10
装卸机器人
上海正在向国际航运中心迈进,未来的码头将是各种机械群雄竞技的舞台。机器是人力的扩大与延伸。如吊车能够抓起人力远远不及的重物,但机器的灵巧程度比起人手来还是有些逊色,于是如何使机器抓手抓得多、抓得快、抓得安全,就成为工程师研究的课题,工程师包起帆因此发明了许多抓斗,成为了抓斗大王。作为未来工程师,你想体验一下抓斗的魅力吗?
比赛规则
一、 任务
设计和制作一台能搬运“集装箱”、“圆木”和“球状物”的机器,并按比赛要求完成规定的装卸任务。
二、 规则
1. 机器:
a ) 机器可以行走、抓取物品和装载物体,并通过有线或无线进行遥控。
b ) 机器要装有能抓取“集装箱”、“圆木”和“乒乓球”的抓斗,一个机器上只能有一
套控制、驱动和抓斗,也不能有为第二套抓斗预设的(对于本套抓斗不起作用的)其它构件。当调换搬运物体时,必须由参赛学生当场拆卸原先的抓斗装置,然后装上新的抓斗装置。不允许有二套抓斗装置或一套装置上有二种抓斗。
c ) 机器的尺寸不能超过60×60×60cm ,重量不限。如果是有线控制,则线的长度至少
要大于1.5m 。如果是无线电遥控,则接收天线不受机器的尺寸限制。
2. 搬运的物体:
a ) “集装箱”:尺寸为10×10×20 cm ,材质为KT 板,实芯。共两个,堆成二层。
b ) “圆木”:直径2 cm 、长度20 cm 的PVC 管,两头封闭。数量为21根,堆砌成三角
状(即底层6根,共6层)。
c ) “球状物”:直径4 cm 的乒乓球。数量为40只,放在一个面积为35×35cm ,围边
高4 cm 的容器内。
3. 搬运:
a ) 机器从起点出发,首先搬运圆木,将圆木搬运到2m 远的规定区域。
b ) 更换抓斗,更换时间包含在整个比赛内。
c ) 然后将机器放回起点再出发去,搬运乒乓球,将乒乓球搬运到2m 远的同样尺寸的
容器内。当全部乒乓球搬运到规定区域后,比赛结束。
4. 排位赛:
a ) 完成两项搬运任务。
b ) 遵从任务优先原则排定名次。
c ) 在规定时间内搬运完全部物品,则以速度为得分点
d ) 在规定时间内没有搬运完全部物品,则以搬运成功的物品的数量为得分点,每件得
分为1分。
e ) 搬运时间为4分钟。
5. 对抗赛:
a) 根据排位赛名次进行抽签配对。
b) 最先完成所有任务方为胜。
c) 胜者进入下一轮对抗赛,负方既遭淘汰。
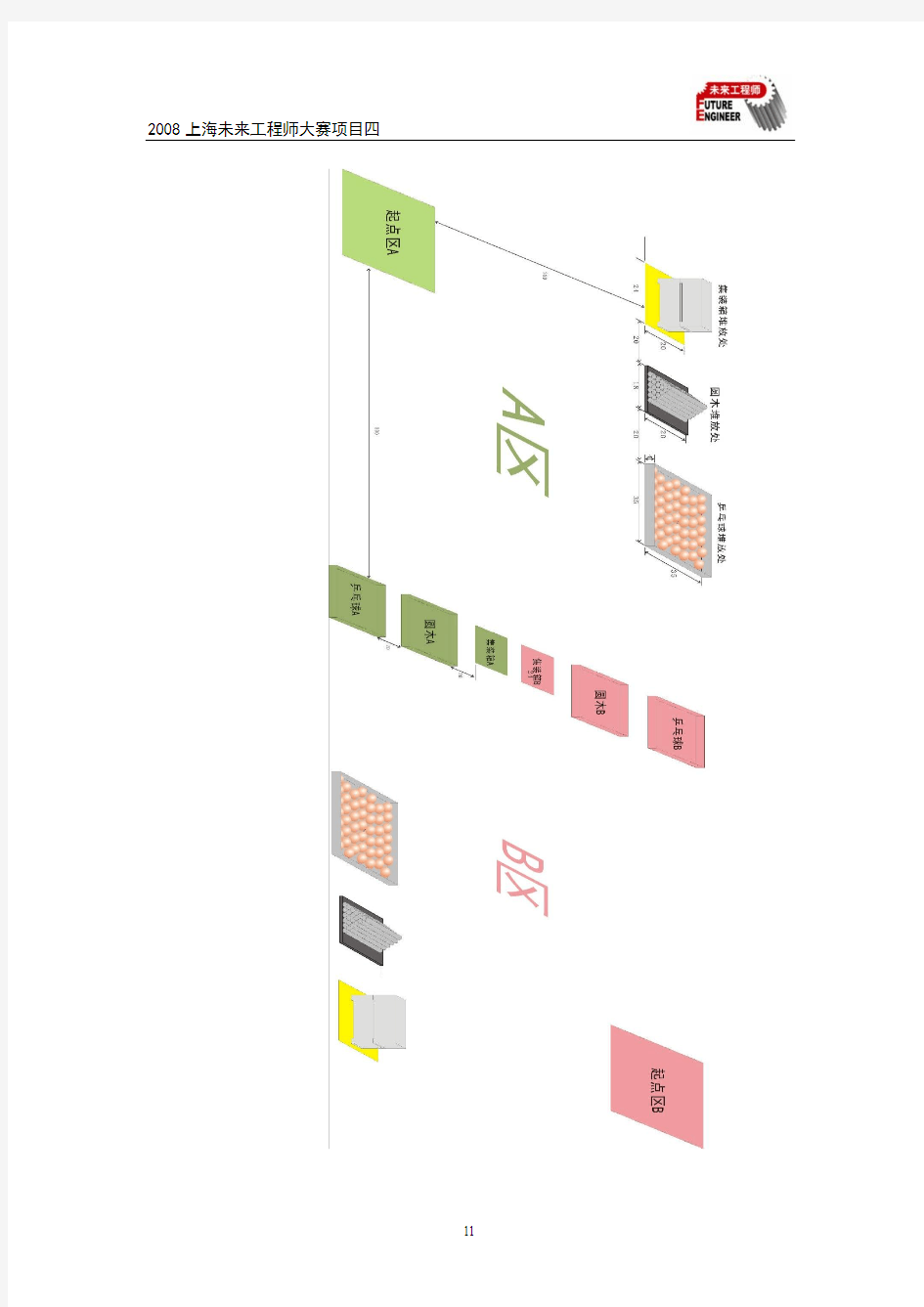
6. 场地图:
11
目录 一、集装箱吊具------------------------------------------- 3 二、集装箱装卸船机械--------------------------------- 6 三、集装箱水平运输机械------------------------------ 13 四、集装箱堆场作业机械------------------------------ 14 五、集装箱的结构---------------------------------------- 21 六、集装箱的标识---------------------------------------- 23
第一节、集装箱吊具 一、 集装箱简易起吊方法 当在非集装箱专用码头上装卸集装箱时,可以采用钢丝绳用吊钩起吊。 其中a )、b )、c )种方式由于受力状态不好,一般只适用于轻箱、小箱。图4-5 d )使用的方法在起吊大箱时,对夹角min α有如下的要求 min α
二、集装箱专用吊具 集装箱专用吊具(Spreader)是用于起吊集装箱的属具,主要有3种类型:固定式、组合式和自动式。 1.固定式吊具:是一种只能起吊一种集装箱 的吊具(见图4-6),其特点是结构简单、自重轻,价格便宜,但是对箱体类型的适应性较差。 更换吊具往往要占用较多时间。 2.组合式吊具:将起吊不同尺寸的集装箱的 吊具组合使用的一种集装箱专用吊具。其特点是结构简单,自重较自动式要小(一般为4-7t)这种吊具多用于跨运车和正面吊上。
3.自动式吊具:通过伸缩臂,可以改变吊具的臂长,以达到起吊不同尺寸集装箱的要求。特点:使用灵活,自重较大,9—10t。集装箱装卸桥广泛使用。 4.双箱吊具:用一个集装箱吊具可同时起吊两个20ft的集装箱的一种专用吊具,双箱起吊方法可以大大提高船舶的装卸效率。
《机器人技术及应用》综合 习题 -标准化文件发布号:(9456-EUATWK-MWUB-WUNN-INNUL-DDQTY-KII
《机器人技术及应用》综合习题 一、判断 1.机器人是在科研或工业生产中用来代替人工作的机械装置。(对) 2. 19世纪60年代和20世纪70年代是机器人发展最快、最好的时期,这期间的各项研究发明有效地推动了机器人技术的发展和推广。(错) 3. 对于机器人如何分类,国际上没有制定统一的标准,有的按负载量分,有的按控制方式分,有的按自由度分,有的按结构分,有的按应用领域分。(对) 4. 所谓特种机器人就是面向工业领域的多关节机械手或多自由度机器人。(错) 5. 机器人机械本体结构的动作是依靠关节机器人的关节驱动,而大多数机器人是基于开环控制原理进行的。(错) 6. 机器人各关节伺服驱动的指令值由主计算机计算后,在各采样周期给出,由主计算机根据示教点参考坐标的空间位置、方位及速度,通过运动学逆运算把数据转变为关节的指令值。(对) 7. 为了与周边系统及相应操作进行联系与应答,机器人还应有各种通信接口和人机通信装置。(对) 8. 轮式机器人对于沟壑、台阶等障碍的通过能力较高。(错) 9. 为提高轮式移动机器人的移动能力,研究者设计出了可实现原地转的全向轮。(对) 10. 履带式机器人是在轮式机器人的基础上发展起来的,是一类具有良好越障能力的移动机构,对于野外环境中的复杂地形具有很强的适应能力。