
第二章 连续系统的时域分析
一、单项选择题
X2.1(东南大学2002年考研题)一线性时不变连续时间系统,其在某激励信号作用下的自由响应为(e -3t +e -t )ε(t ),强迫响应为(1-e -2t )ε(t ),则下面的说法正确的是 。。
(A )该系统一定是二阶系统 (B )该系统一定是稳定系统
(C )零输入响应中一定包含(e -3t +e -t )ε(t ) (D )零状态响应中一定包含(1-e -2t )ε(t )
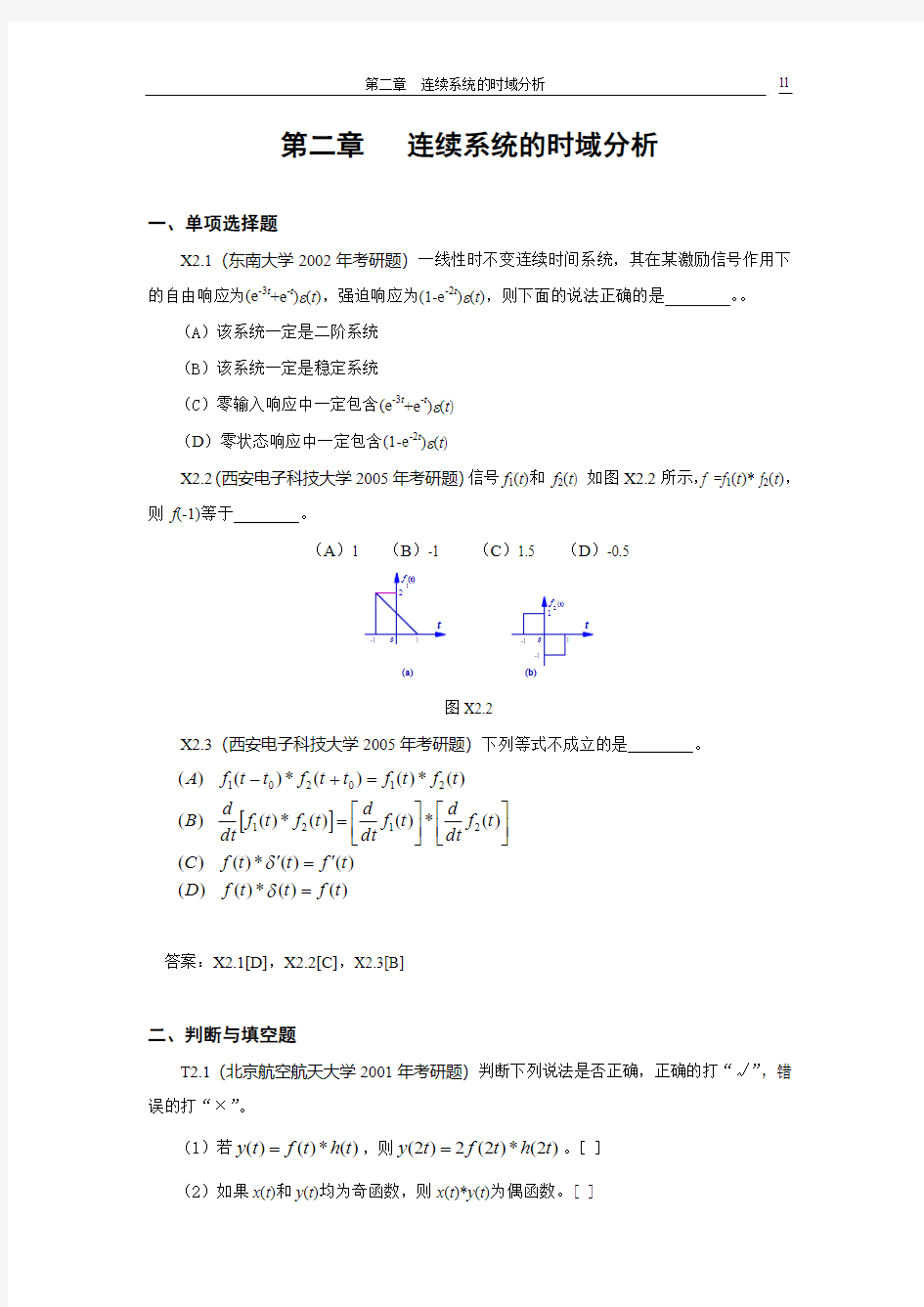
X2.2(西安电子科技大学2005年考研题)信号f 1(t )和 f 2(t ) 如图X2.2所示,f =f 1(t )* f 2(t ),则 f (-1)等于 。
(A )1 (B )-1 (C )1.5 (D )-0.5
图X2.2
X2.3(西安电子科技大学2005年考研题)下列等式不成立的是 。
[])
()(*)()
()()(*)()()(*)()(*)()()(*)()(*)()(2121210201t f t t f D t f t t f C t f dt d t f dt d t f t f dt d B t f t f t t f t t f A ='='????????????==+-δδ
答案:X2.1[D],X2.2[C],X2.3[B]
二、判断与填空题
T2.1(北京航空航天大学2001年考研题)判断下列说法是否正确,正确的打“√”,错误的打“×”。
(1)若)(*)()(t h t f t y =,则)2(*)2(2)2(t h t f t y =。[ ] (2)如果x (t )和y (t )均为奇函数,则x (t )*y (t )为偶函数。[ ]
(3)卷积的方法只适用于线性时不变系统的分析。[ ] (4)若)(*)()(t h t f t y =,则)(*)()(t h t f t y --=-。[ ]
(5)两个LTI 系统级联,其总的输入输出关系与它们在级联中的次序没有关系。[ ] T2.2(华中科技大学2004年考研题)判断下列叙述或公式的正误,正确的在方括号中打“√”,错误的在方括号中打“×”。
(1)线性常系数微分方程表示的系统,其输出响应是由微分方程的特解和齐次解组成,或由零输入响应和零状态响应所组成。齐次解称之为自由响应[ ],特解称之为强迫响应[ ];零输入响应称之为自由响应[ ],零状态响应称之为强迫响应[ ]。
(2)(上海交通大学2000年考研题)
]
[)
(*)()(]
[1)(]
[)0()()(]
[)()(*)(?
?
∞
-∞-====t
t
t t f d f d f t t f t f t t f εττττδδδ
T2.3在下列各题的横线上填上适当的内容: (1)(北京邮电大学2000年考研题)[]
=-)(*2t e dt
d t
ε (2)(国防科技大学2001年考研题)
?
∞
-=t
t f d f *
)()(ττ
T2.4(华南理工大学2004年考研题)一连续LTI 系统的单位阶跃响应)()(3t e t g t
ε-=,
则该系统的单位冲激响应为h (t )= 。
T2.5(华南理工大学2004年考研题)已知信号h (t )=ε(t -1)-ε(t -2),f (t )=ε(t -2)-ε(t -4),则卷积=
)(*)(t h t f 。
T2.6(南京理工大学2000年考研题)某系统如图T2.6所示,若输入
∑∞
=-=0
)()(n nT t t f δ,则系统的零状态响应为 。
图T2.6
T2.7(北京交通大学2004年考研题)对连续信号延迟t 0的延时器的单位阶冲激应为 ,积分器的单位阶冲激应为 ,微分器的单位阶冲激应为 。
答案:
T2.1 (1)√ (2)√ (3)√ (4)√ (5)√ T2.2 (1)√,√,×,× (2)√,×,×,√ T2.3 (1)e -2t (2)ε(t ) T2.4 h (t )=δ(t)-3e -3t ε(t )
T2.5 h (t )*f (t )= (t -3)ε(t -3) - (t -4) ε(t -4) - (t -5)ε(t -5) + (t -6)ε(t -6) T2.6 ε(t )
T2.7 δ(t-t 0), ε(t ) ,)(t δ'
三、画图、证明与分析计算题
J2.1(东南大学2001年考研题)已知某线性系统可以用以下微分方程描述
)(5)(9)(5)(6)(t f t f t y t y t y +'=+'+''
系统的激励为f (t )=ε(t ),在t =0和t =1时刻测量得到系统的输出为y (0)=0,y (1)=1-e -5。
(1)求系统在激励下的全响应,并指出响应中的自由响应、强迫响应、零输入响应、零状态响应分量;
(2)画出系统模拟框图。
解:(1)先求系统的冲激响应)(t h 。)(t h 应满足以下微分方程:
()()
)
()()(5
,1:056::)()21.2J ()
31.2J ()
(5)(9)()21.2J ()
()(5)(6)(:
)()
11.2J ()
(5)(9)(5)(6)(521211************t e A e A t e A e A t h t h t h t h t h t t h t h t h t h t t t h t h t h t t t t εελλλλδδδλλ--+=+=-=-==++--+'=-=+'+''-+'=+'+''则
特征根特征方程求由式则
满足微分方程设
:
1)0(0)0(01)0(,0~0)21.2J (0)0()0(,0)(,)()(;0)0()0(,0)(,)()(:)21.2J (211111*********、A A h ,h 。h t 。h h t t h t t h h h t t h t t h 。、A A 确定系数初始值利用可得内积分微分方程在对式即处连续在则项中不含即处不连续在则项中应包含微分方程可知由式下面求系数='=='=-==='='≠'='''-+++++--+-+δδ
()
()
()
(
)(
)()()5
11
50
550
5555121211
21121)
(21)1(0
)(21)0(:
)
(21)(10)(10)()(*)()()
(10)()31.2J ()
(25.0)(25
.025.015)(0
)0(--=--=------∞
+∞-------+-+=-+==-+=-+=?-=-?-==-=--=??
