
第一章线性规划1、 由图可得:最优解为 2、用图解法求解线性规划: Min z=2x1+x2 ? ? ? ? ? ? ? ≥ ≤ ≤ ≥ + ≤ + - 10 5 8 24 4 2 1 2 1 2 1 x x x x x x 解: 由图可得:最优解x=1.6,y=6.4
Max z=5x 1+6x 2 ? ?? ??≥≤+-≥-0 ,23222212 121x x x x x x 解: 由图可得:最优解Max z=5x 1+6x 2, Max z= + ∞
Maxz = 2x 1 +x 2 ????? ? ?≥≤+≤+≤0,5242261552121211x x x x x x x 由图可得:最大值?????==+35121x x x , 所以?????==2 3 21x x max Z = 8.
12 12125.max 2328416412 0,1,2maxZ .j Z x x x x x x x j =+?+≤? ≤?? ≤??≥=?如图所示,在(4,2)这一点达到最大值为2 6将线性规划模型化成标准形式: Min z=x 1-2x 2+3x 3 ????? ??≥≥-=++-≥+-≤++无约束 321 321321321,0,05232 7x x x x x x x x x x x x 解:令Z ’=-Z,引进松弛变量x 4≥0,引入剩余变量x 5≥0,并令x 3=x 3’-x 3’’,其中x 3’≥ 0,x 3’’≥0 Max z ’=-x 1+2x 2-3x 3’+3x 3’’ ????? ? ?≥≥≥≥≥≥-=++-=--+-=+-++0 ,0,0'',0',0,05 232 '''7'''543321 3215332143321x x x x x x x x x x x x x x x x x x x
1.2根据题1.2图所示的电动机速度控制系统工作原理 (1)将a,b 与c,d 用线连接成负反馈系统; ( 2)画出系统 框图。 c d + - 发电机 解: (1) a 接d,b 接c. (2) 系 统 框 图 如下 1.3题1.3图所示为液位自动控制系统原理示意图。在任何情况下,希望页面高度c 维持不变,说明系统工作原理并画出系统框图。
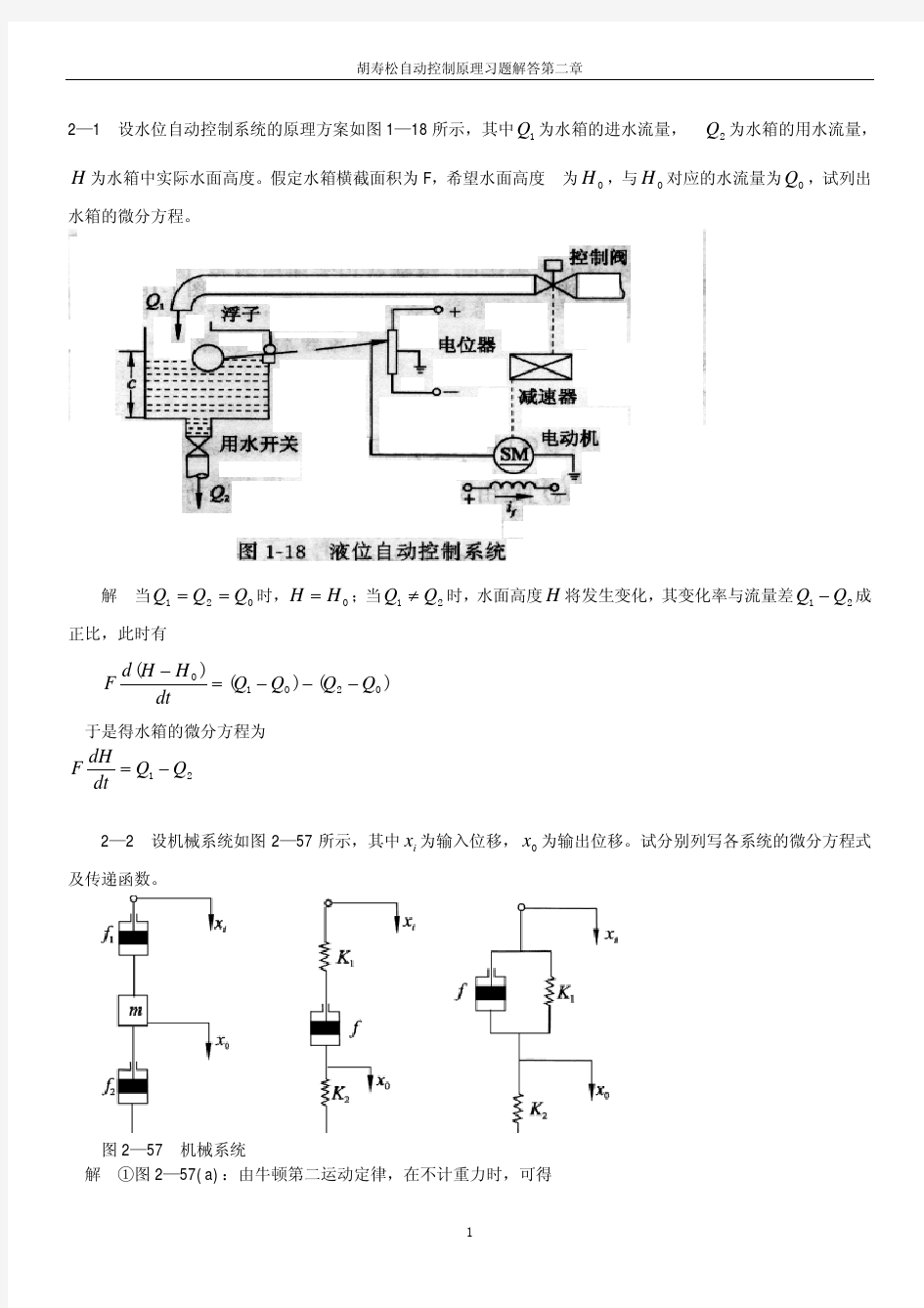
解: 工作原理:当打开用水开关时,液面下降,浮子下降,从而通过电位器分压,使得电动机两端出现正向电压,电动机正转带动减速器旋转,开大控制阀,使得进水量增加,液面上升。同理,当液面上升时,浮子上升,通过电位器,使得电动机两端出现负向电压,从而带动减速器反向转动控制阀,减小进水量,从而达到稳定液面的目的。 系统框图如下: 2.1试求下列函数的拉式变换,设t<0时,x(t)=0: (1) x(t)=2+3t+4t 2 解: X(S)= s 2 +23s +38 s
(2) x(t)=5sin2t-2cos2t 解:X(S)=5 422+S -242+S S =4 2102+-S S (3) x(t)=1-e t T 1- 解:X(S)=S 1- T S 11+ = S 1-1 +ST T = ) 1(1 +ST S (4) x(t)=e t 4.0-cos12t 解:X(S)=2 212 )4.0(4 .0+++S S 2.2试求下列象函数X(S)的拉式反变换x(t): (1) X(S)= ) 2)(1(++s s s 解:= )(S X )2)(1(++s s s =1 122+-+S S t t e e t x ---=∴22)( (2) X(S)=) 1(1 522 2++-s s s s 解:=)(S X ) 1(1522 2++-s s s s =15 12+-+S S S
第一章 习题答案 习 题 1-1 根据题1-1图所示的电动机速度控制系统工作原理图 (1) 将a ,b 与c ,d 用线连接成负反馈状态; (2) 画出系统方框图。 1-2 题1-2图是仓库大门自动控制系统原理示意图。试说明系统自动控制大门开闭的工作原理,并画出系统方框图。 题1-2图 仓库大门自动开闭控制系统 1-3 题1-3图为工业炉温自动控制系统的工作原理图。分析系统的工作原理,指出 被控对象、被控量和给定量,画出系统方框图。 题1-3图 炉温自动控制系统原理图 1-4 题1-4图是控制导弹发射架方位的电位器式随动系统原理图。图中电位器1P 、2 P
并联后跨接到同一电源0 E 的两端,其滑臂分别与输入轴和输出轴相联结,组成方位角的给定元件和测量反馈元件。输入轴由手轮操纵;输出轴则由直流电动机经减速后带动,电动机采用电枢控制的方式工作。 试分析系统的工作原理,指出系统的被控对象、被控量和给定量,画出系统的方框图。 题1-4图导弹发射架方位角控制系统原理图 1-5 采用离心调速器的蒸汽 机转速控制系统如题1-5图所示。 其工作原理是:当蒸汽机带动负载 转动的同时,通过圆锥齿轮带动一 对飞锤作水平旋转。飞锤通过铰链 可带动套筒上下滑动,套筒装有平 衡弹簧,套筒上下滑动时可拨动杠 杆,杠杆另一端通过连杆调节供汽 阀门的开度。在蒸汽机正常运行 时,飞锤旋转所产生的离心力与弹簧的反弹力相平衡,套筒保持某个高度,使阀门处于一个平衡位置。如果由于负载增大使蒸汽机转速 ω下降,则飞锤因离心力减小而使套筒向下滑动,并通过杠杆增大供汽阀门的开度,从而使蒸汽机的转速回升。同理,如果由于负载减小使蒸汽机的转速 ω增加,则飞锤因离心力增加而使套筒上滑,并通过杠杆减小供汽阀门的开度,迫使蒸汽机转速回落。这样,离心调速器就能自动地抵制负载变化对转速的影响,使蒸汽机的转速 ω保持在某个期望值附近。 指出系统中的被控对象、被控量和给定量,画出系统的方框图。 1-6 摄像机角位置自动跟踪系统如题1-6图所示。当光点显示器对准某个方向时,摄像机会自动跟踪并对准这个方向。试分析系统的工作原理,指出被控对象、被控量及给定量,画出系统方框图。 题1-5图蒸汽机转速自动控制系统
