
0引言光子电场传感器利用电光效应,即当光信号通过电光材料后,使
光信号受到待测电场调制,再从调制光波中解调出被测的电磁信号,
这种测量具有抗电磁干扰能力强的优点。在过去30年中,已开发出不
同类型基于电光效应的传感器[1]。利用电光效应,晶体被用在高电压测
量上[2],一些研究工程已完成测量非常高的电场,如测量高压输电线附
近的电场。然而,为了让一些光线进入传感器头,这种测量系统必须由
许多独立的光学元件构建,这使得测量系统复杂,限制了它在实践中
的应用。
最近,越来越多的研究集中在:1.集成电光传感器,它其有体积
小,操作结构简单和系统化芯片等特点;2.全介质电磁场传感器,它有
很多好处是因为它们不会扰乱电磁场、规模小、高度便携且带宽很宽。
集成光电传感器的研究主要集中在如何增加传感器对近场测量的灵
敏度[3]。因此,这种传感器适合广泛应用于弱电磁信号检测[4]。在高电压
测量,一些领域研究人员使用这种传感器获取微弱的放电或小电压信
号。电光调制器被用于在高压输电电缆的局部放电来获得信号[5-6]。已
有报道,全介质电磁场传感器的测量可达到200V/m [7]。即使这对一些
电场测量是足够的,但对于宽频带源的测量仍然显得不足。当然,研究
者也在坚持不懈的探索如何有效地改进传感器的敏感性。下面分别介
绍的几种典型的光子电场传感器。2
三种不同类型的光电传感器2.1D 型光纤与电光平板耦合的光电传感器
电场测量已广泛应用于商业,工业和科学的很多领域,如高能微
波武器使用电场去破坏或是干扰电子系统,破坏电子的电场振幅典型
值约为10kV/m ,最低可以达到100V/m [12-13]。商业中,D 点传感器在测
量电场方面表现出足够的灵敏度;但是由于D 点传感器是金属,故而
有第二章中探讨的问题,基于此,美国的Spencer Chadderdon 等[8]人研
究出了基于光纤的的介电电磁场传感器:基于平板耦合光纤传感器
(SCOS )。
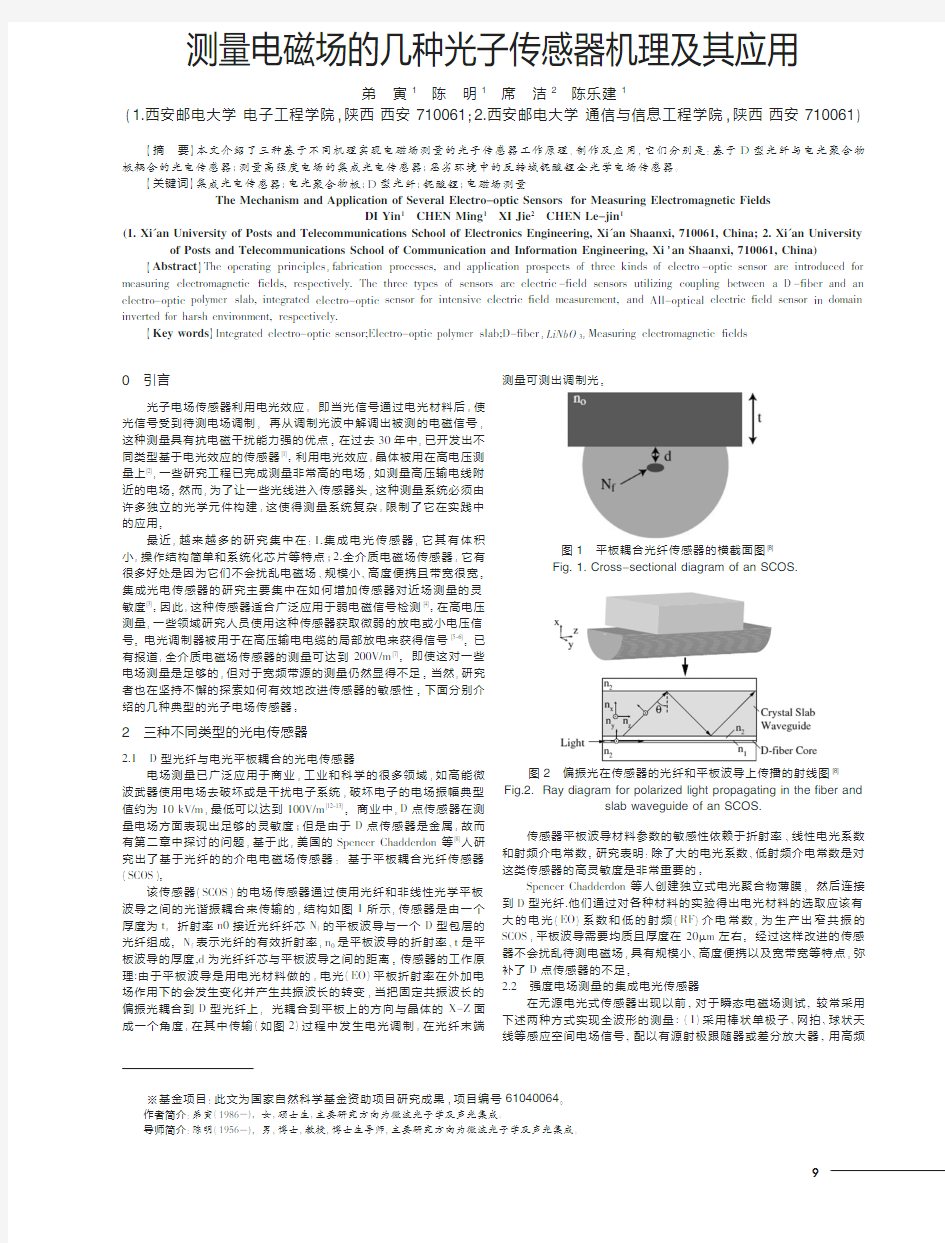
该传感器(SCOS )的电场传感器通过使用光纤和非线性光学平板
波导之间的光谐振耦合来传输的,结构如图1所示,传感器是由一个
厚度为t ,折射率n0接近光纤纤芯N f 的平板波导与一个D 型包层的
光纤组成。N f 表示光纤的有效折射率,n 0是平板波导的折射率、t 是平
板波导的厚度,d 为光纤纤芯与平板波导之间的距离。传感器的工作原
理:由于平板波导是用电光材料做的,电光(EO )平板折射率在外加电
场作用下的会发生变化并产生共振波长的转变,当把固定共振波长的
偏振光耦合到D 型光纤上,光耦合到平板上的方向与晶体的X-Z 面
成一个角度,在其中传输(如图2)过程中发生电光调制,在光纤末端测量可测出调制光。
图1平板耦合光纤传感器的横截面图[8]Fig.1.Cross-sectional diagram of an SCOS.
