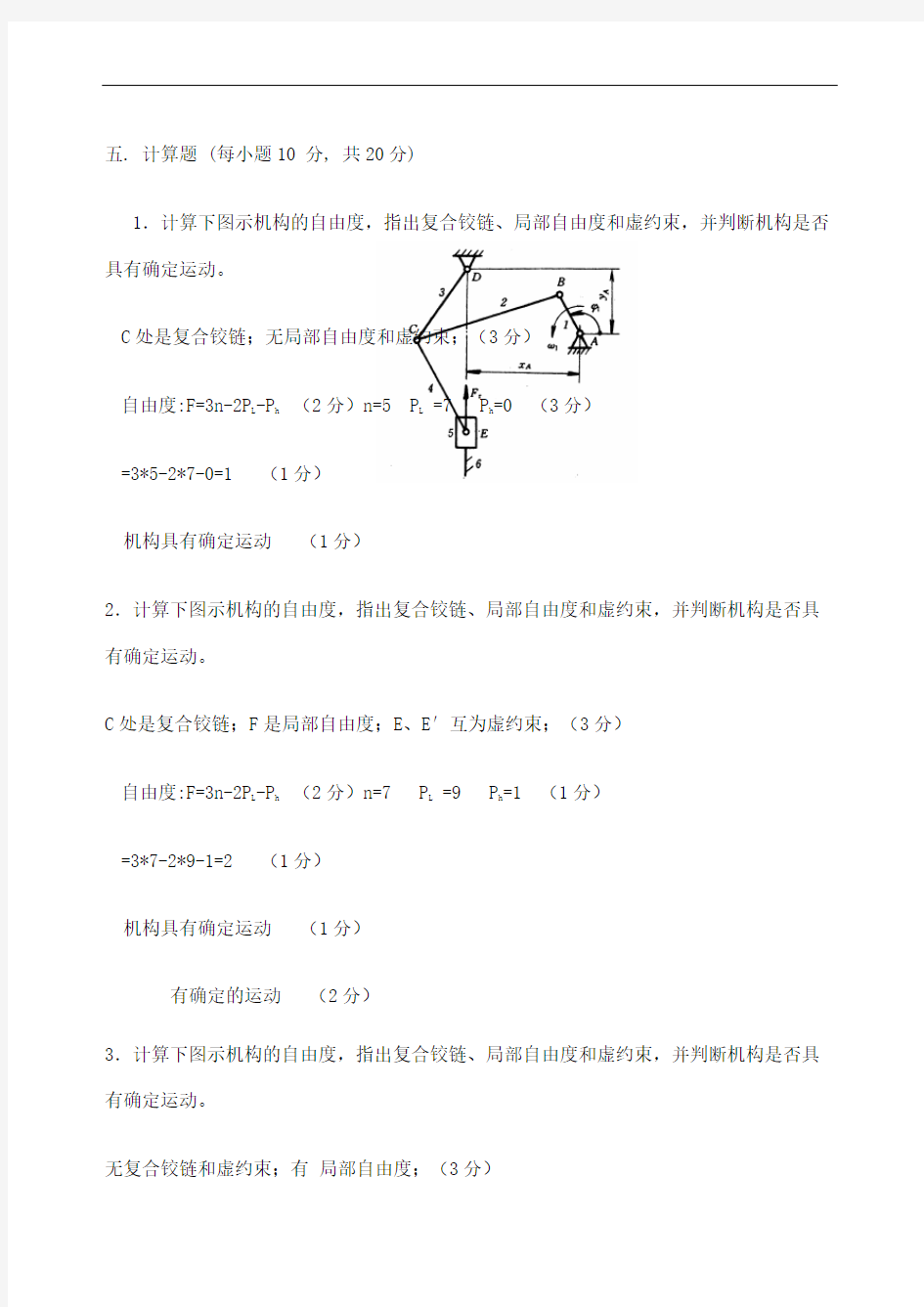
1.计算下图示机构的自由度,指出复合铰链、局部自由度和虚约束,并判断机构是否具有确定运动。
C处是复合铰链;无局部自由度和虚约束;(3分)
自由度:F=3n-2P
L -P
h
(2分)n=5 P
L
=7 P
h
=0 (3分)
=3*5-2*7-0=1 (1分)
机构具有确定运动(1分)
2.计算下图示机构的自由度,指出复合铰链、局部自由度和虚约束,并判断机构是否具有确定运动。
C处是复合铰链;F是局部自由度;E、E′互为虚约束;(3分)
自由度:F=3n-2P
L -P
h
(2分)n=7 P
L
=9 P
h
=1 (1分)
=3*7-2*9-1=2 (1分)
机构具有确定运动(1分)
有确定的运动(2分)
3.计算下图示机构的自由度,指出复合铰链、局部自由度和虚约束,并判断机构是否具有确定运动。
无复合铰链和虚约束;有局部自由度;(3分)
自由度:F=3n-2P
L -P
h
(2分)n=4 P
L
=4 P
h
=2 (3分)
=3*4-2*4-2=2 (1分)
有确定的运动(1分)
4.计算下图示机构的自由度,指出复合铰链、局部自由度和虚约束,并判断机构是否具有确定运动。
E处是复合铰链;无局部自由度和虚约束;(3分)
自由度:F=3n-2P
L -P
h
(2分)n=7 P
L
=10 P
h
=0 (3分)
=3*7-2*10=1 (1分)
机构具有确定运动(1分)
5.计算图示机构的自由度,指出复合铰链、局部自由度和虚约束,并判断机构是否具有确定运动。
机构有复合铰链、局部自由度、虚约束;(3分)
自由度:F=3n-2P
L -P
h
(2分)n=8 P
L
=11 P
h
=1 (3分)
F=3*8-2*11-1=1(1分)
机构具有确定运动(1分)
6.在图示的车床变速箱中,移动三联齿轮a 使齿轮3’和4’啮合。又移动双联齿轮b 使齿轮5’和6’啮合。已知各轮的齿数为48',50',42',38',58,42654321======z z z z z z ,电动机的转速m in /14451r n =,求带轮转速的大小和方向。
其运动方向与1相反
7.如图,已知 z 1=6, z 2=z 2, =25, z 3=57, z 4=56,求i 14
齿轮1-2-3组成一周转轮系,有:(n 1-n H )/(n 3-n H )= - z 3/z 1= - 57/6
齿轮1-2-2‘-4组成另一周转轮系,有:
(n 1-n H )/(n 4-n H )= - z 2z 4/z 1z ’2= - 56/6=-28/3
从图中得: n 3=0
联立求解得:i 14=n 1/n 4= - 588
8.轮系如下图: 已知:Z 1=30;Z 2=60;Z 2′=30;Z 4=90 ;求传动比i 1H 。
对于定轴轮系1-2有:1
2212112z z n n i -===
ωω(2分) 对于行星轮系2′-3-4有:3
2434242z z z z i H H
H ??-=--=
'''ωωωω(2分)
22'=ωω 04=ω(2分) 传动比H i 1=-8(4分)
9.一对渐开线外啮合标准齿轮圆柱齿轮机构。已知z 1=18,z 2=36,模数m =3,压力角α与
齿顶高系数*
a h 为标准值,试求:
1) 该圆柱齿轮机构的传动比i 12
2) 两轮的分度圆直径、齿顶圆直径、齿根圆直径
3) 求两轮的中心距
a) 该圆柱齿轮机构的传动比(2分)
b) 两轮的分度圆直径:(2分)
齿顶圆直径:(2分)
齿根圆直径:(2分)
c) 两轮中心距:(2分)
六. 分综合分析题 (本题10分)
1.请在图中画出一个死点位置、最小传动角的位置以及图示位置的压力角。
作图:AB 处于垂直位置时存在最小传动角。AB 1C 1为死点位置。压力角α如图。
2.试设计一铰链四杆机构。已知其摇杆CD 的长度mm l CD 75=,行程速度变化系数
5.1=K ,机架AD 的长度mm l AD 100=。?=451?是摇杆CD 的一个极限位置与机架AD 间较
小的一个夹角。试用图解法求曲柄的长度AB l 和连杆的长度BC l 。
解:
作图步骤:
a) 极位夹角?=+-??=+-??=
361
5.1)
15.1(1801)1(180K K θ
b) 作mm AD 100=
c) 作线段DC 1,并取线段DC 1=75mm ,使?=∠451DA C
d) 作线段AC 2,使?=∠3621AC C
e) 量得AC 1=70mm; AC 2=170mm
f) 曲柄和连杆的长度AB l 、BC l 为
3.设计一导杆机构,已知机架长度100mm ,行程速比系数K=。(要求保留作图轨迹,以及必要的文字说明。)
导杆机构的极位夹角?=+-??=+-??=
361
5.1)
15.1(1801)1(180K K θ
根据导杆机构的特性知:?θ=;其中?为导杆的摆角
作图步骤:
a) 作θ?==∠mDn
b) 作mDn ∠的角平分线,在该线上取mm d l DA 100==(即机架长度)
c) 过A 点作导杆任一极位的垂线AC 1(或AC 2),其即为曲柄,故
AC=mm d a 90.30)2/36sin(100)2/sin(=?==?
4.分析图示机构,求机构的全部瞬心和构件1、3的角速度比。
点为P
12
;
点为P
23
;
点为P
34
;
点为P
14
;
P
13
由三心定理求得,见图。
P
24
由三心定理求得,见图。
ω
1/ω
3
=P
13
P
34
/P
13
P
