MATLAB_离散系统z域分析
- 格式:doc
- 大小:194.00 KB
- 文档页数:6
(数字信号处理)实验报告实验名称 实验五 离散系统的Z 域分析实验时间 年 月 日专业班级 学 号 姓 名成 绩 教师评语:一、实验目的1、掌握离散序列z 变换的计算方法。
2、掌握离散系统系统函数零极点的计算方法和零极点图的绘制方法,并能根据零极点图分析系统的因果性和稳定性。
3、掌握利用MATLAB 进行z 反变换的计算方法。
二、实验原理与计算方法 1、z 变换离散序列x (n )的z 变换定义为:∑∞-∞=-=n nzn x Z X )()(。
在MATLAB 中可以利用符号表达式计算一个因果序列的z 变换。
其命令格式为: syms n;f=(1/2)^n+(1/3)^n; ztrans(f)2、离散系统的系统函数及因果稳定的系统应满足的条件一个线性移不变离散系统可以用它的单位抽样响应h (n )来表示其输入与输出关系,即y (n )= x (n )* h (n )对该式两边取z 变换,得: Y (z )= X (z )· H (z ) 则: )()()(z X z Y z H =将H (z )定义为系统函数,它是单位抽样响应h (n )的z 变换,即∑∞-∞=-==n nzn h n h Z z H )()]([)(对于线性移不变系统,若n <0时,h (n )=0,则系统为因果系统;若∞<∑∞-∞=n n h |)(|,则系统稳定。
由于h (n )为因果序列,所以H (z )的收敛域为收敛圆外部区域,因此H (z )的收敛域为收敛圆外部区域时,系统为因果系统。
因为∑∞-∞=-=n nzn h z H )()(,若z =1时H (z )收敛,即∞<=∑∞-∞==n z n h z H |)(||)(1,则系统稳定,即H(z)的收敛域包括单位圆时,系统稳定。
因此因果稳定系统应满足的条件为:1,||<∞≤<ααz ,即系统函数H (z )的所有极点全部落在z 平面的单位圆之内。
实验八 离散系统的Z 域分析一、目的(1)掌握利用MATLAB 绘制系统零极点图的方法 (2)掌握离散时间系统的零极点分析方法(3)掌握用MATALB 实现离散系统频率特性分析的方法 (4)掌握逆Z 变换概念及MATLAB 实现方法二、离散系统零极点线性时不变离散系统可用线性常系数差分方程描述,即()()N Miji j a y n i b x n j ==-=-∑∑ (8-1)其中()y k 为系统的输出序列,()x k 为输入序列。
将式(8-1)两边进行Z 变换的00()()()()()Mjjj Nii i b zY z B z H z X z A z a z-=-====∑∑ (8-2) 将式(8-2)因式分解后有:11()()()Mjj Nii z q H z Cz p ==-=-∏∏ (8-3)其中C 为常数,(1,2,,)j q j M =为()H z 的M 个零点,(1,2,,)i p i N =为()H z 的N 个极点。
系统函数()H z 的零极点分布完全决定了系统的特性,若某系统函数的零极点已知,则系统函数便可确定下来。
因此,系统函数的零极点分布对离散系统特性的分析具有非常重要意义。
通过对系统函数零极点的分析,可以分析离散系统以下几个方面的特性:● 系统单位样值响应()h n 的时域特性; ● 离散系统的稳定性; ● 离散系统的频率特性;三、离散系统零极点图及零极点分析 1.零极点图的绘制设离散系统的系统函数为则系统的零极点可用MATLAB 的多项式求根函数roots()来实现,调用格式为:p=roots(A)其中A 为待根求多项式的系数构成的行矩阵,返回向量p 则是包含多项式所有根的列向量。
如多项式为231()48B z z z =++,则求该多项式根的MATLAB 命令为为:A=[1 3/4 1/8]; P=roots(A) 运行结果为: P =-0.5000-0.2500需注意的是,在求系统函数零极点时,系统函数可能有两种形式:一种是分子、分母多项式均按z 的降幂次序排列;另一种是分子、分母多项式均按1z -的升幂次序排列。
一.
实验目的
1.