图2偏振光在传感器的光纤和平板波导上传播的射线图[8]Fig.2.Ray diagram for polarized light propagating in the fiber and slab waveguide of an SCOS.传感器平板波导材料参数的敏感性依赖于折射率、线性电光系数和射频介电常数。研究表明:除了大的电光系数、低射频介电常数是对这类传感器的高灵敏度是非常重要的。Spencer Chadderdon 等人创建独立式电光聚合物薄膜,然后连接到D 型光纤.他们通过对各种材料的实验得出电光材料的选取应该有大的电光(EO )系数和低的射频(RF )介电常数,为生产出窄共振的SCOS ,平板波导需要均质且厚度在20μm 左右。经过这样改进的传感器不会扰乱待测电磁场,具有规模小、高度便携以及宽带宽等特点,弥补了D 点传感器的不足。2.2强度电场测量的集成电光传感器在无源电光式传感器出现以前,对于瞬态电磁场测试,较常采用下述两种方式实现全波形的测量:(1)采用棒状单极子、网拍、球状天
线等感应空间电场信号,配以有源射极跟随器或差分放大器,用高频
※基金项目:此文为国家自然科学基金资助项目研究成果,项目编号61040064。
作者简介:弟寅(1986—),女,硕士生,主要研究方向为微波光子学及声光集成。
导师简介:陈明(1956—),男,博士,教授,博士生导师,主要研究方向为微波光子学及声光集成。
测量电磁场的几种光子传感器机理及其应用
弟寅1陈明1席洁2陈乐建1
(1.西安邮电大学电子工程学院,陕西西安710061;2.西安邮电大学通信与信息工程学院,陕西西安710061)
【摘要】本文介绍了三种基于不同机理实现电磁场测量的光子传感器工作原理、制作及应用,它们分别是:基于D 型光纤与电光聚合物板耦合的光电传感器;测量高强度电场的集成光电传感器;恶劣环境中的反转域铌酸锂全光学电场传感器。
【关键词】集成光电传感器;电光聚合物板;D 型光纤;铌酸锂;电磁场测量
The Mechanism and Application of Several Electro-optic Sensors for Measuring Electromagnetic Fields
DI Yin 1CHEN Ming 1XI Jie 2CHEN Le-jin 1
(1.Xi'an University of Posts and Telecommunications School of Electronics Engineering,Xi'an Shaanxi,710061,China;2.Xi'an University
of Posts and Telecommunications School of Communication and Information Engineering,Xi ’an Shaanxi,710061,China)
【Abstract 】The operating principles ,fabrication processes,and application prospects of three kinds of electro -optic sensor are introduced for measuring electromagnetic fields,respectively.The three types of sensors are electric -field sensors utilizing coupling between a D -fiber and an electro-optic polymer slab,integrated electro-optic sensor for intensive electric field measurement,and All-optical electric field sensor in domain inverted for harsh environment,respectively.
【Key words 】Integrated electro-optic sensor;Electro-optic polymer slab;D-fiber ,LiNbO 3,Measuring electromagnetic
fields
9
课程设计说明书 学生姓名:学号: 学院: 班级: 题目: 传感器测量系统设计 高 指导教师:高敏职称: 副教授 年 12 月 26 日
摘要 在工程实践中,经常会遇到各种需要测量转速的场合,例如在发动机、电动机、卷扬机、机床主轴等旋转设备的试验、运转和控制中,常需要分时或连续测量和显示其转速及瞬时转速。要测速,首先要解决是采样问题。在使用模技术制作测速表时,常用测速发电机的方法,即将测速发电机的转轴与待测轴相连,测速发电机的电压高低反映了转速的高低。为了能精确地测量转速外,还要保证测量的实时性,要求能测得瞬时转速方法。因此转速的测试具有重要的意义。 关键词:电动机,单片机,传感器,晶振电路,流程图
目录 1 概述 (3) 1.1本课题设计的目的和意义 (3) 1.2数字式转速测量系统的发展背景 (3) 2 单片机 (4) 2.1 单片机AT89C51介绍 (4) 3 系统方案提出和论证(传感器的选择) (7) 3.1 方案一霍尔传感器测量方案 (7) 3.2 方案二光电传感器 (8) 4 转速测量系统的原理 (9) 4.1 转速测量方法 (9) 4.2 转速测量原理 (9) 5 系统硬件设计 (11) 5.1 转速信号采集 (11) 5.2 转速信号处理电路设计 (13) 5.3 最小系统的设计 (14) 5.3.1 复位电路(图4.8) (14) 5.3.2 晶振电路 (16) 5.3.3 最小系统的仿真 (17) 总结 (18) 参考文献 (19)