14
=4
绪论 一、研究对象 1、机械:机器和机构的总称 机器(三个特征):①人为的实物组合(不是天然形成的);②各运动单元具有确定的相对;③必须能作有用功,完成物流、信息的传递及能量的转换。 机器的组成:原动机、工作机、传动部分、自动控制工作机 机构:有①②两特征。 很显然,机器和机构最明显的区别是:机器能作有用功,而机构不能,机构仅能实现预 期的机械运动。两者之间也有联系,机器是由几个机构组成的系统,最简单的机器只有一个机构。 2、概念 构件:运动单元体 零件:制造单元体 构件可由一个或几个零件组成。 机架:机构中相对不动的构件 原动件:驱动力(或力矩)所作用的构件。T输入构件 从动件:随着原动构件的运动而运动的构件。T输出构件 机构:能实现预期的机械运动的各构件(包括机架)的基本组合体称为机构。 二、研究内容: 1、机构的结构和运动学: ①机械的组成;②机构运动的可能性和确定性;③分析运动规律。 2、机构和机器动力学:力一一运动的关系? F=ma 功一一能 3、要求:解决二类问题: 分析:结构分析,运动分析,动力分析综合(设计):①运动要求,②功能要求。新的机器。
第一章平面机构的结构分析(一)教学要求 1、了解课程的性质与内容,能根据实物绘制机构运动简图 2、熟练掌握机构自由度计算方法。了解机构组成原理 (二)教学的重点与难点 1、机构及运动副的概念、绘机构运动简图 2、自由度计算,虚约束,高副低代 (三)教学内容 § 1-1机构结构分析的目的和方法研究机构的组成原理和机构运动的可能性以及运动确定的条件 § 1-2机构的组成 机构是由构件组成的。 、运动副: 定的相对运动)构件间的可动联接。(既保持直接接触,又能产生高副: 点线接触 低副:面接触 运动副元素 自由度:构件含有独立运动的数目约束:对独立运动的限 制 低副:2个约束,1个自由度 高副:1个约束,2个自由度低副: ①转动副:两个构件间不能作旋转运动的运动副; ②移动副:两个构件间不能作移动运动的运动副。高 副:①齿轮副;②凸轮副。
兰州2017年7月4日于家属院复习资料 第2章平面机构的结构分析 1.组成机构的要素是和;构件是机构中的单元体。 2.具有、、等三个特征的构件组合体称为机器。 3.从机构结构观点来看,任何机构是由三部分组成。 4.运动副元素是指。 5.构件的自由度是指;机构的自由度是指。 6.两构件之间以线接触所组成的平面运动副,称为副,它产生个约束,而保留个自由度。 7.机构具有确定的相对运动条件是原动件数机构的自由度。 8.在平面机构中若引入一个高副将引入______个约束,而引入一个低副将引入_____个约束,构件数、约束数与机构自由度的关系是。 9.平面运动副的最大约束数为,最小约束数为。 10.当两构件构成运动副后,仍需保证能产生一定的相对运动,故在平面机构中,每个运动副引入的约束至多为,至少为。 11.计算机机构自由度的目的是______。 12.在平面机构中,具有两个约束的运动副是副,具有一个约束的运动副是副。 13.计算平面机构自由度的公式为F= ,应用此公式时应注意判断:(A) 铰链,(B) 自由度,(C) 约束。 14.机构中的复合铰链是指;局部自由度是指;虚约束是指。 15.划分机构的杆组时应先按的杆组级别考虑,机构的级别按杆组中的级别确定。 16.图示为一机构的初拟设计方案。试: (1〕计算其自由度,分析其设计是否合理?如有复合铰链,局部自由度和虚约束需说明。 (2)如此初拟方案不合理,请修改并用简图表示。 题16图题17图 17.在图示机构中,若以构件1为主动件,试: (1)计算自由度,说明是否有确定运动。
(2)如要使构件6有确定运动,并作连续转动,则可如何修改?说明修改的要点,并用简图表示。18.计算图示机构的自由度,将高副用低副代替,并选择原动件。 19.试画出图示机构的运动简图,并计算其自由度。对图示机构作出仅含低副的替代机 构,进行结构分析并确定机构的级别。 题19图 题20图 20.画出图示机构的运动简图。 21. 画出图示机构简图,并计算该机构的自由 度。构件3为在机器的导轨中作滑移的整体构件,构件2在构件3的导轨中滑移,圆盘1的固定轴位于偏心处。 题21图 题22图 22.对图示机构进行高副低代,并作结构分析,确定机构级别。点21,P P 为在图示位置时,凸轮廓线在接触点处的曲率中心。 第3章 平面机构的运动分析 1.图示机构中尺寸已知(μL =mm ,机构1沿构件4作纯滚动,其上S 点的速度为v S (μV =S/mm)。 (1)在图上作出所有瞬心; (2)用瞬心法求出K 点的速度v K 。
机械效率计算题 1.用图6所示的滑轮组提升重物,已知物体重为200N, 人用125N的拉力向下拉动绳子,5s内可使物体匀速上 升2m求: (1)拉力所做的功和拉力的功率; (2)滑轮组的机械效率. 答案:(1)W=500J P=100W (2)80% 2.如图所示为一款塔式起重机,工作电压为380伏。当起重机吊起500千克重物以1米/秒速度匀速上升20米时,工作电流是18安;当起重臂水平旋转,带动重物在8秒内移动16米时,工作电流是5安。 (1)如果起重臂加长,那么平衡块质量应该________(填“增加”或“减小”)。 (2)请计算在整个过程中,起重机钢绳 对重物所做的功和起重机将电能转化成 机械能的效率(保留小数到%)。 答案:增加;1×105J;% 3.如图所示,工人用滑轮组提升重240N的物体,所用的拉力为150N,
