
四、五、
、. 六、规格、型号
主要技术性能?
工作原理与结构说明.
电动执行器的检查与调整?
电动执行器的安装使用?
13
15
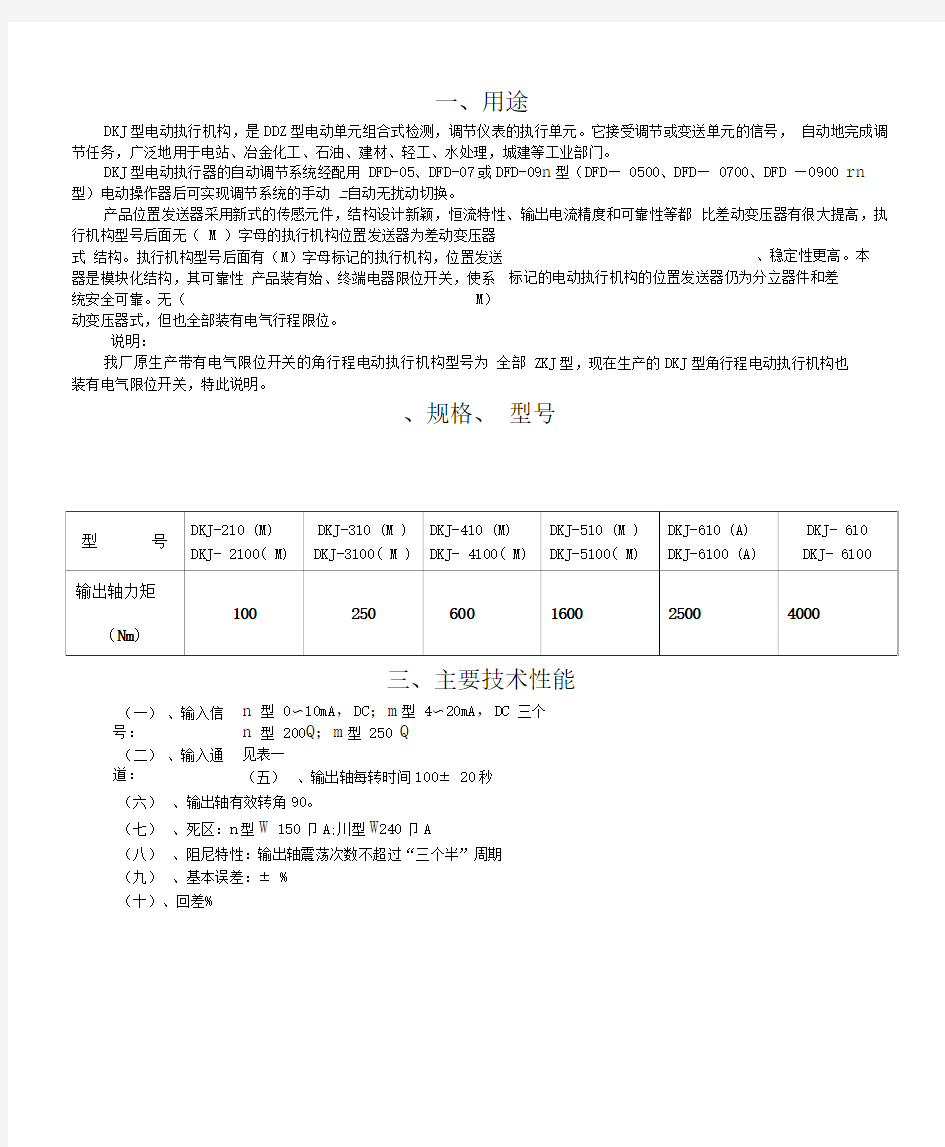
一、用途
DKJ 型电动执行机构,是DDZ 型电动单元组合式检测,调节仪表的执行单元。它接受调节或变送单元的信号, 自动地完成调节任务,广泛地用于电站、冶金化工、石油、建材、轻工、水处理,城建等工业部门。
DKJ 型电动执行器的自动调节系统经配用 DFD-05、DFD-07或DFD-09n 型(DFD — 0500、DFD — 0700、DFD —0900 rn 型)电动操作器后可实现调节系统的手动 二自动无扰动切换。
产品位置发送器采用新式的传感元件,结构设计新颖,恒流特性、输出电流精度和可靠性等都 比差动变压器有很大提高,执行机构型号后面无( M )字母的执行机构位置发送器为差动变压器
式 结构。执行机构型号后面有(M )字母标记的执行机构,位置发送
器是模块化结构,其可靠性 产品装有始、终端电器限位开关,使系统安全可靠。无( M )
动变压器式,但也全部装有电气行程限位。
说明:
我厂原生产带有电气限位开关的角行程电动执行机构型号为 全部装有电气限位开关,特此说明。
三、主要技术性能
n 型 0?10mA ,DC ;m 型 4?20mA ,DC 三个 n 型 200Q ;m 型 250 Q 见表一 (五) 、输出轴每转时间100± 20秒
(六) 、输出轴有效转角90。
(七) 、死区:n 型W 150卩A ;川型W 240卩A
(八) 、阻尼特性:输出轴震荡次数不超过“三个半”周期
(九) 、基本误差:± %
(十)、回差%
、稳定性更高。本 标记的电动执行机构的位置发送器仍为分立器件和差 ZKJ 型,现在生产的DKJ 型角行程电动执行机构也 、规格、 型号
(一) 、输入信
号:
(二) 、输入通
道:
(^一)、电源电压:200V?50Hz
(十二)、使用环境温度:放大器:0—500C
执行器:-25—+700C
(十三)、使用环境相对湿度:
放大器:10%?70%
执行器:W 95%
四、工作原理与结构说明
DKJ型电动执行器是一个用两相交流伺服电动机为原动机的位置伺服机构,其系统方块图如图一所示:
PT TI
电动执行器系统方块图
n当输入端有一个信号输入时,此信号与位置的反馈信号进行比较,实际是输入信号电流在控制输入绕组中流过所产生的磁通与极性相反的位置反馈电流在反馈绕组中流过所产生的磁通进行代数相加,比较后的偏差信号经过放大,使
功率级有足够的功率输出,以驱动两相伺服电动机的转动,使减速器的输出轴朝着减小这一偏差信号的方向转动,直到这种偏差信号小于死区为止,此时输出轴就稳定在与输入信号相对应转角位置上.
