
7-5 非线性控制系统的相平面分析法
相平面法在分析非线性系统时是很有用处的。但是,我们在介绍非线性系统的分析方法之前,先讨论一下相平面法在分析线性二阶系统中的应用是很有好处的。因为许多非线性元件特性一般都可分段用线性方程来表示,所以非线性控制系统也可以用分段线性系统来近似。
一、线性控制系统的相平面分析
1、阶跃响应 设线性二阶控制系统如图7-38所示。若系统开始处于平衡状态。试求
系统在阶跃函数)(1)(0t R t r ?= 作用下,在e
e -平面上的相轨迹。 建立系统微分方程式,由图示系统可得
Ke c c
T =+ 因为c r e -=,代入上式得
r r T Ke e e
T +=++ (7-31) 对于->?=0),(1)(0t t R t r 时,0)()(==t r t r
因此上式可写成
0=++Ke e e T (7-32)
方程(7-32)与(7-22)式相仿。因为假设系统开始处于平衡状态,所以误差信号的初始条
件是0)0(R e =和0)0(=e
。e e -平面上的相轨迹起始于)0,(0R 点,而收敛于原点(系统的奇点)。当系统特征方程的根是共轭复数根,并且位于左半平面时,其相轨迹如图7-39(a)
所示。根据e
e -平面上的相轨迹就可方便的求得c c -平面上系统输出的相轨迹,如图7-39(b)所示。由图7-39可见,欠阻尼情况下系统的最大超调量P σ及系统在稳态时的误差
为零。因为e e -平面相轨迹最终到原点,即奇点;所以在c
c -平面上相轨迹最终到达0R c =的稳态值,则奇点坐标为)0,(0R 。
2、斜坡响应 对于斜坡输入t V t r 0)(=;当0>t 时,)(t r 的导数0)(V t r
= 及0)(=t r 。因此,方程(7-31)可以写成
0V Ke e e
T =++ 或 0)(0=-++K
V e K e e T
令v e K V e =-0,代入上式,则有
0V Ke e e T =++ννν
(7-33) 在v v e
e -平面上,方程(7-33)给出了相平面图与在e e -平面上方程(7-32)给出的相平面图是相同的。
应当指出,特征方程式的根确定了奇点的性质,在v v e
e -平面上的奇点的位置是坐标原点,而在e e -平面上奇点坐标为)0,(0K V 点。又因为我们假设系统初始状态为平衡状态。
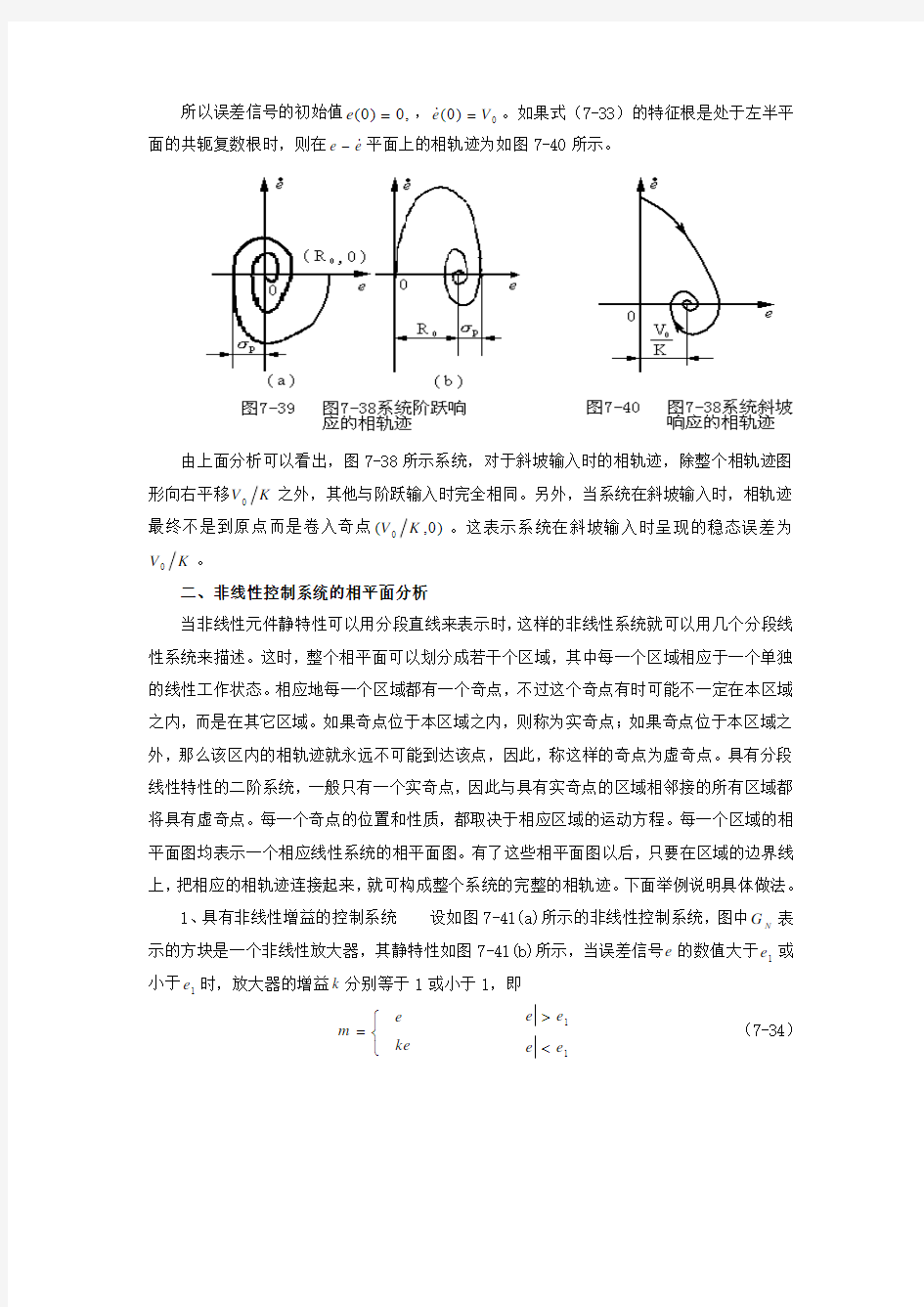
所以误差信号的初始值,0)0(=e ,0)0(V e
= 。如果式(7-33)的特征根是处于左半平面的共轭复数根时,则在e
e -平面上的相轨迹为如图7-40所示。 由上面分析可以看出,图7-38所示系统,对于斜坡输入时的相轨迹,除整个相轨迹图形向右平移K V 0之外,其他与阶跃输入时完全相同。另外,当系统在斜坡输入时,相轨迹最终不是到原点而是卷入奇点)0,(0K V 。这表示系统在斜坡输入时呈现的稳态误差为
K V 0。
二、非线性控制系统的相平面分析
当非线性元件静特性可以用分段直线来表示时,这样的非线性系统就可以用几个分段线性系统来描述。这时,整个相平面可以划分成若干个区域,其中每一个区域相应于一个单独的线性工作状态。相应地每一个区域都有一个奇点,不过这个奇点有时可能不一定在本区域之内,而是在其它区域。如果奇点位于本区域之内,则称为实奇点;如果奇点位于本区域之外,那么该区内的相轨迹就永远不可能到达该点,因此,称这样的奇点为虚奇点。具有分段线性特性的二阶系统,一般只有一个实奇点,因此与具有实奇点的区域相邻接的所有区域都将具有虚奇点。每一个奇点的位置和性质,都取决于相应区域的运动方程。每一个区域的相平面图均表示一个相应线性系统的相平面图。有了这些相平面图以后,只要在区域的边界线上,把相应的相轨迹连接起来,就可构成整个系统的完整的相轨迹。下面举例说明具体做法。
1、具有非线性增益的控制系统 设如图7-41(a)所示的非线性控制系统,图中N G 表示的方块是一个非线性放大器,其静特性如图7-41(b)所示,当误差信号e 的数值大于1e 或小于1e 时,放大器的增益k 分别等于1或小于1,即
?
