
[3]Cho i S B.T he Design o f a L ook-D own Feedback
A daptiv e Co nt roller for the L ateral Contr ol o f Fr ont
-Wheel-St eer ing Autono mo us Highw ay V eh-i
cles.IEEE T ransactions o n V ehicular T echnolog y,
2000,49(6):2257~2269
[4]吴超仲,王春燕,杨利民,等.智能公路系统车道保
持模糊控制研究.公路交通科技,2002,19(2):
131~133
[5]H atipog lu C,&U mit&O zg&uner,Redmill K A.A uto-
mated L ane Change Contro ller D esign.IEEE T r ans-
act ions on Intellig ent T ransportat ion Sy st ems,
2003,4(1):13~22
[6]沈中杰,王武宏,钟永刚.智能交通系统中基于机
器视觉的数字车辆控制.汽车工程,2003,25(5):
428~433
[7]陶永华.新型PID控制及其应用.北京:机械工业
出版社,2002
[8]管欣,高振海,郭孔辉.驾驶员稳态预瞄动态校正
假说.汽车工程,2003,25(3):227~231
[9]郭孔辉.汽车操纵动力学.长春:吉林科学技术出
版社,1991(编辑郭伟)
作者简介:高振海,男,1973年生。吉林大学汽车动态模拟国家重点实验室副教授。研究方向为汽车动态仿真与控制、驾驶员操纵行为建模及汽车智能辅助驾驶系统等。发表论文28篇。姜立勇,男,1976年生。吉林大学汽车动态模拟国家重点实验室讲师。
铰接式自卸车橡胶弹簧悬架系统的
动力学建模与分析
许志华1孙蓓蓓1孙庆鸿1马铸2
1.东南大学,南京,210096
2.徐州工程机械集团有限公司,徐州,221006
摘要:基于XAD250铰接式自卸车悬架结构拓扑关系,建立了橡胶弹簧悬架系统及整车的非线性数字化模型;在ADAMS软件中生成了等级路面后,以不同载荷和车速对样机进行了动力学仿真分析。分析结果表明:前悬架橡胶弹簧刚度的非线性特性能满足驾驶室在不同载荷下具有等支承频率,从而保证稳定的行驶平顺性要求;后悬架系统在轻载荷下较之重载荷具有较高的支承频率,这会影响到车辆的整体行驶平顺性。对后悬架橡胶弹簧刚度进行了优化,优化后橡胶弹簧的非线性刚度曲线能够使车辆保持稳定且有良好的平顺性。
关键词:铰接式自卸车;悬架;非线性;多体动力学;ADAM S
中图分类号:U461.1文章编号:1004)132Ⅹ(2005)03)0277)05
D ynamic Modeling and Analysis of Rubber Suspension System of Articulated Dum p T ru ck
Xu Zhihua1Sun Beibei1Sun Qinghong1Ma Zhu2
1.Southeast University,Nanjing,210096
2.Xuzhou Construction Machinery Group Co.Ltd.,Xuzhou,221006
A bstract:Nonlinear virtual prototyping of XAD250has been built based on topological analyses of sus-pension of XAD250articulated dump truck,and the method of simulating grade road in ADAMS has been de-scribed.Multi-body dynamics analyses of the ride comfort have been performed with different velocities and different loads.Results indicate that the good and constant ride comfort of cab can be satisfied under different loads because of the nonlinear properties of rubber spring s of front suspension.Rear suspension system under light load has higher supporting frequency than that under deadweight,which may result in instable ride com-fort.Based on analysis results,optimization of rear suspension parameter has been carried out.Optimal re-sults indicate that using rubber spring with optimum nonlinear elasticity characteristics results in good and constant ride comfort of AD250.The results provide a basis for the parameter optimization of suspension of ar-ticulated dump trucks.
Key w ords:articulated dump truck;suspension;nonlinear;multi-body dynamics;ADAMS
0引言
铰接式自卸车在驾驶室和车体之间具有铰
收稿日期:2003)12)02
基金项目:国家863高技术研究发展计划资助项目(2001A A422013);江苏省自然科学基金预研项目(BK200302)接点及摆动环结构,前后车架可作横向360b的相对转动。铰接式自卸车于20世纪60年代末期才开始研制生产,随后发展迅速,在工程建设中得到广泛应用[1]。目前,瑞典的沃尔沃(Vo lvo)、美国的特雷克斯(T er ex)和卡特彼勒(Caterpillar)等
#
277
#
公司掌握着铰接式自卸车的先进设计和生产技术,是国际上三大生产厂家。国内徐工集团和北方重汽也正在开发研制铰接式自卸车。本文的研究对象为徐工集团自主开发的载重量为25t的XAD250铰接式自卸车。
铰接式自卸车一般采用三点式悬架结构[2], XAD250的悬架系统也不例外,其前悬架的弹性减振件为橡胶弹簧和液压减振器,后悬架的弹性减振件为橡胶弹簧。相对油气弹簧和空气弹簧而言,橡胶弹簧的使用不仅提高了悬架系统的可靠性,还巧妙地利用了橡胶元件在压缩时表现出的硬弹簧非线性特性,使得在不同的工况下(不论是空载,还是满载),整车都能具有良好的平顺性。悬架系统是保证工程车辆在道路恶劣的情况下安全、平顺、可靠行驶的关键。因此对悬架系统进行深入的分析研究,对提高整车的设计水平具有重要的意义。本文在机械系统动力学分析软件ADAM S平台上对XAD250式铰接式自卸车的悬架系统进行分析研究。
1铰接式自卸车的数字样机模型
1.1悬架系统结构的拓扑分析
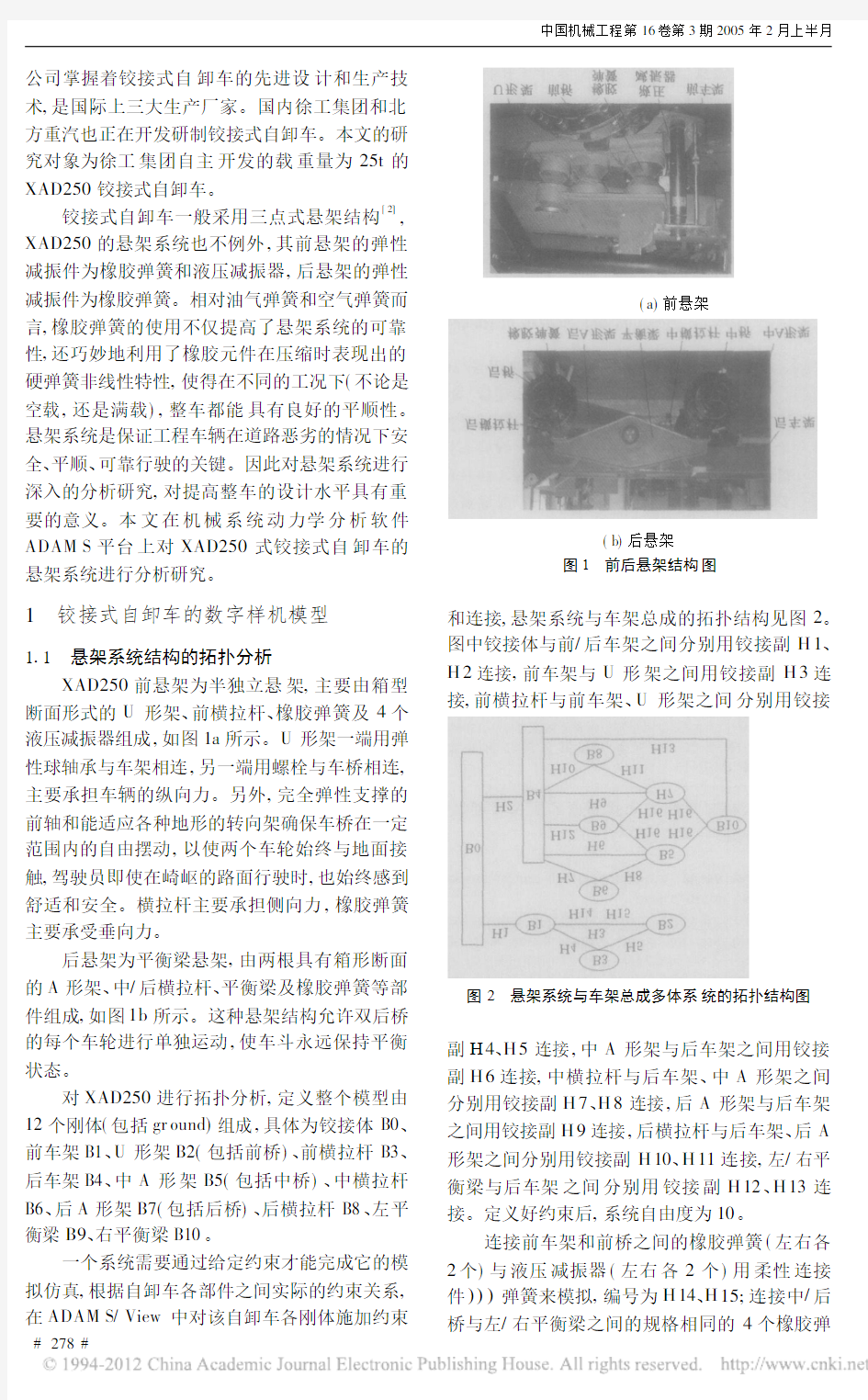
XAD250前悬架为半独立悬架,主要由箱型断面形式的U形架、前横拉杆、橡胶弹簧及4个液压减振器组成,如图1a所示。U形架一端用弹性球轴承与车架相连,另一端用螺栓与车桥相连,主要承担车辆的纵向力。另外,完全弹性支撑的前轴和能适应各种地形的转向架确保车桥在一定范围内的自由摆动,以使两个车轮始终与地面接触,驾驶员即使在崎岖的路面行驶时,也始终感到舒适和安全。横拉杆主要承担侧向力,橡胶弹簧主要承受垂向力。
