
1.1工业机器人自动装配工作站配套设备功能
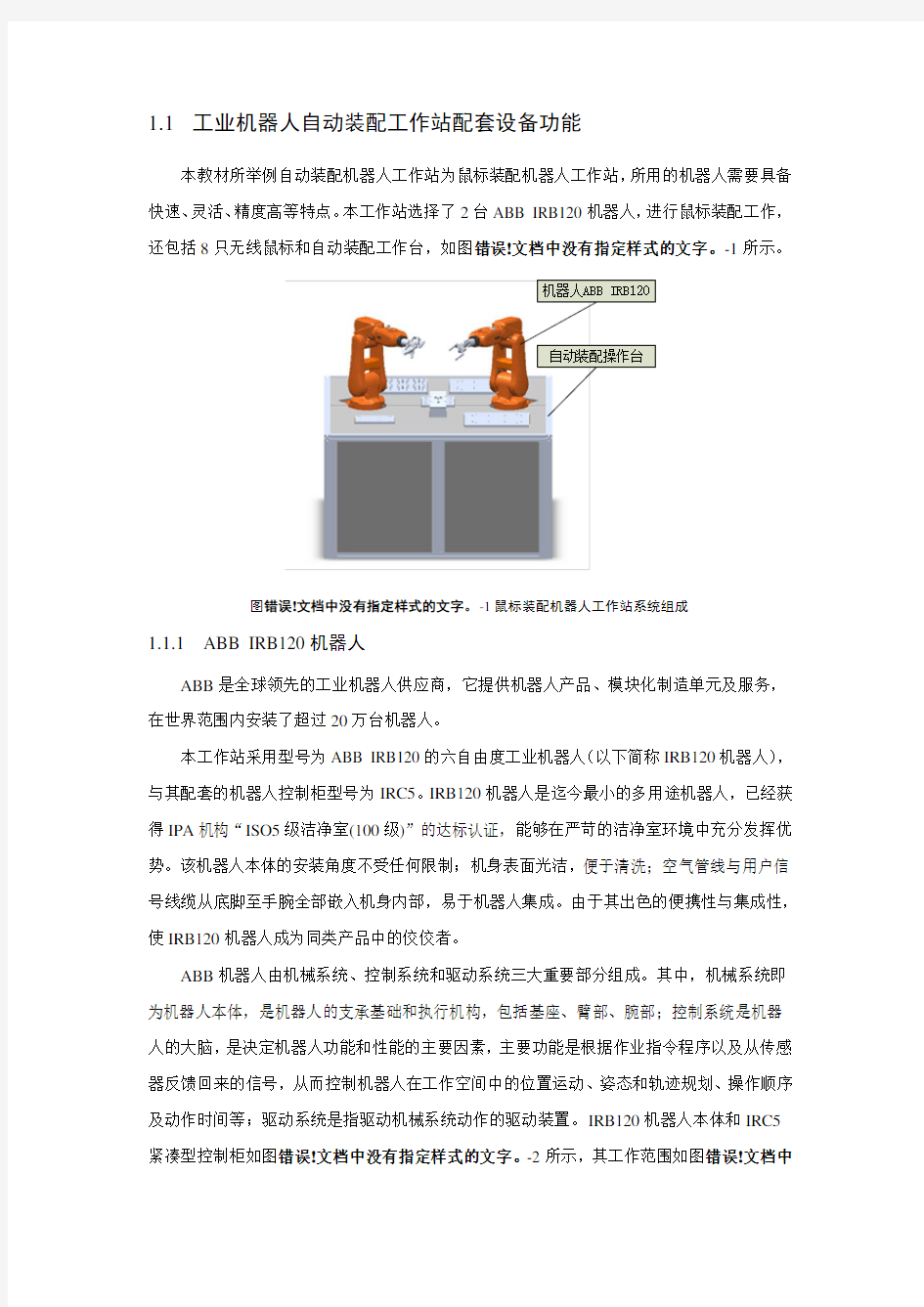
本教材所举例自动装配机器人工作站为鼠标装配机器人工作站,所用的机器人需要具备快速、灵活、精度高等特点。本工作站选择了2台ABB IRB120机器人,进行鼠标装配工作,还包括8只无线鼠标和自动装配工作台,如图错误!文档中没有指定样式的文字。-1所示。
图错误!文档中没有指定样式的文字。-1鼠标装配机器人工作站系统组成
1.1.1ABB IRB120机器人
ABB是全球领先的工业机器人供应商,它提供机器人产品、模块化制造单元及服务,在世界范围内安装了超过20万台机器人。
本工作站采用型号为ABB IRB120的六自由度工业机器人(以下简称IRB120机器人),与其配套的机器人控制柜型号为IRC5。IRB120机器人是迄今最小的多用途机器人,已经获得IPA机构“ISO5级洁净室(100级)”的达标认证,能够在严苛的洁净室环境中充分发挥优势。该机器人本体的安装角度不受任何限制;机身表面光洁,便于清洗;空气管线与用户信号线缆从底脚至手腕全部嵌入机身内部,易于机器人集成。由于其出色的便携性与集成性,使IRB120机器人成为同类产品中的佼佼者。
ABB机器人由机械系统、控制系统和驱动系统三大重要部分组成。其中,机械系统即为机器人本体,是机器人的支承基础和执行机构,包括基座、臂部、腕部;控制系统是机器人的大脑,是决定机器人功能和性能的主要因素,主要功能是根据作业指令程序以及从传感器反馈回来的信号,从而控制机器人在工作空间中的位置运动、姿态和轨迹规划、操作顺序及动作时间等;驱动系统是指驱动机械系统动作的驱动装置。IRB120机器人本体和IRC5
紧凑型控制柜如图错误!文档中没有指定样式的文字。-2所示,其工作范围如图错误!文档中
没有指定样式的文字。-3所示。IRB120机器人的参数见表1所示。
图错误!文档中没有指定样式的文字。-2 ABB IRB120机器人和控制柜
图错误!文档中没有指定样式的文字。-3工作范围