物体在5s内匀速上升lm.求: (1)有用功; (2)滑轮组的机械效率; (3)拉力的功率. 答案:240J;80%;60W 4.随着社会的发展,人们生活水平的提高,人们的住房条件也得到了很大的改善.小明家最近购置了一套新房,为了帮助爸爸将重600N 的装修材料运送到6m高的楼上,小明利用物理课上学过的滑轮组,设计了如图20甲所示的材料搬运方案(其中每个滑轮重30N,绳子足够长,所能承受的最大拉力为250N,不计绳重及摩擦). (1)计算说明绳子的拉力是否超过绳子的最大承受力 (2)小明爸爸观察了该装置后,他想如果将该装置的滑轮位置颠倒(图20乙)是否会更省力一些,请你按照小明爸爸的想法,用笔画线在乙图绕上绳子并说明小明爸爸的想法是否正确. (3)求两种方案的机械效率之比 (4)综合分析评估两个方案,你认为哪个方案更好一些说明理由.
1.如图所示传动系统,试计算: 1)轴A的转速(r/min); 2)轴A转1转时,轴B转过的转数; 3)轴B转1转时,螺母C移动的距离。 解: 1)轴A的转速: n A=1440×5/22×23/23×20/20×20/80=81.8(r/min) 2)轴A转1转时,轴B转过的转数: n B=1440×5/22×35/30×30/50×24/40×1/84=1.7(r/min)则轴B在轴A转1转时转过的转数为:N=81.8/1.7=48(r) 3)轴B转1转时,螺母C移动的距离为: Lc=1440×5/22×35/30×30/50×2/20×10×1/84=4.77(mm)
2.某传动系统如图所示要求: (1)写出此传动路线的表达式并说明有多少种转速; (2)计算主轴极限转速n max和n min。 解: (1)主运动的传动路线表达式:ⅠⅡⅢⅣⅤⅥ 27/43 39/39 电动机Ⅰ—27/49—Ⅱ— 35/35 —Ⅲ—26/52—24/54—Ⅳ—50/28—Ⅴ—30/67—Ⅵ(主轴) 31/39 (2)n max=1440×27/49×35/35×39/39×50/28×30/67=634.4(r/min) N min=1440×27/49×27/43×26/52×24/54×30/67=49.6(r/min)
3.按图所示传动系统作下列各题: 1、写出传动路线表达式; 2、分析主轴的转速级数; 3、计算主轴的最高最低转速。 (注:图中M1为齿轮式离合器) 解: 对于a): 传动路线表达式: 电动机—Ⅰ—Ⅱ—Ⅲ—Ⅳ—Ⅴ—Ⅵ(主轴) 主轴的转速级数:3×3×2=18级 =1430×90/150×36/22×42/26×178/200×27/63=865.08r/min 主轴的最高转速:n max 主轴的最低转速:n =1430×90/150×17/42×22/45×178/200×27/63× min 17/58=18.98r/min 对于b): 传动路线表达式: 电动机—Ⅰ—Ⅱ—Ⅲ(主轴) 主轴的转速级数:3×4=12级 =1440×100/325×40/58×61/37=503.8r/min 主轴的最高转速:n max 主轴的最低转速:n =1440×100/325×26/72×37/61×37/61×17/81=12.35r/min min
题1 一、填空题(10分) 1.在平面机构中,一个运动副引入的约束m 的变化范围是。 在空间机构中,一个运动副引入的约束数m的变化范围是。2.某机器的主轴平均角速度ωm= 100rad/s, 机器运转的速度不均匀系数δ= 0.05,则该机器的最大角速度ωmax = ,最小角速度ω = 。 min 3.六杆机构有个瞬心。 4.平衡技术中常把远低于机器的一阶固有频率的转子称为。常把接近或超过机器的一阶固有频率的转子称为。 5.齿条型刀具范成切齿时,齿轮的模数由决定。 6.相对瞬心的特点是,绝对瞬心的特点是。 二、选择题(10分) 1.下面说法正确的是:() A.机构的死点与自锁是一回事;B.机构处于死点α=0;C.机构处于死点γ=0;D.机构的死点与摩擦力有关。2.下面说法正确的是:() A.齿条型刀具范成切齿时,分度圆的半径由齿条模数决定; B.齿条型刀具范成切齿时,齿轮的模数由齿条移动速度和轮坯转动角速度的比值决定; C.齿条型刀具范成切齿时,齿轮是不是标准齿轮由加工终了时齿条与轮坯的相对位置决定;
D.齿轮传动中正传动与齿轮正变位是一回事,只是提法不同 3.下面说法正确的是() A.虚约束不是实实在在的约束,是没用的,所以等于不存在;B.虚约束是不存在的约束; C.计算机构的自由度时可以去掉虚约束,在实际机构中也可以拆除它; D.虚约束满足一定的条件,若不满足条件它将会变成实际约束。4.下面说法正确的是() A.矩形螺纹多用于连接;B.三角螺纹多用于连接; C.三角螺纹多用于传动;C.矩形螺纹、三角螺纹均多用于传动。 5.下列关于单万向联轴节叙述正确的是:() A.不可能等于1 ;B.可能等于1; C.可以传递成任意角度两轴的运动;D.不可以传递成任意角度两轴的运动。 三、判断题(5分) 1.运动链选择不同构件作机架,机构的级别不变。() 2.齿轮与齿条啮合传动分度面与节圆可能不重合。() 3.齿轮传动中ε=1.3,说明在齿轮转过一个基圆齿距时30% 的时间2对齿啮合。() 4.只要满足机构的自由度=机构的主动件数,机构就一定有有意义的确定的运动。()