(对) 11. 腿式(也称步行或者足式)机构的研究最早可以追溯到中国春秋时期鲁班设计的木车马。(对) 12. 机器人定义的标准是统一的,不同国家、不同领域的学者给出的机器人定义都是相同的。(错) 13. 球形机器人是一种具有球形或近似球形的外壳,通过其内部的驱动装置实现整体滚动的特殊移动机器人。(对) 14. 可编程机器人可以根据操作员所编的程序,完成一些简单的重复性操作,目前在工业界已不再应用。(错) 15. 感知机器人,即自适应机器人,它是在第一代机器人的基础上发展起来的,具有不同程度的“感知”能力。(对) 16. 第三阶段机器人将具有识别、推理、规划和学习等智能机制,它可以把感知和行动智能化结合起来,称之为智能机器人。(对) 17. 工业机器人的最早研究可追溯到第一次大战后不久。(错) 18. 20世纪50年代中期,机械手中的液压装置被机械耦合所取代,如通用电气公司的“巧手人”机器人。(错)
行业资料:________ 装卸工及随车装卸人员安全操作规程 单位:______________________ 部门:______________________ 日期:______年_____月_____日 第1 页共5 页
装卸工及随车装卸人员安全操作规程 1、随车出发前,应根据交代任务,带好有关工具和安全标志。 2、车辆倒车时应下车负责指挥,并注意周围情况;推车时应站在车身后面,以免发生危险;车辆行驶时,不要瞌睡,不要与司机谈话和点烟。 3、不准拨弄各种构件和无照驾驶。 4、空车行驶时,不准悬空站在车上,应紧握扶手;装货时,就在车厢中空出适当安全位置,以便装卸工坐立;要注意刹车防止货物移动伤人。 5、车辆在行进途中遇到转弯或停车时,应配合驾驶员用红旗示意指挥行人和其他车辆,并协助司机,注意行人动态,及时招呼配合。 6、车未停稳,不得上下(包括人和货物)车上载运货物,如发现有不安全情况,应通知驾驶员停车,采取加固措施,以免发生危险。 7、必须等车辆停妥后,方可按次序进行装卸,不要抢装抢卸。操作时,相互间要保持适当距离,以免碰伤人。机械卸货,要现场指挥确保安全。 8、架设跳板时注意牢固,搭好后应先试走,拖抬货物上下要互相配合好。 9、装货时,一定要将货物装稳、扎牢、有安全措施,货物装好后及途中应检查绳索、垫木等物件是否牢固,捆紧,有无倒坍、前冲等危险。在装运大构件上面不准用园铁滚垫衬,前面不准站立人,防止急刹车时货物冲击伤人。 10、用机动车辆装运货物时,不得超载、超高、超长、超宽,如遇 第 2 页共 5 页
必须超高、宽、长装运时,应按交通安全管理规定,要有可靠措施和明显标志。 11、堆放物件不可歪斜,高度要适当,对易滑动件要用木块垫塞,不准将物件堆放在安全道内。 12、严格遵守易燃、易爆及化学危险物品装卸运输的有关规定。装卸有毒气散发的物品,应配戴必要的防护用品,装运易燃易爆化学危险品严禁与其他货物混装,要轻搬轻放,搬运场地不准吸烟,车厢内不准坐人。 13、装卸货物应按规定吊点起吊,严禁在吊场下面站人。 装卸工安全技术操作规程 1.严格遵守易燃易爆及危险化学物品装卸运输的有关规定。装卸分散材料及有毒气散发的物品,应佩戴适用的防护用品。 2.工作前应认真检查所用工具是否完好可靠,不准超负荷使用。 3.装卸时应做到轻装轻放,重不压轻,大不压小,堆放平稳,捆扎牢固。 4.人工搬运、装卸物件应视物件轻重配备人员。抬杠、撬棍、跳板、绳索等工具必须完好可靠。多人搬运同一物件时,要有专人指挥,并保持一定间隔,一律顺肩,步调一致。 5.堆放物件不可歪斜,高度要适当,对易滑动件要用木块垫塞,不准将物件堆放在安全道内。 第 3 页共 5 页
第19卷第6期1998年11月 江 苏 理 工 大 学 学 报 Journal of Jiangsu University of Science and Technology Vol119No16 Nov.1998 堆垛机器人控制系统的研究 杨 年 法 摘 要 介绍一种用于烟草行业中的物料系统堆垛机器人,采用工业控制机作为主计算机实现系统的监控和作业管理,单片机作为位置伺服控制,完成PI D控制算 法,由主计算机协调各关节的运动,准确地跟踪轨迹规划,使速度达到完全可控. 关键词 机器人 监控系统 算法 数学模型 中图分类号 TP24 堆垛工业机器人,是应用于烟草行业中的物料流系统堆垛用的机器人,它由以下三个主要部分组成:控制系统;测量和伺服系统;机械系统.控制系统包括工业控制计算机及存贮器,用以控制机器人和外围设备连锁用的输入输出接口装置、控制联网通讯以及控制机器人的伺服系统.测量和伺服系统包括运动控制器、伺服放大驱动器和装有位置、速度反馈的交流伺服电动机.位置调节和速度控制是由一个光电编码器系统来实现的,这个系统由一个带有辅助电源的编码器电路等组成.机器人的机械系统包括堆垛机器人和伺服电动机的旋转运动转换成所需运动的传动机构,它可做以下运动:旋转(整个堆垛机器人绕着基座旋转)、前后运动和上下运动(臂部综合运动)、手腕回转运动.其结构如图1所示. 图1 堆垛机器人结构图 收稿日期:1998205229 杨年法 江苏理工大学电气系 镇江市 212013