1 概述 1.1 本设计课题的目的和意义 在工程实践中,经常会遇到各种需要测量转速的场合, 例如在发动机、电动机、卷扬机、机床主轴等旋转设备的试验、运转和控制中,常需要分时或连续测量和显示其转速及瞬时转速。要测速,首先要解决是采样问题。在使用模技术制作测速表时,常用测速发电机的方法,即将测速发电机的转轴与待测轴相连,测速发电机的电压高低反映了转速的高低。为了能精确地测量转速外,还要保证测量的实时性,要求能测得瞬时转速方法。因此转速的测试具有重要的意义。 这次设计内容包含知识全面,对传感器测量发电机转速的不同的方法及原理设计有较多介绍,在测量系统中能学到关于测量转速的传感器采样问题,单片机部分的内容,显示部分等各个模块的通信和联调。全面了解单片机和信号放大的具体内容。进一步锻炼我们在信号采集,处理,显示发面的实际工作能力。 1.2 数字式转速测量系统的发展背景 目前国内外测量电机转速的方法很多,按照不同的理论方法,先后产生过模拟测速法(如离心式转速表、用电机转矩或者电机电枢电动势计算所得)、同步测速法(如机械式或闪光式频闪测速仪)以及计数测速法。计数测速法又可分为机械式定时计数法和电子式定时计数法。传统的电机转速检测多采用测速发电机或光电数字脉冲编码器,也有采用电磁式(利用电磁感应原理或可变磁阻的霍尔元件等)、电容式(对高频振荡进行幅值调制或频率调制)等,还有一些特殊的测速器是利用置于旋转体内的放射性材料来发生脉冲信号.其中应用最广的是光电式,光电式测系统具有低惯性、低噪声、高分辨率和高精度的优点.加之激光光源、光栅、光学码盘、CCD 器件、光导纤维等的相继出现和成功应用,使得光电传感器在检测和控制领域得到了广泛的应用。而采用光电传感器的电机转速测量系统测量准确度高、采样速度快、测量范围宽和测量精度与被测转速无关等优点,具有广阔的应用前景。
电磁组竞赛车模 路径检测设计参考方案 (竞赛秘书处 2010-1,版本1.0) 一、 前言 第五届全国大学生智能汽车竞赛新增加了电磁组比赛。竞赛车模需要能够通过自动识别赛道中心线位置处由通有100mA交变电流的导线所产生的电磁场进行路径检测。除此之外在赛道的起跑线处还有永磁铁标志起跑线的位置。具体要求请参阅《第五届智能汽车竞赛细则》技术文档。 本文给出了一种简便的交变磁场的检测方案,目的是使得部分初次参加比赛的队伍能够尽快有一个设计方案,开始制作和调试自己的车模。本方案通过微型车模实际运行,证明了它的可行性。微型车模运行录像参见竞赛网站上视频文件。 二、设计原理 1、导线周围的电磁场 根据麦克斯韦电磁场理论,交变电流会在周围产生交变的电磁场。智能汽车竞赛使用路径导航的交流电流频率为20kHz,产生的电磁波属于甚低频(VLF)电磁波。甚低频频率范围处于工频和低频电磁破中间,为3kHz~30kHz,波长为100km~10km。如下图所示: 图1:电流周围的电磁场示意图 导线周围的电场和磁场,按照一定规律分布。通过检测相应的电磁场的强度和方向可以反过来获得距离导线的空间位置,这正是我们进行电磁导航的目的。 由于赛道导航电线和小车尺寸l远远小于电磁波的波长λ,电磁场辐射能量很小(如果天线的长度l远小于电磁波长,在施加交变电压后,电磁波辐射功率正比于天线长度的四次方),所以能够感应到电磁波的能量非常小。为此,我们将导线周围变化的磁场近似缓变的磁场,按照检测静态磁场的方法获取导线周围的磁场分布,从而进行位置检测。 由毕奥-萨伐尔定律知:通有稳恒电流I长度为L的直导线周围会产生磁场,距离导线距离为r处P点的磁感应强度为:
阅读报告 生物传感器 教学单位:机电工程学院 专业名称:机械设计制造及其自动化 学号: 学生姓名: 指导教师: 指导单位:机电工程学院 完成时间: 电子科技大学中山学院教务处制发
生物传感器 摘要 传感器(英文名称:transducer/sensor)是一种检测装置,能感受到被测量的信息,并能将感受到的信息,按一定规律变换成为电信号或其他所需形式的信息输出,以满足信息的传输、处理、存储、显示、记录和控制等要求。 传感器的特点包括:微型化、数字化、智能化、多功能化、系统化、网络化。它是实现自动检测和自动控制的首要环节。传感器的存在和发展,让物体有了触觉、味觉和嗅觉等感官,让物体慢慢变得活了起来。通常根据其基本感知功能分为热敏元件、光敏元件、气敏元件、力敏元件、磁敏元件、湿敏元件、声敏元件、放射线敏感元件、色敏元件和味敏元件等十大类。 生物传感器(biosensor),是一种对生物物质敏感并将其浓度转换为电信号进行检测的仪器。是由固定化的生物敏感材料作识别元件(包括酶、抗体、抗原、微生物、细胞、组织、核酸等生物活性物质)、适当的理化换能器(如氧电极、光敏管、场效应管、压电晶体等等)及信号放大装置构成的分析工具或系统。生物传感器具有接受器与转换器的功能。 关键词:传感器生物传感器
目录 1 生物传感器 (1) 1.1生物传感器简介 (1) 2 生物传感器的介绍 (2) 2.1组成结构及工作原理 (2) 2.2技术特点 (2) 2.3国内外应用发展情况及应用案例 (3) 2.3.1国内应用发展 (3) 2.3.2国外应用发展 (3) 2.3.3应用案例 (4) 参考文献 (6)
4第四章传感器的使 用
第四章传感器使用基础 1、振动传感器 现场振动测试采用的传感器一般有非接触式电涡流传感器、速度传感器、加速度传感器和复合传感器(它是由一个非接触式传感器和一个惯性传感器组成)四种。每一种传感器都有它们固有频响特性,其决定了各自的工作范围。如果采用的传感器在超出其线性频响区域工作时,测量得到的读数会产生较大的偏差。下表列出了振动测量中常用的一些传感器的性能和适用范围及优、缺点等。 表1—1 常用的振动传感器及其性能和适应范围
1.1、振动传感器的构成及工作原理 振动传感器是将机械振动量转换为成比例的模拟电气量的机电转换装置。 传感器至少有 机械量的接收和 机电量的转换二 个单元构成。机 械接收单元感受 机械振动,但只 接收位移、速 度、加速度中的 一个量;机电转换单元将接收到的机械量转换成模拟电气量,如电荷、电动势、电阻、电感、电容等;另外,还配有检测放大电路或放大器,将模拟电气量转换、放大为后续分析仪器所需要的电压信号,振动监测中的所有振动信息均来自于此电压信号。 1.2、振动传感器的类型 振动传感器的种类很多,且有不同的分类方法。按工作原理的不同,可分为电涡流式、磁电式(电动式)、压电式;按参考坐标的不同,可分为相对式与绝对式(惯性式);按是否与被测物体接触,可分为接触式与非接触式;按测量的振动参数的不同,可分为位移、速度、加速度传感器;以及由电涡流式传感器和惯性式传感器组合而成的复合式传感器,等等。 在现场实际振动检测中,常用的传感器有磁电式速度传感器(其中又以绝对式应用较多)、压电式加速度传感器和电涡流式位移传感器。其中,加速度传感器应用最广,而大型旋转机械转子振动的测量几乎都是涡流式传感器。2.电动力式振动速度传感器的工作原理
电磁场与电磁波习题目解答选