1. 采样系统结构如图所示,求该系统的脉冲传递函数。 答案:该系统可用简便计算方法求出脉冲传递函数。去掉采样开关后的连续系统输出表达式为 对闭环系统的输出信号加脉冲采样得 再对上式进行变量替换得 2. 已知采样系统的结构如图所示,,采样周期T=0.1s。试求系统稳定时K的取值范围。 答案:首先求出系统的闭环传递函数。由 求得,已知T=0.1s, e-1=0.368,故
系统闭环传递函数为,特征方程为 D(z)=1+G(z)=z2+(0.632K-1.368)z+0.368=0 将双线性变换代入上式得 0.632ω2+1.264ω+(2.736-0.632K)=0 要使二阶系统稳定,则有 K>0,2.736-0.632K>0 故得到K的取值范围为0<K<4.32。 3. 求下列函数的z变换。 (1). e(t)=te-at 答案:e(t)=te-at 该函数采样后所得的脉冲序列为 e(nT)=nTe-anT n=0,1,2,… 代入z变换的定义式可得 E(z)=e(0)+P(T)z-1+e(2T)z-2+…+e(nT)z-n+…=0+Te-aT z-1+2Te-2aT z-2+…+nTe-naT z-n+…=T(e-aT z-1+2e -2aT z-2+…+ne-naT z-n+…) 两边同时乘以e-aT z-1,得 e-aT z-1E(z)=T(e-2aT z-2+2e-3aT z-3+…+ne-a(n+1)T z-(n+1)+…) 两式相减,若|e-aT z-1|<1,该级数收敛,同样利用等比级数求和公式,可得 最后该z变换的闭合形式为 (2). e(t)=cosωt 答案:e(t)=cosωt 对e(t)=cosωt取拉普拉斯变换.得 展开为部分分式,即 可以得到 化简后得
1 课程:管理运筹学 管理运筹学作业 第二章线性规划的图解法 P23:Q2:(1)-(6);Q3:(2) Q2:用图解法求解下列线性规划问题,并指出哪个问题具有唯一最优解,无穷多最优解,无界解或无可行解。 (1)Min f=6X1+4X2 约束条件:2X1+X2>=1, 3X1+4X2>=3 X1, X2>=0 解题如下:如图1 Min f=3.6 X1=0.2, X2=0.6 本题具有唯一最优解。 图1 (2)Max z=4X1+8X2 约束条件:2X1+2X2<=10 -X1+X2>=8 X1,X2>=0 解题如下:如图2: Max Z 无可行解。 图2 1
2 2 (3) Max z =X1+X2 约束条件 8X1+6X2>=24 4X1+6X2>=-12 2X2>=4 X1,X2>=0 解题如下:如图3: Max Z=有无界解。 图3 (4) Max Z =3X1-2X2 约束条件:X1+X2<=1 2X1+2X2>=4 X1,X2>=0 解题如下:如图4: Max Z 无可行解。 图 4
3 (5)Max Z=3X1+9X2 约束条件:X1+3X2<=22 -X1+X2<=4 X2<=6 2X1-5X2<=0 X1,X2>=0 解题如下:如图5: Max Z =66;X1=4 X2=6 本题有唯一最优解。 图5 (6)Max Z=3X1+4X2 约束条件:-X1+2X2<=8 X1+2X2<=12 2X1+X2<=16 2X1-5X2<=0 X1,X2>=0 解题如下:如图6 Max Z =30.669 X1=6.667 X2=2.667 本题有唯一最优解。 3
《自动控制原理》习题参考答案 第1章 1.7.2基础部分 1.答:开环控制如:台灯灯光调节系统。 其工作原理为:输入信号为加在台灯灯泡两端的电压,输出信号为灯泡的亮度,被控对象为灯泡。当输入信号增加时,输出信号(灯泡的亮度)增加,反之亦然。 闭环控制如:水塔水位自动控制系统。 其工作原理为:输入信号为电机两端电压,输出信号为水塔水位,被控对象为电机调节装置。当水塔水位下降时,通过检测装置检测到水位下降,将此信号反馈至电机,电机为使水塔水位维持在某一固定位置增大电机两端的电压,通过调节装置调节使水塔水位升高。反之亦然。 2.答:自动控制理论发展大致经历了几个阶段: 第一阶段:本世纪40~60年代,称为“经典控制理论”时期。 第二阶段:本世纪60~70年代,称为“现代控制理论”时期。 第三阶段:本世纪70年代末至今,控制理论向“大系统理论”和“智能控制”方向发展。 3.答:开环控制:控制器与被空对象之间只有正向作用而没有反馈控制作用,即系统的输 出量与对控制量没有影响。 闭环控制:指控制装置与被空对象之间既有正向作用,又有反向联系控制的过程。 