?-==???
?=--='=+=??e e t e e
y t e e y t e e t d e e d e e t t h t f t y t e e t h t e e t h A A A A t h A A h t t
t
zs
t t t zs t
t t
zs t t t t εεεεττ
τετεεεττττ由此可得则零状态响应为
可得
代入式故
()
()
)
()(1
1
0121)1()1()1(0)0()0()0()1()0(:
)
()(0
)(5)(6)(:
)()(521512511215512511212
5112
121521t e e t y B B e
e B e B e B B e e e B e B e y y y B B y y y B e B e y B B y 、B B t e B e B t y t y t y t y t ,y t y t t zi zs zi zs zi zi zi t t zi zi zi zi zi zi εε----------------=?????=-=?
????
?+-=+=+??????-=-+++=+==+=+=?????+=+=+==+'+''故
下面求系数则
应满足以下微分方程应下面求系统的零输入响
1
)(),
()(:
)()()
()1()()()(55=-=-=+=--t y t e t y t y 、t y ,t e t y t y t y p t h p h t zs zi εε分别为强迫响应自由响应由上式可知则系统的全响应为
(2)系统框图如下:
图J2.1-1
J2.2(上海大学2000年考研题)某线性时不变系统的单位阶跃响应为
()
)(13)(2t e t g t ε-=-
用时域解法求:
(1)系统的冲激响应h (t );
(2)系统对激励)()(1t t t f ε=的零状态响应y zs1(t );
(3)系统对激励[])1()()(2--=t t t t f εε的零状态响应y zs2(t ). 解:)(6)(2)
()()1(2t e t dt
t dg t h t εδ--==
[]
()
[]()
[]
[][][]
[][][]()[]
)
1(5.15.1)(5.15.1)
1()1()()1(},0{)1()1(},0{)(},0{)(},0{)()
1(13)1()1()1(5.15.2)
1(5.1)1(5.1)1()1()1()
(5.15.1)()()
1()1()1()()1()()()3()
(5.15.1)()13()
()13(*)()(*)(*)()()2()1(221122)
1(2)
1(2)1(21212222)1()1(111-+----=----=--+---+==--=-→
----=----=-→----=→-----=--=--=-=-===-----------∞----?t e t t e t t g t y t y t T t t T t t T t f T t y t e t g t t e
t t e t t y t t t e t t y t t t t t t t t t t t f t e t d e t e t t h f t h t f t y t t zs zs zs t t t zs t zs t t
t zs εεεεεεεεεεεεεεεεεεττεεετ
J2.3(重庆大学2001年考研题)已知一线性时不变系统的单位冲激响应
)(2sin 2)(t t t h εππ
??
?
??=
,输入信号f (t )的波形如图J2.3-1所示。用时域法求系统的零状态响应y zs (t ).
图J2.3-1
解:利用卷积的微积分性质,可得
)
(2cos 1)(2sin 2)()()(*)()(*)()()
1()1()1(t t d d h t h
t h t f t h t f t y t
t
zs επττετππ
ττ??? ?
?
-=??? ??====??∞-∞--- 对输入信号f (t )求一阶导数,如图J2.3-2。
图J2.3-2
[]∑∞
=----=0
)
1()46()6()(n n t n t t f
δδ
则
[]
[]
[]
)46()6(2cos )1(1)46()46(2cos 1)6()6(2cos 1)
46()6()46()6(*)()
(*)()(000)1()1(0
)
1()1()1(----?????
?
--=?
?
????--???
???-----??????--=----=----==∑∑∑∑∞
=∞
=∞
=--∞
=--n t n t t n t n t n t n t n t h n t h n t n t t h
t h t f t y n n n n n zs εεπεπεπδδ
J2.4(北京交通大学2001年考研题)已知一线性时不变系统的单位冲激响应h (t )和激励f (t )的波形如图J2.4-1(a)、(b)所示。用时域法求系统的零状态响应y zs (t ),画出y
zs (t )的波形.
图J2.4-1
解:为运算方便,分别对h (t )、f (t )分别求微分和积分,如图J2.4-2。
图J2.4-2
)
2(2)1()()()
2()2(2)(2)()()1(---+='---==?∞
--t t t t h t t t t d f t f t
δδδεεττ
)
4()4(4)3()3(2)2()2(6)1()1(2)(2)
2(2)1()()
(*)()(*)()()1()1()1()1(--+--------+=---+='==----t t t t t t t t t t t f t f t f t h t f t h t f t y zs εεεεε
y zs (t )的波形如图J2.4-3所示。
图J2.4-3
J2.5(北京邮电大学2002年考研题)已知一线性时不变系统对激励为f 1(t )=ε(t )的全响应y 1(t )=2e -t ε(t );对激励为f 2(t )=δ(t )的全响应y 2(t )=δ(t );用时域分析法求:
(1)系统的零输入响应y zi (t );
(2)系统的初始状态不变,其对激励为f 3(t )= e -t ε(t )的全响应y 3(t )。 解:(1)求系统的零输入响应y zi (t )
)
25.2J ()
()()()()15.2J ()(2)()()(2211-=+=-=+=-t t y t y t y t e t y t y t y zs zi t zs zi δε
由题设可知,y zs1(t )为阶跃响应,即y zs1(t )= g (t );y zs2(t )为冲激响应,即y zs2(t )= h (t )。则
)()()(12t h t y t y zs zs ='=
对式(J2.5-1)求一阶导数,并结合上式,可得
)
35.2J ()
(2)(2)()()
(2)(2)()()(211--=+'?
-='+'='--t e t t y t y t e t t y t y t y t zs zi t
zs zi εδεδ
由式(J2.5-2)和式(J2.5-3)可得
1
1)(1
1
121)()1()
(2)()()(+=
?
+-=
+-=-?-=-'-s s Y s s s s Y s t e t t y t y zi zi t
zi zi εδ
)
()()()()()()
()(2t e t t y t t y t h t e t y t
zi zs t zi εδδε---=-==?
=?
(2)求全响应y 3(t )
)
()2()()()()
()1()]()([*)()
(*)()(3333t e t t y t y t y t e t t e t t e t h t f t y t zs zi t t t zs εεεδε-----=+=-=-==
J2.6(北京邮电大学2003年考研题)如图J2.6-1所示系统由几个子系统组成,各子系统的冲激响应为h 1(t )=ε(t ),h 2(t )=δ(t -1),h 3(t)=-δ(t ),试求此系统的冲激响应为h (t );若以f (t )=e -t ε(t )作为激励信号,用时域卷积法求系统的零状态响应y zs (t )。
图J2.6-1
解:(1)求系统的冲激响应为h (t ):
)
1()()]([*)(*)1()()
(*)(*)()()(3121--=--+=+=t t t t t t t h t h t h t h t h εεδεδε
(2)求零状态响应y zs (t ):
[][]
)
1(1)()1()1()(*)()
(*)()()1(----=--==----t e t e t t t e t h t f t y t t t zs εεεεε
J2.7(浙江大学2004年考研题)已知f (t )和h (t )的波形如图J2.7-1(a)、(b)所示,求
f (t )*h (t )。
图J2.7-1
解:为运算方便,分别对f (t )、h (t )求积分和微分,如图J2.7-2(a)、(b)。
图J2.7-2
)
4()2(2)()(*)()(*)()
4()2(2)()()
()()()1()
1(-+--='=-+--='==???-?∞
--?
t f t f t f t h t f t h t f t t t t h t f d f t f
t
δδδττ
f (t )*h (t )的波形如图J2.7-1 (c)所示。
J2.8(北京邮电大学2002年考研题)因果性的LTI 系统,其输入输出关系可用下列微积分方程表示:
)()()()(5)
(t f d t x f t y dt
t dy --=+?∞∞-τττ
其中)(3)()(t t e t x t δε+=-,用时域分析法求此系统的冲激响应为h (t )。
解:原方程可表示为
)18.2J ()
()(*)()(5)(--=+'t f t x t f t y t y
系统的冲激响应为h (t )的微分方程为:
)
48.2J ()
()(*)()()38.2J ()()(5)()28.2J ()()(*)()(5)(1111--=-=+'--=+'t h t x t h t h t t h t h t t x t t h t h δδδ 由式(J2.8-3)可得
)()(51t e t h t ε-=
代入式(J2.8-4)
[]
)(4
7
)(41)()(3)(*)()
()(*)()(55511t e t e t e t t e t e t h t x t h t h t t t t t εεεδεε-----+=-+=-=
J2.9(华南理工大学2000年考研题)已知f (t )=e 2t ε(-t ),h (t )=ε(t-3),求y (t )=f (t )*h (t ),绘出y (t )的波形。
解:??