后悬架为平衡梁悬架,由两根具有箱形断面的A形架、中/后横拉杆、平衡梁及橡胶弹簧等部件组成,如图1b所示。这种悬架结构允许双后桥的每个车轮进行单独运动,使车斗永远保持平衡状态。
对XAD250进行拓扑分析,定义整个模型由12个刚体(包括gr ound)组成,具体为铰接体B0、前车架B1、U形架B2(包括前桥)、前横拉杆B3、后车架B4、中A形架B5(包括中桥)、中横拉杆B6、后A形架B7(包括后桥)、后横拉杆B8、左平衡梁B9、右平衡梁B10。
一个系统需要通过给定约束才能完成它的模拟仿真,根据自卸车各部件之间实际的约束关系,在ADAM S/View
中对该自卸车各刚体施加约束
(a)
前悬架
(b)后悬架
图1前后悬架结构图
和连接,悬架系统与车架总成的拓扑结构见图2。图中铰接体与前/后车架之间分别用铰接副H1、H2连接,前车架与U形架之间用铰接副H3连接,前横拉杆与前车架、U形架之间
分别用铰接
图2悬架系统与车架总成多体系统的拓扑结构图
副H4、H5连接,中A形架与后车架之间用铰接副H6连接,中横拉杆与后车架、中A形架之间分别用铰接副H7、H8连接,后A形架与后车架之间用铰接副H9连接,后横拉杆与后车架、后A 形架之间分别用铰接副H10、H11连接,左/右平衡梁与后车架之间分别用铰接副H12、H13连接。定义好约束后,系统自由度为10。
连接前车架和前桥之间的橡胶弹簧(左右各2个)与液压减振器(左右各2个)用柔性连接件)))弹簧来模拟,编号为H14、H15;连接中/后桥与左/右平衡梁之间的规格相同的4个橡胶弹
# 278 #
簧用弹簧H 16来模拟。
图3为XAD250铰接式自卸车的动力学分析模型图(隐藏掉前后车身),为使分析目标集中,此处略去了发动机支承系统对车辆平顺性的影响,
留待整车驾驶舒适性设计时再考虑。
图3 X AD250铰接式自卸车的动力学
分析模型(隐藏车身)
1.2 前后悬架橡胶弹簧刚度和阻尼的确定使用美国M TS 公司制造的SINT ECH 20/D
材料实验机对前后悬架橡胶弹簧的刚度特性进行测试,其结果见图4。从图中可知,前后橡胶弹簧均为非线性元件。把前后橡胶弹簧的刚度特性曲线采用SPLIN E 的方式输入到ADAM S 中,完成橡胶弹簧刚度的非线性设置。利用SCH ENCK M25动态实验机测得前后橡胶弹簧的阻尼比分别为01052和0111
。
(a)前悬架橡胶弹簧 (b)后悬架橡胶弹簧
图4 前后悬架橡胶弹簧刚度特性曲线
2 等级路面的ADA M S 模拟
根据国家标准GB7031规定,路面的不平程度按照路面功率谱密度分成A~H 8级。为了模拟实际路面对车辆的激励,需要建立具有一定功
率谱密度的随机路面。
在ADAM S 中构造某一等级路面,需先假定一车速,根据时间频率路面功率谱密度G q (f ),计算出该路面不平度的时域信号q(t)。
时间频率功率谱密度G q (f )的表达式
[3]
为
G q (f )=G q (n 0)n 20
u f 2
(1)
式中,G q (n 0)为路面不平度系数,m 2/m -1;n 0为空间参考
频率,n 0=011m -1;f 为时间频率,Hz ;u 为车速,m/s 。
由式(1)可知,在选定某一等级路面和车速后,可得到一个关于时间频率的函数G q (f ),将G q (f )离散化,在ADAM S 中生成一条样条曲线(Spline );根据此样条曲线,再利用反求功率谱密度函数IN VP SD ,就可计算出路面不平度的时间信号q(t)。
其中,IN VP SD 的计算方法如下:
I N VP SD =
E n f
i=1[A
i
sin (2P f i x +U i )](2)
生成的信号由一系列的正弦函数组成,根据
功率谱密度的有效值和时间信号的有效值相等来
决定幅值A i 的大小,相角U i 由pseudo 随机函数发生器产生,取值范围为0~2P 。
将q(t)和车速相乘就是路面空间不平度的信号q(I ),I 为沿道路走向的长度。仿真时间越长,输出数据越多,最后转化出来的路面就越长。
依据文献[3],本文分析的路面选用C 级,仿真生成的路面见图5
。
图5 C 级路面
3 仿真分析
文献[4]给出了平顺性评价的近似方法:用
垂直方向的总加权加速度均方根值来评价车辆的平顺性。这一方法适用于正常行驶工况下的各种
汽车,包括越野汽车[5]。故本文采用此方法进行评价。
先在ADAM S 的仿真模型中测量前车架的垂向加速度时间历程和后车架质心的垂向加速度时间历程,并由Matlab 进行加权滤波。首先对测取的加速度时间历程进行快速傅里叶变换(FFT ),将时域信号变为频域信号,再用频率加权函数对频域信号进行加权,然后再进行快速傅里叶逆变换,得到加权后的时间历程,计算其均方根值。其中频率加权函数为[3]
X (f )=
0.5
f /4112.5/f
0.5 (3) # 279# 3.1 不同车速下平顺性的分析 分别以车速为20km/h 、30km/h 、40km /h (XAD250的最高设计时速为52km/h)进行仿真,其结果见表1。由表1可知: (1)随着车速的提高,前车架的加权加速度均方根值也随之增大。车速为20km/h 时,驾驶室前车架的加权加速度均方根值小于01315m /s 2,依据文献[4],可判定人体感觉为/没有不舒适0;车速为30km/h 时,前车架的加权加速度均方根值处于01315~01630m/s 2 之间,人体感觉为/稍不舒适0;车速为40km/h 时,前车架的加权加速度均方根值处于01630~11250m /s 2 之间,人体感觉/不舒适0。分析结果和实际车辆行驶时驾驶员反映的结果一致。 (2)在空载和满载两种工况下,前车架的垂向加权加速度均方根值很接近。这说明前悬架橡胶弹簧刚度的非线性特性能满足驾驶室在不同载荷下具有等支承频率的良好状况,这样能使车辆行驶时保持稳定和良好的平顺性。如果适当减小前悬架橡胶弹簧的刚度和增大阻尼,则能提高该车高速时的行驶舒适性。 表1 前后车架垂向加权加速度均方根仿真结果 单位:m/s 2 载荷20k m/h 30km /h 40km/h 前车架后车架前车架后车架前车架后车架 空载0.23000.32870.43370.71310.7243 1.1098满载 0.2217 0.2027 0.44480.3508 0.6879 0.4540 图6为在满载、30km /h 工况下前轮与前车架垂向加速度比较曲线。可知,前车架的平均加 速度比前轮的平均加速度小得多,计算得到前轮(前桥)的加权加速度均方根值为017173m /s 2。这说明该车的前悬架系统对振动的衰减较明显。 1.前车架加速度 2.前轮加速度 图6 前车轮/前车架垂向加速度响应曲线 对图6中的加速度响应曲线作功率谱分析,得到的功率谱密度曲线见图7。由图7可知,在满载的工况下,前悬架系统的固有频率为119H z,满足载货汽车前悬架固有频率1151~2104H z 的设计要求 [6] 。前车架加速度功率谱密度值明显小 于前轮值,也说明前悬架橡胶弹簧能够很好地吸收来自路面不平度的冲击。 1.前轮 2.前车架 图7 垂向加速度功率谱密度曲线 (3)表1中,后车架在空载时的垂向加权加速度均方根明显大于满载时的值,这说明后悬架橡胶弹簧的刚度特性曲线不能满足空载和满载两种工况下的要求,从而影响车辆具有稳定的平顺性要求,造成这一情况的具体原因是橡胶弹簧的初始刚度值偏大。优化时以等支承频率为目标,考虑在限位行程允许的范围内调整橡胶弹簧的刚度。 3.2 后悬架橡胶弹簧的刚度非线性特性的优化 载货汽车的后悬架固有频率一般为1167~ 2123H z [6] ,由于铰接式自卸车行驶的路面通常都很恶劣,且考虑到限位行程的约束,故设定2H z 为优化目标。 本文分析的橡胶弹簧属于增硬弹簧。对于非线性硬特性弹簧,其静态载荷)变形特性曲线可描述为 F D = 2kd P tan (P D 2d )(4) 式中,k 为曲线的初始斜率,kN/mm ;d 为变形的极限值,mm ;D 为变形量,mm 。 在假定橡胶弹簧与其承受的载荷构成单自由度系统的基础上,依据式(4)进行优化,得到一非 线性特性曲线,见图8。 