机械原理大作业
——10A
班级:机械113
姓名:姚小龙
学号:201106263
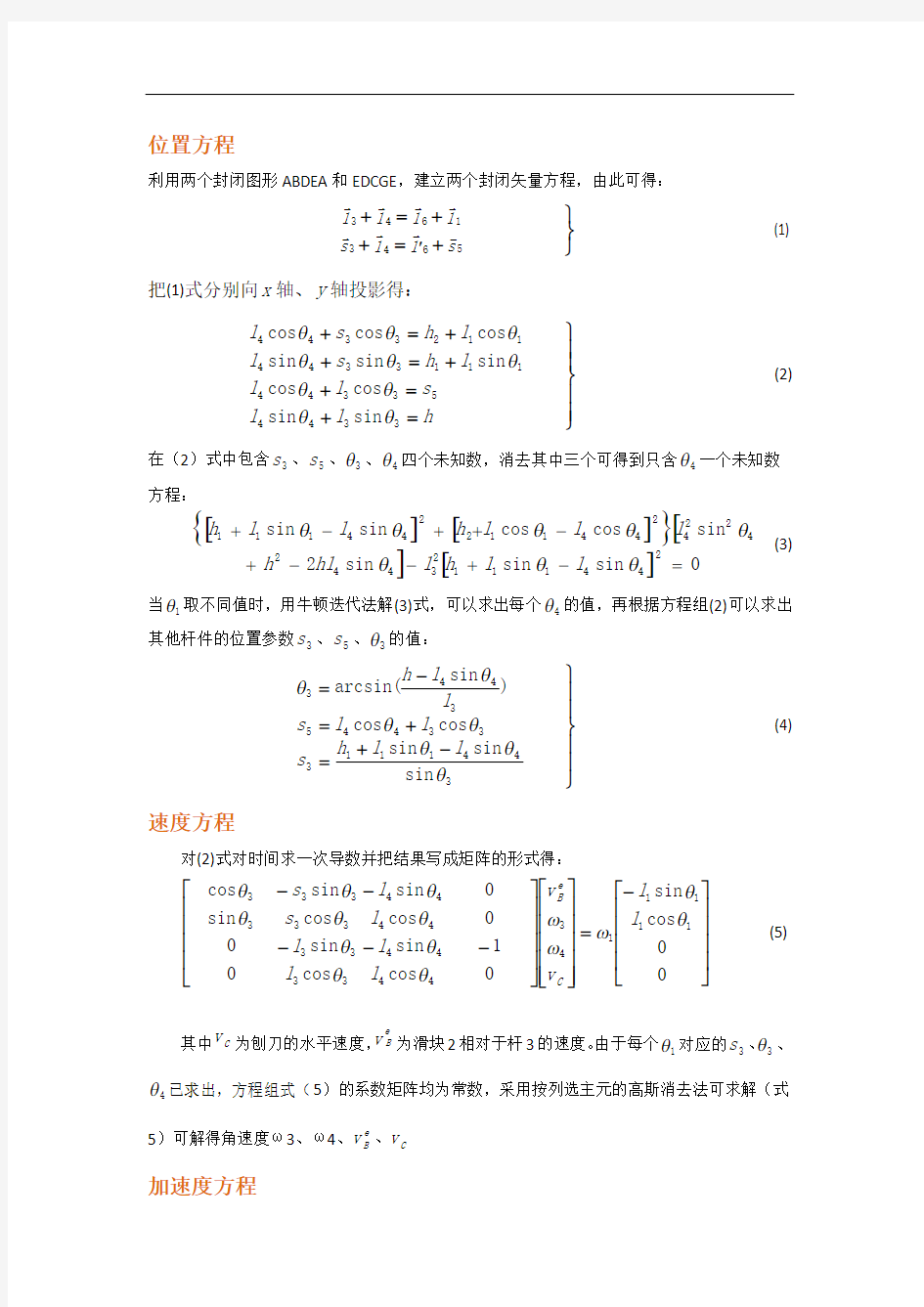
位置方程
利用两个封闭图形ABDEA 和EDCGE ,建立两个封闭矢量方程,由此可得:
?
??+=++=+' s l l s l l l l
56431
643 (1) 把(1)式分别向x 轴、y 轴投影得:
????
?
?