∞
∞
--∞
∞
----=-=
=ττετεττττd t e d t h f t h t f t y )3()()()()(*)()(2
以上积分应以下两种情形来分析,
)
3(5.0)3(5.0)()
3(5.0)3()3()()(3)2()
3(5.0)3()3()()(3)1()3(20
22)3(2322-++-=-=-?=---=>+-=+-?=---=≤-∞
--∞
∞
----∞
--∞
∞--???
?t t e t y ,t t d e d t e t y t t e t d e d t e t y t t t t εεεετττετεεετττετεττττ可得
综合以上时
时
y (t )的波形如图J2.9-1。
图J2.9-1
J2.10(中国科技大学2002年考研题)LTI 系统的输入f (t )与零状态响应y (t )之间的关系为: τττ?
∞
----=
t
t d f e t y )2()()(
(1)求系统的冲激响应为h (t );
(2)求f (t )= ε(t+1)-ε(t-2)时的零状态响应;
(3)用简便方法求图J2.10-1所示系统的响应。其中,h 1(t )= δ(t -1), h (t )为(1)中结果, f (t)与(2)中相同。
图J2.10-1
解:(1))2()2()2()()2()2()(-=-=-=
--∞
---∞
---??
t e d e d e t h t t
t t
t εττδττδτ
(2)系统在f (t )= ε(t+1)-ε(t-2)作用下的零状态响应为y zs2(t ),
[][][]
)
4(1)1(1)2(*)2()1()
(*)()()4()1()2(2-----=---+==------t e t e t e t t t h t f t y t t t zs εεεεε
(3)设图J2.10-1所示系统的冲激响应为h 0(t ),
)1()()(*)1()()(*)()()(10--=--=-=t h t h t h t t h t h t h t h t h δ
图J2.10-1所示系统的零状态响应为y zs3(t ),
[][][][]
)
5(1)4(1)2(1)1(1)
1()()]1()([*)()
(*)()()5()4()2()1(2203--+--------=--=--==--------t e t e t e t e t y t y t h t h t f t h t f t y t t t t zs zs zs εεεε
J2.11(西安电子科技大学2005年考研题)某线性时不变系统的单位阶跃响应为
)1()()(--=t t t g εε
求:(1)系统的冲激响应h (t );
(2)当激励?
--=1
5
)()(t t d t f ττδ时系统的零状态响应y zs (t ),画出y zs (t )的波形。
解:
[][])
7()5()3()1()2()(*)5()1()
(*)()()
5()1()()()()()2()2()()
()()1(5
1
1
5
-+-----=-----==---=-==--==
???-∞
--∞
---t t t t t t t t t h t f t y t t d d d t f t t dt
t dg t h zs t t t t εεεεδδεεεεττδττδττδδδ
y zs (t )的波形如图J2.11-1所示。
图J2.11-1
J2.12(西安电子科技大学2004年考研题)某LTI 系统的单位阶跃响应为)()(t e t g t
ε-=,
求当激励)(3)(2∞<<-∞=t e t f t
时系统的零状态响应y zs (t )。
解: )()()
()(t e t dt
t dg t h t εδ--==
[]
t t t zs e t e t e t h t f t y 222)()(*3)(*)()(=-==-εδ
J2.13(北京理工大学2000年考研题)如图J2.13-1 (a)所示电路系统,R 1=2k Ω,R 2=1k Ω,
C=1500μF ,输入信号如图2.13 -1(b)所示,用时域法求输出电压u c (t )。
图J2.13-1
解:由电路可得如下微分析方程:
)(1
)(111)(121
t f C R t u R R C t u c c
=???? ??++' 代入元件参数,得
)(3
1
)()(t f t u t u c c
=+' 冲激响应的微分方程为
)(3
1
)()(t t h t h δ=+'
由此可得系统的冲激响应:)(3
1
)(t e t h t ε-=
则系统的响应为
[])
3()1(3
2
)2()1(38)1()1()()1()(31*)3(2)2(8)1(3)(3)
(*)()(321--+-----+-=??
?
???-+---+==+-+-+---t e t e t e t e t e t t t t t h t f t u t t t t t c εεεεεεεεε
第三章 线性系统的时域分析法 3.1 引言 分析控制系统的第一步是建立模型,数学模型一旦建立,第二步 分析控制性能,分析有多种方法,主要有时域分析法,频域分析法,根轨迹法等。每种方法,各有千秋。均有他们的适用范围和对象。本章先讨论时域法。 实际上,控制系统的输入信号常常是不知的,而是随机的。很难用解析的方法表示。只有在一些特殊的情况下是预先知道的,可以用解析的方法或者曲线表示。例如,切削机床的自动控制的例子。 在分析和设计控制系统时,对各种控制系统性能得有评判、比较的依据。这个依据也许可以通过对这些系统加上各种输入信号比较它们对特定的输入信号的响应来建立。 许多设计准则就建立在这些信号的基础上,或者建立在系统对初始条件变化(无任何试验信号)的基础上,因为系统对典型试验信号的响应特性,与系统对实际输入信号的响应特性之间,存在着一定的关系;所以采用试验信号来评价系统性能是合理的。 3.1.1 典型试验信号 经常采用的试验输入信号: ① 实际系统的输入信号不可知性; ② 典型试验信号的响应与系统的实际响应,存在某种关系; ③ 电压试验信号是时间的简单函数,便于分析。 突然受到恒定输入作用或突然的扰动。如果控制系统的输入量是随时间逐步变化的函数,则斜坡时间函数是比较合适的。 (单位)阶跃函数(Step function ) 0,)(1≥t t 室温调节系统和水位调节系统 (单位)斜坡函数(Ramp function ) 速度 0,≥t t ∝ (单位)加速度函数(Acceleration function )抛物线 0,2 12 ≥t t (单位)脉冲函数(Impulse function ) 0,)(=t t δ 正弦函数(Simusoidal function )Asinut ,当输入作用具有周期性变化时。 通常运用阶跃函数作为典型输入作用信号,这样可在一个统一的基础上对各种控制系统的特性进行比较和研究。本章讨论系统非周期信号(Step 、Ramp 、对正弦试验信号相应,将在第五章频域分析法,第六章校正方法中讨论)作用下系统的响应。 3.1.2 动态过程和稳态过程
2020考研数学一试卷分析 随着考研数学考试的结束,2020考研也慢慢地落下了它的帷幕。从整体上来看,今年的考研数学试卷依旧延续了以往的特点:覆盖广泛、重点突出,着重考查了“三基与五能力”。即对基本概念、基本原理、基本方法、数学计算能力、逻辑推理能力、空间想象能力、利用数学知识分析并解决实际问题的能力、概括能力的考查。从难度上看,2020年数学一与2019年稍难,特色特别鲜明。下面我们来具体分析: 选择题,高等数学考查了无穷小的比较、导数定义、多元函数可微定义、阿贝尔定理等知识点难度适中,但灵活性较强,对学生的基本功要求较高。 线性代数涉及了线性表出、初等变换两个考查对象,其中线性表示与空间直线进行关联,有一定的难度。 概率与统计考查了中心极限定理,这个考点有点意料之外,但如果知道中心极限定理的意义还是比较简单的。 填空题,高等数学涉及了∞-∞极限计算、参数方程求导、反常积分计算、偏导计算都属于常规考点,比较简单。 线性代数考查了四阶行列式的计算,难度不大。 概率考到了协方差的计算,属于概念题,容易上手。总的来说,填空题没有难度。 解答题部分主要考查综合考查了计算能力、分析和解决问题的能力,突出了综合性和计算量大的特点,其中高等数学有二元函数极值的计算、第二类曲线积分的计算、第二类曲面积分的计算、无穷级数的求和问题和中值定理的相关证明。中值定理的证明一直都是考生的弱项,得分率会比较低;第二类曲面积分的计算难度较大,考生们的计算方法主要来自高斯公式,但今年的题目却要求利用原始定义、即化为二重积分计算,许多考生没想到,得分率
会低一些;其他的题目都在可控范围内,由此可发现2020考研数学一较2019难一点。 线性代数比较简单,第20考查了矩阵的可逆性判定及相似对角化的判定问题,属于常规考点,难度不大。第21题考查了二次型的标准型问题,属于常规题型,较易完成。 概率论与数理统计第22题考查了分布函数的求解,主要是利用全概率公式,这在以往的真题中比较常见;第23依旧考查最大似然估计,极为常见,难度不大。 综上,2020年数学一,高等数学难度稍大于2019,出高分比较难。 结合2020年考研数学特点,我们建议备考2021年考研的考生注意以下几个问题:(1)重视基础。研究生入学考试是个选拔性考试但同时也是一个面向大众化的考试,不是竞赛,所以普通题目肯定占了绝大多数,考生们只要抓住“三基”就可做到以不变应万变。建议考生从当年1至6月认真读书,整理笔记、打牢基础。 (2)重视计算,眼界放宽,突出特色。数学一难的就是综合性强,覆盖面广,考生摸不清考试方向。建议考生可在7-10月强化学习中,认真总结和归纳重点题型和方法,通过练习和常见结论迅速提高运算能力,同时能明确考纲中数学一的特色知识,例如空间解析几何与向量代数、曲线曲面积分、空间曲线的切法与法平面、空间曲面的切平面与法线、傅里叶级数等。 (3)重视真题。考研数学已经历30多年,其中产生的规律、套路不容抹杀,考生应有效利用。建议考生在11月至考前认真对待真题,反复研究,搞清楚是什么,用什么,为什么方能真正笑傲考场。 最后,祝愿2020考生都能如愿进入理想学府!