图8 优化后的非线性特性曲线 其数学描述如下: F D =2@0.26@216.9P tan ( P D 2@216.9 )(5) # 280# 此曲线可实现悬架在限位行程允许的范围内,支承频率在空载至满载的不同工况下保持在2H z附近,从而提高了车辆的平顺性。 3.3铰接体对平顺性的影响 将连接前后车架的铰接副H1、H2改为固定副,考察铰接体对车辆平顺性的影响。在空载情况下,以车速20km/h、30km/h、40km/h进行仿真,其结果见表2。 表2改变前后车架连接形式的垂向 加权加速度均方根仿真结果单位:m/s2连接方式 20k m/h30km/h40km/h 前车架后车架前车架后车架前车架后车架前后车架铰接0.23000.32870.43370.71310.7376 1.1098前后车架固联0.25720.36390.48630.77030.74850.9689铰接副改为固定副后,前后车架加速度值基本相同,这表明前后车架的连接方式对车辆的垂向振动基本没有影响。 4结论 (1)以XAD250铰接式自卸车为研究对象,对其悬架系统结构的拓扑关系进行了分析,得到其拓扑结构图。在通过实验测得前后悬架橡胶弹簧的刚度阻尼非线性特性后,建立了XAD250的非线性数字化样机。 (2)分别以20km/h、30km/h、40km/h的车速对数字样机进行非线性仿真分析,分析结果和实地驾驶时驾驶员反映的感觉相吻合。分析结果表明前悬架橡胶弹簧刚度的非线性特性能满足驾驶室在不同载荷下具有等支承频率,从而能保持稳定和良好的行驶平顺性。对前轮/前车架加速度响应进行的功率谱分析也同样表明前悬架系统设计较合理,具有明显的减振作用。 (3)通过对后悬架空载和满载时加速度响应的比较,表明原橡胶弹簧的刚度特性曲线不能满足后悬架在空载至满载的不同工况下具有相近的支承频率,这对车辆保持稳定的平顺性不利,需要优化。为此文中在限位行程允许的范围内对橡胶弹簧进行了优化,得到的橡胶弹簧刚度曲线可实现悬架支承频率保持在2H z附近,从而实现了车辆保持稳定平顺性的要求。 参考文献: [1]Wu D H.A T heor et ical Study o f the Y aw/ro ll M o- tio ns of a M ultiple St eer ing A rticulated V ehicle. P roc.Instn.M ech.Eng r s.,P art D,2001,215(12): 1257~1265[2]葛恒安.国内外铰接式自卸车的发展概况.建筑机 械,2003(4):7~9 [3]中国国家标准化委员会.GB/T4970-1996汽车 平顺性随机输入行驶实验方法.北京:中国标准出 版社,1996 [4]ISO2631-1M echanical Vibr atio n Andshock-ev a-l uat ion of H uman Ex posure to W hole-body V ibra- tio n.1997 [5]余志生.汽车理论.第3版.北京:机械工业出版 社,2002 [6]刘惟信.汽车设计.北京:清华大学出版社,2001 (编辑郭伟) 作者简介:许志华,男,1975年生。东南大学机械工程系博士研究生。研究方向为机械动力学分析与结构动态优化。发表论文6篇。孙蓓蓓,女,1968年生。东南大学机械工程系副教授。孙庆鸿,男,1938年生。东南大学机械工程系教授、博士研究生导师。马铸,男,1965年生。徐州工程机械集团有限公司科技部高级工程师。 (上接第259页) [6]李益民,黄伯云,曲选辉.当代金属注射成形技术. 粉末冶金工业,2000,10(1):14~19 [7]梁叔全,黄伯云,曲选辉.金属注射成形中高技术新 概念对其产业化进程的影响.材料导报,1996,10 (1):15~20 [8]V eltl G,Oppert A,P et zo ldt F.W arm F low Com- paction Fo ster s M o re Complex PM Pa rts.M etal Po wder R epo rt,2001,56(2):26~28 [9]Capus J,P icker ing S,Weaver A.H oeg anaes O ffers H ig her Density at L ow ercost.M eta l Po wder Re- po rt,1994,49(7/8):22~24 [10]Capus J.Wa rm Com pacted T urbine H ub Leads N ew PM T hr ust.M etal P ow der Repor t,1997,61 (9):19 [11]Bo cchini G F.W arm Compaction of M etal Po w- der s:Why It W orks,Why It Requires a Sophist-i cated Engineering A ppro ach.Pow der M etallurg y, 1999,42(2):171~180 [12]肖志瑜,柯美元,李元元.温压工艺的最新进展- 流动温压技术.粉末冶金工业,2002,12(5):16~ 21 (编辑苏卫国) 作者简介:肖志瑜,男,1965年生。华南理工大学机械工程学院副教授、博士。主要研究方向为高性能粉末冶金材料制备及其精密成形技术。获国家及省部级奖励4项,获国家发明专利3项。发表论文35篇。张菊红,女,1977年生。华南理工大学机械工程学院硕士研究生。邵明,男,1951年生。华南理工大学机械工程学院教授、博士研究生导师。李元元,男,1958年生。华南理工大学校长、教授、博士研究生导师。 # 281 # 弹簧中的动力学问题 弹簧中的动力学问题 知识分析 两个物体之间用轻质弹簧连在一起,连接的弹簧或为原长,或已压缩而被锁定。这样包括弹簧的系统与第三个物体相互作用(碰撞、子弹射入等)。这是这类问题的典型物理情境。首先应注意上述两种情况的区别:已完全压缩的弹簧没有缓冲作用,应将系统当作一个整体来处理;没压缩的弹簧有缓冲作用,只有碰撞的两个物体组成系统,与弹簧相连的另一端的物体没有参与。 此类问题还应注意:把相互作用的总过程划分为多个依次进行的子过程,分析确定哪些子过程机械能是守恒的,哪些子过程机械能不守恒。还有一个常见的物理条件:当弹簧最长或最短(或弹簧中弹性势能最大)时,弹簧两端的物体速度相等。 典型例题 【例1】一物体从某一高度自由落下,落在直立于地面的轻弹簧上,如右 图所示。在A点,物体开始与弹簧接触到B点时,物体速度为 零,然后被弹回。下列说法中正确的是() A.物体从A下降到B的过程中,动能不断变小 B.物体从B上升到A的过程中,动能不断变大 C.物体从A下降到B,以及从B上升到A的过程中,速率都是 先增大,后减小 D.物体在B点时,所受合力为零 【例2】如图所示,坡道顶端距水平面高度为h,质量为m1的小物块A从坡道顶端由静止滑下,进入水平面上的滑道时无机械能损失,为使A制动,将轻弹簧的一端固定在水平滑道延长线M 处的墙上,另一端与质量为m2档板B相连,弹簧处于原长时,B恰位于滑道的末端O点。 A与B碰撞时间极短,碰后结合在一起共同压缩弹簧,已知在OM段A、B与水平面间的动摩擦因数均为μ,其余各处的摩擦不计,重力加速度为g,求: (1)物块A在与挡板B碰撞前瞬间速度v的大小; (2)弹簧最大压缩量为d时的弹性势能Ep(设弹簧处于原长时弹性势能为零)。 金属基实心弹簧的制备 计划以钇稳定的四方多晶氧化锆为原料,采用凝胶注模成型方法,制备圆柱形螺旋陶瓷弹簧。 实验设计的主要方向包括以下几个方面: (1)预混液的制备 有机单体、交联剂和蒸馏水比例为 20:2:100。丙烯酰胺 20g,N,N’-亚甲基双丙烯酰胺 2g,一同倒入烧杯中并加入 100ml 水,在磁力搅拌器上搅拌至完全溶解。将配好的预混液覆盖保鲜膜静置待用。 2)氧化锆浆料的制备 使用亚微米级钇稳定的四方多晶氧化锆粉末(氧化钇掺杂的摩尔分数为 3%)与预混液混合球磨来制备氧化锆浆料,为使浆料分散均匀,且保持稳定,外加原料质量百分比为 0.2-1%的分散剂,分散剂可为聚丙烯酸,聚丙烯酸铵或聚丙烯酸与聚丙烯酸铵的混合液。