控制系统的基础是一台工业控制计算机,它将控制程序存放在存贮器中.这个程序是固定的,它指挥计算机去执行各种堆垛机器人的指令和控制功能,操作人员和控制系统之间的信息传递通过控制屏、编程器和功能键来实现.工业控制计算机有规则地对控制的情况进行检测和扫描,并通过LE D 的亮、灭和音响读出回答信号.工业控制计算机监督和控制工作过程以及控制系统之间的输入输出信号,例如所需的移动是在某一轴上,就发出指令给轴装置. 使用者应用编程器,通过一个特殊的运动模式给机器人编程.操作者应用功能键指挥堆垛机器人的每一个运动.其位置和速度信号存放在工业控制计算机的存贮器中,堆垛机器人常用的工作信息也可编成程序,贮存在存贮器中. 1 堆垛机器人运动控制 堆垛机器人用四个自由度来确定机器人在空间的位置.四个主要坐标是整个机器人绕着 基座旋转运动(φ)和两个在垂、水平面内的手臂运动坐标,一个下臂( θ)和一个上臂(α),还有一个手腕回转运动( υ).所有这四个主要运动全部采用交流伺服电动机控制位置和速度,均能满足克服大惯性力矩和快速性以及精确定位的要求. 旋转本体的驱动装置牢固地安装在基座上,它通过一个减速齿轮机构绕着基座转动本体. 除了旋转( φ)本体的驱动装置外,上臂和下臂的坐标系的驱动装置都安装在堆垛机器人的旋转本体上.臂部运动靠球形螺杆,通过连杆和杠杆使臂部动作.臂部的前后( θ)运动使腕部也作前后方向移动,臂部的上下( α)运动同样使腕部带动抓具也作上下方向移动.堆垛机器人的腕部由固定在手臂(上臂)的端部一台交流伺服电动机驱动,可以改变它的速度和力矩.抓具采用夹爪方式,夹爪也采用伺服电机驱动.其控制系统方框图如图2所示 1 图2 堆垛机器人控制方框图 堆垛机器人为全电气控制,工作稳定、可靠.堆垛机器人各关节在运动过程中抓具始终保68 江 苏 理 工 大 学 学 报 1998年11月
装卸员工安全操作规程 一.装卸作业: 1.作业前先检查地形,机器,发现不安全之处必须找有关管理人 员采取安全措施后,方可作业。 2.囤垛下面不准休息和停放车辆。 3.原包作业,不准带手套。 4.在使用机电设备时要按该机使用规程执行。 5.下雨露天作业,严禁使用机电设备; 6.临时用电必须请电工接线。 7.装卸粮食有霉变、发热的物品应及时与上级领导或品控员反 映。 8.在装卸火车时发现装毒品而未消毒的车辆,应立即向上级领导 或品控员反映,采取措施。 9.在有装卸工作业的现场工作,要防止砸、碰、磕伤。 10.在作业过程中不准横跨或蹬机器穿行。 11.装卸车时,在车辆未停稳前或开动后或中途挂车,车门放下关 好。所有工作人员下车,禁止装卸作业。 二.码垛拆垛: 1.码垛垛高应符合规定,不得超高, 2.按品种分类,保证垛身平直,不凸不凹,层底清楚,件数准确; 3.露天码垛,铺垫物枕木要摆均码齐,底席不脱节,不漏粮,不 塌包,无存粮。 4.拆垛前应先检查货位有无危险,如有倒塌危险或囤垛向外倾斜
时,
应立即远离倒塌方向,及时采取措施或翻倒,待无危险时方可 作业。 5.要根据出库数量,由一头自上而下进行,严禁由中间抽垛。 6.严禁在货位间跨越,以防掉下造成误伤,不准攀登输送机. 三.使用输送机注意事项: 1.机器上缺少安全装置,不准使用。 2.接线时开关放在停的位置上,先接机器,后接电源。遇停电时关闭开关、拉下闸、拔下插销头,方能离开。 3.输送机下严禁站人并挂好“严禁站人”警示牌。 4.移动机器时,必须先关闭开关、切断电源、方能移动。机上严禁坐人,推动时需有人看护和指挥,不准猛闯、猛推、猛放,防止触电和撞物、伤人。 5.机器发生故障,如皮带跑偏、螺丝松动、机器发生异常响声等,要立即停止使用,找专业人员维修。 四.其他: 1.一切电气设备安装维修工作,必须由专业电气人员处理,非专业人员禁止操作。 2.凡从事二米以上无法采取可靠防护设施的高处作业,必须系安全带,采取可靠的保护措施,并设有专人监护。 (注:文件素材和资料部分来自网络,供参考。请预览后才下载,期待你的好 评与关注。)
摘要 本文运用大学所学的知识,提出了自动堆垛式载运机器人的结构组成、工作原理以及主要零部件的设计中所必须的理论计算和相关强度校验,构建了自动堆垛式载运机器人总的指导思想,从而得出了该自动堆垛式载运机器人的优点是高效,经济,并且安全系数高,对提高货物搬运以及装配效率,减少人工投入等等起到了很大的作用的结论。 该自动堆垛式载运机器人是对传统的多自由度机器人的工作原理进行理解,本机器人由底盘、回转机构、升降机构、平移机构、手爪和驱动机构组成。该机器人能实现多个自由度,从而可以从多方位多角度来对货物进行搬运和卸载。 关键词:自动堆垛式载运机器人;计算;自由度;驱动机构;搬运
Abstract This paper is using the university knowledge, automatic stacker carrying robot structure composition, working principle and main parts design must have the theoretic calculation and strength check is proposed, constructed the general guiding principle of robot automatic stacker carrying, resulting in the the automatic stacker carrying advantage for the robot is efficient, economic, and high safety factor, to improve cargo handling and assembly efficiency, reduce artificial input and so on plays a great role in the conclusion. The automatic stacking carrying robot is the working principle of traditional multi degree of freedom robot to understand, the robot is composed of a chassis, slewing mechanism, lifting mechanism, a translational mechanism, gripper and a driving mechanism. The robot can achieve multiple degrees of freedom, which can be from various angles to handling and unloading of goods. Keywords: automatic stacker robot;carrying calculate;the degrees of freedom;drive mechanism for handling