?
?
=m ke
e
1
1e e e e <> (7-34)
可见,系统在大误差信号时,具有大的增益;而在小误差信号时,增益也小。
因为图7-40(a)所示系统是分段线性的。所以可以把它看成是两个线性系统的组合,其相应的相轨迹也由两个线性系统的相轨迹组合而成。具体做法如下:
假设系统初始状态为静止平衡状态。根据系统结构图,写出变量c 与m 之间的微分方程为
Km c c
T =+ 由于c r e -=,代入上式得
r r T K e e T +=++ (7-35) 设系统在单位阶跃输入)(1)(t t r =作用下,在e
e -平面上作相应的相轨迹。 对于单位阶跃输入,当0>t 时,0==r r
,所以式(7-35)成为 0=++Km e e T (7-36)
上式即为非线性系统在单位阶跃作用下的误差微分方程。将式(7-34)代入式(7-36)得下列两个线性微分方程:
0=++Ke e e T 1e e > (7-36a ) 0=++Kkm e e
T 1e e < (7-36b)
在下面的分析中,假设方程(7-36a )为欠阻尼的运动方程,其特征根为具有负实部的共轭复数根,对应的相轨迹如图7-42(a)所示,奇点(0,0)为稳定焦点。假设方程(7-36b )为过阻尼的运动方程,相应的特征根为两个负实根,相轨迹如图7-42(b)所示,奇点(0,0)为稳定节点。
根据方程(7-36a )和(7-36b )所确定的相应区域,将图7-42(a)和图7-42(b)组合在一起就可得到图7-41所示非线性系统的相轨迹图,如图7-43所示。图中系统参数为:1=T ,
0625.0=k ,4=K 和2.01=e 。
由图7-43可知,相平面被分割成三个区域:在直线1e e =和1e e -=限定的区域内对应着方程(7-36b ),而在这个区域以外相轨迹由方
程(7-36a)确定。相轨迹起始于A 点,该点由初
始条件,0)0(=e ,0)0(=e
确定。从A 点出发的相轨迹,首先沿7-42(a)所示相轨迹运动,并“企图”收敛到稳定焦点(虚奇点,坐标原点)。然而,当相点(描述点)运动到B 点,即到达本区域的边界线1e e =线上时,若继续运动将越
出边界而进入新的区域。因此,相轨迹将在B 点发生转换,B 点是上一区域的终点,同时也
是下一区域的起点。从B 点开始直至再发生下一次转换为止,相点将沿图7-42(b)所示相迹
运动而企图收敛到稳定节点
),(00。但是在C 点,系统又一次发生转换,相轨迹趋向于收敛虚奇点(稳定焦点)。同样,当相点到达D 点时又将发生转换……如此反复继续下去,直至最后相轨迹进入1e ±区域,不再越出并最终收敛到稳定节点,即实奇点(0,0)为止。可见,非线性系统的整个相轨迹为ABCDEFO
,如图7-43的实线所示。显然,系统在阶跃输入
下稳态误差为零。图7-43中用虚线描绘的相轨迹为图7-44所示欠阻尼二阶系统在单位阶跃作用下的相轨迹图。比较这两条相轨迹,可见前者所对应的阶跃响应特性比后者要好。首先
收敛速度快,即系统速度性提高了,其次,超调量小。对于较小的阶跃输入,响应甚至是无超调的。对于中等大小的阶跃输入,系统的阶跃响应具有一次超调。对于大的阶跃输入,虽然在系统的响应曲线中可能出现超调和反向超调,但其超调量肯定比图7-44所示的线性系统要小。图7-41所示系统在典型阶跃输入时的误差响应曲线如图7-45。
2、继电系统
在图7-41所示非线性随动系统中,
将放大器换成继电器,并假定继电器具有理想的继电特性,系统结构图如图7-46所示。理想继电器特性的数学表达式为
??
?-=1
1m
0<>e e (7-37)
假设系统初始状态为静止平衡状态。继电系
统运动方程为
r r T Km e e
T +=++ 对于阶跃输入)(1)(0t R t r ?=,当0>t 时,有
0==r r ,所以上式为
0=++Km e e
T (7-38) 将式(7-37)代入上式得方程组
??
?=-+=++00K e e T K e e T
0<>e e
)
387()387(b a --
显然,两个方程均为线性微分方程。因为继电特性是由两条直线段组成,所以两条直线段内
继电系统的特性仍为线性的,只是在继电器切换时才表现出非线性特性。
将de
e d e e
=代入(7-38)式,则有
0=++Km e
de
e d e
T 或 e
d e
Km e T de +-= 对上式两边进行积分得相轨迹方程
Km e
Km e TKm e T e
T e e +++-+=000ln
由假设条件:00R e =,00=e
代入上式可得 ??
?
??++-=1ln 0Km e
TKm e
T R e (7-39)
代入m 值则有
???
??
????? ??+---=??
?
??++-=1ln 1ln 0
0K e TK e R e K e TK e R e ττ 00<>e e )397()397(b a --
根据上两式可作出继电系统的相轨迹如图7-47所示。由图可见,相轨迹起始于)0,(0R 点,在0>e 的区域内按方程(7-39a )变化,到达e 轴A 点时,继电器切换,相轨迹方程按方程(7-39b)变化。这样依次进行,最后趋于坐标原点(0,0),得系统完整的相轨迹如图7-47。另外由图可见,相轨迹转换均在纵轴上,这种直线称为开关线,它表示继电器工作状态的转换。
3、速度反馈对继电系统阶跃响应的影响 设系统结构图如图7-48所示,图中T <τ。这时理想继电特性的数学表达式为
??
?-=1
1m
00<+>+e
e e e ττ (7-40)
系统运动方程为
r r T Km e e
T +=++ 对于阶跃输入)(1)(0t R t r ?=,当0>t 时,0==r r
,上式为 0=++Km e e
T (7-41) 将式(7-40)代入式(7-41)得方程组 ??
?=-+=++00K e e
T K e e
T
00<+>+e
e e e ττ
)
417()417(b a --
上式方程组与方程)387()387(b a --、比较,可见它们完全相同,不同之处仅是方程所对应的区域不同。
根据方程)397()397(b a --、可知,具有速度反馈的继电系统的相迹方程为
???
??
????? ??+---=???