开环控制与闭环控制的优缺点比较: 对开环控制系统来说,由于被控制量和控制量之间没有任何联系,所以对干扰造成的误差系统不具备修正的能力。 对闭环控制系统来说,由于采用了负反馈,固而被控制量对于外部和内部的干扰都不甚敏感,因此,有不能采用不太精密和成本低廉的元件构成控制质量较高的系统。 4.答:10 线性定常系统;(2)非线性定常系统; (3)非线性时变系统;(4)非线时变系统; 1.7.3 提高部分 1.答:1)方框图: 2)工作原理:假定水箱在水位为给定值c(该给定值与电位器给定电信ur对应),此时浮子处于平衡位置,电动机无控制作用,水箱处于给定水位高度,水的流入量与流出量保持不变。当c增大时,由于进水量一时没变浮子上升,导致c升高,给电信计作用后,使电信计给电动机两端电压减小,电动机带动减齿轮,使控制阀开度减小,使进水量减小,待浮
一、 单项选择题(每小题1分,共20分) 1. 系统和输入已知,求输出并对动态特性进行研究,称为( C ) A.系统综合 B.系统辨识 C.系统分析 D.系统设计 2. 惯性环节和积分环节的频率特性在( A )上相等。 A.幅频特性的斜率 B.最小幅值 C.相位变化率 D.穿越频率 3. 通过测量输出量,产生一个与输出信号存在确定函数比例关系值的元件称为( C ) A.比较元件 B.给定元件 C.反馈元件 D.放大元件 4. ω从0变化到+∞时,延迟环节频率特性极坐标图为( A ) A.圆 B.半圆 C.椭圆 D.双曲线 5. 当忽略电动机的电枢电感后,以电动机的转速为输出变量,电枢电压为输入变量时, 电动机可看作一个( B ) A.比例环节 B.微分环节 C.积分环节 D.惯性环节 6. 若系统的开环传 递函数为2) (5 10+s s ,则它的开环增益为( C ) A.1 B.2 C.5 D.10 7. 二阶系统的传递函数5 2 5)(2++=s s s G ,则该系统是( B ) A.临界阻尼系统 B.欠阻尼系统 C.过阻尼系统 D.零阻尼系统 8. 若保持二阶系统的ζ不变,提高ωn ,则可以( B ) A.提高上升时间和峰值时间 B.减少上升时间和峰值时间 C.提高上升时间和调整时间 D.减少上升时间和超调量 9. 一阶微分环节Ts s G +=1)(,当频率T 1=ω时,则相频特性)(ωj G ∠为( A ) A.45° B.-45° C.90° D.-90° 10.最小相位系统的开环增益越大,其( D ) A.振荡次数越多 B.稳定裕量越大 C.相位变化越小 D.稳态误差越小 11.设系统的特征方程为()0516178234=++++=s s s s s D ,则此系统 ( A ) A.稳定 B.临界稳定 C.不稳定 D.稳定性不确定。 12.某单位反馈系统的开环传递函数为:()) 5)(1(++=s s s k s G ,当k =( C )时,闭环系统临界稳定。 A.10 B.20 C.30 D.40 13.设系统的特征方程为()025103234=++++=s s s s s D ,则此系统中包含正实部特征的个数 有( C ) A.0 B.1 C.2 D.3 14.单位反馈系统开环传递函数为()s s s s G ++=652,当输入为单位阶跃时,则其位置误差为( C ) A.2 B.0.2 C.0.5 D.0.05
管理运筹学 ——管理科学方法谢家平 第一章 第一章 1. 建立线性规划问题要具备三要素:决策变量、约束条件、目标函数。决策变量(Decision Variable)是决策问题待 定的量值,取值一般为非负;约束条件(Constraint Conditions)是指决策变量取值时受到的各种资源条件的限制, 保障决策方案的可行性;目标函数(Objective Function)是决策者希望实现的目标,为决策变量的线性函数表达式, 有的目标要实现极大值,有的则要求极小值。 2.(1)设立决策变量; (2)确定极值化的单一线性目标函数; (3)线性的约束条件:考虑到能力制约,保证能力需求量不能突破有效供给量; (4)非负约束。 3.(1)唯一最优解:只有一个最优点 (2)多重最优解:无穷多个最优解 (3)无界解:可行域无界,目标值无限增大 (4)没有可行解:线性规划问题的可行域是空集 无界解和没有可行解时,可能是建模时有错。 4. 线性规划的标准形式为:目标函数极大化,约束条件为等式,右端常数项bi≥0 , 决策变量满足非负性。 如果加入的这个非负变量取值为非零的话,则说明该约束限定没有约束力,对企业来说不是紧缺资源,所以称为松弛变量;剩余变量取值为非零的话,则说明“≥”型约束的左边取值大于右边规划值,出现剩余量。 5. 可行解:满足约束条件AX =b,X≥0的解,称为可行解。 基可行解:满足非负性约束的基解,称为基可行解。 可行基:对应于基可行解的基,称为可行基。 最优解:使目标函数最优的可行解,称为最优解。 最优基:最优解对应的基矩阵,称为最优基。 6. 计算步骤: 第一步,确定初始基可行解。 第二步,最优性检验与解的判别。 第三步,进行基变换。 第四步,进行函数迭代。 判断方式: 唯一最优解:所有非基变量的检验数为负数,即σj< 0 无穷多最优解:若所有非基变量的检验数σj≤ 0 ,且存在某个非基变量xNk 的检验数σk= 0 ,让其进基,目标函数