《电磁场与电磁波》(陈抗生)习题解答 第一章 引言——波与矢量分析 1.1 . ,,/)102102cos(102 6300p y v k f E m V x t y y E E 相速度相位常数度,频率波的传播方向,波的幅的方向,,求矢量设 --?+?==ππ 解:m /V )x 102t 102cos(10y y E z E y E x E E 26300y 0z 0y 0 x --?π+?π==++= ∴ 矢量E 的方向是沿Y 轴方向,波的传播方向是-x 方向; 波的幅度 m /V 10E E 3y -== 。 s /m 10102102k V ;102k ; MHZ 1HZ 1021022f 82 6 P 2 66=?π?π=ω=?π===π ?π=πω=-- 1.2 写出下列时谐变量的复数表示(如果可能的话) ) 6 sin()3 sin()()6(cos 1)()5() 2 120cos(6)()4(cos 2sin 3)()3(sin 8)()2() 4 cos(6)()1(π ωπ ωωπ πωωωπ ω+ + =-=-=-=-=+ =t t t U t t D t t C t t t A t t I t t V (1)解: 4/)z (v π=? j 23234 sin j 64cos 6e 6V 4 j +=π +π==π ∴ (2)解:)2 t cos(8)t (I π-ω-= 2 )z (v π- =? j 8e 8I j 2 =-= π-∴
(3)解:) t cos 13 2t sin 13 3( 13)t (A ω- ω= j 32e 13A 2)z () 2t cos(13)t (A 13 3 cos ) 2 (j v --==π - θ=?∴π -θ+ω==θπ-θ则则令 (4)解:)2 t 120cos(6) t (C π -π= j 6e 6C 2 j -==∴π (5)(6)两个分量频率不同,不可用复数表示 1.3由以下复数写出相应的时谐变量] ) 8.0exp(4)2 exp(3)3() 8.0exp(4)2(1)1(j j C j C j C +==+=π (1)解: t sin t cos j t sin j t cos )t sin j t )(cos j 1(e )j 1(t j ω-ω+ω+ω=ω+ω+=+ω t sin t cos )Ce (RE )t (C t j ω-ω==∴ω (2)解:)8.0t cos(4)e e 4(RE )Ce (RE ) t (C t j 8.0j t j +ω===ωω (3)解:)8.0t (j ) 2t (j t j 8 .0j j t j e 4e 3e )e 4e 3(Ce 2 +ωπ+ωωω+=+=π 得:)t cos(3)8.0t cos(4)8.0t cos(4)2 t cos(3)Ce (RE )t (C t j ω-+ω=+ω+π +ω==ω 1.4 ] Re[, )21(,)21(000000* *????++--=+++=B A B A B A B A z j y j x B z j y j x A ,,,求:假定 解:1B A B A B A B A z z y y x x -=++= ?
课题名称:传感器测量系统的设计指导教师:秦建中 班级:自动化1301 姓名:刘洒 学号: 2013001575 日期:2016年1月20日
《模拟电子技术》课程设计报告 传感器测量系统的设计 摘要 传感器检测系统这一概念是传感技术发展到一定阶段的产物。检测系统是传感器与测量仪表、变换装置等的有机组合。在工程实际中,需要有传感器与多台测量仪表有机地组合起来,构成一个整体,才能完成信号的检测,这样便形成了检测系统。随着计算机技术及信息处理技术的不断发展,检测系统所涉及的内容也不断得以充实。在现代化的生产过程中,过程参数的检测都是自动进行的,即检测任务是由检测系统自动完成的,因此研究和掌握检测系统的构成及原理十分必要。本次论文需要设计一个放大器系统,当电阻值变化±1%时,放大电路能够产生±10V的输出电压。要求偏差为0时输出为0,偏差为1%时输出为10V,偏差为-1%时输出为-10V,误差不超过±5%。 关键词:放大器,传感器,检测 The design about sensor measuring system Abstract Sensor system, the concept is sensing technology has developed to a certain stage of the product. Detection system is the sensor and the measuring instrument, the organic combination of the conversion device. In practical engineering, sensor and measurement instrument of organic combination, constitute a whole, to complete signal detection, thus forming the detection system. With the development of computer technology and information processing technology, detection system involves content also continues to enrich. In modern production process, the process parameters of detection is done automatically, the detection task is done automatically detected by the system. Therefore, the study and master the detection The constitute and principle of the system is very necessary. This paper needs to design an amplifier system, when the resistance value change + 1%, amplifying circuit to generate the output voltage of the + 10V. Requirement deviation is 0 when the output is 0, the deviation is 1% output of 10V, the deviation is 1% output to - 10V, the error is more than + 5%. Key words: amplifier, sensor, detection