由于电动机带有制动装置,能保证在电机断电以后迅速地制动,从而限制输出轴的惯性惰走,克服负载反作用力矩的影响,改善系统的稳定性.
系统位置反馈回路中串接直流毫安表,测量位置发送器的输出电流以间接指示阀位的开度,现将电动执行
器各部分原理(原理图见图2)简述如下:
(一)伺服放大器:伺服放大器采用交流无触点开关量输出,其结构有挂墙式或盘装式.通用型伺服放大器可以与DKJ-210(2100)?DK—610A(6100A执行机构配套使用.但DK—6100执行机构由于是双电机驱动,惯性大必需要用带有电制动功能的多功能放大器GAMX位置定位器),GAMX也可与其它规格配套使用.GAMX还有断信号保护功能等.详见GAMX说明书.
放大器电路原理图见图2.
伺服放大器与执行机构分别单独安装,放大器安装在室内,执行机构在现场安装.一般放大器单独定货,我厂可以
成套供应.
220V
X_J
图.2
伺服放大器原理图
二)执行机构:
执行机构是由电动机及角位移发送器和减速器组成的.
电动机
伺服电动机采用鼠笼式两相交流伺服电动机,定子上均布着两个相差90°电角度的定子绕组(匝数线径相同)分别和伺服放大器的二组主回路相连,借分相电容使两个绕组互为激磁相和控制相, 其合成产生定子旋转磁场, 定子旋转磁场在鼠笼转子内产生转子电流与旋转磁场相互作用,在转子导体
上就有电磁力,电磁力产生电磁转矩,使转子旋转.旋转方向取决于定子的两个绕组的电压相位上谁超前.由于转子电阻较(大,两相伺服电动机具有较大的起动转矩和软的机械特性.
伺服电动机内装有制动器,用来限制电动机在断电后转子和减速器的输出轴的惯性惰走及负载反作用力矩的影响,使减速器的输出轴准确地停在相应位置上.
目前,我厂生产的伺服电动机的制动器均采用杠杆傍磁式.但后面的制动结构又分两种(1)DKJ-510 型制动器见图例3-A;(2)DKJ-21A410,610,610A型制动器见图3-B.
⑴DKJ-510型制动器.
图3-A 型杠杆式制动结构是在电动机定子的一端装有两块杠杆衔铁,电机通电时,利用定子磁声,使衔铁吸服在定子内表面,使杠杆另一端产生缶电机轴的位,借助杠杆这端装有的梯形楔板斜面,将制动闸瓦顶开,使其
与定在电机轴上的制动轮脱, 机以额定转速旆转.当电机断电以后,定子磁声消失, 衔铁放,制动闸瓦则由弹簧的
压力而抑紧制动轮,使电机制动.在制动闸瓦上装有调节螺钵,可调节制动闸瓦和制动轮之间的相对位置(即衔铁和
定子之间的距离)以保证可靠地吸合和制动.这里应当特别注意的是在调整调节好的状态破坏.并
定时检查调整以保证制动器可靠地吸合与制动.
(2) DKJ--21A ,610A 型制动器:
图3—B,这种制动器结构与DKJ-510型制动器不同的是衔铁所带动的杠杆不是作用在楔块上,而是托起制动盘,使制动轮脱开,当电机断电时, 衔铁被释放,在弹簧作用下,制动盘压在制动轮上制动电机.
制动盘两端的螺钉可调整,改变制动盘与制动轮的间隙,两导杆上的螺母可调整弹簧压力以改变制动力矩.
制动器后罩装有手反,将手反旆在手动位置,制动秀与制动轮脱开,执行器可手操作,将手反旆在自动位置,即可保证断电时电动机制动.
2.减速器:减速器的结构是采用一级渐开线直齿轮和一级少齿差行星传动.
付动机构具有体积小,传动大,效率高,噪音小,寿命长等优点.其中少齿差结构基本部件是由渐开线内齿轮,行星轮,偏心套和联轴器等组成.传动理是偏心套的转动使行星轮与内齿轮啮合作行星运动(即星轮的轴
心绕内齿轮轴心作公转,行星轮绕自轴心作自转)利用内齿轮齿数Z2与行星轮齿数乙,差的很少.当偏心套带动行星
轮转动时,行星轮绕偏心轴中心所作的运动为反向低速自转运动,行星轮的自转速度很慢,将行星轮的自转通过轴和
联轴器变成输出轴的输出传动.传动结构示意图见图4-A,电位器式及差动变压器式.
减速器上均有操作手轮供就地调整和操作用.
3.模块位置发送器
?r $ TrTTT?顶 ?
”他91 h?4)f ??? Zt YkO* IL ??0Lt*6 1**4'? 紐; 2 ?"利? ifcy II”呷I 匹$ I ■“ T il
相关主题
文本预览