摘要:提出4个与高效岸桥相匹配的高效集装箱码头装卸工艺方案,并进行初步比较。认为:全自动装卸工艺系统将成为现代集装箱码头的重要发展方向。 关键词:高效;装卸工艺;岸桥 随着集装箱船舶的不断大型化,大型集装箱船舶择港停靠,对港口的要求已不仅是航道水深和较好的服务条件,更重要的是具有高效快捷便利的装卸工艺系统和较短的在港停留时间。如一艘8 000~10 000 TEU的超巴拿马集装箱船,希望港口在10 h之内完成3 000 TEU的装卸船效率,否则是不经济的[1]。为了适应这种需求出现了双小车岸桥、双40英尺岸桥和双40英尺双小车岸桥等高效岸桥。集装箱码头装卸作业是个系统工程,仅仅是装卸船效率的提高还远远不够,如何使与高效岸桥相关的水平运输、堆场作业及堆场管理等环节合理配置,实现装卸系统高效化,是集装箱码头装卸工艺设计所追求的主要技术指标。 l 双40英尺和双40英尺双小车岸桥的主要技术特征 一代代超巴拿马型集装箱船舶的出现,对装卸设备的效率提出了新的挑战。为满足快装快卸的要求,出现了双40英尺和双40英尺双小车岸桥。 1.1 双40英尺岸桥 如图1所示,双40英尺岸桥的特点是吊具下可同时起吊2个40英尺或4个20英尺集装箱。普通集装箱岸桥一次只能吊1个40英尺箱或2个20英尺箱。理论计算这种新型的双40英尺岸桥单台装卸效率比普通集装箱岸桥高50%以上[2]。 双40英尺岸桥具有2套独立的起升系统以适应一次装卸2个40英尺集装箱。或装卸4个20英尺集装箱,也可以起吊2个质量达65 t的20英尺集装箱。 上海振华港口机械(集团)股份有限公司研制成功的双40英尺岸桥,其双吊具下的起重量为80 t,单吊具下的起重量为65 t,满载起升速度为90 m/s,小车运行速度240 m/s,起升高度43 m,外伸距大于61 m,轨距30~35 m。自2005年首台在上海港外高桥五期工程成功应用以来已得到世界各个大型集装箱港口的认可并广泛使用。 图1 双40英尺岸桥 1.2 双40英尺双小车岸桥 如图2所示,双40英尺双小车岸桥是继双小车岸桥和双40英尺岸桥之后。为迎接航运界进人超巴拿马时代快速装卸的又一产物。双40英尺双小车岸桥是综合了双40英尺岸桥和双小车岸桥的优点,同时克服了二者的不足,在此基础上开发出来的超大型新型集装箱岸桥。理论上这种新型岸桥装卸效率可达90~100自然箱/h[3]。
《机器人技术及应用》综合习题 一、判断 1.机器人是在科研或工业生产中用来代替人工作的机械装置。(对) 2. 19世纪60年代和20世纪70年代是机器人发展最快、最好的时期,这期间的各项研究发明有效地推动了机器人技术的发展和推广。(错) 3. 对于机器人如何分类,国际上没有制定统一的标准,有的按负载量分,有的按控制方式分,有的按自由度分,有的按结构分,有的按应用领域分。(对) 4. 所谓特种机器人就是面向工业领域的多关节机械手或多自由度机器人。(错) 5. 机器人机械本体结构的动作是依靠关节机器人的关节驱动,而大多数机器人是基于开环控制原理进行的。(错) 6. 机器人各关节伺服驱动的指令值由主计算机计算后,在各采样周期给出,由主计算机根据示教点参考坐标的空间位置、方位及速度,通过运动学逆运算把数据转变为关节的指令值。(对) 7. 为了与周边系统及相应操作进行联系与应答,机器人还应有各种通信接口和人机通信装置。(对) 8. 轮式机器人对于沟壑、台阶等障碍的通过能力较高。(错) 9. 为提高轮式移动机器人的移动能力,研究者设计出了可实现原地转的全向轮。(对) 10. 履带式机器人是在轮式机器人的基础上发展起来的,是一类具有良好越障能力的移动机构,对于野外环境中的复杂地形具有很强的适应能力。(对) 11. 腿式(也称步行或者足式)机构的研究最早可以追溯到中国春秋时期鲁班设计的木车马。(对) 12. 机器人定义的标准是统一的,不同国家、不同领域的学者给出的机器人定义都是相同的。(错) 13. 球形机器人是一种具有球形或近似球形的外壳,通过其内部的驱动装置实现整体滚动的特殊移动机器人。(对) 14. 可编程机器人可以根据操作员所编的程序,完成一些简单的重复性操作,目前在工业界已不再应用。(错) 15. 感知机器人,即自适应机器人,它是在第一代机器人的基础上发展起来的,具有不同程度的“感知”能力。(对) 16. 第三阶段机器人将具有识别、推理、规划和学习等智能机制,它可以把感知和行动智能化结合起来,称之为智能机器人。(对) 17. 工业机器人的最早研究可追溯到第一次大战后不久。(错) 18. 20世纪50年代中期,机械手中的液压装置被机械耦合所取代,如通用电气公司的“巧手人”机器人。(错) 19. 一般认为Unimate和Versatran机器人是世界上最早的工业机器人。(对) 20. 1979年Unimation公司推出了PUMA系列工业机器人,它是全电动驱动、关节式结构、多中央处理器二级微机控制,可配置视觉感受器、具有触觉的力感受器,是技术较为先进的机器人。(对) 1. 