第 一 章 1-1 图1-2是液位自动控制系统原理示意图。在任意情况下,希望液面高度c 维持不变,试说明系统工作原理并画出系统方块图。 图1-2 液位自动控制系统 解:被控对象:水箱;被控量:水箱的实际水位;给定量电位器设定水位r u (表征液 位的希望值r c );比较元件:电位器;执行元件:电动机;控制任务:保持水箱液位高度 不变。 工作原理:当电位电刷位于中点(对应 r u )时,电动机静止不动,控制阀门有一定的 开度,流入水量与流出水量相等,从而使液面保持给定高度r c ,一旦流入水量或流出水量 发生变化时,液面高度就会偏离给定高度 r c 。 当液面升高时,浮子也相应升高,通过杠杆作用,使电位器电刷由中点位置下移,从而给电动机提供一定的控制电压,驱动电动机,通过减速器带动进水阀门向减小开度的方向转动,从而减少流入的水量,使液面逐渐降低,浮子位置也相应下降,直到电位器电刷回到中点位置,电动机的控制电压为零,系统重新处于平衡状态,液面恢复给定高度 r c 。 反之,若液面降低,则通过自动控制作用,增大进水阀门开度,加大流入水量,使液面升高到给定高度 r c 。 系统方块图如图所示:
1-10 下列各式是描述系统的微分方程,其中c(t)为输出量,r (t)为输入量,试判断哪些是线性定常或时变系统,哪些是非线性系统 (1) 222 )()(5)(dt t r d t t r t c ++=; (2))()(8) (6)(3)(2 233t r t c dt t dc dt t c d dt t c d =+++; (3) dt t dr t r t c dt t dc t ) (3)()()(+=+; (4)5cos )()(+=t t r t c ω; (5)?∞-++=t d r dt t dr t r t c τ τ)(5)(6)(3)(; (6))()(2 t r t c =; (7)???? ?≥<=.6),(6,0)(t t r t t c 解:(1)因为c(t)的表达式中包含变量的二次项2 ()r t ,所以该系统为非线性系统。 (2)因为该微分方程不含变量及其导数的高次幂或乘积项,且各项系数均为常数,所以该系统为线性定常系统。 (3)该微分方程不含变量及其导数的高次幂或乘积项,所以该系统为线性系统,但第一项 () dc t t dt 的系数为t ,是随时间变化的变量,因此该系统为线性时变系统。 (4)因为c(t)的表达式中r(t)的系数为非线性函数cos t ω,所以该系统为非线性系统。 (5)因为该微分方程不含变量及其导数的高次幂或乘积项,且各项系数均为常数,所以该系统为线性定常系统。 (6)因为c(t)的表达式中包含变量的二次项2()r t ,表示二次曲线关系,所以该系统为非
一、填空题 1 闭环控制系统又称为反馈控制系统。 2 一线性系统,当输入就是单位脉冲函数时,其输出象函数与 传递函数 相同。 3一阶系统当输入为单位斜坡函数时,其响应的稳态误差恒为 时间常数T 。 4 控制系统线性化过程中,线性化的精度与系统变量的 偏移程度 有关。 5 对于最小相位系统一般只要知道系统的 开环幅频特性 就可以判断其稳定性。 6 一般讲系统的位置误差指输入就是 阶跃信号 所引起的输出位置上的误差。 7 超前校正就是由于正相移的作用,使截止频率附近的 相位 明显上升,从而具有较大的 稳定裕度。 8 二阶系统当共轭复数极点位于 +-45度 线上时,对应的阻尼比为0、707。 9 PID 调节中的“P ”指的就是 比例 控制器。 10 若要求系统的快速性好,则闭环极点应距虚轴越_ 远 越好。 11 在水箱水温控制系统中,受控对象为_水箱 ,被控量为_水温 。 12 自动控制系统有两种基本控制方式,当控制装置与受控对象之间只有顺向作用而无反向联系时,称为_ 开环控制方式 ;当控制装置与受控对象之间不但有顺向作用而且还有反向联系时,称为_ 闭环控制方式 ;含有测速发电机的电动机速度控制系统,属于_ 开环控制方式 。 13 稳定就是对控制系统最基本的要求,若一个控制系统的响应曲线为衰减振荡,则该系统_ 稳定 _。判断一个闭环线性控制系统就是否稳定,在时域分析中采用_ 劳斯判据 _;在频域分析中采用_ 奈氏判据 _。 14、传递函数就是指在_ 零 _初始条件下、线性定常控制系统的_ 输入拉式变换 _与_ 输出拉式变换 _之比。 15 设系统的开环传递函数为2(1)(1) K s s Ts τ++,则其开环幅频特性为_ _,相频特性为 _-180-arctan(tw-Tw)/1+tTw _。 16 频域性能指标与时域性能指标有着对应关系,开环频域性能指标中的幅值穿越频率c ω对 应时域性能指标_ 调整时间t _,它们反映了系统动态过程的_快速性 _。 17 复合控制有两种基本形式:即按 输入 的前馈复合控制与按 扰动 的前馈复合控制。 18 信号流图由节点___与___支路_组成。 19 二阶衰减振荡系统的阻尼比ξ的范围为_(0,1)___。 20 两个传递函数分别为G 1(s)与G 2(s)的环节,以并联方式连接,其等效传递函数为()G s ,则G(s)为 G 1(s)+ G 2(s)(用G 1(s)与G 2(s) 表示)。 21 PI 控制器就是一种相位_比例积分___的校正装置。 22 最小相位系统就是指 S 右半平面不存在系统的开环零点与开环极点 。 23对于一个自动控制系统的性能要求可以概括为三个方面:快速性____、_稳定性___与准确性。 24如果根轨迹位于实轴上两个相邻的开环极点之间,则在这两个极点间必定存在_一个分离点 _。