1、已知一等强度梁测力系统, R x 为电阻应变片,应变片灵敏系数 K=2,未 受应变时,R < = 100 ?。当试件受力 F 时,应变片承受平均应变 £ = 1000卩m/m , 求: (1) 应变片电阻变化量 ? R <和电阻相对变化量? R x /R x 。 (2) 将电阻应变片 R <置于单臂测量电桥,电桥电源电压为直流 3V, 求电桥输出电压及电桥非线性误差。 (3) 若要使电桥电压灵敏度分别为单臂工作时的两倍和四倍,应采取 解: (1) RX K R X R X K R X 2 1000 100 0.2() 化时,电桥输出电压为 U O (3)要使电桥电压灵敏度为单臂工作时的 2倍,则应该在等强度梁的正反面对应贴上两 个相同的应变片,一个受拉应变,一个受压应变,接入电桥相邻桥臂,形成半桥差动电桥, 且取其他桥臂电阻也为 Rx 。 1 R X 此时,U o — E - 0.003(V),r L 0 2 R X 要使电桥电压灵敏度为单臂工作时的 4倍,则应该在等强度梁的正反面对应贴上四个相 同的应变片,2个受拉应变,2个受压应变,形成全桥差动电桥。 2、有一个以空气为介质的变面积型平板电容传感器(见下图) 。其中 a=16mm,b=24mm,两极板间距为4mm 。一块极板分别沿长度和宽度方向在原始位置 上平移了 5mm ,求: R X R X 0.2 100 0.2% (2)将电阻应变片 Rx 置于单臂测量电桥,取其他桥臂电阻也为 Rx 。当Rx 有? Rx 的变 R X R X U O (云r i )E 3 (100 0.2 丄) 200 0.2 2 0.0015(V) 非线性误差: r L R X /2R X 1 R X /2R X 100% 0.1% 此时,U o R X R X 0.006(V),r L 0
电磁场与电磁波试题及答案
1.麦克斯韦的物理意义:根据亥姆霍兹定理,矢量场的旋度和散度都表示矢量场的源。麦克斯韦方程表明了电磁场和它们的源之间的全部关系:除了真实电流外,变化的电场(位移电流)也是磁场的源;除电荷外,变化的磁场也是电场的源。 1. 写出非限定情况下麦克斯韦方程组的微分形式,并简要说明其物理意义。 2.答非限定情况下麦克斯韦方程组的微分形式为,,0,D B H J E B D t t ρ????=+ ??=-??=??=??,(3分)(表明了电磁场和它们的源之间的全部关系除了真实电流外,变化的电场(位移电流)也是磁场的源;除电荷外,变化的磁 场也是电场的源。 1.简述集总参数电路和分布参数电路的区别: 2.答:总参数电路和分布参数电路的区别主要有二:(1)集总参数电路上传输的信号的波长远大于传输线的几何尺寸;而分布参数电路上传输的信号的波长和传输线的几何尺寸可以比拟。(2)集总参数电路的传输线上各点电压(或电流)的大小与相位可近似认为相同,无分布参数效应;而分布参数电路的传输线上各点电压(或电流)的大小与相位均不相同,呈现出电路参数的分布效应。 1.写出求解静电场边值问题常用的三类边界条件。 2.答:实际边值问题的边界条件可以分为三类:第一类是整个边界上的电位已知,称为“狄利克莱”边界条件;第二类是已知边界上的电位法向导数,称为“诺依曼”边界条件;第三类是一部分边界上电位已知,而另一部分上的电位法向导数已知,称为混合边界条件。 1.简述色散效应和趋肤效应。 2.答:在导电媒质中,电磁波的传播速度(相速)随频率改变的现象,称为色散效应。在良导体中电磁波只存在于导体表面的现象称为趋肤效应。 1.在无界的理想媒质中传播的均匀平面波有何特性?在导电媒质中传播的均匀平面波有何特性? 2. 在无界的理想媒质中传播的均匀平面波的特点如下:电场、磁场的振幅不随传播距离增加而衰减,幅度相差一个实数因子η(理想媒质的本征阻抗);时间相位相同;在空间相互垂直,与传播方向呈右手螺旋关系,为TEM 波。 在导电媒质中传播的均匀平面波的特点如下:电磁场的振幅随传播距离增加而呈指数规律衰减;电、磁场不同相,电场相位超前于磁场相位;在空间相互垂直,与传播方向呈右手螺旋关系,为色散的TEM 啵。 1. 写出时变电磁场在1为理想导体与2为理想介质分界面时的边界条件。 2. 时变场的一般边界条件 2n D σ=、20t E =、2t s H J =、20n B =。 (或矢量式2n D σ=、20n E ?=、 2s n H J ?=、20n B =) 1. 写出矢量位、动态矢量位与动态标量位的表达式,并简要说明库仑规范与洛仑兹规范的意义。 2. 答矢量位,0B A A =????=;动态矢量位A E t ??=-?- ?或A E t ??+=-??。库仑规范与洛仑兹规范的作用都 是限制A 的散度,从而使A 的取值具有唯一性;库仑规范用在静态场,洛仑兹规范用在时变场。 1. 简述穿过闭合曲面的通量及其物理定义 2. s A ds φ=??? 是矢量A 穿过闭合曲面S 的通量或发散量。若Ф> 0,流出S 面的通量大于流入的通量,即通量由S 面内向外扩散,说明S 面内有正源若Ф< 0,则流入S 面的通量大于流出的通量,即通量向S 面内汇集,说明S 面内有负源。若Ф=0,则流入S 面的通量等于流出的通量,说明S 面内无源。 1. 证明位置矢量 x y z r e x e y e z =++ 的散度,并由此说明矢量场的散度与坐标的选择无关。 2. 证明在直角坐标系里计算 ,则有 ()()x y z x y z r r e e e e x e y e z x y z ? ? ?????=++?++ ?????? 3x y z x y z ???= ++=??? 若在球坐标系里计算,则 23 22 11()()()3r r r r r r r r r ????= ==??由此说明了矢量场的散度与坐标的选择无关。
汽车传感器通用测试系统 传感器测试系统的特点: 1.模块化设计,同一套测试系统可以通过更换模块的方式完成多种类型的汽车传感器测试; 2.模块和母台采用快插式电气连接,软件自动识别插入模块,模块更换无技术难度,操作简便; 3.系统集成了打标功能,减少了操作动作和操作时间(可以选择热印和激光两种形式) 4.测试、打标合计时间小于10S,测试速度能够满足生产线生产要求; 5.核心部件采用NI(美国国家仪器公司)硬件,测试精度高、重复性好,GR&R测试指标良好; 6.具有作业记录、样件校验测试和防错机制等,便于生产质量管理; 7.完善的本地化售后服务网络,服务方便、快捷。 汽车传感器简介