??+--=1ln 1ln 0
0K e TK e T R e K e TK e T R e 00<+>+e e e e ττ )427()427(b a --
由上两式边界条件可得开关线方程为
0=+e
e τ (7-43) 根据开关线方程及相轨迹方程可作出系统的相轨迹,如图7-49所示。将此相轨迹图与图7-47比较,可看出两者主要是开关线不同。未接入速度反馈时,开关线为0=e 的虚轴;在接入速度反馈后,开关线逆时针转了一个角度τ?arctan =。由于开关线逆时针方向转动的结果,相轨迹将提前进行切换,这样就使得系统阶跃响应的超调量减小,调节时间缩短,系统的动态性能得到改善。由于开关线转角随着速度反馈强度的增大而增大,因此,当T <τ时,系统性能将随着速度反馈强度的增大而得到改善。
综上所述,相平面法一般可解决下列问题:
(1)相平面上可以清晰地表示出系统在各种初始条件下的所有可能的运动; (2)相平面上可用奇点来分析系统的稳定性; (3)相平面上可用极限环来分析系统的自振稳定性; (4)由相轨迹可以求出系统的瞬态响应。
最后应当强调指出,相平面法只能用来分析二阶系统在初始条件下或在一些特殊的外作用下的运动。如果是三阶系统,相应地要用三个变量(状态)x x x 和、才能完全描述系统的运动,此时相轨迹就必须描绘在x
x x 和、所组成的三维空间中了。因此,确定相空间的相轨迹比相平面的相轨迹要复杂和困难得多。对高阶系统来说,就必须用抽象的多维空间来描述了,现代控制理论的状态空间法实际上就是相平面法的扩展。
SPSS—非线性回归(模型表达式)案例解析 2011-11-16 10:56 由简单到复杂,人生有下坡就必有上坡,有低潮就必有高潮的迭起,随着SPSS 的深入学习,已经逐渐开始走向复杂,今天跟大家交流一下,SPSS非线性回归,希望大家能够指点一二! 非线性回归过程是用来建立因变量与一组自变量之间的非线性关系,它不像线性模型那样有众多的假设条件,可以在自变量和因变量之间建立任何形式的模型非线性,能够通过变量转换成为线性模型——称之为本质线性模型,转换后的模型,用线性回归的方式处理转换后的模型,有的非线性模型并不能够通过变量转换为线性模型,我们称之为:本质非线性模型 还是以“销售量”和“广告费用”这个样本为例,进行研究,前面已经研究得出:“二次曲线模型”比“线性模型”能够更好的拟合“销售量随着广告费用的增加而呈现的趋势变化”,那么“二次曲线”会不会是最佳模型呢? 答案是否定的,因为“非线性模型”能够更好的拟合“销售量随着广告费用的增加而呈现的变化趋势” 下面我们开始研究: 第一步:非线性模型那么多,我们应该选择“哪一个模型呢?” 1:绘制图形,根据图形的变化趋势结合自己的经验判断,选择合适的模型 点击“图形”—图表构建程序—进入如下所示界面:
点击确定按钮,得到如下结果:
放眼望去, 图形的变化趋势,其实是一条曲线,这条曲线更倾向于"S" 型曲线,我们来验证一下,看“二次曲线”和“S曲线”相比,两者哪一个的拟合度更高! 点击“分析—回归—曲线估计——进入如下界面
在“模型”选项中,勾选”二次项“和”S" 两个模型,点击确定,得到如下结果: 通过“二次”和“S “ 两个模型的对比,可以看出S 模型的拟合度明显高于
多项式回归、非线性回归模型 关键词:回归方程的统计检验、拟合优度检验、回归方程的显著性检验、F 检验、回归系数的显著性检验、残差分析、一元多项式回归模型、一元非线性回归模型 一、回归方程的统计检验 1. 拟合优度检验 1. 概念介绍 SST 总离差平方和total SSR 回归平方和regression SSE 剩余平方和error ∑∑∑∑====--= --- =n i i i n i i i n i i i n i i i y y y y y y y y R 1 2 1 2 12 12 2)()?()()?(1 2. 例题1 存在四点(-2,-3)、(-1,-1)、(1,2)、(4,3)求拟合直线与决定系数。 2. 回归方程的显著性检验 ) 2/()2/()?()?(1 212 -= ---= ∑∑==n SSE SSA n y y y y F n i i i n i i i 例6(F 检验) 在合金钢强度的例1中,我们已求出了回归方程,这里考虑关于回归方程的显著性检验,经计算有: 表5 X 射线照射次数与残留细菌数的方差分析表 这里值很小,因此,在显著性水平0.01下回归方程是显著的。 3. 回归系数的显著性检验 4. 残差分析 二、一元多项式回归模型
模型如以下形式的称为一元多项式回归模型: 0111a x a x a x a y n n n n ++++=-- 例1(多项式回归模型) 为了分析X 射线的杀菌作用,用200千伏的X 射线来照射细菌,每次照射6分钟,用平板计数法估计尚存活的细菌数。照射次数记为t ,照射后的细菌数为y 见表1。试求: (1)给出y 与t 的二次回归模型。 (2)在同一坐标系内作出原始数据与拟合结果的散点图。 (3)预测16=t 时残留的细菌数。 (4)根据问题的实际意义,你认为选择多项式函数是否合适? 表1 X 射线照射次数与残留细菌数 程序1 t=1:15; y=[352 211 197 160 142 106 104 60 56 38 36 32 21 19 15]; p=polyfit(t,y,2)%作二次多项式回归 y1=polyval(p,t);%模型估计与作图 plot(t,y,'-*',t,y1,'-o');%在同一坐标系中做出两个图形 legend('原始数据','二次函数') xlabel('t(照射次数)')%横坐标名 ylabel('y(残留细菌数)')%纵坐标名 t0=16; yc1=polyconf(p,t0)%预测t0=16时残留的细菌数,方法1 yc2=polyval(p,t0)%预测t0=16时残留的细菌数,方法2 即二次回归模型为: 8967.3471394.519897.121+-=t t y
相平面法例题解析: 要求: 1.正确求出对于非线性系统在每个线性区的相轨迹方程,也就是e e - 之间关系的方程(或c c - )。会画相轨迹(模型中是给具体数的)。※※关键是确定开关线方 程。 2. ※※※如果发生自持振荡,计算振幅和周期。 注意相平面法一般应: 1)按照信号流向与传输关系。线性部分产生导数关系,非线性部分形成不同分区。连在一 起就形成了不同线性分区对应的运动方程,即含有c 或者e 的运动方程。 2)※※※根据不同线性分区对应的运动方程的条件方程确定开关线方程。开关线方程确定很关键。 3)※※※根据不同线性分区对应的运动方程,利用解析法(分离变量积分法或者消去t 法) 不同线性分区对应的相轨迹方程,即c c - 和e e - 之间关系。 4)※根据不同分区的初始值绘制出相轨迹,并求出稳态误差和超调、以及自持振荡的周期和振幅等。 例2 问题1. 用相平面法分析系统在输入r (t ) = 4.1(t )时的运动情况。 问题2. 如果发生自持振荡 ,求自持振荡的周期和振幅。 解:问题1:1)设系统结构图,死区特性的表达式: 0,||2 2,22,2x e x e e x e e =≤?? =->??=+<-? 2)线性部分: 2 ()1 ()C s X s s =,则微分方程为:c x = 3)绘制e e - 平面相轨迹图。因为e r c =-,c r e =-,c r e =- ,c r e =- 。代入则 e x r =-+ (1) 当0t >,0r = ,0r = 。代入,则各区的运动方程0,||2I 2,2II 2,2III e e e e e e e e =≤--?? =->---??=--<----? 由于非线性特性有3个分区,相平面e e -分为3个线性区。 注意,当相平面选好后,输入代入后,最后代入非线性特性。 4) 系统开关线:2e =±。 5) 由题意知初始条件(0)(0)(0)4e r c =-=,(0)(0)(0)0e r c =-= 在II 区,则从