?=+=++=++=+ h l l s l l l h s l l h s l 334
45
334411133441
12334
4sin sin cos cos sin sin sin cos cos cos θθθθθθθθθθ
(2) 在(2)式中包含3s 、5s 、3θ、4θ四个未知数,消去其中三个可得到只含4θ一个未知数 方程:
[][]{}[
]
[]
sin sin sin 2sin cos cos sin sin 2
441112
3
442
4
2242
441122
44111
=-+--+-++-+θθθθθθθθl l h l hl h l l l h l l h
(3)
当1θ取不同值时,用牛顿迭代法解(3)式,可以求出每个4θ的值,再根据方程组(2)可以求出其他杆件的位置参数3s 、5s 、3θ的值:
?
??
?
???-+=+=-= 3
4
41113334453
4
43sin sin sin cos cos )sin arcsin(θθθθθθθl l h s l l s l l h (4)
速度方程
对(2)式对时间求一次导数并把结果写成矩阵的形式得:
????????????-=??????
???????????????
???
?
?-----00cos sin 0
cos cos 01sin sin 00cos cos sin 0sin sin cos 11
111
434
43344334
43334
4333θθωωωθθθθθθθθθθl l v v l l l l l s l s C e B (5)
其中C v 为刨刀的水平速度,v e
B 为滑块2相对于杆3的速度。由于每个1θ对应的3s 、
3θ、4θ已求出,方程组式(5)的系数矩阵均为常数,采用按列选主元的高斯消去法可求解(式
5)可解得角速度ω3、ω4、e
B v 、
C v
加速度方程
把(5)对时间求导得矩阵式:
?
??
?????????--+???????????????????????????
?----------=??????
???????????????
???
?
?-----00sin cos 0sin sin 00cos cos 00sin sin cos cos 0cos cos sin sin 0
cos cos 01sin sin 00cos cos sin 0
sin sin cos 1111111
43444333444333444333333444333333434
4334
43344333
4
4333θωθωωωωθωθωθωθωθωθωθθωθωθωθθωααl l v v l l l l l s v l s v a a θl θl θl θl θl θs θθl θs θC e
B
e B e
B
C e B
(6)
同样采用按列选主元的高斯消去法可求解(6)可得角加速度3α、4α、e
B a 、
C a %主程序开始
clear;clc;
l1=180; %L1=lab l3=960; %l3=lCD l4=160; %l4=lED h=900; h1=460; h2=110; du=180/pi; omega1=1; alpha1=0;
theta1=linspace(0,35*pi/18,36);
%定义常量和已知参数,l1代表杆1的长度,l3代表杆3的长度,l4代表杆4的长度,h 表示
EG 的长度,h1表示AE 的竖直距离,h2表示AE 的水平距离,theta1表示角θ1的不同值。 theta3=zeros(1,36);theta4=zeros(1,36);s3=zeros(1,36);s5=zeros(1,36);test=zeros(1,36);vBe=zeros(1,36);vc=zeros(1,36);omega1=ones(1,36);omega3=zeros(1,36);omega4=zeros(1,36);aBe=zeros(1,36);ac=zeros(1,36);alpha1=zeros(1,36);alpha3=zeros(1,36);alpha4=zeros(1,36);A=zeros(4,4); dA=zeros(4,1);
%定义最终的结果数据,当θ1取不同值时,theta3表示θ3的值,theta4表示θ4的值,s3表示BD 的长度,s5表示GC 的长度,vBe 表示B 点在杆3上运动的速度,vc 表示杆5的运动速度,即牛头刨刀的速度,omega3表示杆3的转动角速度,omega4表示杆4的转动角速度,aBe 表示B 点在杆3上运动的角加速度,ac 表示杆5的加速度,即牛头刨刀的加速度,alpha3表示杆3的角加速度,alpha4表示杆4的角加速度,矩阵A,dA 表示线性方程组的系数矩阵
i=0; %i 为循环变量,在循环结构中使用 syms THETA1 THETA4 %定义符号变量,为以下计算做准备 fun1=((h1+l1*sin(THETA1)-l4*sin(THETA4))^2+(h2+l1*cos(THETA1)-l4*cos(THETA4))^2)*(l4^2*sin(THETA4)^2+h^2-2*h*l4*sin(THETA4))-l3^2*(h1+l1*sin(THETA1)-l4*sin(THETA4))^2; %定义迭代法中要求解的关于THETA4的方程。
x0=0; %定义在牛顿迭代法中的变量THEA4的初值。
for i=1:36 %用循环结构求当theta1取不同值时,theta3值。
fun2=subs(fun1,THETA1,theta1(i));%把不同的THETA1的值代入要求解的方程
[theta4(i),EA,it]=NEWTON(fun2,'THETA4',x0,0.0001,1000);