熟悉离散信号Z 变换的原理及性质。
2.熟悉常见信号的Z 变换。
3.了解正/反Z 变换的MATLAB 实现方法。
4.了解离散信号的Z 变换与其对应的理想抽样信号的傅氏变换和拉氏变换之间的关系。
5.了解利用MATLAB 实现离散系统的频率特性分析的方法。
二.实验内容
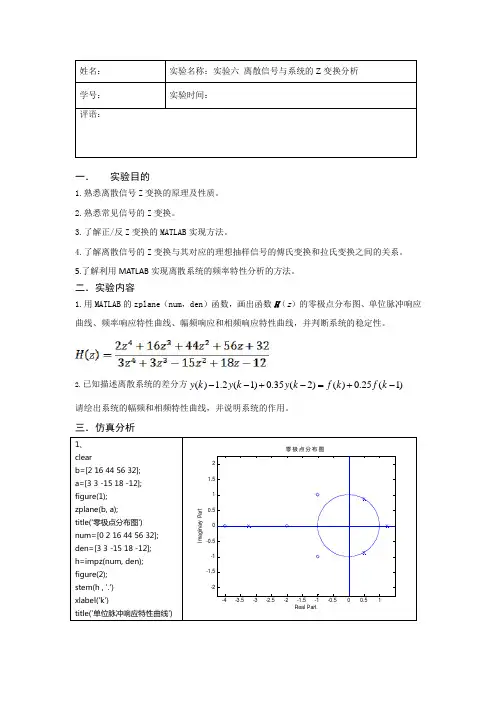
1.用MATLAB 的zplane (num ,den )函数,画出函数H (z )的零极点分布图、单位脉冲响应曲线、频率响应特性曲线、幅频响应和相频响应特性曲线,并判断系统的稳定性。
2.已知描述离散系统的差分方
() 1.2(1)0.35(2)()0.25(1)y k y k y k f k f k --+-=+-
请绘出系统的幅频和相频特性曲线,并说明系统的作用。
三.仿真分析
四.实验总结
1.进一步了解Z变换的原理及性质
2.进一步了解了信号的零极点分布与系统稳定性的关系。
课程设计任务书题目:基于MATLAB 的离散系统的Z 域分析课题要求:利用MATLAB 强大的图形处理功能,符号运算功能和数值计算功能,实现离散系统的Z 域分析仿镇波形。
课题内容:一.用MATLAB 绘制离散系统极零图,根据极零图分布观察系统单位响应的时域特性并分析系统的稳定性。
将极零图与h(k)对照起来画,看两者之间的关系。
至少以六个例子说明。
二. 用MATLAB 实现离散系统的频率特性分析1. 以二个实例分别代表低通,高通滤波器,绘出极零图,幅频特性,相频特性。
2. 用MATLAB 绘出梳状滤波器极零图与幅频特性FIR 型N z z H -=1)(IIR 型NN Nza z z H ----=11)(设N=8,a=0.8,0.9,0.98 三. 用MATLAB 实现巴特沃兹滤波器分析1. 用MATLAB 绘制巴特沃兹滤波器频率特性曲线(w c ,n 作为参数变化)2. 用MATLAB 绘制巴特沃兹滤波器的极零点分布图(w c ,n 作为参数变化)将两种图对照起来看极点分布与频率特性之间的关系。
时间安排:学习MATLAB 语言的概况 第1天 学习MATLAB 语言的基本知识 第2、3天 学习MATLAB 语言的应用环境,调试命令,绘图能力 第4、5天 课程设计 第6-9天 答辩 第10天指导教师签名: 2013年 月 日系主任(或责任教师)签名: 2013年 月 日目录1 离散系统的Z域分析 (3)1.1 z变换 (3)1.2 利用MATLAB的符号运算实现z变换 (3)1.3离散系统的系统函数及因果稳定的系统应满足的条件 (3)2离散系统零极点图及零极点分析 (4)2.1离散系统零极点 (4)2.2零极点的绘制 (5)3 MATLAB实现离散系统的频率特性分析 (11)3.1低通滤波器 (11)3.2高通滤波器 (12)3.3梳状滤波器的特性分析 (13)4 MATLAB实现巴特沃兹滤波器分析 (17)5 总结体会 (19)6参考文献 (19)1离散系统的Z 域分析 1.1 z 变换z 变换是离散信号与系统分析的重要方法和工具。
基于Matlab语言的线性离散系统的Z变换分析法实验一基于Matlab语言的线性离散系统的Z变换分析法班级: 姓名: 学号: 日期:一、实验目的:1、学习并掌握Matlab语言离散时间系统模型建立方法;2.学习离散传递函数的留数分析与编程实现的方法;3.学习并掌握脉冲与阶跃的编程方法;4.理解与分析离散传递函数不同极点的时间响应特点。
二、实验工具:1MATLAB软件(6、5以上版本);2每人计算机一台。
三、实验内容:1在Matlab语言平台上,通过给定的离散时间系统差分方程,理解课程中Z变换定义,掌握信号与线性系统模型之间Z传递函数的几种形式表示方法;2学习语言编程中的Z变换传递函数如何计算与显示相应的离散点序列的操作与实现的方法,深刻理解课程中Z变换的逆变换;3通过编程,掌握传递函数的极点与留数的计算方法,加深理解G(z)/z的分式方法实现过程;4通过系统的脉冲响应编程实现,理解输出响应的离散点序列的本质,即逆变换的实现过程;5通过编程分析,理解系统单位阶跃响应的Z变换就是系统的传递函数与单位阶跃函数Z变换,并完成响应的脉冲离散序列点的计算;6通过程序设计,理解课程中的不同的传递函数极点对系统动态行为的影响,如单独极点、复极点对响应的影响。
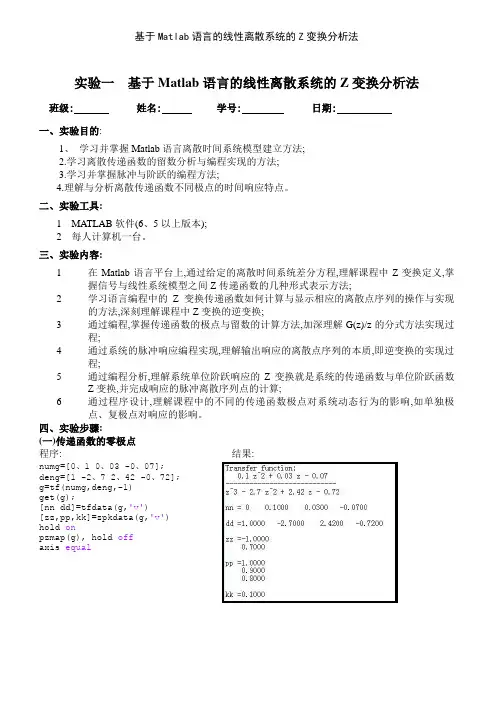