实验二 离散控制系统分析方法 一、实验目的 利用MATLAB 对各种离散控制系统进行时域分析。 二、实验指导 1.控制系统的稳定性分析 由前面章节学习的内容可知,对线性系统而言,如果一个连续系统的所有极点都位于s 平面的左半平面,则该系统是一个稳定系统。对离散系统而言,如果一个系统的全部极点都位于z 平面的单位圆内部,则该系统是一个稳定系统。一个连续的稳定系统,如果所有的零点都位于s 平面的左半平面,即所有零点的实部小于零,则该系统是一个最小相位系统。一个离散的稳定系统,如果所有零点都位于z 平面的单位圆内,则称该系统是一个最小相位系统。由于Matlab 提供了函数可以直接求出控制系统的零极点,所以使用Matlab 判断一个系统是否为最小相位系统的工作就变得十分简单。 2.控制系统的时域分析 时域分析是直接在时间域对系统进行分析。它是在一定输入作用下,求得输出量的时域表达式,从而分析系统的稳定性、动态性能和稳态误差。这是一种既直观又准确的方法。 Matlab 提供了大量对控制系统的时域特征进行分析的函数,适用于用传递函数表示的模型。其中常用的函数列入表1,供学生参考。 例1.z z z H 5.05 .1)(2+= 试绘出其单位阶跃响应及单位斜波输入响应。 解:为求其单位阶跃响应及单位斜波输入响应,编制程序如下: num=[1.5]; den=[1 0.5 0];sysd=tf(num,den,0.1) [y,t,x]=step(sysd);
subplot(1,2,1) plot(t,y); xlabel('Time-Sec'); ylabel('y(t)'); gtext('单位阶跃响应') grid; u=0:0.1:1; subplot(1,2,2) [y1,x]=dlsim(num,den,u); plot(u,y1) xlabel('Time-Sec'); ylabel('y(t)'); gtext('单位速度响应') grid 二、实验内容 1、MATLAB在离散系统的分析应用 对于下图所示的计算机控制系统结构图1,已知系统采样周期为T=0.1s,被 控对象的传递函数为 2 () s(0.11)(0.05s1) G s s = ++ ,数字控制器 0.36 () 0.98 z D z z - = + ,试 求该系统的闭环脉冲传递函数和单位阶跃响应。 图1 计算机控制系统结构图 实验步骤: 1).求解开环脉冲传递函数,运用下面的matlab语句实现:>> T=0.1; >> sys=tf([2],[0.005 0.15 1 0]); %将传函分母展开>> sys1=c2d(sys,T,'zoh'); >> sys2=tf([1 -0.36],[1 0.98],0.1); >> sys3=series(sys2,sys1) 执行语句后,屏幕上显示系统的开环脉冲传递函数为: sys3 = 0.03362 z^3 + 0.05605 z^2 - 0.01699 z - 0.002717 --------------------------------------------------
第八章 习题 8-1已知具有理想继电器的非线性系统如图8-1所示,试用相平面法分析: 图8-1 (1)T d =0时系统的运动; (2)T d =0.5时系统的运动,并说明比例微分控制对改善系统性能的作用; (3)T d =2,并考虑实际继电器有延迟时系统的运动。 8-2 设三个非线性系统的非线性环节一样,其线性部分分别为 (1)1 ();(0.11) G s s s = + (2)2 ();(1)G s s s = + (3)2(1.51) ()(1)(0.11) s G s s s s += ++ 用描述函数法分析时,哪个系统分析的准确度高。 8-3某单位反馈系统,其前向通路中有一描述函数4 ()j e N A A π-=的非线性元件, 线性部分的传递函数为15 ()(0.51) G s s s =+,试用描述函数法确定系统是否存在 自振?若有,参数是多少? 8-4已知非线性系统的结构图如图8-2所示,图中非线性环节的描述函数 6 ()(0),2 A N A A A +=>+试用描述函数法确定: 图8-2 (1)使该非线性系统稳定,不稳定以及产生周期运动时,线性部分的k 值范围; (2)判断周期运动的稳定性,并计算稳定周期运动的振幅和频率。 8-5非线性系统如图8-3所示,试用描述函数法分析周期运动的稳定性,并确定系统输出信号振荡的振幅和频率。
图8-3 8-6试用描述函数法说明图8-4所示系统必然存在自振,并确定c 的自振振幅和频率,画出c,x,y 的稳态波形。 图8-4 8-7某线性系统的结构图如图8-5所示,试分别绘制下列三种情况时,变量e 的相轨迹,并根据相轨迹分别作出相应的e(t)曲线。 图8-5 (1)J=1,K 1=1,K 2=2,初始条件e(0)=3, (0)0;(0)1,(0) 2.5e e e ===- ; (2)J=1,K 1=1,K 2=0.5,初始条件e(0)=3, (0)0;(0)3,(0)0e e e ==-= ; (3)J=1,K 1=1,K 2=0,初始条件e(0)=1, (0)1;(0)0,(0)2e e e === ; 8-8设一阶非线性系统的微分方程为3x x x =-+ 试确定系统有几个平衡状态,分析各平衡状态的稳定性,并作出系统的相轨迹。 8-9试确定下列方程的奇点及类型,并用等倾线法绘制它们的相平面图: (1)||0x x x ++= ; (2)0x x sign x ++= ; (3)0x sin x += ;
CH4、控制系统的分析方法 早期的控制系统分析过程复杂而耗时,如想得到一个系统的冲激响应曲线,首先需要编写一个求解微分方程的子程序,然后将已经获得的系统模型输入计算机,通过计算机的运算获得冲激响应的响应数据,然后再编写一个绘图程序,将数据绘制成可供工程分析的响应曲线。 MATLAB控制系统工具箱和SIMULINK辅助环境的出现,给控制系统分析带来了福音。 控制系统的分析包括系统的稳定性分析、时域分析、频域分析及根轨迹分析。
第一节控制系统的稳定性分析 一、系统稳定及最小相位系统判据 ?对于连续时间系统,如果闭环极点全部在S平面左半平面,则系统是稳定的。 ?对于离散时间系统,如果系统全部极点都位于Z平面的单位圆内,则系统是稳定的。 ?若连续时间系统的全部零极点都位于S左半平面;或若离散时间系统的全部零极点都位于Z平面单位圆内,则系统是最小相位系统。
二、系统稳定及最小相位系统的判别方法 1、间接判别(工程方法) 劳斯判据:劳斯表中第一列各值严格为正,则系统稳定,如果劳斯表第一列中出现小于零的数值,系统不稳定。胡尔维茨判据:当且仅当由系统分母多项式构成的胡尔维茨矩阵为正定矩阵时,系统稳定。 2、直接判别 MATLAB提供了直接求取系统所有零极点的函数,因此 可以直接根据零极点的分布情况对系统的稳定性及是否 为最小相位系统进行判断。
例exp4_1.m 已知某系统的模型如右所示: []u x y u x x 7165210016127 5874036221 21+-=????????????-+????????????---= 要求判断系统的稳定性及系统是否为最小相位系统。 例exp4_2.m 系统模型如下所示,判断系统的稳定性,以及系统 是否为最小相位系统。 11221171494528110142841163)(234562 3+++++++++=s s s s s s s s s s G