表1IRB120机器人参数
本工作站机器人控制柜配置的通讯I/O模块型号为DSQC652。通讯I/O模块连接的外部设备包括夹爪和吸盘。数字I/O信号定义见表2所示。
表2数字I/O信号定义
机器人控制柜放置于装配工作台中。
1.1.2无线鼠标
用于本工作站实现自动装配的工件为雷柏3000p无线鼠标,如图错误!文档中没有指定样式的文字。-4所示,该鼠标由4种零件(共5件)组成,分别为电池2节,USB接收器,鼠标,鼠标盖。安装顺序为先将鼠标放置在鼠标安装区,然后安装电池,再安装鼠标盖,最后插入USB接收器。
图错误!文档中没有指定样式的文字。-4雷柏3000p 无线鼠标
1.1.3 装配工作台
装配工作台框架由铝型材搭建而成,在框架四周用铁板蒙皮。装配工作台上的主要部件及功能如下:
(1)料盘
装配工作台上安装有5种料盘,分别用于码放鼠标、鼠标盖、电池、USB 接收器和成品鼠标,如图错误!文档中没有指定样式的文字。-5所示。
图错误!文档中没有指定样式的文字。-5料盘摆放位置
(2)鼠标装配区
机器人拾取鼠标放于鼠标装配区,完成电池和鼠标盖的安装。 (3)气源处理元件
本工作站使用的气源处理元件为将减压阀和过滤器集装在一体的过滤减压阀。 过滤器排水为人工排水,在过滤器的储液瓶内的水未满前需要定期排水。
USB 接收器料盘
电池料盘
鼠标料盘鼠标盖料盘
成品鼠标料盘
当储液瓶内的水快要装满时,按下储液瓶底部的凸起(排水阀开关),储液瓶中的水就能排出。
压力调节时,在转动旋钮前请先拉起再旋转,压下旋转旋钮为固定压力。旋转旋钮向右为调高出口压力,向左旋转为调低出口压力。调节压力时应逐步均匀地调至所需压力值,不应一步调节到位。
(4)气动控制元件
本工作站使用了5个双电控的两位五通电磁阀,来完成末端执行器上的气动夹手与吸盘的控制,如图错误!文档中没有指定样式的文字。-6所示双电控两位五通电磁阀。5个电磁阀的电源为一个50W的24V直流电源。
图错误!文档中没有指定样式的文字。-6双电控两位五通电磁阀