四、实验步骤:(一)传递函数的零极点程序: 结果:numg=[0、1 0、03 -0、07];deng=[1 -2、7 2、42 -0、72];g=tf(numg,deng,-1)get(g);[nn dd]=tfdata(g,'v')[zz,pp,kk]=zpkdata(g,'v')hold onpzmap(g), hold offaxis equal(二)留数法程序:numg=[2 -2、2 0、65];deng=[1 -0、6728 0、0463 0、4860];[rGoz, pGoz,other]=residue(numg,[deng 0])G=tf(numg,deng,-1)impulse(G)[y,k]=impulse(G);stem(k,y,'filled');impulse(G)结果:rGoz = 0、4905 + 0、0122i0、4905 - 0、0122i-2、31851、3374pGoz = 0、6364 + 0、6364i0、6364 - 0、6364i-0、6000other = []Transfer function:2 z^2 - 2、2 z + 0、65-----------------------------------z^3 - 0、6728 z^2 + 0、0463 z + 0、486Sampling time: unspecified(三)不同位置的根对系统的影响1)2个共轭极点(左圆内)+1实极点(圆内)P1 =0、6364 + 0、6364iP2=0、6364 - 0、6364iP3=-0、6000程序: 结果:zz3=[-0、2 0、4];pp3=[-0、6 0、6364+0、6364i 0、6364-0、6364i];kk3=2;tts3=-1;eg3zpk=zpk(zz3,pp3,kk3,tts3);eg3=tf(eg3zpk);[y,k]=impulse(eg3,50);stem(k,y,'filled'),grid2)2个共轭极点(右圆内)+1实极点(圆内)P1= -0、8592 P2= -0、0932 + 0、4558i P3= -0、0932 - 0、4558i 程序: 结果:zz3=[-0、2 0、4];pp3=[-0、8592 -0、0932+0、4558i -0、0932-0、4558i]; kk3=2;tts3=-1;eg3zpk=zpk(zz3,pp3,kk3,tts3);eg3=tf(eg3zpk);[y,k]=impulse(eg3,50);stem(k,y,'filled'),grid3)2个共轭极点(圆上)+1实极点(圆内)p1=0、6+0、8i p2=0、6-0、8i p3=-0、6程序: 结果:zz3=[-0、2 0、4];pp3=[-0、8592 -0、6+0、8i -0、6-0、8i];kk3=2;tts3=-1;eg3zpk=zpk(zz3,pp3,kk3,tts3);eg3=tf(eg3zpk);[y,k]=impulse(eg3,100);stem(k,y,'filled'),grid4、2个共轭极点(虚轴上)+1实极点(圆内)p1=i p2= -i p3= -0、6程序: 结果:zz3=[-0、2 0、4];pp3=[-0、6 i -i];kk3=2;tts3=-1;eg3zpk=zpk(zz3,pp3,kk3,tts3);eg3=tf(eg3zpk);[y,k]=impulse(eg3,100);stem(k,y,'filled'),grid5、2个实极点(圆内)+1个实极点(圆外)p1=2 p2=0、8 p3=-0、6程序: 结果:zz3=[-0、2 0、4];pp3=[2 0、8 -0、6];kk3=2;tts3=-1;eg3zpk=zpk(zz3,pp3,kk3,tts3);eg3=tf(eg3zpk);[y,k]=impulse(eg3,100);stem(k,y,'filled'),grid6、2个实极点(圆内)+1个实极点(圆上)p1=1 p2=0、8 p3=-0、6程序: 结果:zz3=[-0、2 0、4];pp3=[1 0、8 -0、6];kk3=2;tts3=-1;eg3zpk=zpk(zz3,pp3,kk3,tts3);eg3=tf(eg3zpk);[y,k]=impulse(eg3,100);stem(k,y,'filled'),gridp1=1 p2=-0、8 p3=-0、6程序: 结果:zz3=[-0、2 0、4];pp3=[1 0、8 -0、6];kk3=2;tts3=-1;eg3zpk=zpk(zz3,pp3,kk3,tts3);eg3=tf(eg3zpk);[y,k]=impulse(eg3,100);stem(k,y,'filled'),grid五、实验报告要求1、根据实验结果,分析离散传递函数不同极点的时间响应特点2、通过程序设计,分析不同的传递函数极点如:单极点、复极点、重根极点对系统动态行为的影响3、分析留数法的意义,根据系统的阶跃响应判别系统的稳定性4、对Z变换的进一步思考六、实验结果:1、根据实验结果,分析离散传递函数不同极点的时间响应特点。