1.3非线性回归问题, 知识目标:通过典型案例的探究,进一步学习非线性回归模型的回归分析。 能力目标:会将非线性回归模型通过降次和换元的方法转化成线性化回归模型。 情感目标:体会数学知识变化无穷的魅力。 教学要求:通过典型案例的探究,进一步了解回归分析的基本思想、方法及初步应用. 教学重点:通过探究使学生体会有些非线性模型通过变换可以转化为线性回归模型,了解在解决实际问题的 过程中寻找更好的模型的方法. 教学难点:了解常用函数的图象特点,选择不同的模型建模,并通过比较相关指数对不同的模型进行比较. 教学方式:合作探究 教学过程: 一、复习准备: 对于非线性回归问题,并且没有给出经验公式,这时我们可以画出已知数据的散点图,把它与必修模块《数学1》中学过的各种函数(幂函数、指数函数、对数函数等)的图象作比较,挑选一种跟这些散点拟合得最好的函数,然后采用适当的变量代换,把问题转化为线性回归问题,使其得到解决. 二、讲授新课: 1. 探究非线性回归方程的确定: 1. 给出例1:一只红铃虫的产卵数y 和温度x 有关,现收集了7组观测数据列于下表中,试建立y 与x 之间的/y 个 2. 讨论:观察右图中的散点图,发现样本点并没有分布在某个带状区域内,即两个变量不呈线性相关关系,所以不能直接用线性回归方程来建立两个变量之间的关系. ① 如果散点图中的点分布在一个直线状带形区域,可以选线性回归模型来建模;如果散点图中的点分布在一个曲线状带形区域,就需选择非线性回归模型来建模. ② 根据已有的函数知识,可以发现样本点分布在某一条指数函数曲线y =2C 1e x C 的周围(其中12,c c 是待定的参数),故可用指数函数模型来拟合这两个变量. ③ 在上式两边取对数,得21ln ln y c x c =+,再令ln z y =,则21ln z c x c =+,可以用线性回归方程来拟合. ④ 利用计算器算得 3.843,0.272a b =-=,z 与x 间的线性回归方程为 0.272 3.843z x =-,因此红铃虫的产卵数对温度的非线性回归方程为0.272 3.843x y e -=. ⑤ 利用回归方程探究非线性回归问题,可按“作散点图→建模→确定方程”这三个步骤进行. 其关键在于如何通过适当的变换,将非线性回归问题转化成线性回归问题. 三、合作探究 例 2.:炼钢厂出钢时所用的盛钢水的钢包,在使用过程中,由于钢液及炉渣对包衬耐火材料的侵蚀,使其容积不断增大,请根据表格中的数据找出使用次数 x 与增大的容积y 之间的关系.
非线性回归分析 回归分析中,当研究的因果关系只涉及因变量和一个自变量时,叫做一元回归分析;当研究的因果关系涉及因变量和两个或两个以上自变量时,叫做多元回归分析。此外,回归分析中,又依据描述自变量与因变量之间因果关系的函数表达式是线性的还是非线性的,分为线性回归分析和非线性回归分析。通常线性回归分析法是最基本的分析方法,遇到非线性回归问题可以借助数学手段化为线性回归问题处理 两个现象变量之间的相关关系并非线性关系,而呈现某种非线性的曲线关系,如:双曲线、二次曲线、三次曲线、幂函数曲线、指数函数曲线(Gompertz)、S型曲线(Logistic) 对数曲线、指数曲线等,以这些变量之间的曲线相关关系,拟合相应的回归曲线,建立非线性回归方程,进行回归分析称为非线性回归分析 常见非线性规划曲线 1.双曲线1b a y x =+ 2.二次曲线 3.三次曲线 4.幂函数曲线 5.指数函数曲线(Gompertz) 6.倒指数曲线y=a / e b x其中a>0, 7.S型曲线(Logistic) 1 e x y a b-= + 8.对数曲线y=a+b log x,x>0 9.指数曲线y=a e bx其中参数a>0 1.回归: (1)确定回归系数的命令 [beta,r,J]=nlinfit(x,y,’model’,beta0) (2)非线性回归命令:nlintool(x,y,’model’, beta0,alpha) 2.预测和预测误差估计: [Y,DELTA]=nlpredci(’model’, x,beta,r,J) 求nlinfit 或lintool所得的回归函数在x处的预测值Y及预测值的显著性水平为1-alpha的置信区间Y,DELTA. 例2 观测物体降落的距离s与时间t的关系,得到数据如下表,求s 2 解: 1. 对将要拟合的非线性模型y=a/ e b x,建立M文件volum.m如下:
第五章 简单非线性电阻电路的分析 5-1 含一个非线性元件的电阻电路的分析 一、含一个非线性元件的电阻电路都可用电源等效定理来等效 N 为含源线性网络。 二、非线性电路的一般分析方法 1、图解法 2、代数法 3、分段分析法 4、假定状态分析法 1、图解法 设非线性电阻的V AR 为 在如上图所示u 和i 的参考方向如下,线形部分的V AR 为 将 代入上式得 通常,用图解法求解u 和i 如图5-2 两曲线的交点Q 是所求解答。直线称为负载线 在求出端口电压 u Q 和 i Q 后。就 可用置换定理求出线性单口网络内部的电 ) (u f i =i R u u oc 0-=)(u f i =oc oc u u u f R u f R u u =+-=)()(00
压电流。 例5-1 电路如图5-3(a)所示,二极管特性曲线如图(d)所示,输入电压随时间变化。 (1)试求所示电路输出电压u0对输入电压u i的曲线,即u0-u i转移特性; (2)若输入电压的波形如图(e)所示,试求输出电压u0的波形。 解戴维南等效电路 由电路可知 2 i oc u u= i u u30 0 + =
若 u i 变化时(交流),戴维南等效电压源也是时变的。但Ro 是定值,所以 线性网络的负载线具有不变的斜率 -1/Ro ,在 u-i 平面上作平行移动,每一时 刻负载线在电压轴的截距总是等于等效电压源在该时刻的瞬时值,负载线与二极管特性曲线的交点也在移动,即二极管的电压、电流都随时间而变。 求u 0-u i 转移特性曲线 由图(a )可得 当 时,0u 由 确定。 当 时,0i =, 可得转移特性曲线如图5-4所示 2、代数法 若i=f(u)中的f(u)可用初等函数表示,那么可利用节点法或回路法求解。 例5-2 如图5-5所示电路中,已知非线性电阻的V AR 为 试求电流i 。 030u u i =+0>i u i u u o 30+=0 控制系统的工作过程及方式