刚体的自由度是指刚体具有独立运动的数目。(对) 2. 机构自由度只取决于活动的构件数目。(错) 3. 活动构件的自由度总数减去运动副引入的约束总数就是该机构的自由度。(对) 4. 机器人运动方程的正运动学是给定机器人几何参数和关节变量,求末端执行器相对于参考坐标系的位置和姿态。(对) 5. 机器人运动方程的逆运动学是给定机器人连杆几何参数和末端执行器相对于参考坐标系的位姿,求机器人实现此位姿的关节变量。(对) 6. 机械臂是由一系列通过关节连接起来的连杆构成。(对) 7. 对于机械臂的设计方法主要包括为2点,即机构部分的设计和内部传感器与外部传感器的设计。(错) 8. 球面坐标型机械臂主要由一个旋转关节和一个移动关节构成,旋转关节与基座相连,移动关节与末端执行器连接。(对) 9. 为提高轮式移动机器人的移动能力,研究者设计出了可实现原地转的全向轮。(对) 10. 履带式机器人是在轮式机器人的基础上发展起来的,是一类具有良好越障能力的移动机构,对于野外环境中的复杂地形具有很强的适应能力。(对) 11. 腿式(也称步行或者足式)机构的研究最早可以追溯到中国春秋时期鲁班设计的木车马。(对) 12. 刚体在空间中只有4个独立运动。(错) 13. 球形机器人是一种具有球形或近似球形的外壳,通过其内部的驱动装置实现整体滚动的特殊移动机器人。(对) 14. 在机构中,每一构件都以一定的方式与其他构件相互连接,这种由两个构件直接接触的可动连接称为运动副。(错) 15. 运动副可以根据其引入约束的数目进行分类,引入一个约束的运动副称为二级副。(错) 16.通过面接触而构成的运动副,称为低副;通过点或线接触而构成的运动副称为高副。(对) 17. 两个构件之间只做相对转动的运动副称为移动副。(错) 18. 构成运动副的两个构件之间的相对运动若是平面运动则称为平面运动副,若为空间运动则称为空间运动副。(对) 19. 在平面机构中,每个构件只有3个自由度。每个平面低副(转动副和移动副)提供1个约束,每个平面高副提供2
码垛机器人:大力小金刚托举新希望 码垛,是一个自动化物流控制中耗费大量人力的环节。随着行业的升级和企业自动化程度的提高,越来越多的机器人产品已经开始代替人工成为这个码垛作业的生力军。而具有高性能和高品质的工业机器人则成为了企业提高生产效率以及提升产品竞争优势的首选。 大力抓手走进新希望 在宽大的车间里,从高高的生产线上滚滚而来的饲料包被迅速而有序地按照3横2 竖8层的统一规格分装到一个个货盘上,被铲车推到不同的货位。整个环节有条不紊,精准而流畅。这个场景是新希望六和股份有限公司旗下的山东高唐六合荣达饲料有限公司的码垛生产线的日常工作状态,在而这条自动化生产线的主角与核心,是一台左右开弓、上下挥舞的工业机器人,这台橙色的大力抓手来自世界知名的工业机器人品牌-KUKA(库卡)。 随着生产力的发展,在企业生产过程实现自动化之后,产品的物流控制也需要实现配套升级。工业机器人凭借其自身显著的优势走进了企业,而优质品牌的机器人产品则可以发挥更大的优势。据新希望相关负责人介绍,荣达饲料有限公司使用的KUKA(库卡)KR120 R3200 PA (KR QUANTEC)货盘堆垛机器人与同类产品相比,具有更快、更稳定、更精准的特点。因其结构设计巧妙,优异的机械刚性和加速动惯性能,此款机器人可以完美地配合堆垛作业的要求,能把120 kg的重物轻而易举的按照既定的垛型,堆垛到设定的高度,其作用范围达3200 mm。特别值得一提的是,这台机器人每小时可分装40kg/包的饲料达1300包。在国内该分装速度与同类机器人相比,算是名列前茅。另外,在机器人和人力的效率上,新希望六合公司的负责人还表示,库卡机器人一年的工作量可达24万吨,这样的工作量即使工人连续不停的工作也未必能超过。如果用机器人一年的工作量所产生的经济效益与人力陈本来算的话,短短几年内就可以收回成本。可以说,这个大力的码垛抓手托举了企业的产品,更助推了新希望的发展。
《工业机器人技术与应用》试卷(A ) 一、填空(每空1分,共30分) 1.按照机器人的技术发展水平,可以将工业机器人分为三代 ___ _ ___ 机器 人、 ____ __ _ 机器人和 ___ ____ 机器人。 2.机器人行业所说的四巨头是__________ 、 __________ 、 __________ 、__________。 3.机器人常用的驱动方式主要有_____ _ ____、 ____ __和______ ____ 三种基本类型。 4.一般来说,机器人运动轴按其功能可划分为 __ ____ 、 _ 和工装轴,________ 和工装轴统称 _______。 5.从结构形式上看,搬运机器人可分为 __________ 、 __________ 、 __________ 、 __________ 和关节式搬运机器人。 6.码垛机器人工作站按进出物料方式可分为 __ ___ 、 _____ __ 、___ __ __ 和四进四出等形式。 7.装配机器人常见的末端执行器主要有__ ___ 、 _____ __ 、___ __ __ 和 。 8.弧焊系统是完成弧焊作业的核心装备,主要由 、送丝机、 和气瓶等组成。 9.目前工业生产应用中较为普遍的涂装机器人按照手腕构型分主要有两种: 涂装机器人和 涂装机器人,其中 手腕机器人更适合用于涂装作业。 二、判断(每题2分,共20分) ( )1.涂装机器人的工具中心点( TCP )通常设在喷枪的末端中心处。 ( )2.一个完整的点焊机器人系统由操作机、控制系统和点焊焊接系统几部分组 成。 ( )3. 工业机器人是一种能自动控制,可重复编程,多功能、多自由度的操作机。 ( )4.工业机器人的腕部传动多采用 RV 减速器,臂部则采用谐波减速器。 ( )5.