一,实验目的理解关于z变换及其反变换的定义和MATLAB实现,理解系统零极点分布与系统特性的关系。
二,实验原理1.z变换z变换调用函数Z=ztrans(F)z反变换调用函数F=ilaplace(Z)2.离散时间系统的系统函数3.离散时间系统的零极点分析可以通过调用函数zplane:zplane(b,a):b、a为系统函数的分子、分母多项式的系数向量。
zplane(z,p):z、p为零极点序列。
三,实验内容(1)已知因果离散时间能系统的系统函数分别为:①②试采用MATLAB画出其零极点分布图,求解系统的冲击响应h(n)和频率响应H(),并判断系统是否稳定。
①MATLAB程序如下:b=[1 2 1]a=[1 -0.5 -0.005 0.3]subplot(131)zplane(b,a)subplot(132)impz(b,a,0:10)subplot(133)[H,w]=freqz(b,a)plot(w/pi,H)程序执行结果如下:由程序执行结果,当t趋于无穷,响应趋于0,所以该系统是稳定系统。
②MATLAB程序如下:b=[1]a=[1 -1.2*2^(1/2) 1.44]subplot(131)zplane(b,a)subplot(132)impz(b,a,0:10)subplot(133)[H,w]=freqz(b,a)plot(w/pi,H)程序执行结果如下:由程序执行结果,t趋于无穷,系统响应发散,故该系统是不稳定系统。
(2)已知离散时间系统系统函数的零点z和极点p分别为:试用MATLAB绘制下述6种不同情况下,系统函数的零极点分布图,并绘制相应单位抽样响应的时域波形,观察分析系统函数极点位置对单位抽样响应时域特性的影响和规律。
①z=0,p=0.25MATLAB程序如下:b=[1 0]a=[1 -0.25]sys=tf(b,a)subplot(211)zplane(b,a)subplot(212)impz(b,a)程序执行结果如下:②z=0,p=1 MATLAB程序如下: b=[1 0]a=[1 -1]sys=tf(b,a) subplot(211) zplane(b,a) subplot(212)impz(b,a)程序执行结果如下:③z=0,p=-1.25 MATLAB程序如下: b=[1 0]a=[1 1.25]sys=tf(b,a) subplot(211) zplane(b,a) subplot(212)impz(b,a)程序执行结果如下:④z=0,p1=0.8,p2=MATLAB程序如下:b=[1 0]a=[1 -1.6*cos(pi/6) 0.64] sys=tf(b,a)subplot(211)zplane(b,a)subplot(212)impz(b,a)程序执行结果如下:⑤z=0,p1=,MATLAB程序如下:b=[1 0]a=[1 -cos(pi/4) 1] sys=tf(b,a) subplot(211) zplane(b,a) subplot(212)impz(b,a)程序执行结果如下:⑥z=0,p1=1.2,p2=1.2MATLAB程序如下:z=0p=[1.2*exp(3*i*pi/4) 1.2*exp(-3*i*pi/4)] subplot(211)zplane(z,p)subplot(212)b=[1 0]a=[1 -2.4*cos(3*pi/4) 1.44]impz(b,a,0:30)程序执行结果如下:答:由执行结果知,当极点p在单位圆内时,系统响应收敛,该系统为稳定系统;当极点p 在单位圆上时,系统响应保持不变;当极点p在单位圆外时,系统响应发散,该系统为非稳定系统。
实验九 离散系统的Z 域分析一、 实验目的1、 掌握利用MATLAB 计算Z 域部分分式展开式的方法2、 掌握利用MATLAB 计算Z 正变换和Z 逆变换的方法二、 实验原理1、 计算Z 域部分分式展开式MATLAB 的信号处理工具箱提供了一个对F(Z)进行部分分式展开的函数residuez ,其调用形式为:【r ,p ,k 】=residuez (num ,den )式中,num 和den 分别为F(Z)的分子多项式和分母多项式的系数向量,r 为部分分式的系数向量,p 为极点向量,k 为多项式的系数向量。