控制系统的工作过程与方式 一、教学目标 1.通过案例分析,归纳控制系统的基本特征; 2.了解开环控制和闭环控制的特点; 3.分析典型案例,熟悉简单的开环控制系统的基本组成和简单的工作过程 4.学会用框图来归纳控制系统实例的基本特征,逐步形成理解和分析简单开环和闭环控制系统的一般方法 二、教学内容分析 本节是“控制与设计”第二节的内容,其内容包括“控制系统”、“开环控制系统与闭环控制系统的组成及其工作过程”是学生在学习控制在我们的生活和生产中的应用后,进一步学习有关控制系统的组成、工作方式以及两种重要的控制系统:开环控制和闭环控制,并熟悉它们工作原理和作用。 生活中不乏简单控制系统的应用,人们对此往往象看待日出日落一类自然景色般的习以为常。本部分内容的学习,正是要引导学生,从技术的角度、用控制的思维看周围的存在,分析其道理,理解其基本的组成和工作过程。 本课教学内容,从学生生活经验出发,从实例分析入手,归纳出对控制系统的一般认识,以及根据控制系统方式分类的开环控制系统和闭环控制系统两类,并侧重对开环控制系统的工作过程、方框图、重要参数进行分析。本课要解决的重点是:开环控制系统的工作过程分析,用方框图描述开环控制系统的工作过程。 三、学习者分析 学生在前面的学习中已经学习和分析了控制在生活生产中的应用,获得了有关控制及其应用的初步感性认识和体验,但是对控制的基本工作方式和工作机理还缺乏了解,他们对进一步了解控制系统的知识是有探究的欲望的。结合前面的应用案例分析,进一步分析案例中控制是如何工作的,以及有怎样的工作方式,是学生学习的最近发展区。 四、教学策略: 1. 教法: 本章的教学结合具体的教学内容和目标我们采用“案例情景—机理分析—总结归纳-认识提升”的模式展开。在教学中把知识点的教与学置于具体的案例情景当中,通过丰富而贴近生活的案例使学生从生活体验到理性分析的思维升华过程。同时关注学生能否用不同的语言表达、交流自己的体验和想法。通过富有吸引力的现实生活中的问题,使学生回想和体会控制系统的工作过程,激发学生的好奇心和主动学习的欲望。让学生本着“回想—分析—联想—猜想”的思维过程,对教学内容进行步步展开,使学生亲历自主探索和思维升华的过程。 2. 学法: 鼓励学生自主探究和合作交流,引导学生自主观察、总结,在与他人的交流中丰富自己的思维方式,获得不同的体验和不同的发展。注意引导学生体会控制系统的工作过程和方式,特别是引导学生会学用系统框图来抽象概括控制系统、帮助分析和理解控制系统的组成及其工作过程的方法 五、教学资源准备 多媒体设备、相关图片资料、技术试验工具、材料等
非线性回归问题, 知识目标:通过典型案例的探究,进一步学习非线性回归模型的回归分析。 能力目标:会将非线性回归模型通过降次和换元的方法转化成线性化回归模型。 情感目标:体会数学知识变化无穷的魅力。 教学要求:通过典型案例的探究,进一步了解回归分析的基本思想、方法及初步应用. 教学重点:通过探究使学生体会有些非线性模型通过变换可以转化为线性回归模型,了解在解决实际问题的 过程中寻找更好的模型的方法. 教学难点:了解常用函数的图象特点,选择不同的模型建模,并通过比较相关指数对不同的模型进行比较. 教学方式:合作探究 教学过程: 一、复习准备: 对于非线性回归问题,并且没有给出经验公式,这时我们可以画出已知数据的散点图,把它与必修模块《数学1》中学过的各种函数(幂函数、指数函数、对数函数等)的图象作比较,挑选一种跟这些散点拟合得最好的函数,然后采用适当的变量代换,把问题转化为线性回归问题,使其得到解决. 二、讲授新课: 1. 探究非线性回归方程的确定: 1. 给出例1:一只红铃虫的产卵数y 和温度x 有关,现收集了7组观测数据列于下表中,试建立y 与x 之间 2. 讨论:观察右图中的散点图,发现样本点并没有分布在某个带状区域内,即两个变量不呈线性相关关系,所以不能直接用线性回归方程来建立两个变量之间的关系. ① 如果散点图中的点分布在一个直线状带形区域,可以选线性回归模型来建模;如果散点图中的点分布在一个曲线状带形区域,就需选择非线性回归模型来建模. ② 根据已有的函数知识,可以发现样本点分布在某一条指数函数曲线y =2C 1e x C 的周围(其中12,c c 是待定的参数),故可用指数函数模型来拟合这两个变量. ③ 在上式两边取对数,得21ln ln y c x c =+ ,再令ln z y =,则21ln z c x c =+, 可以用线性回归方程来拟合. ④ 利用计算器算得 3.843,0.272a b =-=,z 与x 间的线性回归方程为0.272 3.843z x =-$,因此红铃虫的产卵数对温度的非线性回归方程为$0.272 3.843x y e -=. ⑤ 利用回归方程探究非线性回归问题,可按“作散点图→建模→确定方程”这三个步骤进行. 其关键在于如何通过适当的变换,将非线性回归问题转化成线性回归问题. 三、合作探究 例 2.:炼钢厂出钢时所用的盛钢水的钢包,在使用过程中,由于钢液及炉渣对包衬耐火材料的侵蚀,使其容积不断增大,请根据表格中的数据找出使用次数x 与增大的容积y 之间的关系.
常见非线性回归模型 1.简非线性模型简介 非线性回归模型在经济学研究中有着广泛的应用。有一些非线性回归模型可以通 过直接代换或间接代换转化为线性回归模型,但也有一些非线性回归模型却无 法通过代换转化为线性回归模型。 柯布—道格拉斯生产函数模型 y AKL 其中L和K分别是劳力投入和资金投入, y是产出。由于误差项是可加的, 从而也不能通过代换转化为线性回归模型。 对于联立方程模型,只要其中有一个方程是不能通过代换转化为线性,那么这个联立方程模型就是非线性的。 单方程非线性回归模型的一般形式为 y f(x1,x2, ,xk; 1, 2, , p) 2.可化为线性回归的曲线回归 在实际问题当中,有许多回归模型的被解释变量y与解释变量x之间的关系都不是线性的,其中一些回归模型通过对自变量或因变量的函数变换可以转化为
线性关系,利用线性回归求解未知参数,并作回归诊断。如下列模型。 (1)y 0 1e x (2)y 0 1x2x2p x p (3)y ae bx (4)y=alnx+b 对于(1)式,只需令x e x即可化为y对x是线性的形式y01x,需要指出的是,新引进的自变量只能依赖于原始变量,而不能与未知参数有关。 对于(2)式,可以令x1=x,x2=x2,?,x p=x p,于是得到y关于x1,x2,?, x p 的线性表达式y 0 1x12x2 pxp 对与(3)式,对等式两边同时去自然数对数,得lnylnabx ,令 y lny, 0 lna, 1 b,于是得到y关于x的一元线性回归模型: y 0 1x。 乘性误差项模型和加性误差项模型所得的结果有一定差异,其中乘性误差项模型认为yt本身是异方差的,而lnyt是等方差的。加性误差项模型认为yt是等 方差的。从统计性质看两者的差异,前者淡化了y t值大的项(近期数据)的作用, 强化了y t值小的项(早期数据)的作用,对早起数据拟合得效果较好,而后者则 对近期数据拟合得效果较好。 影响模型拟合效果的统计性质主要是异方差、自相关和共线性这三个方面。 异方差可以同构选择乘性误差项模型和加性误差项模型解决,必要时还可以使用 加权最小二乘。
第 1 页 实验十一 非线性系统的相平面分析 一、实验目的 (1)掌握非线性系统的模拟方法。 (2)用相平面分析法分析继电型非线性系统、饱和型非线性系统的瞬态响应和稳态误差。 二、实验设备 序 号 型 号 备 注 1 DJK01 电源控制屏 该控制屏包含“三相电源输出”等几个模块。 2 DJK15控制理论实验挂箱 或DJK16控制理论实验挂 箱 3 慢扫描示波器 4 万用表 三、实验线路及原理 相平面法是分析一阶和二阶非线性系统的有效方法。通过作出的相轨迹,就能直观的知道系统的运动情况。 图11-1 非线性控制系统
第 2 页 图11-2 理想继电器特性的模拟线路图 图11-1为一具有理想继电器特性的非线性系统的框图,图11-2为理想继电器特性的具体接线参考图。由图11-1得 Km C C =+。 。。 ,0, 0m e m m e >?=??=?+e KM C C e KM C C 令 r(t) = R,则 r(t)=0。因为 r –c =e, 所以e = -c 。于是上式改写为 ) ,(),(。。。。。。0000<=?+>=++e KM e e e KM e e