再加入预混液,搅拌均匀。 (3)样品的成型 将配置好的浆料进行真空抽滤,外加引发剂,用玻璃棒搅拌混合均匀。为便于脱模,需在模具内侧均匀涂抹一层凡士林。将混合浆料倒入弹簧模具中,恒温干燥箱中固化成型,根据不同参数弹簧凝胶速度的不同,在烘箱中保温,待浆料固化成型后脱模,置于室内,于室温下自然干燥天,制得螺旋形陶瓷弹簧坯体。 (4)样品的烧结 将干燥后的螺旋形陶瓷弹簧坯体置于烧结容器中,烧结容器中的螺旋形陶瓷弹簧坯体内部及周围充满高温莫来石陶瓷纤维,再将烧结容器放入烧结炉中加热,并保温进行无压烧结,制得螺旋形陶瓷弹簧。 实验流程图如下: 参考文献:赵岚.高温弹性元件氧化锆陶瓷弹簧的制备及性能研究.[D].天津:天津大学材料,2014 聚合物基弹簧的制备 思路来源:刘炳涛.橡胶弹簧的设计计算 [J].煤矿设计1983.(7) 参考文献:陈耀庭.橡胶加工工艺[M].北京:化学工业出版社. 1982.11 橡胶弹簧是将实心或空心的橡胶块的表面与金属硫化在一起,利用橡胶的弹性变形实现弹簧的作用。 原理:利用橡胶的弹性后效,不同牌号橡胶的弹性后效不同。利用橡胶的弹性和金属的刚性制备弹簧。 制备方案:生胶采用丁腈橡胶(韧性大),塑炼机用开炼机,混炼机用开放式混炼机。在制备空心和实心的弹簧时挤出机设备不同,其他原理均相同。 橡胶弹簧的原材料:生胶、各种配合剂、以及作为骨架材料的金属材料 1.原材料的选取 1.1生胶的选取: 丁腈橡胶具有优良的耐油性,和弹性。丁腈橡胶主要用于制作耐油制品,如耐油管、胶带、橡胶隔膜和大型油囊等,常用于制作各类耐油模压制品,如O形圈、油封、皮碗、膜片、活门、波纹管等,也用于制作胶板和耐磨零件。丁腈胶因耐油、耐热性能和物理机械性能优异,已经成为耐油橡胶制品的标准弹性体。丁睛胶是非结晶性橡胶,所以生胶强度不高。加工时必须加入补强剂。 1.2金属材料的选取:选用易切结构钢;弹簧钢65Mn、55Si2Mn、60Si2Mn(A)、 30W4Cr2VA等 橡胶制品的基本生产工·艺过程包括塑炼、混炼、压延、压出、成型、硫化6个基本 工序 模型组合讲解——弹簧模型(动力学问题) [模型概述] 弹簧模型是高考中出现最多的模型之一,在填空、实验、计算包括压轴题中都经常出现,考查范围很广,变化较多,是考查学生推理、分析综合能力的热点模型。 [模型讲解] 一. 正确理解弹簧的弹力 例1. 如图1所示,四个完全相同的弹簧都处于水平位置,它们的右端受到大小皆为F的拉力作用,而左端的情况各不相同:①中弹簧的左端固定在墙上。②中弹簧的左端受大小也为F的拉力作用。③中弹簧的左端拴一小物块,物块在光滑的桌面上滑动。④中弹簧的左端拴一小物块,物块在有摩擦的桌面上滑动。若认为弹簧的质量都为零,以l1、l2、l3、l4依次表示四个弹簧的伸长量,则有() ①② ③④ 图1 解析:当弹簧处于静止(或匀速运动)时,弹簧两端受力大小相等,产生的弹力也相等,用其中任意一端产生的弹力代入胡克定律即可求形变。当弹簧处于加速运动状态时,以弹簧为研究对象,由于其质量为零,无论加速度a为多少,仍然可以得到弹簧两端受力大小相等。 F是作用力与反作用的关系,因此,弹簧 的弹力也处处相等,与静止情况没有区别。在题目所述四种情况中,由于弹簧的右端受到大小皆为F的拉力作用,且弹簧质量都为零,根据作用力与反作用力关系,弹簧产生的弹力大小皆为F,又由四个弹簧完全相同,根据胡克定律,它们的伸长量皆相等,所以正确选项为D。 二. 双弹簧系统 例2. (2004年苏州调研)用如图2所示的装置可以测量汽车在水平路面上做匀加速直线运动的加速度。该装置是在矩形箱子的前、后壁上各安装一个由力敏电阻组成的压力传感器。用两根相同的轻弹簧夹着一个质量为2.0kg的滑块,滑块可无摩擦的滑动,两弹簧的另一端分别压在传感器a、b上,其压力大小可直接从传感器的液晶显示屏上读出。现将装置沿运动方向固定在汽车上,传感器b在前,传感器a在后,汽车静止时,传感器a、b的示数均为10N 图2 (1)若传感器a的示数为14N、b的示数为6.0N,求此时汽车的加速度大小和方向。 (2)当汽车以怎样的加速度运动时,传感器a的示数为零。 解析:(1 a1的方向向右或向前。 (2 高中物理经典问题---弹簧类问题全面总结解读 一:专题训练题 1、一根劲度系数为k,质量不计的轻弹簧,上端固定,下端系一质量为m 的物体,有一水平板 将物体托住,并使弹簧处于自然长度。如图7所示。现让木板由静止开始以加速度a(a <g = 匀加速向下移动。求经过多长时间木板开始与物体分离。 分析与解:设物体与平板一起向下运动的距离为x 时,物体受重力mg ,弹簧的弹力F=kx 和平板的支持力N 作用。据牛顿第二定律有: mg-kx-N=ma 得N=mg-kx-ma 当N=0时,物体与平板分离,所以此时k a g m x )(-= 因为221at x =,所以ka a g m t )(2-=。 2、如图8所示,一个弹簧台秤的秤盘质量和弹簧质量都不计,盘内放一个物体P 处于静 止,P 的质量m=12kg ,弹簧的劲度系数k=300N/m 。现在给P 施加一个竖直向上的力F , 使P 从静止开始向上做匀加速直线运动,已知在t=0.2s 内F 是变力,在0.2s 以后F 是恒 力,g=10m/s 2,则F 的最小值是 ,F 的最大值是 。 .分析与解:因为在t=0.2s 内F 是变力,在t=0.2s 以后F 是恒力,所以在t=0.2s 时,P 离 开秤盘。此时P 受到盘的支持力为零,由于盘和弹簧的质量都不计,所以此时弹簧处于 原长。在0_____0.2s 这段时间内P 向上运动的距离: x=mg/k=0.4m 因为221at x =,所以P 在这段时间的加速度22/202s m t x a == 当P 开始运动时拉力最小,此时对物体P 有N-mg+F min =ma,又因此时N=mg ,所以有 F min =ma=240N. 当P 与盘分离时拉力F 最大,F max =m(a+g)=360N. 3.如图9所示,一劲度系数为k =800N/m 的轻弹簧两端各焊接着两个质量均为m =12kg 的 物体A 、B 。物体A 、B 和轻弹簧竖立静止在水平地面上,现要加一竖直向上的力F 在上面 物体A 上,使物体A 开始向上做匀加速运动,经0.4s 物体B 刚要离开地面,设整个 过程中弹簧都处于弹性限度内,取g =10m/s 2 ,求: (1)此过程中所加外力F 的最大值和最小值。 (2)此过程中外力F 所做的功。 解:(1)A 原来静止时:kx 1=mg ① 当物体A 开始做匀加速运动时,拉力F 最小,设为F 1,对物体A 有: F 1+kx 1-mg =ma ② 当物体B 刚要离开地面时,拉力F 最大,设为F 2,对物体A 有: F 2-kx 2-mg =ma ③ 对物体B 有:kx 2=mg ④ 对物体A 有:x 1+x 2=22 1at ⑤ 由①、④两式解得 a =3.75m/s 2 ,分别由②、③得F 1=45N ,F 2=285N F 图8 A B F 图 9 图7 系统动力学模型介绍 1.系统动力学的思想、方法 系统动力学对实际系统的构模和模拟是从系统的结构和功能两方面同时进行的。系统的结构是指系统所包含的各单元以及各单元之间的相互作用与相互关系。而系统的功能是指系统中各单元本身及各单元之间相互作用的秩序、结构和功能,分别表征了系统的组织和系统的行为,它们是相对独立的,又可以在—定条件下互相转化。所以在系统模拟时既要考虑到系统结构方面的要素又要考虑到系统功能方面的因素,才能比较准确地反映出实际系统的基本规律。系统动力学方法从构造系统最基本的微观结构入手构造系统模型。其中不仅要从功能方面考察模型的行为特性与实际系统中测量到的系统变量的各数据、图表的吻合程度,而且还要从结构方面考察模型中各单元相互联系和相互作用关系与实际系统结构的一致程度。模拟过程中所需的系统功能方面的信息,可以通过收集,分析系统的历史数据资料来获得,是属定量方面的信息,而所需的系统结构方面的信息则依赖于模型构造者对实际系统运动机制的认识和理解程度,其中也包含着大量的实际工作经验,是属定性方面的信息。