%用牛顿迭代法求得THEATA4,并赋值到theta4的数组中
x0=theta4(i); %把这次计算的解作为下一次计算的初值。end
for i=1:36
%用循环结构求当theta1的值取不同值时,theta3、s3、s5的取值。因为theta3的值可能的取值范围为[0,π],对theta3求解时应分以下两种情况讨论
if sign(h2+l1*cos(theta1(i))-l4*cos(theta4(i)))>0 %theta3<π/2
theta3(i)=asin((h-l4*sin(theta4(i)))/l3);
else theta3(i)=pi-asin((h-l4*sin(theta4(i)))/l3); %theta3>π/2
end
test(i)=h1+l1*sin(theta1(i))-l4*sin(theta4(i));
s5(i)=l4*cos(theta4(i))+l3*cos(theta3(i));
s3(i)=(h1+l1*sin(theta1(i))-l4*sin(theta4(i)))/sin(theta3(i));
end
for i=1:36
%用循环结构求当theta1的值取不同值时vBe、omega3、omega4、vc的值。
A(1,1)=cos(theta3(i));A(1,2)=-s3(i)*sin(theta3(i));A(1,3)=-l4*sin(theta4(i));
A(2,1)=sin(theta3(i));A(2,2)=s3(i)*cos(theta3(i));A(2,3)=l4*cos(theta4(i));
A(3,2)=-l3*sin(theta3(i));A(3,3)=-l4*sin(theta4(i));A(3,4)=-1;
A(4,2)=l3*cos(theta3(i));A(4,3)=l4*cos(theta4(i));
dA(1,1)=-omega1(1,1)*l1*sin(theta1(i));
dA(2,1)=omega1(1,2)*l1*cos(theta1(i));
x=gauss(A,dA); %用按列选主元的高斯消去法求解
vBe(i)=x(1);omega3(i)=x(2);omega4(i)=x(3);vc(i)=x(4);
%把求得的结构赋值给各物理量
end
for i=1:36 %用循环结构求当theta1的值取不同值时aBe、alpha3、alpha4、vc的值。
A(1,1)=cos(theta3(i));A(1,2)=-s3(i)*sin(theta3(i));
A(1,3)=-l4*sin(theta4(i));A(2,1)=sin(theta3(i));
A(2,2)=s3(i)*cos(theta3(i));A(2,3)=l4*cos(theta4(i));
A(3,2)=-l3*sin(theta3(i));A(3,3)=-l4*sin(theta4(i));A(3,4)=-1;
A(4,2)=l3*cos(theta3(i));A(4,3)=l4*cos(theta4(i));
dA(1,1)=-omega3(i)*sin(theta3(i))*vBe(i)*2-s3(i)*omega3(i)^2*cos(theta3(i))-l4*omega4(i)^ 2*cos(theta4(i))-l1*cos(theta1(i));
dA(2,1)=omega3(i)*cos(theta3(i))*vBe(i)*2-s3(i)*omega3(i)^2*sin(theta3(i))-l4*omega4(i)^2*sin( theta4(i))-l1*sin(theta1(i));
dA(3,1)=-l3*omega3(i)^2*cos(theta3(i))-l4*omega4(i)^2*cos(theta4(i));
dA(4,1)=-l3*omega3(i)^2*sin(theta3(i))-l4*omega4(i)^2*sin(theta4(i));
%构造速度方程的系数矩阵
x=gauss(A,dA); %用按列选主元的高斯消去法求解
aBe(i)=x(1);alpha3(i)=x(2);alpha4(i)=x(3);ac(i)=x(4);
%把求得的结构赋值给各物理量
end
%主程序结束
%出图程序
figure(1);
i=1:10:360;
%l3角位移图
subplot(2,2,1);
plot(i,theta3*du,'r');
title('角位移图');
xlabel('曲柄转角\theta_1/\circ');
ylabel('角位移/\circ');
grid on;hold on;
text(200,110,'\theta3');
%l4角位移图
subplot(2,2,2);
plot(i,theta4*du,'r');
title('角位移图');
xlabel('曲柄转角\theta_1/\circ');
ylabel('角位移/\circ');
grid on;hold on;
text(150,10,'\theta4');
%滑块2位移
subplot(2,2,3);
plot(i,s3,'r');
title('位置');
xlabel('滑块位置\s3/\circ');
ylabel('毫米/\circ');
grid on;hold on;
text(150,500,'s3');
%c点位移
subplot(2,2,4);
plot(i,s5,'r');
title('位置');
xlabel('滑块位置\s3/\circ');
ylabel('毫米/\circ');
grid on;hold on;
text(150,0,'s5');
figure(2);