五. 计算题 (每小题10 分, 共20分) 1.计算下图示机构的自由度,指出复合铰链、局部自由度和虚约束,并判断机构是否具有确定运动。 C处是复合铰链;无局部自由度和虚约束;(3分) 自由度:F=3n-2P L-P h (2分)n=5 P L =7 P h=0 (3分) =3*5-2*7-0=1 (1分) 机构具有确定运动(1分) 2.计算下图示机构的自由度,指出复合铰链、局部自由度和虚约束,并判断机构是否具有确定运动。 C处是复合铰链;F是局部自由度;E、E′互为虚约束;(3分) 自由度:F=3n-2P L-P h (2分)n=7 P L =9 P h=1 (1分) =3*7-2*9-1=2 (1分) 机构具有确定运动(1分) 有确定的运动(2分) 3.计算下图示机构的自由度,指出复合铰链、局部自由度和虚约束,并判断机构是否具有确定运动。
无复合铰链和虚约束;有局部自由度;(3分) 自由度:F=3n-2P L-P h (2分)n=4 P L =4 P h=2 (3分) =3*4-2*4-2=2 (1分) 有确定的运动(1分) 4.计算下图示机构的自由度,指出复合铰链、局部自由度和虚约束,并判断机构是否具有 确定运动。 E处是复合铰链;无局部自由度和虚约束;(3分) 自由度:F=3n-2P L-P h (2分)n=7 P L =10 P h=0 (3分) =3*7-2*10=1 (1分) 机构具有确定运动(1分) 5.计算图示机构的自由度,指出复合铰链、局部自由度和虚约束,并判断机构是否具有确 定运动。
机构有复合铰链、局部自由度、虚约束;(3分) 自由度:F=3n-2P L -P h (2分)n=8 P L =11 P h =1 (3分) F=3*8-2*11-1=1(1分) 机构具有确定运动 (1分) 6.在图示的车床变速箱中,移动三联齿轮a 使齿轮3’和4’啮合。又移动双联齿轮b 使齿轮5’和6’啮合。已知各轮的齿数为48',50',42',38',58,42654321======z z z z z z ,电 动机的转速min /14451r n =,求带轮转速的大小和方向。 47.150 384248 4258''''53164261'16-≈????-='-== z z z z z z n n i min /98347 .11445 ''1616r i n n -≈-== 其运动方向与1相反
中考物理机械效率汇编 1.用图6所示的滑轮组提升重物,已知物体重为200N ,人用125N 的拉力向下拉动绳子,5s 内可使物体匀速上升2m 求: (1)拉力所做的功和拉力的功率; (2)滑轮组的机械效率. 2.如图所示为一起重机,工作电压为380伏。当起重机吊起500千克重物以1米/秒速度匀速上升20米时,工作电流是18安;当起重臂水平旋转,带动重物在8秒内移动16米时,工作电流是5安。 (1) 如果起重臂加长,那么平衡块质量应该________(填“增加”或“减小”)。 (2) (2)请计算在整个过程中,起重机钢绳对重物所做的功和起重机将电能转化成机械能的效率(保留小数到0.1%)。 3.如图所示,工人用滑轮组提升重240N 的物体,所用的拉力为150N , 物体在5s 内匀速上升lm .求: (1)有用功; (2)滑轮组的机械效率; (3)拉力的功率. 5. 如图22所示装置 ,绳重及摩擦不计。装卸工人将重为800N 的货物提至高处,人对绳的拉力F 1为500N ,货物在1min 内匀速上升了5m 。 (1)请在图上画出绳子的绕法;(2)求滑轮组的机械效率;(3)如果重物是600N ,要把重物提升5m ,求拉力做的功。 6.工人用如图所示的滑轮组提升重物,在10s 内将240N 的物体匀速提升2m ,已知工人的拉力为100N 不计绳重与摩擦阻力,求:(1)工人做功的功率;(2)滑轮组的机械效率;(3)如果用此滑轮组匀速提升300N 的重物,拉力应为多大? 图22
7、 我省出现了百年不遇的特大旱灾,某校为保障师生的生活用水,紧急调来一台功率为15kw 的抽水机, 把水抽到距水面10m 高的蓄水池中,抽水机30分钟刚好将容积为18m 3的蓄水池抽满,求:(1)抽水机对水做的功;(2)抽水机的效率;(3)同学们,水是生命之源,请你写出日常生活中的两项节水措施。 8. 在场馆和楼房建设工地上,“塔吊”是常见的一种起重设备,如图19所示是“塔吊”的示意图.假设某塔吊配置的电动机铭牌上标有:额定电压380V , 额定功率38kW ,线圈电阻0.4Ω.在一次吊起重物时,电动机正常工作20s ,把重物吊起20m .求: (1)该电动机在这次吊起重物的过程中消耗的电能.(2)电动机工作过程中,线圈产生的热量.(3)在该起重设备中,如果这次吊起重物的机械效率为80%,则被吊重物的质量为多少t ? 9. 为了给蓄水塔抽水,新买了一单相螺杆自吸泵,其铭牌上的部分参数如下表:(吸程是指水泵到水面的 距离;扬程是指水能被抽到的最高点到水面的距离) (1)该铭牌中有一个参数是明显错误的,请你指出来,并通过计算加以说明. (2)该水泵连续正常抽水1h ,把水抽高了50m ,水泵对水做了多少功?此 时水泵的效率是多少? (g 取10N/kg) 10.如图所示,小明同学用动滑轮提升900N 的木箱,木箱以0.5m /s 的速度匀速上升2m ,所用拉力F 的大小为500N(不计绳重和摩擦). (1)拉力F 做功的功率是多少?(2)动滑轮的机械效率是多少? 11.滑轮组在建筑中应用广泛,如图15所示为建筑工人自制的滑轮组。某工人用此滑轮组将质量为90kg 的重物提高5m ,所用的拉力是600N 。求: (1)该重物受到的重力; (2)工人通过滑轮组所做的有用功; (3)工人做的总功; (4)滑轮组的机械效率。 12.如图所示,工人师傅用一个定滑轮和动滑轮组成滑轮组,把重为500N 的箱 子匀速提升5m ,动滑轮的质量为8kg ,不计绳重和摩擦,取g=10N/kg . 图15 题24图