自动控制原理 一、简答题:(合计20分, 共4个小题,每题5分) 1. 如果一个控制系统的阻尼比比较小,请从时域指标和频域指标两方面 说明该系统会有什么样的表现?并解释原因。 2. 大多数情况下,为保证系统的稳定性,通常要求开环对数幅频特性曲 线在穿越频率处的斜率为多少?为什么? 3. 简要画出二阶系统特征根的位置与响应曲线之间的关系。 4. 用根轨迹分别说明,对于典型的二阶系统增加一个开环零点和增加一 个开环极点对系统根轨迹走向的影响。 二、已知质量-弹簧-阻尼器系统如图(a)所示,其中质量为m 公斤,弹簧系数为k 牛顿/米,阻尼器系数为μ牛顿秒/米,当物体受F = 10牛顿的恒力作用时,其位移y (t )的的变化如图(b)所示。求m 、k 和μ的值。(合计20分) F ) t 图(a) 图(b) 三、已知一控制系统的结构图如下,(合计20分, 共2个小题,每题10分) 1) 确定该系统在输入信号()1()r t t =下的时域性能指标:超调量%σ,调 节时间s t 和峰值时间p t ; 2) 当()21(),()4sin3r t t n t t =?=时,求系统的稳态误差。
四、已知最小相位系统的开环对数幅频特性渐近线如图所示,c ω位于两个交接频率的几何中心。 1) 计算系统对阶跃信号、斜坡信号和加速度信号的稳态精度。 2) 计算超调量%σ和调节时间s t 。(合计20分, 共2个小题,每题10分) [ 1 %0.160.4( 1)sin σγ =+-, s t = 五、某火炮指挥系统结构如下图所示,()(0.21)(0.51) K G s s s s = ++系统最 大输出速度为2 r/min ,输出位置的容许误差小于2,求: 1) 确定满足上述指标的最小K 值,计算该K 值下的相位裕量和幅值裕量; 2) 前向通路中串联超前校正网络0.41 ()0.081 c s G s s +=+,试计算相位裕量。 (合计20分, 共2个小题,每题10分) (rad/s)
第一章绪论 1-1试比较开环控制系统和闭环控制系统的优缺点. 解答:1开环系统 (1)优点:结构简单,成本低,工作稳定。用于系统输入信号及扰动作 用能预先知道时,可得到满意的效果。 (2)缺点:不能自动调节被控量的偏差。因此系统元器件参数变化, 外来未知扰动存在时,控制精度差。 2 闭环系统 ⑴优点:不管由于干扰或由于系统本身结构参数变化所引起的被控量 偏离给定值,都会产生控制作用去清除此偏差,所以控制精度较高。 它是一种按偏差调节的控制系统。在实际中应用广泛。 ⑵缺点:主要缺点是被控量可能出现波动,严重时系统无法工作。 1-2 什么叫反馈?为什么闭环控制系统常采用负反馈?试举例说明之。 解答:将系统输出信号引回输入端并对系统产生控制作用的控制方式叫反馈。 闭环控制系统常采用负反馈。由1-1中的描述的闭环系统的优点所证 明。例如,一个温度控制系统通过热电阻(或热电偶)检测出当前炉 子的温度,再与温度值相比较,去控制加热系统,以达到设定值。 1-3 试判断下列微分方程所描述的系统属于何种类型(线性,非线性,定常,时变)? (1) (2) (3) (4) (5)
(6) (7) 解答:(1)线性定常(2)非线性定常(3)线性时变 (4)线性时变(5)非线性定常(6)非线性定常 (7)线性定常 1-4如图1-4是水位自动控制系统的示意图,图中Q1,Q2分别为进水流量和出水流量。控制的目的是保持水位为一定的高度。 试说明该系统的工作原理并画出其方框图。 题1-4图水位自动控制系统 解答: (1) 方框图如下: ⑵工作原理:系统的控制是保持水箱水位高度不变。水箱是被控对象,水箱的水位是被控量,出水流量Q2的大小对应的水位高度是给定量。当水箱水位高于给定水位,通过浮子连杆机构使阀门关小,进入流量减小,水位降低,当水箱水位低于给定水位时,通过浮子连杆机构使流入管道中的阀门开大,进入流量增加,水位升高到给定水位。 1-5图1-5是液位系统的控制任务是保持液位高度不变。水箱是被控对象,水箱液位是被控量,电位器设定电压时(表征液位的希望值Cr)是给定量。
自动控制原理试题及答案 Prepared on 24 November 2020
《自动控制原理》试题及答案 1、若某串联校正装置的传递函数为(10s+1)/(100s+1),则该校正装置属于(B )。3分 2、在对控制系统稳态精度无明确要求时,为提高系统的稳定性,最方便的是(A)3分 3、在系统中串联PD调节器,以下那一种说法是错误的(D) 3分 A 是一种相位超前校正装置 B 能影响系统开环幅频特性的高频段 C 使系统的稳定性能得到改善 D使系统的稳态精度得到改善 4、用超前校正装置改善系统时,主要是利用超前校正装置的(A )3分 5、I型系统开环对数幅频特性的低频段斜率为(B )9分 6、设微分环节的频率特性为G(jω),当频率ω从0变化至∞时,其极坐标平面上的奈氏曲线是()9分 7、关于线性系统稳定性的判定,下列观点正确的是 ( )。9分 8、若两个系统的根轨迹相同,则有相同的( ) 9分 9、关于系统零极点位置对系统性能的影响,下列观点中正确的是( ) 7分 10、高阶系统的主导闭环极点越靠近虚轴,则系统的( ) 2分 11、若某最小相位系统的相角裕度γ>0,则下列说法正确的是 ( )。2分 12、某环节的传递函数是G(s)=5s+3+2/s,则该环节可看成由(D )环节组成。2分