也就是说,借助于residuez 函数,可将有理分式F(z)展开为: m z m k z k k zn p n r z p r z den z num z F )()2()1()(1)()1(1)1()()()(111++++-++-==-- 2、 计算Z 正变换和Z 逆变换MATLAB 的符号数学工具箱提供了计算z 正变换的函数ztrans 和计算z 反变换的函数iztrans ,其调用形式为:F=ztrans (f )f=iztrans (F )上述两式中,右端的f 和F 应分别为时域表达式和z 域表示式的符号表示,可应用函数sym 来实现,其调用形式为:S=sym (A )式中,A 为待分析的表示式的字符串,S 为符号化的数字或变量。
三、 实验内容及结果1、 用部分分式展开法求2)(22--=z z z z F 的展开式; >> num=[1 0 0];den=[1 -1 -2];[r,p,k]=residuez(num,den)r =0.66670.3333p =2-1k =0 即:)1(31)z 213213333.0216667.0)()()(1111----++-=++-==z z z z den z num z F ( 2、 求)()cos()(k ak k f ε=的z 变换;>> f=sym('cos(a*k)');F=ztrans(f)F =(z-cos(a))*z/(z^2-2*z*cos(a)+1)即:1cos 2)cos ()(2+--=a z z a z z z F 3、 求2)1(1)(z z F +=的z 逆变换。
实验一 离散系统时域分析与Z 域分析一.实验目的(1) 熟悉Matlab 的主要操作命令;(2) 掌握典型离散信号的特性(3) 掌握离散系统的频率响应二.实验原理1.系统单位脉冲响应()h n 与系统频率响应()j H e ω 系统单位脉冲响应:()h n Z −−→()()0n n H Z h n Z∞-==⋅∑系统函数:()()()101101mm n n B Z b b Z b Z H Z A Z a a Z a Z----++⋅⋅⋅+==++⋅⋅⋅+ 单位圆上序列的Z 变换为序列的傅里叶变换()()j j Z e H Z H e ωω== 2.系统幅频响应()j H eω与相频响应()φω 系统频率响应()()()j j j H e H e e φωωω=⋅三.实验中调用的函数eig (x):求解x 矩阵的特征相量和特征值。
fliplr (x):是将x 矩阵的列倒序。
[h,w]=freqz (b,a): 系统函数的频率响应h ,w 表示0~π 范围,其中b 表示系统函数的分子系数,按降幂顺序排列,a 表示系统函数的分母系数,按降幂顺序排列。
20*log10(abs (h)): 对系统函数的的频率响应h 取绝对值得到幅频响应h (分贝) angle (h): 是对系统函数的的频率响应h 求取相频响应四.实验内容(1) 数组的加、减、乘、除和乘方运算。
输入A=[1 2 3 4], B=[3 4 5 6], 求C=A+B, D=A-B, E= A.*B, F=A./B , G=A.^B, 用stem 语句画出A ,B ,C ,D ,E ,F ,G 。
程序如下:a=[1 2 3 4]b=[3 4 5 6]c=a+bd=a-be=a.*bf=a./bg=a.^bsubplot(2,4,1)stem(a)title('a')subplot(2,4,2)stem(b)title('b')subplot(2,4,3)stem(c)title('c')subplot(2,4,4)stem(d)title('d')subplot(2,4,5)stem(e)title('e')subplot(2,4,6)stem(f)title('f')subplot(2,4,7)stem(g)title('g')输出:a =1 2 3 4b =3 4 5 6c =4 6 8 10d =-2 -2 -2 -2e =3 8 15 24f =0.3333 0.5000 0.6000 0.6667g =1 16 243 4096(2) 用Matlab 实现下列序列:a)()0.8n x n = 015n ≤≤程序如下:N=16n=0:15xn=0.8.^nstem(xn)输出:b)()()0.23j n x n e += 015n ≤≤程序如下:N=16n=0:15xn=exp((0.2+3*j)*n)stem(xn)输出:c)()()()3cos 0.1250.22sin 0.250.1x n n n ππππ=+++ 015n ≤≤程序如下:N=n=0:15xn=3*cos(0.125*pi*n+0.2*pi)+2*sin(0.25*pi*n+0.1*pi)stem(xn)输出:d) 将c)中的x(n)扩展为以16为周期的函数()()1616x n x n =+,绘出四个周期。
实验九 离散系统Z 域分析1实验目的(1) 理解并掌握系统函数的概念。