汽车传感器是汽车电子控制系统的信息源和关键部件,也是汽车电子技术领域研究的核心内容之一。目前,一辆普通轿车大约安装了几十只到上百只传感器,而豪华轿车上的传感器数量多达二百余只。 ·发动机控制系统传感器包括温度传感器、压力传感器、位置和转速传感器、流量传感器、气体浓度传感器和爆震传感器等。 ·底盘控制传感器是用于变速器控制系统、悬架控制系统、动力转向系统、制动防抱死系统等底盘控制系统中的传感器。 --自动变速器系统传感器; --制动防抱死系统用传感器; -- 悬架系统用传感器; --动力转向系统用传感器; ·车身控制用传感器主要用于提高汽车的安全性、可靠性和舒适性等。主要包括以下几种:-- 用于自动空调系统的温度传感器、湿度传感器、风量传感器、日照传感器等; --用于安全气囊系统中的加速度传感器; --用于门锁控制的车速传感器; --用于亮度自动控制的光传感器等。 随着GPS/GIS(全球定位系统和地理信息系统)导航系统在汽车上的应用,导航用传感器得到了迅速的发展。导航系统用传感器主要包括:确定汽车行驶方向的罗盘传感器、陀螺仪和车速传感器、方向盘转角传感器等。 汽车中传感器的日渐增加,使对汽车传感器的高效率、高精度测试成为了汽车测试界面临的挑战。以下介绍的泛华测控汽车传感器通用测试系统为汽车传感器测试提供了一种全新的测试理念和方法,并已成功应用在现实中。 系统概述 泛华测控汽车传感器测试系统采用美国国家仪器(NI)公司的虚拟仪器技术,即基于软件LabWindows/CVI或LabVIEW开发平台,测试硬件由基于PXI总线标准的机箱和相应模块及其它配件等组成。 本汽车传感器通用测试系统主要用于传感器生产线终检工位。系统采用台式结构,适于生产线上操作人 员站立操作。 本测试系统采用可更换测试模块方式,同一套工作台可以测试曲轴、凸轮轴、轮速等传感器。更换相应的测试模块即可测试不同的传感器。在各个测试模块上安装有气缸、旋转电
《传感器与传感器技术》计算题 解题指导(供参考) 第1章 传感器的一般特性 1-5 某传感器给定精度为2%F·S,满度值为50mV ,零位值为10mV ,求可能出现的最大误差(以mV 计)。当传感器使用在满量程的1/2和1/8时,计算可能产生的测量百分误差。由你的计算结果能得出什么结论? 解:满量程(F ?S )为50~10=40(mV) 可能出现的最大误差为: m =40 2%=0.8(mV) 当使用在1/2和1/8满量程时,其测量相对误差分别为: %4%10021408.01=??=γ %16%10081 408 .02=??=γ 1-6 有两个传感器测量系统,其动态特性可以分别用下面两个微分方程描述,试求这两个系统的时间常数和静态灵敏度K 。 (1) T y dt dy 5105.1330 -?=+ 式中,y 为输出电压,V ;T 为输入温度,℃。 (2) x y dt dy 6.92.44 .1=+ 式中,y ——输出电压,V ;x ——输入压力,Pa 。 解:根据题给传感器微分方程,得 (1) τ=30/3=10(s), K =1.5105/3=0.5105 (V/℃); (2) τ=1.4/4.2=1/3(s), K =9.6/4.2=2.29(V/Pa)。 1-7 设用一个时间常数=0.1s 的一阶传感器检测系统测量输入为x (t )=sin4t +0.2sin40t 的信号,试求其输出y (t )的表达式。设静态灵敏度K =1。 解 根据叠加性,输出y (t )为x 1(t )=sin4t 和x 2(t )= 0.2sin40t 单独作用时响应y 1(t )和y 2(t )的叠加,即y (t )= y 1(t )+ y 2(t )。 由频率响应特性:
现场传感器接线说明 IMB standardization office【IMB 5AB- IMBK 08- IMB 2C】
1)室外温湿度传感器 现场使用的室外温湿度传感器主要有两个型号 QFA3160 电源:24VDC;输出:0-10V QFA3171电源:24VDC;输出:4-20mA 按上图片可以修改传感器的信号类型和量程范围,信号类型出场都是调试好的,基本不用改。量程范围根据当地气候,一般情况用R3档。 上图为传感器接线图(需要注意QFA3171温度和湿度需要单独供电)。 调试的时候需要检查 1.传感器供电(一般为24VDC,特殊类型需查看说明书)。 2.传感器和模块上的接线(电压和电流型在AI模块上的接线不同)。 3.传感器量程;信号类型是否和硬件组态中一致。 4.改完量程一定要盖上传感器的盖子才能正确度数 5.程序中的FC105的上下限应与计算值对应。 2)水管温度传感器 现场使用的室外温湿度传感器主要有两个型号 PT100和LG-Ni1000;PT100为温度0度时电阻为100欧姆的铂电阻,LG-Ni1000是指温度0度是电阻为1000欧姆的镍电阻。 接线方式分为2线制和3线制。3线制的接法可以消除线组对传感器测量数值的影响 传感器端只有两个段子,3线制接线方法为将其中两个线接到传感器一个段子上,模块端分别接在S-和M-上,剩余的一根线接到M+上;2线制的接法为将两根线分别接到传感器两个段子上,模块端分别接在M+和M-,同时将模块端S-和M-短接。
硬件组态的时候,如果选择的是PT100Sta.,那么程序中除以10,如果选择的是PT100Cl.,就要除100。 3)流量传感器 流量传感器型号:DWM2000 电源:24VDC 输出:4-20mA 接线方法和设置如下图: 拨码的计算 调试的时候需要检查 1.传感器供电(一般为24VDC,特殊类型需查看说明书)。 2.传感器和模块上的接线。 3.传感器量程;信号类型是否和硬件组态中一致。 4.必须在不开水泵,同时保证管道中液体静止时才能调零。 5.程序中的FC105的上下限应与计算值对应。 4)西门子压力传感器 型号:QBE2002 电源:24VDC 输出:0-10V 接线方法: 现场很多西门子传感器线的颜色为棕、蓝、白与接线图上线色不同,但是还是按照棕—供电、白—GND、蓝—输出信号的接法。 5)瑞士Huba压力传感器
第一章 一、矢量代数 A ?B =AB cos θ A B ?= AB e AB sin θ A ?(B ?C ) = B ?(C ?A ) = C ?(A ?B ) ()()()C A C C A B C B A ?-?=?? 二、三种正交坐标系 1. 直角坐标系 矢量线元x y z =++l e e e d x y z 矢量面元=++S e e e x y z d dxdy dzdx dxdy 体积元d V = dx dy dz 单位矢量的关系?=e e e x y z ?=e e e y z x ?=e e e z x y 2. 圆柱形坐标系 矢量线元=++l e e e z d d d dz ρ?ρρ?l 矢量面元=+e e z dS d dz d d ρρ?ρρ? 体积元dz d d dV ?ρρ= 单位矢量的关系?=??=e e e e e =e e e e z z z ρ??ρ ρ? 3. 球坐标系 矢量线元d l = e r d r + e θ r d θ + e ? r sin θ d ? 矢量面元d S = e r r 2sin θ d θ d ? 体积元 ?θθd d r r dV sin 2= 单位矢量的关系?=??=e e e e e =e e e e r r r θ? θ??θ 三、矢量场的散度和旋度 1. 通量与散度 =?? A S S d Φ 0 lim ?→?=??=??A S A A S v d div v 2. 环流量与旋度 =??A l l d Γ max n rot =lim ?→???A l A e l S d S 3. 计算公式 ????= ++????A y x z A A A x y z 11()z A A A z ?ρρρρρ?????= ++????A 22111()(s i n )s i n s i n ????= ++????A r A r A A r r r r ? θ θθθθ? x y z ? ????= ???e e e A x y z x y z A A A 1z z z A A A ρ?ρ?ρρ?ρ? ?? ??= ???e e e A