因此,系统动力学对系统的结构和功能同时模拟的方法,实质上就是充分利用了实际系统定性和定量两方面的信息,并将它们有机地融合在一起,合理有效地构造出能较好地反映实际系统的模型。 2.建模原理与步骤 (1)建模原理 用系统动力学方法进行建模最根本的指导思想就是系统动力学的系统观和方法论。系统动力学认为系统具有整体性、相关性、等级性和相似性。系统内部的反馈结构和机制决定了系统的行为特性,任何复杂的大系统都可以由多个系统最基本的信息反馈回路按某种方式联结而成。系统动力学模型的系统目标就是针对实际应用情况,从变化和发展的角度去解决系统问题。系统动力学构模和模拟的一个最主要的特点,就是实现结构和功能的双模拟,因此系统分解与系统综合原则的正确贯彻必须贯穿于系统构模、模拟与测试的整个过程中。与其它模型一样,系统动力学模型也只是实际系统某些本质特征的简化和代表,而不是原原本本地翻译或复制。因此,在构造系统动力学模型的过程中,必须注意把握大局,抓主要矛盾,合理地定义系统变量和确定系统边界。系统动力学模型的一致性和有效性的检验,有一整套定性、定量的方法,如结构和参数的灵敏度分析,极端条件下的模拟试验和统计方法检验等等,但评价一个模型优劣程度的最终标准是客观实践,而实践的检验是长期的,不是一二次就可以完成的。因此,一个即使是精心构造出来的模型也必须在以后的应用中不断修改、不断完善,以适应实际系统新的变化和新的目标。 (2)建模步骤 系统动力学构模过程是一个认识问题和解决问题的过程,根据人们对客观事物认识的规律,这是一个波浪式前进、螺旋式上升的过程,因此它必须是一个由粗到细,由表及里,多次循环,不断深化的过程。系统动力学将整个构模过程归纳为系统分析、结构分析、模型建立、模型试验和模型使用五大步骤这五大步骤有一定的先后次序,但按照构模过程中的具体情况,它们又都是交叉、反复进行的。 第一步系统分析的主要任务是明确系统问题,广泛收集解决系统问题的有关数据、资料和信息,然后大致划定系统的边界。 第二步结构分析的注意力集中在系统的结构分解、确定系统变量和信息反馈机制。 第三步模型建立是系统结构的量化过程(建立模型方程进行量化)。 第四步模型试验是借助于计算机对模型进行模拟试验和调试,经过对模型各种性能指标的评估不断修改、完善模型。 第五步模型使用是在已经建立起来的模型上对系统问题进行定量的分析研究和做各种政策实验。 3.建模工具 系统动力学软件VENSIM PLE软件 4.建模方法 因果关系图法 在因果关系图中,各变量彼此之间的因果关系是用因果链来连接的。因果链是一个带箭头的实线(直线或弧线),箭头方向表示因果关系的作用方向,箭头旁标有“+”或“-”号,分别表示两种极性的因果链。 第10 章系统动力学模型 系统动力学模型(System Dynamic)是社会、经济、规划、军事等许多领域进行战略研究的重要工具,如同物理实验室、化学实验室一样,也被称之为战略研究实验室,自从问世以来,可以说是硕果累累。 1 系统动力学概述 2 系统动力学的基础知识 3 系统动力学模型 第1 节系统动力学概述 1.1 概念系统动力学是一门分析研究复杂反馈系统动态行为的系统科学方法,它是系统科学的一个分支,也是一门沟通自然科学和社会科学领域的横向学科,实质上就是分析研究复杂反馈大系统的计算仿真方法。 系统动力学模型是指以系统动力学的理论与方法为指导,建立用以研究复杂地理系统动态行为的计算机仿真模型体系,其主要含义如下: 1 系统动力学模型的理论基础是系统动力学的理论和方法; 2 系统动力学模型的研究对象是复杂反馈大系统; 3 系统动力学模型的研究内容是社会经济系统发展的战略与决策问题,故称之为计算机仿真法的“战略与策略实验室” ; 4 系统动力学模型的研究方法是计算机仿真实验法,但要有计算 机仿真语言DYNAMIC勺支持,如:PD PLUS VENSIM等的支持; 5 系统动力学模型的关键任务是建立系统动力学模型体系; 6 系统动力学模型的最终目的是社会经济系统中的战略与策略决策问题计 算机仿真实验结果,即坐标图象和二维报表; 系统动力学模型建立的一般步骤是:明确问题,绘制因果关系图,绘制系统动力学模型流图,建立系统动力学模型,仿真实验,检验或修改模型或参数,战略分析与决策。 地理系统也是一个复杂的动态系统,因此,许多地理学者认为应用系统动力学进行地理研究将有极大潜力,并积极开展了区域发展,城市发展,环境规划等方面的推广应用工作,因此,各类地理系统动力学模型即应运而生。 1.2 发展概况 系统动力学是在20世纪50年代末由美国麻省理工学院史隆管理学院教授福雷斯特(JAY.W.FORRESTERI出来的。目前,风靡全世界,成为社会科学重要实验手段,它已广泛应用于社会经济管理科技和生态灯各个领域。福雷斯特教授及其助手运用系统动力学方法对全球问题,城市发展,企业管理等领域进行了卓有成效的研究,接连发表了《工业动力学》,《城市动力学》,《世界动力学》,《增长的极限》等著作,引起了世界各国政府和科学家的普遍关注。 在我国关于系统动力学方面的研究始于1980 年,后来,陆续做了大量的工作,主要表现如下: 1 )人才培养 自从1980年以来,我国非常重视系统动力学人才的培养,主要采用“走出去,请进来”的办法。请进来就是请国外系统动力学专家来华讲学,走出去就是派留学生,如:首批派出去的复旦大学管理学院的王其藩教授等,另外,还多次举办了全国性的讲习班。 2 )编译编写专著 高三物理专题训练--------弹簧模型(动力学问题) 弹簧是高中物理中的一种常见的物理模型,几乎每年高考对这种模型有所涉及和作为压轴题加以考查。它涉及的物理问题较广,有:平衡类问题、运动的合成与分解、圆周运动、简谐运动、做功、冲量、动量和能量、带电粒子在复合场中的运动以及临界和突变等问题。为了将本问题有进一步了解和深入,现归纳整理如下 弹簧类题的受力分析和运动分析 (一)弹力的特点 1.弹力的瞬时性:弹簧可伸长可压缩,两端同时受力,大小相等,方向相反,弹力随形变量变化而变化。 2.弹力的连续性:约束弹簧的弹力不能突变(自由弹簧可突变) 3.弹力的对称性:弹簧的弹力以原长位置为对称,即相等的弹力对应两个状态。 (二)在弹力作用下物体的受力分析和运动分析 ①考虑压缩和伸长两种可能性 1.在弹力作用下物体处于平衡态—— ②作示意图 ③受力平衡列方程 2.在弹力作用下物体处于变速运动状态 形变 F m F a i ∑=,a 变化 v 变化 位置变化 (a = 0时v max ) (v=0时形变量最大) (1)变量分析:(a )过程——抓住振动的对称性 (b )瞬时 (2)运动计算: (a)匀变速运动 (b)一般运动 ①通过分析弹簧的形变而确定弹力大小、方向的改变,从而研究联系物的运动 ②弹簧处于原长状态不一定是平衡态 ③当作匀变速直线运动时,必有变化的外力作用,变化的外力常存在极值问题 ④充分利用振动特征(振幅、平衡位置、对称性、周期性、F 回与弹力的区别) ⑤临界态——脱离与不脱离:必共速、共加速且N=0 ⑥善用系统牛顿第二定律 针对性练习: 1、如图所示,竖直放置在水平面上的轻质弹簧上端叠放着两个 1 引言 Hamilton动力系统理论有着悠久而丰富的历史,它本身是Lagrange力学的升华与推广,从数学角度看又是一门内容精深的相空间几何学,如辛几何、辛拓扑等都源于此.近几十年来,随着纯数学理论的不断发展与计算机的普遍应用,Hamilton动力系统理论又成为当今非线性科学中极其活跃而富有魅力的研究领域.由于这类系统广泛存在于数理科学、生命科学以及社会科学的各个领域,特别是天体力学、等离子物理、航天科学以及生物工程中的很多模型都以Hamilton系统的形式出现,因此该领域的研究多年来长盛不衰.本文利用Hamilton原理推导出了Hamilton系统的正则方程.最后利用Hamilton正则方程给出一个具体物理实例的数学模型并对其进行动态模拟仿真. 