13、主导极点的特点是(A )2分 14、设积分环节的传递函数为G(s)=K/s,则其频率特性幅值A(ω)=()2分 15、某环节的传递函数为K/(Ts+1),它的对数幅频率特性随K值增加而()2分 16、某系统的传递函数是G(s)=1/(2s+1),则该可看成由(C )环节串联而成2分 17、若系统的开环传递函数在s右半平面上没有零点和极点,则该系统称作(B)2分 18、某校正环节传递函数G(s)=(100s+1)/(10s+1),则其频率特性的奈氏图终点坐标为( D)2分 19、一般为使系统有较好的稳定性,希望相位裕量为( C)2分 20、最小相位系统的开环增益越大,其()2分 21、一阶微分环节G(s)=1+Ts,当频率ω=1/T时,则相频特性∠G(jω)为()2分 22、ω从0变化到+∞时,延迟环节频率特性极坐标图为()2分 23、开环传递函数为G(s)H(s)=(s+3)/(s+2)(s+5),则实轴上的根轨迹为(B)2分 24、开环传递函数为G(s)H(s)=K/(s*s*s(s+4)),则实轴上的根轨迹为()2分 25、某单位反馈系统的开环传递函数为:G(s)=K/(s(s+1)(s+5)),当k=(C )时,闭环系统临界稳定。2分 26、若系统增加合适的开环零点,则下列说法不正确的是 (B ) 2分 27、当二阶系统的根分布在根平面的虚轴上时,系统的阻尼比为(B)3分
. 第一章引论 1-1 试描述自动控制系统基本组成,并比较开环控制系统和闭环控制系统的特点。答: 自动控制系统一般都是反馈控制系统,主要由控制装置、被控部分、测量元件组成。控制装置是由具有一定职能的各种基本元件组成的,按其职能分,主要有给定元件、比较元件、校正元件和放大元件。如下图所示为自动控制系统的基本组成。 开环控制系统是指控制器与被控对象之间只有顺向作用,而没有反向联系的控制过程。此时,系统构成没有传感器对输出信号的检测部分。开环控制的特点是:输出不影响输入,结构简单,通常容易实现;系统的精度与组成的元器件精度密切相关;系统的稳定性不是主要问题;系统的控制精度取决于系统事先的调整精度,对于工作过程中受到的扰动或特性参数的变化无法自动补偿。 闭环控制的特点是:输出影响输入,即通过传感器检测输出信号,然后将此信号与输入信号比较,再将其偏差送入控制器,所以能削弱或抑制干扰;可由低精度元件组成高精度系统。 闭环系统与开环系统比较的关键,是在于其结构有无反馈环节。 < 1-2 请说明自动控制系统的基本性能要求。 答: 自动控制系统的基本要求概括来讲,就是要求系统具有稳定性、快速性和准确性。 稳定性是对系统的基本要求,不稳定的系统不能实现预定任务。稳定性通常由系统的结构决定与外界因素无关。对恒值系统,要求当系统受到扰动后,经过一定时间的调整能够回到原来的期望值(例如恒温控制系统)。对随动系统,被控制量始终跟踪参量的变化(例如炮轰飞机装置)。 快速性是对过渡过程的形式和快慢提出要求,因此快速性一般也称为动态特性。在系统稳定的前提下,希望过渡过程进行得越快越好,但如果要求过渡过程时间很短,可能使动态误差过大,合理的设计应该兼顾这两方面的要求。 准确性用稳态误差来衡量。在给定输入信号作用下,当系统达到稳态后,其实际输出与所期望的输出之差叫做给定稳态误差。显然,这种误差越小,表示系统的精度
《自动控制原理》习题解答西安建筑科技大学自动化教研室
第一章习题及答案 1-3图1-3 (a),(b)所示均为调速系统。 (1) 分别画出图1-24(a)、图(b)所示系统的方框图。给出图1-24(a) 所示系统正确的反馈连线方式。 (2) 指出在恒值输入条件下,图1-24(a),(b) 所示系统中哪个是有差系统,哪个是无差系统,说明其道理。 图1-3 调速系统工作原理图 解图1-3 (a)正确的反馈连接方式如图1-3 (a)中虚线所示。 (1) 系统方框图如图解1-10所示。 (2) 图1-3 (a) 所示的系统是有差系统,图1-3 (b) 所示的系统是无差系统。 图1-3 (a)中,当给定恒值电压信号,系统运行达到稳态时,电动机转速的恒定是以发电机提供恒定电压为条件,对应发电机激磁绕组中电流一定是恒定值。这意味着放大器前端电压是非零的常值。因此,常值偏差电压存在是系统稳定工作的前提,故系统有差。 图1-3 (b)中,给定恒定电压,电动机达到稳定转速时,对应发电机激磁绕组中的励磁电流恒定,这意味着执行电动机处于停转状态,放大器前端电压必然为0,故系统无差。 1-4图1-4 (a),(b)所示的系统均为电压调节系统。假设空载时两系统发电机端电压均为