传感器与检测技术考试试题 一、填空:(20分) 1,测量系统的静态特性指标主要有线性度、迟滞、重复性、分辨力、稳定性、温度稳定性、各种抗干扰稳定性等。(2分) 2.霍尔元件灵敏度的物理意义是表示在单位磁感应强度相单位控制 电流时的霍尔电势大小。 4.热电偶所产生的热电势是两种导体的接触电势和单一导体的温差 电势组成的,其表达式为Eab (T ,To )=T B A T T B A 0d )(N N ln )T T (e k 0。 在热电偶温度补偿中补偿导线法(即冷端延长线法)是在连接导线和热电偶之间,接入延长线,它的作用是将热电偶的参考端移至离热源较远并且环境温度较稳定的地方,以减小冷端温度变化的影响。 5.压磁式传感器的工作原理是:某些铁磁物质在外界机械力作用下, 其内部产生机械压力,从而引起极化现象,这种现象称为正压电效应。相反,某些铁磁物质在外界磁场的作用下会产生机械变形,这种现象称为负压电效应。(2分) 6. 变气隙式自感传感器,当街铁移动靠近铁芯时,铁芯上的线圈电 感量(①增加②减小③不变)(2分) 7. 仪表的精度等级是用仪表的(①相对误差②绝对误差③引用误差)来表示的(2分) 8. 电容传感器的输入被测量与输出被测量间的关系,除(①变面积型②变极距型③变介电常数型)外是线性的。(2分) 1、变面积式自感传感器,当衔铁移动使磁路中空气缝隙的面积 增大时,铁心上线圈的电感量(①增大,②减小,③不变)。 2、在平行极板电容传感器的输入被测量与输出电容值之间的关 系中,(①变面积型,②变极距型,③变介电常数型)是线性的关系。 3、在变压器式传感器中,原方和副方互感M 的大小与原方线圈 的匝数成(①正比,②反比,③不成比例),与副方线圈的匝数成(①正比,②反比,③不成比例),与回路中磁阻成(①正比,②反比,③不成比例)。 4、传感器是能感受规定的被测量并按照一定规律转换成可用输
1.麦克斯韦的物理意义:根据亥姆霍兹定理,矢量场的旋度和散度都表示矢量场的源。麦克斯韦方程表明了电磁场和它们的源之间的全部关系:除了真实电流外,变化的电场(位移电流)也是磁场的源;除电荷外,变化的磁场也是电场的源。 1. 写出非限定情况下麦克斯韦方程组的微分形式,并简要说明其物理意义。 2.答非限定情况下麦克斯韦方程组的微分形式为,,0,D B H J E B D t t ρ????=+ ??=-??=??=??,(3分)(表明了电磁场和它们的源之间的全部关系除了真实电流外,变化的电场(位移电流)也是磁场的源;除电荷外,变化的磁 场也是电场的源。 1.简述集总参数电路和分布参数电路的区别: 2.答:总参数电路和分布参数电路的区别主要有二:(1)集总参数电路上传输的信号的波长远大于传输线的几何尺寸;而分布参数电路上传输的信号的波长和传输线的几何尺寸可以比拟。(2)集总参数电路的传输线上各点电压(或电流)的大小与相位可近似认为相同,无分布参数效应;而分布参数电路的传输线上各点电压(或电流)的大小与相位均不相同,呈现出电路参数的分布效应。 1.写出求解静电场边值问题常用的三类边界条件。 2.答:实际边值问题的边界条件可以分为三类:第一类是整个边界上的电位已知,称为“狄利克莱”边界条件;第二类是已知边界上的电位法向导数,称为“诺依曼”边界条件;第三类是一部分边界上电位已知,而另一部分上的电位法向导数已知,称为混合边界条件。 1.简述色散效应和趋肤效应。 2.答:在导电媒质中,电磁波的传播速度(相速)随频率改变的现象,称为色散效应。在良导体中电磁波只存在于导体表面的现象称为趋肤效应。 1.在无界的理想媒质中传播的均匀平面波有何特性?在导电媒质中传播的均匀平面波有何特性? 2. 在无界的理想媒质中传播的均匀平面波的特点如下:电场、磁场的振幅不随传播距离增加而衰减,幅度相差一个实数因子η(理想媒质的本征阻抗);时间相位相同;在空间相互垂直,与传播方向呈右手螺旋关系,为TEM 波。 在导电媒质中传播的均匀平面波的特点如下:电磁场的振幅随传播距离增加而呈指数规律衰减;电、磁场不同相,电场相位超前于磁场相位;在空间相互垂直,与传播方向呈右手螺旋关系,为色散的TEM 啵。 1. 写出时变电磁场在1为理想导体与2为理想介质分界面时的边界条件。 2. 时变场的一般边界条件 2n D σ=、20t E =、2t s H J =、20n B =。 (或矢量式2n D σ=、20n E ?=、 2s n H J ?=、20n B =) 1. 写出矢量位、动态矢量位与动态标量位的表达式,并简要说明库仑规范与洛仑兹规范的意义。 2. 答矢量位,0B A A =????=;动态矢量位A E t ??=-?- ?或A E t ??+=-??。库仑规范与洛仑兹规范的作用都 是限制A 的散度,从而使A 的取值具有唯一性;库仑规范用在静态场,洛仑兹规范用在时变场。 1. 简述穿过闭合曲面的通量及其物理定义 2. s A ds φ=??? 是矢量A 穿过闭合曲面S 的通量或发散量。若Ф> 0,流出S 面的通量大于流入的通量,即通 量由S 面内向外扩散,说明S 面内有正源若Ф< 0,则流入S 面的通量大于流出的通量,即通量向S 面内汇集,说明S 面内有负源。若Ф=0,则流入S 面的通量等于流出的通量,说明S 面内无源。 1. 证明位置矢量 x y z r e x e y e z =++ 的散度,并由此说明矢量场的散度与坐标的选择无关。 2. 证明在直角坐标系里计算 ,则有 ()()x y z x y z r r e e e e x e y e z x y z ? ? ?????=++?++ ?????? 3x y z x y z ???= ++=??? 若在球坐标系里计算,则 23 22 11()()()3r r r r r r r r r ????===??由此说明了矢量场的散度与坐标的选择无关。 1. 在直角坐标系证明0A ????= 2.