2 预备知识 2.1 状态空间的基本概念 1)状态 任何一个系统在特定时刻都有一个特定的状态,系统在0t 时刻的状态是0t 时刻的一种信息量,它与此后的输入一起惟一地确定系统在0t t ≥时的行为. 2)状态变量 状态变量是一个完全表征系统时间域行为的的最小内部变量组. 3)状态向量 设系统有n 个状态变量,用()()()12,, ,n x t x t x t 表示,而且把这些状态变量看做向量 ()x t 的分量,则向量()x t 称为状态向量,记为 ()()()()12,, ,T n x t x t x t x t =????. 4)状态空间 以状态变量()()()12,,,n x t x t x t 为轴的n 维实向量空间称为状态空间. 5)状态方程 描述系统状态变量与输入变量之间关系的一阶微分方程组(连续时间系统)或一阶差分方程组(离散时间系统)称为系统的状态方程,它表征了输入对内部状态的变换过程,其一般形式为: ()()(),,x t f x t u t t =???? 其中,t 是时间变量,()u t 是输入变量. 6)输出方程 描述系统输出量与系统状态变量和输入变量之间函数关系的代数方程称为输出方程,它表征了系统内部状态变化和输入所引起的系统输出变换,是一个变化过程.输出方程的一 常见弹簧类问题分析 高考要求 轻弹簧是一种理想化的物理模型,以轻质弹簧为载体,设置复杂的物理情景,考查力的概念,物体的平衡,牛顿定律的应用及能的转化与守恒,是高考命题的重点,此类命题几乎每年高考卷面均有所见.应引起足够重视. 弹簧类命题突破要点 1.弹簧的弹力是一种由形变而决定大小和方向的力.当题目中出现弹簧时,要注意弹力的大小与方向时刻要与当时的形变相对应.在题目中一般应从弹簧的形变分析入手,先确定弹簧原长位置,现长位置,找出形变量x 与物体空间位置变化的几何关系,分析形变所对应的弹力大小、方向,以此来分析计算物体运动状态的可能变化. 2.因弹簧(尤其是软质弹簧)其形变发生改变过程需要一段时间,在瞬间内形变量可以认为不变.因此,在分析瞬时变化时,可以认为弹力大小不变,即弹簧的弹力不突变. 3.在求弹簧的弹力做功时,因该变力为线性变化,可以先求平均力,再用功的定义进行计算,也可据动能定理和功能 关系:能量转化和守恒定律求解.同时要注意弹力做功的特点:W k =-(21kx 22-2 1kx 12 ),弹力的功等于弹性势能增量的负值.弹性势能的公式E p = 2 1kx 2 ,高考不作定量要求,可作定性讨论.因此,在求弹力的功或弹性势能的改变时,一般以能量的转化与守恒的角度来求解. 下面就按平衡、动力学、能量、振动、应用类等中常见的弹簧问题进行分析。 一、与物体平衡相关的弹簧问题 1.(1999年,全国)如图示,两木块的质量分别为m 1和m 2,两轻质弹簧的劲度系数分别为k 1和k 2,上面 木块压在上面的弹簧上(但不拴接),整个系统处于平衡状态.现缓慢向上提上面的木块,直到它刚离开上面 弹簧.在这过程中下面木块移动的距离为( ) A.m 1g/k 1 B.m 2g/k 2 C.m 1g/k 2 D.m 2g/k 2 此题是共点力的平衡条件与胡克定律的综合题.题中空间距离的变化,要通过弹簧形变量的计算求出.注意缓慢上提, 说明整个系统处于一动态平衡过程,直至m 1离开上面的弹簧.开始时,下面的弹簧被压缩,比原长短(m 1 + m 2)g /k 2,而m l 刚离开上面的弹簧,下面的弹簧仍被压缩,比原长短m 2g /k 2,因而m 2移动△x =(m 1 + m 2)·g /k 2 - m 2g /k 2=m l g /k 2. 此题若求m l 移动的距离又当如何求解? 参考答案:C 2.S 1和S 2表示劲度系数分别为k 1,和k 2两根轻质弹簧,k 1>k 2;A 和B 表示质量分别为m A 和m B 的两个小物块,m A >m B ,将弹簧与物块按图示方式悬挂起来.现要求两根弹簧的总长度最大则应使( ). A.S 1在上,A 在上 B.S 1在上,B 在上 C.S 2在上,A 在上 D.S 2在上,B 在上 参考答 案:D 3.一根大弹簧内套一根小弹簧,大弹簧比小弹簧长0.2m , 它们的一端固定,另一 突变问题 常见的突变模型 轻绳:只产生拉力,方向沿绳子。绳子的弹力可以突变——瞬时产生,瞬时改变,瞬时消失。 轻弹簧:可产生拉力、支持力,方向弹簧。弹簧的弹力不能突变,在极短的时间内可认为弹力不变。 轻杆:可产生拉力、支持力,方向不一定沿杆。杆的弹力可以突变。 ※典型例题※ 例题1、原来做匀速运动的升降机内有一被伸长的轻质弹簧拉住、具有一定质量的物体A静止放在地板上,如图所示,现发现A突然被弹簧拉向右方,由此可判断,此时升降机的运动可能是 A.加速上升 B.减速上升 C.加速下降 D.减速下降 例题2、如图所示,两小球悬挂在天花板上,a、b两小球用细线连接,上面是一轻质弹簧,a、b两球的质量分别为m,2m,在细线烧断瞬间,两 球的加速度分别是 A.0;g B.-g;g C.-2g;g D.2g;0 例题3、 如图所示,竖直光滑杆上套有一个小球和两根弹簧,两弹簧 的一端各与小球相连,另一端分别用销钉M 、固定于杆上,小球处于静止状态。设拔去销钉M 瞬间。小球加速度的大小为12m/s 2,若不拔去销钉M 而拔去销钉N 瞬间,小球的加速度可能是(取g=10m/s 2) A .22m/s 2,竖直向上 B .22m/s 2,竖直向下 C .2m/s 2,竖直向上 D .2m/s 2,竖直向下 例题4、 如图所示,质量为m 的小球用水平弹簧系住,并用倾角为 30°的光滑木板AB 托住,小球恰好处于静止状态。当木板AB 突然向下撤离的瞬间,小球的加速度为 A .0 B .大小为g ,方向竖直向下 C .大小为 3,方向垂直于木板向下 D .大小为g 3 ,方向水平向右 例题5、 如图所示,质量为m 的物体A 系于两根轻弹簧L 1、L 2上, L 1的一端悬挂在天花板上C 点,与竖直方向的夹角为θ,L 2处于水平位置,左端固定于墙上B 点,物体处于静止状态,下列说法正确的是 A .若将L 2剪断,则剪断瞬间物体加 速度a=gtan θ,方向沿 B 到A B .若将L 2剪断,则剪断瞬间物体加 速度a=gsec θ,方向沿A 到C C .若将L 1剪断,则剪断瞬间物体加速度a=gsec θ,方向沿C 到A D .若将L 1剪断,则剪断瞬间物体加速度a=g ,方向竖直向下 第10章系统动力学模型 系统动力学模型(System Dynamic)是社会、经济、规划、军事等许多领域进行战略研究的重要工具,如同物理实验室、化学实验室一样,也被称之为战略研究实验室,自从问世以来,可以说是硕果累累。 1 系统动力学概述 2 系统动力学的基础知识 3 系统动力学模型 第1节系统动力学概述 1.1 概念 系统动力学是一门分析研究复杂反馈系统动态行为的系统科学方法,它是系统科学的一个分支,也是一门沟通自然科学和社会科学领域的横向学科,实质上就是分析研究复杂反馈大系统的计算仿真方法。 系统动力学模型是指以系统动力学的理论与方法为指导,建立用以研究复杂地理系统动态行为的计算机仿真模型体系,其主要含义如下: 1 系统动力学模型的理论基础是系统动力学的理论和方法; 2 系统动力学模型的研究对象是复杂反馈大系统; 3 系统动力学模型的研究内容是社会经济系统发展的战略与决策问题,故称之为计算机仿真法的“战略与策略实验室”; 4 系统动力学模型的研究方法是计算机仿真实验法,但要有计算 机仿真语言DYNAMIC的支持,如:PD PLUS,VENSIM等的支持; 5 系统动力学模型的关键任务是建立系统动力学模型体系; 6 系统动力学模型的最终目的是社会经济系统中的战略与策略决策问题计算机仿真实验结果,即坐标图象和二维报表; 系统动力学模型建立的一般步骤是:明确问题,绘制因果关系图,绘制系统动力学模型流图,建立系统动力学模型,仿真实验,检验或修改模型或参数,战略分析与决策。 地理系统也是一个复杂的动态系统,因此,许多地理学者认为应用系统动力学进行地理研究将有极大潜力,并积极开展了区域发展,城市发展,环境规划等方面的推广应用工作,因此,各类地理系统动力学模型即应运而生。 