110V,试问带上负载后,图1-4(a),(b)中哪个能保持110V不变,哪个电压会低于110V?为什么? 图1-4 电压调节系统工作原理图 解带上负载后,开始由于负载的影响,图1-4(a)与(b)系统的端电压都要下降,但图(a)中所示系统能恢复到110V,而图(b) 所示系统却不能。理由如下: 图(a)系统,当u低于给定电压时,其偏差电压经放大器K放大后,驱动电机D转动,经 I增大,发电机的输出电压会升高,从而使偏差电减速器带动电刷,使发电机F的激磁电流 j 压减小,直至偏差电压为零时,电机才停止转动。因此,图(a)系统能保持110V不变。 图(b)系统,当u低于给定电压时,其偏差电压经放大器K后,直接使发电机激磁电流增大,提高发电机的端电压,使发电机G 的端电压回升,偏差电压减小,但不可能等于零,因 i=0,发电机就不能工作。即图(b)所示系统的稳态电压会低于110V。为当偏差电压为0时, f 1-5图1-5是仓库大门自动控制系统原理示意图。试说明系统自动控制大门开、闭的工作原理,并画出系统方框图。 图1-5 仓库大门自动开闭控制系统
课程教学 大纲编号: 100102 课程名称: 自动控制原理 学分 4.5 试卷编号:100102021 考试方式: 闭卷考试 考试时间: 120 分钟 满分分值: 100 组卷年月: 2000/5 组卷教师: 向峥嵘 审定教师; 陈庆伟 一.(10分)是非题: 1. 闭环控制系统是自动控制系统,开环控制系统不是自动控制系统( )。 2.闭环控制系统的稳定性,与构成他的开环传递函数无关( ),与闭环传递函数有关( );以及与输入信号有关( )。 3.控制系统的稳态误差与系统的阶数有关( );与系统的类型有关;( ) 与系统的输入信号有关;( ),以及与系统的放大倍数有关。( ) 4.前向通道传递函数为)k (s k 02>的单位负反馈系统能无差的跟踪斜波信号 ( )。 5.最小相位系统是稳定的控制系统( )。 二.(10分)填空题 图示系统的开环放大倍数为 ,静态位置误差为 ,静态速度误差为 ,误差传递函数) s (R )s (E 为 ,当输入信号4=)t (r 时,系统的稳态误差ss e 。 三.(10分)填空题 在频率校正法中,串联超前校正是利用串联矫正装置在系统的 频区产生相角 ,以提高系统的 ,且使幅值穿越频率c ω ,从而系统的响应速度 。串联滞后校正是利用校正装
在 频区产生的特性,以使c ω ,达到提高 的目的,校正后的系统响应速度 。 四.(10分)计算作图题 化简如图所示的结构图,并求闭环传递函数) s (R )s (C 。 五.(10分) 一个开环传递函数为 ) s (s k )s (G 1+= τ的单位负反馈系统,其单位阶跃响应曲线如图所示,试确定参数k 及τ。 六.(8分) 设单位负反馈系统的开环传递函数为) s .(s )s (G 110100+= ,试计算系统的响应控制信号t sin )t (r 5=时的稳态误差。 七.(10分) 设某系统的开环传递函数为)Ts (s k )s (H )s (G 1+=,现希望系统特征方程的所有根都 在a s -=这条线的左边区域内,试确定满足此要求k 的值和T 值的范围)a (0>。
清华第三版 运筹学 答案[键入文字] [键入文字] [键入文字] 运筹学教程 1. 某饲养场饲养动物出售,设每头动物每天至少需700g 蛋白质、30g 矿物质、100mg 维生素。现有五种饲料可供选用,各种饲料每kg 营养成分含量及单价如表1所示。 表1 要求确定既满足动物生长的营养需要,又使费用最省的选用饲料的方案。 解:设总费用为Z 。i=1,2,3,4,5代表5种饲料。i x 表示满足动物生长的营养需要时,第i 种饲料所需的数量。则有: ????? ? ?=≥≥++++≥++++≥++++++++=5,4,3,2,1,01008.022.05.0305.022.05.07008623..8.03.04.07.02.0min 54321543215432154321i x x x x x x x x x x x x x x x x t s x x x x x Z i 2. 某医院护士值班班次、每班工作时间及各班所需护士数如表2所示。每班护士值班 开始时间向病房报道,试决定: (1) 若护士上班后连续工作8h ,该医院最少需要多少名护士,以满足轮班需要; (2) 若除22:00上班的护士连续工作8h 外(取消第6班),其他班次护士由医院 排定上1~4班的其中两个班,则该医院又需要多少名护士满足轮班需要。 表2
6 2:00~6:00 30 解:(1)设x 第i 班开始上班的人数,i=1,2,3,4,5,6 ???????????=≥≥+≥+≥+≥+≥+≥++++++=且为整数 6,5,4,3,2,1,030 2050607060..min 655443 322161 654321i x x x x x x x x x x x x x t s x x x x x x Z i 解:(2)在题设情况下,可知第五班一定要30个人才能满足轮班需要。则设设i x 第i 班开始上班的人数,i=1,2,3,4。 ??? ????? ?? ??? ??=≥=+++=≥+++=+++=≥+++=+++=≥+++=+++=≥+++++++=4 ,3,2,1,1002 1502 16021702 ,160..30 min i 444342414444433422411434 33323133 443333223113242322212244233222211214131211114413312211114321j i y x y y y y y x y x y x y x y y y y y y x y x y x y x y y y y y y x y x y x y x y y y y y y x y x y x y x y t s x x x x Z ij 变量,—是,,,第四班约束,,第三班约束,,第二班约束,第一班约束 3. 要在长度为l 的一根圆钢上截取不同长度的零件毛坯,毛坯长度有n 种,分别为j a (j=1,2,…n )。问每种毛坯应当截取多少根,才能使圆钢残料最少,试建立本问题的数学模型。 解:设i x 表示各种毛坯的数量,i=1,2,…n 。