第 3 页 初始条件 e(0)= r(0)- c(0)=R ,用等倾线法作出该系统的相轨迹如图11-3所示。由图可见,系统从初始点A 出发,最后运动到坐标原点。这不仅表明该系统稳定,而且由图还能确定系统的超调量δ%=0F/0A ×100%。和稳定误差为零等性能指标。 图11-3 四、思考题 (1)实验中如何获得c 和c 的信号?如何获得e 和e 的信号? (2)试说明e ?e 相轨迹和c ?c 相轨迹间的关系。 (3)你是如何从相平面图上得到超调量σρ和稳态误差ess 的? 五、实验方法 (1)用相轨迹分析图8-54所示的具有理想继电器特性的非线性系统在阶跃信号作用下的瞬态响应和稳态误差。 ①根据图8-54设计相应的实验线路图,其中M=5V,K=1。 ②在系统的输入分别为3V 和1V 时,用示波器观察系统e ?e
实验二离散控制系统分析方法 一、实验目的 利用MATLAB对各种离散控制系统进行时域分析。 二、实验指导 1.控制系统的稳定性分析 由前面章节学习的内容可知,对线性系统而言,如果一个连续系统的所有极点都位于s平面的左半平面,则该系统是一个稳定系统。对离散系统而言,如果一个系统的全部极点都位于z平面的单位圆内部,则该系统是一个稳定系统。一个连续的稳定系统,如果所有的零点都位于s平面的左半平面,即所有零点的实部小于零,则该系统是一个最小相位系统。一个离散的稳定系统,如果所有零点都位于z平面的单位圆内,则称该系统是一个最小相位系统。由于Matlab提供了函数可以直接求出控制系统的零极点,所以使用Matlab判断一个系统是否为最小相位系统的工作就变得十分简单。 2.控制系统的时域分析 时域分析是直接在时间域对系统进行分析。它是在一定输入作用下,求得输出量的时域表达式,从而分析系统的稳定性、动态性能和稳态误差。这是一种既直观又准确的方法。 Matlab提供了大量对控制系统的时域特征进行分析的函数,适用于用传递函数表示的模型。其中常用的函数列入表1,供学生参考。
例1.z z z H 5.05 .1)(2+= 试绘出其单位阶跃响应及单位斜波输入响应。 解:为求其单位阶跃响应及单位斜波输入响应,编制程序如下: num=[1.5]; den=[1 0.5 0];sysd=tf(num,den,0.1) [y,t,x]=step(sysd); subplot(1,2,1) plot(t,y); xlabel('Time-Sec'); ylabel('y(t)'); gtext('单位阶跃响应') grid; u=0:0.1:1; subplot(1,2,2) [y1,x]=dlsim(num,den,u); plot(u,y1) xlabel('Time-Sec'); ylabel('y(t)'); gtext('单位速度响应') grid 二、 实验内容 1、MATLAB 在离散系统的分析应用 对于下图所示的计算机控制系统结构图1,已知系统采样周期为T=0.1s ,被
实验六用SPSS进行非线性回归分析 例:通过对比12个同类企业的月产量(万台)与单位成本(元)的资料(如图1),试配合适当的回归模型分析月产量与单位成本之间的关系
图1原始数据和散点图分析 一、散点图分析和初始模型选择 在SPSS数据窗口中输入数据,然后插入散点图(选择Graphs→Scatter命令),由散点图可以看出,该数据配合线性模型、指数模型、对数模型和幂函数模型都比较合适。进一步进行曲线估计:从Statistic下选Regression菜单中的Curve Estimation命令;选因变量单位成本到Dependent框中,自变量月产量到Independent框中,在Models框中选择Linear、Logarithmic、Power和Exponential四个复选框,确定后输出分析结果,见表1。 分析各模型的R平方,选择指数模型较好,其初始模型为 但考虑到在线性变换过程可能会使原模型失去残差平方和最小的意义,因此进一步对原模型进行优化。 模型汇总和参数估计值 因变量: 单位成本 方程模型汇总参数估计值 R 方 F df1 df2 Sig. 常数b1 线性.912 104.179 1 10 .000 158.497 -1.727 对数.943 166.595 1 10 .000 282.350 -54.059 幂.931 134.617 1 10 .000 619.149 -.556 指数.955 212.313 1 10 .000 176.571 -.018 自变量为月产量。 表1曲线估计输出结果
二、非线性模型的优化 SPSS提供了非线性回归分析工具,可以对非线性模型进行优化,使其残差平方和达到最小。从Statistic下选Regression菜单中的Nonlinear命令;按Paramaters按钮,输入参数A:176.57和B:-.0183;选单位成本到Dependent框中,在模型表达式框中输入“A*EXP(B*月产量)”,确定。SPSS输出结果见表2。 由输出结果可以看出,经过6次模型迭代过程,残差平方和已有了较大改善,缩小为568.97,误差率小于0.00000001, 优化后的模型为: 迭代历史记录b 迭代数a残差平方和参数 A B 1.0 104710.523 176.570 -.183 1.1 5.346E+133 -3455.813 2.243 1.2 30684076640.87 3 476.032 .087 1.3 9731 2.724 215.183 -.160 2.0 97312.724 215.183 -.160 2.1 83887.036 268.159 -.133 3.0 83887.036 268.159 -.133 3.1 59358.745 340.412 -.102 4.0 59358.745 340.412 -.102 4.1 26232.008 38 5.967 -.065 5.0 26232.008 385.967 -.065 5.1 7977.231 261.978 -.038 6.0 797 7.231 261.978 -.038 6.1 1388.850 153.617 -.015 7.0 1388.850 153.617 -.015 7.1 581.073 180.889 -.019 8.0 581.073 180.889 -.019 8.1 568.969 182.341 -.019 9.0 568.969 182.341 -.019 9.1 568.969 182.334 -.019 10.0 568.969 182.334 -.019 10.1 568.969 182.334 -.019 导数是通过数字计算的。 a. 主迭代数在小数左侧显示,次迭代数在小数右侧显示。 b. 由于连续残差平方和之间的相对减少量最多为SSCON = 1.000E-008,因此在 22 模型评估和 10 导数评估之后,系统停止运行。
回归分析的初步应用(教案) ——探究非线性回归模型 一、教材分析 1. 教材的地位与作用: “回归分析的初步应用”是人民教育出版社A版《数学选修2-3》统计案例一章的内容,是《必修3》“线性回归分析”的延伸。根据高中课程标准,这里准备安排4个课时,本次说课的内容为第3课时。 虽然线性回归分析具有广泛的应用,但是大量实际问题的两个变量不一定都呈线性相关关系,所以有必要探究如何建立非线性回归模型,进行更有效的数据处理。 2. 教学重点、难点: 教学重点:探究用线性回归模型研究非线性回归模型。 教学难点:如何选择不同的模型建模,以及如何将非线性回归模型转化为线性回归模型。 二、学情分析 教学对象是高二的学生,通过前面的学习,具有一定的线性回归分析、相关指数和残差分析的知识,这为探究非线性模型奠定了良好的基础,但由于学生较少接触数学建模的思想,思路不够开阔,为模型间的转化带来了一定的困难。 三、教学目标 知识与技能目标:能根据散点图的特点选择回归模型,通过函数变换,借助线性回归模型研究非线性回归模型。 过程与方法目标:经历非线性回归模型的探索过程,掌握建立非线性模型的基本步骤,体会统计方法的特点。 情感、态度与价值观:以探究问题为中心,感受研究非线性回归模型的必要意义,体验数学的文化内涵,形成学习数学的积极态度。 四、教学方法 1. 教法分析 主要采用“引导发现,合作探究”的教学方法,通过组织学生观察、分析、计算、交流、归纳,让学生在探究学习的过程中经历知识形成的全过程。 利用多媒体辅助教学,优化了教学过程,大大提高了课堂教学效率。 2.学法分析 重点指导学生通过观察思考、类比联想,形成“自主探究、合作交流”的学习形式,培养学生从“学会知识”到“会学知识”。