一、单项选择题 1. 两构件组成运动副必须具备的条件是两构件( )。 A. 相对转动或相对移动 B. 都是运动副 C. 相对运动恒定不变 D .直接接触且保持一定的相对运动 2. 高副低代的条件是( )。 A. 自由度数不变 B. 约束数目不变 C. 自由度数不变和瞬时速度、瞬时加速度不变 3.曲柄滑块机构共有( )瞬心。 A .4个 B .6个 C. 8个 D. 10个 4. 两构件直接接触,其相对滚动兼滑动的瞬心在( )。 A. 接触点 B. 接触点的法线上 C. 接触点法线的无穷远处 D. 垂直于导路的无穷远处 5.最简单的平面连杆机构是( )机构。 A .一杆 B .两杆 C. 三杆 D. 四杆 6. 机构的运动简图与( )无关。 A. 构件数目 B. 运动副的数目、类型 C. 运动副的相对位置 D. 构件和运动副的结构 7.机构在死点位置时( )。 A .γ=90° B .γ=45° C. α=0° D. α=90° 8. 曲柄摇杆机构以( )为原动件时,机构有死点。 A. 曲柄 B. 连杆 C.摇杆 D. 任一活动构件 9.凸轮的基圆半径是指( )半径。 A .凸轮转动中心至实际轮廓的最小 B .凸轮转动中心至理论轮廓的最小 C. 凸轮理论轮廓的最小曲率 D .从动件静止位置凸轮轮廓的 10. 从动件的推程采用等速运动规律时,在( )会产生刚性冲击。 A. 推程的始点 B. 推程的中点 C. 推程的终点 D. 推程的始点和终点 11.一对齿轮在啮合过程中,啮合角的大小是( )变化的。 A. 由小到大再逐渐变小 B .由大到小逐渐变小 C. 先由大到小再到大 D .始终保持定值,不 12. 齿轮机构安装中心距等于标准中心距时,节圆直径与分度圆相比较,结论是( )。 A. 节圆直径大 B. 分度圆直径大 C. 两圆直径相等 D. 视具体情况而定 13.在斜齿轮模数计算中,下面正确的计算式为( )。 A .βcos t n m m = B. βsin t n m m = C .αcos t n m m = D βcos n t m m = 14. 标准直齿圆柱齿轮机构的重合度ε值的范围是( )。 A. ε<1 B. ε=1 C. 1<ε<2 D. ε>2 15.在机械系统的启动阶段,系统的动能( ),并且( )。 A. 减少 输入功大于总消耗功 B .增加 输入功大于总消耗功 C. 增加 输入功小于总消耗功 D. 不变 输入功等于零 16. 在机械系统速度波动的一个周期中的某一时间间隔内,当系统出现( )时,系统的运动速度( ) ,此时飞轮将( )能量。
机械原理计算题
五. 计算题 (每小题10 分, 共20分) 1.计算下图示机构的自由度,指出复合铰链、局部自由度和虚约束,并判断机构是否具有确定运动。 C处是复合铰链;无局部自由度和虚约束;(3分) 自由度:F=3n-2P L-P h (2分)n=5 P L =7 P h=0 (3分) =3*5-2*7-0=1 (1分) 机构具有确定运动(1分) 2.计算下图示机构的自由度,指出复合铰链、局部自由度和虚约束,并判断机构是否具有确定运动。 C处是复合铰链;F是局部自由度;E、E′互为虚约束;(3分) 自由度:F=3n-2P L-P h (2分)n=7 P L =9 P h=1 (1分) =3*7-2*9-1=2 (1分) 机构具有确定运动(1分) 有确定的运动(2分) 收集于网络,如有侵权请联系管理员删除
收集于网络,如有侵权请联系管理员删除 3.计算下图示机构的自由度,指出复合铰链、局部自由度和虚约束,并判断机构是否具有确定运动。 无复合铰链和虚约束;有 局部自由度;(3分) 自由度:F=3n-2P L -P h (2分)n=4 P L =4 P h =2 (3分) =3*4-2*4-2=2 (1分) 有确定的运动 (1分) 4.计算下图示机构的自由度,指出复合铰链、局部自由度和虚约束,并判断机构是否具有确定运动。 E 处是复合铰链;无局部自由度和虚约束;(3分) 自由度:F=3n-2P L -P h (2分)n=7 P L =10 P h =0 (3分) =3*7-2*10=1 (1 分) 机构具有确定运动 (1分)
收集于网络,如有侵权请联系管理员删除 5.计算图示机构的自由度,指出复合铰链、局部自由度和虚约束,并判断机构是否具有确定运动。 机构有复合铰链、局部自由度、虚约束;(3分) 自由度:F=3n-2P L -P h (2分)n=8 P L =11 P h =1 (3分) F=3*8-2*11-1=1(1分) 机构具有确定运动 (1分) 6.在图示的车床变速箱中,移动三联齿轮a 使齿轮3’和4’啮合。又移动双联齿轮b 使齿轮5’和6’啮合。已知各轮的齿数为 48',50',42',38',58,42654321======z z z z z z ,电动机的转速m in /14451r n =,求带轮转速的大小和方向。 47.150 3842484258''''53164261'16-≈????-='-==z z z z z z n n i min /98347 .11445''1616r i n n -≈-==