在直角坐标系下,机器人各轴可实现单独正向或反向运动。 ( )6.当机器人发生故障需要进入安全围栏进行维修时,需要在安全围栏外配备 安全监督人员以便在机器人异常运转时能够迅速按下紧急停止按钮。 ( )7.示教时,为爱护示教器,最好戴上手套。 ( )8.机器人示教时,对于有规律的轨迹,原则上仅需示教几个关键点。 ( )9.离线编程是工业机器人目前普遍采用的编程方式。 ( )10.根据车间场地面积,在有利于提高生产节拍的前提下,搬运机器 人工作站可采用 L 型、环状、“品”字、“一”字等布局。 三、选择(每题2分,共20分) 1.通常所说的焊接机器人主要指的是( )。 ①点焊机器人;②弧焊机器人;③等离子焊接机器人;④激光焊接机器人 A. ①② B. ①②④ C. ①③ D. ①②③④ 2.工业机器人一般具有的基本特征是( )。 ①拟人性;②特定的机械机构;③不同程度的智能;④独立性;⑤通用性 A. ①②③④ B. ①②③⑤ C. ①③④⑤ D. ②③④⑤ 3.按基本动作机构,工业机器人通常可分为( )。 ①直角坐标机器人;②柱面坐标机器人;③球面坐标机器人;④关节型机器人 A. ①② B. ①②③ C. ①③ D. ①②③④ 4.操作机是工业机器人的机械主体,是用于完成各种作业的执行机构。它主要哪由几部分组成( ) ①机械臂;②驱动装置;③传动单元;④内部传感器 A. ①② B. ①②③ C. ①③ D. ①②③④ 5.工业机器人常见的坐标系有( )。 ①关节坐标系;②直角坐标系;③工具坐标系;④用户坐标系 A. ①② B. ①②③ C. ①③④ D. ①②③④ 6.对工业机器人进行作业编程,主要内容包含( )。 ①运动轨迹;②作业条件;③作业顺序;④插补方式 A. ①② B. ①②③ C. ①③ D. ①②③④ 7.依据压力差不同,可将气吸附分为( )。 ①真空吸盘吸附 ②气流负压气吸附 ③挤压排气负压气吸附 A. ①② B. ①③ C. ②③ D. ①②③ 8.搬运机器人作业编程主要是完成( )的示教。 ①运动轨迹 ②作业条件 ③作业顺序 A. ①② B. ①③ C. ②③ D. ①②③ 9.涂装条件的设定一般包括( )。 ①涂装流量;②雾化气压;③喷幅(调扇幅)气压;④静电电压;⑤颜色设置表 A. ①②⑤ B. ①②③⑤ C. ①③ D. ①②③④⑤ 班级 姓名 学号 ---------------------------------------------密-------------------------------------封---------------------------------线----------------------------------------- -封
编号:CZ-GC-07823 ( 操作规程) 单位:_____________________ 审批:_____________________ 日期:_____________________ WORD文档/ A4打印/ 可编辑 易燃液体装卸管理人员安全操 作规程 Safety operation procedures for flammable liquid handling management personnel
易燃液体装卸管理人员安全操作规 程 操作备注:安全操作规程是要求员工在日常工作中必须遵照执行的一种保证安全的规定程序。忽视操作规程 在生产工作中的重要作用,就有可能导致出现各类安全事故,给公司和员工带来经济损失和人身伤害,严重 的会危及生命安全,造成终身无法弥补遗憾。 一、易燃液体槽车卸入灌操作规程: 1、槽车对位后,车号是否相同,检查50米周围是否有明火源,距离可燃物、行人15米以上。 2、关闭手机,禁带火种,禁穿带钉鞋,禁穿化纤衣裤,禁戴老花镜,禁用非防爆电筒,禁用塑料盆、勺、桶。禁拖电缆和电缆裸露。 3、每班操作工要三人以上,其中甲级工不得少于两人,现场有一名兼岗安全员。 4、现场十米以内配备四个干粉灭火器,二床石棉被。 5、检查汽车槽车、槽罐内部、电源插座、电机、泵、管、电缆、扳手是否符合安全和防爆要求,戴防火罩,如不符合,整改合格后
才能使用。 6、接好泵的电源和汽车槽车接地线,使静电导入地下。 7、检查火车槽车罐口铅封是否良好,如被破坏,要报告安全领导同意后才能卸车。 8、轻开槽车罐口、注意罐内气压掀盖伤人,不准在罐口处猛烈敲打,测量并记录罐内液面高度,当日温度、车号、罐体标出容量计表页数作计量备查。 9、汽车停放在容易撤离和逃生的方位,司机不离车。 10、接好火车槽车和汽车槽车的管后,开启前,安全员再检查周围现场各个环节,确认无安全隐患后,才开机。开机后要做到听(有无异样响声)、摸(电机温度)、看(有无溢漏)、查(找原因修复整改)。 11、汽车槽车上要有一人在上风方向监视罐装情况,罐内必须留出空间,达到安全液面,示意关机。 12、槽车卸完四分之三时,应将管头移放到罐底中间的凹坑处,并用扫槽扫刮液体向凹坑汇集,关小开关,慢慢吸入,彻底卸干后
大学 机 器 人 技 术 及 应 用 结 课 论 文