非线性回归分析(转载) (2009-10-23 08:40:20) 转载 分类:Web分析 标签: 杂谈 在回归分析中,当自变量和因变量间的关系不能简单地表示为线性方程,或者不能表示为可化为线性方程的时侯,可采用非线性估计来建立回归模型。 SPSS提供了非线性回归“Nonlinear”过程,下面就以实例来介绍非线性拟合“Nonlinear”过程的基本步骤和使用方法。 应用实例 研究了南美斑潜蝇幼虫在不同温度条件下的发育速率,得到试验数据如下: 表5-1 南美斑潜蝇幼虫在不同温度条件下的发育速率 温度℃17.5 20 22.5 25 27.5 30 35 发育速率0.0638 0.0826 0.1100 0.1327 0.1667 0.1859 0.1572 根据以上数据拟合逻辑斯蒂模型: 本例子数据保存在DATA6-4.SAV。 1)准备分析数据 在SPSS数据编辑窗口建立变量“t”和“v”两个变量,把表6-14中的数据分别输入“温度”和“发育速率”对应的变量中。 或者打开已经存在的数据文件(DATA6-4.SAV)。 2)启动线性回归过程 单击SPSS主菜单的“Analyze”下的“Regression”中“Nonlinear”项,将打开如图5-1
所示的线回归对话窗口。 图5-1 Nonlinear非线性回归对话窗口 3) 设置分析变量 设置因变量:从左侧的变量列表框中选择一个因变量进入“Dependent(s)”框。本例子选“发育速率[v]”变量为因变量。 4) 设置参数变量和初始值 单击“Parameters”按钮,将打开如图6-14所示的对话框。该对话框用于设置参数的初始值。 图5-2 设置参数初始值
第2章 电路的分析方法 本章要求: 1. 掌握支路电流法、叠加原理和戴维宁定理等电路的基本分析方法。 2. 理解实际电源的两种模型及其等效变换。 3. 了解非线性电阻元件的伏安特性及静态电阻、动态电阻的概念,以及简单非线性电阻电路的图解分析法。 重点: 1. 支路电流法; 2. 叠加原理; 3.戴维宁定理。 难点: 1. 电流源模型; 2. 结点电压公式; 3. 戴维宁定理。 2.1 电阻串并联联接的等效变换 1.电阻的串联 特点: 1)各电阻一个接一个地顺序相联; 2)各电阻中通过同一电流; 3)等效电阻等于各电阻之和; 4)串联电阻上电压的分配与电阻成正比。 两电阻串联时的分压公式: 2.电阻的并联 特点: 1)各电阻联接在两个公共的结点之间; 2)各电阻两端的电压相同; 3)等效电阻的倒数等于各电阻倒数之和; 4)并联电阻上电流的分配与电阻成反比。 U R R R U 2111+=U R R R U 2 122+=
两电阻并联时的分流公式: 2.3 电源的两种模型及其等效变换 1.电压源 电压源是由电动势 E 和内阻 R 0 串联的电源的电路模型。若 R 0 = 0,称为理想电压源。 特点: (1) 内阻R 0 = 0; (2) 输出电压是一定值,恒等于电动势(对直流电压,有 U ≡ E ),与恒压源并联的电路电压恒定; (3) 恒压源中的电流由外电路决定。 2.电流源 电流源是由电流 I S 和内阻 R 0 并联的电源的电路模型。若 R 0 = ∞,称为理想电流源。 特点: (1) 内阻R 0 = ∞ ; (2) 输出电流是一定值,恒等于电流 I S ,与恒流源串联的电路电流恒定; (3) 恒流源两端的电压 U 由外电路决定。 3.电压源与电流源的等效变换 等效变换条件: E = I S R 0 0 R E I = S 注意: ① 电压源和电流源的等效关系只对外电路而言,对电源内部则是不等效的。 ② 等效变换时,两电源的参考方向要一一对应。 ③ 理想电压源与理想电流源之间无等效关系。 ④ 任何一个电动势 E 和某个电阻 R 串联的电路,都可化为一个电流为 I S 和这个电阻并联的电路。 4.电源等效变换法 (1) 分析电路结构,搞清联接关系; (2) 根据需要进行电源等效变换; (3) 元件合并化简:电压源串联合并,电流源并联合并,电阻串并联合并; I R R R I 2121+=I R R R I 2 112+=
高频电子线路 课程论文 论文题目:非线性电路的分析方法研究 专业:08电子信息工程本科 小组成员: DZU Joecindy 指导老师:王丽 完成时间:2011年12月22日 非线性电路的分析方法研究 【摘要】我们要将电路元件的范围及其相应的分析方法进行拓展,引入对非线性二端元件的分析和总结。非线性二端元件就是接线端自变量和接线端的函数具有非线性关系的元件。
下面我们将对非线性电路的分析方法进行研究,从而对其分类和总结。 【关键词】非线性电路 直接分析法 数值分析法 图形分析法 分段线性分析法 小信号分析法 前 言 到目前为止,我们已经学习过若干种线性元件的电路,也学习过这些元件构成的线性电路分析法。本文将就非线性问题进行分类和归纳总结。 1.直接分析法 此方法一般应用于对非线性二端元件的函数关系较简单时使用,结合并运用线性元件电路的分析方法和一些定理,同时列写出非线性的补充方程,最后通过求解数学问题并结合电路实际解答的方法。 我们首先用直接分析法求解图1.1所示的简单非线性电阻电路。假设图中非线性电阻的特性可表示为下列v-i 关系: 2,00,0 D D D D Kv v i v ?>=?≤? 常熟K 大于零。 D i 图1.1 该电路的求解过程:
(D v -E )/R +D i = 0 (1.1) 补充方程: D i = K D v 2 (1.2) 注意该元件在D v 大于零的时候才能工作。如果D v <0 则 D i = 0 用原件的非线性v-i 关系替换式(1.1)中的D i 就得到了用节点电压表示的节点方程: (D v -E )/R + Kv D 2 = 0 (1.3) 化简式(1.3),得到下列二次方程: RK D v 2 + D v – E = 0 求出D v 并选择正解,即: D v = (1.4) 对应的i D 表达式可通过将上式替换式(1.2)得到,即: D i = 12K RK ?-+ ?? 小结:这类分析方法很有局限性,通常只适用于函数关系较简单的非线性求解问题,对于较复杂的问题,下面我们将讨论到。 2.数值分析法 当所求非线性的函数关系不是简单的函数关系时,已经不能用已有的公式去求解,这是就需要在误差精度允许的范围内,运用计算方法学的知识寻求所需的解,下面介绍常用到的计算方法: 在《电路基理论基础》一书中给出的3种方法: ① 前向欧拉法(Forward Euler method ): (以后本文均以(,)dy f y x dx =表示dy dx ) 1k y + = k y + h f (k y , k x ) 其中h 为积分步长 ② 后向欧拉法 (Backward Euler method )