(2) 掌握利用MA TLAB 绘制系统函数的零极点分布图。
(3) 掌握系统函数零极点的分布与系统时域、频域特性之间的关系。
(4) 利用MA TLAB 求系统函数零、极点的方法。
2实验原理及方法2.1离散时间LTI 系统的Z 域描述线性时不变离散系统可以用如下所示的线性常系数差分方程来描述。
)()(0j k f bi k y a Mj jNi i -=-∑∑== 9-1其中y(k)为系统输出序列,f (k)为输入系列。
将式9-1两边进行Z 变换得:)()()()()(00z B z A za zb z F z Y z H Ni ii Mj jj===∑∑== 9-2 式9-2中A(z)和B(z)分别是由描述系统的差分方程的系数决定的关于z 的多项式,将式9-2因式分解后有:∏∏==--=Ni iMj jp z q z Cz H 11)()()( 9-3其中C 为常数,q j (j =1,2,..,M )为H(z)的M 个零点,p i (i =1,2,…,N )为H(z)的N 个极点。
由以上分析可以看出,系统函数H(z)的零、极点的分布完全决定了系统的特性,若某离散系统的零点、极点已知,则系统函数便可确定下来。
因此,系统函数的零极点分布对我们进行离散系统特性的分析具有非常重要的意义。
通过对系统函数零极点的分析,我们可以分析离散系统以下几个方面的特性; (1) 系统单位响应h(k)的时域特性 (2) 离散系统的稳定性(3) 离散系统的频率特性(幅频响应和相频响应)要通过系统函数零极点来分析系统特性,首先就要求出系统函数的零极点,然后绘制零点、极点图。
MATLAB 为我们快速、高效地分析离散系统特性提供了强有力的工具。
下面就介绍如何利用MATLAB 实现这一过程。
设离散系统的系统函数为:)()()(z A z B z H =则系统函数的零点和极点可以用MA TLAB 的多项式求根函数roots()来实现,调用函数roots()的命令格式为: p=roots(A)其中A 为待求根的多项式的系数构成的行向量,返回向量p 则是包含该多项式所有根位置的列向量。
实验一基于MATLAB语言的线性离散系统的Z变换分析法一、实验目的1. 学习并掌握 Matlab 语言离散时间系统模型建立方法;2.学习离散传递函数的留数分析与编程实现的方法;3.学习并掌握脉冲和阶跃响应的编程方法;4.理解与分析离散传递函数不同极点的时间响应特点。
二、实验工具1. MATLAB 软件(6.5 以上版本);2. 每人计算机一台。
三、实验内容1. 在Matlab语言平台上,通过给定的离散时间系统差分方程,理解课程中Z变换定义,掌握信号与线性系统模型之间Z传递函数的几种形式表示方法;2. 学习语言编程中的Z变换传递函数如何计算与显示相应的离散点序列的操作与实现的方法,深刻理解课程中Z变换的逆变换;3. 通过编程,掌握传递函数的极点与留数的计算方法,加深理解G(z)/z 的分式方法实现过程;4. 通过系统的脉冲响应编程实现,理解输出响应的离散点序列的本质,即逆变换的实现过程;5. 通过编程分析,理解系统的Z传递函数等于单位脉冲响应的Z变换,并完成响应的脉冲离散序列点的计算;6. 通过程序设计,理解课程中脉冲传递函数极点对系统动态行为的影响,如单独极点、复极点对响应的影响。
四、实验步骤1.创建系统How to create digital system g Four examples are as follows:numg=[0.1 0.03 -0.07];deng=[1 -2.7 2.42 -0.72];g=tf(numg,deng,-1)get(g);[nn dd]=tfdata(g,'v')[zz,pp,kk]=zpkdata(g,'v')Unite circle region with distrbuting zeros points and poles points hold onpzmap(g), hold offaxis equal运行结果:2.转换为零极点标准形式Convert from tf(z-function) to zpk(z-function) Part C exercise form gg=zpk(g)[zz,pp,kk tts]=zpkdata(gg,'v')[z,p k,ts]=zpkdata(g,'v')运行结果:3.