第三章线性系统的时域分析方法 教学目的:通过本章学习,熟悉控制系统动态性能指标定义,掌握线性系统稳定的充要条件和劳斯判椐的应用,以及稳态误差计算方法,掌握一阶、 二阶系统的时域分析方法。 教学重点:掌握系统的动态性能指标,能熟练地应用劳斯判椐判断系统稳定性,二阶系统的动态响应特性分析。 教学难点:高阶系统的的动态响应特性分析。 本章知识结构图: 系统结构图闭环传递函数 一阶标准式 二阶标准式 特征方程稳定性、稳定域 代数判据 误差传递函数误差象函数终值定理稳态误差开环传递函数系统型别、开环增益 公式 静态误差系数 第九讲
3.1 系统时间响应的性能指标 一、基本概念 1、时域分析方法:根据系统的数学模型求出系统的时间响应来直接分析和评价系统的方法。 (1)响应函数分析方法:建立数学模型→确定输入信号→求出输出响应→ 根据输出响应→系统分析。 (2)系统测试分析方法:系统加入扰动信号→测试输出变化曲线→系统分析。 系统举例分析:举例:原料气加热炉闭环控制系统 2、分析系统的三大要点 (1)动态性能(快、稳) (2)稳态性能(准) (3)稳定性(稳) 二、动态性能及稳态性能 1、动态过程(过渡过程):在 典型信号作用下,系统输出从初始状态到最终状态的响应过程。(衰减、发散、等幅振荡) 2、稳态过程:在典型信号作 用下,当t → ∞ 系统输出量表现的方式。表征输出量最终复现输入量的程度。(稳态误差描述) 3、动态稳态性能指标 图3-1温度控制系统原理图 (1)上升时间tr :从稳态值的10%上升到稳态值的90%所需要的时间。 (2)峰值时间tp :从零时刻到达第一个峰值h(tp)所用的时间。 (3)超调量δ%:最大峰值与稳态值的差与稳态值之比的百分数。(稳) (3-1) %100)(()(%?∞∞-= h h t h p ) δ
《机电系统控制基础》大作业一 基于MATLAB的机电控制系统响应分析 哈尔滨工业大学 2013年11月4日
1 作业题目 1. 用MATLAB 绘制系统2 ()25()() 425 C s s R s s s Φ== ++的单位阶跃响应曲线、单位斜坡响应曲线。 2. 用MATLAB 求系统2 ()25 ()()425 C s s R s s s Φ==++的单位阶跃响应性能指标:上升时间、峰值时间、调节时间和超调量。 3. 数控直线运动工作平台位置控制示意图如下: X i 伺服电机原理图如下: L R (1)假定电动机转子轴上的转动惯量为J 1,减速器输出轴上的转动惯量为J 2,减速器减速比为i ,滚珠丝杠的螺距为P ,试计算折算到电机主轴上的总的转动惯量J ; (2)假定工作台质量m ,给定环节的传递函数为K a ,放大环节的传递函数为K b ,包括检测装置在内的反馈环节传递函数为K c ,电动机的反电势常数为K d ,电动机的电磁力矩常数为K m ,试建立该数控直线工作平台的数学模型,画出其控制系统框图; (3)忽略电感L 时,令参数K a =K c =K d =R=J=1,K m =10,P/i =4π,利用MATLAB 分析kb 的取值对于系统的性能的影响。
2 题目1 单位脉冲响应曲线 单位阶跃响应曲线
源代码 t=[0:0.01:1.6]; %仿真时间区段和输入 nC=[25]; dR=[1,4,25]; fi=tf(nC,dR); %求系统模型 [y1,T]=impulse(fi,t); [y2,T]=step(fi,t); %系统响应 plot(T,y1); xlabel('t(sec)'),ylabel('x(t)'); grid on; plot(T,y2); xlabel('t(sec)'),ylabel('x(t)'); grid on; %生成图形 3 题目2 借助Matlab,可得: ans = 0.4330 0.6860 25.3826 1.0000 即
线性系统时域分析 理论基础 求解零状态响应 1 2 ?→0 =-∞ 连续时间信号 f (t ) 和 f (t ) 的卷积运算可用信号的分段求和来实现,即: ∞ ∞ f (t ) = f 1 (t )* f 2 (t ) = ?-∞ f 1 (τ ) f 2 (t -τ )d τ = lim ∑ f 1 (k ?) f 2 (t - k ?) ? ? k 如果只求当t = n ?(n 为整数)时 f (t ) 的值 f (n ?) ,则上式可得: ∞ ∞ f (n ?) = ∑ f 1 (k ?) f 2 (n ? - k ?) ? ? = ?∑ f 1 (k ?) f 2[(n - k )?] (2-1) k =-∞ ∞ k =-∞ 式(2-1)中的 ∑ f 1 (k ?) f 2[(n - k )?] 实际上就是连续时间信号 f 1 (t ) 和 f 2 (t ) 经等时间间隔? k =-∞ 均匀抽样的离散序列 f 1 (k ?) 和 f 2 (k ?) 的卷积和。当? 足够小时, f (n ?) 就是卷积积分的结果——连续时间信号 f (t ) 的较好数值近似。 因此,用 MA TL A B 实现连续信号 f 1 (t ) 和 f 2 (t ) 卷积的过程如下: 1、将连续信号 f 1 (t ) 和 f 2 (t ) 以时间间隔? 进行取样,得到离散序列 f 1 (k ?) 和 f 2 (k ?) ; 2、构造与 f 1 (k ?) 和 f 2 (k ?) 相应的时间向量k 1 和k 2(注意,k 1 和k 2 的元素不是整数,而是取样间隔? 的整数倍的时间间隔点); 3、调用 MATLAB 命令 conv()函数计算积分 f (t ) 的近似向量 f (n ?) ; 4、构造 f (n ?) 对应的时间向量k 。
考研辅导机构对比 一、师资对比 启航 政治:李海洋讲课内容:马克思主义原理研界地位:中国人民大学教授,马原辅导第一人,国家考研阅卷组成员,全国著名考研政治辅导专家。 辛逸讲课内容:中国近代史纲要当代世界经济与政治形势与政策 研界地位:中国人民大学教授,中国近现代史课题组组长,国家考研阅卷组组长,考试大纲起草与制定者之一。 黄征讲课内容:毛中特思修与法基研界地位:中国人民大学博士,中国现代史学会,毛特辅导新锐代表,国家考研阅卷组副组长和试卷分析资深专家。 石磊讲课内容:政治专项解析研界地位:全国考研辅导中的精英人物和权威代表,应试天才,全国唯一一位授课满意度100%的老师。 杨凤城讲课内容:毛中特研界地位:中国人民大学教授,马列院院长,“考研总指挥棒”,考试大纲起草与制定者, 英语:张子宏研界地位:国家考研阅卷组组长,启航教育集团全国独家师资。 王若平研界地位:“考试虫”系列图书总编,万能作文创始人,考研“难句之父”,留美博士,启航集团独家授课专家。 黄涛研界地位:留英学者,国家考研阅卷组成员,著名考研英语辅导专家,北京大学光华管理学院兼副职教授。 曹其军研界地位:北京大学教授,“应试大师”、“新生代领袖”,考研英语辅导顶级专家,考研英语阅卷组成员。 商志研界地位:启航英语教研室主任,“考研路上最不可错过的一位英语老师”中国英语单词传奇第一人,传奇作文创始人。 数学:黄庆怀研界地位:“高数辅导第一人”,研究生入学考试数学阅卷组核心成员,全国著名考研数学辅导专家。 李永乐研界地位:“线代王”,清华大学应用数学系教授,北京地区考研数学阅卷组组长。 邵峰研界地位:著名考研辅导专家,国家考研阅卷组成员,清华大学博士,实力派代表。 盛北平研界地位:启航教育集团独家授课师资,北京信息科技大学教授,北京考研辅导实力派代表,真正的数学状元缔造者。 文都 政治:蒋中庭讲课内容:思修与法基毛中特当代世界经济与政治形式与政策业界地位:全国著名考研辅导专家,中国人民大学马克思主义学博士。 徐之明讲课内容:马克思主义基本原理概论,当代世界经济与政治形式与政策业界地位:中国人民大学国家学院教授,学者型考研辅导专家,国家社会科学基金研究项目主持人,考研阅卷组成员。 李海洋 英语:徐绽讲课内容:阅读理解写作翻译词汇 业界地位:著名考研辅导专家,全国最受欢迎的考研英语辅导专家,英