第二章 传感器与测量系统的一般特性 2-1:有两个传感器测量系统,其动态特性可以分别用下面两个微分方程描述,试求这两个系统的时间常数和静态灵敏度K 。 (1)T y dt dy 5105.1330-?=+ 式中y :输出电压(V ),T :输入温度(℃) (2)x y dt dy 6.92.44.1=+ 式中y :输出电压(mV ),x :输入压力(pa ) 2-2: 已知一热电偶的时间常数τ=10s ,如果用它来测量一台炉子的温度,炉内温度在540℃至500℃之间接近正弦曲线波动,周期为80s ,静态灵敏度K=1。试求该热电偶输出的最大值和最小值。以及输入与输出之间的相位差和滞后时间。 2-3: 某加速度传感器的动态特性可用如下的微分方程来描述: x y t y t y 1010322100.111025.2d d 100.3d d ?=?+?+ 式中y :输出电荷量(pC )x :输入加速度值(m/s 2)试确定该传感器的ω0、ξ和k 的大小。 2-4:某压力传感器的校准数据如下表所示,试分别用端点连线法和最小二乘法求非线性误差。并计算迟滞和重复性误差;写出端点连线法和最小二乘法拟合直线方程。 2-5:一只二阶力传感器系统,已知其固有频率f 0=800Hz ,阻尼比ξ=0.14,现用它作工作频率f =400Hz 的正弦变化的外力测试时,其幅值比A(ω)和相位角φ(ω)各为多少;若该传感器的阻尼比ξ=0.7时,其A(ω)和φ(ω)又将如何变化? 2-6 设有两只力传感器均可作为二阶系统来处理,其固有振荡频率分别为800Hz 和1.2kHz ,阻尼比均为0.4。今欲测量频率为400Hz 正弦变化的外力,应选用哪一
第1章概述 1.什么是传感器? 传感器定义为能够感受规定的被测量并按照一定规律转换成可用输出信号的器件和装置,通常由敏感元件和转换元件组成。 1.2传感器的共性是什么? 传感器的共性就是利用物理规律或物质的物理、化学、生物特性,将非电量(如位移、速度、加速度、力等)输入转换成电量(电压、电流、电容、电阻等)输出。 1.3传感器由哪几部分组成的? 由敏感元件和转换元件组成基本组成部分,另外还有信号调理电路和辅助电源电路。 1.4传感器如何进行分类? (1)按传感器的输入量分类,分为位移传感器、速度传感器、温度传感器、湿度传感器、压力传感器等。(2)按传感器的输出量进行分类,分为模拟式和数字式传感器两类。(3)按传感器工作原理分类,可以分为电阻式传感器、电容式传感器、电感式传感器、压电式传感器、磁敏式传感器、热电式传感器、光电式传感器等。(4)按传感器的基本效应分类,可分为物理传感器、化学传感器、生物传感器。(5)按传感器的能量关系进行分类,分为能量变换型和能量控制型传感器。(6)按传感器所蕴含的技术特征进行分类,可分为普通型和新型传感器。 1.5传感器技术的发展趋势有哪些? (1)开展基础理论研究(2)传感器的集成化(3)传感器的智能化(4)传感器的网络化(5)传感器的微型化 1.6改善传感器性能的技术途径有哪些? (1)差动技术(2)平均技术(3)补偿与修正技术(4)屏蔽、隔离与干扰抑制 (5)稳定性处理 第2章传感器的基本特性 2.1什么是传感器的静态特性?描述传感器静态特性的主要指标有哪些? 答:传感器的静态特性是指在被测量的各个值处于稳定状态时,输出量和输入量之间的关系。主要的性能指标主要有线性度、灵敏度、迟滞、重复性、精度、分辨率、零点漂移、温度漂移。 2.2传感器输入-输出特性的线性化有什么意义?如何实现其线性化? 答:传感器的线性化有助于简化传感器的理论分析、数据处理、制作标定和测试。常用的线性化方法是:切线或割线拟合,过零旋转拟合,端点平移来近似,多数情况下用最小二乘法来求出拟合直线。 2.3利用压力传感器所得测试数据如下表所示,计算其非线性误差、迟滞和重复性误差。设压力为0MPa 时输出为0mV,压力为0.12MPa时输出最大且为16.50mV. 非线性误差略 正反行程最大偏差?Hmax=0.1mV,所以γH=±?Hmax0.1100%=±%=±0.6%YFS16.50 重复性最大偏差为?Rmax=0.08,所以γR=±?Rmax0.08=±%=±0.48%YFS16.5 2.4什么是传感器的动态特性?如何分析传感器的动态特性? 传感器的动态特性是指传感器对动态激励(输入)的响应(输出)特性,即输出对随时间变化的输入量的响应特性。 传感器的动态特性可以从时域和频域两个方面分别采用瞬态响应法和频率响应法来分析。瞬态响应常采用阶跃信号作为输入,频率响应常采用正弦函数作为输入。
一、填空题 ▲1.矢量的通量物理含义是矢量穿过曲面的矢量线的总和; 散度的物理意义是矢量场中任意一点处通量对体积的变化率; 散度与通量的关系是散度一个单位体积内通过的通量。 2.散度在直角坐标系z A y A x A A div Z Y X ??+??+??=散度在圆柱坐标系z A A r r rA r A div Z r ??+??+??=??1)(1 ▲3,矢量函数的环量定义 ??=l l d A C ;旋度的定义MAX l S l d A rot ??=?→?lim 0; 二者的关系 ???=???l S l d A S d A )(;旋度的物理意义:最大环量密度和最大环量密度方向。 4.旋度在直角坐标系下的表达式)()()(y A x A e x A z A e z A y A e z y z z x y y Z x ??-??+??-??+??-?? ▲5.梯度的物理意义:函数最大变化率和最大变化率方向 ; 等值面、方向导数与梯度的关系是:方向导数是标量场中某一点沿某一方向等值面的变化率,梯度是方向导数的最大值。 6.用方向余弦cos α 、cos β、cos γ写出直角坐标系中单位矢量l e 的表达式γβαcos cos cos z y x l e e e e ++= ▲7.直角坐标系下方向导数l u ??的数学表达式 γβαcos cos cos z u y u x u ??+??+??;梯度γβαcos cos cos z y x e e e ++ ▲8.亥姆霍茨定理表述在有限区域的任一矢量场由它的散度,旋度以及边界条件唯一地确定; 说明的问题是要确定一个矢量或一个矢量描述的场,须同时确定其散度和旋度 ▲9.麦克斯韦方程组的积分表达式分别为 1.?=?S Q S d D ;2.S d t B l d E l S ????-=?;3.0=??S S d B ;4.?????+=?S l S d t D J l d H )( 其物理描述分别为1.电荷是产生电场的通量源 2.变换的磁场是产生电场的漩涡源 3.磁感应强度的散度为0,说明磁场不可能由通量源产生; 4.传导电流和位移电流产生磁场,他们是产生磁场的漩涡源。 ▲10.麦克斯韦方程组的微分表达式分别为 1.ρ=??D ;2.t B E ??-=??; 3.0=??B ; 4.t D J H ??+=?? 其物理描述分别为同第九题 11.时谐场是激励源按照单一频率随时间作正弦变化时所激发的也随时间按照正弦变化的场; 一般采用时谐场来分析时变电磁场的一般规律,是因为1.任何时变周期函数都可以用正弦函数表示的傅里叶级数来描述 2.在线性条件下可以使用叠加原理 ▲12.坡印廷矢量的数学表达式 H E S ?=; 其物理意义 电磁能量在空间的能流密度; 表达式??S S d H E )(的物理意义单位时间内穿出闭合曲面S 的电磁能流大小 ▲13.电介质的极化是指在外电场作用下,电介质中出现有序排列的电偶极子,表面上出现束缚电荷的现象。 两种极化现象分别是 位移极化(无极分子的极化) ;转向极化(有极分子的极化)。 产生的现象分别有 1.电偶极子有序排列 2.表面上出现束缚电荷 3.影响外电场分布; 描述电介质极化程度或强度的物理量是极化矢量P