智能引领未来 摘要: 智能引领未来,机器人能力将远胜人类,这不是梦想;未来的机器人也能自主的学习和思考,工作能力将远远超过人类,能承担大量人类所不能及的工作,进一步推动智能科学的发展,促进社会的进步,促进经济的高速增长,而实现智能化必须依靠强有力的硬件系统,就机器人而言,其身上集成了多种处理器、存储器与大量的传感器,设想,当这些器件不断地走向高端化、微型化、进一步集成化,那么机器人的处理速度将进一步提高,质量与体积将大大减小,机器人将越来越”聪明“。 关键词: 机器人、智能、硬件系统、高端化、集成化、微型化、聪明。 引言: 现在的机器人与人类比较起来,机器人不能自主学习与自主思考,缺乏情感,必须需要接收人的命令才能执行相关命令,或者事先就把各种命令存储到机器人的大脑中,有需要的时候就执行命令。随着集成电路的飞速发展,处理器、存储器、传感器等电子元件的高端化、微型化、集成化,机器人的处理速度将大大提高,质量与体积将大大减轻,机器人会变得越来越”聪明“。 集成电路前景优越 芯片即集成电路产业是国民经济和社会发展的战略性、基础性、先导性产业,在计算机、消费类电子、网络通信、汽车电子等几大领域起着关键作用,是全球主要国家或地区抢占的战略制高点,尤其是发达国家在这一领域投入了大量创新资源,竞争日趋激烈。 随着技术的不断进步,新的元件结构和材料上的变革都将对机器人的发展战略起到决定作用。在晶圆代工产业,14nm/16nm的FinFET器件已取得了一定的发展。拥有较低泄漏率和更高速度的低功率晶体管备受瞩目。3DNAND使平面NAND 降到20nm以下,创造出外形更小巧、位密度更高的产品。 为了改进3D设备的性能,未来的逻辑芯片和晶圆代工设备的解决方案需要采用选择性外延与高k金属栅电极材料加工工艺,以提高晶体管的速度,降低泄漏率。低功耗、高性能的晶体管则能丰富移动设备的功能,同时延长电池寿命, 3DNAND需要HAR蚀刻、阶梯绘图、多层堆叠沉积和高选择性硬模等技术的支持,从而在小巧的外形空间内实现高密度存储,这对智能化设备,如对机器人来说简直就是如虎添翼啊! 随着LED产业发展越来越趋于健康和理性,LED领域设备需求也更多来自于新工艺、新技术的驱动,而非简单生产规模的扩张,比如倒装芯片与高压芯片被认为是目前最具有发展前景的LED芯片技术,而这两种技术也带动了深槽刻蚀设备和金属反射层镀膜设备等新设备、新工艺的需求。除此之外,还有AlN镀膜设备、高亮度红黄光芯片刻蚀设备等设备的需求。 集成电路引导未来生活 一张0.5毫米厚的世博会门票,其“真实面目”是个集成电路产品。门票里装了RFID芯片,当门票靠近读卡机时,门票上的线圈会感应出电流,电流便驱
装卸管理人员安全生产操作规程 1 、装卸管理人员应了解所运载的危险货物性质、危害特性、包装容器的使用特性、防护要求和发生事故的应急措施。 2 、装卸过程中,驾驶人员和押运人员不得离开车辆并负责监装、监卸,办理货物交接签证手续时要点收、点交。 3 、车辆进入危险货物装卸作业区,应带防火罩,按作业有关安全规定驶入装卸作业区,并将车辆摆在容易驶离作业现场的方位上。 4 、车辆停靠货垛时,应听从作业区指挥人员的指挥,车辆与货垛之间要留有安全距离;待装、待卸车辆与正在装卸货物的车辆应保持足够的安全距离,并不准堵塞安全通道。 5 、作业前,应核对货物名称、规格、数量是否与托运单证相符,并认真检查货物包装是否破损及货物包装的完整状况。货物与运单不符或包装不符合有关规定的应拒绝装车。 6 、装卸操作时应根据货物包装的类型、体积、重量、件数的情况,并根据《包装储运图示标志》的要求,谨慎操作。 7 、装卸危险货物应符合交通部、公安部、国家发展和改革委员发出《关于进一步加强车辆超限超载集中治理工作的通知》中规定的认定标准,不得超载装运。 8 、装卸过程中,车辆发动机应熄火,并切断总电源。在有坡度的场地装卸货物时,必须采取纺织车辆溜坡的有效措施。 9 、装卸作业场所要远离热源,严禁受热,通风良好;场所内电气设备应符合规定要求,严禁使用明火灯具照明,照明灯应具有防爆性能;要有防静电和避雷装置。
10 、危险货物装卸完毕,作业场所必须彻底清扫干净,装过刷毒品的车辆和受到危险污染的车辆、工具必须洗刷和除污。货物的撒漏和受到危险货物污染的污染物必须送到当地环保部门指定地点集中处理。 11 、禁止在装卸作业区内维修车辆。
堆垛机器人开题报告 篇一:物流堆垛机器人设计-开题报告 毕业设计(论文)开题报告 1 选题背景及其意义 随着机器人技术的发展,直角坐标机器人技术在物流堆垛上的使用越来越多。直角坐标机器人作为执行机构,具用控制方便,执行动作灵活,可以实现复杂的空间轨迹控制。直角坐标机器人是工业机器人的一种,它已经广泛的应用于自动化生产中,它具有结构简单,运动直观性强,坐标方向位置精度容易控制,漂浮物精度较高;制造安装高速方便,容易实现数字控制。 机器人的使用量增长的主要原因是价格不断降低。在20世纪90年代的十年间,机器人价格降低而劳动力成本增加。机器人不仅越来越便宜,而且它们在工业领域变得更加有效——速度更快、操作更准确、更富有柔性。如果在成本统计中将质量因素考虑在内,应用机器人的成本将比它的实际下降快得多。由于机器人作业变得愈加有效,而劳动力成本不断升高,因此工业中越来越多的作业更适合于应用机器人自动化,这是工业推动机器人发展的主要因素。其次是非经济因素造成的,随着机器人作业能力的增强,它们可以完成更加危险或不可能完成的工作。机器人的使用不仅提高生产了
生产效率而且增强了工作范围。 在许多领域中用到机器人搬运,如在汽车制造、食品包装、化学医药、电子器件等。而直角坐标机器人在码垛机和搬运机使用越来越多,其特点是负载范围大,小到几公斤,大到几吨;运行速度快,且速度可调整;动作灵活,可完成复杂的任务;可靠性高,维护简单。 2 文献综述(国内外研究现状与发展趋势) 2.1 我国物流机器人发展的基本概况 首先介绍一下工业机器人的由来,工业机器人诞生于20世纪60年代,在20世纪90年代得到迅速发展,是最先产业化的机器人技术。它是综合了计算机、控制论、机构学、信息和传感技术、人工智能、仿生学等多学科而形成的高新技术,是当代研究十分活跃、应用日益广泛的领域。它的出现是为了适应制造业规模化生产,解决单调重复的体力劳动和提高生产质量而代替人工作业。在我国,工业机器人的真正使用到现在已经20多年了,已经基本实现了试验,引进到自主开发的转变,促进了我国制造业、勘探业等行业的发展,随着我国改革开放的逐渐深入,国内的工业机器人产业将面对越来越大的竞争与冲击,因此,掌握国内工业机器人市场的实际情况,把握我国工业机器人的相关技术与研究进度显得十分重要。