第三章 控制系统的时域分析法 一、知识点总结 1.掌握典型输入信号(单位脉冲、单位阶跃、单位速度、单位加速度、正弦信号)的拉氏变换表达式。 2.掌握系统动态响应的概念,能够从系统的响应中分离出稳态响应分量和瞬态响应分量;掌握系统动态响应的性能评价指标的概念及计算方法(对于典型二阶系统可以直接应用公式求解,非典型二阶系统则应按定义求解)。 解释:若将系统的响应表达成拉普拉氏变换结果(即S 域表达式),将响应表达式进行部分分式展开,与系统输入信号极点相同的分式对应稳态响应;与传递函数极点相同的分式对应系统的瞬态响应。将稳态响应和瞬态响应分式分别进行拉氏逆变换即获得各自的时域表达式。 性能指标:延迟时间、上升时间、峰值时间、调节时间、超调量 3.掌握一阶系统的传递函数形式,在典型输入信号下的时域响应及其响应特征;掌握典型二阶系统的传递函数形式,掌握欠阻尼系统的阶跃响应时域表达及其性能指标的计算公式和计算方法;了解高阶系统的性能分析方法,熟悉主导极点的概念,定性了解高阶系统非主导极点和零点对系统性能的影响。 tr tp ts td
4.熟悉两种改善二阶系统性能的方法和结构形式(比例微分和测速反馈),了解两种方法改善系统性能的特点。 5.掌握系统稳定性分析方法:劳斯判据的判断系统稳定性的判据及劳斯判据表特殊情况的构建方法(首列元素出现0,首列出现无穷大,某一行全为0);掌握应用劳斯判据解决系统稳定裕度问题的方法。了解赫尔维茨稳定性判据。 6.掌握稳态误差的概念和计算方法;掌握根据系统型别和静态误差系数计算典型输入下的稳态误差的方法(可直接应用公式);了解消除稳态误差和干扰误差的方法;了解动态误差系数法。 二、相关知识点例题 例1. 已知某系统的方块图如下图1所示,若要求系统的性能指标为: δδ%=2222%,tt pp=1111,试确定K和τ的值,并计算系统单位阶跃输入下的特征响应量:tt,tt。 图1 解:系统闭环传递函数为:Φ(s)=CC(ss)RR(ss)=KK ss2+(1+KKKK)ss+KK 因此,ωnn=√KK,ζζ=1+KKKK2√KK, δ%=e?ππππ?1?ππ2?ζζ=0.46, t pp=ππωωdd=1ss?ωdd=ωnn?1?ζζ2=3.14 ?ωnn=3.54 K=ωnn2=12.53,τ=2ζζωnn?1KK=0.18 t ss=3ζζωωnn=1.84ss
武汉工程大学 实验报告 专业 班号 组别 指导教师 姓名 学号 实验名称 线性系统时域响应分析 一、实验目的 1.熟练掌握step( )函数和impulse( )函数的使用方法,研究线性系统在单位阶跃、单位脉冲及单位斜坡函数作用下的响应。 2.通过响应曲线观测特征参量ζ和n ω对二阶系统性能的影响。 3.熟练掌握系统的稳定性的判断方法。 二、实验内容 1.观察函数step( )和impulse( )的调用格式,假设系统的传递函数模型为 1 4647 3)(2 342++++++=s s s s s s s G 可以用几种方法绘制出系统的阶跃响应曲线试分别绘制。 2.对典型二阶系统 2 22 2)(n n n s s s G ωζωω++= 1)分别绘出)/(2s rad n =ω,ζ分别取0,,,和时的单位阶跃响应曲线,分析参数ζ对系统的影响,并计算ζ=时的时域性能指标ss s p r p e t t t ,,,,σ。 2)绘制出当ζ=, n ω分别取1,2,4,6时单位阶跃响应曲线,分析参数n ω对系统的影响。 3.系统的特征方程式为010532234=++++s s s s ,试用两种判稳方式判别该系统的稳定性。 4.单位负反馈系统的开环模型为 ) 256)(4)(2()(2++++= s s s s K s G
试用劳斯稳定判据判断系统的稳定性,并求出使得闭环系统稳定的K 值范围。 三、实验结果及分析 1.观察函数step( )和impulse( )的调用格式,假设系统的传递函数模型为 14647 3)(2342++++++=s s s s s s s G 可以用几种方法绘制出系统的阶跃响应曲线试分别绘制。 方法一:用step( )函数绘制系统阶跃响应曲线。 程序如下: num=[0 0 1 3 7]; den=[1 4 6 4 1]; t=0::10; step(num,den) grid xlabel('t/s'),ylabel('c(t)') title('Unit-step Response of G(s)=s^2+3s+7/(s^4+4s^3+6s^2+4s+1)') Unit-step Response of G(s)=s 2+3s+7/(s 4+4s 3+6s 2+4s+1) t/s (sec) c (t ) 方法二:用impulse( )函数绘制系统阶跃响应曲线。 程序如下: num=[0 0 0 1 3 7 ]; den=[1 4 6 4 1 0]; t=0::10; impulse(num,den) grid xlabel('t/s'),ylabel('c(t)') title('Unit-impulse Response of G(s)/s=s^2+3s+7/(s^5+4s^4+6s^3+4s^2+s)')
考研数学试卷分析 第一,总体难度不大,但覆盖面广。 试卷中高等数学占78%,分数值约为116分,线性代数占22%,分数值约为 34分。试卷结构为单选题8个,填空题6个,解答题9个(包括证明题)。选择 题1至6题考查高等数学知识点,7至8题考查线性代数知识点,填空题9至 13题考查高等数学知识点,14题考查线性代数知识点,解答题15至21题考查高等数学知识点,22至23题考查线性代数知识点。 如高等数学部分,试题中微积分部分涉及到的知识点有:求极限(数列极限、函数极限);无穷小的比较,连续与间断的判定,零点定理的应用;极限与导数的关系;根据导数的定义以及几何意义证明结论,求法线方程;隐函数求导; 导数的应用如微分中值定理,函数的极值,最值求法,拐点坐标;不定积分, 反常积分的求法;定积分的应用;二元函数的连续性,偏导数的求法;二重积 分的计算、线性微分方程的求解。 线性代数涉及知识点有:伴随矩阵与矩阵的关系;向量组的线性相关性, 非齐次方程组解的判定条件、特征值特征向量的计算、矩阵相似对角化的充分 条件。 第二,考研数学仍然侧重对基础知识运用的考查。 考研数学题目还是强调了“三基本”,即数学考试的目的就是对基本概念、 基本性质、基本原理的考察,这类考试性质没有变。考查学生的数学掌握水平,是否具有抽象思维能力、逻辑推理能力、空间想象能力和运算能力等。具体来说,从整体试卷来看,题目对知识点的综合性要求还是较高、题目具有一定的 灵活性。试卷中仍然还是微积分部分的难度高于线性代数的难度。今年的考题 包括一些选择题,如果平常复习仅仅是死记硬背,对于知识点不能灵活掌握运用,这种题做起来会有困难。
试卷分析报告范文6篇 试卷分析是教学环节中不可缺少的部分,它可以反映出学生的学习情况。试卷一直以来被用来检验教学成果,试卷帮助教师了解学生在每个阶段、每门课程的学习情况。如果能够对试卷质量进行量化分析,记录每位学生每一道题的答题情况,教师就可以有 针对性的对不同学科的重点和难点进行合理规划,使教学和指导复习真正做到有的放矢。本文是小编为大家整理的试卷分析报告范文,仅供参考。 试卷分析报告范文篇一:试卷分析报告参考模板 一、原始成绩分布情况分析 文学院2005级汉语言文学专业本科1班应考人数73人,实际参考人数72人,平均分为75、95、从成绩分布情况来看,最高分89、5分,最低分50分;80-90段30人,70―80段24人,这两段学生最多;60-70段14人,90分以上的没有,60分以下的4人。从总体看来,该班成绩分布合理,能够反映出学生学习的实际情况。 二、存在的主要问题及优点、典型性错误的分析 (一)试题内容分析 1、试题题型多样,题量合适 试题题型分为:填空题、选择题、判断题、名词解释、简答题、论述题、分析题等,按照认知能力,分为识记、理解、应用三个层次进行命题,既重视理论知识的考查,又重视应用能力的考查。填空题、名词解释、简答题主要考查学生对基础概念、基本理论的掌握情况;论述题重在考查学生利用所学理论分析问题和解决问题的能力;三个分析 题从不同角度考查学生语言分析和应用能力。