四.计算题 1、(2013四川自贡)如图所示(滑轮组的绕绳未画出),人以600N 的力向下拉动绕在滑轮组的绳子一端10秒,使绳端向下移动了1.5m ,重物匀速上升了0.5m ,已知滑轮组的机械效率为70%(g=10N/kg ). (1)按题意画出滑轮组的绕绳. (2)人所做功的功率多大? (3)被吊起的重物质量多大? 解:(1)根据n=3,即动滑轮上绳子段数是3股; 则绳子的固定端应从动滑轮上开始缠绕,如图: (2)∵W 总=FS=600N×1.5m=900J; ∴P=W/t=900J/10s=90W. (3)∵S=nh;∴n=S/h=15m/05m=3; 由η=G/nF 得:G=ηnF=70%×3×600N=1260N; ∴m=G/g=1260N/10Nkg=126kg. 2.(2013乐山)某建筑工地用升降机提升大理石的示意图如图所示。升降机 货箱的重力是400N ,g 取10N/kg 。不计滑轮和钢丝绳的重力,不计摩擦。试求: (1)已知大理石的密度是2.8×103kg/m 3,每块大理石的体积是1.0×10-2m 3 ,则每块大理石的重力是多少? (2)如果每根钢丝绳上能承受的最大拉力是2000N ,则该升降机一次最多能匀速提升多少块大理石? (3)某次提升中,升降机在1min 内将货物匀速提升了15m ,钢丝绳的拉力是2000N 。则钢丝绳的拉力的 功率是多少? (1) 每块大理石重: N Kg N m m Kg Vg mg G 280/10100.1/108.23233=????===-ρ (2分) (2) 升降机一次能提起的大理石块数: 块每块大理石重量能提起的大理石总重量2028040020003=-?== N N N n (3) 钢丝绳端移动的距离:m m h s 451533=?== (1分) 把货物提升15 m 做的功:J m N Fs W 4 109452000?=?== (1分) 升降机的功率:w s J J t W P 150060109min 110944=?=?== (1分) 3.(2013扬州)(6分)工人用如图所示的装置将重物提高5m ,已知物重为800N ,人对绳的拉力为500N 。 求此过程中: (1)做的做功。
五、计算题 (每小题10 分, 共20分) 1.计算下图示机构的自由度,指出复合铰链、局部自由度与虚约束,并判断机构就是否具有确定运动。 C处就是复合铰链;无局部自由度与虚约束;(3分) 自由度:F=3n-2P L-P h (2分)n=5 P L =7 P h=0 (3分) =3*5-2*7-0=1 (1分) 机构具有确定运动(1分) 2.计算下图示机构的自由度,指出复合铰链、局部自由度与虚约束,并判断机构就是否具有确定运动。 C处就是复合铰链;F就是局部自由度;E、E′互为虚约束;(3分) 自由度:F=3n-2P L-P h (2分)n=7 P L =9 P h=1 (1分) =3*7-2*9-1=2 (1分) 机构具有确定运动(1分) 有确定的运动(2分) 3.计算下图示机构的自由度,指出复合铰链、局部自由度与虚约束,并判断机构就是否具有确定运动。 无复合铰链与虚约束;有局部自由度;(3分) 自由度:F=3n-2P L-P h (2分)n=4 P L =4 P h=2 (3分) =3*4-2*4-2=2 (1分) 有确定的运动 (1分) 4.计算下图示机构的自由度,指出复合铰链、局部自由度与虚约束,并判断机构就是否具有确定运动。 E处就是复合铰链;无局部自由度与虚约
束;(3分) 自由度:F=3n-2P L -P h (2分)n=7 P L =10 P h =0 (3分) =3*7-2*10=1 (1分) 机构具有确定运动 (1分) 5.计算图示机构的自由度,指出复合铰链、局部自由度与虚约束,并判断机构就是否具有确定运动。 机构有复合铰链、局部自由度、虚约束;(3分) 自由度:F=3n-2P L -P h (2分)n=8 P L =11 P h =1 (3分) F=3*8-2*11-1=1(1分) 机构具有确定运动 (1分) 6.在图示的车床变速箱中,移动三联齿轮a 使齿轮3’与4’啮合。又移动双联齿轮b 使齿轮5’与6’啮合。已知各轮的齿数为48',50',42',38',58,42654321======z z z z z z ,电动机的转速m in /14451r n =,求带轮转速的大小与方向。 47.1503842484258''''53164261'16-≈????-='-==z z z z z z n n i min /98347 .11445''1616r i n n -≈-== 其运动方向与1相反 7.如 图,已知 z 1=6, z 2=z 2, =25, z 3=57, z 4=56,求 i 14 ?
1,一名工人用如图11所示的滑轮组提起450N的重物,绳自由端的拉力F为200N,重物在5s内匀速上升了1m.则拉力的功率是______________W,滑轮组的机械效率是______________. 2.用图1所示装置提升重为900牛的物体A,加在绳自由端的拉力大小为400牛时恰好可以使物体匀速上升.求:(1)求此时滑轮组的机械效率;(2)若不计绳重和摩擦,求动滑轮的重;(3)若提升的重物改为1200牛,此时滑轮组的机械效率又为多少?此时需要在绳自由端加多大的拉力才能将物体匀速拉起? 图1 3如图22所示装置,绳重及摩擦不计。装卸工人将重为800N的货物提至高处,人对绳的拉力F1为500N,货物在1min内匀速上升了5m。 (1)请在图上画出绳子的绕法; (2)求滑轮组的机械效率; (3)如果重物是600N,要把重物提升5m,求拉力做的功。 G 图22 4.用动滑轮将重为80牛的物体匀速提升2米,拉力做功200焦.不考虑绳重和一切摩擦.(1)求此时动滑轮的机械效率;(2)如果该动滑轮匀速提升200牛的重物,拉力的功率为11瓦,则重物上升的速度是多大? 图2 5.一个人用滑轮组匀速提升重G=128N的物体,滑轮组的机械效率为80%,在4s内人用F=40N的力使绳端移动4m.求出绳子的股数n。同时算出有用功的大小和总功功率. 6.用1225牛向下的拉力,通过机械效率为80%的滑轮组可以把重为4900牛的物体匀速提升起来.请画出这个滑轮组的装置图. 7.用图3所示滑轮组拉着一重为100牛的物体A沿水平面做匀速运动,所用拉力F的大小为40牛.(1)不计轮和绳的重力以及摩擦,求:物体A所受的摩擦力.(2)若滑轮组的机械效率为80%,求:物体A所受的摩擦力.图3