《工业机器人技术与应用》试卷 (A ) 一、填空(每空1分,共30分) 1.按照机器人的技术发展水平,可以将工业机器人分为三代 ___ _ ___ 机器 人、 ____ __ _ 机器人和 ___ ____ 机器人。 2.机器人行业所说的四巨头是__________ 、 __________ 、 __________ 、__________。 3.机器人常用的驱动方式主要有_____ _ ____、 ____ __和______ ____ 三种基本类型。 4.一般来说,机器人运动轴按其功能 可划分为 __ ____ 、 _ 和工装轴,________ 和工装轴统称 _______。 5.从结构形式上看,搬运机器人可分为 __________ 、 __________ 、 __________ 、 __________ 和关节式搬运机器人。 6.码垛机器人工作站按进出物料方式可 分为 __ ___ 、 _____ __ 、___ __ __ 和四进四出等形 式。 7.装配机器人常见的末端执行器主要有__ ___ 、 _____ __ 、___ __ __ 和 。 8.弧焊系统是完成弧焊作业的核心装 备,主要由 、送丝机、 和气瓶等组成。 9.目前工业生产应用中较为普遍的涂装 机器人按照手腕构型分主要有两种: 涂 装 机 器 人 和 涂装机器人,其中 手腕机器人更适合用于涂装作业。 二、判断(每题2分,共20分) ( )1.涂装机器人的工具中心点 ( TCP )通常设在喷枪的末端中心处。 ( )2.一个完整的点焊机器人系统 由操作机、控制系统和点焊焊接系统几部分组成。 ( )3. 工业机器人是一种能自动控制,可重复编程,多功能、多自由度的操作机。 ( )4.工业机器人的腕部传动多采 用 RV 减速器,臂部则采用谐波减速器。 班级 姓名 学号
工业机器人是面向工业领域的多关节机械手或多自由度的机器人,是自动执行工作的机器装置,靠自身动力和控制能力来实现各种功能的一种机器。它可以受人类指挥,也可以按照预先编排的程序运行,还可以根据人工智能技术制定的原则行动。 微小网的网友不但分享了大量solidworks、autocad、catia、ug等设计的工业机器人,也有很多高达等玩具机器人。以下整理一些优秀机器人设计模型,全部为免费下载。 1. 履带行走监控机器人 履带行走监控机器人也是比较流行的DIY电子产品之一。分享一个catia设计的履带行走监控机器人3D模型,有零件图和装配图。通常履带行走监控机器人是通过WIFI模块进行数据传输和远程控制。 免费下载 设计师评论:机器人的难点在于履带的绘制和履带的装配。如果能将动画效果图传上去,就更加完美了。 2. ABB IRB 360机器人 一款ABB IRB 360机器人的3D模型,有igs等格式的图纸,分享一下。它既可以接受人类指挥,又可以运行预先编排的程序,也可以根据以人工智能技术制定的原则纲领行动。它的任务是协助或取代人类工作的工作,例如生产业、建筑业,或是危险的工作。 免费下载
设计师评论: 刚下载了,不错,以前在展会上看过法拉克的一款机器人,和这个差不多。 3. 发那科R-OiA多功能智能六轴机器人
法那科机器人R-OiA的3D模型,IGES格式的图纸。发那科R-OiA多功能智能六轴机器人可以实现弧焊、点焊、激光焊、搬运、上下料、激光切割等多种工业用途。 免费下载 4. 保险杠机器人 分享一个solidworks设计的保险杠机器人3D模型。保险杠机器人是工厂中用来生产保险杠的机器人。 免费下载
装卸管理人员安全操作规程 1. 严格遵守易燃易爆及危险化学物品装卸运输的有关规定。装卸分散材料及有毒气散发的物品 , 应佩戴适用的防护用品。 2. 工作前应认真检查所用工具是否完好可靠 , 不准超负荷使用。 3. 装卸时应做到轻装轻放 , 重不压轻 , 大不压小 , 堆放平稳 ,捆扎牢固。 4. 人工搬运、装卸物件应视物件轻重配备人员。抬杠、撬棍、跳板、绳索等工具必须完好可靠。多人搬运同一物件时 , 要有专人指挥 , 并保持一定间隔 , 一律顺肩 , 步调一致。 5. 堆放物件不可歪斜 , 高度要适当 , 对易滑动件要用木块垫塞 , 不准将物件堆放在安全道内。 6. 用机动车辆装运货物时 , 不得超载、超高、超长、超宽。如遇必须超高、超宽、超长装运时 ,应按交通安全管理规定 , 要有可靠措施和明显标志。 7. 装车时 , 随车人员要注意站立位置 , 车辆行驶时 , 不准站在物件和前拦板之间。车未停妥不准上下。 8. 装卸货物应挂规定吊点 , 起吊装箱件时应先检查箱体底脚是否牢固完好 , 按吊线标志吊挂 , 并经试吊确认稳
妥后方可起吊。 9. 使用卷扬机、钢管滚动滑移货物时 , 要有专人指挥 , 路面要坚实平整 , 绳索套结要找准重心 , 保持直线行进 , 有棱角快口部位应设垫衬 , 卸车或下坡应加保险绳 , 货物前后牵引钢丝绳边不准站人。 10. 装卸时 , 应根据吊位变化 , 注意站立位置 , 严禁站在吊物下面。 11. 铁路车辆装运物件 , 不得超过车厢允许高度和宽度。铁路两侧 1.5m 以内 , 不得堆放装卸物件 , 不准在车厢底下或顶上休息。 12. 在高拦板车厢装卸货物起重驾驶员无法看清车厢内的指挥信号时 , 应设中间指挥 , 正确传递信号 , 或采用步话机。 13. 装运易燃易爆危险化学品严禁与其他货物混装 , 要轻搬轻放 , 搬运场地不准吸烟 , 车厢内不准坐人。 14. 危险化学品、剧毒品装卸必须注意防毒及交接数量。 15. 机械装卸注意配合操作 , 防止人身伤亡事故发生。