2、试题难度适中 本次考试依照考试大纲出题,既有对学生进行基本知识记忆考查的题目,又有考查学生分析能力的题目。试题的难度适中,各个等级所占的分数比例大体是:容易的占20%,较易的占30%,难度适中的占20%,较难的占30%。试题充分注意到语言学基本知识和语言应用分析能力的考查,同时也注意到适宜学生水平的发挥。例如义素分析、歧义结构分析等题目,可以考出各种程度学生的真实水平,能够拉开成绩档次。 3、试题题目设计较科学合理 各层次题目所占分数比例大体上是:识记占30%,理解占30%,应用占40%。命题覆盖各章,既全面考核,又突出重点。各章题量所占比例是:导言、语言的社会功能、语言是符号系统占20%,语音占15%,汉字占5%,词汇占15%,语法占25%,语言的发展、语言的接触占20%。试题设计合理,表述清晰规范,语言简洁明了,考查问题明确;参考答案以及评分标准准确、具体。总的来说,符合试题设计的要求,没有知识性、技术性等方面的错误;同时为了配合学生的考研,注重了对学生运用知识的能力的考查,如用国际音标拼写古诗,在很大程度上满足了学生学以致用的需求。 由此可见,本套试题基本达到了要求的信度、效度,能够达到考查学生学习情况和各种能力的目的。 (二)典型性错误分析 从答卷的整体情况来看,客观题的答卷质量参差不齐,有的学生在填空题、名词解释这两种题型上得分较高,总体得分率应该在80%以上,显示了基础知识掌握的牢固性;但也有不少学生在这两道题上得分不高,例如填空题10分,有个别学生仅得1分;名词解释15分,个别学生仅得6分。究其原因,在于这部分学生学习态度不够认真,对教师平时课堂上补充的内容如"语义场"、"自源文字"等等不够重视,不记笔记,所以失分较多。选择题、判断题,学生的得分率较高,大部分学生这两题的失分率在20%以下,说明学生对于给出答案然后进行选择或判断还是有较强能力的。分析题,部分学生只记
实验报告 实验名称:实验1:控制系统的时域分析 课程名称:自控控制原理 专业:电气工程及其自动化 班级:130037 学生姓名:施苏伟 班级学号:13003723 指导教师:杨杨 实验日期:2015 年10 月16日
一、实验目的 1.观察控制系统的时域响应; 2.记录单位阶跃响应曲线; 3.掌握时间响应分析的一般方法; 4.初步了解控制系统的调节过程。 二.实验步骤: 1.将‘实验一代码’这个文件夹拷贝到桌面上; 2.开机进入Matlab6.1 运行界面(其他版本亦可); 3.通过下面方法将当前路径设置为‘实验一代码’这个文件夹所在的路径 4.Matlab 指令窗>>后面输入指令:con_sys; 进入本次实验主界面。 5.分别双击上图中的三个按键,依次完成实验内容。
6.本次实验的相关Matlab 函数: 传递函数G=tf([num],[den])可输入一传递函数,其中num、den 分别表示分子、分母按降幂排列的系数。 三、仿真结果: (一)观察一阶系统G=1/(T+s)的时域响应: T=5s T=8s
T=13s 结果分析:一阶系统 G=1/(T+s)的,通过观察曲线发现,随着时间常数T的增大,同种响应要达到相同响应的时间增大,说明T越大,响应越慢。 (二)二阶系统的时域性能分析 (1)
结果分析:自然频率和阻尼比的适当时,通过调节相应的时间,阶跃响应可以得到稳定值。 (2)数据一:自然频率=5.96rad/sec 阻尼比=0.701
数据二:自然频率=8.2964rad/sec 阻尼比=0.701 结果分析:要达到既定范围,自然频率增大阻尼比要随之增大 (3)
实验一线性控制系统时域分析 1、设控制系统如图1 所示,已知K=100,试绘制当H分别取H=0.1 ,0.2 0.5,1, 2,5,10 时,系统的阶跃响应曲线。讨论反馈强度对一阶 系统性能有何影响? 图1 答: A、绘制系统曲线程序如下: s=tf('s'); p1=(1/(0.1*s+1)); p2=(1/(0.05*s+1)); p3=(1/(0.02*s+1)); p4=(1/(0.01*s+1)); p5=(1/(0.005*s+1)); p6=(1/(0.002*s+1)); p7=(1/(0.001*s+1)); step(p1);hold on; step(p2);hold on; step(p3);hold on; step(p5);hold on; step(p6);hold on; step(p7);hold on;
B 、绘制改变H 系统阶跃响应图如下: 00.050.10.150.20.250.30.350.40.450.5 0.2 0.4 0.6 0.8 1 1.2 1.4 Step Response Time (seconds) A m p l i t u d e 结论: H 的值依次为0.1、0.2、0.5、1、2、5、10做响应曲线。matlab 曲线默认从第一条到第七条颜色依次为蓝、黄、紫、绿、红、青、黑,图中可知随着H 值得增大系统上升时间减小,调整时间减小,有更高的快速性。 2、 二阶系统闭环传函的标准形式为 22 2()2n n n s s s ωψξωω=++,设已知 n ω=4,试绘制当阻尼比ξ分别取0.2, 0.4, 0.6, 0.8, 1, 1.5, 2, 5 等值时,系统的单位阶跃响应曲线。求出ξ取值 0.2 ,0.5 ,0.8时的超调量,并求出ξ取值 0.2 ,0.5 ,0.8,1.5,5时的调节时间。讨论阻尼比变化对系统性能的影响。
课程名称:控制理论指导老师:成绩: 实验名称:控制系统的时域分析实验类型:冋组学生姓名: 、实验目的和要求 1用计算机辅助分析的办法,掌握系统的时域分析方法。 2. 熟悉SimUlink仿真环境。 二、实验内容和原理 (一)实验原理 系统仿真实质上就是对系统模型的求解,对控制系统来说,一般模型可转化成某个微分方程或差分方程表示,因此在仿真过程中,一般以某种数值算法从初态出发,逐步计算系统的响应,最后绘制出系统的响应曲线,进而可分析系统的性能。控制系统最常用的时域分析方法是,当输入信号为单位阶跃和单位冲激函数时,求出系统的输出响应,分别称为单位阶跃响应和单位冲激响应。在MATLAB中,提供了求取连 续系统的单位阶跃响应函数step,单位冲激响应函数impulse,零输入响应函数initial等等。 (二)实验内容 二阶系统,其状态方程模型为 U X I y = [1.9691 6.4493] +[0] U X2 1?画出系统的单位阶跃响应曲线; 2. 画出系统的冲激响应曲线; 3. 当系统的初始状态为x0=[1,0]时,画出系统的零输入响应; 4. 当系统的初始状态为零时,画出系统斜坡输入响应; (三)实验要求 1. 编制MATLAB程序,画出单位阶跃响应曲线、冲击响应曲线、系统的零输入响应、斜坡输入响应; 2. 在SimUIink仿真环境中,组成系统的仿真框图,观察单位阶跃响应曲线并记录之。 三、主要仪器设备 计算机一台以及matlab软件,SimUIink仿真环境 四、操作方法与实验步骤 1、程序解决方案: 在MATLAB 中建立文件shiyu.m ,其程序如下: %时域响应函数 fun ction G1 = shiyu( A,B,C,D)