四个例子Four examples are as follows:Part A exerciseeg1mun=[1.25 -1.25,0.30];eg1den=[1 -1.05 0.80 -0.10];eg1=tf(eg1mun,eg1den,-1);eg1zpk=zpk(eg1);[zz1,pp1,kk1,tts1]=zpkdata(eg1zpk,'v');Part B exerciseeg2mun=[0.84 -0.062 -0.156 0.058];eg2den=[1 -1.03 0.22 0.094 0.05];eg2=tf(eg2mun,eg2den,-1);eg2zpk=zpk(eg2);[zz2,pp2,kk2,tts2]=zpkdata(eg2zpk,'v');Part C exercisezz3=[-0.2 0.4];pp3=[0.6 0.5+0.75i 0.5-0.75i 0.3];kk3=150;tts3=-1;eg3zpk=zpk(zz3,pp3,kk3,tts3);eg3=tf(eg3zpk);Part D exercisezz4=[-0.3 0.4+0.2i 0.4-0.2i];pp4=[-0.6 -0.3,0.5 0.6];kk4=5;tts4=-1;eg4zpk=zpk(zz4,pp4,kk4,tts4);eg4=tf(eg4zpk);4.留数法Residue method and impluse response numg=[2 -2.2 0.65];deng=[1 -0.6728 0.0463 0.4860]; [rGoz, pGoz,other]=residue(numg,[deng 0]) [mag_pGoz,theta_pGoz] =xy2p(pGoz)[mag-rGoz,theta-rGoz]=xy2p(rGoz)G=tf(numg,deng,-1)impulse(G)[y,k]=impulse(G);stem(k,y,'filled');impulse(G)运行结果:5.复杂极点响应When transfer function is G(Z) with complex ,t=t*ts;pole of z=e^(+-j*30*pi/3) and z=-0.5,as well as its gain value is unit step signal,its collecting cycle is 0.5 second,how to analyze its response.gcfts=0.3;num=[1 0.5];den=conv([1 -exp(i*pi/3)],[1 -exp(-i*pi/3)]);g1=tf(num,den,ts)[y,k]=impulse(g1,20);stem(k,y,'filled'),grid运行结果:6.重极点响应How to analyze response with repeating poles dtime=[0:90];y(k+2)-1.8y(k+1)+0.81y(k)=3u(k+1)-1.2u(k) yi=impulse(gstep,dtime)gcfnum=[3 -1.2];den=[1 -1.8 0.81];[rGoz, pGoz,other]=residue(num,[den 0])t=0:60;y=rGoz(2,1).*(t.*(pGoz(2,1).^(t-1)))+rGoz(1,1).*(pGoz(1,1).^(t)) y1=zeros(1,61);y1(1,1)=rGoz(3,1);y=y+y1;t=ts*t;stem(t,y,'filled'),gridSpecial example about difference real pole tosystem response[rGoz,pGoz,other]=residue(num,[den,0])num1=[rGoz(1) 0];den1=[1 -pGoz(1)]gg1=tf(num1,den1,ts)[y,t]=impulse(gg1,50)stem(t,y,'filled'),grid运行结果:7.阶跃响应numg=[2 -2.2 0.56];deng=[1 -0.6728 0.0463 0.4860];g=tf(numg,deng,1);numgstep=[numg 0];dengstep=conv(deng,[1 -1]);gstep=tf(numgstep,dengstep,1)dtime=[0:90];yi=impulse(gstep,dtime)subplot(2,1,1)stem(dtime,yi,'filled')ys=step(g,dtime);subplot(2,1,2)stem(dtime,ys,'filled')dcgain(g)ys_ss=ys(end)ys_ss=ys(max(dtime))运行结果:Example 1: Analysis of subsection input function subplot(1,1,1)num=[2 -2.2 0.56];den=[1 -0.6728 0.0463 0.4860];ts=0.2;g=tf(num,den,ts);dtime=[0:ts:8]';u=2.0*ones(size(dtime));ii=find(dtime>=2.0); u(ii)=0.5;y=lsim(g,u,dtime);stem(dtime,y,'filled'),gridhold onplot(dtime,u,'o')hold offtext(2.3,-1.8,'output')text(1.6,2.3,'input')运行结果:五、实验思考1、根据实验结果,分析离散传递函数不同极点的时间响应特点。