1.2 发展概况 系统动力学是在20世纪50年代末由美国麻省理工学院史隆管理学院教授福雷斯特(JAY.W.FORRESTER)提出来的。目前,风靡全世界,成为社会科学重要实验手段,它已广泛应用于社会经济管理科技和生态灯各个领域。福雷斯特教授及其助手运用系统动力学方法对全球问题,城市发展,企业管理等领域进行了卓有成效的研究,接连发表了《工业动力学》,《城市动力学》,《世界动力学》,《增长的极限》等著作,引起了世界各国政府和科学家的普遍关注。 在我国关于系统动力学方面的研究始于1980年,后来,陆续做了大量的工作,主要表现如下: 1)人才培养 弹簧模型(动力学问题)doc 高中物理 [模型概述] 弹簧模型是高考中显现最多的模型之一,在填空、实验、运算包括压轴题中都经常显现,考查范畴专门广,变化较多,是考查学生推理、分析综合能力的热点模型。 [模型讲解] 一. 正确明白得弹簧的弹力 例1. 如图1所示,四个完全相同的弹簧都处于水平位置,它们的右端受到大小皆为F 的拉力作用,而左端的情形各不相同:①中弹簧的左端固定在墙上。②中弹簧的左端受大小也为F 的拉力作用。③中弹簧的左端拴一小物块,物块在光滑的桌面上滑动。④中弹簧的左端拴一小物块,物块在有摩擦的桌面上滑动。假设认为弹簧的质量都为零,以l 1、l 2、l 3、l 4依次表示四个弹簧的伸长量,那么有〔 〕 ① ② ③ ④ 图1 A. l l 21> B. l l 43> C. l l 13> D. l l 24= 解析:当弹簧处于静止〔或匀速运动〕时,弹簧两端受力大小相等,产生的弹力也相等,用其中任意一端产生的弹力代入胡克定律即可求形变。当弹簧处于加速运动状态时,以弹簧为研究对象,由于其质量为零,不管加速度a 为多少,仍旧能够得到弹簧两端受力大小相等。由于弹簧弹力F 弹与施加在弹簧上的外力F 是作用力与反作用的关系,因此,弹簧的弹力也处处相等,与静止情形没有区不。在题目所述四种情形中,由于弹簧的右端受到大小皆为F 的拉力作用,且弹簧质量都为零,依照作用力与反作用力关系,弹簧产生的弹力大小皆为F ,又由四个弹簧完全相同,依照胡克定律,它们的伸长量皆相等,因此正确选项为D 。 二. 双弹簧系统 例2. 〔2004年苏州调研〕用如图2所示的装置能够测量汽车在水平路面上做匀加速直线运动的加速度。该装置是在矩形箱子的前、后壁上各安装一个由力敏电阻组成的压力传感器。 有关弹簧问题的专题复习 纵观历年高考试题,和弹簧有关的物理试题占有相当的比重,高考命题者常以弹簧为载体设计出各类试题,这类试题涉及到静力学问题、动力学问题、动量守恒和能量守恒问题、振动问题、功能关系问题,几乎贯穿于整个力学知识体系,为了帮助同学们掌握这类试题的分析方法,同时也想借助于弹簧问题,将整个力学知识有机地结合起来,让同学们对整个力学知识体系有完整的认识,特将有关弹簧问题分类研究如下. 一、弹簧中的静力学问题 在含有弹簧的静力学问题中,当弹簧所处的状态没有明确给出时,必须考虑到弹簧既可以处于拉伸状态,也可以处于压缩状态,必须全面分析各种可能性,以防以偏概全. 【例1】(2002年广东省高考题)如图所示,a、b、c为三个物块,M、N 为两个轻质弹簧,R为跨过光滑定滑轮的轻绳,它们均处于平衡状 态.则:() A.有可能N处于拉伸状态而M处于压缩状态 B.有可能N处于压缩状态而M处于拉伸状态 C.有可能N处于不伸不缩状态而M处于拉伸状态 D.有可能N处于拉伸状态而M处于不伸不缩状态 【解析】研究a、N、c系统由于处于平衡状态,N可能处于拉伸 状态,而M可能处于不伸不缩状态或压缩状态;研究a、M、b系 统由于处于平衡状态,M可能处于压缩状态(或处于不伸不缩状态),而N可能处于不伸不缩状态或拉伸状态.综合分析,本题只有A、D正确. 【例2】.如图所示,重力为G的质点M与三根相同的轻质 弹簧相连,静止时,相邻两弹簧间的夹角均为120 ,已知弹 簧A、B对质点的作用力均为2G,则弹簧C对质点的作用 力大小可能为() A.2G B.G C.0 D.3G 【解析】弹簧A、B对M的作用力有两种情况:一是拉伸时对M的拉力,二是压缩时对M的弹力. 若A、B两弹簧都被拉伸,两弹簧拉力与质点M重力的合力方向一定竖直向下,大小为3G,此时弹簧C必被拉伸,对M有竖直向上的大小为3G的拉力,才能使M 处于平衡状态. 若A、B两弹簧都被压缩,同理可知弹簧C对M有竖直向下的大小为G的弹力.A、B两弹簧不可能一个被拉伸,一个被压缩,否则在题设条件下M不可能平衡.故本题选B、D. 【例3】(1999年全国高考题)如图所示,两木块的质量分别为m1和m2,两轻质弹簧的劲度系数分别为k1和k2,上面木块压在上面的弹簧上(但不拴接),整个系统处于平衡状态.现缓慢向上提上面的木块,直到它刚离开上面弹簧.在这过程中下面木块移动的距离为() “弹簧与物块的分离”模型 模型建构: 两个物体与弹簧组成的系统。两个物体在运动到某一位置时就会分开,那么这个位置就是物体间的分离点。 【模型】弹簧与物块的分离 【特点】①都要建立动力学方程;②分离条件是:相互作用的弹力F N =0 这个问题可以分成两类“模型”: 【模型1】水平面上“弹簧与木块的分离”模型 如图1,B 与弹簧相连,而A 、B 是紧靠在一起的 两个物体,当弹簧原来处于压缩状态,如果地面是光滑 的,则物体A 、B 在向左运动的过程中A 、B 何时分离。 〖解析〗物体应在弹簧的原长处分离。由于水平面 光滑,当弹簧从压缩状态回到自然伸长位置时,一直加 速运动。当它刚刚回到平衡位置时,物块B 受的弹力为阻力,开始减速。而物块A 不受外力做匀速直线运动。v A ≥v B 此时A 、B 分离。 【体验1】但是如果物体与地面之间是不光滑的,题目条件如模型1。试讨论分离条件。 〖解析〗假设A 、B 在某一位置分离,此时刻两物体的相互作用力为零F AB =0 同时,两物体的加速度相同。 则A A a g μ=;B B B kx a g m μ=+ 所以()A B g x k μμ-= 讨论: (1)如果A μ等于B μ或均为零;x 等于零。两物体在O 点分离; (2)如果A μ大于B μ,x 大于零,两物体在O 点的右侧分离; (3)如果A μ小于B μ,x 大于零,两物体的分离点在O 点的左侧。 〖点评〗两物体分离的条件是:相互间的弹力F N =0等于零;两物体瞬时加速度相等。 【模型2】竖直面上“弹簧与木块的分离”模型 如图2所示,轻质弹簧上面固定一块质量不计的薄板,在薄板上放重物,用手将重物向下压缩到一定程度后,突然将手撤去,重物何时与木板分离? 〖解析〗当物体分离时,物体间的弹力F N =0 物块只受重力,物块的加速度为g ,木板的加速度也为g 弹簧的状态应为原长,即弹簧恢复原长时,二者分离 此时物块与薄板有共同的加速度。 从动力学的角度可以得到,竖直方向的弹簧类问题两物体的分离点是在弹簧的原长处。 模型典案: 图1 A B O 图2 m M 模型组合讲解——弹簧模型(动力学问题) [模型概述] 弹簧模型是高考中出现最多的模型之一,在填空、实验、计算包括压轴题中都经常出现,考查范围很广,变化较多,是考查学生推理、分析综合能力的热点模型。 [模型讲解] 一. 正确理解弹簧的弹力 例1. 如图1所示,四个完全相同的弹簧都处于水平位置,它们的右端受到大小皆为F 的拉力作用,而左端的情况各不相同:①中弹簧的左端固定在墙上。②中弹簧的左端受大小也为F 的拉力作用。③中弹簧的左端拴一小物块,物块在光滑的桌面上滑动。④中弹簧的左端拴一小物块,物块在有摩擦的桌面上滑动。若认为弹簧的质量都为零,以l 1、l 2、l 3、l 4依次表示四个弹簧的伸长量,则有( ) ① ② ③ ④ 图1 A. l l 21> B. l l 43> C. l l 13> D. l l 24= 解析:当弹簧处于静止(或匀速运动)时,弹簧两端受力大小相等,产生的弹力也相等,用其中任意一端产生的弹力代入胡克定律即可求形变。当弹簧处于加速运动状态时,以弹簧为研究对象,由于其质量为零,无论加速度a 为多少,仍然可以得到弹簧两端受力大小相等。