考试分析报告范文6篇
————————————————————————————————作者:————————————————————————————————日期:
试卷分析报告范文6篇 试卷分析是教学环节中不可缺少的部分,它可以反映出学生的学习情况。试卷一直以来被用来检验教学成果,试卷帮助教师了解学生在每个阶段、每门课程的学习情况。如果能够对试卷质量进行量化分析,记录每位学生每一道题的答题情况,教师就可以有 针对性的对不同学科的重点和难点进行合理规划,使教学和指导复习真正做到有的放矢。本文是小编为大家整理的试卷分析报告范文,仅供参考。 试卷分析报告范文篇一:试卷分析报告参考模板 一、原始成绩分布情况分析 文学院2005级汉语言文学专业本科1班应考人数73人,实际参考人数72人,平均分为75、95、从成绩分布情况来看,最高分89、5分,最低分50分;80-90段30人,70―80段24人,这两段学生最多;60-70段14人,90分以上的没有,60分以下的4人。从总体看来,该班成绩分布合理,能够反映出学生学习的实际情况。 二、存在的主要问题及优点、典型性错误的分析 (一)试题内容分析 1、试题题型多样,题量合适 试题题型分为:填空题、选择题、判断题、名词解释、简答题、论述题、分析题等,按照认知能力,分为识记、理解、应用三个层次进行命题,既重视理论知识的考查,又重视应用能力的考查。填空题、名词解释、简答题主要考查学生对基础概念、基本理论的掌握情况;论述题重在考查学生利用所学理论分析问题和解决问题的能力;三个分析 题从不同角度考查学生语言分析和应用能力。
实验二 线性系统时域响应分析 一、实验目的 1.熟练掌握step( )函数和impulse( )函数的使用方法,研究线性系统在单位阶跃、单位脉冲及单位斜坡函数作用下的响应。 2.通过响应曲线观测特征参量ζ和n ω对二阶系统性能的影响。 二、基础知识及MATLAB 函数 (一)基础知识 时域分析法直接在时间域中对系统进行分析,可以提供系统时间响应的全部信息,具有直观、准确的特点。为了研究控制系统的时域特性,经常采用瞬态响应(如阶跃响应、脉冲响应和斜坡响应)。本次实验从分析系统的性能指标出发,给出了在MATLAB 环境下获取系统时域响应和分析系统的动态性能和稳态性能的方法。 用MATLAB 求系统的瞬态响应时,将传递函数的分子、分母多项式的系数分别以s 的降幂排列写为两个数组num 、den 。由于控制系统分子的阶次m 一般小于其分母的阶次n ,所以num 中的数组元素与分子多项式系数之间自右向左逐次对齐,不足部分用零补齐,缺项系数也用零补上。 1.用MATLAB 求控制系统的瞬态响应 1)阶跃响应 求系统阶跃响应的指令有: step(num,den) 时间向量t 的范围由软件自动设定,阶跃响应曲线 随即绘出 step(num,den,t) 时间向量t 的范围可以由人工给定(例如 t=0:0.1:10) [y ,x]=step(num,den) 返回变量y 为输出向量,x 为状态向量 在MATLAB 程序中,先定义num,den 数组,并调用上述指令,即可生成单位阶跃输入信号下的阶跃响应曲线图。 考虑下列系统: 25 425 )()(2++=s s s R s C 该系统可以表示为两个数组,每一个数组由相应的多项式系数组成,并且以s
第三章 线性系统的时域分析与校正 习题及答案 3-1 已知系统脉冲响应 t e t k 25.10125.0)(-= 试求系统闭环传递函数)(s Φ。 解 Φ()()./(.)s L k t s ==+00125125 3-2 设某高阶系统可用下列一阶微分方程 T c t c t r t r t ?? +=+()()()()τ 近似描述,其中,1)(0<-<τT 。试证系统的动态性能指标为 T T T t d ?? ? ?????? ??-+=τln 693.0 t T r =22. T T T t s ?? ??? ? -+=)ln( 3τ 解 设单位阶跃输入s s R 1)(= 当初始条件为0时有: 1 1 )()(++=Ts s s R s C τ 1 11 11)(+--= ? ++= ∴ Ts T s s Ts s s C ττ C t h t T T e t T ()()/==---1τ 1) 当 t t d = 时 h t T T e t t d ()./==---051τ 12=--T T e t T d τ/ ; T t T T d -??? ??-=-τln 2ln ????? ???? ??-+=∴ T T T t d τln 2ln
2) 求t r (即)(t c 从1.0到9.0所需时间) 当 T t e T T t h /219.0)(--- ==τ; t T T T 201=--[ln()ln .]τ 当 T t e T T t h /111.0)(---==τ; t T T T 109=--[ln()ln .]τ 则 t t t T T r =-==21 09 01 22ln ... 3) 求 t s T t s s e T T t h /195.0)(---==τ ]ln 3[]20ln [ln ]05.0ln [ln T T T T T T T T T t s τ ττ-+=+-=--=∴ 3-3 一阶系统结构图如图3-45所示。要求系统闭环增益2=ΦK ,调节时间4.0≤s t s ,试确定参数21,K K 的值。 解 由结构图写出闭环系统传递函数 111)(212211211 +=+=+ =ΦK K s K K K s K s K K s K s 令闭环增益21 2 == ΦK K , 得:5.02=K 令调节时间4.03 32 1≤= =K K T t s ,得:151≥K 。 3-4 在许多化学过程中,反应槽内的温度要保持恒定, 图3-46(a )和(b )分别为开环和闭环温度控制系统结构图,两种系统正常的K 值为1。 (1) 若)(1)(t t r =,0)(=t n 两种系统从响应开始达到稳态温度值的63.2%各需多长时间? (2) 当有阶跃扰动1.0)(=t n 时,求扰动对两种系统的温度的影响。
信号与系统5年考研真题分析(不含14年真题) 从整体试卷分析,张延华老师是从09年以后开始出题的。09年之前的出题风格偏向于郑君里的两本紫书,基础知识比较多,应用问题比较少。张延华老师的这本书的思路与郑君里那两本书不同,它主要强调的是系统的概念,对系统的建模,所有的时域频域分析都是围绕着系统进行的。此外,张老师这本书对数学的要求比较高,尤其是微积分,所以在做此书的习题时可能会感觉有些难度。不过,只要数学基础扎实,解决考研真题还是没有问题的。下面就针对今5年的考研真题进行分类和总结。北京工业大学信号与系统考研真题题型主要包括选择题、填空题和解答题。其中选择题占20分10道题,每道两分,填空题占30分10道题,每道3分,解答题占100分,共8道大题,每道题的分数一句题目长短难易分配。根据试卷的结构可以看出,如果8道大题能够较正确的完成,那么考研专业课的分数将不会很低,所以大题是专业课复习的重中之重! 大题篇 8道大题: 第一类:连续卷积、离散卷积和、相关序列计算。(唯一一类涉及到时域分析的大题,每年必一道,分数大概在10分以内) 主要考点浏览:在信号与系统中,时域分析方法主要包含两大类:经典法和卷积。所谓的经典法就是利用微分方程搭建系统模型。该类方法比较基础,但是由于高阶微分方程求解较为困难,故该法的实用性不大,从而也就不是考查的重点(一般只会在选择题中出一些概念性问题)。卷积是信号与系统中常用于时域分析的方法。该方法计算较为简便,而且能够在时域中描述系统特性(时域和频域之间的转化桥梁是卷积定理,它将冲激响应和系统函数紧密的联系在一起),故卷积法是时域分析法中考查的重点。卷积法主要分为连续信号的卷积和离散序列的卷积和以及求解相关序列(卷积的一种变形)。近5年的真题主要考查的是离散序列的卷积,主要利用的方法是对位相乘求和法。根据张老师的一贯思想,