第一章绪论 学习要求: 1.明确本课程研究的对象、内容以及在培养机械类高级技术人才全局中的地位、作用和任务. 2.对机械原理的新发展有所了解. 内容提要: 本章讲授的重点是“本课程研究的对象及内容”.在本章的开始,介绍了机器、机构、机械等名词的概念,介绍了机器和机构的用途几区别,并通过实例说明各种机器的主要部分一般都是由各种机构组成的,目的是为了便于介绍本课程研究的对象及内容.在本章的学习中,应始终把注意力集中在了解本课程研究的对象及内容上.此外,对本课程的性质和特点也应有所了解,以便采取合适的学习方法把本课程学好. 机械-人造的用来减轻或替代人类劳动的多件实物的组合体。 原理-机械的组成原理、工作原理、分析和设计原理(方法)等。 任何机械都经历了:简单→复杂的发展过程。 机构-能够用来传递运动和力或改变运动形式的多件实物的组合体。 机器的共有特征: ①人造的实物组合体; ②各部分有确定的相对运动; ③代替或减轻人类劳动完成有用功或实现能量的转换机器的作用. 机器的分类: 原动机-实现能量转换(如内燃机、蒸汽机、电动机) 工作机-完成有用功(如机床等) 工作机的组成: 原动部分-是工作机动力的来源,最常见的是电动机和内燃机。 工作部分-完成预定的动作,位于传动路线的终点。 传动部分-联接原动机和工作部分的中间部分。 控制部分-保证机器的启动、停止和正常协调动作。 第二章机构的结构分析 学习要求: 1.搞清运动副、运动链、约束和自由度等重要概念. 2.能计算平面机构的自由度并判定其具有确定运动的条件. 3.对于一般由平面机构及简单空间机构(包括蜗轮蜗杆机构、圆锥齿轮机构、万向联轴节等)所组成的机械系统,能正确的画出其机构运动简图并计算其自由度. 4.对平面机构组成的基本原理有所了解. 内容提要: 1.机构的组成 ⑴构件构件是机器中每一个独立运动的单元体,是组成机构的基本要素之一,而零件是机器制造的单元体. ①实际的构件可以是一个独立运动的零件,也可以是若干个零件固连在一起的一个独立运动的整体; ②构件是机构中的刚性系统,构件中各零件间不能相对运动; ③构件的图形在表达上是用最简单的线条或几何图形来表示. ⑵运动副运动副是由两构件直接接触而组成的可动的连接,是组成机构的又一基本要素.而把两构件上能够参加接触而构成运动副的表面称为运动副元素. 运动副的基本特征为:
机械原理复习资料 一、填空题 1. 一对正确安装的标准直齿圆柱齿轮传动,为了增大重合度,应把齿轮参数中的齿数增大。 2. 标准渐开线齿轮不发生根切得最少齿数是17 齿。 3. 机构和零件不同,构件是运动的单元,而零件是制造的单元。 4. 用齿条型刀具范成法切制渐开线齿轮时,为使标准齿轮不发生根切,应使刀具的 齿顶线不超过极限啮合点N1。 5. 斜齿轮的标准参数在法面上,圆锥齿轮的标准参数在大端面面上。 6. 机构具有确定运动的条件是机构的自由度应大于零,且机构的原动件数应等于机构的自由度数。 7. 直齿圆柱齿轮的正确啮合条件是两齿轮模数相等,分度圆压力角相等。 8. 三角螺纹主要用于联接,而矩形螺纹主要用于传递运动。 9. 在平面机构中,若引入一个高副,将引入 1 个约束,而引入一个低副将引入 2 个约束。 10. 周转轮系由行星轮、行星架、中心架等基本构件组成。 11. 槽轮机构是将主动拨盘的等速回转运动转化为槽轮时动时停的间歇的运动。 12. 铰链四杆机构的三种基本类型是双曲柄机构、曲柄摇杆机构和双摇杆机构。 13. 平面运动副可分为低副和高副两大类。 14. 如果凸轮从动件以等速规律运动,在行程开始和终止位置存在刚性冲击。 15. 行程速比变化系数K= 1 时,没有急回特性。 16. 一对斜齿圆柱齿轮传动,在不改变齿轮的模数和齿数的前提下,可以通过改变螺旋角 的办法改变两齿轮中心距的大小。 17. 机构是由基本杆组、机架和原动件组成的。 18. 从动杆与凸轮轮廓的接触形式有尖子、滚子和平底三种。 19. 在曲柄摇杆机构中,当曲柄和机架两次共线位置时出现最小传动角。 20.凸轮的基圆半径越小,则凸轮机构的压力角越大,而凸轮机构的尺寸越小。
1、如图所示,现将重为5N的物体A沿长,高的斜面匀速从底端拉到顶端,在此过程中,F的大小恒为3N,所有时间是12s,求: (1)物体A从底端到顶端的平均速度; (2)物体A从底端到顶端过程中拉力F的功率; (3)求此斜面的机械效率.(保留一位小数) 2、建筑工地用如图l7所示的简易滑轮组提升砖块,某工人将重500 N的砖块一次性匀速提升到离地面4 m高的砌墙处,所用拉力为200 N,时间为20 s,这次提升砖块过程中:(计算结果保留一位小数) 求:(1) 利用此滑轮组做的有用功; (2)工人做的总功; (3)工人做功的功率; (4)该滑轮组的机械效率。 3、在农村常有家庭挖井取水,小明同学某次用如图甲所示的滑轮组提土时,将重为100N的土以s的速度从井中匀速提升,此时拉力做的功W随时间t的变化图象如图乙所示.求: (1)拉力的功率; (2)滑轮组的机械效率; (3)拉力的大小.