实验八离散系统的Z 域分析一、 目的(1) 掌握利用MATLAB 绘制系统零极点图的方法(2) 掌握离散时间系统的零极点分析方法 (3) 掌握逆Z 变换概念及MATLAB 实现方法二、 离散系统零极点线性时不变离散系统可用线性常系数差分方程描述,即NM∖ ay(n-i)=扛 b j X(n- j)i =Qj z0其中y(k)为系统的输出序列,x(k)为输入序列。
将式(8-1)两边进行Z 变换的将式(8-2)因式分解后有:M丨【(z-q j ) H(Z) =C 怡 丨丨(z- P i )i A其中C 为常数,q j (j =1,2,…,M)为H(Z)的M 个零点,p(i =1,2/ ,N)为H(Z)的N 个极点。
系统函数H (Z)的零极点分布完全决定了系统的特性, 若某系统函数的零极点已知, 则系统函数便可确定下来。
因此,系统函数的零极点分布对离散系统特性的分析具有非常重要意义。
通过对系 统函数零极点的分析,可以分析离散系统以下几个方面的特性:系统单位样值响应h(n)的时域特性; 离散系统的稳定性; 离散系统的频率特性;三、离散系统零极点图及零极点分析1 •零极点图的绘制设离散系统的系统函数为则系统的零极点可用MATLAB 的多项式求根函数roots()来实现,调用格式为: p=roots(A) 其中A 为待求多项式的系数构成的行矩阵,返回向量 P 则是包含多项式所有根的列向23 1量。
如多项式为B(Z)=Z -Z -,则求该多项式根的 MATLAB 命令为:4 8A=[1 3/4 1/8];P=roots(A)(8-1)H(Z) =Y(Z) X(Z)MXbjZ-j j =0二-NXBiZ ji =0B(Z) A(Z)(8-2)(8-3)H(Z)二B(Z) A(Z)运行结果为: P =-0.5000 -0.2500需注意的是,在求系统函数零极点时,系统函数可能有两种形式:一种是分子、分 母多项式均按Z 的降幕次序排列;另一种是分子、分母多项式均按 Z J 的升幕次序排列 这两种方式在构造多项式系数向量时稍有不同。
atlab讲义-离散时间系统的Z 域分析离散时间系统的Z 域分析一、实验目的1. 加深理解和掌握离散时间序列信号求Z 变换和逆Z 变换的方法。
2. 加深理解和掌握离散时间系统的零极点分布于时域特征关系。
二、实验内容1. 离散时间信号的Z 变换()()n n F z f n z +∞-=-∞=∑(1)双边Z 变换,单边Z 变换MATLAB 实现 F=ztrans(f)//Z 变换 f=iztrans(F)//逆Z 变换7-1 已知序列1()()n f n a u n =,序列2()f n 的Z 变换为22()/(1/2)F z z z =-,求序列1()f n 的z 变换,2()F z 的逆z 变换。
f1=sym('a^n'); F1=ztrans(f1) F2=sym('z/(z-1/2)^2'); f2=iztrans(F2) F1 =z/a/(z/a-1) f2 =2*(1/2)^n*n由此可知 11zza F z z a a ==--,21()2()()2n f n nu n =2. 系统函数1201212012()()()mm nn b b z b z b z B z H z A z a a z a z a z------++++==++++ (2) 1111(1)(2)()()(1)(2)1(1)1(2)1()r r r n H z k k z p z p zp n z----=++++++--- MATLAB 实现 residuez()函数。
7-2 已知因果系统的传递函数2()(1/2)(1/4)z H z z z =--。
利用MATLAB 计算()H z 的部分分式展开,求单位冲激响应画出图形。
B=1;A=[1 -0.75 0.125]; [r p k]=residuez(B,A) r =2 -1 p =0.5000 0.2500 k =[]1121()10.510.25H z z z--=---。