由于弹簧弹力F 弹与施加在弹簧上的外力F 是作用力与反作用的关系,因此,弹簧的弹力也处处相等,与静止情况没有区别。在题目所述四种情况中,由于弹簧的右端受到大小皆为F 的拉力作用,且弹簧质量都为零,根据作用力与反作用力关系,弹簧产生的弹力大小皆为F ,又由四个弹簧完全相同,根据胡克定律,它们的伸长量皆相等,所以正确选项为D 。 二. 双弹簧系统 例2. (2004年苏州调研)用如图2所示的装置可以测量汽车在水平路面上做匀加速直线运动的加速度。该装置是在矩形箱子的前、后壁上各安装一个由力敏电阻组成的压力传感器。用两根相同的轻弹簧夹着一个质量为2.0kg 的滑块,滑块可无摩擦的滑动,两弹簧的另一端分别压在传感器a 、b 上,其压力大小可直接从传感器的液晶显示屏上读出。现将装置沿运动方向固定在汽车上,传感器b 在前,传感器a 在后,汽车静止时,传感器a 、b 的示数均为10N (取g m s =102 /) 图2 (1)若传感器a 的示数为14N 、b 的示数为6.0N ,求此时汽车的加速度大小和方向。 (2)当汽车以怎样的加速度运动时,传感器a 的示数为零。 解析:(1)F F ma 121-=,a F F m m s 112240= -=./ a 1的方向向右或向前。 (2)根据题意可知,当左侧弹簧弹力F 10'=时,右侧弹簧的弹力F N 220'= F ma 22'= 代入数据得a F m m s 22210= ='/,方向向左或向后 [模型要点] 弹簧中的力学问题主要是围绕胡克定律F kx =进行的,弹力的大小为变力,因此它引起的物体的加速度、速度、动量、动能等变化不是简单的单调关系,往往有临界值,我们在处理变速问题时要注意分析物体的动态过程,为了快捷分析,我们可以采用极限方法,但要注意“弹簧可拉可压”的特点而忽略中间突变过程,我们也可以利用弹簧模型的对称性。 [模型演练] (2005年成都考题)如图3所示,一根轻弹簧上端固定在O 点,下端系一个钢球P ,球处于静止状态。现对球施加一个方向向右的外力F ,吏球缓慢偏移。若外力F 方向始终水平,移动中弹簧与竖直方向的夹角θ<90 且弹簧的伸长量不超过弹性限度,则下面给出弹簧伸长量x 与cos θ的函数关系图象中,最接近的是( ) 涉及弹簧的力学问题 1.弹簧的作用力分析 弹簧在弹性限度内,产生的弹力遵从胡克定律f=kx ,式中x 指相对原长的形变量。当形变量变化Δx 时,弹力也发生相应的变化Δf ,且Δf=k Δx 。 例1 如图1,轻弹簧上端固定,下端挂一质量为m o 的平盘,盘内放一质量为m 的物体。当盘静止时,弹簧的长度比其自然长度伸长了L 。今向下拉盘,使弹簧再伸长ΔL 后停止,然后松手放开。设弹簧总处在弹性限度内,则刚松开手时,盘对物体的支持力等于 (A)(1十ΔL /L)mg (B)(1十ΔL /L)(m 十m 。)g (C) ΔL(m 十m 。)g/L (D) ΔL ·mg /L 解析:对系统,静止时 kL =(m 十m o )g ① 再下拉ΔL 后松手瞬间,有 k(L+ΔL)—(m+m 。)g =(m+m 。)a ② 由①②得k ΔL =(m 十m 。)a ③ 图1 此时系统所受的合外力为k ΔL ,也可直接用Δf=k Δx 得出。 对物体m :N 一mg =ma ④ 联立③④得N =(1十ΔL/L)·mg 本题也可用特殊值验证:令ΔL =0,N =mg 只有选项(A)正确。 2.弹簧振子的运动分析 例2 一弹簧振子作简谐振动,周期为T 。 (A)若t 时刻和(t 十Δt)时刻振子运动的位移大小相等、方向相同,则Δt 一定等于T 的整数倍。 (B)若t 时刻和(t 十Δt)时刻振子运动速度大小相等、方向相反,则一Δt 定等于T /2的整数倍 (C)若Δt =T ,则t 时刻和(t 十Δt)时刻振子运动的加速度一定相等 (D)若Δt =T /2,则T 时刻和(t 十Δt)时刻弹簧的长度一定相等 解析 (1)弹簧振子作简谐振动,其位移x 一时间t 关系图线 应是正弦或余弦曲线。设为正弦曲线,如图2,并在图上找出t 和 (t 十Δt)两个时刻及其对应的a 、b 两点。 (2)从x 一t 图上可看出,虽然t 和(t 十Δt)两时刻振子位移x 大小相等、方向相同,但时间Δt 可不等于T 的整数倍,故选项(A)错。 (3)已知过x 一t 图线上某点的切线斜率表示速度。由图可看出,过a 、b 两点所作切线的斜率大小相等、符号相反(表示速度方向相反),但Δt 不等于T /2的整数倍,故选项(B)错。 (4)若Δt =T ,由简谐振动的周期性可知,和(t 十Δt)两时刻振子的位移一定等大同向,故两时刻的受力完全相同,振子的加速度一定相等,故选项(C)正确。 (5)若Δt =T /2,则可从x 一t 图明确看出,若t 时刻弹簧被拉伸,则(t 十Δt)时刻弹簧被压缩,二者的长度不等,故选项(D)错。 3.弹簧储能变化分析 例3 质量为m 的钢板与直立轻弹簧上端连结,弹簧下端固定在地上。平衡时,弹簧的压缩量为x 0,如图3。一物体从钢板正上方距离为3x 0的A 处自由落下,打在钢板上并立刻与钢板一起向下运动,但不粘连。它们到达最低点后又向上运动。已知物体质量也为m 时,它们恰能回到O 点。若物块质量为2m ,仍从A 处自由落下,则物块和钢板回到O 点时,还具有向上的速度,求物块向上运动到达的最高点与O 点的距离。 解析 物块与钢板相碰前的速度 ① 设V 1表示质量为m 的物块与钢板碰撞后一起向下运动的速度,因碰撞时间极短 006gx V 动力学系统建模课程报告 神经网络综述 1 神经网络介绍 1.1 神经网络概述 人工神经网络简称为神经网络或称作连接模型,它是一种模范动物神经网络行为特征,进行分布式并行信息处理的算法数学模型。这种网络依靠系统的复杂程度,通过调整内部大量节点之间相互连接的关系,从而达到处理信息的目的。人工神经网络可以看成以人工神经为节点,用有向加权弧连接起来的有向图,有向弧的权值表示两个人工神经元相互作用的强弱。人工神经网络模拟人类大脑神经元结构及处理问题的方式,成为为人工智能控制上的一大创新。 人工神经网络主要优点是能够自适应样本数据,不会被噪音等影响;能够处理来自多个资源和决策系统的数据;能够提供简单工具进行特征选取,产生有用的数据表示;可作为专家系统的前端;有十分快的优化功能。神经网络可以处理非线性适应性信息,克服了传统人工智能方法对于直觉的缺陷,使之在神经专家系统、模式识别、智能控制、组合优化、预测等领域取得成功应用。 1.2人工神经网络基本要素 人工神经元四个基本要素: (1) 连接权,用于表示各个神经元的连接强度,正值表示加强,负值表示削弱,对应生物神经元的突触。 (2) 求和单元,求取对应节点输入信号的加权和,对输入信号求加权和即求解神经节点的输入信号。数学表达式:j p j kj k x w u ∑==1。 (3) 激活函数,相当于细胞体的功能,对输入的信号进行非线性映射,使输出幅值限制在一定范围内。输出表达式:)(k k net g y =。激活函数有阶跃函数、分段线性函数、sigmoid 函数及双曲正切对称S 型函数。 (4) 阀值,其作用可用数学表达式来表示:k k k u net θ-=。 1.3人工神经网络的工作方式 其工作过程主要分为两个阶段: (1) 学习期,此时每一个计算单元的状态不变,样本数据进行输入,得到实际输出,与期望输出进行对比得出输出误差,根据输出误差修改权值,直至系统参数满足输出误高三物理 弹簧中的动力学问题(上)
橡胶弹簧
弹簧模型(动力学问题)
高中物理经典问题---弹簧类问题全面总结解读
(完整版)系统动力学模型案例分析
系统动力学模型
弹簧模型—力学问题#(优选.)
哈密顿系统的数学建模与动力学分析.
常见弹簧类问题分析
力学中的突变问题 完美版
系统动力学模型
弹簧模型(动力学问题)doc高中物理
有关弹簧问题的专题复习
弹簧与物块的分离问题----教师版
模型组合讲解——弹簧模型(动力学问题)
涉及弹簧的力学问题
(完整word版)动力学建模之神经网络
相关主题
文本预览