4、“塔吊”是建筑工地上常见的起重设备,在汶川地震灾区救援现场,用“塔吊”可将很重的水泥板方便地吊起并安放到工作区域内。(g取10N/kg) (1)现有一“塔吊”如图所示,它有一水平臂AB,AO叫平衡臂,OB叫吊臂。C为可移动的滑轮组,C移动的范围是从O点到B点。已知:AO=10m,OB=50m。若“塔身”的宽度和铁架、滑轮组所受重力及摩擦均不计,在A端所装配重的质量为5t,要想起吊质量为的水泥板,为安全起吊,C应移动到离O多远的地方? (2)若“塔吊”20s内将质量为的水泥板匀速提高了4m,那么,“塔吊”提升水泥板的功率是多少?如果机械做的额外功是3×104J,“塔吊”的机械效率是多少? 5、如图甲所示装置中,物体甲重G甲=150N,动滑轮重G轮=50N,人重G人=650N。轻杆AB可以绕O点转动,且OA∶OB=5∶9。不计轴摩擦和绳重,当轻杆AB在水平位置时,整个装置处于平衡状态,地面对物体乙的支持力为F1=210N。求: ⑴物体乙受到的重力G乙。 ⑵若用物体丙替换物体甲,并在物体乙的下方连接一个弹簧,如图乙所示,当轻杆AB 在水平位置时,整个装置处于平衡状态,弹簧对物体乙的作用力为F2=780N。此时地面对人的支持力F3。
一、判断题 1.构件是机构或机器中独立运动的单元体,也是机械原理研究的对象。( Y ) 2.当其它条件不变时,凸轮的基圆半径越大,则凸轮机构的压力角就越小,机构传力效果越好。( Y ) 3.在曲柄滑块机构中,只要原动件是滑块,就必然有死点存在。( Y ) 4.在摆动导杆机构中,若取曲柄为原动件时,机构的最小传动角γmin=0o;而取导杆为原动件时,则机构的最小传动角γmin=90o( N ) 5.在蜗杆传动中,蜗杆的升角等于蜗轮的螺旋角,且蜗杆与蜗轮的螺旋线旋向相同。( Y ) 6.斜齿圆柱齿轮的标准模数和标准压力角在法面上。( Y ) 7.与其他机构相比,凸轮机构最大的优点是可实现各种预期的运动规律。( Y ) 8.在铰链四杆机构中,若以曲柄为原动件时,机构会出现死点位置。( N ) 9、在平面机构中,一个高副引入二个约束。(N ) 10、根据渐开线性质,基圆内无渐开线,所以渐开线齿轮的齿根圆必须设计比基圆大。(N) 11、在曲柄滑块机构中,只要原动件是滑块,就必然有死点存在。( Y ) 12、机器的等效质量等于组成该机器的各构件质量的总和。( N ) 13.构件是机构或机器中独立运动的单元体,也是机械原理研究的对象。(Y ) 14.机构具有确定相对运动的条件为:其的自由度>0。( N ) 15.机构当出现死点时,对运动传递是不利的,因此应设法避免;而在夹具设计时,却需要利用机构的死点性质。( Y ) 16.渐开线直齿圆锥齿轮的标准参数取在大端上。( Y) 二、填空题 1.机构具有确定运动的条件是机构的自由度数等于原动件独立运动数。 2.同一构件上各点的速度多边形必相似于对应点位置组成的多边形。 3.在转子平衡问题中,偏心质量产生的惯性力可以用质径积相对地表示。
八、(13分)已知某机械一个稳定运动循环内的等效阻力矩r M 如图所 示,等效驱动力矩d M 为常数,等效构件的最大及最小角速度分别为:rad/s 200max =ω及rad/s 180min =ω。试求: (1)等效驱动力矩M d 的大小; (2)运转的速度不均匀系数δ; (3)当要求δ在0.05范围内,并不计其余构件的转动惯量时, 应 装在等效构件上的飞轮的转动惯量J F 。
八、13分。(1)3分;(2)3分;(3)3分;(4)4分 (1)22d r 00d d M M π π φφ=?? ∴d 171000100212.5244M πππ??= ?+?= ??? N ?m (2)()()1901802002121min max m =+=+= ωωω rad/s δωωω=-=-=max min m .200180190 0105 (3)()max 7212.5100618.501054W π?=-= J (4)J W F max m 2 ...==?=?ωδ6185190005 034272 kg ?m 2
八、(13分)一机械系统,当取其主轴为等效构件时,在一个稳定运动循环中, 如图所示。已知等效驱动力矩为常数,机械主轴的平均转速为其等效阻力矩M r 1000r/min。若不计 其余构件的转动惯量,试问: =? 的 (1)当要求运转的速度不均匀系数δ≤005 .时,应在主轴上安装一个J F 飞轮; (2)如不计摩擦损失,驱动此机器的原动机需要多大的功率N(kW ) ?
八、总分:13分。(1)(a)3分;(b)3分;(c)4分;(2)3分 (1)一稳定运动周期中驱动功和阻力功相等,所以 (a) d 5510260233M ππππ???+-?=? ??? M d ..=183 J (b) .518.31043.6333π???-= ??? J =?W max ωm .= ?=2100060 1047198π rad/s (c)J W F max m 2....==?=?ωδ 436331047198005007962 kg ?m 2 (2) N M ==?=d m . /../.ω100018310471981000192k W
一、填空题和填空题。 1. 在平面机构中若引入H P 个高副将引入 H P 个约束,而引入L P 个低副 将引入 2L P 个约束,则活动构件数n 、约束数与机构自由度F 的关系是F =3n - 2L P - H P 。 2. 机构具有确定运动的条件是: 机构的自由度大于零,且机构自由度 数等于原动件数 ;若机构自由度F>0,而原动件数
北航机械原理四齿轮 设计
215.在渐开线齿轮设计中为使机构结构尺寸紧凑,确定采用齿数z=12的齿轮。试问: (1)若用标准齿条刀具范成法切制z=12的直齿圆柱标准齿轮将会发生什么现象?为什么?(要求画出几何关系图,无需理论证明。) (2)为了避免上述现象,范成法切制z=12的直齿圆柱齿轮应采取什么措施? (3)范成法切制z=12, β=30?的斜齿圆柱齿轮,会不会产生根切? 216.已知齿条刀具的参数:mm,,,。用范成法加工一对直齿圆柱外齿轮A、B。A轮齿数,变位系数 ;B轮齿数,变位系数。试问: (1)加工时,与两齿轮分度圆作纯滚动的刀具节线是否相同,为什么?加工出来的两轮齿廓曲线形状与不变位加工出来的齿廓曲线是否对应相同? (2)两轮按无侧隙安装时,中心距,顶隙c和啮合角各为多少? (3)两轮的分度圆齿厚S和齿全高h各为多少? 217.已知一对渐开线直齿圆柱齿轮参数如下:mm,,。试问: (1)要求这对齿轮无根切且实现无侧隙啮合,应采取何种类型传动? (2)若要求该对齿轮的中心距为103mm,能使两齿轮均不产生根切吗? 提示: 218.有一回归轮系(即输入轴1与输出轴3共线),已知, , ,。各轮的压力角α=20?,模数m=2mm,=1,=0.25。问为保证中心距最小,而且各轮又不产生根切应采用哪种变位传动方案?说明理由并写出各轮变位系数x的大小。
219.若一对直齿圆柱齿轮传动的重合度=1.34,试说明若以啮合点移动一个基圆周节为单位,啮合时有多少时间为一对齿,多少时间为两对齿,试作图标出单齿啮合区域,并标明区域长度与的关系。 220.图示为一渐开线AK ,基圆半径=20mm,K点向径=35mm。试画点处渐开线的法线,并计算K点处渐开线的曲率半径。 出K