第3章 线性系统的时域分析 学习要点 1控制系统时域响应的基本概念,典型输入信号及意义; 2控制系统稳定性的概念、代数稳定判据及应用; 3控制系统的时域指标,一阶二阶系统的阶跃响应特性与时域指标计算; 4高阶系统时域分析中主导极点和主导极点法; 5 控制系统稳态误差概念、计算方法与误差系数,减小稳态误差的方法。 思考与习题祥解 题 思考与总结下述问题。 (1)画出二阶系统特征根在复平面上分布的几种情况,归纳ξ值对二阶系统特征根的影响规律。 (2)总结ξ和n ω对二阶系统阶跃响应特性的影响规律。 (3)总结增加一个零点对二阶系统阶跃响应特性的影响规律。 (4)分析增加一个极点可能对二阶系统阶跃响应特性有何影响 (5)系统误差与哪些因素有关试归纳减小或消除系统稳态误差的措施与方法。 (6)为减小或消除系统扰动误差,可采取在系统开环传递函数中增加积分环节的措施。请问,该积分环节应在系统结构图中如何配置,抗扰效果是否与扰动点相关 答:(1)二阶系统特征根在复平面上分布情况如图所示。 图 二阶系统特征根在复平面上的分布 当0ξ=,二阶系统特征根是一对共轭纯虚根,如图中情况①。 当01ξ<<,二阶系统特征根是一对具有负实部的共轭复数根,变化轨迹是 以n ω为半径的圆弧,如图中情况②。 当1ξ=,二阶系统特征根是一对相同的负实根,如图中情况③。 当1ξ>,二阶系统特征根是一对不等的负实根,如图中情况④。
(2)ξ和n ω是二阶系统的两个特征参量。 ξ是系统阻尼比,描述了系统的平稳性。 当0ξ=,二阶系统特征根是一对共轭纯虚根,二阶系统阶跃响应为等幅振荡特性,系统临界稳定。 当01ξ<<,二阶系统特征根是一对具有负实部的共轭复数根,二阶系统阶跃响应为衰减振荡特性,系统稳定。ξ越小,二阶系统振荡性越强,平稳性越差; ξ越大,二阶系统振荡性越弱,平稳性越好。因此,二阶系统的时域性能指标超 调量由ξ值唯一确定,即001_ 100%2 ?=-π ξξ σe 。在工程设计中,对于恒值控制系 统,一般取 ξ=~;对于随动控制系统ξ=~。 n ω是系统无阻尼自然振荡频率,反映系统的快速性。当ξ一定,二阶系统的 时域性能指标调节时间与n ω值成反比,即34 s n t ξω≈:。 (3)二阶系统增加一个零点后,增加了系统的振荡性,将使系统阶跃响应的超调量增大,上升时间和峰值时间减小。 所增加的零点越靠近虚轴,则上述影响就越大;反之,若零点距离虚轴越远,则其影响越小。 (4)二阶系统增加一个极点后,减弱了系统的振荡性,将使系统阶跃响应的超调量减小,上升时间和峰值时间减小; 所增加的极点越靠近虚轴,则上述影响就越大;反之,若极点距离虚轴越远,则其影响越小。 (5)系统误差与系统的误差度(开环传递函数所含纯积分环节的个数或系统型别)、开环放大系数,以及作用于系统的外部输入信号有关。如果是扰动误差还与扰动作用点有关。 因此,减小或消除系统稳态误差的措施与方法有:增大开环放大系数,增加系统开环传递函数中的积分环节,引入按给定或按扰动补偿的复合控制结构。 无论采用何种措施与方法减小或消除系统稳态误差,都要注意系统须满足稳定的条件。 (6)采取在系统开环传递函数中增加积分环节的措施来减小或消除系统扰动误差时,所增加的积分环节须加在扰动作用点之前。若所增加的积分环节加在扰动作用点之后,则该积分环节无改善抗扰效果作用。这一点可以通过误差表达式分析得到。 题系统特征方程如下,试判断其稳定性。 (a )0203.002.023=+++s s s ; (b )014844122345=+++++s s s s s ; (c )025266.225.11.0234=++++s s s s 解:(a )稳定; (b )稳定; (c )不稳定。 题 系统结构如题图所示。控制器)1 1()(s T K s G i p c + =,为使该系统稳定,控制器参数p K 、i T 应满足什么关系
第3章 线性系统的时域分析 学习要点 1控制系统时域响应的基本概念,典型输入信号及意义; 2控制系统稳定性的概念、代数稳定判据及应用; 3控制系统的时域指标,一阶二阶系统的阶跃响应特性与时域指标计算; 4高阶系统时域分析中主导极点和主导极点法; 5 控制系统稳态误差概念、计算方法与误差系数,减小稳态误差的方法。 思考与习题祥解 题 思考与总结下述问题。 (1)画出二阶系统特征根在复平面上分布的几种情况,归纳ξ值对二阶系统特征根的影响规律。 【 (2)总结ξ和n ω对二阶系统阶跃响应特性的影响规律。 (3)总结增加一个零点对二阶系统阶跃响应特性的影响规律。 (4)分析增加一个极点可能对二阶系统阶跃响应特性有何影响 (5)系统误差与哪些因素有关试归纳减小或消除系统稳态误差的措施与方法。 (6)为减小或消除系统扰动误差,可采取在系统开环传递函数中增加积分环节的措施。请问,该积分环节应在系统结构图中如何配置,抗扰效果是否与扰动点相关 答:(1)二阶系统特征根在复平面上分布情况如图所示。 图 二阶系统特征根在复平面上的分布 当0ξ=,二阶系统特征根是一对共轭纯虚根,如图中情况①。 当01ξ<<,二阶系统特征根是一对具有负实部的共轭复数根,变化轨迹是 以n ω为半径的圆弧,如图中情况②。 @ 当1ξ=,二阶系统特征根是一对相同的负实根,如图中情况③。 当1ξ>,二阶系统特征根是一对不等的负实根,如图中情况④。
(2)ξ和n ω是二阶系统的两个特征参量。 ξ是系统阻尼比,描述了系统的平稳性。 当0ξ=,二阶系统特征根是一对共轭纯虚根,二阶系统阶跃响应为等幅振荡特性,系统临界稳定。 当01ξ<<,二阶系统特征根是一对具有负实部的共轭复数根,二阶系统阶跃响应为衰减振荡特性,系统稳定。ξ越小,二阶系统振荡性越强,平稳性越差; ξ越大,二阶系统振荡性越弱,平稳性越好。因此,二阶系统的时域性能指标超 调量由ξ值唯一确定,即001_ 100%2 ?=-π ξξ σe 。在工程设计中,对于恒值控制系 统,一般取 ξ=~;对于随动控制系统ξ=~。 n ω是系统无阻尼自然振荡频率,反映系统的快速性。当ξ一定,二阶系统的 时域性能指标调节时间与n ω值成反比,即34 s n t ξω≈。 (3)二阶系统增加一个零点后,增加了系统的振荡性,将使系统阶跃响应的超调量增大,上升时间和峰值时间减小。 所增加的零点越靠近虚轴,则上述影响就越大;反之,若零点距离虚轴越远,则其影响越小。 (4)二阶系统增加一个极点后,减弱了系统的振荡性,将使系统阶跃响应的超调量减小,上升时间和峰值时间减小; 所增加的极点越靠近虚轴,则上述影响就越大;反之,若极点距离虚轴越远,则其影响越小。 & (5)系统误差与系统的误差度(开环传递函数所含纯积分环节的个数或系统型别)、开环放大系数,以及作用于系统的外部输入信号有关。如果是扰动误差还与扰动作用点有关。 因此,减小或消除系统稳态误差的措施与方法有:增大开环放大系数,增加系统开环传递函数中的积分环节,引入按给定或按扰动补偿的复合控制结构。 无论采用何种措施与方法减小或消除系统稳态误差,都要注意系统须满足稳定的条件。 (6)采取在系统开环传递函数中增加积分环节的措施来减小或消除系统扰动误差时,所增加的积分环节须加在扰动作用点之前。若所增加的积分环节加在扰动作用点之后,则该积分环节无改善抗扰效果作用。这一点可以通过误差表达式分析得到。 题系统特征方程如下,试判断其稳定性。 (a )0203.002.023=+++s s s ; (b )014844122345=+++++s s s s s ; (c )025266.225.11.0234=++++s s s s ! 解:(a )稳定; (b )稳定; (c )不稳定。