自动控制原理 一、简答题:(合计20分,共4个小题,每题5分) 1. 如果一个控制系统的阻尼比比较小,请从时域指标和频域指标两方面 说明该系统会有什么样的表现?并解释原因。 2. 大多数情况下,为保证系统的稳定性,通常要求开环对数幅频特性曲 线在穿越频率处的斜率为多少?为什么? 3. 简要画出二阶系统特征根的位置与响应曲线之间的关系。 4. 用根轨迹分别说明,对于典型的二阶系统增加一个开环零点和增加一 个开环极点对系统根轨迹走向的影响。 二、已知质量-弹簧-阻尼器系统如图(a)所示,其中质量为m 公斤,弹簧系数为k 牛顿/米,阻尼器系数为μ牛顿秒/米,当物体受F = 10牛顿的恒力作用时,其位移y (t )的的变化如图(b)所示。求m 、k 和μ的值。(合计20分) F ) t 图(a) 图(b) 三、已知一控制系统的结构图如下,(合计20分,共2个小题,每题10分) 1) 确定该系统在输入信号()1()r t t =下的时域性能指标:超调量%σ,调 节时间s t 和峰值时间p t ; 2) 当()21(),()4sin 3r t t n t t =?=时,求系统的稳态误差。
四、已知最小相位系统的开环对数幅频特性渐近线如图所示,c ω位于两个交接频率的几何中心。 1) 计算系统对阶跃信号、斜坡信号和加速度信号的稳态精度。 2) 计算超调量%σ和调节时间s t 。(合计20分,共2个小题,每题10分) [ 1 %0.160.4( 1)sin σγ =+-, s t = 五、某火炮指挥系统结构如下图所示,()(0.21)(0.51) K G s s s s = ++系统最 大输出速度为2 r/min ,输出位置的容许误差小于2 ,求: 1) 确定满足上述指标的最小K 值,计算该K 值下的相位裕量和幅值裕 量; 2) 前向通路中串联超前校正网络0.41 ()0.081 c s G s s +=+,试计算相位裕量。 (合计20分,共2个小题,每题10分) (rad/s)
运筹学(第3版)习题答案 第1章线性规划 P36 第2章线性规划的对偶理论 P74 第3章整数规划 P88 第4章目标规划 P105 第5章运输与指派问题P142 第6章网络模型 P173 第7章网络计划 P195 第8章动态规划 P218 第9章排队论 P248 第10章存储论P277 第11章决策论P304 第12章 多属性决策品P343 第13章博弈论P371 全书420页 第1章 线性规划 1.1工厂每月生产A 、B 、C 三种产品 ,单件产品的原材料消耗量、设备台时的消耗量、资源限量及单件产品利润如表1-23所示. 310和130.试建立该问题的数学模型,使每月利润最大. 【解】设x 1、x 2、x 3分别为产品A 、B 、C 的产量,则数学模型为 1231231 23123123max 1014121.5 1.2425003 1.6 1.21400 150250260310120130,,0 Z x x x x x x x x x x x x x x x =++++≤??++≤??≤≤?? ≤≤??≤≤?≥?? 1.2建筑公司需要用5m 长的塑钢材料制作A 、B 两种型号的窗架.两种窗架所需材料规格 及数量如表1-24所示:
问怎样下料使得(1)用料最少;(2)余料最少. 【解 设x j (j =1,2,…,10)为第j 种方案使用原材料的根数,则 (1)用料最少数学模型为 10 1 12342567368947910 min 2800212002600223900 0,1,2,,10 j j j Z x x x x x x x x x x x x x x x x x x j ==?+++≥? +++≥?? +++≥??+++≥??≥=?∑L (2)余料最少数学模型为 2345681012342567368947910 min 0.50.50.52800 212002********* 0,1,2,,10 j Z x x x x x x x x x x x x x x x x x x x x x x x x j =++++++?+++≥? +++≥?? +++≥??+++≥??≥=?L 1.3某企业需要制定1~6月份产品A 的生产与销售计划。已知产品A 每月底交货,市场需求没有限制,由于仓库容量有限,仓库最多库存产品A1000件,1月初仓库库存200件。1~6月份产品A 的单件成本与售价如表1-25所示。 (2)当1月初库存量为零并且要求6月底需要库存200件时,模型如何变化。 【解】设x j 、y j (j =1,2,…,6)分别为1~6月份的生产量和销售量,则数学模型为